Embed Size (px)
Citation preview
Topea Alexandru
Informatica An3 Gr2
Cuprins
Industria.........................................................................................................................................2Scurt Istoric:..............................................................................................................................2
DCS (Distributed Control Sistem).............................................................................................3Arhitectura unui sistem DCS:...................................................................................................4
SCADA (Supervisory Control And Data Acquisition)............................................................6Arhitectura unui sistem SCADA...............................................................................................7Protocoale SCADA:..................................................................................................................9Configuratia sistemului unui baraj de acumulare..................................................................10
Sisteme Embedded....................................................................................................................11Arhitectura unui Sistem Embedded........................................................................................13
Microcontrolere.........................................................................................................................13
Sisteme de achizitie de date......................................................................................................15Structura unui Sistem de Achizitii de Date.............................................................................16Pasii urmati de un sistem de achizitie de date.........................................................................17
Circuite FPGA (Field Programmable Gate Array)...............................................................17Structura tipica a unui bloc logic:...........................................................................................18
Bibliografie.................................................................................................................................21
1
Industria
Pentru a intelege ce inseamna automatizarea unui proces industrial trebuie sa avem
cunostiinta despre ce reprezinta industria iar apoi despre automatizarea procesului industrial.
Industria este o ramura a productiei de bunuri, materiale unde se desfasoara un proces
amplu de exploatare a bunurilor materiale si de prelucrare a acestora din diverse domenii
(cercetare,militar,mediacal,transport,etc).
Un proces industrial reprezinta un proces prin care mai multe persoana interactioneaza intre ele
ajutandu-se de diverse ustensile si aparate pentru a crea bunuri materiale. La ora actuala orice
sistem industrial este conceput cu un sistem automat de conducere. O data cu evolutia
oamenilor si a tehnologiei mai ales in procesele tehnologice sistemele automate pot fi
controlate in timp real online, totul fiind posibil datorita sistemelor inteligente adaptive. Fiindca
totul se desfasoara in timp real raspunsul sistemului este foarte esential si trebuie sa fie
instantaneu sau cu un raspuns cu delay foarte mic.
Scurt Istoric:
Sistemele automate putem spune ca si-au avut originea undeva in vrema grecilor antici
si a egiptenilor intinzandu-se pana in timpurile noastre. Aceasta evolutie a sistemelor automate
se poate impartii in 4 perioade:
- Civilizatia greaca si cea egipteana eraa preocupata de urmarirea cu cea mai mare acuratete a
timpului, acest lucru realizandu-se intre anii 300 I.Hr – 1200 D.Hr. Primul exemplu de sistem
automat a fost descoperit in anul 140 I.Hr egiptenii antici au folosit un vas de forma unei galeti
umplut cu apa pentru a crea un ceas cu apa unde o gaura la baza vasului controla curgerea apei
pentru a forma un indicator de timp exact.
- Revolutia industriala din Europa se spune ca a inceput undeva pe la sfarsitul anilor 1800 insa
cercetarile au afirmat ca aceasta revolutie isi are radacinile inca din anii 1600. In jurul anului
1850, cand navele maritimi au devenit tot mai mari si era greu sa intorci carma si sa virezi
vasul datorita greutatii si marimii ambarcatiunii Jean Josep a folosit pentru prima oara numele
de „servo moteuro” cand a inventat un sistem care controla carma folosind un sistem
specializat.
- Inceputul comunicarii in masa si a celor doua razboaie mondiale au reprezentat inca o
perioada importanta a dezvoltarii sistemelor automate intre anii 1910-1945. Nevoia de sisteme
de control a crescut mult o data cu inventia curentului electric. De acolo toate au evolut mult
2
mai rapid si mai usor cautandu-se a se gasit sisteme tot mai complexe pentru a controla diferite
uzine care se tot dezvolta crescand mult si nemaiputand fii controlate doar de oameni.
- Ultima perioada care se continua cu zilele noastre o reprezinta intrarea omenii in era spatiala
dupa anii 60’.
Parte a sistemelor automate de productie sunt si sistemele DCS.
DCS (Distributed Control Sistem)
Un sistem DCS (distributed control sistem) reprezinta o partea a unui sistem de
fabricatie care monitorizeaza si controleaza echipamentele de control , iar intregul sistem este
conectat in retea pentru a fi monitorizat si controlat. Acest sistem este conectat in diverse
locatii strategice de control pentru a colecta date sau de a transmite comenzi via interfata de
comanda umana (consola de comanda).
Intstrumentatia sistemelor DCS se clasifica in 2 grupe:
- primare: senzori si elementele finale de control localizate pe sau aproape de procese
- secundare: echipamente folosite pentru a indica alarme, control si inregistrare localizate in
cmera de control.
In procesele continue controlul inseamna ca valorile sa fie cat mai aproape de tina
dorita, iar intrun sistem cu procese discontinue inseamna ca valorile sa fie egale cu cele
necesare si ca secventa de comenzi sa fie respectata. Instalarea unui sistem DCS in principiu
scade costul de instalare deoarece permite modulelor de control sa fie interconectate si grupate,
costul ingrijiri este scazut, creste fiabilitatea sistemului si face configurarea sistemului sa fie
mult mai usoara. Deoarece sistemul DCS depinde de computere el trebuie sa fie permanent
mentinut (fiind bazat pe software) si este o continua investitie si dezvoltare fiind asemenea unei
retele de calculatoare. Exact cum o spune si numele DCS (distributed control sistem) este un
sistem cu functii distribuite si nu centralizate. Un sistem DCS este format din o serie de module
bazape pe microprocesoare care functioneaza impreuna pentru a monitoriza operatiile dintr-o
uzina. Modulele sunt distribuite in mod geografic.
Sistemul DCS este conectat la principalele elemente de control cum ar fi: masurarea
temperaturii, presiunii,debitului,gazelor,greutate,valve,motoare,etc. De la aceste elemente
primeste semnale electrice (4-20mA,1-5V DC,24V AC si 120 V AC) pe care le converteste
(digital) fiind folosite in cele din urma de catre computer pentru a lua masurile necesare.
3
Pentru sporirea performantelor DCS si reducerii costurilor multe imbunatatiri au fost
aduse sistemului din zona industriei de calculatoare:
- monitoare lcd sau crt de inalta rezolutie
- o retea mai buna intre zonele de control
- memorii mai mari (GB)
- algoritmi mai puternici
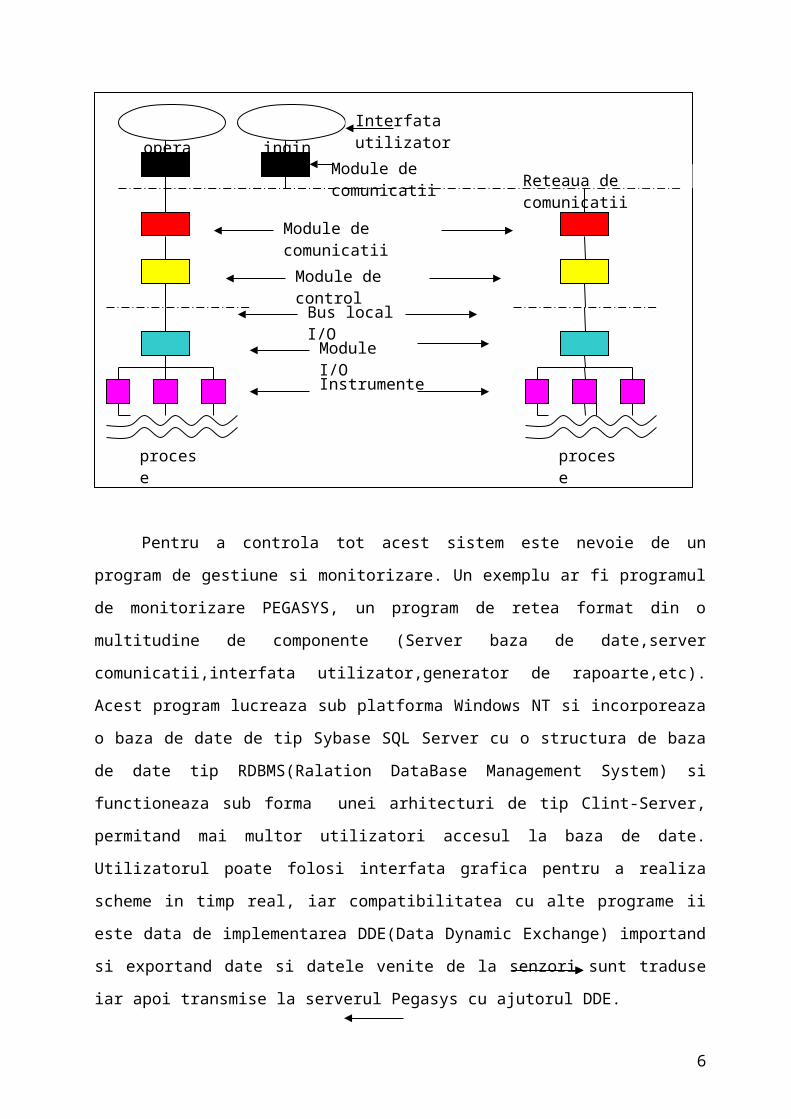
Arhitectura unui sistem DCS:
Pentru a controla tot acest sistem este nevoie de un program de gestiune si monitorizare.
Un exemplu ar fi programul de monitorizare PEGASYS, un program de retea format din o
multitudine de componente (Server baza de date,server comunicatii,interfata
utilizator,generator de rapoarte,etc). Acest program lucreaza sub platforma Windows NT si
incorporeaza o baza de date de tip Sybase SQL Server cu o structura de baza de date tip
RDBMS(Ralation DataBase Management System) si functioneaza sub forma unei arhitecturi
de tip Clint-Server, permitand mai multor utilizatori accesul la baza de date. Utilizatorul poate
folosi interfata grafica pentru a realiza scheme in timp real, iar compatibilitatea cu alte
programe ii este data de implementarea DDE(Data Dynamic Exchange) importand si exportand
operator
inginer
Reteaua de comunicatii
Interfata utilizator
Module de comunicatii
procese procese
Instrumente
Module I/O
Bus local I/O
Module de control
Module de comunicatii
4
date si datele venite de la senzori sunt traduse iar apoi transmise la serverul Pegasys cu ajutorul
DDE.
Desigur putem spune ca toate greutatile cad pe senzorii inteligenti care stau in „varful”
sistemelor DCS. Senzorii inteligenti au fost pentru prima data folositi la inceputul anilor 1980
deoarece aveau unele caracteristici speciale si utile:
-element senzorial primar
-capacitate de calcul (microcontroler,microprocesor)
-interfata
-precizie ridicata
-functionalitate(autocalibrare,autostare)
-economie(fiabilitate crescuta,timp redus de calibrare)
Un senzor inteligent este un „supersistem” alcatuit din mai multe subsisteme cu functii
clar precizate, printre care putand mentionandu-se:
-o multitudine de elemente senzoriale
-conditionari asociate
-sistem de calcul intern
-interfata pentru comunicatii
Senzorii inteligenti au o legatura directa cu automatizarea sistemului industrial prin asa
numita „autosupraveghere”:
-depistarea defectiunilor sau a starilor care favorizeaza defectarea
-detectarea eventualelor perturbatii cu scopul indepartarii lor
-cand un sistem este defect el poate fi indepartat in cazul in care se asigura redundanta
-gestionarea modului de functionarea (o evidenta a tuturor datelor culese din sistem).
Senzorii inteligenti sunt clasificati astfel:
1) Senzori de locatie si proximitate acustici
-senzor de forta/moment/presare
-senzor ultrasonic de proximitate
-motor de actionare
5
2) Senzori de locatie optici:
-senzori cunatici(fotoemisivi,fotovoltaici,fotoconductivi)
-senzori termici(termistor,bolometru,termocuplu)
-alte variante(fotochimici,fotoplastici,fotoceramici)
Stim ca sistemele DCS sunt sisteme dedicate folosite in controlarea proceselor de
productie care sunt continue. Pentru a intelege aceasta operatiune sa luam spre exemplu un
sistem DCS implementat intr-o hidrocentrala. Sistemul din acea uzina controleaza debitul de
apa care trece prin generatoarele hidrocentralei reducand riscul de a se suprasolicita sau de a nu
functiona deloc. Acest lucru se se face utilizand senzori de presiune sau debit, valve de control
si a unui controler. Semnalele de la senzori despre debitul de apa sunt transmise la controler via
unui semnal I/O. Cand debitul maxim sau debitul depasit de apa este atins acest semnal este
transmis unei valve sau unui mecanism actionandul si oprind debitul pana cand acest revine la
normele normale. Desigur o hidrocentrala poate avea sute de puncte I/O care formeaza un
imens sistem DCS.
Elementele sistemului DCS pot interactiona direct cu mediul fizic (reglarea de
pompe,valve,comutatoare) sau pot lucra cu ajutorul unui sistem aditional numit SCADA.
SCADA (Supervisory Control And Data Acquisition)
SCADA (Supervisory Control And Data Acquisition) adica Monitorizare Control si
Aschizitii de Date se refera la un sistem vast de masurare si control. Aceste sisteme sunt
folosite pentru a monitoriza si controla procesele fizice,chimice si de transport.
De cele mai multe ori cand vorbim de un sistem SCADA ne gandim la un centru de
comanda care monitorizeaza si controleaza un spatiu de productie. O mare parte a operatiunilor
sunt executate automat de catre RTU(Remote Terminal Unit) Unitati Terminale Comandate la
Distanta sau de PLC(Programmable Logic Controller) Unitati Logice de Control Programabile.
Centrul de comanda detine functii de control de tip decizional si administrativ.
6
Arhitectura unui sistem SCADA
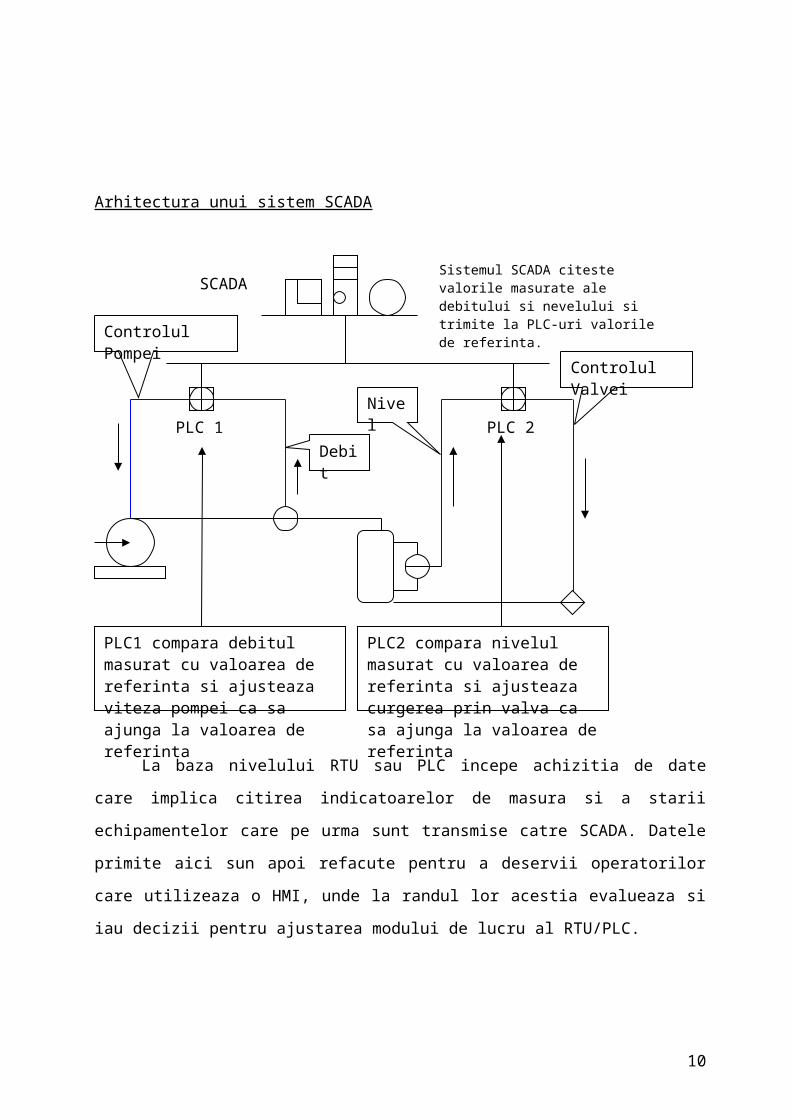
La baza nivelului RTU sau PLC incepe achizitia de date care implica citirea
indicatoarelor de masura si a starii echipamentelor care pe urma sunt transmise catre SCADA.
Datele primite aici sun apoi refacute pentru a deservii operatorilor care utilizeaza o HMI, unde
la randul lor acestia evalueaza si iau decizii pentru ajustarea modului de lucru al RTU/PLC.
Sistemul SCADA contine o baza de date care contine elemente numite „puncte”. Acele
puncte sunt niste valori de intrare/iesire hardware sau software controlate de sistem. Punctele
hard reprezinta o intrare sau iesire conectata la sistem iar punctele soft reprezinta rezultatul
unor operatiuni matematice si logice.
RTU fac conexiunea cu echipamentele controlate, vad starea acestora, citesc datele
masurate (presiune,tensiune,debit) si pot trimite semnale de inchidere sau deschidere a unei
valve sau pompe. Deasemenea RTU pot citi starile logice digitale sau cele analogice si pot
trimite comenzi digitale sau setari de valori analogice de referinta.
SCADASistemul SCADA citeste valorile masurate ale debitului si nevelului si trimite la PLC-uri valorile de referinta.
Debit
Controlul Pompei
PLC 1 PLC 2
Nivel
Controlul Valvei
PLC1 compara debitul masurat cu valoarea de referinta si ajusteaza viteza pompei ca sa ajunga la valoarea de referinta
PLC2 compara nivelul masurat cu valoarea de referinta si ajusteaza curgerea prin valva ca sa ajunga la valoarea de referinta
7
Alarmele fac parte din implementarea SCADA si reprezinta o stare logica a unui punct
cu valoarea de Normal sau Alarmat. Alarmele sunt create in asa fel incat se activeaza cand
conditiile sunt indeplinite, de exemplu nivelul bateriei unei masini sau nivelul de benzina. Cu
ajutorul alarmelor in caz de neregularitate operatorul SCADA este atentionat si poate remedia
situatia, el fiind avertizat prin intermediul unui mesaj sau chiar email.
PLC-urile sunt niste computere mici cu un microprocesor folosit in automatizarea
proceselor cum ar fi controlul unei masini intr-un proces automatizat. PLC-ul este programat de
catre un inginer, care creaza programul iar apoi il introduce in memoria EEPROM. PLC-urile
sunt niste computere mai speciale in deoarece ele sunt prevazute cu intrari/iesiri catre senzori si
relee. PLC-urile citesc starile acestor senzori iar apoi comanda diverse mecanisme in actiunea
de control si reglaj.
HMI a aparut din nevoia unui terminal prietenos pentru utlizator intr-un sistem de PLC-
uri. Mai multe PLC-uri care controleaza un sistem aduna date iar aceste date erau greu de
adunat manual avand si undeori o forma bruta, insa aici apare HMI care are rolul de a aduna
combina si structura datele din PLC intr-o forma mult mai prietenoasa.
Un sistem SCADA este alcatuit din:
- mai multe RTU sau PLC
- statia master si HMI
- infrastructura de comunicatie
Statia Master si HMI se refera la serverele si software-ul responsabil cu comunicarea
echipamentelor amplasate la distanta (RTU,PLC) si apoi cu HMI. In sistemele SCADA mici
statiile master pot fii doar niste PC-uri obisnuite, chiar unul insa in sisteme mari aceste statii
sunt deseori alcatuite din mai multe servere, unitati de salvare in caz de dezastre si aplicatii
software.
Pentru a putea fi mai usor inteleasa informatia sistemul SCADA o prezinta utilizatorului
sub forma unei schite sugestive, unde operatorul poate lua decizii de inchidere sau deschidere a
unui mecanism, datele fiind trasmise in timp real.
Sistemle SCADA comunica folosind conexiuni radio combinate,serilae sau conexiuni
modem si deseori conexiuni Ethernet si IP/Sonet la statii mari. Protocoalele initiale SCADA
sunt Modbus,RP-570 si Conitel, iar protocoalele standard sunt IEC 60870-5-101 sau 104,
Profibus si DNP3 acestea din urma fiind protocoale standardizate recunoscute de majoritatea
producatorilor.
8
Protocoale SCADA:
Protocolul Modbus este un protocol de comunicattii situat pe un nivel foarte aproape de
utilizator( nivel 7) , fiind bazat pe o arhitectura master/slave sau client/server. Este un protocol
foarte utlizat conceput de Modicon pentru PLC-urile proprii avand niste avantaje:
-protocol deschis cu documentatie disponibila
-este implementat intr-un timp scurt(zile)
-foloseste biti sau octeti si nu impune cerinte mari producatorilor
Acest protocol permite administrarea unei retele de dispozitive (un sistem cu senzori
care transmite datele unui computer). El este folosit deseori la conectarea unui computer de
verificare cu un RTU intr-un sistem de achizitii date SCADA.
Exista 2 variante de comunicare seriala a protocolului MODBUS:
-MODBUS RTU (datele sunt reprezentate binar intr-o forma compacta)
-MODBUS ASCII (datele se reprezinta ASCII avand o forma usor de interpretat)
Pentru a intelege functionarea protocolului MODBUS trebuie sa stim urmatoarele
lucruri:
- toate dispozitivele ce comunica folosind protocolul Modbus au o adresa unica
- orice dispozitiv poate trimite comenzi, insa doar dispozitivul master o face
- o data trimisa comanda Modbus ea poate ajunge la mai multe dispozitive insa doar
dispozitivul tinta raspunde la ea deoarece comanda contine adresa sa.
- o comanda Modbus contine si informatii de verificare pentru asigurarea veridicitatii
raspunsului.
- implementarile Modbus folosesc 4 metode de transmisie de date
(fir,wireless,sms,gprs).
Niste exemple de comenzi date de Modbus ar fi:
- o comanda ce modifica valoarea intr-un registru RTU
- o comanda care cere RTU sa-i furnizeze o valoare continuta de registru
Aproape toate implementarile Modbus au variatii de la standardul oficial, iar cele mai
uzoale sunt:
9
Formatul datelor
- 8 bit data
- 32 bit integer
- Floating point IEEE
- Tipuri de date mixte (mixed data types)
- Bit fields in integer
- Multiplier pentru modificarea datelor de la/catre integer:10,100,1000,256...
Extensiile protocolului
- 16 bit slave addresses
- 32 biti data size (1 adresa = 32 biti de date returnate)
- word swapped data
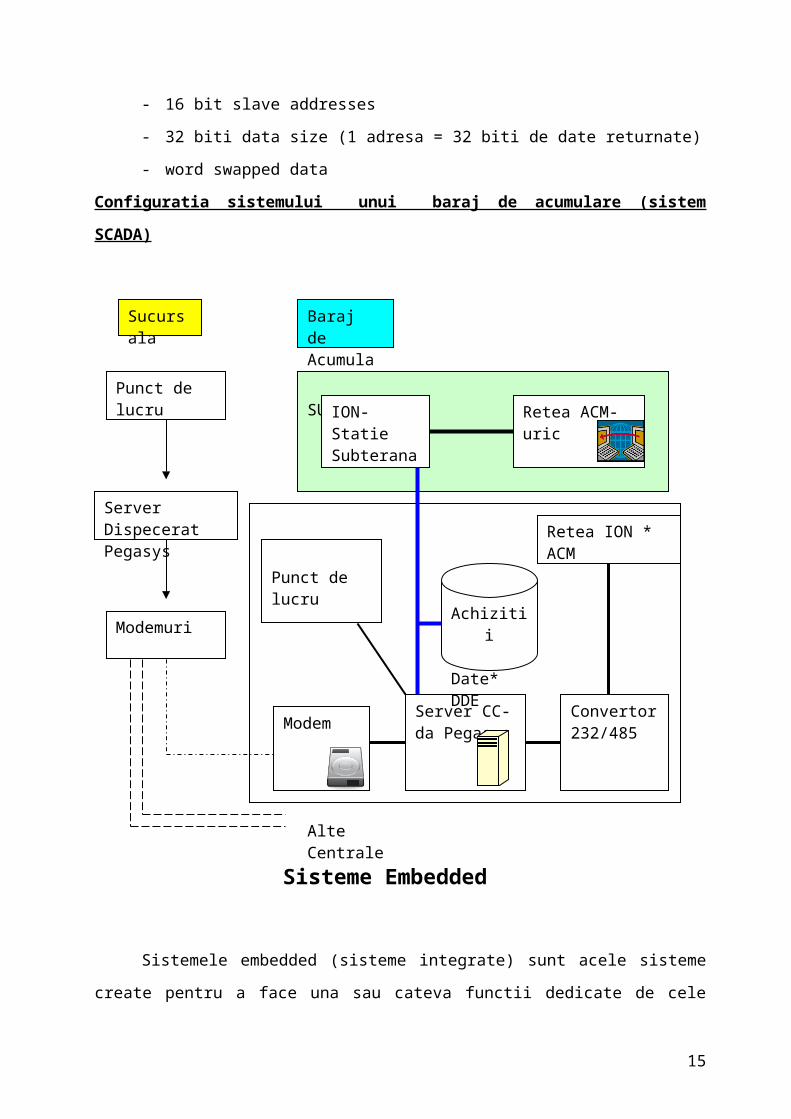
Configuratia sistemului unui baraj de acumulare (sistem SCADA)
Sucursala
Punct de lucru
Server Dispecerat Pegasys
Modemuri
Baraj de Acumulare
SUPRATERAN
ION- Statie Subterana
Retea ACM-uric
Punct de lucru
ModemServer CC-da Pegasys
Convertor 232/485
Retea ION * ACM
Achizitii
Date* DDE
Alte Centrale
10
Sisteme Embedded
Sistemele embedded (sisteme integrate) sunt acele sisteme create pentru a face una sau
cateva functii dedicate de cele mai multe ori in timp real. Sunt integrate in sensul ca fac parte
dintr-un sistem complet care adesea contine parti mecanice si hardware. Un obiect de
comparatie ar fi PC-urile de azi care au un scop general in comparatie cu sistemele embedded
care deobicei desemneaza un singur scop. Avand in vedere ca sistemele embedded se ocupa
doare de anumite operatiuni ele pot lua dimensiuni mici si pot fi produse in masa pentru
anumite scopuri (ceasuri de mana,mp3 playere,semafoare,etc). De cele mai multe ori aceste
sisteme cuprind in componenta lor un procesor, memorie ram , memorie flash.
Sistemele embedded comunica cu lumea exterioara prin diferite conexiuni periferice:
- interfata de comunicatii seriale (RS-232,Rs-422,etc)
- USB
- Carduri multimedia (SD, Compact Flash,etc)
- Retele (LonWorks,Eternet,etc)
- Analog/Digital – Digital/Analog
- Debugging (JTAG „IEEE 1149”,ISP,BDM)
Datorita migrarii componentelor electronice de consum catre aplicatiile industriale au
modificat proiectarea PC-urilor embedded. Cand se utilizau PC-urile in aplicatii industriale se
dorea o prelucrare a pc-ului pentru a deservii un singur scop, de modificare a anumitor
standarde, astfel realizand trecerea de la magistrala PCI la CompactPCI pentru sistemele
embedded. Realizandu-se acest lucru multe companii care realizau placi de baza specializati in
sisteme embedded si industriale s-au grabit in a scoate tot felul de calculatoare monoplaca. Insa
din multitudinea de realizari cea care a atras atentia a fost sistemul embedded numit F3 realizat
de MEN Micro. F3 foloseste numeroase componente initial erau facute pentru PC-uri
cum ar fi un BIOS (creat de General Software Inc.) module de memorie SO/DIMM, memorie
Compact Flash cu interfata IDE si un cip care era un fel de mini PC (un intreg PC pe un singur
cip). Avand toate aceste caracteristici F3 putea rula toate aplicatiile create pentru PC-uri
inclusiv pachete de software industrial (timp real). Deasemenea fiind un embedded pentru
industrie putea suporta o temperatura intre -45 si +85 grade Celsius, socuri, vibratii,
contaminare chimica, umiditate, putand fi facute diverse upgrade-uri pentru a rezista celor mai
dure conditii de mediu ambiant. Desemenea fiind atat de asemanator unui PC oferea o gama
larga de optiuni de I/O:
11
- intrari si iesiri analogice si numerice
- I/O de masuratori si instrumentatie
- Interfata pentru FieldBus
- Interfete de comunicatii
- Interfata de retea local Ethernet 10/100 Mbps
- Sistem audio
- Acceleratoare grafice
- Iesiri video (CRT,LCD,TV)
Avand toate aceste accesorii incorporate pe o placa de baza de dimensiuni reduse face ca
sistemele embedded sa fie foarte cautat insa pretul este pe masura. Multe sisteme industriale nu
au nevoie chiar de toate capabilitatiile oferite de aceste sisteme asa ca au fost produse sisteme
embedded mult mai reduse la accesorii insa cu un pret mult mai mic, astfel a aparut F3 SBC
care nu are nici un panou frontal , nu are conectoare pentru magistrala CompactPCI. Sistemul
embedded F3 SBC ofera un exemplu bun de un adevarat sistem embedded care poate fi
conectat in interiorul echipamentului pe care il controleaza neavand nevoie de nici un panou
frontal.
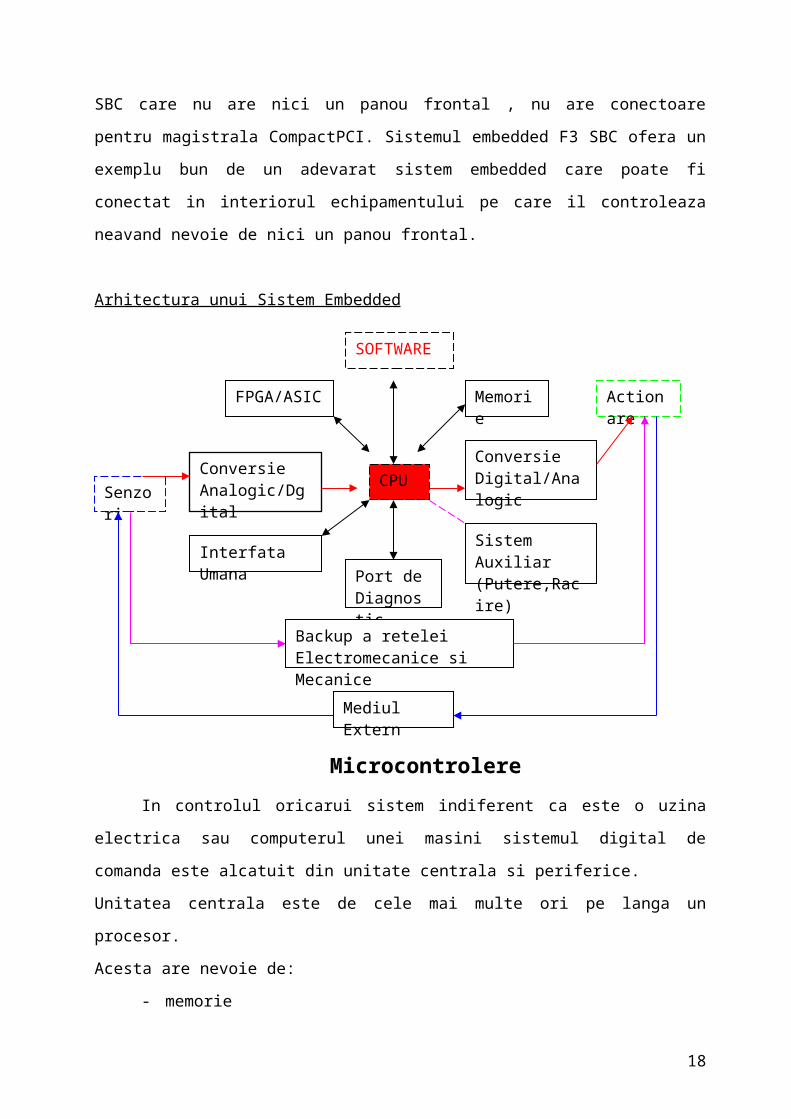
Arhitectura unui Sistem Embedded
SOFTWARE
MemorieFPGA/ASIC
Conversie Analogic/Dgital
Conversie Digital/Analogic
Interfata Umana
Port de Diagnostic
Sistem Auxiliar (Putere,Racire)
SenzoriCPU
Actionare
Backup a retelei Electromecanice si Mecanice
Mediul Extern
12
Microcontrolere
In controlul oricarui sistem indiferent ca este o uzina electrica sau computerul unei
masini sistemul digital de comanda este alcatuit din unitate centrala si periferice.
Unitatea centrala este de cele mai multe ori pe langa un procesor.
Acesta are nevoie de:
- memorie
- generator de ceas
- interfata cu periferice
Optional:
- timere
- convertor A/D sau D/A
- interfete seriale
- controler de intreruperi
Toate aceste componente au fost comasate intr-o singura placuta de siliciu obtine
astfel un microcontroler adica un sistem de calcul intr-un chip. Avantajele sunt dimensiunea
mica si totalitatea componentelor comasate intr-un singur chip adica spatiul redus. Se poate
realiza in sistem complex de prelucrare si control industrial folosind un numar mic de pieses si
astfel se renunta la multitudinea de cablaje necesare. La realizarea microcontroalelor s-au
adaugat diverse periferice pentru crearea membrii familiei de microcontrollere. In functie de
aplicatie se poate alege un model sau altul al familiei. Modelele pot fi prevazute cu memorie
de tip PROM ,EPROM,EEPROM sau FLASH insa acestea se pot mari. Limbajul de asamblare
disponibil acestor microcontrollere este asemanator procesoarelor avansate. Ele sunt usor de
programat insa in functie de model apar setari diferite.
Tipuri de microcontrollere:
1) ARM
Microcontrollerul ARM este un microcontroller RISC „Reduced
Instruction Set Computer” (set redus de instructiuni de calcul) pe
32 de biti creat de ARM Holdings. Arhitectura ARM este cea mai
uzuala arhitectura ISA „Instruction Set Arhitecture” pe 32 de biti
bazandu-se pe numarul fabricat, ele fiind create la inceput ca un
procesor pentru PC-uri. Datorita simplicitatii procesoarelor ARM
le face perfecte pentru aplicatiile care necesita putere redusa. Acest lucru a dus la dominarea
13
acestor microcontrollere pe piata echipamentelor electronice embedded si mobile (aproximatic
90% din telefoanele mobile folosesc procesoare ARM).
2) AVR
Microcontrollerul AVR este un chip RISC de 8 biti
modificat creat de Atmel in 1996. AVR a fost unul din
primele microcontrollere care a folosit un chip de memorie
flash destinat programelor in comparatie cu EPROM (care
se putea programa doar o data) sau EEPROM. Din aceeasi
familie apartin si (tinyAVR,megaAVR,XMEGA,AVR cu
FPGA). Memoria Flash,EEPROM si SRAM sunt integrate
intr-un singur chip neamai fiind nevoia unei memorii externe.
3) ColdFire
Acest Microcontroller este derivat dintr-un microprocesor de
68k creat pentru sisteme embedded de catre Freescale
Semiconductor. Aceste microcontrollere pot fi aduse la viteze
de calcul de pana la 300 mhz fata de 75 mhz. Sunt mai multe
generatii a versiunii Coldfire(v1,v2,v3,v4,v4e,v5). Cel mai
recet update este microcontrollerul Coldfire pe 32 biti lansat in 2007.
4) MSP430
MSP430 este un microcontroler de semnal creat de
Texas Instruments pe baza platformei de 16 biti.
MSP430 este creat pentru a fi utilizat de aplicatii
embedded cu un consum redus de energie, cel mai
utilizat fiind in ingineria radio si wireless, utilizand mai
putin de 1 microamper in idel. Puterea CPU este de
aproximativ 25 mhz. Puterea sa poate fi redusa pentru a
scadea consumul de energie. Controllerul utilizeaza 6 functii diferite de reducere a
consumului de energie ceea ce-i permite sa intre intr-o stare de „hibernare” in timp ce
perifericele sale inca lucreaza. MSP430 nu are un bus de memorie externa ceea ce il
limiteaza la memoria sa de pe chip (pana la 256 kb flash si 16 kb RAM ).
14
5) PIC
PIC este o familie de microcontrollere cu arhitectura
Harvard creat de Microchip Technology. Numele sau
deriva din "Peripheral Interface Controller" si sunt
foarte populare in zona industriala insa si printre
persoanele cu un hobby catre aceasta ramura datorita
pretului redus, utilizabilitate larga, o larga gama de
aplicatii, programe, unelte de dezvoltare gratuite, se poate spune ca este un microcontroller
open source . Se gaseste in o varientate de modele pe 8 biti,16,32 si 16 pe semnal digital.
Sisteme de achizitie de date
Structura unui Sistem de Achizitii de Date
Prin achizitie de date intelegem procesul de obtinere de date de la o sursa externa
sistemului de calcul. Aceste sisteme trebuie sa asigure urmatoarele functii:
- convertirea fenomenului fizic in marime masurabila
- prelucrarea semnalelor generate de senzori spre a extrage informatia
- analiza si prelucrarea datelor si prezentarea lor intr-o forma de inteles
Clasificarea senzorilor (traducatori)
Clasificare dupa iesirea de siguranta:
Fenomen Fizic
SenzorConditionare Semnal
Elemente de Executie
Achizitie Hardware
Software Achizitie date si analiza
15
- Digitale
- Analogice
Clasificare dupa tipul conversiei:
- o marime fizica este convertita in marime electrica
Criterii de selectie a senzorilor
Iesire de tip digital/analogic, pe curent/tensiune:
- senzori pe curent
- senzori pe tensiune
Banda de trecere:
- semnale care variaza lent:banda joasa
- semnale care variaza rapid: banda larga
Elemente care conditioneaza semnalele:
- amplificare (modifica rezolutia, iesirea senzorului< 10mm mV)
- filtrare (elimina zgomotele)
- izolare (elimina tensiuni inalte)
- excitatie
- multiplexare (masoara mai multe semnale lent variabile)
Elementele cuprinse intr-un sistem de achizitii de date sunt:
- procesor
- memorie
- busuri pentru transfer de date
- spatiu disc
- DMA (semnal)
- CLK (semnal)
Un sistem de achizitii de date inglobeaza pe langa elementele fizice si un software de achizitie.
Acest software este cuprins din:
Driver care:
- controleaza frecventa de achizitie
- citeste/ scrie datele de pe placa
- acceseaza multiple In/Out de pe placa
- are acces la mai multe placi
Aplicatia Software care:
- gestioneaza datele
16
- afiseaza graficele
- prelucreaza datele
Pasii urmati de un sistem de achizitie de date
Circuite FPGA (Field Programmable Gate Array)
Circuitele FPGA fac parte din mare familie a circuitelor de tip VLSI (Very Large Scale
Integration), iar procesul VLSI este procesul prin care se creaza circuite integrate prin
combinarea a mii de tranzistori intr-un singur chip. La momentul actual de la inceperii crearii
acestor VLSI in anii 70, productia a evoluat in directia in care nu se mai folosesc mii de
tranzistori ci miliarde. Dintre familia circuitelor VLSI fac parte:
- Retele de porti
- Celule Standard
- Macro-celule (blocuri constructive)
- Retele logice progamabile (PLA)
- Dispozitive logice programabile (PLD)
- Retele de porti programabile (FPGA)
Circuitele FPGA (Field Programmable Gate Array) sunt circuite integrate programabile
de utilizatori.
- field programmable : „programabil in teren” ceea ce inseamna ca o data scos pe
piata este programat de catre utilizator
- gate aray : reprezinta o matrice de porti (blocuri) logice
Deci un FPGA este un circuit integrat digital care este configurabil de catre utilizator
dupa fabricatia sa (spre deosebire de alte dispozitive cu functie implementata din fabrica) avand
o arhitectura destul de complexa si complicata.
Structura tipica a unui bloc logic:
Aplicatia Software
Driver
Hardware Achizitie Date
Utilizator
17
Un FPGA este format din:
- Configurable Logic Blocks (CLB) : acest CLB contine un Look Up Table (LUT) cu
mai multe iesiri, care ajuta la implementarea functiilor logice (AND,OR,NOT,etc).
- I/O pads : aceste iesiri/intrari sunt folosite pentru a interactiona cu lumea exterioara,
aducand si trimitand semnale din/spre FPGA.
- Canale de rutare: deasemenea configurabile ele sunt conexiunile dintre elemente.
Datorita configurabilitatii lor se pot face legaturi intre CLB si I/O pads pentru ca
FPGA-ul sa faca acele conexiuni dorite.
Ele fac posibil accesul rapid la circuitele VLSI configurabile. Circuitul FPGA este
format dintr-o retea de celule logice, acestea putand fii interconectate cu ajutorul
comutatoarelor de rutare programabile. Ele au fost scoase pe piata de firma Xilinx, evoluand o
data cu crearea diferitor tipuri de dispozitive in care erau inglobate. Fiind faptul ca productia
lor se face relativ rapid iar pretul este scazut utilizarea acestor circuite a luat un avans mare
fiind lag folosite si raspandite. Datorita faptului ca ele reprezinta un mediu de implementare
pentru circuitele VLSI ofera diverse avantaje fata de alte tehnologii alternative cum ar fi
(MPGA „Mask-Programmable Gate Array” – care a fost creat pentru sustinerea circuitelor
logice mari, celulele standard si macro-celulele) :
- Circuitele FPGA reduc semnificativ circuitul de productie si proiectare
- Circuitele FPGA asigura reducerea costului productiei circuitelor VLSI
Toate aceste avantaje sunt datorate optiunii de a permite utilizatorului sa programeze
circuitele, astfel reducand durata de proiectare.Aceasta programare de catre utlizator se face in
una din metodele:
- limbaj HDL (Hardware Description Language) asemanator cu cel ASIC
(Application Specific Integrated Circuit)
- Prin realizarea unei cheme PCB
- Ambele metode de mai sus (folosite impreuna)
4 intrari
Look-Up Table
D Flip-Flop
Ceas
IesiriIntrari
18
Circuit FPGA creat de Xilinx
Totusi aceasta programare de catre utilizator area si ea defectele sale insa inca se fac
eforturi pentru dezvoltarea unei arhitecturi optime pentru circuitele FPGA. Circuitele FPGA se
intalnesc in mare parte in procesele de fabricare.
Dupa tehnologia utilizata in procesul de productie FPGA-urile se impart in mai multe
tipuri:
- SRAM : avand la baza sa celulele SRAM ele pot fi programate sau reprogramate
chiar daca sunt instalate in sistem.
- Antifuse : ele pot fi programate doar in laboratoare speciale cu ajutorul anumitor
dispozitive. O data programate ele nu mai pot fi reprogramate.
- Fuse : se programeaza doar in laborator si nu mai pot fi reprogramate apoi.
- EPROM : (Erasable Programmable Read-Only Memory) programate doar o data
continutul lor poate fi sters cu ajutorul razelor ultraviolete.
- EEPROM : (Electrically Erasable Programmable Read-Only Memory) similare
celor EPROM insa acestea pot fi reprogramate.
- FLASH : baza lor sta in celulele Flash care sunt foarte mici ceea ce le face ieftine.
Ele pot fi reprogramate.
Avantajele unui circuit FPGA sunt:
- procesoare care depasesc pragul de 500mhz
- posibilitate de crestere a puterii
- programabile in teren
- design simplu
- rezistente un mediu dur (-40 si + 85 grade celsius)
- garantie pe termen lung (>10 ani)
Dezavantajele folosirii circuitelor FPGA ar fi:
- cerintele mari de energie
- pretul ridicat/ chip
- pot necesita programe de programare externe (unele nu)
- necesita timp pentru a boota (unele sunt instante)
- au dimensiuni realtiv mari
Aplicabilitate circuitelor FPGA este vasta dintre care se poate enumera : procesare de
semnale digitale, aerospatiale, sisteme de aparare, sisteme software audio, industria medicala,
19
recunoasterea vorbirii, criptografie, emulare hardware, astronomie, etc. O mare arie in care
aceste circuite sunt larg intalnite este in spargerea de coduri, in special atacuri directe in forta
folosind algoritmi criptografici. Circuitele FPGA sunt deocamdata utilizate in aplicatii in care
volumul de productie este mic datorita arhitecturii lor.
BibliografieA Brief History of Automatic Control by Stuart Bennett iunie 1996 : pag 17-23.
20
Practical Distributed Control Systems (DCS) for Engineers and Technicians from IDC Technology : Chapter 1 pag 1-10, Chapter 2 pag 35-40, Chapter 5 pag 95, Chapter 6 pag 131-135.
DISTRIBUTED CONTROL SYSTEMS - Process Control in the Chemical Industries from Chemical Engineering Department King Saud University, 2002 : pag 132-144.
SCADA: Supervisory Control and Data Acquisition Stuart A. Boyer (Author) : Unit 2 pag 9-14, Unit 3 pag 19, Unit 6 pag 58-60, Unit 8 pag 89-90, Unit 10 pag 123.
Practical SCADA for Industry (IDC Technology) David Bailey BEng (Author) : Cap 1 pag 1-9, Cap 2 pag 12-15, 17-19, Cap 3 pag 64-65.
Senzori inteligenti "plug and play" conf. Tom SAVU Universitatea POLITEHNICA din Bucuresti.
FPGAs 101: Everything you need to know to get started author Gina Smith: Chapter 3 pag 43-54.
Senzori inteligenti si Achizitii de Date Prof. dr. ing. Valer DOLGA Curs Facultatea de mecanica , Universitatea Politehnica Timisoara.
SISTEME DE ACHIZIŢII DE DATE Editura Universităţii din Oradea autor Gacsádi Alexandru si Tiponuţ Virgil an 2005 : Capitol 1 pag 7-15.
Intelligent Sensor Design Using the Microchip dsPIC (Embedded Technology) author Creed Huddleston : Chapter 1 pag 8-16, Chapter 6 pag 162, Chapter 7 pag 209, Chapter 8 pag 229.
21





























