Embed Size (px)
DESCRIPTION
Autonomous Localization & Navigation using 2D Laser Scanners. Animesh Garg & Manohar Paluri. Outline. Problem Description Motivation Previous research Proposed approach Details of our approach Testing Results Conclusion. Why an autonomous painting system is required?. Introduction. - PowerPoint PPT Presentation
Citation preview
Autonomous Localization & Navigation using 2D Laser
Scanners
Autonomous Localization & Navigation using 2D Laser
Scanners
Animesh Garg & Manohar Paluri
22
OutlineOutline
• Problem Description• Motivation• Previous research• Proposed approach• Details of our approach• Testing • Results• Conclusion

33
Why an autonomous painting system is required?Why an autonomous painting system is required?
44
IntroductionIntroduction
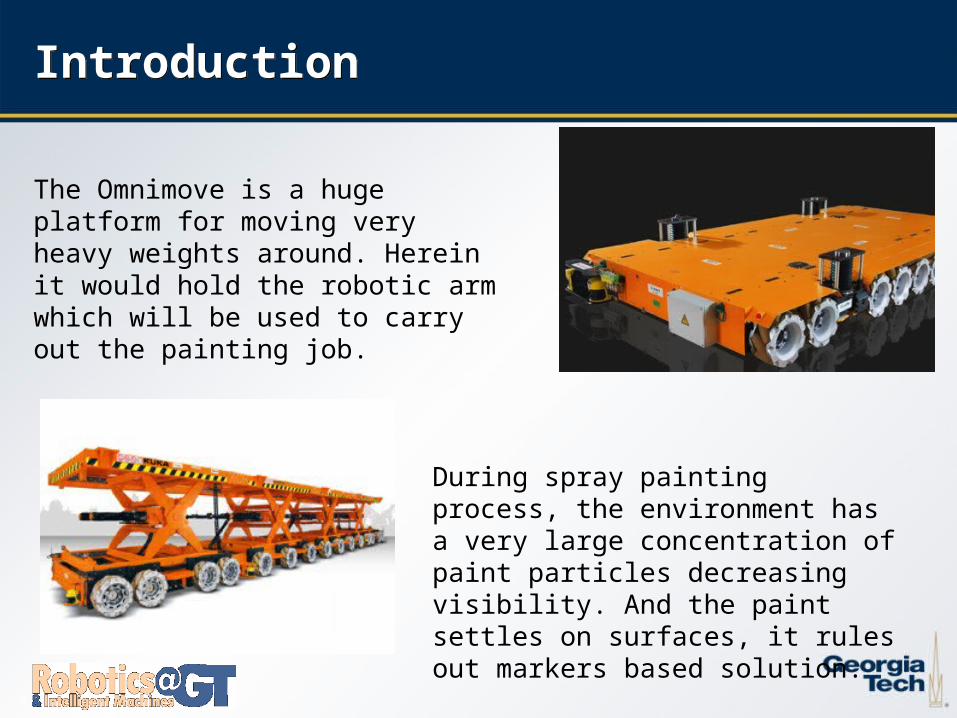
During spray painting process, the environment has a very large concentration of paint particles decreasing visibility. And the paint settles on surfaces, it rules out markers based solution.
The Omnimove is a huge platform for moving very heavy weights around. Herein it would hold the robotic arm which will be used to carry out the painting job.
55
Potential SolutionsPotential Solutions
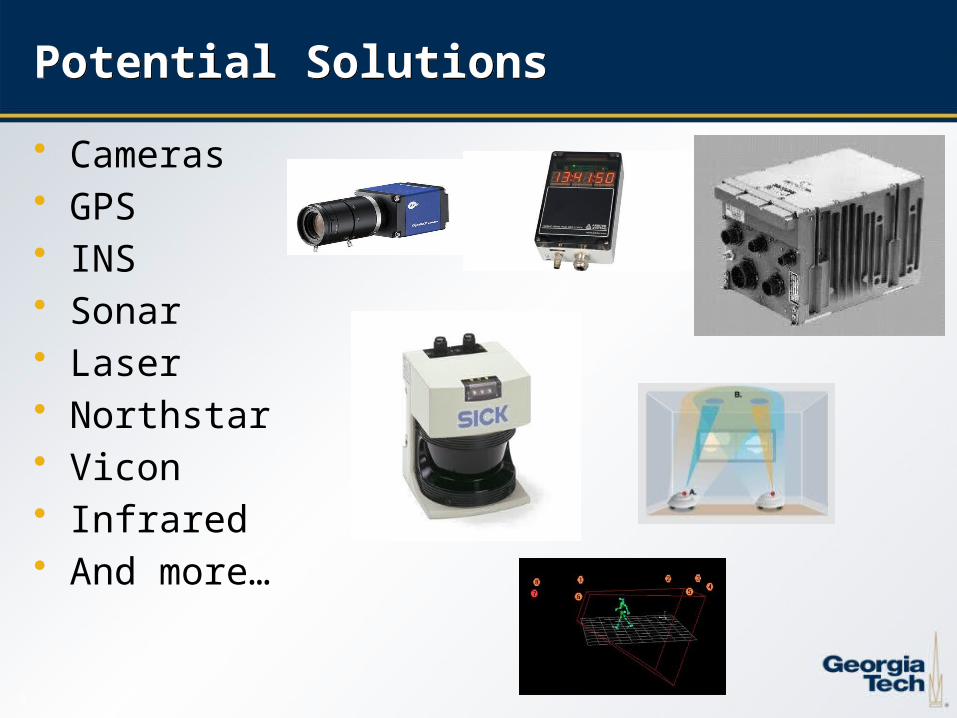
• Cameras• GPS• INS• Sonar• Laser• Northstar• Vicon• Infrared• And more…

66
Our solutionOur solution
Sample Mount
• Laser Scanners– Dense, Accurate, High
sampling rates, good range distance.
– Paint Hangar constraints
77
Past WorkPast Work
• Fast RANSAC based registration algorithm for accurate navigation using only Lidar. RANSAC in combination with Huber's kernel to overcome the LIDAR input noise.
• Hough transform for robot localization.The self localiza-tion technique in the paper is based on matching a geometric reference map with range information
• RRT-Connect, bi-directional decision trees.• RRT* - Combines advantages of RRGs optimal solution
with a tree structure.
88
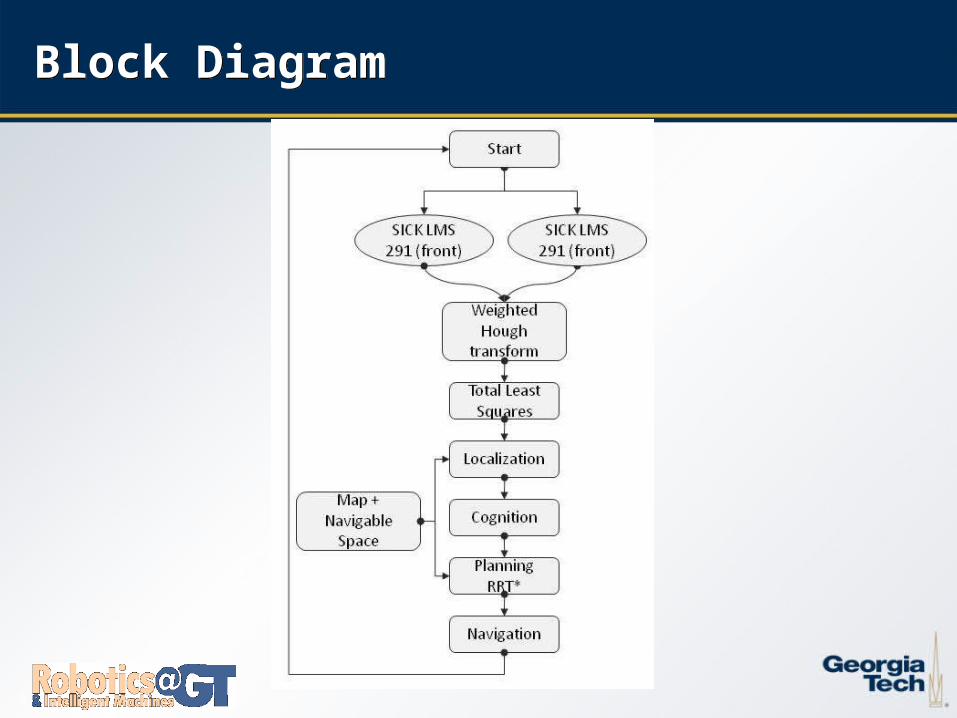
Block DiagramBlock Diagram
99
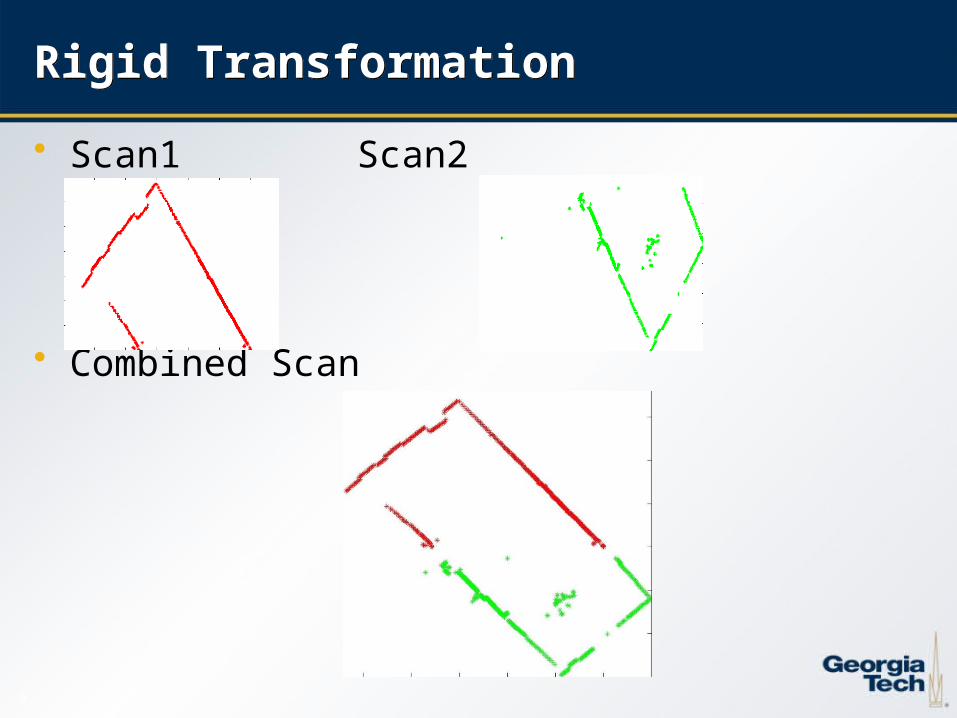
Rigid TransformationRigid Transformation
• Scan1 Scan2
• Combined Scan
1010
Line Extraction TechniquesLine Extraction Techniques
• Split-and-Merge• Line-Regression• Incremental• RANSAC• Hough-Transform• EM
How many lines are there ?Which points belong to which line ?Given the points that belong to a line, how to estimate the line model parameters ?
1111
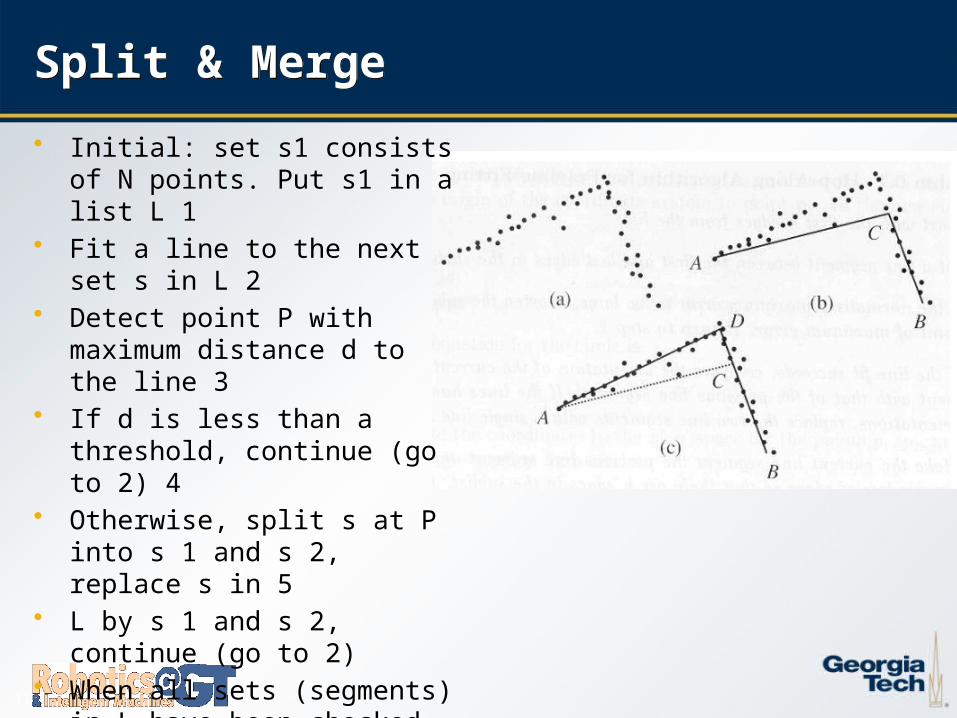
Split & MergeSplit & Merge
• Initial: set s1 consists of N points. Put s1 in a list L 1
• Fit a line to the next set s in L 2• Detect point P with maximum
distance d to the line 3• If d is less than a threshold,
continue (go to 2) 4• Otherwise, split s at P into s 1 and s
2, replace s in 5• L by s 1 and s 2, continue (go to 2)• When all sets (segments) in L have
been checked, 6• merge collinear segments.
1212
Hough TransformHough Transform
• Initial: A set of N points• Initialize the accumulator array (model space)• Construct values for the array• Choose the element with max. votes Vmax• If Vmax is less than a threshold, terminate• Otherwise, determine the inliers• Fit a line through the inliers and store the line• Remove the inliers from the set, goto 2
1313
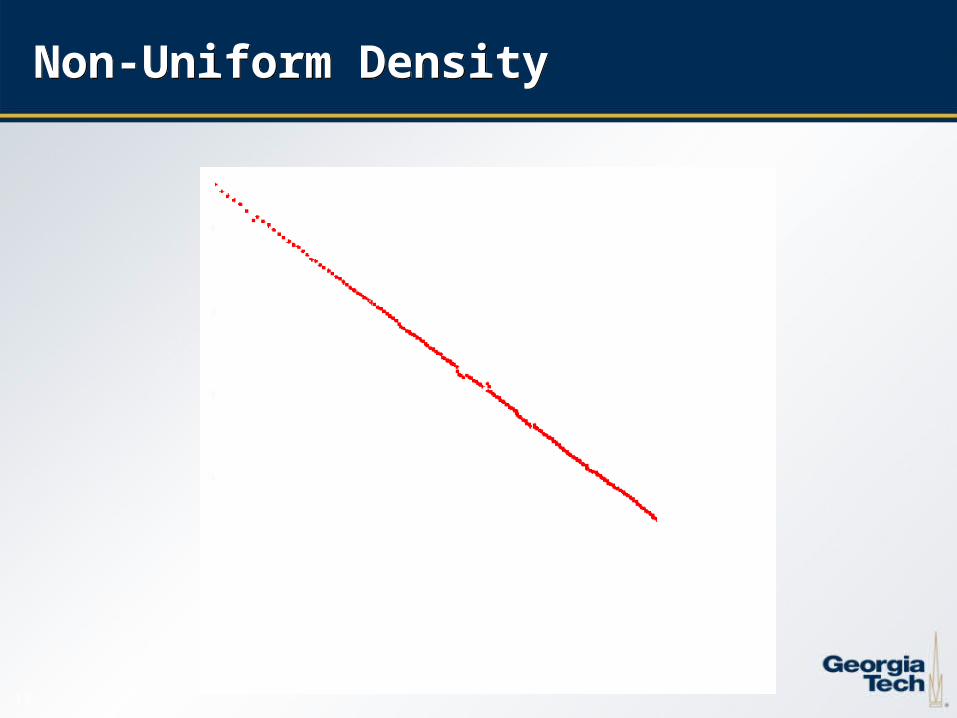
Non-Uniform DensityNon-Uniform Density
1414
Weighted Hough TransformWeighted Hough Transform
1515
Find Maximas – 5 constraintsFind Maximas – 5 constraints
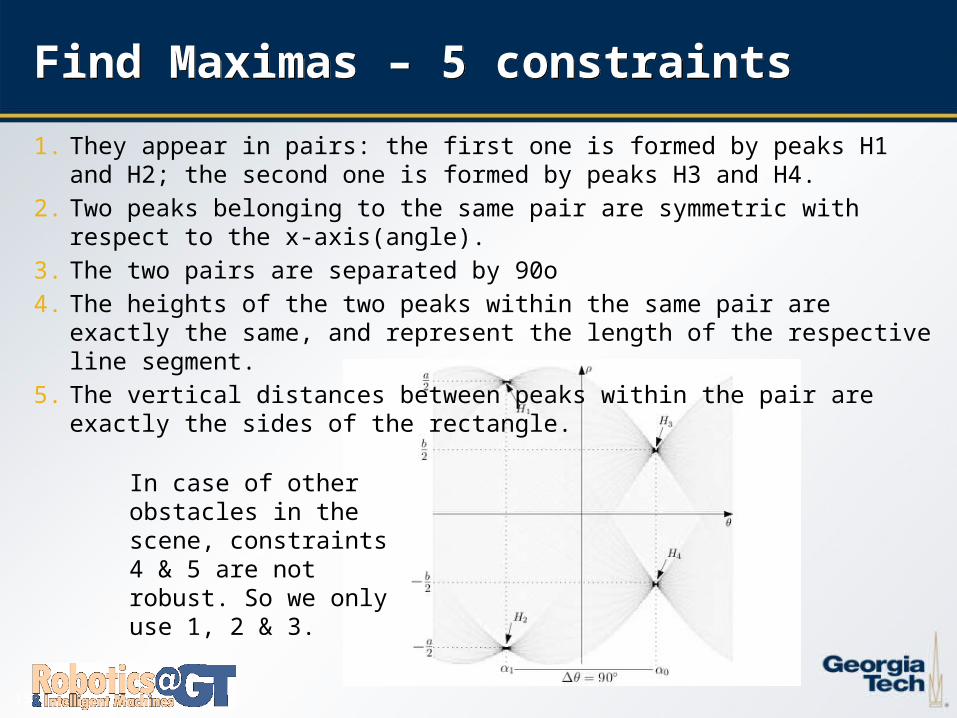
1. They appear in pairs: the first one is formed by peaks H1 and H2; the second one is formed by peaks H3 and H4.
2. Two peaks belonging to the same pair are symmetric with respect to the x-axis(angle).3. The two pairs are separated by 90o4. The heights of the two peaks within the same pair are exactly the same, and represent
the length of the respective line segment.5. The vertical distances between peaks within the pair are exactly the sides of the
rectangle.
In case of other obstacles in the scene, constraints 4 & 5 are not robust. So we only use 1, 2 & 3.
1616
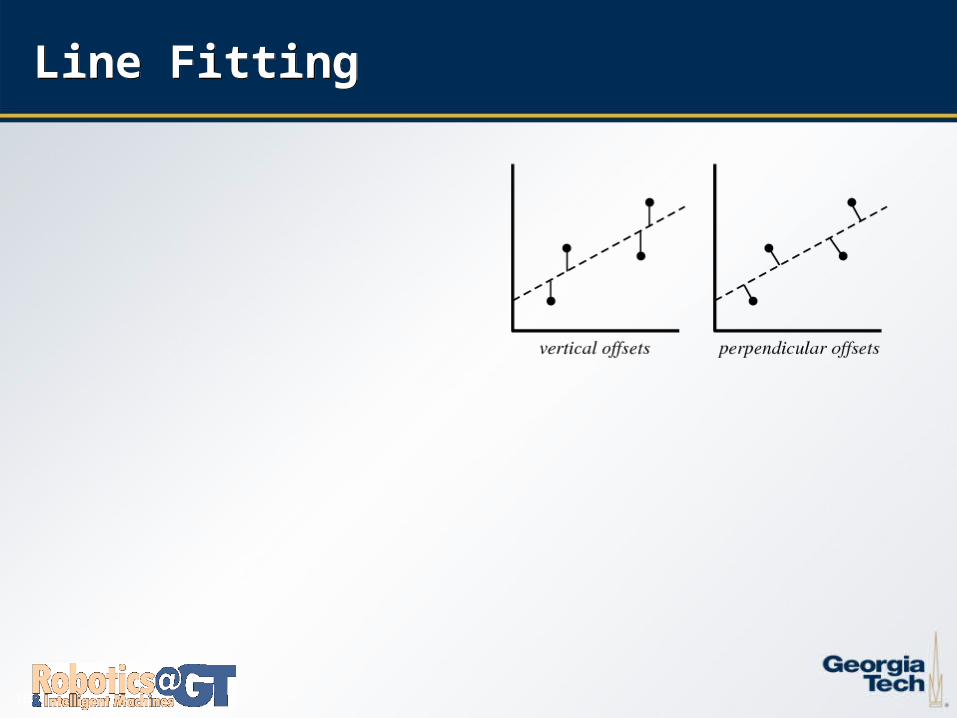
Line FittingLine Fitting
1717
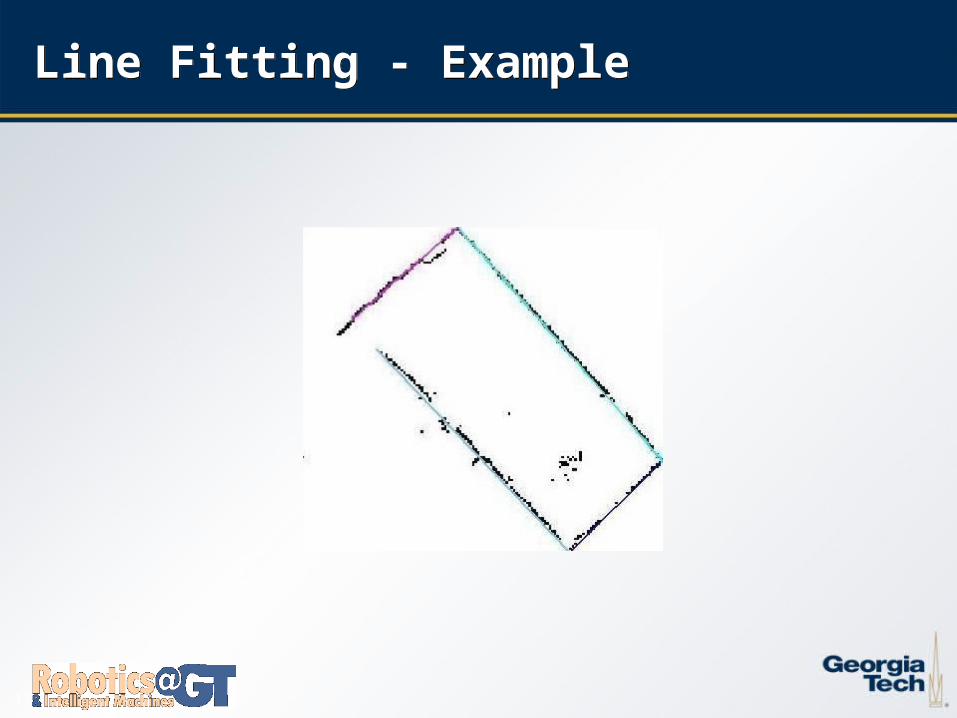
Line Fitting - ExampleLine Fitting - Example
1818
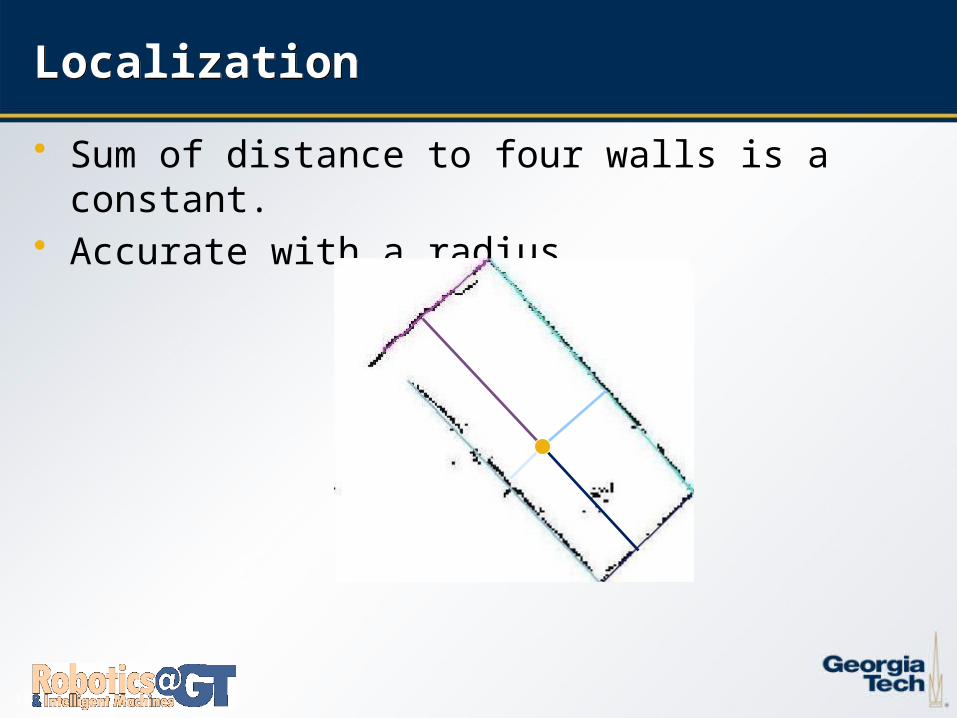
LocalizationLocalization
• Sum of distance to four walls is a constant.• Accurate with a radius
1919
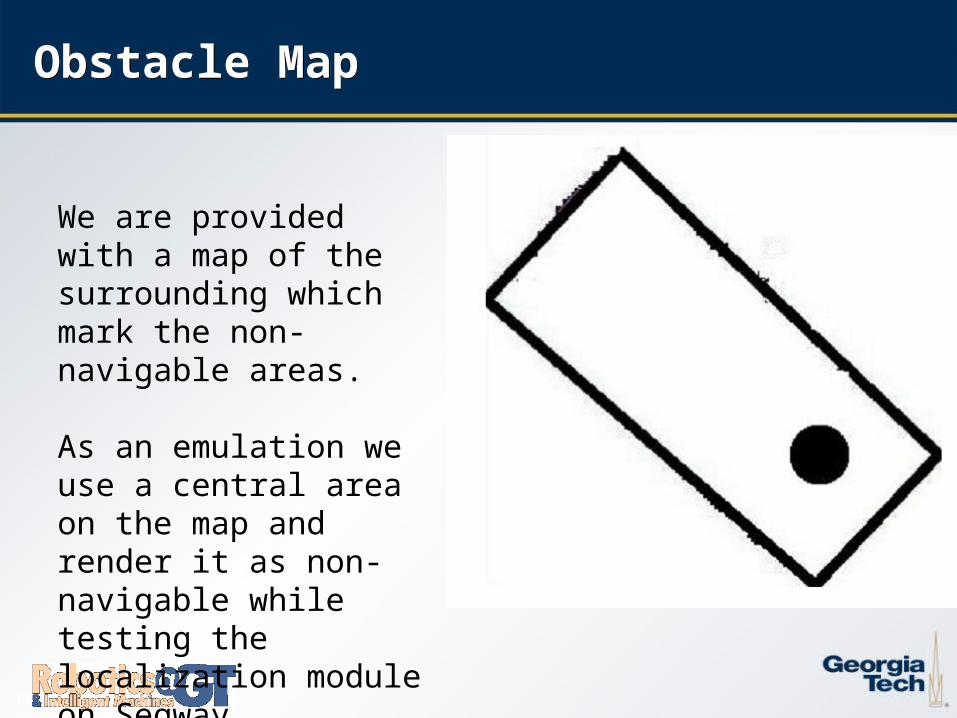
Obstacle MapObstacle Map
We are provided with a map of the surrounding which mark the non-navigable areas.
As an emulation we use a central area on the map and render it as non-navigable while testing the localization module on Segway
2020
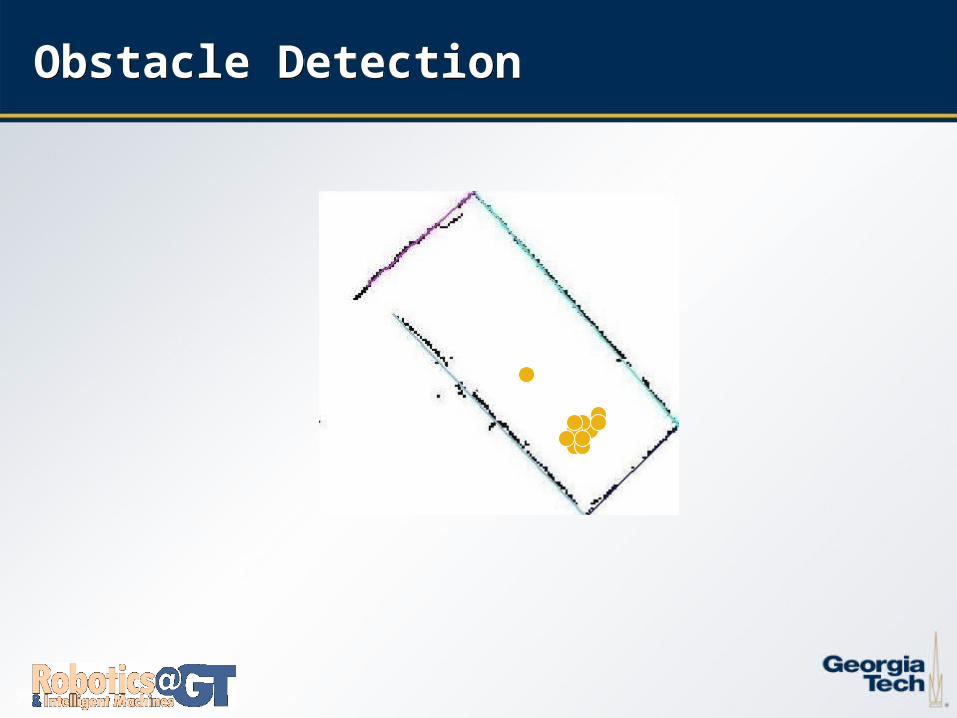
Obstacle DetectionObstacle Detection
2121
Planning – RRT* Planning – RRT*
• Incremental Sampling based Planning Algorithm• Asymptotic Optimality Guarantee• Similar to RRT and/or RRG (Rapidly exploring Random
Graphs) in the sense that they all have same body. However RRT* calculates the minimum cost from initial to current local goal point. Hence at every move from current configuration to a new configuration, accumulated cost of moving from start to present state.
2222
NavigationNavigation
• Use of Omnimove affects the conventional motion planning implementations.
• Ability to manipulated in all the directions make it easy to go to all the possible configurations.
2323
Testing on SegwayTesting on Segway
• Implementation of the Navigation module on the Segway platform for testing in partially known
2424
Conclusion & Future ScopeConclusion & Future Scope
2525
RecapRecap
• Boeing Paint Hangar automation• Hough Transform & Split-Merge line extraction• Hough rectangle constraints• Obstacle avoidance• RRT* planning• Segway testing• Final testing



























