Embed Size (px)
Citation preview
05-12-20 - Seite/Page 1
Automotive Software Engineering
Dr.-Ing. Mirko Conrad
DaimlerChrysler AG Research and TechnologyMirko.Conrad @ DaimlerChrysler.com
+49 30 39982-263
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Automotive Software Engineering
Teil II: Modell-basierte Softwareentwicklung
Teil I: Software-basierte eingebettete Systeme im Automobil
Gliederung
Teil III: Modell-basiertes Testen

05-12-20 - Seite/Page 2
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Automotive Software Engineering
Teil I: Software-basierte eingebettete Systeme im Automobil
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
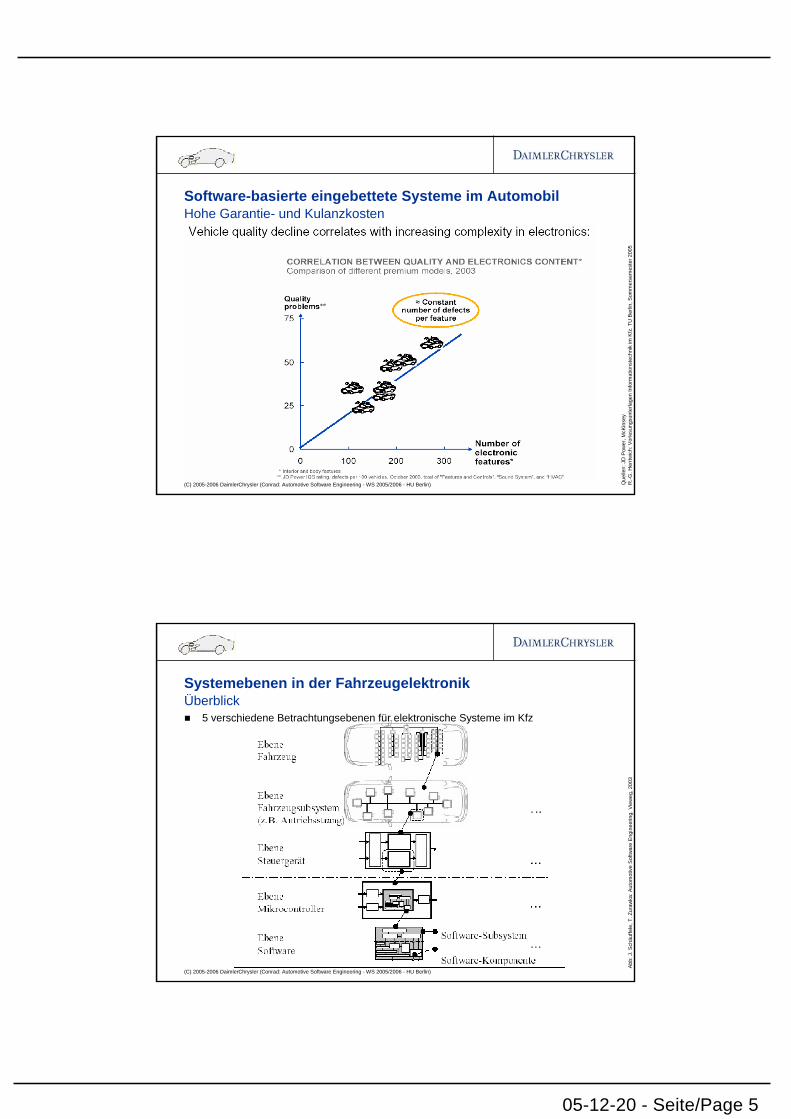
Software-basierte eingebettete Systeme im Automobil Bedeutung der Software im Fahrzeug / Herausforderungen
Software als Innovationsmotor und WettbewerbsvorteilElektronik treibt ca. 80% aller Innovationen, die wiederum zu 90% durch Softwarefunktionen bestimmt werden.
hohe GuK Kosten u.a. durch Software-basierte Innovationen
Entwicklungs- und Testprozess als limitierende FaktorenWährend die Komplexität und Leistungsfähigkeit eingebetteter Systeme im Kraftfahrzeug in der Vergangenheit stark durch die technischen Möglichkeiten, bspw. die Leistungsfähigkeit der Mikrocontroller, beeinflusst wurde, wird der Entwicklungs- und Testprozess der Systeme und der darin eingebetteten Software mehr und mehr zum limitierenden Faktor
Einsatz adäquater Entwicklungsparadigmen
Que
llen:
H. S
chm
id: E
ntw
ickl
ung
und
Rea
lisie
rung
ein
er T
ests
trate
gie
mit
zuge
hörig
er T
estd
aten
bank
fü
r ein
Kfz
-Ele
ktro
nik-
Test
syst
em. S
tuttg
art,
1998
P. B
echb
erge
r: M
odel
lbas
ierte
Sof
twar
eent
wic
klun
g fü
r Ste
uerg
erät
e. A
TZ /
MTZ
, 200
0
05-12-20 - Seite/Page 3
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
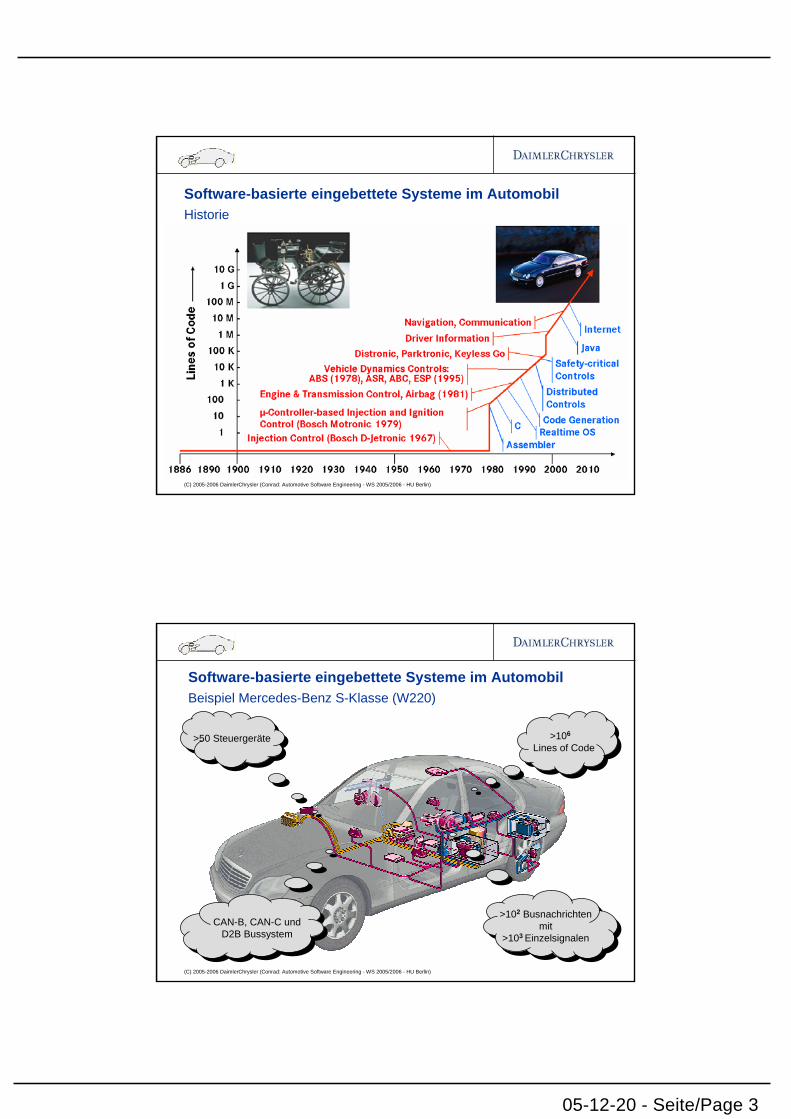
Software-basierte eingebettete Systeme im AutomobilHistorie
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
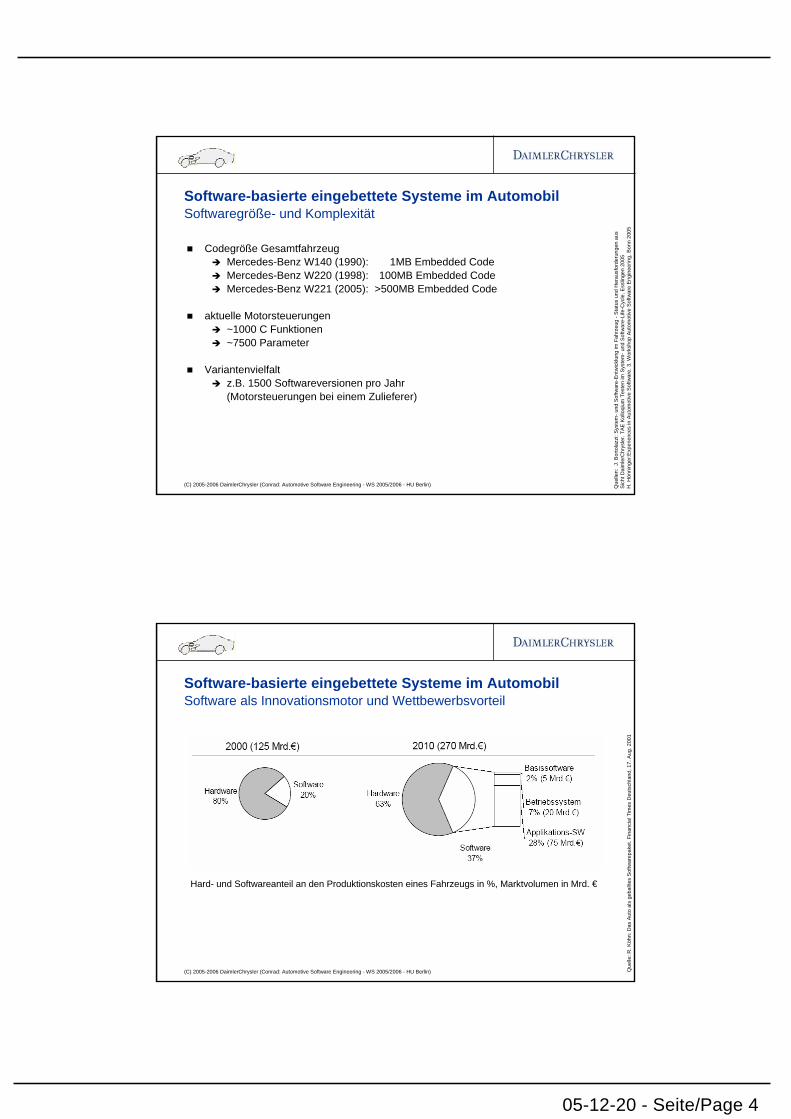
Software-basierte eingebettete Systeme im AutomobilBeispiel Mercedes-Benz S-Klasse (W220)
>106
Lines of Code>106
Lines of Code
>102 Busnachrichtenmit
>103 Einzelsignalen
>102 Busnachrichtenmit
>103 Einzelsignalen
>50 Steuergeräte>50 Steuergeräte
CAN-B, CAN-C undD2B Bussystem
CAN-B, CAN-C undD2B Bussystem
05-12-20 - Seite/Page 4
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Software-basierte eingebettete Systeme im AutomobilSoftwaregröße- und Komplexität
Codegröße GesamtfahrzeugMercedes-Benz W140 (1990): 1MB Embedded CodeMercedes-Benz W220 (1998): 100MB Embedded CodeMercedes-Benz W221 (2005): >500MB Embedded Code
aktuelle Motorsteuerungen~1000 C Funktionen~7500 Parameter
Variantenvielfaltz.B. 1500 Softwareversionen pro Jahr(Motorsteuerungen bei einem Zulieferer)
Que
llen:
J. B
orto
lazz
i: S
yste
m-u
nd S
oftw
are-
Ent
wic
klun
g im
Fah
rzeu
g -S
tatu
s un
d H
erau
sfor
deru
ngen
aus
S
icht
Dai
mle
rChr
ysle
r. TA
E K
ollo
qium
Test
en im
Sys
tem
-und
Sof
twar
e-Li
fe-C
ycle
, Ess
linge
n 20
05H
. Hön
ning
er:E
xper
ienc
esin
Aut
omot
ive
Sof
twar
e. 3
. Wor
ksho
p A
utom
otiv
e S
oftw
are
Eng
inee
ring,
Bon
n 20
05
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Software-basierte eingebettete Systeme im Automobil Software als Innovationsmotor und Wettbewerbsvorteil
Que
lle: R
. Köh
n: D
as A
uto
als
geba
lltes
Sof
twar
epak
et. F
inan
cial
Tim
es D
euts
chla
nd, 1
7. A
ug. 2
001
Hard- und Softwareanteil an den Produktionskosten eines Fahrzeugs in %, Marktvolumen in Mrd. €
05-12-20 - Seite/Page 5
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Software-basierte eingebettete Systeme im Automobil Hohe Garantie- und Kulanzkosten
Que
llen:
JD
Pow
er, M
cKin
sey
R.-G
. Her
rtwic
h: V
orle
sung
sunt
erla
gen
Info
rmat
ions
tech
nik
im K
fz. T
U B
erlin
, Som
mer
sem
este
r 200
5
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
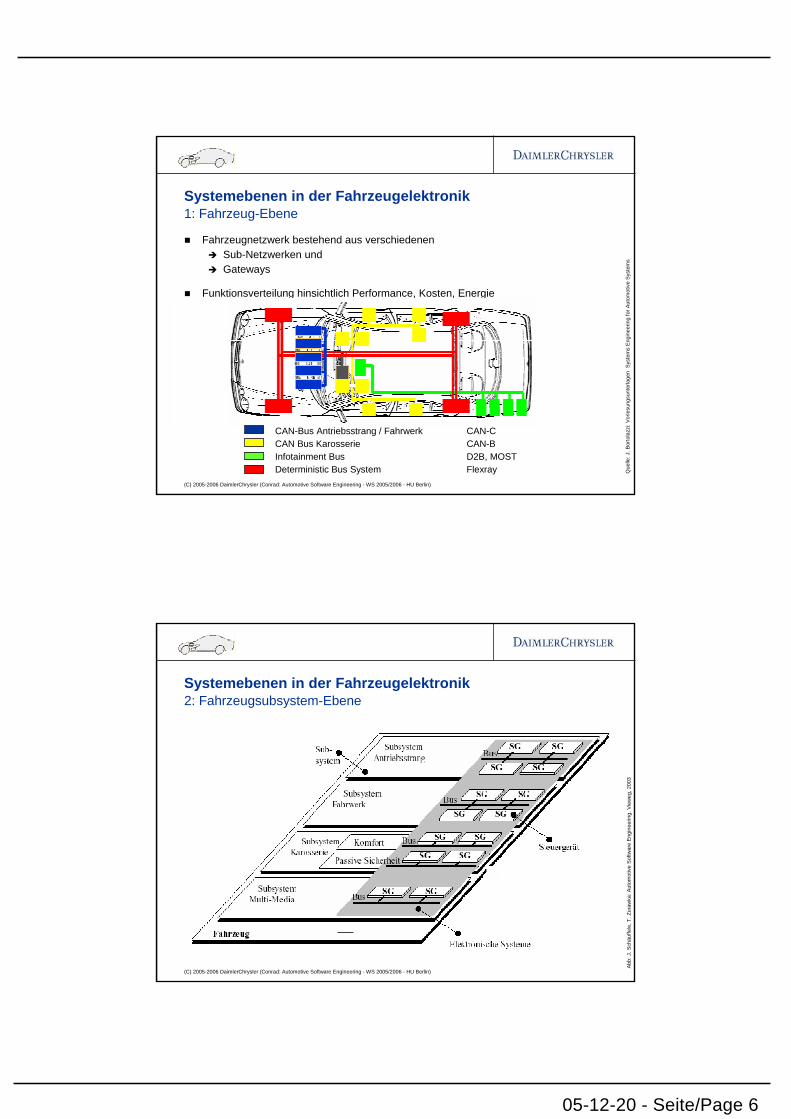
Systemebenen in der FahrzeugelektronikÜberblick
Abb
: J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring.
Vie
weg
, 200
3
5 verschiedene Betrachtungsebenen für elektronische Systeme im Kfz
05-12-20 - Seite/Page 6
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik1: Fahrzeug-Ebene
Fahrzeugnetzwerk bestehend aus verschiedenen Sub-Netzwerken und Gateways
Funktionsverteilung hinsichtlich Performance, Kosten, Energie
Que
lle: J
. Bor
tola
zzi:
Vor
lesu
ngsu
nter
lage
n S
yste
ms
Eng
inee
ring
forA
utom
otiv
e S
yste
ms
CAN-Bus Antriebsstrang / Fahrwerk CAN-CCAN Bus Karosserie CAN-BInfotainment Bus D2B, MOSTDeterministic Bus System Flexray
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik2: Fahrzeugsubsystem-Ebene
Abb
: J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring.
Vie
weg
, 200
3
05-12-20 - Seite/Page 7
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
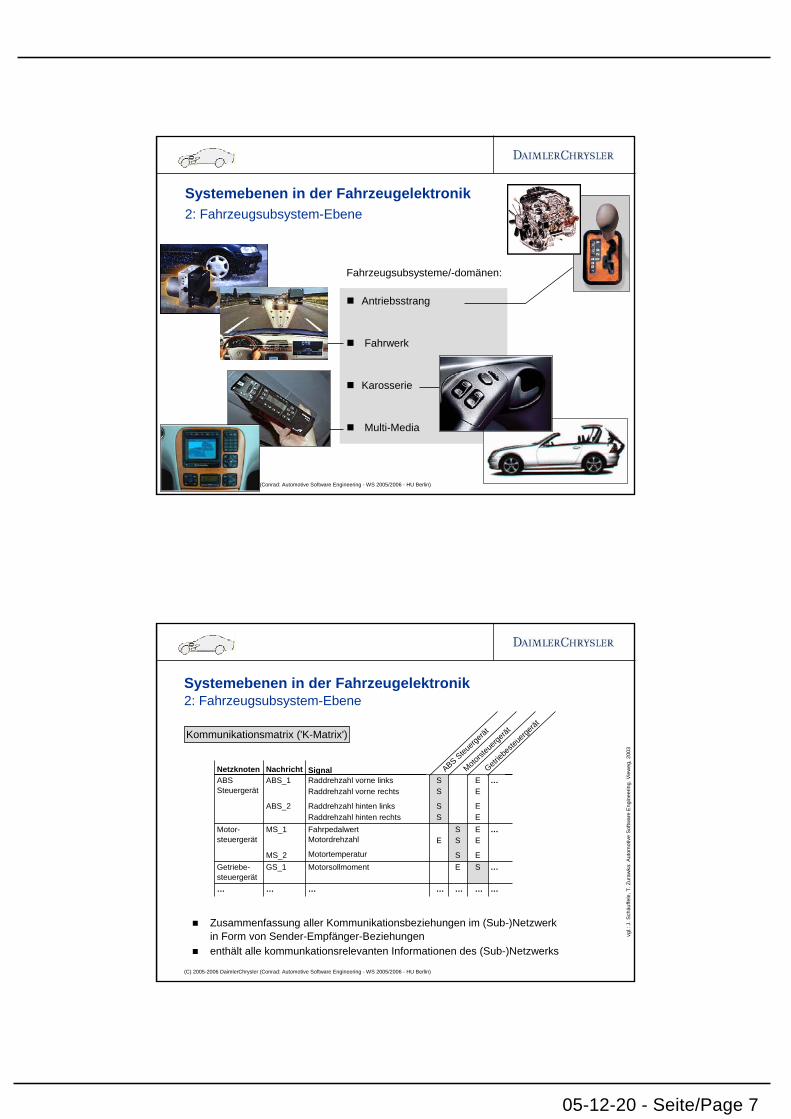
Systemebenen in der Fahrzeugelektronik2: Fahrzeugsubsystem-Ebene
Fahrzeugsubsysteme/-domänen:
Antriebsstrang
Fahrwerk
Karosserie
Multi-Media
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
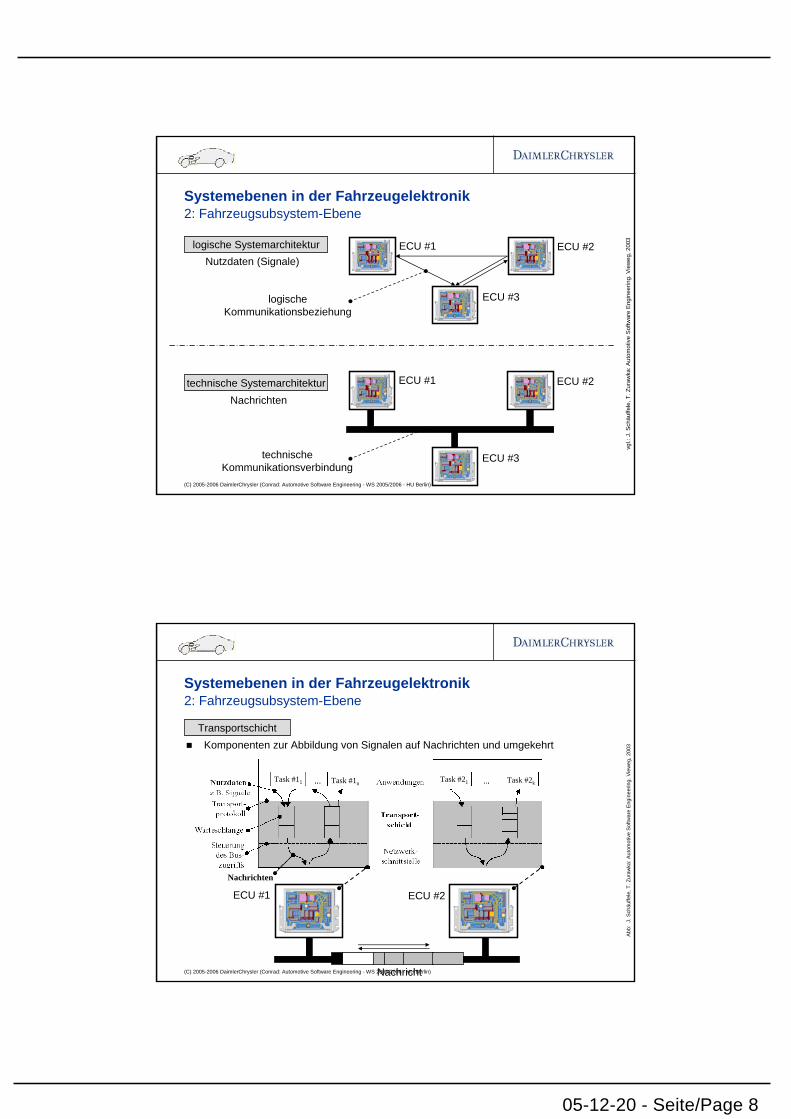
Systemebenen in der Fahrzeugelektronik2: Fahrzeugsubsystem-Ebene
Zusammenfassung aller Kommunikationsbeziehungen im (Sub-)Netzwerkin Form von Sender-Empfänger-Beziehungenenthält alle kommunkationsrelevanten Informationen des (Sub-)Netzwerks
…………………
…SEMotorsollmomentGS_1Getriebe-steuergerät
…EE
E
SS
S
EFahrpedalwertMotordrehzahl
Motortemperatur
MS_1
MS_2
Motor-steuergerät
…EE
EE
SS
SS
Raddrehzahl vorne linksRaddrehzahl vorne rechts
Raddrehzahl hinten linksRaddrehzahl hinten rechts
ABS_1
ABS_2
ABS Steuergerät
SignalNachrichtNetzknoten Getrieb
esteu
ergerä
t
Motorst
euerg
erät
ABS Steuerg
erät
vgl.:
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring.
Vie
weg
, 200
3
Kommunikationsmatrix ('K-Matrix')
05-12-20 - Seite/Page 8
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik2: Fahrzeugsubsystem-Ebene
logische Systemarchitektur ECU #1 ECU #2
ECU #3
technische Systemarchitektur ECU #1 ECU #2
ECU #3
vgl.:
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring.
Vie
weg
, 200
3
logische Kommunikationsbeziehung
technischeKommunikationsverbindung
Nutzdaten (Signale)
Nachrichten
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik2: Fahrzeugsubsystem-Ebene
Abb
: J.
Sch
äuffe
le, T
. Zur
awka
: Aut
omot
ive
Sof
twar
e E
ngin
eerin
g. V
iew
eg, 2
003
Transportschicht
ECU #1 ECU #2
Nachricht
Task #11 Task #1n Task #21 Task #2k
Nachrichten
Komponenten zur Abbildung von Signalen auf Nachrichten und umgekehrt

05-12-20 - Seite/Page 9
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik3: Steuergeräte-Ebene
(engl. electronic control units, ECUs)
eingebettete Systeme im KraftfahrzeugHardware-Software Einheiten, die verbunden über Sensoren, Aktuatoren und Nutzerschnittstellen technische und physikalische Vorgänge überwachen,steuern bzw. regeln
Fahrer
Sollwert-geber
SensorenAktuatoren
SteuerungRegelung
Überwachung
W
RU
W*
W*... Sollwerte des FahrersW ... Führungs-/SollgrößenR ... Mess-/RückführgrößenU ... Ausgangsgrößen
(Elektronische) Steuergeräte
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik3: Steuergeräte-Ebene
Fahrer
Sollwert-geber
Sensoren
AktuatorenSteuerungRegelung
Überwachung
W
R
U
W*
Foto
s : w
ww
.bba
-rem
an.c
om/ i
mag
es/e
cu.jp
g, B
osch
(Elektronisches) Steuergerät
U
W
R
Bosch LRR2 (Long Range Radar) Sensor & Control Unit
DDM (Driver Door Module)
05-12-20 - Seite/Page 10
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
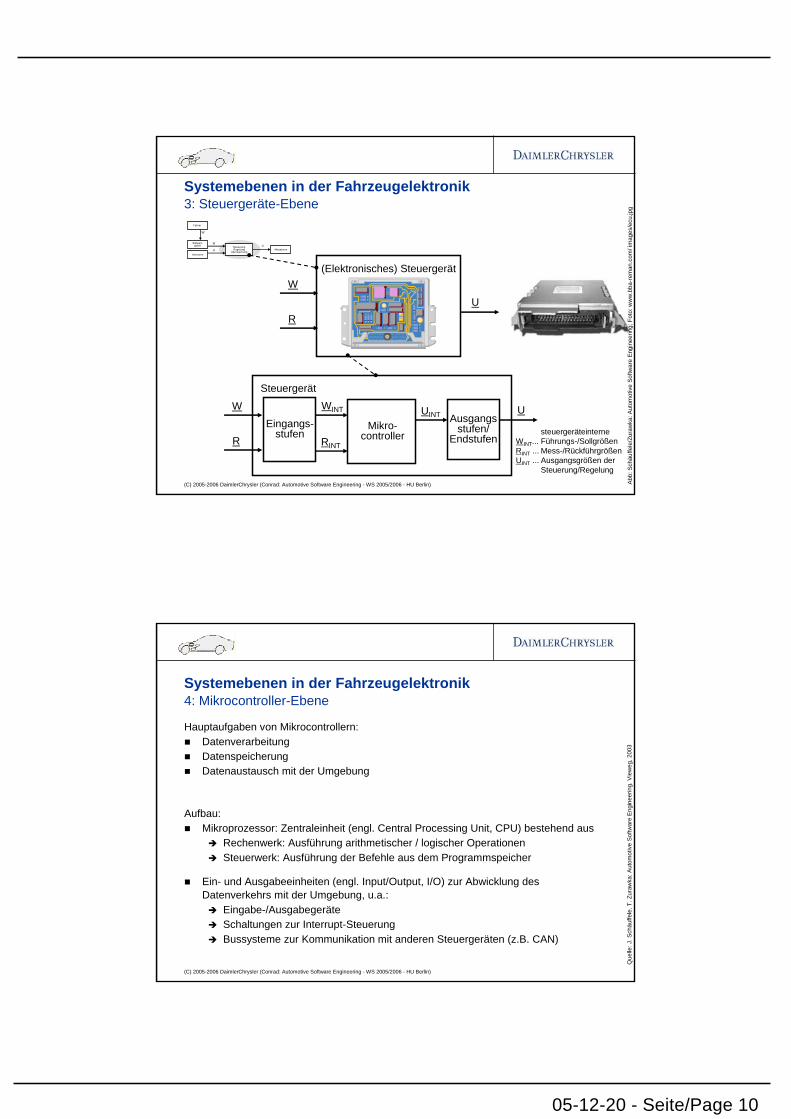
Systemebenen in der Fahrzeugelektronik3: Steuergeräte-Ebene
Abb
: Sch
äuffe
le/Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring;
Fot
o: w
ww
.bba
-rem
an.c
om/ i
mag
es/e
cu.jp
g
Steuergerät
Mikro-controller
Eingangs-stufen
Ausgangsstufen/
Endstufen
W
R
WINT UUINT
RINT
(Elektronisches) Steuergerät
U
W
R
steuergeräteinterneWINT... Führungs-/SollgrößenRINT ... Mess-/RückführgrößenUINT ... Ausgangsgrößen der
Steuerung/Regelung
Fahrer
Sollwert-geber
Sensoren
AktuatorenSteuerungRegelung
Überwachung
W
R
U
W*
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik4: Mikrocontroller-Ebene
Hauptaufgaben von Mikrocontrollern:DatenverarbeitungDatenspeicherungDatenaustausch mit der Umgebung
Aufbau:Mikroprozessor: Zentraleinheit (engl. Central Processing Unit, CPU) bestehend aus
Rechenwerk: Ausführung arithmetischer / logischer OperationenSteuerwerk: Ausführung der Befehle aus dem Programmspeicher
Ein- und Ausgabeeinheiten (engl. Input/Output, I/O) zur Abwicklung desDatenverkehrs mit der Umgebung, u.a.:
Eingabe-/AusgabegeräteSchaltungen zur Interrupt-SteuerungBussysteme zur Kommunikation mit anderen Steuergeräten (z.B. CAN)
Que
lle: J
. Sch
äuffe
le, T
. Zur
awka
: Aut
omot
ive
Softw
are
Eng
inee
ring.
Vie
weg
, 200
3
05-12-20 - Seite/Page 11
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
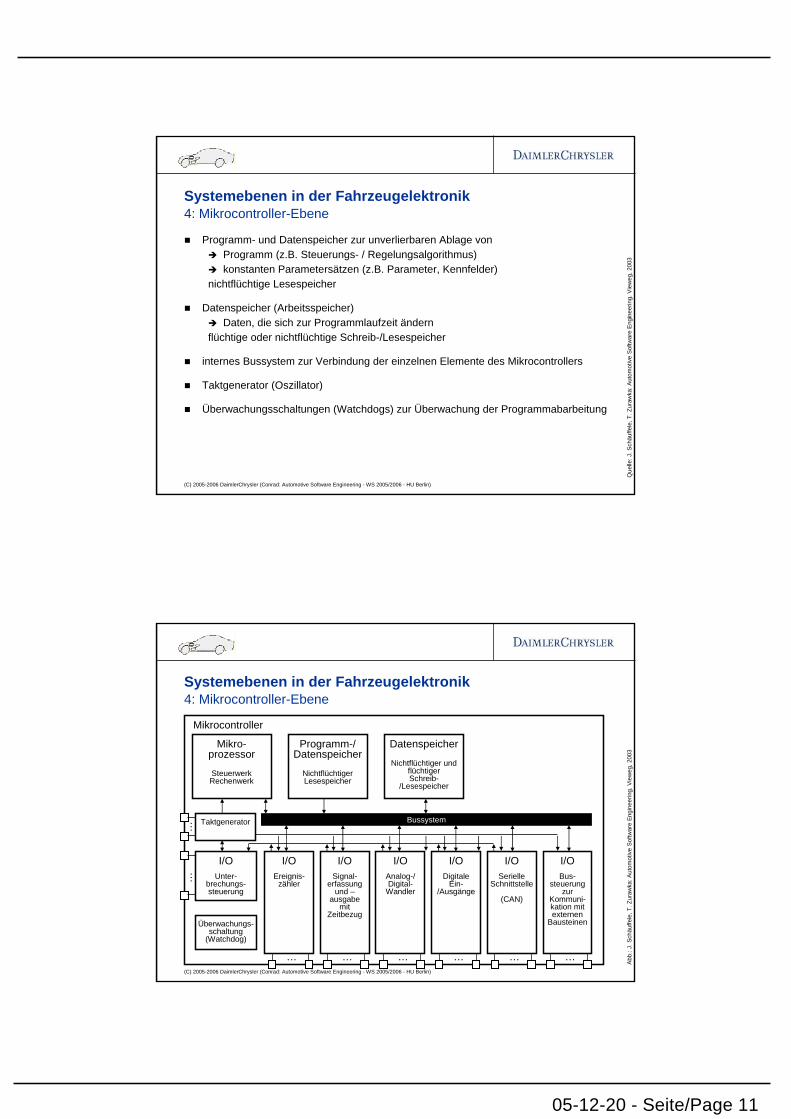
Systemebenen in der Fahrzeugelektronik4: Mikrocontroller-Ebene
Programm- und Datenspeicher zur unverlierbaren Ablage vonProgramm (z.B. Steuerungs- / Regelungsalgorithmus)konstanten Parametersätzen (z.B. Parameter, Kennfelder)
nichtflüchtige Lesespeicher
Datenspeicher (Arbeitsspeicher) Daten, die sich zur Programmlaufzeit ändern
flüchtige oder nichtflüchtige Schreib-/Lesespeicher
internes Bussystem zur Verbindung der einzelnen Elemente des Mikrocontrollers
Taktgenerator (Oszillator)
Überwachungsschaltungen (Watchdogs) zur Überwachung der Programmabarbeitung
Que
lle: J
. Sch
äuffe
le, T
. Zur
awka
: Aut
omot
ive
Softw
are
Eng
inee
ring.
Vie
weg
, 200
3
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Mikrocontroller
Systemebenen in der Fahrzeugelektronik4: Mikrocontroller-Ebene
Mikro-prozessor
SteuerwerkRechenwerk
Programm-/Datenspeicher
NichtflüchtigerLesespeicher
Datenspeicher
Nichtflüchtiger und flüchtigerSchreib-
/Lesespeicher
Taktgenerator Bussystem
I/OUnter-
brechungs-steuerung
I/OEreignis-
zähler
……
Überwachungs-schaltung
(Watchdog)
…
I/OSignal-
erfassungund –
ausgabemit
Zeitbezug
…
I/OAnalog-/Digital-
Wandler
…
I/ODigitale
Ein-/Ausgänge
…
I/OSerielle
Schnittstelle
(CAN)
…
I/OBus-
steuerungzur
Kommuni-kation mitexternen
Bausteinen
…
Abb
.: J.
Sch
äuffe
le, T
. Zur
awka
: Aut
omot
ive
Sof
twar
e En
gine
erin
g. V
iew
eg, 2
003
05-12-20 - Seite/Page 12
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
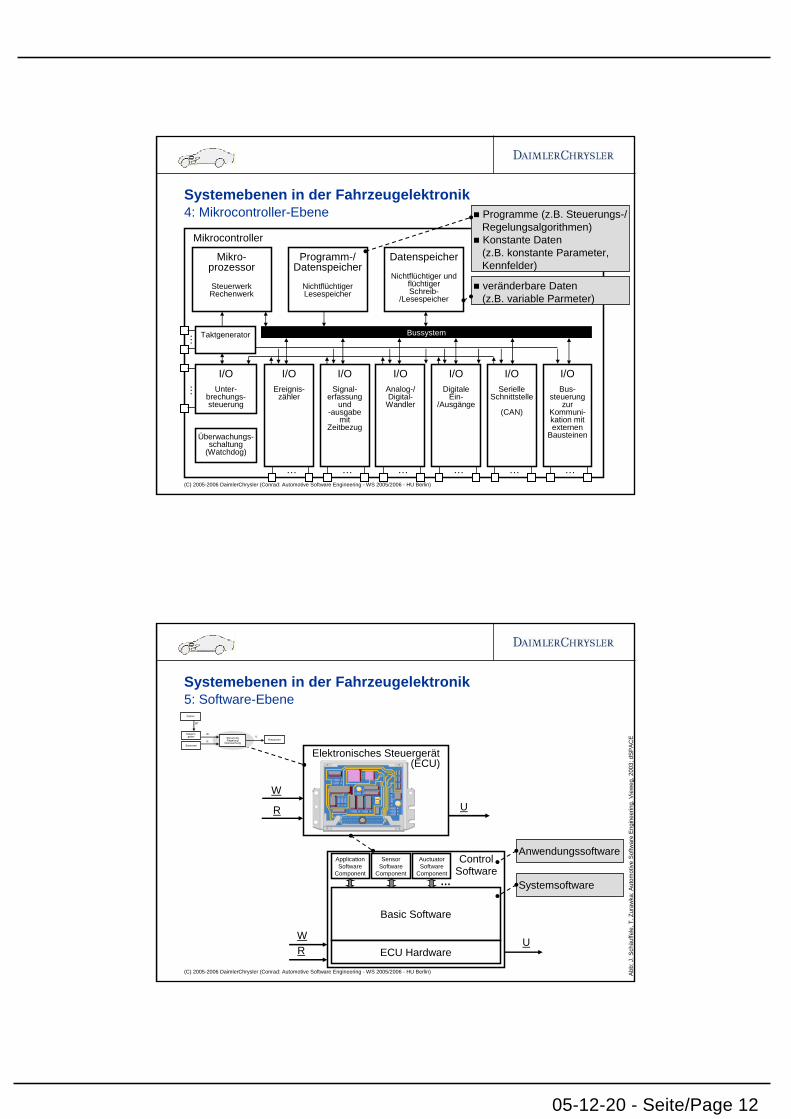
Mikrocontroller
Systemebenen in der Fahrzeugelektronik4: Mikrocontroller-Ebene
Mikro-prozessor
SteuerwerkRechenwerk
Programm-/Datenspeicher
NichtflüchtigerLesespeicher
Datenspeicher
Nichtflüchtiger und flüchtigerSchreib-
/Lesespeicher
Taktgenerator Bussystem
I/OUnter-
brechungs-steuerung
I/OEreignis-
zähler
……
Überwachungs-schaltung
(Watchdog)
…
I/OSignal-
erfassungund
-ausgabemit
Zeitbezug
…
I/OAnalog-/Digital-
Wandler
…
I/ODigitale
Ein-/Ausgänge
…
I/OSerielle
Schnittstelle
(CAN)
…
I/OBus-
steuerungzur
Kommuni-kation mitexternen
Bausteinen
…
Programme (z.B. Steuerungs-/Regelungsalgorithmen)Konstante Daten (z.B. konstante Parameter, Kennfelder)
veränderbare Daten (z.B. variable Parmeter)
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
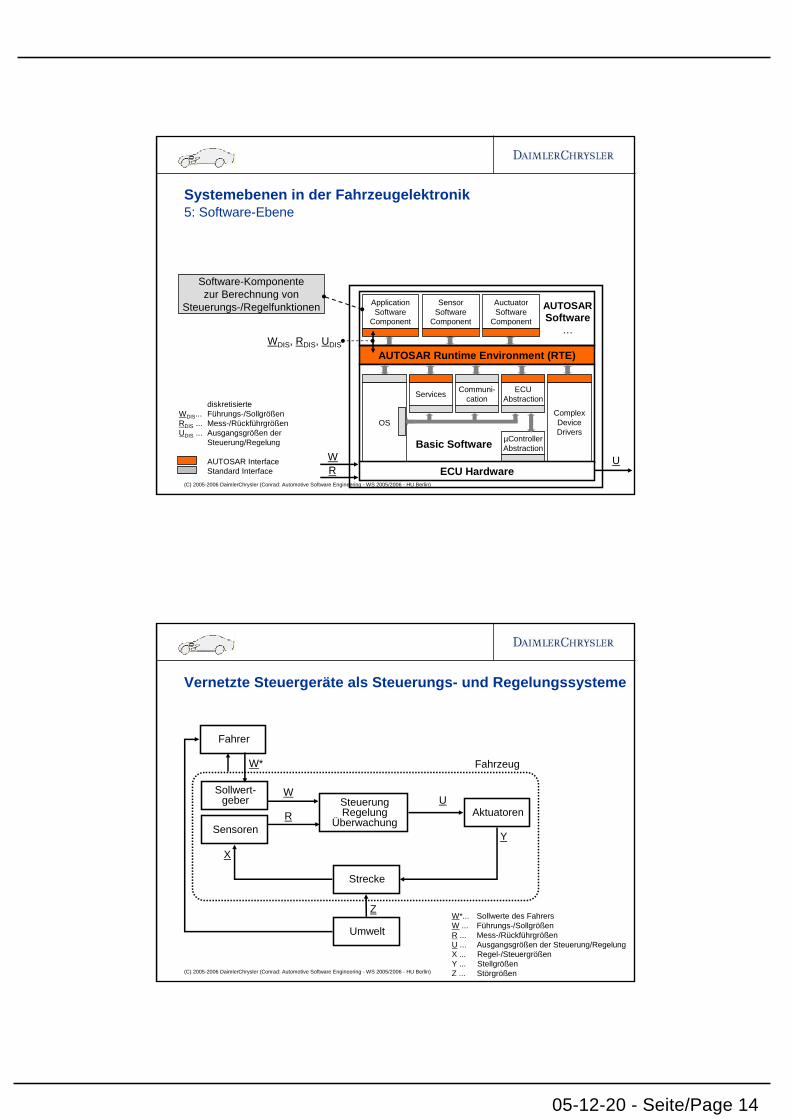
Systemebenen in der Fahrzeugelektronik5: Software-Ebene
Elektronisches Steuergerät (ECU)
UW
R
Basic Software
ApplicationSoftware
Component
AuctuatorSoftware
Component
SensorSoftware
Component
ControlSoftware
ECU HardwareWR
U
… Systemsoftware
Anwendungssoftware
Abb
: J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Engi
neer
ing.
Vie
weg
, 200
3; d
SP
AC
E
Fahrer
Sollwert-geber
Sensoren
AktuatorenSteuerungRegelung
Überwachung
W
R
U
W*
05-12-20 - Seite/Page 13
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Basic Software
ApplicationSoftware
Component
AuctuatorSoftware
Component
SensorSoftware
Component
ControlSoftware
ECU HardwareWR
U
…
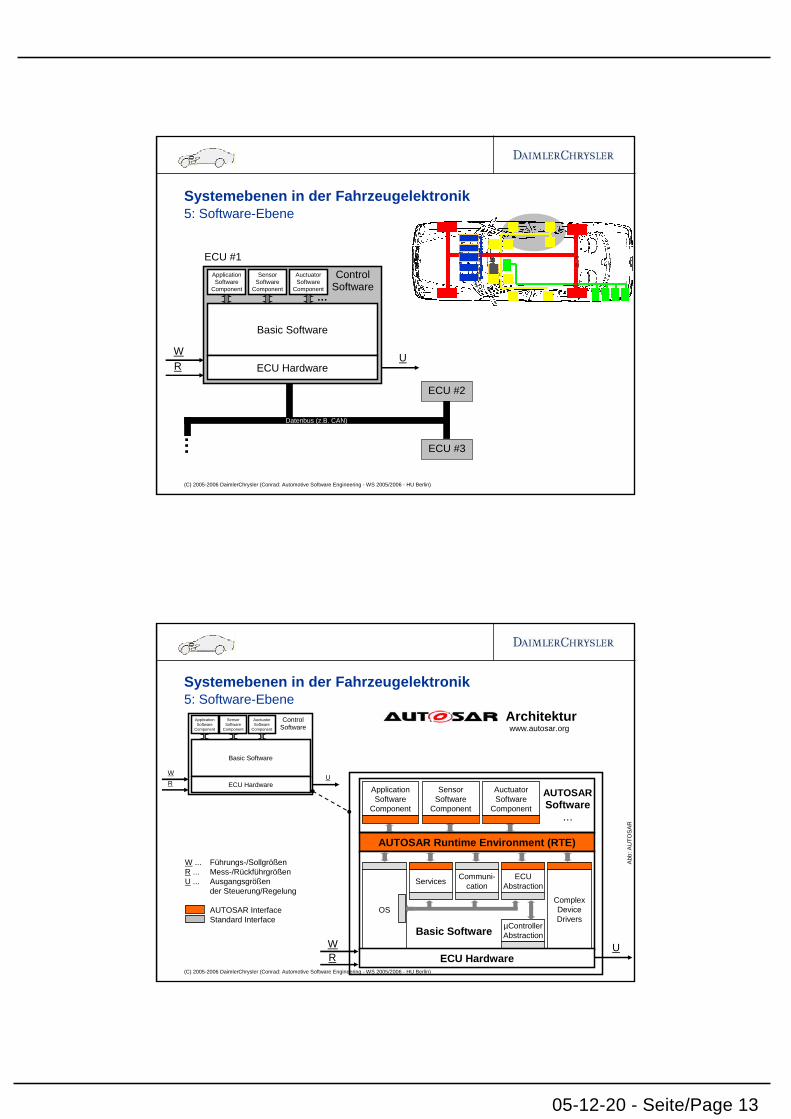
ECU #1
ECU #2
Systemebenen in der Fahrzeugelektronik5: Software-Ebene
ECU #3…
Datenbus (z.B. CAN)
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik5: Software-Ebene
Abb
: AU
TOS
AR
Basic Software
ApplicationSoftware
Component
AuctuatorSoftware
Component
SensorSoftware
Component
ControlSoftware
ECU Hardware
WR
U
AUTOSAR Runtime Environment (RTE)
ApplicationSoftware
Component
AuctuatorSoftware
Component
SensorSoftware
Component
AUTOSARSoftware
…
Services Communi-cation
OSComplexDeviceDrivers
ECUAbstraction
µControllerAbstractionBasic Software
ECU HardwareWR
U
Architektur
W ... Führungs-/SollgrößenR ... Mess-/RückführgrößenU ... Ausgangsgrößen
der Steuerung/Regelung
AUTOSAR InterfaceStandard Interface
www.autosar.org
05-12-20 - Seite/Page 14
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Systemebenen in der Fahrzeugelektronik5: Software-Ebene
AUTOSAR Runtime Environment (RTE)
ApplicationSoftware
Component
AuctuatorSoftware
Component
SensorSoftware
Component
AUTOSARSoftware
…
Services Communi-cation
OSComplexDeviceDrivers
ECUAbstraction
µControllerAbstractionBasic Software
ECU HardwareWR
U
diskretisierteWDIS... Führungs-/SollgrößenRDIS ... Mess-/RückführgrößenUDIS ... Ausgangsgrößen der
Steuerung/Regelung
AUTOSAR InterfaceStandard Interface
WDIS, RDIS, UDIS
Software-Komponentezur Berechnung von
Steuerungs-/Regelfunktionen
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Vernetzte Steuergeräte als Steuerungs- und Regelungssysteme
Fahrzeug
Fahrer
Sollwert-geber
Sensoren
Strecke
Umwelt
W
RU
Z
Y
X
W*... Sollwerte des FahrersW ... Führungs-/SollgrößenR ... Mess-/RückführgrößenU ... Ausgangsgrößen der Steuerung/RegelungX ... Regel-/SteuergrößenY ... StellgrößenZ ... Störgrößen
AktuatorenSteuerungRegelung
Überwachung
W*
05-12-20 - Seite/Page 15
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
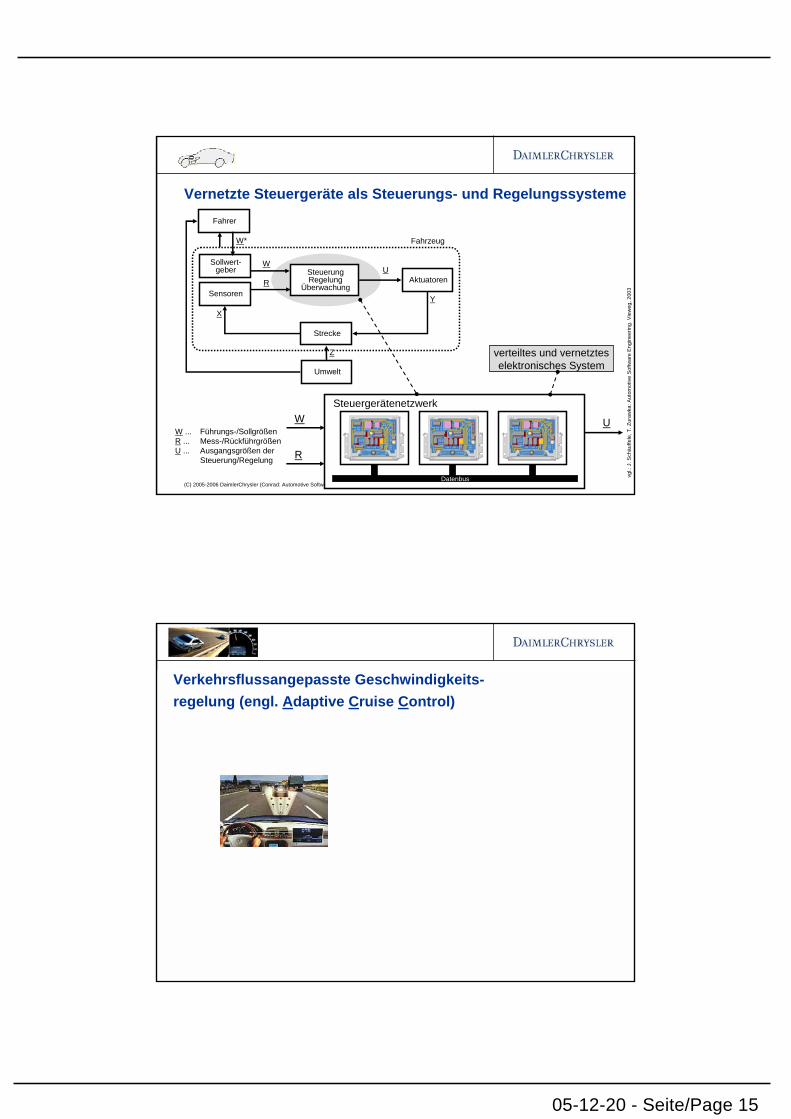
Steuergerätenetzwerk
Vernetzte Steuergeräte als Steuerungs- und Regelungssysteme
W
R
U
Datenbus
Fahrzeug
Fahrer
Sollwert-geber
Sensoren
Strecke
Umwelt
W
RU
Y
X
AktuatorenSteuerungRegelung
Überwachung
W*
Z
W ... Führungs-/SollgrößenR ... Mess-/RückführgrößenU ... Ausgangsgrößen der
Steuerung/Regelung
verteiltes und vernetzteselektronisches System
vgl.:
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e S
oftw
are
Eng
inee
ring.
Vie
weg
, 200
3
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Fahrzeugsubsysteme/-domänen:
Antriebsstrang
Fahrwerk
Karosserie
Multi-Media
Verkehrsflussangepasste Geschwindigkeits-regelung (engl. Adaptive Cruise Control)
05-12-20 - Seite/Page 16
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
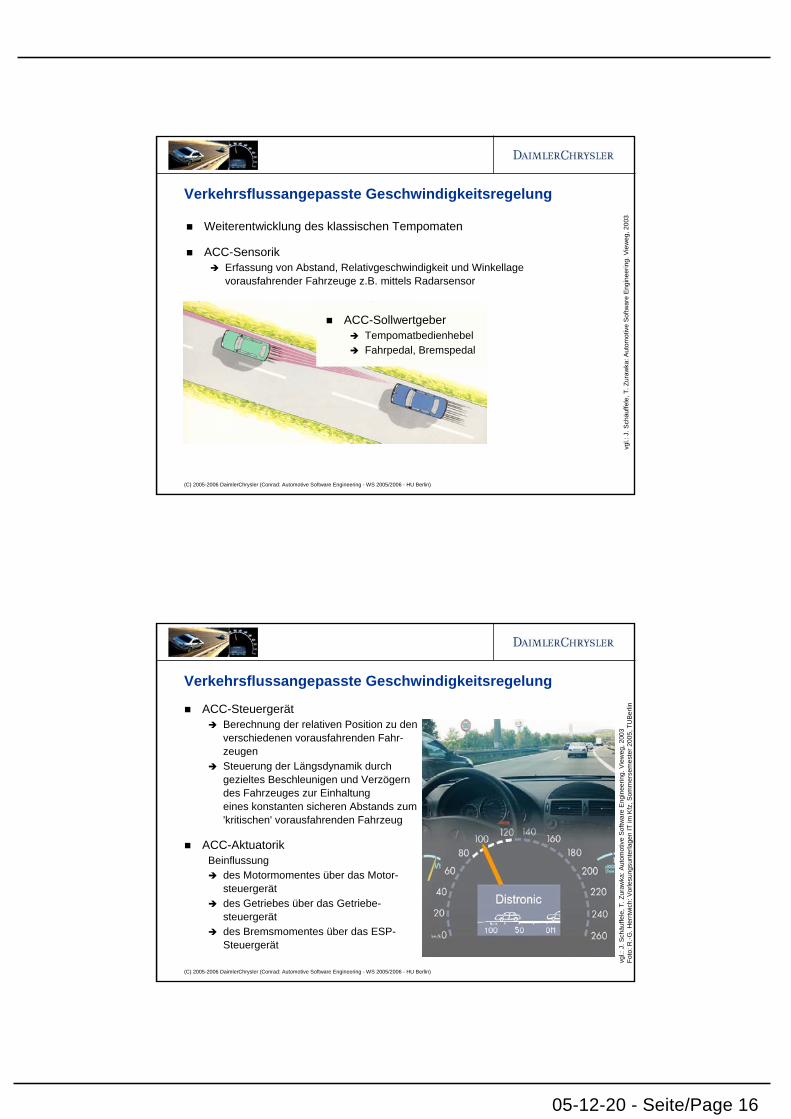
Verkehrsflussangepasste Geschwindigkeitsregelung
vgl.:
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e So
ftwar
e En
gine
erin
g. V
iew
eg, 2
003
Weiterentwicklung des klassischen Tempomaten
ACC-SensorikErfassung von Abstand, Relativgeschwindigkeit und Winkellage vorausfahrender Fahrzeuge z.B. mittels Radarsensor
ACC-SollwertgeberTempomatbedienhebelFahrpedal, Bremspedal
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Verkehrsflussangepasste Geschwindigkeitsregelung
vgl.:
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e So
ftwar
e En
gine
erin
g. V
iew
eg, 2
003
Fo
to: R
.-G. H
errtw
ich:
Vor
lesu
ngsu
nter
lage
n IT
im K
fz, S
omm
erse
mes
ter 2
005,
TU
Berli
nACC-SteuergerätBerechnung der relativen Position zu den verschiedenen vorausfahrenden Fahr-zeugen Steuerung der Längsdynamik durch gezieltes Beschleunigen und Verzögern des Fahrzeuges zur Einhaltung eines konstanten sicheren Abstands zum 'kritischen' vorausfahrenden Fahrzeug
ACC-AktuatorikBeinflussung
des Motormomentes über das Motor-steuergerätdes Getriebes über das Getriebe-steuergerätdes Bremsmomentes über das ESP-Steuergerät
05-12-20 - Seite/Page 17
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
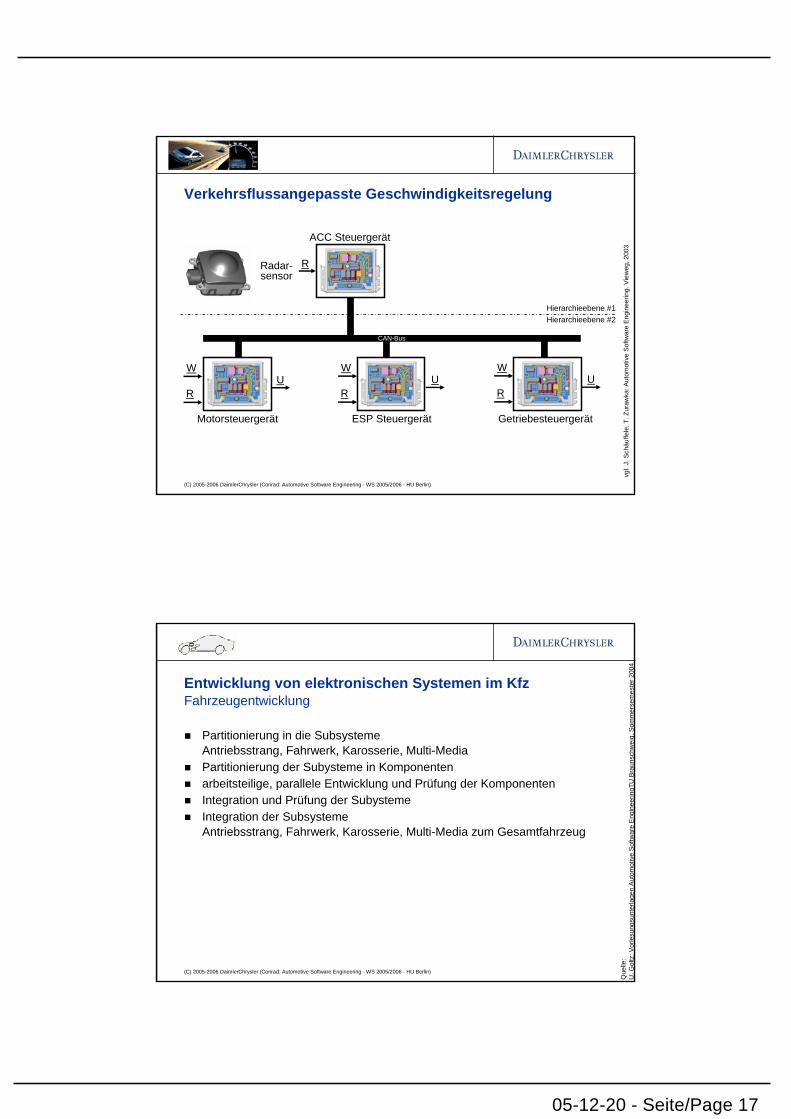
Verkehrsflussangepasste Geschwindigkeitsregelung
Radar-sensor
CAN-Bus
Hierarchieebene #1Hierarchieebene #2
vgl.
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e So
ftwar
e En
gine
erin
g. V
iew
eg, 2
003
ACC Steuergerät
Motorsteuergerät ESP Steuergerät Getriebesteuergerät
W
RU
R
W
RU
W
RU
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Entwicklung von elektronischen Systemen im KfzFahrzeugentwicklung
Partitionierung in die Subsysteme Antriebsstrang, Fahrwerk, Karosserie, Multi-MediaPartitionierung der Subysteme in Komponentenarbeitsteilige, parallele Entwicklung und Prüfung der KomponentenIntegration und Prüfung der SubystemeIntegration der SubsystemeAntriebsstrang, Fahrwerk, Karosserie, Multi-Media zum Gesamtfahrzeug
Que
lle:
U. G
oltz
: Vor
lesu
ngsu
nter
lage
n Au
tom
otiv
e So
ftwar
e E
ngin
eerin
gTU
Brau
nsch
wei
g, S
omm
erse
mes
ter 2
004
05-12-20 - Seite/Page 18
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
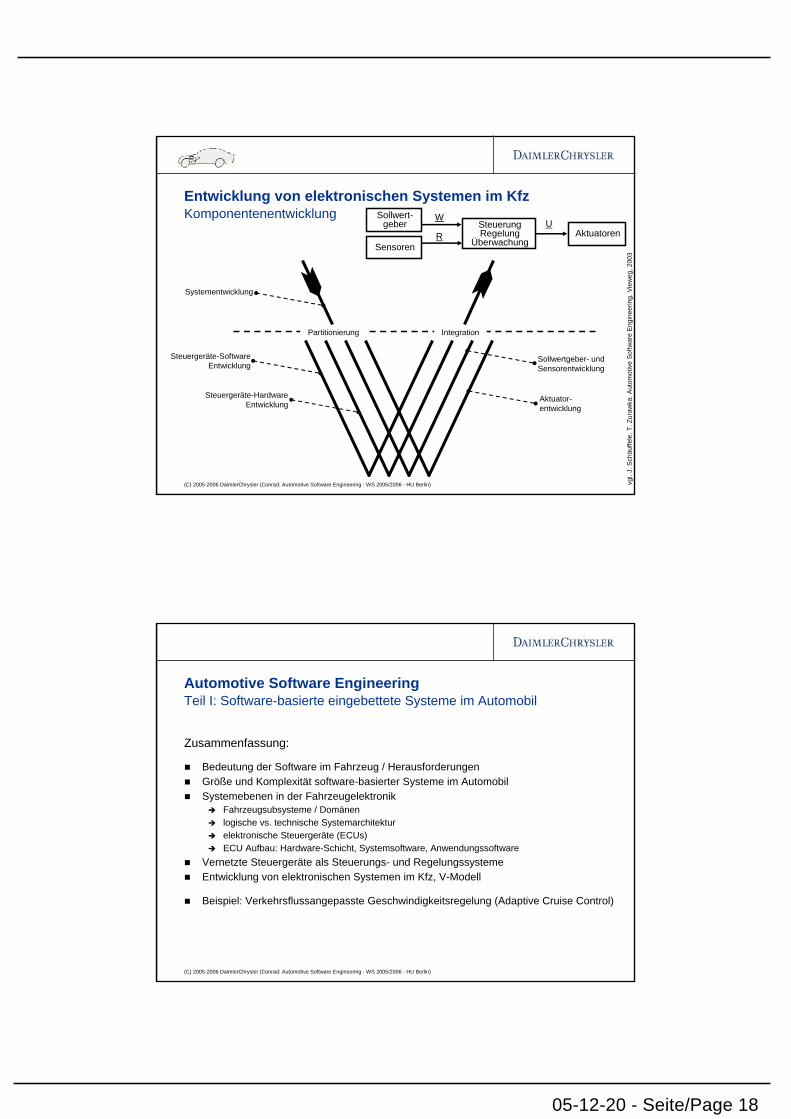
Entwicklung von elektronischen Systemen im KfzKomponentenentwicklung
Partitionierung Integration
Systementwicklung
Steuergeräte-SoftwareEntwicklung
Steuergeräte-HardwareEntwicklung
Sollwertgeber- undSensorentwicklung
Aktuator-entwicklung
Sollwert-geber
SensorenAktuatoren
SteuerungRegelung
Überwachung
W
RU
vgl.
J. S
chäu
ffele
, T. Z
uraw
ka: A
utom
otiv
e So
ftwar
e En
gine
erin
g. V
iew
eg, 2
003
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Automotive Software EngineeringTeil I: Software-basierte eingebettete Systeme im Automobil
Zusammenfassung:
Bedeutung der Software im Fahrzeug / HerausforderungenGröße und Komplexität software-basierter Systeme im AutomobilSystemebenen in der Fahrzeugelektronik
Fahrzeugsubsysteme / Domänenlogische vs. technische Systemarchitekturelektronische Steuergeräte (ECUs)ECU Aufbau: Hardware-Schicht, Systemsoftware, Anwendungssoftware
Vernetzte Steuergeräte als Steuerungs- und RegelungssystemeEntwicklung von elektronischen Systemen im Kfz, V-Modell
Beispiel: Verkehrsflussangepasste Geschwindigkeitsregelung (Adaptive Cruise Control)

05-12-20 - Seite/Page 19
(C) 2005-2006 DaimlerChrysler (Conrad: Automotive Software Engineering - WS 2005/2006 - HU Berlin)
Automotive Software EngineeringTeil I: Software-basierte eingebettete Systeme im AutomobilLiteratur:
J. Schäuffele, T. Zurawka: Automotive Software Engineering. Vieweg Verlag, 2003
G. Walliser et al: Elektronik im Kraftfahrzeugwesen –Steuerungs-, Regelungs- und Kommunikationssysteme. expert Verlag, 2004
Elektronik im Kraftfahrzeug. Tagungsbände der gleichnamigen Konferenzreihe, VDI Verlag