Embed Size (px)
Citation preview

Automatic Wave Equation Migration Velocity Analysis
Peng Shen, William. W. Symes
HGRG, Total E&PCAAM, Rice University
This work supervised by Dr. Henri Calandra at Total E&PThank to Dr. Scott Morton at Amerada Hess Corp.
Velocity Analysis
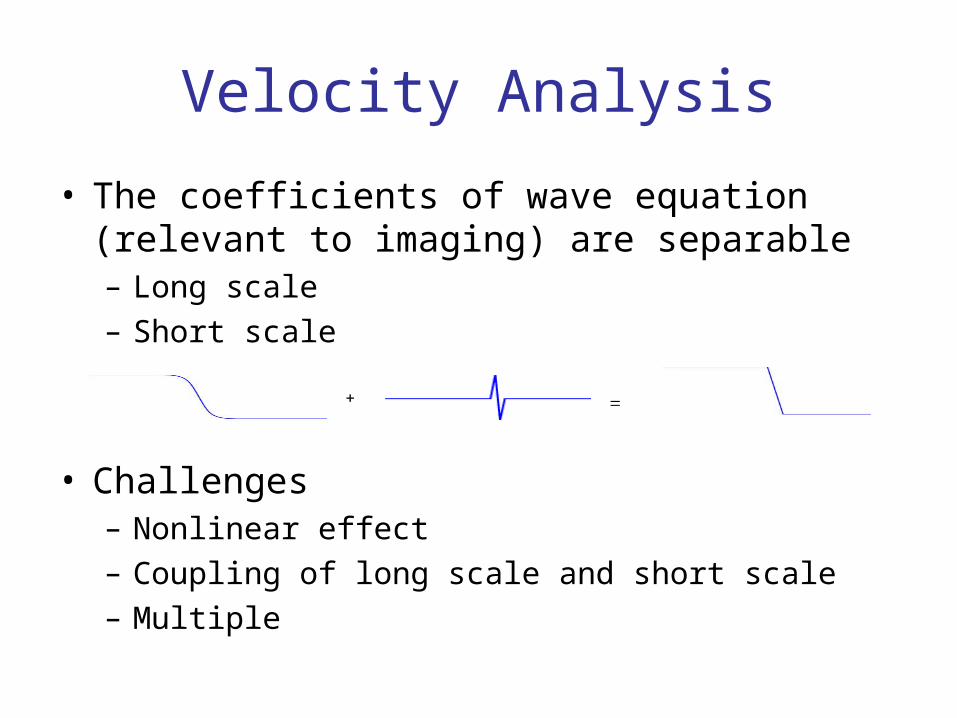
• The coefficients of wave equation (relevant to imaging) are separable– Long scale– Short scale
• Challenges– Nonlinear effect– Coupling of long scale and short scale– Multiple

Methods of Velocity Analysis
• Data domain objectives– Waveform inversion– Stereotomography
• Image domain objectives– WE-Migration forward, ray tracing inverse– WE-Migration forward, WE-Migration inverse

Outline
• Theory– Objective function– Gradient
• Calculation• Physical meaning• Smoothing
– Aliasing
• Examples– Angle ~ Offset– Reconstruct short scale and large scale variations

Generalized Born Modeling
Reflection occurs instantaneously with no separation in space.
Reflection occurs instantaneously separated by a finite distance.
Do not require to use the true velocity.
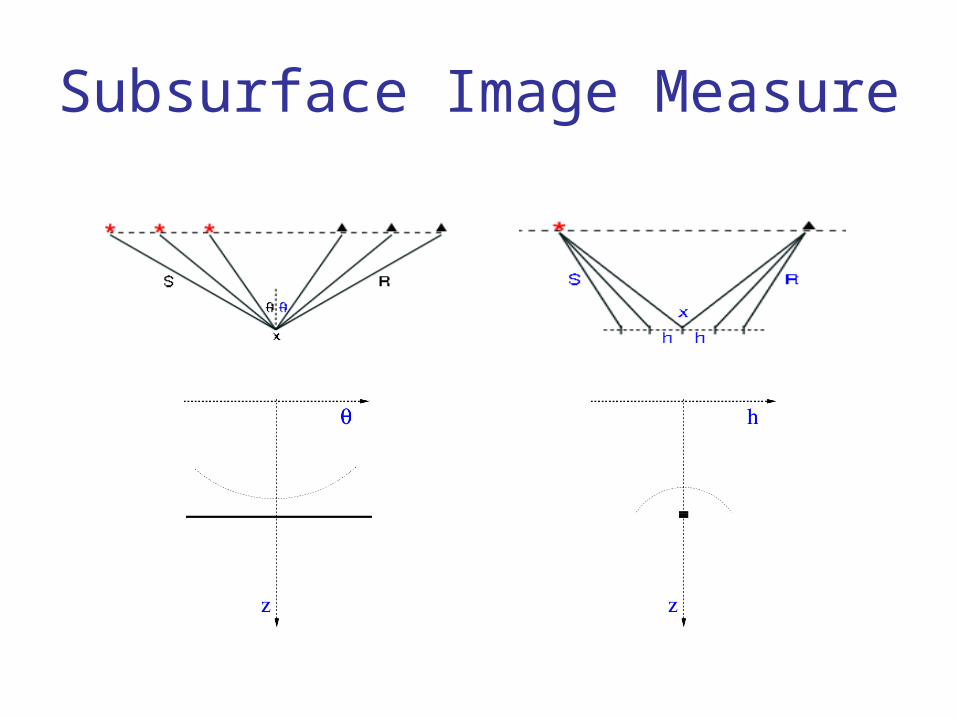
Subsurface Image Measure

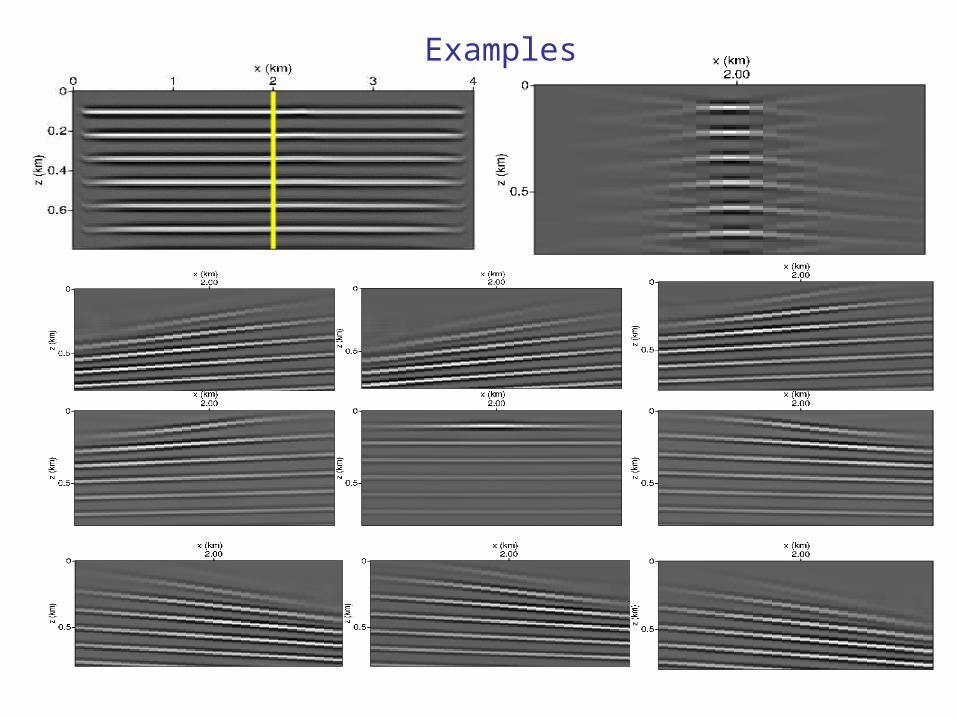
Example
Data generated with caustic, migrated using correct and background velocity.

Differential Semblance
)()(),( hxfhxIh ||),(|| hxhIh
)(),( xgxI ),(),(
hxIRxI
hh
Offset domain:
Angle domain:
Pseudo-differential operator of00,1S
The objective function is smooth in velocity and is suitable for automatic velocity updating (Stolk & Symes, 2003).

Gradient Calculation
}{ 2*
hh
c Ihc
IrealJ
}{2
2*
*
hh
c RIRc
IrealJ
Offset:
Angle:

Gradient: Physical Meaning
Single scattering, constructive interference occurs at zero offset.

Gradient: Physical Meaning
“Two scatterings”, constructive interference occurs on ray segments.

Smoothing
• Problem– The raw gradient is singular with full data bandwidth.
• Solution– Confine the velocity model to the space of B-splines.
• Controlled degree of smoothness• Compactly supported basis
• Implication– Projection to B-spline model space.– B : forward interpolation - sparse dense– B*: adjoint projection - sparse dense

Example
Flat reflector, constant velocity Projected gradient using BB* for one shot
The gradient + B-spline projection reconstructs wide ray paths which are controlled by the degree of smoothness supplied.

Optimization on B-spline space

Aliasing
• We care not only the image in zero offset but also its move-out in non-zero offsets.
• There are many non-zero offset aliasing effects.– Data pre-conditioning.– Acquisition edge effect.

Kinematics
u
zhH
c
ZH 2222 )(
0);,(
)()()( 22222
HhzF
ZHc
uzHh

Kinematics of Image in Offset
u<c u=c u>c
c
u
Z
z
Z
h
1
)1( 22
2
22
2
Examples

Anti-aliasing
Aliasing reduced but loose some image Strong aliasing

Examples
• Born data
• Full data with rough model
• Initial model construction
• Optimization starting with v(z)

Born Data Examples
Smooth Marmousi velocity model, singular reflectivity, one-way wave simulation, acquisition full spread, receiver dense on surface.

Starting Model
Starting model, large horizontal scales, assumed to be obtainable through conventional velocity analysis tools.
Optimization: 150m x 200m B-spline grid.

Initial Image

Optimized Image
Optimized image using angle domain DSO.
Optimized image using offset domain DSO.

Optimized Velocity
Optimized using angle domain DSO.
Optimized using offset domain DSO.

Initial Angle and Offset Gathers
Top: offset gathers, bottom: angle gathers

Optimized Gathers (angle driven)
Top: offset gathers (not used in the optimization), bottom: angle gathers.

Optimized Gathers (offset driven)
Top: offset gathers, bottom: angle gathers (not used in the optimization)

Velocity Difference
Difference between optimized velocity and the projected true velocity (optimized by angle DSO).
Difference between optimized velocity and the projected true velocity (optimized by offset DSO).

Rough Marmousi Model
Data generated using full wave equation simulation, acquisition split spread, receiver spacing 25m, receiver array across entire surface.
Optimization: offset driven, B-spline grid 120m by 22m.

Initial Velocity and Image
Initial velocity model, corresponds to B-spline grid 900m by 300m.
Initial image

Optimized Velocity and Image
Optimized velocity at 99th iteration Optimized image at 99th iteration

Optimized Velocity and Image
Optimized velocity at 49th iteration Optimized image at 49th iteration
The optimization is stable and convergent.

Obtain a Starting Model
A v(z) starting model.
Optimization: run up to 10Hz, coarse B-spline grid 800m by 400m, 500m by 200m.

Optimized Velocity
800m by 400m, DSO optimized. Projected from the true model.
500m by 200m, DSO optimized. Projected from the true model.

Null Space
Optimized image at 20th iteration. Optimized image at 49th iteration.

Starting with v(z) Velocity
Start from v(z) velocity model, increase frequency and spatial resolution in two steps.
Conclusions
• The angle domain DSO is not superior to offset domain DSO.
• The velocity analysis within migration is a promising direction to pursue.
• The adjoint-differential-migration provides an ideal platform for AWEMVA.







![Symes v. Canada · 2016. 2. 1. · Symes v. Canada WomenÕs Court of Canada [2006] 1 W . C . R . 31 Le Tribunal des Femmes du Canada (TFC) re«examine lÕarre öt Symes c. Canada](https://img.pdfslide.us/doc/110x75/5fe6c61625bd844aea712d81/symes-v-2016-2-1-symes-v-canada-womens-court-of-canada-2006-1-w-c-.jpg)