Embed Size (px)
Citation preview

Automatic Sub-Microwave Measurements on a
Beam-Plasma Experiment
Pedro Francisco de Deus Lourenço
Thesis to obtain the Master of Science Degree in
Engineering Physics
Supervisor: Professor Horácio João Matos Fernandes
Examination Committee
Chairperson: Professor Luís Paulo da Mota Capitão Lemos Alves
Supervisor: Professor Horácio João Matos Fernandes
Members of the Committee: Doctor Jorge Manuel Gonçalves Baptista dos Santos
October 2015

Acknowledgements
First of all, I would like to thank Professor Horácio Fernandes for the constant support in the deve-
lopment of this work, which was critical at all levels, from the conception of the work to the resolution of
both theoretical and experimental issues as well as stimulating scientific thinking. The machine’s original
operation records and experimental guides he provided were of the most importance to understand the
physics behind the system and to overcome the challenges presented.
A special thanks to João Fortunato and Rui Dias for their contribution to overtake many of the techni-
calities presented along every stage of this project and, above all, for sharing their personal experiences
and being available even on their personal time. Finally, a remark to Josué Lopes, my colleague and
present member of the e-Lab team. Due to his contribution it became possible to expedite the process
of integrating this experiment into the e-Lab platform.
I am very grateful to Instituto de Plasma e Fusão Nuclear for all the conditions and means made avai-
lable for the execution of the project. This work was financed by the project Incentivo/FIS/LA0010/2014
granted by "Fundação para a Ciência e a Tecnologia", through a research grant for which I would like to
thank.

Resumo
Os aparatos de interação Feixe-Plasma, desenvolvidos entre as décadas de 1960 e 1980, foram
usados no estudo de plasmas de baixa temperatura e propagação de ondas eletrostáticas. Presente-
mente, estes aparatos apresentam condições únicas para a realização de trabalhos experimentais em
física de plasmas. Neste trabalho utilizou-se o aparato existente no IPFN, IST.
Foi realizado um processo de inspeção ao aparato para compreender os mecanismos envolvidos
no seu funcionamento. Este conhecimento permitiu a conceção do sistema CODAC, utilizado com
sucesso na operação do aparato e na aquisição de dados experimentais, tendo garantindo condições
de reprodutibilidade de resultados. O CODAC desenvolvido é compatível com o e-lab, permitindo a sua
futura integração nesta plataforma e consequente operação remota.
As duas técnicas de diagnóstico, cavidade ressonante e interferometria, foram utilizadas para deter-
minar os parâmetros da coluna de plasma. Para um campo de confinamento de 10,8±0,5mT, pressão
de 3,0±0,1×10−2mbar e corrente de feixe de 18,0±0,5mA, foi possível reconstruir a curva de dispersão
do plasma para frequências inferiores à frequência de plasma através da interferometria. Determinou-
se uma frequência de plasma de 200±1MHz e um número de onda transversal de 0,91±0,03cm−1,
tendo portanto uma densidade de 5,0±0,1×108cm−3. Nas mesmas condições, determinou-se uma
densidade de 3,3±0,9×109cm−3 recorrendo à cavidade ressonante. Esta discrepância de uma ordem
de grandeza foi atribuída ao valor considerado para o raio da coluna de plasma na técnica da cavidade
ressonante e ao gradiente de pressão criado no interior do aparato pela bomba de vácuo.
Palavras-chave: Interação Feixe-Plasma, CODAC, e-lab, Cavidade Ressonante, Interferometria,
Eletrónica de Rádio-Frequência.

Abstract
Beam-Plasma interaction apparatuses, developed between the 1960s and the 1980s, were used to
study the underlying mechanisms of low temperature plasmas and wave propagation. In today’s science,
these can provide an unique environment to perform advanced experimental works on plasma physics.
The apparatus used was the Beam-Plasma experimental apparatus from IPFN, IST.
An initial maintenance and inspection process was conducted on the device to understand the phys-
ical mechanisms behind operation. Then, this insight was used to design and implement a CODAC
system which was successfully used to operate the apparatus and acquire the experimental data, guar-
anteeing conditions of reproducibility for the operating conditions and parameters of the experiment. The
CODAC hardware was made compliant with e-lab, allowing for a future integration under this platform
and ultimately leading to the possibility of complete remote operation.
Two diagnostic techniques, resonant cavity and interferometry, were used to determine the parame-
ters of the plasma column. For a confinement field of 10.8±0.5mT, pressure of 3.0±0.1×10−2mbar and
electron beam current of 18.0±0.5mA, it was possible to reconstruct the dispersion relation for frequen-
cies below the plasma frequency using interferometry. The technique allowed the determination of the
plasma frequency at 200±1MHz and the transverse wavenumber of 0.91±0.03 cm−1, thus with a den-
sity of 5.0±0.1×108cm−3. Under the same conditions, the density determined with resonant cavity was
3.3±0.9×109cm−3, thus one magnitude above. This discrepancy was attributed to the plasma column
radius considered inside the cavity and to the pressure gradient created inside the interaction chamber
by the vacuum pump.
Keywords: Beam-Plasma Interaction, CODAC, e-lab, Resonant Cavity, Interferometry, Radio-Frequency
Electronics.

Contents
Contents ii
List of Figures v
List of Tables vi
List of Acronyms vii
1 Introduction 1
1.1 Plasma Physics and Radio Communications . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Fundamental Plasma Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Wave Propagation in Plasmas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Electrostatic and Electromagnetic Waves . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.2 Instabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.3 Distribution Function and Landau Damping . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Apparatus Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4.1 Experimental Set-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.2 Langmuir Probes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.3 Interferometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.4 Resonant Cavity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.5 Review of Main Publications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 Real-Time Control Systems 16
2.1 Control System Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Variable Control Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.1 PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.2 Velocity Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Hardware Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Software Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
i

3 The Beam-Plasma Interaction Experiment 24
3.1 General Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Vacuum System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Pressure Monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Gas Injection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.5 Electron Gun . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.6 Electrostatic Collector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.7 Confinement Coils and Quadrupole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.8 Fixed Langmuir Probe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.9 Movable Langmuir Probe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.10 Resonant Cavity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 The CODAC 42
4.1 CODAC Architecture and Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.2 Control and Data Acquisition Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.2.1 Control Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2.2 Aquisition Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3 Microcontroller State Machine and Commands . . . . . . . . . . . . . . . . . . . . . . . . 47
4.4 RF Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 Experimental Results and Discussion 53
5.1 Resonant Cavity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2 Interferometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.3 Overall Assessment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6 Conclusions and Future Work 61
References 66
A Appendices 67
A Apparatus and CODAC Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
A.1 Console Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
A.2 Setup Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
B Experimental Protocols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
B.1 Electromagnetic Cavity Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
B.2 Determination of Dispersion Relation via Interferometry . . . . . . . . . . . . . . . 73
C Technical Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
ii

List of Figures
1.1 Dispersion diagram for the waveguide wave and the plasma wave propagation for a filled
waveguide. The variable β stands for the wave propagation constant, k. From reference14. 5
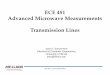
1.2 Front view of the Beam-Plasma experimental apparatus setup. It is possible to observe
the confinement coils placed allong the lenght of the a apparatus as well as the beam
alignment quadrupole. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
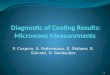
1.3 A Langmuir probe in most simple configuration. From reference24. . . . . . . . . . . . . . 9
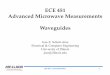
1.4 Plasma I-V characteristic. Electron Saturation (A) and Ion Saturation (C). From reference24. 9
1.5 Example of the pattern obtained with the Interferometry technique. From reference26. . . 10
1.6 Plasma dispersion relation. From reference26. . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7 Fields inside the resonant cavity. From reference26. . . . . . . . . . . . . . . . . . . . . . 13
1.8 Suppression of the electron cyclotron instability with the addition of a second resonant
beam. Time evolution of amplitude measured with probe in fixed positions: (I) in the
absence of the secondary beam, (II) with a second resonant beam and (III) with a non-
resonant second beam. From reference6. . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1 Simple PID block diagram in frequency domain. The terms Gc and Gp refer to the con-
troller and system gains respectively. From reference31. . . . . . . . . . . . . . . . . . . . 18
2.2 Assembled dsPICnode V3.0 board with a 30F4013 microcontroller. . . . . . . . . . . . . . 20
2.3 Complete e-lab framework architecture. The Beam-Plasma apparatus (Experimental Ap-
paratus) is connected to the ReC through the control and acquisition hardware (Hardware
Controller). Form reference45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Example of an experiment GUI on e-lab framework, "Ondas estacionárias e velociade do
som experiment". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1 Cross section schematic of the apparatus. Based on reference6. . . . . . . . . . . . . . . 25
3.2 Vacuum cut and venting valves mounted on a VARIAN DS102 rotary pump with a KF
DN40 T connection joint. The bellow leads to the turbo pump. . . . . . . . . . . . . . . . . 26
3.3 Connection schematic of the valves introduced into the vacuum system. . . . . . . . . . . 27
3.4 Gas injection system. The gas line (blue) from the pressure regulator connects to the
gas cut valve (right), follows to the proportional valve (center) and enters the interaction
chamber through the manual security valve (top). . . . . . . . . . . . . . . . . . . . . . . . 29
iii

3.5 Schematic of the helium gas injection system. . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.6 Plot of pressure as function of the proportional valve aperture for a gas line pressure of
0.3bar over atmospheric pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.7 Step response of the MPT100 gauge to MKS248A valve aperture steps: 40-77% and 10-
70% (acquisition intervals of 75ms). It is possible to notice the transition between the dual
gauge measuring elements (Transition). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.8 Linear fit to determine the pressure variation slope as a response to the valve aperture
step as well as the response delay. These were used to calculate the PID parameters.
The data used is the same as in the 10-70% step of the plot on Figure 3.7. . . . . . . . . 32
3.9 Plot of the pressure controlled by the implemented PID algorithm for five different set-points. 33
3.10 View of the components that constitute the electron gun: (a) - Tungsten filament placed at
the holder; (b) - Inner view of the cup; (c) - Side view of the filament cup. The acceleration
plates are electrically isolated from the cup by three ceramic rods; (d) - Electron gun fitted
to the apparatus. The gun is cooled with distillate water in a closed fluid circuit. The
cables connected to the plates and filament are also visible. . . . . . . . . . . . . . . . . . 34
3.11 Model representation of the electrostatic collector: (a) - Collector head detail; (b) - Collec-
tor mounted on the support tube and top end flange. . . . . . . . . . . . . . . . . . . . . . 36
3.12 Rear view of the apparatus. The confinement coils placed form the electron gun to the
end of the interaction chamber in order to provide an homogeneous magnetic field across
the experiment. It is also possible to observe part of the quadrupole . . . . . . . . . . . . 37
3.13 Fixed Langmuir probe positioner: (a) - Manually adjustable positioner with probe; (b) -
Inner view of the inside of the positioner where the below and probe jacket are visible. . . 38
3.14 Movable Langmuir probe: (a) - Inner view of the interaction chamber seen from the elec-
tron gun side. The probe holder slides along the chamber over two parallel rails, fixed on
both ends of the chamber section; (b) - Movable probe mounted on the sliding support
during the process of cable replacement and cable mechanism re-adjustment. . . . . . . 39
3.15 Traction mechanism of the movable probe system: (a) - View of the section which holds
the cable mechanism (inside). The cables are winded on the drive shaft pulleys. Below,
there is a steel tube with a weight that maintains the probes coaxial cable under tension.
The position encoder (blue) connected to the drive shaft and the head of the electrostatic
collector are also visible; (b) - DC motor and reduction gears connected to the drive shaft. 39
3.16 : (a) - Electron gun cup mounted on the section which contains the resonant cavity. On
the side of the section it is possible to observe the port for antenna insertion; (b) - Loop
antenna used in the resonant cavity mounted on the positioner. . . . . . . . . . . . . . . . 40
4.1 CODAC integration on a 3U 19-inch Rack. From left to the right: local-host, control board,
acquisition board, BNC panel and turbo pump driver. . . . . . . . . . . . . . . . . . . . . . 42
4.2 CODAC integration schematic. Both boards can work and communicate separately with
the local-host via RS232 communication protocol. . . . . . . . . . . . . . . . . . . . . . . 43
iv

4.3 The two CODAC boards: Control board on the left and Acquisition board on the right. . . 44
4.4 Bock diagrams for the control and acquisition boards of the CODAC system. . . . . . . . . 46
4.5 ReC State machine50 implemented into the boards microcontrollers (a) and sample of the
acquisition board output (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.6 Schematic of connections made in order to implement the resonant cavity diagnostic tech-
nique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.7 RF equipment: Boonton 42A Microwattmeter (top left), HP 3200B VHF Oscillator (top
right) and HP8620A Sweep Oscillator (bottom). . . . . . . . . . . . . . . . . . . . . . . . . 50
4.8 RF equipment: (a) - dual directional coupler HP 777D with two HP 420A crystal detectors
(on top), HP 423A crystal detector (bottom left) and HP 10514A mixer (bottom right); (b) -
Set of two VHF attenuators, HP 355C and HP 355D and two HP 8447A RF amplifiers; (c)
- Two HP 8447A RF amplifiers connected in series; (d) - RF stub, model GRC 874-D20L. 50
4.9 Schematic of connections made in order to implement the interferometry diagnostic tech-
nique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.1 Resonant cavity in vacuum at 2.1×10−5mbar: transmitted, reflected and incident signal. . 53
5.2 Resonant cavity transmitted signal for vacuum (2.1±0.1×10−5mbar) and for different gas
pressures with an electron current of 18mA and confinement field of 10.8±0.5mT (4±0.2A). 54
5.3 Correlation plot between pressure and electron density determined with the resonant cav-
ity technique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.4 Plasma E(x) patterns for three specific frequencies in the sweeped range. . . . . . . . . . 56
5.5 Plasma dispersion relation for an electron beam current of 18mA. . . . . . . . . . . . . . . 57
5.6 Plasma transverse wave number for an electron beam current of 18±0.5mA. . . . . . . . 57
5.7 Experimental determination of phase velocity for an electron beam current of 18±0.5mA. 58
5.8 Experimental determination of group velocity for an electron beam current of 18±0.5mA. 59
5.9 Plasma column inside the cylindrical resonant cavity where a is the radius of the passing
holes and a’ is the actual radius of column. . . . . . . . . . . . . . . . . . . . . . . . . . . 60
A.1 Schematic of the CODAC hardware front BNC connections panel, used to acquire exper-
imental data from the diagnostics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
A.2 Schematic of connections for resonant cavity diagnostic technique implementation. Ob-
serve that the image may mislead in how to correctly alight the loop antennas. The normal
plane of the loop must be aligned along θ, thus with the axis of the loop perpendicular to
z 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
A.3 Plots of power as function of frequency for emitted, reflected and transmitted signals. In
this case, the incident power is assumed to be ideally constant. As expected, a maximum
in the transmitted power coincides with a minimum in the reflected power. From reference85. 72
A.4 Schematic of connections for interferometry diagnostic technique implementation.85. . . . 74
A.5 Example of the patterns detected in the interferometry protocol. From reference85. . . . . 75
v

List of Tables
3.1 Resistance and inductance of the gas valves solenoids. . . . . . . . . . . . . . . . . . . . 30
3.2 Derived PID parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.1 CODAC Boards Terminal I/O. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1 Peak Fit results for Figure 5.2. Electron beam current of 18±0.5mA and confinement field
of 10.8±0.5mT (4A). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Fit results for plasma dispersion relation from Figure 5.5, calculated parameters and com-
parison with average transverse wave number from Figure 5.6. Electron beam current of
18±0.5mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3 Comparison between density results determined with resonant cavity and interferometry
techniques under the same experimental conditions: pressure of 3.0±0.1×10−2mbar,
electron beam current of 18±0.5mA and confinement field of 10.8±0.5mT. . . . . . . . . 59
A.1 CODAC BNC Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
A.2 CODAC Terminal Commands (Short Version). . . . . . . . . . . . . . . . . . . . . . . . . . 70
A.3 Experimental parameters for the cavity protocol. . . . . . . . . . . . . . . . . . . . . . . . 73
A.4 Experimental parameters for the interferometry protocol. . . . . . . . . . . . . . . . . . . . 75
vi

List of Acronyms
ADC Analog to Digital Converter
ATX Advanced Technology Extended
CA Channel Access
CAN Controller Area Network
CBT Clock-Based Tasks
CODAC Control, Data Access and Communica-
tion
CSS Control System Studio
DDC Direct Digital Control
DSC Digital Signal Controller
DSP Digital Signal Processor
EBT Event-Based Tasks
EEPROM Electrically Erasable Programmable
Read-Only Memory
EPICS Experimental Physics and Industrial Con-
trol System
FCFS First-Come, First-Served
FILO First-In, Last-Out
FPGA Field-Programmable Gate Array
GUI Graphical User Interface
HCI Human-Computer Interface
HDL Hardware Description Language
HF High Frequency
I/O Input/Output
I2C Inter-Integrated Circuit
IOC Input/Output Controller
IS Interactive System
MCU Microcontroller Unit
PV Process Variable
PWM Pulse-Width Modulation
RAM Random-Access memory
RCL Remote Controlled Laboratory
ReC Remote experiment Control
RF Radio Frequency
RTC Real-Time Control
RTCS Real-Time Control System
SPI Serial Peripheral Interface
UART Rniversal Asynchronous Receiver/Trans-
mitter
UHF Ultra High Frequency
VHF Very High Frequency
vii

Chapter 1
Introduction
Plasmas occur on Earth’s atmosphere as a natural phenomenon and they can originate through
two different processes: high-voltage discharges, which result from the accumulation of electrostatic
potential in the atmosphere, cause the ionization of the surrounding particles in the air1; radiation and
energetic particles that hit the atmosphere coming from space, producing particle ionization at the upper
layers of the atmosphere.
This last process and the confinement provided by Earth’s magnetic field creates the atmospheric
layer known as Ionosphere. The principal source of ionization is energetic electromagnetic radiation
from the sun2. Other important sources are energetic charged particles of solar origin and galactic
cosmic rays2. The rate of particle ionization both depends on the intensity of the solar radiation and
on the ionization efficiency of the neutral particles present in the atmosphere2. By passing through the
atmosphere, the radiation of the sun is progressively absorbed. Thus, its ionizing ability depends on the
length of the interaction path2. Due to its importance to fields such as telecommunications, it is crucial
to study the low density plasma that characterizes the Ionosphere.
1.1 Plasma Physics and Radio Communications
Plasma physics is one of the scientific areas of knowledge that has suffered major advances in
the last decades3. It has given a large contribution, along with the scientific development itself, to the
technological achievements in fields such as telecommunications.
In the 1950s, long range telecommunications were still performed on the high frequency band (HF)
and one way to achieve this was to use the ionosphere because of its reflective and blocking properties
to electromagnetic waves of certain frequencies1.
The ionosphere comprises the ionized region of the atmosphere and starts at an altitude around
50km2. The ionization process is the result of interaction between the space radiation, mainly from the
Sun, and the particles that constitute the atmosphere4. The ionosphere is divided in layers2;5 according
to temperature and electronic density, which change with the time of the day, latitude, season and solar
activity4;2, and it has been object of several studies over the past decades4.
1

As a plasma, the medium presents a plasma frequency below which there is no radio wave propa-
gation, named the cutoff frequency. As the density varies with altitude, so does the cutoff frequency of
the medium1. By using this characteristic, it is possible to perform long range communications in the HF
frequency band2. A radio wave transmitted from a given position on Earth propagates until it reaches
an altitude with cutoff frequency equal to the wave’s own frequency forcing the wave to be reflected
back down1. For frequencies higher than the cutoff, reflection does not occur and waves propagate
through the plasma medium. Nevertheless, the ionosphere affects the performance of communication
bands such as VHF, UHF and even higher frequency bands with phenomena such as, wave refraction,
absorption and frequency shift and ultimately leading to the degradation of radio transmissions between
ground stations and satellites4.
Thus, plasma physics plays a fundamental role in telecommunications and it is crucial to under-
stand the wave propagation mechanisms inside the ionosphere. In order to have some insight over the
physical models that govern plasmas, several experiments were conducted on beam-plasma interaction
machines6;7;8 and Q-machines9;10.
The Beam-Plasma experiment is an experimental apparatus that allows to study the propagation of
waves at a low temperature plasma, which is generated by the interaction of a low energetic electron
beam with Helium gas inside a low pressure chamber with cylindrical geometry6;7;8. Therefore, it be-
comes relevant to give a more detailed look into the mentioned experiment to understand its importance
and how it can still present today a relevant part in the study of plasma physics and wave propagation.
1.2 Fundamental Plasma Parameters
A simple definition for a plasma can be "a quasineutral gas of charged and neutral particles which
exhibits collective behaviour"1. This means that an ionized gas cannot be defined as a plasma unless it
presents specific characteristics.
The fundamental characteristic of plasmas is the presence of oscillations resultant from the electric
fields produced between particles of opposite charge: electrons and ions. Electrons have a mass much
smaller than ions and, therefore a much smaller inertia. Considering that ions are fixed in the form of
a background wall relatively to the motion of electrons, the generated electric fields make the electrons
oscillate around their equilibrium positions1. This oscillations are very fast and have a characteristic
frequency, the plasma frequency, which is given by the following expression:
ωp =
(ne2
ε0me
)1/2
, (1.1)
where me stands for the electron mass, e for the electron charge and ε0 for the vacuum permittivity.
Since these are constant parameters, the plasma frequency is proportional to n, the medium electronic
density.
The motion of particles inside the gas does not depend only on local particle collisions. The presence
2

of charged particles leads to the occurrence of electric fields that affect the motion of charged particles in
other regions of the plasma. This is called collective behaviour1;11. Another characteristic is the shielding
that plasma presents to electric potentials, allowing the formation of clouds of charged particles around
a surface of a given electric potential. This cloud, or the sheath, shields the surrounding plasma from
the applied potential and is characterized by a thickness called the Debye length λD:
λD =
(ε0KTene2
)1/2
. (1.2)
The term KTe represents the thermal motion of the electrons, where K is the Boltzmann constant and
Te is the electron temperature. Due to their higher mobility, electrons have a major contribution to the
thickness of the shielding layer1. The number of particles inside the shielding cloud must be high in
order for the shielding to take place. The number of particles inside the Debye shielding shaped as a
sphere can be defined as:
ND = n4
3πλD
3, (1.3)
which must be much larger than one1. For distances larger than the Debye, L λD, occurs an effective
shielding for the applied potentials, allowing for quaisneutrality. This expression refers to the fact that for
a gas under the mentioned conditions, the density of ions, ni, and electrons, ne, is approximately the
same:
ni ≈ ne ≈ n, (1.4)
and therefore, approximately equal to a term n, the plasma density, but still maintaining the presence
of electromagnetic forces. The last criteria is based on the fact that motion on a plasma must be ruled
by electromagnetic forces instead of collisions between charged and neutral particles1. This can be
represented by the condition ωτ > 1, with ω representing the frequency of plasma oscillations and τ the
mean time between collisions of charged particles and neutrals.
In the presence of an imposed magnetic field ~B, charged particles behave according to the model of
the harmonic oscillator, presenting a cyclotronic frequency:
ωc =|q|Bm
, (1.5)
with q the particle charge, B the magnetic field and m the particle mass. Charged particles also travel
along the ~B field lines, exhibiting circular motion in the plane perpendicular to the field lines1;11. Using
this propriety, it is possible to confine the charged particles in a plasma by controlling the magnetic field
lines. The radius of the orbit in that plane, around the guiding center and with velocity v⊥, is called the
Larmor radius:
rL =v⊥ωc. (1.6)
The circular motion of the charged particles has opposite direction for particles of positive and neg-
ative charge, since the motion produces a field that must contradict the magnetic field of the medium1.
The presence of an imposed electric field ~E in the medium results in a drift of the guiding center of
3

the particle trajectory with a velocity given by:
vE =[ ~E × ~B]
B2. (1.7)
1.3 Wave Propagation in Plasmas
An arbitrary sinusoidal oscillating plane wave can be expressed in the form A(~r, t) = Aej(~k·~r−ωt),
being k the wave propagation constant in the medium. A useful relation is k = 2π/λ. The concepts of
phase and group velocities can be explained as follows: the first represents the velocity at which a point
of constant phase on a wave travels and is given by vϕ = ω/k while the second, given by vg = ∂ω/∂k, is
the velocity of the traveling waves envelope1.
The beam-plasma experiment allows to study the propagation of electrostatic waves. Waves can
have a electromagnetic or electrostatic nature.
1.3.1 Electrostatic and Electromagnetic Waves
Assuming the presence of an electromagnetic field in the form ~B = ~B0 + ~B1, the subscript 0 repre-
sents an homogeneous term, while 1 stands for a small oscillating perturbation1. For an electrostatic
wave, B1 is zero and for an electromagnetic wave it is different from zero. When a wave is denoted as
parallel or perpendicular it refers to the relative position between ~k and ~B01.
The electric field can also be decomposed in ~E = ~E0 + ~E1, similarly. The terms longitudinal and
transverse refer to the direction between ~k and ~E11.
1.3.1.1 Electron Electrostatic Waves
Plasma oscillations can propagate due to the thermal motion of the particles, creating a plasma
wave. Since a plasma is a dispersive medium, i. e. the value of k is not constant for all values of ω in
the medium, it is possible to derive the following expression for the electron plasma12 waves:
ω2 = ωp2 +
3
2k2vth
2, (1.8)
where vth2 = 2KTe/me is the thermal velocity. The experimental confirmation for this dispersion relation
was done by Barrett et al. in 19689. These are parallel waves and exist even if B0 is zero.
These waves can be excited with the use of an electron beam. The interaction between the waves
and the beam make the oscillations grow. Experiments have shown that there were modes associated
with the wave inside the medium13. For a cylindrical plasma column, the values of k are limited to integer
multiples of half the wave length that fit inside the cylinder length, forming standing wave patterns such
as inside a wave guide13.
Another form of electron electrostatic waves is the upper hybrid waves, which are perpendicular
waves. In this situation, the magnetic field is perpendicular to ~k and therefore, apart from the electric
4

(a) Plasma referential. (b) Electron beam referential.
Figure 1.1: Dispersion diagram for the waveguide wave and the plasma wave propagation for a filled waveguide. The variable βstands for the wave propagation constant, k. From reference 14.
field, the Lorentz force is applied, affecting the particles orbits. The higher restitution force that acts on
the particle origins a higher frequency for the wave. Disregarding the thermal velocity, the dispersion
relation for these is given by:
ω2 = ωp2 + ωce
2 = ωh2 (1.9)
with ωce, the cyclotron frequency for electrons and ωh, the upper hybrid frequency.
The experimental observation for this last dispersion relation can be seen on the work from Trivel-
piece and Gould, published in 195914. This paper refers to the study of space charge (electrostatic)
waves inside a cylindrical plasma column. It is mentioned that these can propagate even in the absence
of a drift motion or thermal velocities of the plasma14. They consider a metallic cylindrical container for
the plasma in the cases of partial and complete filling. The container is treated as a waveguide. It is also
presented the dispersion diagram for the waveguide wave and the plasma wave propagation inside the
filled medium, Figure 1.1a. In Figure 1.1b it is shown the same result but on the referential of a electron
beam crossing the medium, which is the result of a coordinate transformation from the plasma to the
beam referential, ω′ = ω + ku0 with u0 the velocity of the drifting electrons in the beam14.
1.3.1.2 Ion Electrostatic Waves
Similarly to sound waves, electrostatic waves can propagate in the plasma through collisions. But
even in the absence of collisions, ions can still transmit vibrations due to their charge1. These are the
so called ion acoustic waves15 or ion plasma waves. For these waves, ~k is parallel to ~B0 and can even
exist if B0 is zero. The dispersion relation is given by:
ω2 = k2cs2, (1.10)
where cs is the speed of sound. For the ion acoustic, cs2 = (γeKTe + γiKTi)/mi, but for higher frequen-
cies, the Debye shielding becomes significant and the speed of sound is given by cs2 = (γiKTi)/mi +
5

((γeKTe)/mi)(1/(1 + γek2λDe
2)) and the waves are classified as ion plasma waves1. The terms γ
represent the adiabatic constant.
In the cases where k is perpendicular to B0, the waves are denominated as lower hybrid waves. In
this case, since electrons flow along the magnetic field lines, there is a break in overall neutrality and the
dispersion relation is:
ω2 = k2cs2 + ω2
l . (1.11)
The term ωl is the lower hybrid frequency, and is given by ωceωci, the product of the cyclotronic frequen-
cies for electrons and ions, respectively.
If the angle between ~k and ~B0 is comprised between 0 and π/2 the overall neutrality can still be kept
and the resulting waves are called ion cyclotronic waves1. Electrons can still keep the Debye shielding.
Like in upper hybrid waves, both electrostatic and Lorentz forces are apllied, thus the dispersion relation
is:
ω2 = k2cs2 + ωci
2. (1.12)
The first experimental work related to the ion cyclotronic waves was published by Motley and D’Angelo
in 196316. Although it was conducted on a Q-Machine, similar work was also performed on Beam-
Plasma experiments, regarding the study of ion electrostatic waves17;8.
The waves that travel on the plasmas can be excited via the interaction with sources, such as,
electron beams or radio frequency pulses. These are called instabilities.
1.3.2 Instabilities
Plasma instabilities are oscillations that grow very fast and result from the presence of available free
energy in the system18. It is important to denote that, in a finite confined plasma, the free energy results
from the fact that the medium is not in complete thermodynamic equilibrium19. The growing rate of
instabilities is denoted by the term γ.
Under certain conditions, the dispersion relation can present complex solutions, thus ω = ωr + jωi
with the subscripts r and i representing the real and imaginary terms of the frequency ω, respectively.
Given the expression for an arbitrary sinusoidal oscillating plane wave and if the term ωi is positive, the
amplitude of the wave becomes proportional to the exponential factor exp(ωit). Otherwise, the wave is
evanescent. The term ωi is then the growing factor of the instability, γ. The simplest case of this situation
is the two-stream instability. Stream instabilities are driven by the drift energy provided by a stream or
beam of particles that travel through the plasma1. Ion acoustic waves can be excited by ion and electron
beams. In a magnetized plasma medium, electrostatic ion cyclotron waves can also be excited either by
streaming electrons or ions19.
Instabilities are classified according with the source of energy that enables the growth of oscillations
and the spacial localization of the oscillations in the medium1. Although there are several categories,
these can be divided into two main groups: absolute and convective instabilities18;19. An instability is
absolute if an initial disturbance produces a response that grows in time at every spatial point18. It is
6

convective if the oscillations move in space while growing in amplitude i.e., the growing amplitude is
convected away19. These are definitions established within a fixed observer frame18. The maximum
amplitude of the instabilities is limited by non-linear processes that intervene when the occurrence of
the instability changes significantly the conditions by introducing perturbations in the medium18. Insta-
bilities can also be divided into microscopic and macroscopic. While microscopic instabilities result in an
increase of turbulence in the plasma, macroscopic instabilities can create significant material displace-
ments in the medium19. These displacements ultimately lead to confinement loss and to the release of
considerable energy.
Given the previous remarks, in order to develop effective suppression mechanisms it is crucial to
understand the underlying processes that drive plasma unstable.
1.3.3 Distribution Function and Landau Damping
Due to the very large number of particles, it is very difficult to describe a plasma collectively through
the individual characterization of the single particles. Statistical physics has provided a solution to this
problem by describing the particles that constitute a gas, the ensemble, via a distribution function20. The
Maxwell-Boltzmann distribution function1 is:
f(v) =
(m
2πKTe
)3/2
exp
(− mv2
2KTe
), (1.13)
and gives the probability of finding a particle in the medium with average velocity v, and consequently,
with a certain energy20. This is valid under equilibrium conditions20.
Landau damping is a characteristic of collisionless plasmas1. This effect is related to the particles
in the distribution function with the velocity in the same order of magnitude of the phase velocity of
an electrostatic wave propagating in the medium. This allows for energy exchange between the wave
and the particles traveling along the wave. If in the velocity distribution there are more slow electrons
rather that fast, there will be an energy transfer from the wave to the electrons causing the damping of
the wave1. The first experimental verification was performed by Malberg and Wharton in 196621. The
power absorption by the plasma is studied by Brownell in his paper published in 197222.
1.4 Apparatus Overview
The beam-plasma experiment allows the study of the interaction between a low energetic electron
beam and a low temperature Helium plasma. In plasmas, the characterization of the medium is achieved
through specific measurement techniques that allow the determination of the plasma parameters. Due to
their importance, diagnostics in plasmas physics are an extensive field which has presented a technolog-
ical and scientific revolution over the past decades. Some of these fundamental diagnostic techniques
are present in the Beam-Plasma apparatus. Thus it is crucial to understand the physical principles
behind their application.
7

1.4.1 Experimental Set-up
The front view of the experimental set-up core can be found on Figure 1.2. The experiment is made
on a cylindrical interaction chamber with a diameter of 8cm and a length of 75cm6. The low pressure
on the system is achieved through two vacuum pumps, a first stage rotary pump and a turbo pump to
achieve background pressures in the order of 10−6mbar. The chamber is filled with Helium until the
final pressure is around 10−4mbar. A vacuum gauge is connected to the chamber and allows to read
pressure values.
Figure 1.2: Front view of the Beam-Plasma experimental apparatus setup. It is possible to observe the confinement coils placedallong the lenght of the a apparatus as well as the beam alignment quadrupole.
The electron beam is produced by an incandescent filament23 in Pierce configuration6, located on
the left side of the machine, while the axial confinement is provided by 10 coils placed along the chamber.
These produce an homogeneous magnetic field (within 1%) with values around 0.01T6.
At the right end of the chamber is placed an electrostatic energy analyzer, aligned with the beam
and machine axis. The energy of the beam is typically in the order of 2keV, 10mA and 4mm diameter6.
The experiment has a resonant electromagnetic cavity for density measurements. There are also one
movable and several fixed Langmuir pin probes along the interaction chamber6.
1.4.2 Langmuir Probes
Langmuir Probes are one of the earliest, most simple and most used diagnostics for the study of low
temperature plasmas24. They allow to do density, electron temperature and potential measurements25.
A thin cylindrical metallic wire, usually made of tungsten and with a diameter bellow 1mm, is immersed
into the plasma medium while a sweeping electrical potential is applied to it. By varying the potential on
the probe it is possible to determine the I-V characteristic of the plasma (Figure 1.4) or, in other words,
the electric current drawn by the plasma versus applied voltage24. In Langmuir probes with a single wire
(Figure 1.3), the electrical potential is measured relatively to the apparatus chamber.
The immersion of the probe into the plasma results on a local perturbation of the medium. For a
floating probe, electrically insulated from the apparatus and in contact with the plasma, the electrons
charge the probe negatively so the total electric current is zero. This means that electron and ion
currents are equal. The potential of the probe is in this case Vf , the floating potential, which is the
8

Figure 1.3: A Langmuir probe in most simple configuration. From reference 24.
potential of the plasma in the presence of the probe. In this case, the plasma potential without the probe
is then denominated as Vp, the plasma potential.
Figure 1.4: Plasma I-V characteristic. Electron Saturation (A) and Ion Saturation (C). From reference 24.
The region (A) (Figure 1.4) is called electron saturation. In this case, the applied potential V is higher
than Vp, and a maximization of the electron current occurs because all electrons arriving to the probe
are being collected while ions are being repulsed24. If V is inferior to Vp, thus negative comparatively
to the plasma, electrons gradually become repelled by the negative potential of the probe (Region B)
until Vf is reached. If V goes below Vf only ions are collected by the probe reaching the ion saturation
(Region C). On a cylindrical probe, the shape of the characteristic curve suffers some changes but it is
still possible to identify the three distinct areas such as on Figure 1.4.
With a detailed analysis of the plot and making adequate assumptions it is possible to determine
the mentioned parameters26. Assuming that electrons follow a Maxwellian distribution function near the
9

floating potential, the electronic temperature Te can be determined with the expression,
ln(−ie) ≈eV
kBTe+ ln(C) (1.14)
were C is a constant. With this, the Debye lenght can be derived using expression (1.2). The ion
saturation current can be directly determined from the plot and knowing that it is approximately given26
by,
i+ ≈ 0.55Aen+0
√kBTemi
(1.15)
were A = 2πrpl is the collecting area of the cylindrical probe, it becomes possible to calculate the
density of the plasma with the expression:
n+0 ≈i+
2π0.55rple√
kBTe
mi
(1.16)
If the radius of the probe rp is much smaller than λD, a correction can be performed to the previous
calculation by replacing the value of rp with the one found for λD 26. The plasma frequency ωpe can
therefore be determined by applying expression 1.1.
1.4.3 Interferometry
The interferometry technique used in this apparatus allows the determination of the dispersion dia-
gram for 0 ≤ ω ≤ ωpe of the plasma column created by the electron beam and Helium gas interaction.
This is achieved by using a RF generator and two Langmuir probes as antennas. The waves injected
via the fixed probe, propagate through the plasma and are detected with the movable probe in different
positions along the plasma column length26. The injected and detected signals are mixed, producing an
interferometry pattern such as in Figure 1.5.
Figure 1.5: Example of the pattern obtained with the Interferometry technique. From reference 26.
In this case, a completely filled cylindrical plasma wave guide aligned with ~z axis is considered and
10

the transverse wave number ~kx is referred as p. For an electric field in the form of:
Ez = E0J0(pr)exp(jmθ)exp (j(ωt− kz)) (1.17)
and considering the fundamental mode (m = 0) and p = 2.405/a, where a is the radius of the plasma
column it is possible to derive the following expression for the plasma dispersion relation:
p2
(1−
ω2pe
ω2 − ω2ce
)+ k2
(1−
ω2pe
ω2
)= 0 (1.18)
for the electrostatic waves26. Transverse propagation is in the form of stationary waves with amplitude
dependence on J0(pr) and phase independent of x26.
Figure 1.6: Plasma dispersion relation. From reference 26.
Since the signal is injected in the center of the interaction chamber, there is propagation along ±z.
Considering propagation in +z, the output signal in the mixer, S(z) is26:
E1 = E0 cos (ωt)
E2 = E2 cos (ωt− kz)
E3 = E3 cos (ωt+ kz)
S(z) = E1E2 = E0E2[cos(2ωt− kz) + cos(kz)]
2.
(1.19)
The mixer output is filtered with a low-pass filter, thus the signal becomes S(z) = E0E2 cos(kz)/2. From
the obtained pattern it is possible to determine the wave lengths to the right and to the left of the injecting
probe, thus the value of the corresponding wave numbers using the relation k = 2π/λ. Nevertheless,
due to the fact that reflection, formation of standing waves and interference between the two waves that
propagate in ±z may occur for lower frequencies, it may be necessary to consider that the wavelength
measured is in fact λ/226.
With this technique it then possible to reconstruct the plasma dispersion relation (Figure 1.6) for
0 ≤ ω ≤ ωpe and determine ωpe by applying a numerical fit of expression (1.18) to the pairs (ω, k).
Phase and group velocities can also be determined and the density of the plasma can be calculated by
11

transforming expression (1.1) to ne = ne(ωpe).
1.4.4 Resonant Cavity
In a cylindrical resonant cavity , excited in TM010 mode, the Maxwell equations can be simplified to:∂Ez∂r
= jωµHθ
∂
∂r(rHθ) = jωεrEz
(1.20)
since the magnetic field only has component in ~θ, the electric field in ~z and both fields change over ~θ.
The solution of the system of equations stands:
∂2Ez∂r2
+1
r
∂Ez∂r
+K2Ez = 0 (1.21)
with K = ω2µε. The equation can be solved with Bessel equation,
∂2R
∂x2+
1
x
∂R
∂x+
(B2 − ν2
x2
)R = 0 (1.22)
leading to the solutions: Ez(r) = E0J0(Kr)
Hθ(r) = jE0
Z0J1(Kr)
(1.23)
where J0 and J1 are Bessel functions and Z0 is the wave impedance in the medium. In the wall of the
cavity the electric field must be zero so Kr ≈ 2.405 and the resonance frequency in vacuum is given by:
f0 ≈c
2π
2.405
R(1.24)
where c is the speed of light in vacuum and R is the radius of the cavity. Even if there is a low pressure
helium gas inside the cavity this expression is still a very good approximation. Nevertheless, the pres-
ence of a plasma, thus charged particles, changes the values of ε and µ inducing a shift in the frequency
of resonance26. Other parameter that can be evaluated in the cavity is the quality factor considering fi-
nite conductivity on the walls and no crossing holes for the plasma beam. It is given by the ratio between
the electromagnetic energy (U ) inside the cavity and the power losses (Wp), Q = ωUWp
. By integration of
the former expression it is possible to arrive to a more intuitive form to calculate the Q factor:
Q ≈ Z
RS
2.405
2
(1 +
R
L
) (1.25)
with RS the surface resistance and L the length of the cavity.
For this propagation mode inside a cylindrical cavity with metallic walls it is possible to derive an
expression that returns the plasma electron density as function of the shift in the resonance frequency,
12

Figure 1.7: Fields inside the resonant cavity. From reference 26.
induced by the presence of a plasma column along the cavity axis (1.26)26.
ne[cm-3] =
(8π2meε0
e2R2
a2J21 (x01)
J20 (x01a/R) + J2
1 (x01a/R)× f0 [MHz] 106
)∆f [MHz] (1.26)
The parameters x01, a and R are with respect, the zero of the J0 function, the radius of the passing holes
for the plasma beam in the cavity tops ends and the radius the cylindrical cavity. For the particles inside
the plasma, the motion equation is given by:
mdv
dt= eE + e
[~v × ~B
]−m~vνc (1.27)
where νc is the collision frequency. This expression can be solved in cylindrical coordinates and expres-
sion ~E = ρ ~J can be used to derive the resistivity tensor ρ. The relative permittivity tensor can be written
as [εr] = [I]− j 1ωε0
[σ] , with the conductivity tensor σ is then given by26:
σ =ne2
2m
2(jω + νc)
(jω + νc)2 + ω2ce
2ωce(jω + νc)2 + ω2
ce
0
− 2ωce(jω + νc)2 + ω2
ce
2(jω + νc)
(jω + νc)2 + ω2ce
0
0 02
jω + νc
=
σrr σrθ 0
σθr σθθ 0
0 0 σzz
(1.28)
Using the fact that vD is zero and the previous tensor, it is possible derivative the previous expression
(1.26) for the plasma density by solving the following expression26:
(1
Q1− 1
Q0
)− 2j
∆ω
ω0=
1
ω0ε0
∫VσE2(r)dV∫
VE2(r)dV
(1.29)
This is done26 considering that the density profile of the plasma column is approximately constant and
that νc/ω0 << 1.
1.4.5 Review of Main Publications
Several works have been published regarding results obtained on beam-plasma experiments.
In 1967, Hopman et al. published work on the deceleration of an electron beam during the electron
13

plasma frequency instability. The interference pattern found along the system axis presented a shrinkage
of the wave length due to the deceleration of the beam by the unstable wave27. In the same year,
Vermeer et al. studied the excitation of ion oscillations as a result of the beam-plasma interaction. They
found that the interaction is excited by the slow cyclotron wave on the beam8.
Later, in 1968, Hopman and Ott studied the saturation of the beam-plasma instability, caused by
a flattening of the beam distribution function7. Clear differences were found in the beam distribution
function and correlated to pulse status7. Hopman et al. also published a paper on the electron cyclotron
instability, regarding its characterization28. For a limited parameter range they were able to compare the
experimental results with the theory28.
Figure 1.8: Suppression of the electron cyclotron instability withthe addition of a second resonant beam. Time evolution of ampli-tude measured with probe in fixed positions: (I) in the absence ofthe secondary beam, (II) with a second resonant beam and (III)with a non-resonant second beam. From reference 6.
Then, in 1972, Wakeren and Hopman stud-
ied the trapping of electrons as a result of the
beam-plasma interaction29. The entrapment is
attributed to the large amplitude of electrostatic
waves that arise from the interaction29.
Cabral and Varandas published a paper on the
suppression of the electron cyclotron instability in
19806. This suppression is attained by the injec-
tion of a secondary parallel electron beam which,
when in resonance, results in cyclotron damp-
ing and causes the reduction of the cyclotron
wave power6. The importance of this suppression
mechanism for controlled fusion machines, due to
the similar behaviour between energetic electron
beams and the cyclotron radiation in Tokamaks,
caused by runaway electrons is also mentioned6.
The relation between cyclotron radiation and run-
away electrons was suggested by Spong et al. in
197430.
Two years later, Silva and Cabral published
on the ion oscillations at low pressure regimes17.
These oscillations propagate in azimuthal direc-
tion inside the plasma column and were found
to be exited due to convection effects associated
with a rotation of the column.
14

1.5 Outline
The scientific work developed by several authors over the years has given considerable insight over
the phenomena that govern low density plasmas. Today, more complex experimental setups are used
to study the behavior of plasmas under other working regimes. Nevertheless, the contribution of the
beam-plasma experiment to today’s science is not over.
The beam-plasma provides fundamental insight to the study of plasma physics and slow wave prop-
agation. It allows direct contact with an experimental setup that creates a low-pressure and weakly
ionized plasma in a user controlled environment, equipped with data acquisition systems. The potential
of this machine was limited by the age of the mentioned systems. Moreover, its operation was complex
due to fluctuations in the experimental parameters, which was aggravated by the existing control system,
making it difficult to attain operation regimes in steady-state.
In order to solve this impairment, it became clear that an overall maintenance and upgrade had to
be conducted so the machine becomes compliant with the most recent state of the art control and data
acquisition technologies. Such upgrade now allows achieving reproducibility of the operating conditions
and parameters of the machine and performing advanced experimental works on plasma physics. This
was done by evaluating which options were more suitable to rebuild the machine structure, control and
data acquisition systems, providing a more recent and user friendly interface to replace the previous
one.
15

Chapter 2
Real-Time Control Systems
The process of controlling physical systems via hardware devices and software platforms is a com-
plex task and largely depends on the specific type of control solution appropriate for each specific case.
This is essential in order development an adequate CODAC system for the Beam-Plasma apparatus.
More generally, the data regarding a current state of a given system is collected from sensors positioned
in key locations and this information is used by the control system, through a series of mechanisms,
to adjust the state of the system itself. This can be achieved by a direct decision from the user of the
system or even by a predefined algorithm with user defined parameters. Nevertheless, regardless of the
system, the main goal will always be: actuate in the system variables in order to achieve the desired
behavior for the system.
The term Real-Time Control (RTC) applies when the control system response time, from the sensing
to actuation stages, occurs on a time interval smaller than the time needed for the measured parameters
to change significantly31. Real-Time Control Systems (RTCS) can be classified according to the type of
tasks performed during the control process. Periodic or clock-based tasks (CBT) take place in routines
and are repeated in time intervals adequate to the system characteristics. Each system has its own
characteristic time which can be defined as the time taken by the system to respond to a change in input
or load31. Sampling and performing analog-to-digital conversion (ADC) of an analog output variable of
a sensor or transducer or performing polling on another task or variable status are common examples
for this type of operation. On the other hand, tasks that occur as a response to a specific event rather
than the result of a periodic operation, such as the response of a position switch, are called Event-Based
Tasks (EBT). An Interactive System (IS) appears to be very similar to a combination of the two previously
mentioned tasks. In this case, the characteristic time is not only relative to the process under control but
also to the users response time31.
2.1 Control System Process
The development of a control system for the management of an experimental setup or laboratory
experiment is a common application, especially when dealing with equipment characterized by a wide
16

set of parameters that one needs to control in order to perform a test or a trial.
The interface between the control system and the user is nowadays most commonly performed
through a high level software platform31. But regardless of the application, there are several activities
that can be defined as essential to any control system: data acquisition; analysis and storage; sequence,
loop and supervisory control.
There are also methods that can be implemented into control systems in order to verify and protect
the system against failure and increase overall reliability. System protection can be done both at software
and hardware levels. A possibility is to try to make the systems "fault tolerant"31;32. This means that the
systems are designed in such a fashion that already accommodate mechanisms to suppress faults that
can be predicted to occur - the anticipated faults. Nevertheless, there are faults related to the design of
the system itself - the unanticipated faults32. These design faults are much more difficult to solve.
Given the wide extension of elements, methods and characteristics mentioned, it becomes interesting
to evaluate the adequacy of specific solutions when implementing a control system for a laboratorial
experimental setup.
2.2 Variable Control Algorithms
The most common implementation of the Direct Digital Control principle is done through the PID
algorithm. PID means proportional, integral and derivative and can be implemented either by digital or
by analog methods31. This algorithm is frequently used for variable control because of the conceptual
simplicity it presents. Another alternative is to use the velocity algorithm which is the differential form of
the previous one. Both algorithms are described in detail below as the simplest versions of each one of
them, although, improvement can be done to overcome some of their flaws33;31.
2.2.1 PID
Applying control over a system usually means to set a defined variable to a specific reference value,
named the set-point r(t). The proportional term of the algorithm uses the difference between the ac-
tual value of the output c(t) and the set-point, the error e(t), to generate a control signal m(t). For a
system with fixed parameters this simple approach would be enough, but in reality a controlled variable
presents fluctuations due to the feedback loop. To suppress them, it is possible to add an integral term
to the algorithm. The integration of the error value over a period of time gives a compensation in situ-
ations where a parameter variation is observed. The error that otherwise would achieve a steady-state
situation, can then be reduced to zero. The majority of systems achieve very high performance only with
the described PI algorithm33;31. However, on certain specific situations, the variable under control can
suffer rapid variations and the PI control is no longer able to respond effectively. Measuring the rate at
which the error changes, the derivative term D allows to compensate for these variations by enabling the
controller to respond faster and proportionally to the change rate.
17

The general form of the algorithm in time-domain is given by:
m(t) = Kp
[e(t) +
1
Ti
∫ t
0
e(t)dt+ Tdde(t)
dt
], (2.1)
and the block diagram of the process in frequency-domain (equation 2.2) is given in Figure 2.1. In this
figure, the term Gcis the controller gain and the term Gp is the system gain. The variables Kp, Ti and Td
represent the controller overall gain, the integral action time and the derivative action time, respectively.
These are used to tune the control system to the desired level of performance31.
Gc =M(s)
E(s)= Kp
[1 +
1
Tis+ Tds
](2.2)
With the appropriate Z-transform, the continuous time domain expression for the PID algorithm (2.1)
can be converted into a time discreet expression. By defining a sampling interval for the control system,
Ts, the algorithm can be implemented iteratively through n iterations, each corresponding to a time step
Ts. A variable M can be added and is used to set the operation point for the controller. The term is not
essential but allows a smother change in the value (bumpless transfer)31. The resulting expressions can
be presented as it follows:
m(n) = kpe(n) + kis(n) + kd [e(n)− e(n− 1)] +M,
s(n) = s(n− 1) + e(n),
ki = kpTsTi,
kd = kpTdTs,
(2.3)
where the term s(n) is the integral sum of errors e(n).
Figure 2.1: Simple PID block diagram in frequency domain. The terms Gc and Gp refer to the controller and system gainsrespectively. From reference 31.
2.2.2 Velocity Algorithm
The differential form of the PID is the velocity algorithm. The first is also known as the positional
algorithm since it returns the value of the variable m, the position, while the second gives the variation
rate of the same variable, the velocity31. The expression for the latter case is derived by applying a time
18

derivative to expression (2.1) and then, a discretization in time like previously:
∆m(n) = k1e(n) + k2e(n− 1) + k3e(n− 2),
k1 = kp(1 +TsTi
+TdTs
),
k2 = −kp(1 + 2TdTs
),
k3 = kpTdTs.
(2.4)
One of the main advantages of this method is that it prevents the occurrence of sudden large vari-
ations in m, and consequently, in the actuator. If the tune-up parameters are well adjusted, it allows to
avoid Windup31, and therefore, keeps m within values with physical meaning.
2.3 Hardware Solution
Embedded solutions such as, microcontrollers, are today a powerful choice for the implementation of
control systems, especially when combined with computers that can perform high level tasks. Microcon-
trollers are programmable units that, apart from a CPU and RAM and EEPROM memory storage units,
are equipped with multichannel ADC data acquisition modules, digital Input/Output (I/O) ports, serial
communication controller, interrupt controller, hardware timers, among others features31;34. The devices
usually work on boards that contain the peripheral support, fundamental to implement the desired tasks:
power supply, I/O connections, transducers and actuators, power drivers to control other applications
and communication drivers. It also usually provides a clock source with considerably higher frequency
(MHz) than the internal oscillator of the microcontroller itself (kHz). The boards can be developed as
general purpose "development boards" or designed to maximize the device performance for very specific
solutions. Microcontroller based board units can work alone or communicate as nodes in a computer
network to create a control system in a variety of configurations31.
The dsPICnode V3.0, developed at IPFN-IST/EUROATOM35, was designed as a general purpose
board, or node, being able to accommodate Microchip dsPIC30 family microcontrollers: models 30F4011
and 30F401336. Depending on the model used, the board becomes more suitable for motor control and
power conversion for the first model, whereas the second is more suitable for general purpose applica-
tions. The devices are both 16-bit Digital Signal Controllers (DSC) and therefore, integrate the control
attributes of a Microcontroller (MCU) with the capabilities of a Digital Signal Processor (DSP)36. The
MCUs are equipped with Input Capture (Ic), Output Compare (Oc) and ADC modules, digital I/O pins,
and UART, SPI, I2C and CAN communication modules. The board provides all the necessary support
for the MCU features: power regulation, motor/actuators drivers, MCU programmer’s interface, I/O pin
interface and drivers for RS232, RS485 and Optical communication via the UART bus. The node is
physically compliant with Eurocard form factor with a square footprint layout of 100mm35. The wide con-
nectivity can be used, apart from internode and node-to-computer communication, to control peripherals
as pressures sensors, relay boards, interface panels, and even devices that require sensor/actuator ca-
19

pabilities.
Figure 2.2: Assembled dsPICnode V3.0 board with a 30F4013 microcontroller.
Microchip provides a complete programing environment with code compilers and several manuals
that allow the user to program the MCU with C programing language under certain specific constrains
due to the MUC own characteristics36. C is a well established programming language that can be used
both for computer and microcontrollers software programing. Therefore, there is a certain added value
of using this programing language37.
Xilinx and Altera development boards, based on field-programmable gate array (FPGA) units, are
also a possible solution. These are configured with hardware description language (HDL) and the
boards have a complete set of interface peripherals38;39. Unlike MCUs, FPGAs allow parallel execu-
tion, thus providing a powerful alternative to the first solution. Manufacturers like Siemens provide high
end solutions as the Siemens SIMATIC PLC control system40 that offers top-level performance, flexibility
and functionality for controlling complex industrial environments41. National Instruments provides hard-
ware solutions for sensing and actuation that are compliant with eachother42, allowing for integration in
a control system43.
Nevertheless, the performance and viability comparison between these options must take into ac-
count the cost of each solution and the desired level of performance for the specific case under study.
From the solutions presented above and taking into account all the mentioned characteristics, the dsPIC-
node V3.0 has the most adequate performance-cost ratio for the development of the control system for
the beam-plasma experiment, therefore being the best choice. It provides all the essential characteris-
tics for RTCs implementation and, comparatively, the cost is lower that the other options. Therefore, it
constitutes a cost-effective process unit for the control system.
20

2.4 Software Solution
The Human-Computer Interface (HCI) requires an environment that allows the human user to interact
with the control system. This can be achieved through a computer terminal. A control system can
be designed using several smaller units, or nodes, distributed through the controlled environment, i.e.
distributed control system31;33, performing specific process tasks and connected to a computer that gives
supervisory control to the user. In this case, having a high level graphical interface is a very powerful tool
since it improves significantly the user experience and allows for a clearer monitoring of the variables
and parameters through virtual control panels. In the market there are several tools and platforms for
this specific propose.
The e-lab44 is a framework for control and operation of remote experiments developed at IST45,
falling in the scope of the Remote Controlled Laboratory (RCL) technologies for Interactive Experi-
ments46. It has been in operation since 200147. At the present, it allows remote users to drive 19
experiments through the internet on a "first-come, first-served" principle (FCFS). The user can control
the experiment parameters and retrieve the experimental results via the same framework. Video feed
is also available so the user can have a more authentic contact with the experimental environment and
set-up. Due to these characteristics, e-lab is a suitable platform for operating interactive or real-time
experiments45;47;46.
Figure 2.3: Complete e-lab framework architecture. The Beam-Plasma apparatus (Experimental Apparatus) is connected to theReC through the control and acquisition hardware (Hardware Controller). Form reference 45.
The framework (Figure 2.3) provides a fully integrated software platform, from the interfacing with
the experiment CODAC hardware to the remote user end. e-lab relies mainly on ReC48, the Remote
experiment Control, which is a software framework in a client-server approach47. It allows the integration
of the services and tools provided by the platform and manages the simultaneous multi-client connection
to a multi-experiment laboratory, being based on standards like Java47;49. ReC50 is divided in three
major units: the Hardware Server, the MultiCastController and the Hardware Client. The Hardware
Sever is responsible for the communication between the hardware drivers and the transmission of data
21

to the MultiCastController. The later is responsible for distinct instantiations and expositions of Hardware
Servers and their access in a controlled, secure and coordinated manner with the client side. Finally,
the HardwareClient manages the communication with the MultiCastController, the integration of different
graphic interfaces for configuration and the presentation of data in a common and coherent interface47.
The graphical user interface (GUI) is also developed with Java and can be specifically adapted for each
experimental apparatus47. On the user end, e-lab can run on any desktop platform since the interface
is made through an application based on Java (Figure 2.4). The framework was designed so it can be
integrated easily with any legacy code or receive upgrades. It also can work on any platform: Unix and
Linux, Solaris, Microsoft Windows and Mac OSX47.
Figure 2.4: Example of an experiment GUI on e-lab framework, "Ondas estacionárias e velociade do som experiment".
Besides e-lab, other possible solutions were taken under analysis. The Experimental Physics and
Industrial Control System (EPICS) is a software platform that comprises a wide variety of tools appro-
priate to the control of large and complex distributed systems51. This platform has been successfully
used in large scientific experiments such as, particle accelerators52 and fusion machines53;54;55. The
control platform uses Client/Server and Publishing/Subscribe techniques to communicate through the
control network. The real-world I/O and local control tasks are performed by the Input/Output Con-
trollers (IOCs), while the Channel Access (CA) protocol makes the data available through the network.
The data is stored in variables named Process Variables (PV). This platform is programed using the
C++ programing language. The system architecture was designed to be reliable, maintainable, easily
upgraded and since 2004 it is possible to run the IOCs on Linux, MS Windows and Mac OSX, among
other operative systems51. EPICS can be connected with other platforms that provide a GUI or the
appropriate tools to build one. A possible solution is the Control System Studio (CSS). This software
platform provides a collection of tools to monitor and operate large scale control systems56. It is based
on Eclipse and resulted from the collaboration between different laboratories and universities56;57.
22

Both Siemens SIMATIC PLC40 and National Instruments LabVIEW58 also provide powerful solutions
for system monitoring, GUI and control but again, due to cost-effectiveness reasons, these options
become unsuitable for this specific purpose. Moreover, these software solutions are adjusted to the
already discarded providers proprietary hardware.
Given the considerations previously stated regarding the hardware and the interface needs for a
distributed control system, the e-lab framework presents itself as the most adequate choice. It pro-
vides powerful control and graphic environment tools and the combination allows to achieve the desired
characteristics for the control system with proven results and expansion potential.
23

Chapter 3
The Beam-Plasma Interaction
Experiment
The Beam-Plasma apparatus upgrade was conducted under the scope of making the machine com-
pliant with the most recent control and data acquisition techniques and, at the same time, preserve and
maintain the original integrity of the setup. It provides an unique perspective over the initial constructions
methods of plasma physics apparatus with and on how to apply new technologies into their operation.
3.1 General Scope
The cross-section schematic can be observed on Figure 3.1. The apparatus is centered on a cylin-
drical steel chamber with seven observation hatches, 64.0±0.1cm long and 4.1±0.1cm inner radius.
There, a low pressure helium gas interacts with a low energy electron beam, creating a low temperature
plasma. The chamber is equipped with two Langmuir probes: one fixed probe and one movable probe.
The fixed probe is placed vertically and fixed to the chamber wall. The fixed probe positioner allows
to adjust the penetration depth into the plasma column. On the other hand, the movable probe has
fixed penetration depth but can be moved across the length of the interaction chamber. The holder of
this probe slides on two horizontal rails, allowing to perform measurements in different positions. The
injection of gas is also made near the left side of this section through an injection nozzle.
Globally, the structure can be divided into five fundamental sections, connected in chain but electri-
cally isolated through Bakelite rings and rubber seals.
On the left, according to the presented schematic, is the electron gun that generates the electron
beam. During operation this section is at an electric potential of -2kV and for this reason it is isolated from
the remaining structure of the experiment. It can be divided into two parts: the inner filament holder and
the shielded cylindrical cup where it is inserted. Between the electron gun and the interaction chamber
lies the electromagnetic resonant cavity, placed inside a cylindrical steel section with the same radius
as the interaction chamber but only 21±0.1 cm long. On the right of the interaction chamber lie two
24

sections. The first holds the pulley system of the movable probe cables and the vacuum measurement
gauge while the second on the far right end, contains the electrostatic energy collector and the turbo-
molecular vacuum pump. Additionally, the latter is directly attached to the apparatus steel support frame.
A set of ten coils, equally displaced and aligned, surround the hole interaction path in order to create an
homogeneous6 magnetic field. Alongside, there is a quadrupole visible on Figure 1.2 which allows to
correct any misalignment between beam and interaction chamber. The described parts are connected
together and stand on a steel bed composed by two rails bolted to the holding structure frame.
The present chapter documents the construction and operation details of the setup as well as the
changes implemented during the upgrade.
3.2 Vacuum System
Achieving high vacuum and maintaining a stable low pressure regime was one of the main challenges
presented by the upgrade process conducted on this apparatus. The original system was upgraded in
the late 90’s and the two oil diffusion pumps were then replaced by a Varian Turbo-V 301 Navigator
turbo-molecular pump with the exhaust connected to an EDWARDS E2M-12 rotary pump59 through a
flexible KF DN40 bellow, 1m long. During the present upgrade, several malfunctions were detected in
this configuration, leading to the implementation of crucial modifications to the vacuum pumping line.
In the first attempts to achieve high vacuum inside the interaction chamber, it was observed that
there were leaks in the vacuum line and the time needed to achieve pressures of 0.05mbar exceeded
three hours. For an apparatus with a inner volume around 15dm3 this time was largely exceeding the
manufacturer specifications for the pump. The causes were initially attributed to the deterioration of
the KF DN40 Vitton O-Rings used in the connections. Throughout the inspection, it was verified that
not only the previous assumption was correct, but also a malfunction behavior was found on the pump.
Figure 3.1: Cross section schematic of the apparatus. Based on reference 6.
25

It was leaking oil through the vacuum inlet valve and, at the same time, was unable to keep a low
pressure regime in the bellow after it was turned off. Equalization with atmospheric pressure occurred
after approximately two minutes. The rotary-bellow-turbo configuration presented two major problems.
In case of a sudden power loss during operation, there was no protection valve between the rotary and
the turbo. In a critical situation this could lead to permanent damages on the turbo as a result from fast
raising pressure over 0.1mbar and rotary oil dispersion into the rotating blades. Moreover, it was not
possible to safely inject air into the vacuum line, thus equalizing the pressure in the interaction chamber
with the atmosphere without manually breaking the connections between the line elements. The ability
to perform this is essential to conduct routine inspections.
Figure 3.2: Vacuum cut and venting valves mounted on a VAR-IAN DS102 rotary pump with a KF DN40 T connection joint. Thebellow leads to the turbo pump.
A performance test was conducted on the ro-
tary pump, leading to the conclusion that the inner
gaskets of the rotors were damaged and that only
with specific replacement parts form the manufac-
turer would be possible rehabilitate the pumping
mechanism. This lead to the option of replacing
the rotary pump with a newer VARIAN DS102 ro-
tary dual-stage pump60. The outlet port was fitted
with a PFEIFFER ONF 16 M exhaust filter to pre-
vent the expulsion of vacuum oil particles to the
surrounding atmosphere while the inlet was con-
nected with a KF40 T connection joint. This al-
lowed to connect two cut valves to the pumping
line: an EDWARDS PV25EKS vacuum cut valve
and an MECMAN 533 venting valve. The first was
placed between the T and the bellow while the
second was connected to the remaining connec-
tion of the T. This configuration allows to isolate
the turbo from the rotary and at the same time
creates a practical solution to fill the apparatus with filtered atmospheric air. The vacuum system con-
nections schematic is presented on Figure 3.3.
A thorough inspection on the apparatus itself revealed the presence of remaining oil traces from the
original diffusion pumps. The reachable inner surfaces were cleaned with isopropil alcohol as well as all
the elements in the pumping line.
The system was reassembled (Figure 3.2) and several pumping cycles were made to evaluate the
effect of these modifications. The pressure line was able to maintain low vacuum for longer periods
and no sudden pressure drops were observed after power down. The pressure regimes attained with
only rotary pumping were as low as 1.8±0.1×10−2mbar and the time necessary to reach this order of
magnitude from atmospheric pressure was reduced to approximately thirty minutes. Using the turbo-
molecular pump to reach high vacuum regimes was largely improved by these modifications, since the
26

lower initial pumping pressure for the turbo allows a larger pumping speed (150l/s)61. Pressures in the
order of 10−6mbar can now be reached in approximately thirty minutes after rotary pumping. It means
that the total time needed to set the apparatus in high vacuum conditions was drastically reduced to one
hour. These modifications successfully corrected the system malfunctions and later inspections have
reported no traces of oil leakages form the rotary after power loss. Moreover, during these events the
vacuum cut valve has correctly isolated and protected the turbo pump.
Figure 3.3: Connection schematic of the valves introduced into the vacuum system.
The introduction of the valves provided yet a supplementary capability. During power loss, the cut
valve isolates the turbo pump from the T connection through which the rotary and the venting valve are
connected, maintaining high vacuum regime inside the chamber for longer periods. Without power, the
turbo remains spinning at high speed since no active braking mode can be activated. At the same time,
the pressure inside the T increases faster than inside the chamber and if the cut valve is reopened the
pressure in the line can raise violently. By maintaining the cut valve closed, air can be injected into
the T via the vent valve, equalizing the T with the atmosphere. Then, the vent is closed and the rotary
is restarted, thus dropping the pressure below the turbo upper limit. Tests have shown that the time
needed to perform this operation is less than 5 minutes which can be justified based on the fact that the
volume of the T is considerably smaller when comparing with the pumping performance of the rotary
pump.
The turbo pump is connected to a VARIAN Turbo-V 301-AG Rack Controller which allows to drive
the pump and provides interface with the CODAC62. The driver was configured so that the pump is
operated at the minimum nominal rotation speed possible, 700Hz or 42kRPM, since it allows to reach
ultimate pressures in the order of 10−6mbar. The control of both rotary and cut valve is made by a power
relay board while the vent valve is actuated directly by the CODAC.
27

3.3 Pressure Monitoring
The pressure inside the the apparatus is presently measured with a PFEIFFER MPT100 combined
gauge head comprising two components: thermal conductivity according to Pirani and cold cathode
tube63. The absolute pressure range largely exceeds the necessary range for the experiments26, going
from 1000 to 5.0±0.1×10−9mbar, and was fitted to the apparatus via a DN40CF flange. The gauge
head electronics provide the possibility to perform measuring cycles each 40ms and to establish com-
munication via RS232 or RS485 protocols, becoming a suitable solution for CODAC integration.
The MPT100 gauge head replaced the previous EDWARDS AIM-X gauge head and controller. This
gauge needed a manufacturer unique controller to perform the conversion and communication interface.
Besides, the pressure range was comprised between 10−2 and 10−9mbar and the controller only allowed
serial communication protocol. These were key factors in the decision of replacing the gauge with a more
recent and compact solution.
Apart from this main gauge there is a supplementary PFEIFFER TPR265 compact Pirani gauge
head64 with KF DN16 fitting, connected to a RVC300 controller of the same manufacturer65. The mea-
suring range goes from 1000 to 5×10−4mbar. Although it is not connected to CODAC, it was funda-
mental to initially corroborate the measurements made during the implementation of the communication
protocol between the MPT100 head and the CODAC. This probe was also used as a reference to deter-
mine the working status of the previous gauge. The implementation of the communication protocol via
RS485 is discussed ahead.
Although the gauge head has a permanent magnetic unit for cold cathode operation, due to the
proximity (15cm) between the fitting port of the gauge and the confinement coils it was crucial to de-
termine if the induced magnetic field had any influence over the pressure readings. For pressures
of 2±0.1×10−2 and 1,5±0.1×10−5mbar the current on the coils was varied from 1±0.2 to 12±0.2A
(2,7±0.5 to 32,4±0.5mT in the center of the coils) and no significant changes on the readings were
detected. It was determined that, for this distance and field intensities, the concentration of field lines in
the gauge region is not strong enough to induce faulty readings.
Considerations regarding the gauge response to a pressure step and the calibration factors for the
helium gas are discussed along with the characterization of the gas injection system.
3.4 Gas Injection
The gas injection system presented a barrier to the utilization of the apparatus. It was composed by
a cut valve and a needle valve both manually operated, connected from the pressure regulator to the
entrance of chamber with 4/6mm inner/outer diameter gas tubes. Operation of this setup revealed that
attaining constant pressure inside the interaction chamber by manually actuating the needle valve was
a complex task.
28

Figure 3.4: Gas injection system. The gas line (blue) from thepressure regulator connects to the gas cut valve (right), followsto the proportional valve (center) and enters the interaction cham-ber through the manual security valve (top).
Although the valve was reliable and still in
good condition, frequent corrections needed to
be made to maintain the equilibrium between the
turbo pumping and the amount of gas being in-
jected. The turbo pump has a large pumping
speed when compared to the volume of the ap-
paratus and the needle valve is subject to a large
pressure gradient: 0.3±0.1bar over the atmo-
sphere on the inlet port and 10−6mbar in the out-
let. Also, the length of the tubes used was consid-
erably long making difficult to purge the gas line
of air.
Nevertheless, the configuration of the gas line
components was found to be adequate for the
needs of the experiment. With the upgrade pro-
cess, all elements were replaced with exception
of the manual security valve, fitted to the cham-
ber inlet port (Figure 3.4). Both gas bottle and
pressure regulator used are from AIR LIQUIDE.
According to the supplier, the gas was helium with a purity grade N55, fed to the gas line through a
GA2 pressure regulator. The gas line was implemented with TECALEMIT C98 flexible tube, inner/outer
diameter of 4/6mm and 3.2m long, and the connections with conic cooper fittings. The manual valves
were replaced by two electrically actuated valves: an EDWARDS TAV5 as cut valve, fitted with a FESTO
MSFG-12 12V DC solenoid, followed by an MKS248A proportional valve66, since both allow direct inte-
gration into the CODAC. The proportional valve output was then connected to the manual security valve.
These connections can be observed on the schematic present on Figure 3.5.
Figure 3.5: Schematic of the helium gas injection system.
The choice of the proportional valve was based on its specifications: this model is actuated with a
0 to 5V DC tension, presents good linearity relation between the applied tension and the aperture of
29

the valve and the current on the solenoid does not exceeds 60mA when fully opened. Again, a series
of tests were conducted to verify the correct operation of the valves as well as characterize the overall
of the gas injection process. The impedance of the solenoids was measured with a Digimess 200 RLC
meter and the results are displayed on Table 3.1. These parameters were used in the design of the
respective electronic control modules integrated into the CODAC.
Figure 3.6: Plot of pressure as function of the proportional valve aperture for a gas line pressure of 0.3bar over atmosphericpressure.
In order to calibrate the proportional valve, the gas line was filled with gas and purged using the
rotary pump to remove any air present. Then, the valve was closed, the gas line refilled with a pressure
of 0.3bar over the atmospheric pressure and the rotary was left pumping. The MKS248A presents
a tuneup screw that allows to regulate the leakage of the valve pinhole. By using this mechanism it
became possible to adjust the valve linear working range, thus minimizing the gas leakage and achieving
lower pumping pressures. After the tuneup, the final pressure achieved was of 1.8±0.1×10−2 mbar with
no pressure loss on the gas line. Finally, the turbo pump was started and the screw was re-tuned,
registering final pressures of 8±0.1×10−6 mbar. Notice that the calibration process was done with the
valve placed at its final position and location on the apparatus structure. This was done to ensure that
the process was as precise as possible. In Figure 3.6, the correlation between the aperture of the
proportional valve and the pressure inside the interaction chamber indicates that the pressure range of
10−4mbar is attained for valve apertures between 65% and 70%.
Table 3.1: Resistance and inductance of the gas valves solenoids.
Solenoid MKS248A MSFG-12R (Ω) 90.6±0.1 324±1
L (mH) 445±1 386±1
Integrating a PID control algorithm to manage and maintain a desired pressure level inside apparatus
would be a considerable improvement. To evaluate the possibility of doing so, the vacuum gauge was
submitted to pressure step tests in order do determine lag between actuation on the valve and the
30

sensing of the measuring head. The two most significant cases are present on Figure 3.7 in intervals of
75ms between each acquisition. It can be observed that in the first step with 40 to 70% of valve aperture,
the pressure goes form 2.6±0.1×10−5 to 1.6±0.1×10−2 mbar, crossing the 4.4±0.1×10−3mbar area
marked on the plot as Transition. These series of measurements with same pressure were also observed
in this region on other step tests in similar conditions. This plateau presents itself again when the
turbo pump is started and the pressure drops, crossing this region at similar speed. The cause for
this unexpected phenomena was attributed to the fact that the MPT100 is a combined gauge head
comprising two components, corresponding this plateau to the transition between the Pirani and the
cold cathode, automatically managed by the gauge electronics. On the second step with 10 to 70% of
valve aperture, the pressure goes form 9.3±0.1×10−6 to 2.6±0.1×10−3 mbar and the plateau region is
no longer found. This is supported by both the previous hypothesis and other step tests with the same
aperture limit.
Although it would be possible to account for this plateau in the PID algorithm, after a thorough dis-
cussion it was decided that the implementation would only cover pressures bellow this limit. The desired
pressure range for the experiments is comprised in the 10−4mbar range26 which implies the use of
the turbo pump. Maintaining pressures above 10−3mbar with the turbo pump pumping requires steady
rate injection of large quantities of gas, thus largely increasing the operating costs of the apparatus.
The hypothesis of implementing a secondary algorithm to work with the rotary pump at pressures from
2±0.1×10−2 to 6±0.1×10−2mbar was also considered. The tests carried out have shown that, since
these values are very close to the lower pumping limit of the rotary, it is easier to actuate over the valve
through the CODAC and adjust it to achieve the desired pressure.
Figure 3.7: Step response of the MPT100 gauge to MKS248A valve aperture steps: 40-77% and 10-70% (acquisition intervals of75ms). It is possible to notice the transition between the dual gauge measuring elements (Transition).
By analyzing the 10-70% step response it was possible to determine the delay L between actuation
over the valve and the gauge sensing, as well as the slope R of the raising pressure, used to determine
the PID parameters. The cold cathode element presents a logarithmic relation between the pressure
31

and the voltage measured on the element67: V∝log10p. Since the pressure range for the PID falls into
the working range of this element it is fundamental to take the previous relation into account. Therefore,
the R and L parameters were determined by linear fit with the pressure axis in logarithmic scale. The
plot fitting is present of Figure 3.8 and the derived PID parameters on Table 3.2.
Figure 3.8: Linear fit to determine the pressure variation slope as a response to the valve aperture step as well as the responsedelay. These were used to calculate the PID parameters. The data used is the same as in the 10-70% step of the plot on Figure3.7.
The PID parameters were derived based on the standard Ziegler-Nichols relations31 for a step re-
sponse and consequently, the k1, k2 and k3 parameters of the velocity algorithm (Eq. (2.4)). These are
also present on table 3.2. The units of R were converted to mPa/s in order to simplify the implementation
of the algorithm at hardware level. However, it implies no change from the user point of view.
Table 3.2: Derived PID parameters.
R (mPa/ms) L (ms) Ts (ms)250 375 2000Kp Ti Td
0.0189 750.0 187.5k1 k2 k3
0.0710 -0.0224 0.0018
For this pressure range it was observed that in order to obtain consistent pressure readings was bet-
ter to let the pressure become stable after changing the valve aperture. This settling time was between
one and two seconds, thus justifying the reason for the long Ts time. A different alternative was also
superficially tested. It consisted on using the average of the pressures measured between PID cycles
in order to attain a more reliable pressure value. Preliminary results showed that the pressure oscillated
around the defined set-points without becoming stable. Nevertheless, it would be interesting in the fu-
ture to test the performance of this last technique but with a weighted FILO (First In, Last Out) average
instead. The experimental results obtained with the implementation of the velocity algorithm and using
32

the derived parameters can be observed on Figure 3.9. The curves correspond to the time evolution of
the pressure to the specified set-points as a result of the PID control.
Figure 3.9: Plot of the pressure controlled by the implemented PID algorithm for five different set-points.
The PID was able set the pressure inside the apparatus to the desired set-points. It can be observed
that the final steady-state errors fall within the ±25% band of measurement uncertainty of the gauge
head63. Furthermore, since the time-scales of the apparatus are in the order of minutes, a PID with
settling times in that same order can be considered satisfactory. Additionally, it can be observed that the
settling time increases as the pressure set-points decrease. For higher set-points and considering the
same start pressure, the initial error entering the PID algorithm is larger than for lower set-points, which
given the pressure-valve aperture characteristic (Figure 3.6) accounts for the different settling times.
To set the pressure to values outside the PID operation range, it is still possible to manually operate
the proportional valve through the CODAC interface. Since the signal that actuates over the valve has
a resolution of 0.04±0.001%, the operation can be carried out with very satisfactory results. Specific
aspects regarding the integration of the previous systems into the CODAC are further explained ahead.
3.5 Electron Gun
The electron gun used in this apparatus consists on a hot filament made of tungsten wire with a
diameter of 0.98±0.01mm. According to the manufacturer, the wire is 99.95% tungsten (W) with traces
of molybdenum (Mo). The components that constitute the electron gun are displayed on Figure 3.10.
The tungsten wire is bent with a shape similar to a parabola and the top area with major curvature
is pruned until the width is half the initial. It is done so that the emission of electrons is concentrated
in this area. The filament is mounted on an holder that acts both for support and positioning. The two
33

rods where the filament is bolted are fixed to the base through sliding vacuum seals and a screwed
ring. Rotating the screw makes the filament to go forward and reverse along the rods guides. The
mechanism allows to adjust the position of the filament even when the apparatus is working and also
provides connections for the cooling of the electron gun with distilled water. It is fitted onto the filament
cup (Figure 3.10(c)) that provides shielding to the filament and acceleration to the electrons. The inner
side of the cup is cylindrical with a graphite cone placed at the top end (Figure 3.10(b)). Since the cup
is at the same potential as the filament and holder, the shielding created protects the filament against
bending caused by the confinement coils magnetic field. It is fundamental to guarantee that the filament
tip is properly aligned with the 4±0.1mm diameter pinhole. The cup is flowed by three metallic discs
with openings aligned with the pinhole. The first and second are called grids one and two and the
remaining as plate. These acceleration disks are electrically isolated for the cup with three, axially
displayed ceramic rods and spacers. They have individual connections to the outside of the cup (Figure
3.10(c) and (d)) to allow the application of acceleration potentials. When in operation these are usually
connected to the apparatus ground potential while the filament and cup are at -2kV. Again, since the
walls of the cup are at the same potential, the electrons are channeled through the pinhole, following the
path to the region where the potential is higher. The stream of expelled electrons, accelerated by the
potential and aligned by the disks create the beam of electrons.
Figure 3.10: View of the components that constitute the electron gun: (a) - Tungsten filament placed at the holder; (b) - Inner viewof the cup; (c) - Side view of the filament cup. The acceleration plates are electrically isolated from the cup by three ceramic rods;(d) - Electron gun fitted to the apparatus. The gun is cooled with distillate water in a closed fluid circuit. The cables connected tothe plates and filament are also visible.
The electron gun uses two external power supplies: a FLUKE415B68 which provides the -2kV electric
34

potential at a maximum current of 30mA and a current source that supplies the heating current for the
filament and is capable of providing currents over 50A. The heating current goes through the filament
wire, in vacuum, making it incandescent and capable of emitting electrons. The source is manually
operated and the current values used lie between 25 and 40A. These values, measured on the source
ammeter, were crosschecked with a AC/DC Clamp Meter ST-337. Moreover, the high voltage supply
is connected to the filament through the circuit of the current source. Since the ejected electrons are
at -2kV, the electron current of the beam can be determined by measuring the current that flows from
the high voltage supply to the filament. This is done with a insulated YOKOGAWA YEW 2011 ammeter
placed on the connection between sources.
During the inspection to the electron gun, it was detected that the filament was in need of being
replaced due to oxidation and to the long time of operation is had been submitted to. A new filament
was made replicating the characteristics of the previous one. It was placed in position and consequently
both focus and alignment were re-adjusted. For safety reasons, the electrical connections of the cup
were also rewired and the electrical insulation between disks and cup verified. A through inspection
was conducted on the heating current source and although being more than forty ears old is remains
in perfect condition. The high voltage source was also inspected and only the BNC cable that feds
HV to the filament through the high current source was replaced. At the same time, the electron gun
ground and filament cables were maintained since no malfunction was detected. Besides, no cooling
system was present on the electron gun, therefore a solution based on a plastic water container of 5l,
connected to an EHEIM 1048A submersible pump was implemented. The water circuit is closed so that
the pumped water that goes to the electron gun returns to the container. A Parker DFC flowmeter69,
connected to the CODAC, was introduced between the container and the pump to monitor the flow and
an air filter was fitted to the container for venting purposes. The container was filled with 4±0.1l of
distilled water (<30µS/cm) and the 3/8" plastic flexible tube, 2.2±0.1m total length, was purged. No
leakage or air formation inside the tubes was detected. It is fundamental to monitor the coolant flow in
the electron gun since overheating can permanently damage the filament, the vacuum seals or even the
positioning mechanism. Finally, the cooling system was carefully isolated from the work bench, since
during operation the filament is at a potential of -2kV. Operation tests showed that the cooling system
was working properly with no over heating of neither water container or gun. Also, no sparks were
registered on the gun inner connections and both heating and electron currents were in the expected
range.
Neither of the power sources are at the present controlled by the CODAC, except through the power
relay board, since a future replacement of these units is being taken under account. Although no mal-
functions were detected, neither of the sources allow direct integration on a more advanced operation
system. Moreover, these are sensitive equipments and account for many years of operation. Although
it would be possible to control the sources with the introduction of actuators and sensors, the amount of
effort implied could be in future directed to the design of new units, compliant with the present CODAC
architecture.
35

3.6 Electrostatic Collector
At the right end of the interaction chamber, there is an electrostatic collector aligned with the appara-
tus axis and therefore with the pinhole of the electron gun. The electron beam interacts with the helium
gas across the apparatus length terminating its path at the surface of the collector. On Figure 3.11 is
displayed the head of the collector (a) and the structure that holds the collector in position (b). In the
detail, it is possible to observe that the sensor is constituted by two elements: a central circular disk and
a secondary ring. These two detection areas produce an output signal proportional to the amount of
charge deposited by the beam electrons.
Figure 3.11: Model representation of the electrostatic collector: (a) - Collector head detail; (b) - Collector mounted on the supporttube and top end flange.
Although the collector presents two detection areas these were found to be connected to the same
output BNC connector. During the upgrade process it was not possible to change these connections
since the apparatus did not had another available output to pass the signal, and modifying the existing
support flange could permanently corrupt the ability to achieve high vacuum. Nevertheless the signal is
connected to the CODAC using the single BNC connection. Another problem was detected during the
inspection. The tube that holds the collector in position was excessively long, thus the collector head
was placed into the motion range of the movable probe. This situation was corrected by reducing the
length of the holding tube to 29±0.1cm. The detection surface is now located over the gears of the
movable probe mechanism, preventing the possibility of collision or interfering with the probe motion.
This detector was also used during the experimental process to detect and correct the miss alignment
of the beam.
3.7 Confinement Coils and Quadrupole
The apparatus is equipped with a set of ten coils that provide magnetic confinement to the plasma,
connected in series and equally placed along the apparatus to provide an homogeneous magnetic
field, from the electron gun to the right end of the interaction chamber (Figure 3.12). The coils are
180/350±1mm inner/outer diameter and 70±1mm wide. The intensity of the field created by those is
2,7mT/A at the axis26. An HP 6274B DC power supply, operated as a current source, provides up to
60V and 15A according to manufacturer specifications70. Although the current used does not exceed
6A under normal operation conditions, the power supply was tested up to 12A without any malfunctions
36

being detected. The connections between coils and from the coils to the supply were rewired. The set
has three rods, parallel to the axis and equally spaced, which enable to adjust the spacing between coils
and maintain the alignment with the interaction chamber. The resistance measured on the set of coils
was 5.7±0.1Ω and the inductance 45.6±0.1mH.
Figure 3.12: Rear view of the apparatus. The confinement coils placed form the electron gun to the end of the interaction chamberin order to provide an homogeneous magnetic field across the experiment. It is also possible to observe part of the quadrupole .
The quadrupole consists on two rectangular shaped coils aligned with the beam axis but perpendicu-
lar to the confinement coils (Figure 1.2 and partially on 3.12). They are operated with a LEYBOLD 52155
power supply as current source. The two coils make an angle of approximately 80±5o between them
and are held into position by the metallic frame of the apparatus. During operation, it was determined
that the current applied on the quadrupole to properly align the beam with the chamber axis is 6A, using
only the vertical coil of the quadrupole. This coil presented 2.9±0.1Ω and 6.0±0.1mH.
None of these power supplies allow integration into the CODAC. At the present, both currents have
to be manually adjusted by the user, similarly to those used with the electron gun. For similar reasons,
these units were not replaced during the present upgrade.
3.8 Fixed Langmuir Probe
As previously mentioned, the apparatus is equipped with a vertical fixed Langmuir probe (Figure
3.13) on the top of the interaction chamber. The tungsten wire is 15±0.1mm long and 0.3±0.1mm
diameter. It is attached to a mechanical positioner which allows to regulate the insertion depth. This is
achieved through a vacuum bellow attached to a hollow screw spindle. The probe is connected to the
output BNC through a shielded copper conductor with a configuration similar to a coaxial cable. This
tube is fitted with epoxy seals inside a steel cylindrical jacket to improve rigidity and guarantee optimal
alignment between the probe and the positioner. The jacket, placed inside the bellow (Figure 3.13 (b)),
is vacuum sealed on the bellow-spindle junction with a conic rubber gasket. Since the nut is axially
fixed to the frame, rotating it makes the screw spindle move up or down and consequently changing the
position of the probe. Also, the base of the positioner has a pivot which allows for the change the angle
of the probe while two screw bolts on the sides maintain the desired level inclination. Moreover, the base
37

of the positioner seals the bellow to the port of the chamber with a Viton O-Ring.
Figure 3.13: Fixed Langmuir probe positioner: (a) - Manually adjustable positioner with probe; (b) - Inner view of the inside of thepositioner where the below and probe jacket are visible.
During the inspection process on this device it was found that the mechanism of the positioner was
in excellent working conditions. The probe wire was realigned and all the sealants were checked. It was
verified that the electric contact between the probe shielding and the positioner frame was not adequate
due to the conic gasket and the gap between the jacket and the hollow screw spindle. A copper wire
was added connecting these two elements to ensure that the interaction chamber and probe shield
are at the same potential. Moreover, an extra conductor was introduced to connect these to ground of
the apparatus frame. No leaks were detected when operating the positioner with the chamber in high
vacuum regime.
3.9 Movable Langmuir Probe
Apart from the fixed probe there is also a movable probe with the same dimensions but with no depth
variation. Instead, this probe can be moved across the length of the interaction chamber. On Figure
3.14 (a) it is possible to observe the inner side of the chamber. The probe holder slides on two parallel
rails, held in position at both ends of the chamber. It is fixed to a steel cable under tension which allows
for the movement of the the probe back and forward on the rails. Both ends of the cable are winded on
two separate pulleys, fixed to the motion drive shaft, but on opposite directions. At the left end, there
is also a return sheave placed horizontally. The cable winded to one pulley, goes through the tension
mechanism, across the chamber and is fixed to the probe holder. Then, the cable goes around the return
sheave, crosses back the chamber and is rewind into the other pulley. This means that when the drive
shaft is rotated, one end of the cable is winded while the other is re-winded, thus maintaining the length
of unwinded cable. Rotating the shaft clockwise makes the probe move to the right and vice versa. The
connection of the probe to the outside is assured with a coaxial cable. This is kept under tension by
using a weight which slides inside a steel tube placed vertically. This tube is located under the pulleys of
the traction system. The coaxial goes from the probe directly to the traction mechanism where instead
of being winded, passes over the pulleys and goes down the vertical steel tube. It makes one turn on
the weights sheave and follows back up the tube where the BNC connector is located.
Although this mechanism constitutes one of the most delicate and difficult to access in the hole
apparatus, it was decided that a thorough inspection needed to be conducted which resulted in the
38

Figure 3.14: Movable Langmuir probe: (a) - Inner view of the interaction chamber seen from the electron gun side. The probeholder slides along the chamber over two parallel rails, fixed on both ends of the chamber section; (b) - Movable probe mountedon the sliding support during the process of cable replacement and cable mechanism re-adjustment.
introduction of several modifications. The steel cable was replaced since it presented visible signs of
corrosion and fractures. LINEA EFFE coated steel cable, 0.5±0.1mm diameter and 2±0.01m long,
was employed, followed by the recalibration and alignment of the entire traction system. Alongside, the
coaxial cable was verified to ensure perfect connection between the probe wire and the output BNC plug.
The original motor and position monitoring board were obsolete and could not be efficiently integrated
into the CODAC system. The AC motor was also overpowered for the needs of the apparatus. Moreover,
its gearbox frame was designed for this motor, making it difficult to use with a different unit. Taking into
account the needs of the apparatus, a new motor and gearbox system was designed and implemented
(Figure 3.15 (b)). This new gearbox has a ratio of 400:1 and the motor is operated at 12VDC. Tests have
shown that the implemented solution provides optimal speed for the motion of the probe and keeps the
current on the motor below 200mA. In order to track the position of the probe two sensing devices were
implemented. An HP HEDS 5700 rotating optical encoder71 was attached to the drive shaft (Figure 3.15
(a)), providing a resolution of 512 positions per revolution. After calibration, the relation between probe
displacement and rotation was found to be 0.192±0.001mm per encoder unit. Consequently, the probe
moves inside the chamber at a maximum speed of approximately 4.5mm/s.
Figure 3.15: Traction mechanism of the movable probe system: (a) - View of the section which holds the cable mechanism (inside).The cables are winded on the drive shaft pulleys. Below, there is a steel tube with a weight that maintains the probes coaxial cableunder tension. The position encoder (blue) connected to the drive shaft and the head of the electrostatic collector are also visible;(b) - DC motor and reduction gears connected to the drive shaft.
39

Besides the encoder, a reed relay was placed outside the steel tube where the coaxial cable weight
slides. A small permanent magnet was fitted to the weight so the reed becomes active when in proximity
with the magnet. Reed relays present hysteresis and this characteristic was taken into account during
the calibration process. Since the reed was used to mark the alignment of the two probes, these were
set in position while the reed was placed on the side of the tube and aligned with it. The reed was
moved upwards along the length of the tube until it became activated due to the proximity with the
magnet. Under this configuration, when the movable probe slides to the right, the reed is activated when
the probes become aligned. The alignment of the probes is also used to mark the reference zero of
the interaction chamber. The combination reed-encoder proved to be a safe and accurate method for
determining the position of the movable probe inside the chamber. Besides, it was also determined that
the optimal range for probe sweeping is comprised between positions -800 and +800 on encoder units,
thus 307.4±0.2mm of total range. This interval is justified based on the fact that sending the movable
probe near extreme positions creates unnecessary risks such as misalignment of the cables or even
collision. Moreover, this interval comprises all the relevant physical characteristics which are studied
with the movable probe.
All of the implemented changes were tested under high vacuum and no leaks were detected during
operation. Motor, encoder and reed relay were consequently integrated into the CODAC. These choices
have proven to be reliable and allow to correctly operate the movable probe without any direct contact
with the apparatus.
3.10 Resonant Cavity
The cylindrical resonant cavity is located in the section between the electron gun and the interaction
chamber (Figure 3.16(a)). It is made with a copper hollow cylinder with inner and outer radius of 32 and
40mm respectively. The inner length of the cavity is 50mm and is closed at both ends with two circular
disks of the same material26. Each disk presents a circular hole with 5mm radius so that the beam can
pass through the cavity26.
Figure 3.16: : (a) - Electron gun cup mounted on the section which contains the resonant cavity. On the side of the section it ispossible to observe the port for antenna insertion; (b) - Loop antenna used in the resonant cavity mounted on the positioner.
40

On the sides there are two circular ports aligned with the center of the cavity through where the
antennas are introduced. These single loop antennas are used to stimulate the cavity with a RF signal
on one side and pick the signal that propagates along the wall of the cavity on the opposite. In Figure
3.16(b) it is possible to observe one of the antennas mounted at the respective positioner. Besides
providing support it also has two screw bolts which permit to adjust the insertion depth of the antenna
inside the cavity. A Viton O-Ring is fitted on the positioner, thus creating a vacuum seal on the port-
positioner interface. The positioners have BNC plugs to connect the antennas to the RF electronic
equipment.
The inspection conducted on this section revealed that the resonant cavity was in perfect condition.
Moreover, the vacuum seals were also verified and only the alignment and insertion depth of the loop
antennas needed to be adjusted. This was achieved using the RF equipment described in the next
chapter, resulting in a maximization of the transmitted power at resonance frequency.
41

Chapter 4
The CODAC
4.1 CODAC Architecture and Integration
The CODAC system implemented during the upgrade process can be divided into three major units:
the local-host, the control and the acquisition boards. The system was designed under the scope that
both boards can work and communicate separately with the host (Figure 4.2). Both are integrated into
a 3U 19-inch rack, presented on Figure 4.1 where it is possible to observe the complete set frontal
connections.
Figure 4.1: CODAC integration on a 3U 19-inch Rack. From left to the right: local-host, control board, acquisition board, BNCpanel and turbo pump driver.
The local-host is based on a MSI MS-9832 ITX motherboard72, with a SanDisk 60GB SDD disk, 2GB
DDR2 RAM and a 250W ATX power supply. It runs the CentOS 6.5-x386 Linux operative system73 and
constitutes the central unit of the CODAC. This motherboard provides a compact solution for hosting the
system with all the necessary interfaces. The serial ports allow to establish serial communication with
the two boards via RS232 protocol. Moreover, the Ethernet port enables to make the CODAC available
through the network. This means that the apparatus can be operated either locally, using the host as
a standalone desktop computer, or through the internet. All the usual desktop connections are made
available through the front frame shield of the local-host (left panel). The ATX power supply is also used
42

to supply both control and acquisition boards and consequently all actuators and sensors. The rotating
key switch is used to turn on the power supply. The boards can be independently turned on or off via the
three toggle switches present of the front shield. Thus, starting the local-host does not imply the start of
the boards.
The front panel is similar for both boards: a power indicator LED (red), two press switches (black for
function and red for reset), four indication LEDs (green), one DB9 connector for serial communication
and a RJ11 connector for microcontroller firmware upgrades. These are vertically mounted on the Rack
slots using 3U 6HP aluminum panels. All the connections, with exception of the RF diagnostics, are
connected to the back panel of the boards. Instead, the acquisition inputs for the RF diagnostics are
located on the front panel via a series of eight BNC connectors, linked to the acquisition board back
plane. Finally, at the right, is located the driver of the turbo pump. Bellow this driver, is the auxiliary
vacuum gauge controller. As previously explained, this vacuum gauge is not connected to the CODAC.
Figure 4.2: CODAC integration schematic. Both boards can work and communicate separately with the local-host via RS232communication protocol.
Each board has a specific set of assigned functions and responds directly to the host. In this appara-
tus, the control board performs the following tasks: pressure measurement, control of gas injection and
valves, vacuum pumps, movable probe positioning, electron gun coolant flow and power relay board. It
already has control I/Os for the future implementation of DC-DC converters for confinement coils and
filament. The power relay board is used for both rotary and turbo pumps, water pump, vacuum cut valve,
high voltage and current power supplies. On the other hand, the acquisition board is oriented to acquire
the signals related to the apparatus diagnostics: Resonant cavity transmitted, reflected and incident
signals, interferometry mixed signal and electrostatic collector signal. Besides, it also has a control line
for a secondary relay board to power on/of the RF and diagnostic equipments. The block diagrams for
each board are presented in Figure 4.4.
4.2 Control and Data Acquisition Electronics
Both control and acquisition boards, illustrated on Figure 4.3, are based on dsPICnode V3.0 develop-
ment boards with Microchip dsPIC30F4011 and dsPIC30F4013 microcontrollers, respectively. For each
board it was developed an EUROCARD expansion shield, 100mm wide and 130mm long, containing
the specific control and acquisition electronics . The connection between dsPICnode and shield is made
43

through a DIN96 connector and the power supply via MOLEX connectors located at the shields back
panel. With exception of the fiber optic connectors, all the back panel connections are made with RJ45
connectors.
Figure 4.3: The two CODAC boards: Control board on the left and Acquisition board on the right.
Although both microcontroller models share many similar features, the reason for using different mi-
crocontrollers for control and acquisition is justified based on their specific characteristics. For instance,
the 30F4011 has the Quadrature Encoder module, useful to interface with the movable probe position
encoder. On the other hand, the 30F4013 has 12bit-ADC resolution instead of the 30F4011 10bit-ADC,
becoming a more suitable choice for the acquisition board. Both microcontrollers work at 30MIPS, using
the UART2 to establish serial communication (RS232 driver) with the host at 115200 bit/s. In the at-
tachments it is possible to observe the electric schematics of the dsPICnode V3.0 as well as the shields
developed during the upgrade process.
4.2.1 Control Board
The control board can be described according to the following characteristics:
• Power Supply - Three pin MOLEX connector with Ground, 5VDC and 12VDC;
• Pressure Monitoring - 24VDC power supply (shield DC-DC converter) and serial communication
for the MPT100 vacuum gauge (dsPIC UART1 and dsPICnode RS485 driver);
• Warning Devices - Buzzer to provide warning beeps;
• Power Control - Connection to drive one external power relay constituted by six relays (dsPICnode
ULN2803);
• Flow Monitoring - Connection with the DCF Flowmeter (dsPIC Input Capture) to monitor the elec-
tron gun coolant flow;
• Movable Probe - Control and supply of the motor (two relays), connection for the position encoder
(dsPIC Quadrature Encoder) and reference reed-relay;
44

• Turbo Pump - Interface connection with the turbo pump driver with start/stop signal and rotation
speed measurement (dsPIC ADC);
• Valves - Connection for gas cut/off and venting valves (dsPICnode ULN2803) and PWM signal to
control the opening of the proportional gas valve (dsPIC Output Compare);
• Confinement Field - Connection with PWM signal output (dsPIC Output Compare) and analog
input (dsPIC ADC) for future implementation of the confinement field current power supply;
• Filament Current - Connection with analog input (dsPIC ADC) and PWM optical fiber output (dsPIC
Output Compare and shield HFBR) for future implementation of the filament current power supply;
• Trigger Signal - Optical fiber output (shield HFBR).
Since no filament current power supply was yet implemented and the remaining I/Os of the dsPIC30F4011
have other assigned functions, the optical fiber output (shield HFBR) was used to send the trigger signal
to the acquisition board. The signal pulse is sent each time there is a change in the position encoder
and only during the interaction chamber sweep.
4.2.2 Aquisition Board
The acquisition board can be described according to the following characteristics:
• Power Supply - Four pin MOLEX connector with Ground, -12VDC, 5VDC and 12VDC;
• Warning Devices - Buzzer to provide warning beeps and external 12VDC Bulb connection (dsPIC-
node ULN2803);
• Power Control - Connection to drive one external power relay constituted by six relays (dsPICnode
ULN2803);
• Filament Current - Optical fiber input (dsPIC Input Capture and shield HFBR) for future implemen-
tation of the filament current power supply;
• CH1 - Connection for resonant cavity sweep oscillator out signal (gain 0.91V/V);
• CH2 - Connection for resonant cavity transmitted signal crystal detector output signal (gain -
194.4V/V);
• CH3 - Connection for resonant cavity reflected signal crystal detector output signal (gain -2555.6V/V);
• CH4 - Connection for resonant cavity incident signal crystal detector output signal (gain -100.0V/V);
• CH5 - Connection for interferometry mixer output signal (gain 3.2V/V);
• CH6 - Connection for electrostatic collector output signal (gain 4.7V/V);
Due to the previous considerations regarding the optical fiber output of the control board, the optical
fiber input of the acquisition board is used as the acquisition trigger signal input.
45

Figure 4.4: Bock diagrams for the control and acquisition boards of the CODAC system.
46

4.3 Microcontroller State Machine and Commands
During the present upgrade process, the communication protocol implemented in the control and
acquisition boards was based on the e-lab ReC Generic Diver50. This means that the boards are
compliant with the e-lab middleware, making it possible to further integrate this apparatus into the e-
lab platform. The high level implementation into the platform was not part of this upgrade process.
Nevertheless, it was possible to correctly operate the apparatus using the driver specific commands and
state machine. Moreover, by doing so it has been proven that it is possible to integrate the Beam-Plasma
with the e-lab mainframe installed on the local host of the CODAC.
e-lab works under the scope of pre-configurable experiments. It means that the user configures the
apparatus for a given experimental protocol and the CODAC executes the experiment autonomously.
Due to the high complexity of the apparatus, this topic was taken under serious consideration. In or-
der to provide the maximum flexibility during operation, several protocols are implemented for the same
diagnostic technique. For the specific case of the interferometry, the user can start to calibrate the align-
ment position between probes, then send the probe to the power calibration position and finally sweep
the preset range of the interaction chamber with the movable probe. These operations are performed
autonomously by the microcontroller but their execution is dependent on the user configuration and start
command. Another feature is that machine parameters can be preserved between protocols i.e. rotary
vacuum pump keeps working during interferometry protocol changes. There is a specific protocol (pro-
tocol 0) to actuate over the fundamental apparatus parameters such as gas pressure, vacuum pumps
or power relays. This implementation method aims to preserve operation flexibility and at the same
time ensure compatibility with the e-lab frame work. In Figure 4.5, it is possible to observe the state
machine implemented into the microcontrollers (a) and a communication sample between the user and
the acquisition board (b).
Figure 4.5: ReC State machine 50 implemented into the boards microcontrollers (a) and sample of the acquisition board output(b).
The state machine consists in five fundamental states and eight possible transitions between states.
The default machine state is Stopped. If an Unknown state is reached, the machine will enter the
Stopped (1) or Reseted (C) states. For a given state, the hardware sends the string "IDS \t HWID \t
47

Table 4.1: CODAC Boards Terminal I/O.
General I/OInput Output Observations
stp\n STP\n Stop command recognized;STPOK\n STOPPED state entered.
rst\n RST\n Reset command recognized;RSTOK\n RESETED state entered.
Acquisition Firmware Rev. 2.0.4 - HWID "ELAB_BPLASMA_HW02_V2.0.4"cur\n CUR\t[protocol]\t[Relay1]...
...\t[Relay6]\t[BUZZER]\t[BULB]\nReturns the current status
cfg\t[protocol]\t[Relay1]......\t[Relay6]\t[BUZZER]\t[BULB]\n
CFG\t[protocol]\t[Relay1]......\t[Relay6]\t[BUZZER]\t[BULB]\n
Configure command and param-eters recognized
CFGOK\n CONFIGURED state enteredstr\n STR\n Start command recognized
STROK\n STARTED state entered;DAT\n Data set is beginning;[CH1]\t ...[CH6]\t[pos]\t[vel]\n Data output;... Repeats while trigger signal is
received and timeout or maxi-mum number of acquisitions arenot reached;
END\n Data set has ended.Protocols
0 Change of parameters and no acquisition mode activated.1 Triggered acquisition mode activated with timeout of 180s.
Control Firmware Rev. 5.0.1 - HWID "ELAB_BPLASMA_HW01_V5.0.1"cur\n CUR\t[protocol]\t[OC1RS]\t[VG]\t
[pid]\t[pidstp]\t[turbo]\t[OC2RS]\t[OC3RS]\t[BUZZER]\t[Relay1]...\t[Relay6]\n
Returns the current status.
cfg\t[protocol]\t[OC1RS]\t[VG]\t[pid]\t[pidstp]\t[turbo]\t[OC2RS]\t[OC3RS]\t[BUZZER]\t[Relay1]...\t[Relay6]\n
CFG\t[protocol]\t[OC1RS]\t[VG]\t[pid]\t[pidstp]\t[turbo]\t[OC2RS]\t[OC3RS]\t[BUZZER]\t[Relay1]...\t[Relay6]\n
Configure command and param-eters recognized;
CFGOK\n CONFIGURED state entered.str\n STR\n Start command recognized;
STROK\n STARTED state entered;DAT\n Data set is beginning;[disp]\t[press]\t[OC1RS]\t[OC2RS]\t[OC3RS]\t[adc0]\t[adc1]\t[adc2]\t[flow]\t[POSCNT]\n
Data output;
... Repeats each second whilemaximum number of acquisi-tions is not reached;
END\n Data set has ended.Protocols
0 Change of parameters and no routine activated.1 Reset movable probe to position zero.2 Calibrate movable probe zero position.3 Send movable probe to power calibration position.4 Sweep probe in the preset range and send trigger signal to the
acquisition board. Return to position zero.
48

STATE \n", where HWID is the ID of the hardware unit and STATE refers to the state machine. This
is done in intervals of one second so the user knows the actual state of the machine except when the
experimental data is being sent. The command interfacing can be seen on Figure 4.5 (b). The user sent
commands correspond to the small caption strings, followed by the microcontroller output response. In
case the command is not recognized, no action is taken. The "cfg" command string is followed by the
protocol and experiment parameters: "cfg \t [protocol number] \t [parameter 0] ... \t [parameter n] \n". It
is also possible so send the command "cur" which returns the current status of the hardware. Table 4.1,
shows the commands, parameters and actions for each board. Further details on parameters can be
found in Apendix A.
4.4 RF Equipment
During the upgrade process, two major diagnostic techniques were rehabilitated: resonant cavity and
interferometry. These techniques depend on sensitive RF equipments such as generators and crystal
detectors. One of the major features of this CODAC project is the possibility to acquire signals and op-
erate both diagnostics simultaneously, improving the capability to compare experimental results. Since
all the original RF equipment was in perfect working condition, all the diagnostics were implemented
according to the original specifications.
For the resonant cavity (Figure 4.6) a HP 8620A sweep oscillator74 with 8621B RF section, a HP
777D75 dual directional coupler with two HP 420A crystal detectors76, a HP 423A crystal detector77 and
a GRC 874-D20L stub78 were used.
Figure 4.6: Schematic of connections made in order to implement the resonant cavity diagnostic technique.
The HP 8620A sweep oscillator and 8621B RF section (Figure 4.7) provide a frequency range com-
prised between 1.8 and 4.2GHz making it suitable to cover the 3.6GHz resonance frequency of the
cavity in TM010 mode. Besides providing fine tuning of the central frequency, the generator also allows
to set a frequency window that can be automatically seeped in a preset time base. The generator gives
an output DC signal comprised between 0 and 10.2V, proportional to frequency output into the sweep
range. Thus, by knowing the frequency windows range, it becomes possible to determine the frequency
output of the oscillator at a given time. The 8621B RF section provides the ALC mode which was used
49

to flatten and control the output power level. The output power was set to 4/6 of the scale with ALC INT
mode on. The power was determined with the Boonton 42A Microwattmeter (Figure 4.7) as oscillating
around 1±0.1mW.
Figure 4.7: RF equipment: Boonton 42A Microwattmeter (top left), HP 3200B VHF Oscillator (top right) and HP8620A SweepOscillator (bottom).
The output signal of the sweep generator was connected to the HP 777D dual directional coupler
(Figure 4.8). This device allows to sample at -19.9 dB the signal traveling from the generator to the cavity
and vice-versa. Since the working range is comprised between 1.9 and 4.0GHz, it allows to sample both
incident and reflected waves at the working frequency of the cavity. Moreover, the sampling outputs are
connected to two HP 420A crystal detectors. These provide a DC signal output and consequently allow
to measure the RF power for a given frequency.
Figure 4.8: RF equipment: (a) - dual directional coupler HP 777D with two HP 420A crystal detectors (on top), HP 423A crystaldetector (bottom left) and HP 10514A mixer (bottom right); (b) - Set of two VHF attenuators, HP 355C and HP 355D and two HP8447A RF amplifiers; (c) - Two HP 8447A RF amplifiers connected in series; (d) - RF stub, model GRC 874-D20L.
Between the dual-coupler output and the input of the cavity, a GRC 874-D20L stub (Figure 4.8) was
introduced. This aimed to match the impedance of the load, antenna and cable, to the output of the
dual-directional coupler. It was observed that after tuning the stub properly (length of 10.5±0.5cm), the
50

power delivered to the load was maximized.
In order to pick the output signal of the cavity a HP 423A crystal detector (Figure 4.8) is employed. An
attempt to introduce a second GRC 874-D20L stub into this path was made but no significant advantages
were observed. Moreover, it as observed that the signal would be less intense. It was tested in the
position of the first stub and it was concluded that the second stub was not working properly causing
high insertion losses.
For the interferometry technique (Figure 4.9) a HP 3200B VHF oscillator79 (Figure 4.7), a 50Ω T-
junction, two VHF attenuators, one RF mixer and two VHF amplifiers were used. The VHF generator
allows to manually tune the output frequency from 10MHz to a maximum of 500MHz. This is adequate for
the technique since the frequency range used is comprised between 50 and 250MHz. The signal output
connector in the back of the device also allows to regulate the power level via a piston-type attenuator.
The output signal is divided using the T-junction, connecting one output to the attenuators and the other
to the fixed Langmuir probe. Both fixed and movable Langmuir probes are used as antennas.
Figure 4.9: Schematic of connections made in order to implement the interferometry diagnostic technique.
The signal injected into the plasma column is picked by the movable probe. Due to the low signal
strength, two HP 8447A RF amplifiers80 (Figure 4.7) were connected in series to provide a total gain
of 40dB so the signal power would became in the order of hundreds of micro Watt. These provide a
working range comprised between DC and 400MHz80.
Finally, the HP 10514A mixer81 (Figure 4.8) was used to mix the signal picked by the movable probe
with the one injected into the plasma. Since the two signals must have power intensities as equal
as possible, the signal from the generator must be attenuated. This was done through two variable
attenuators connected in series (Figure 4.7), the first scaled in steps of 10dB (HP355D VHF Attenuator,
0-120dB) and the second in steps of 1dB (HP355C VHF Attenuator, 0-12dB). The power of the signals
entering the mixer must never exceed the limit of 5mW or the device will become permanently damaged.
As the phase variations induced by the propagation along the cables and the RF equipment are constant,
the mixing of the two signals allows to determine the phase shift induced by the plasma. The movable
probe signal was connected to the R input of the mixer while the attenuated signal was connected to
the L input. The output was then connected to the CODAC. It is critical to adjust the attenuation each
time the frequency of the generator is changed during the execution of the interferometry technique.
51

Moreover, the power calibration must not be done with the two probes aligned. Tests have demonstrated
that the most suitable position is 7±0.2mm off alignment to the left of the fixed probe.
Besides these equipments a HP 85688 1.5GHz Spectrum Analyzer82, a HP54100A/D 1GHz Digi-
tizing Oscilloscope83 and a Tektronix TDS 2024C 200MHz Oscilloscope were also used. Prior to any
measurements, all the RF equipments were turned on for at least one hour. This was done to ensure
that the output was as stable as possible. The connections between RF equipment, apparatus and CO-
DAC are established using 50Ω RG-58 coaxial cables. These are further explained in the Attachments
section.
52

Chapter 5
Experimental Results and Discussion
This section refers to the experimental results attained with the resonant cavity and interferometry
diagnostic techniques. The most representative results for both techniques are addressed separately,
followed by a final discussion regarding both techniques. Moreover, the ability to use the CODAC to
perform the experiments is also addressed.
5.1 Resonant Cavity
In order to perform the resonant cavity technique, the sweep generator central frequency was tuned
for the resonance frequency 3.588GHz. This was done with the apparatus in high vacuum, thus with no
electron beam or gas injection. Then, a sweep window of 40±2MHz was set for the oscillator to sweep
around the central frequency. The power was set to 1±0.1mW with the generator ALC mode activated.
Figure 5.1: Resonant cavity in vacuum at 2.1×10−5mbar: transmitted, reflected and incident signal.
Figure 5.1 presents the intensity of the transmitted, reflected and incident signals, under the previ-
53

ous experimental conditions. It is possible to observe a transmission maximum peak centered in the
resonance frequency, coincident with a minimum in the reflected signal. This is according to what was
expected since for a resonant cavity, a minimum in the reflected signal at the cavity input port corre-
sponds to a maximum in the transmission across the cavity, detected in the output port. Looking in detail
at both signals, it can be noticed that they are not perfectly symmetrical around the central frequency as
it could be ideally expected. The reason for this deformation is justified mainly by the variations in the
oscillator output power, thus in the intensity of the cavity incident signal. For instance, for frequencies
above 30MHz, the power drop in incident signal causes a clear drop in both transmitted and reflected
signals. To obtain the expected symmetry, the output power of the generator should be as constant as
possible. Several attempts to achieve a flat power output were made but with no significant improve-
ments on the results. Nevertheless, these results allow the determination of the central frequency (f0)
as well as the width (W) of the peak. These values, determined without plasma and with the cavity in
high vacuum, were used as reference to determine the frequency shift induced by the presence of the
column of plasma in the center of the cavity.
Figure 5.2: Resonant cavity transmitted signal for vacuum (2.1±0.1×10−5mbar) and for different gas pressures with an electroncurrent of 18mA and confinement field of 10.8±0.5mT (4±0.2A).
The current of the electron beam was set to 18±0.5mA with a confinement field of 10.8±0.5mT, thus
4±0.2A in the coils, and the helium pressure was varied from 0.01 to 0.05mbar. During this experimental
process, the configuration of the sweep oscillator and stub were not changed. The attained transmission
peaks for these conditions are present on figure 5.2, including the reference peak. The peaks were fitted
(Lorentz) and the determined values are presented on table 5.1. The table also contains the frequency
shifts between peaks and reference (∆f) and the calculated electron densities (ne). Electron density was
calculated using expression (1.26).
The values derived for the electron density are in the order of 109cm−3 as expected26. It is also
observable that maintaining the remaining parameters constant, an increase in pressure corresponds to
an increase in plasma density. The correlation between pressure and plasma density can be observed
54

Table 5.1: Peak Fit results for Figure 5.2. Electron beam current of 18±0.5mA and confinement field of 10.8±0.5mT (4A).
p (mbar) f0 (MHz) W (MHz) ∆f (MHz) ne (cm−3) Q2.1±0.1×10−5 18.831±0.004 3.22±0.01 — — 11141.0±0.1×10−2 18.906±0.004 3.22±0.01 0.075±0.008 7.6±0.8×107 11142.0±0.1×10−2 20.443±0.004 3.21±0.01 1.612±0.008 1.6±0.8×109 11183.0±0.1×10−2 22.072±0.005 3.19±0.01 3.241±0.009 3.3±0.9×109 11264.0±0.1×10−2 23.566±0.005 3.14±0.01 4.735±0.009 4.8±0.9×109 11445.0±0.1×10−2 25.753±0.005 3.12±0.02 6.922±0.009 7.0±0.9×109 1152
in Figure 5.3. Linear correlation can be observed for pressure values above 0.01mbar. On the other
hand, the pressure magnitude at which the experiment was conducted is two orders of magnitude above
expected, 10−2mbar instead of 10−4mbar26;6. This discrepancy in pressure values is addressed ahead.
Figure 5.3: Correlation plot between pressure and electron density determined with the resonant cavity technique.
The quality factor of the cavity in vacuum was determined as the ratio between the resonance fre-
quency and the peak half height width: Q=f0/W0=1114. Theoretically and according to expression (1.25),
the quality factor of the resonant cavity is approximately 17900 for a surface resistance RS of 15.63mΩ26.
The difference can be justified based on the fact that the theoretical formula assumes a cavity without
losses, which cause broadening of the resonance peak, resulting in a reduction on the quality factor26.
The two holes is the cavity tops also cause a reduction in the quality factor in 5.6%26, due to the for-
mation of fringing fields84. In the apparatus, the cavity is not isolated but instead integrated into a more
complex system such as in a wave guide - cavity in transmission. The connections between the waveg-
uide elements - interaction chamber, electron gun section, loop antennas - create load for the cavity and
consequently induce a drop in the quality factor (quality factor under load)84;26. Also, the connection
between the cooper cylinder and the tops creates additional Joule losses.
Nevertheless, the expected value for the experimental quality factor should be approximately 200026,
thus in the same order of magnitude of the determined value. Moreover, it can be also observed that
the quality factor increases with the increase in electron density. This is also as expected due to the fact
that the central part of the cavity was filled with a plasma column, thus with ε < ε026.
55

5.2 Interferometry
To perform the interferometry diagnostic technique, several configurations of confinement field and
electron beam current were tested. For a confinement field of 10.8±0.5mT, the threshold beam current
was found to lie between 10 and 12mA for pressures in the order of 10−2mbar. The lower limit pressure
was of 1.0±0.1×10−2mbar. The pressure range should be 10−4mbar26, thus two orders below. At this
pressure, no conclusive results were found and the experiment was conducted under the previous condi-
tions. The most expressive results here represented were attained for a pressure of 3.0±0.1×10−2mbar,
electron beam current of 18±0.5mA and confinement field of 10.8±0.5mT (4A).
Figure 5.4: Plasma E(x) patterns for three specific frequencies in the sweeped range.
In this technique, the wave number k is determined by imposing fixed values of frequency to the
system. The frequency was varied between 70 and 200MHz and the E(x) patterns were registered
using the CODAC (Figure 5.4). For each measurement, the power level of the signals entering the mixer
was calibrated using the microwattmeter and attenuators. The wavelengths were determined to the left
and to the right side of the fixed probe by measuring the distance between points with the same phase.
For frequencies above 190MHz, it was observed that the E(x) pattern did not exhibited any measurable
wavelengths. This is due to the fact that the frequency imposed by the VHF oscillator is close to the
plasma frequency, thus in the limit where wave propagation passes from real to evanescent26. Moreover,
it was also observed that as the imposed frequency increases, the wavelength decreases until no phase
variation is observed and evanescent propagation is established (amplitude variation26). The difficulty
in determining fpe by changing the imposed frequency results from the presence of the electron beam
which affects the plasma dispersion diagram26. The presence of the electron beam was disregarded in
this analysis but it was still possible to conclude that the plasma frequency should lie between 200 and
220MHz. For frequencies bellow 70MHz the wavelength is larger that the sweep range of the movable
probe making it impossible to perform any usable measurements.
The most adequate method for determining the plasma frequency consists on fitting the pairs (f,k)
with the expression for the dispersion relation (1.18), thus reconstruct the diagram for dispersion relation
of the plasma for frequencies below fpe. This was done for values determined to the left (superscript
56

Figure 5.5: Plasma dispersion relation for an electron beam current of 18mA.
-) and to the right side (superscript +) of the fixed probe, separately. By using expression (1.1) to
calculate the cyclotron frequency (302±14MHz), it was possible to retrieve the plasma frequency and
the transverse wave number p for both situations. These results are displayed on Table 5.2, along with
the calculated plasma density and plasma column radius. The density was calculated using expression
(1.1) and the radius of the plasma column with a=2.405/p.
Figure 5.6: Plasma transverse wave number for an electron beam current of 18±0.5mA.
On figure 5.6 is presented the variation of the parameter p with the frequency imposed to the plasma,
attained by replacing the experimental pairs into the dispersion relation and using the empirical value of
plasma frequency (200MHz). These values were averaged and presented on the last column of Table
5.2. It is possible to observe that the values from both methods are in the same order of magnitude,
with differences covered by the errors. The radius of the plasma column in also in the expected order
of magnitude, corroborating the hypothesis that the interaction chamber is not completely filled with the
plasma column - partially filled cylindrical waveguide. During the experimental trial it was difficult to
visually determine the actual radius of the plasma column. Nevertheless, this value was estimated in
approximately two centimeters, thus comparable with those from the dispersion equation fit. Moreover,
57

it was also observed that the visible radius of the plasma column was not constant along the plasma
column. This was attributed to the fact that the confinement field not being completely homogeneous
across the full length of the interaction chamber.
Table 5.2: Fit results for plasma dispersion relation from Figure 5.5, calculated parameters and comparison with average transversewave number from Figure 5.6. Electron beam current of 18±0.5mA.
k(f) Fit Calculated Parameters p(f)fpe (MHz) p (cm−1) a (mm) ne (cm−3) p (cm−1)
k− (left) 202±4 0.90±0.05 27±1 5.1±0.2×108 0.9±0.6k (average) 200±1 0.91±0.03 26.4±0.9 4.96±0.05×108 0.9±0.5k+ (right) 194±2 0.84±0.04 29±1 4.7±0.1×108 0.9±0.5
Using the (f,k) pairs it was also possible to build the plots for phase and group velocity presented
on Figures 5.7 and 5.8, respectively. As expected, both phase and group velocity decrease when the
imposed frequency approaches the plasma frequency. Disregarding frequencies below 120MHz due
to measurement uncertainty, it can be verified that the phase velocity is larger that the group velocity.
Globally the relation vg < vph < c could be verified, where c in the speed of light in vacuum.
Figure 5.7: Experimental determination of phase velocity for an electron beam current of 18±0.5mA.
Looking at the results displayed on Table 5.2, it is possible to observe that the plasma frequency
determined to the left of the fixed probe is larger than to the right. These results are critical since they
corroborate the hypothesis that the density of the plasma decreases along the plasma column, thus
along the interaction path of the electron beam with the low pressure helium gas26. Moreover, the
plasma order of magnitude for the plasma density is within the expected range of 108cm−3.
It should be also noticed that for frequencies close to the plasma frequency, small variations on
the density induce large variations on k due to the low group velocity at this frequency range26. This
phenomena may justify the discrepancy found between the plasma frequency from the fits and the
expected value. Although the plasma frequency retrieved from the fits was coincident with the empirical
limit of 200MHz, the difference between the actual plasma frequency and this limit was expected to be
higher.
58

Figure 5.8: Experimental determination of group velocity for an electron beam current of 18±0.5mA.
5.3 Overall Assessment
Comparing the density results obtained by both techniques (Table 5.3) for the same experimental
conditions, it is possible to observe that the density of the plasma decreased along the plasma column,
from the electron gun to the electrostatic collector. The plasma is generated by the interaction between
the low density gas and the electron beam, thus it can be expected that the density of the plasma
decreases along the interaction path.
Table 5.3: Comparison between density results determined with resonant cavity and interferometry techniques under thesame experimental conditions: pressure of 3.0±0.1×10−2mbar, electron beam current of 18±0.5mA and confinement field of10.8±0.5mT.
Resonant Cavity Interferometry3.3±0.9×109cm−3 5.0±0.1×108cm−3
Nevertheless, the density values differ in one order of magnitude and the respective errors do not
cover the difference between values. This can be explained based on two main reasons.
In Expression 1.26, used to determine the density via the resonant cavity diagnostic technique, it
was assumed that the diameter of the plasma column inside the cavity (a) was equal to the diameter
of the cavity passing holes. Actually, the plasma column created inside the cavity by the electron beam
and helium gas interaction is not confined to the size of the holes. Instead, the plasma diffuses inside
the cavity, presenting a radius larger than the one considered initially14 (Figure 5.9). The previous
assumption is a reasonable initial approximation since it is not possible to know in advance the radius of
the plasma column. The actual value of the plasma column radius (a’) can be estimated by considering
the density determined by the interferometry technique, the measured frequency shift in the cavity under
the same conditions and the inner radius of the cavity (R). These values were used to numerically solve
Expression (1.26) which returned a plasma column radius a’ of 14.7mm, approximately half of R as it
could be expected14. It can also be observed that a’ is approximately three times the value considered
in the first approximation. Given these considerations, the actual value for the radius must be lower than
14.7mm but significantly higher than 5mm. This correction would lead to cavity density values larger
than in the interferometry but yet in the same order of magnitude.
59

Figure 5.9: Plasma column inside the cylindrical resonant cavity where a is the radius of the passing holes and a’ is the actualradius of column.
The discrepancy can also be explained based on the existence of a pressure gradient inside the
apparatus caused by the vacuum pump. If the helium pressure decreases along the interaction path so
will the density of the plasma leading to the observed results. The same mechanism can be used to
explain the absence of plasma at pressures of 10−4mbar as well as the first ionization of the helium gas.
In order to achieve lower pressures, it is necessary to resort to the turbo-molecular pump. The pump
will largely increase the pressure gradient inside the interaction chamber, making it difficult to create the
plasma.
The results published regarding this apparatus26;6 revealed a different configuration which may par-
tially corroborate the previous discrepancies. The right end section of the apparatus where the turbo-
molecular pump is presently connected was longer, providing a larger inner volume between the pumps
and the interaction chamber. This extra volume could largely decrease the formation of a significant
pressure gradient along the interaction path. Moreover, the turbo-molecular pump, which replaced the
oil diffusion pumps, was designed for a volume of 150L whereas the inner volume of the apparatus is ap-
proximately 15L. Furthermore, under the previous configuration, the vacuum gauge was located directly
above the diffusion pumps which may have induced pressure readings below the actual pressure inside
the interaction chamber. Based on these assumptions, it can be concluded that the pressure gradient
formation is a critical matter to the operation of the apparatus and must be addressed in the future.
Another fundamental issue is to study plasma formation for pressures of 10−3mbar. At lower pressures,
no plasma was detected and for higher pressures the helium gas was clearly in the second ionization
regime. Since the best regime for performing experiments in this apparatus is the first ionization of the
helium26, it is critical to find under which specific conditions this regime appears.
The implementation of the CODAC system in the Beam-Plasma experiment has successfully al-
lowed the rehabilitation of the resonant cavity and interferometry diagnostic techniques. Moreover, the
experimental protocols to study the plasma parameters can now be implemented systematically and
within conditions of reproducibility. Additionally, the experimental results have shown that the apparatus
is working with the expected performance and it can now be used to perform advanced experimental
works on plasma physics.
60

Chapter 6
Conclusions and Future Work
The main goal of the present project was to rehabilitate and upgrade the Beam-Plasma apparatus in
order to make it compliant with the most recent solutions for control and data acquisition so it could be
used for advanced experimental works on plasma physics. This constituted a significant challenge since
the original integrity of the set-up should be preserved. The upgrade conducted on the set-up allowed
to understand and document the mechanisms and techniques used in its construction. Moreover, it pro-
vided the necessary insight to correctly integrate both sensors and actuators, thus to guarantee that the
CODAC would become integral part of the apparatus. The CODAC was designed to allow future expan-
sions and modifications but at the same time making the control and acquisition hardware compliant with
the e-lab platform. Experimental trials conducted on the apparatus showed that both interferometry and
resonant cavity diagnostic techniques are working properly and can be used to determine fundamental
plasma parameters. Also, it became possible to gain insight over the physical mechanisms behind the
techniques and consequently on how the different apparatus parameters affect the plasma.
Despite being operational, the process of completely upgrading this apparatus is not yet concluded.
It is still necessary to develop power supplies for the electron gun filament, confinement coils and
quadrupole that can be integrated into the CODAC. Moreover, it could be interesting to fully automate
the radio frequency equipments in order to make them accessible through the CODAC. Although it was
possible to show that the apparatus can actually be integrated into the e-lab platform, no GUI was de-
veloped at this stage. Equipping the CODAC with this feature would be a considerable improvement to
its usability. An interesting alternative for e-lab integration would be to have one of the CODAC boards
directly connected to the e-lab hardware server while the other is connected through the first one. This
configuration requires only one serial communication port at the hardware server for the hole CODAC
system and, at the same time, preserves all the available features. The gas pressure PID implementa-
tion still requires optimization in order to reduce the set-point settling time. Finally, reducing the pressure
gradient inside the apparatus is critical to conduct experiments at lower pressures, which can possi-
bly be achieved by throttling the connection between the turbo-pump and the apparatus. These future
improvements would certainly extend the experimental scope of the apparatus, giving continuity to the
present upgrade work.
61

References
[1] Chen, F. F. Introduction to Plasma Physics and Controlled Fusion (Plenum Press, 1984), 2nd edn.
[2] Maslin, N. M. HF Communications: A Systems Approach (Pitman, 1987), 1st edn.
[3] Braithwaite, N. & Franklin, R. N. 80 Years of Plasma. Plasma Sources Science and Technology 18
(2009).
[4] Dabas, R. S. Ionosphere and its Influence on Radio Communications. Resonance 5 (2000).
[5] Rawer, K. & Bilitza, D. International Reference Ionosphere - Plasma Densities: Status 1988. Ad-
vanced Space Research 10, 5–14 (1990).
[6] Cabral, J. A. C. & Varandas, C. A. F. Suppression of the electron cyclotron instability of a beam-
plasma system by selective cyclotron damping. Plasma Physics 22, 893–921 (1980).
[7] Hopman, H. J. & Ott, W. Saturation of beam-plasma instabilities due to a flattening of the beam
distribution function. Plasma Physics 10, 315 (1968).
[8] Vermeer, A., Matitti, T., Hopman, H. J. & Kistemaker, J. Excitation of ion oscillations by beam-
plasma interaction. Plasma Physics 9, 241 (1967).
[9] Barrett, P. J., Jones, H. G. & Franklin, R. N. Dispersion of electron plasma waves. Plasma Physics
10, 911–918 (1968).
[10] Wong, A. Y., Moltley, R. W. & D’Angelo, N. Landau Damping of Ion Acoustic Waves in Highly Ionized
Plasmas. Physics Review Letters 133, 1964 (1964).
[11] Nicholson, D. R. Introduction to Plasma Theory (John Wiley & Sons, 1983), 1st edn.
[12] Franklin, R. N. & Braithwaite, N. S. J. Electron plasma waves and plasma resonances. Plasma
Sources Science and Technology 18, 014019 (2009).
[13] Looney, D. & Brown, S. The excitation of plasma oscillations. Phys. Rev. 93, 965–969 (1954).
[14] Trivelpiece, A. W. & Gould, R. W. Space Charge Waves in Cylindrical Plasma Columns. Journal of
Applied Physics 30, 1784 (1959).
[15] Hershkowitz, N. & Ghim (Kim), Y.-C. Probing plasmas with ion acoustic waves. Plasma Sources
Science and Technology 18, 14–18 (2009).
62

[16] Motley, R. W. & D’Angelo, N. Excitation of Electrostatic Plasma Oscillations near the Ion Cyclotron
Frequency. Physics of Fluids 6, 296 (1963).
[17] Silva, M. E. F. & Cabral, J. A. C. Study of ion oscillations in a beam-plasma system in regimes of
very low pressure. INIS 15 (1982).
[18] Stix, T. H. Waves in Plasmas (American Institute of Physics, 1992), 2nd edn.
[19] Cap, F. Waves and Instabilities in Plasmas (Spirnger-Verlag, 1994).
[20] Huang, K. Statistical Mechanics (John Willew & Sons, 1987), 2nd edn.
[21] Malmberg, J. H. & B.Wharton, C. Dispersion of Electron Plasma Waves. Physics Review Letters
17, 175–178 (1966).
[22] Brownell, J. Ion heating by geometrical Landau damping. Physica 61, 289–298 (1972).
[23] Moutinho, A., Ikelaar, P., Los, J. & Kistemaker, J. Experimental study of a slit monoplasmatron ion
source. Nuclear Instruments and Methods 71, 56–60 (1969).
[24] Hutchinson, I. H. Principles of Plasma Diagnostics (Press, Cambrige University, 2005), 2nd edn.
[25] Merlino, R. L. Understanding Langmuir probe current-voltage characteristics. American Journal of
Physics 75, 1078 (2007).
[26] Cabral, J. A. C. Seminário de Propagação e Radiação de Ondas Electromagnéticas (IST, 1979).
[27] Hopman, H. J., Matitti, T., Vermeer, A. & Kistemaker, J. Evidence for a coherent deceleration of an
electron beam during the electron plasma frequency instability. Plasma Physics 9, 39 (1967).
[28] Hopman, H. J., Matitti, T. & Kistemaker, J. The electron cyclotron instability and high-frequency
ionization in a beam-plasma experiment. Plasma Physics 10, 1051–1067 (1968).
[29] van Wakeren, J. H. A. & Hopman, H. J. Trapping of Electrons in Large-Amplitude Electrostatic
Fields Resulting from Beam-Plasma Interaction. Physics Review Letters 28 (1972).
[30] Spong, D., Clarke, J., Rome, J. & Kammash, T. Runaway electrons in the ormak device. Nuclear
Fusion 14, 397 (1974).
[31] Bennett, S. Real-Time Computer Control (Pearson, 1994), 2nd edn.
[32] Lee, P. A. & Anderson, T. Dependable Computing and Fault-Tolerant Systems (Springer-Verlag,
1990), 2nd edn.
[33] Seborg, D. E., Edgar, T. F., Mellichamp, D. A. & III, F. J. D. Process Dynamics and Control (Wiley,
2011), 3rd edn.
[34] Simon, D. E. An Embedded Software Primer (Pearson, 1999).
63

[35] IPFN Instrumentation Boards. URL http://metis.ipfn.ist.utl.pt/CODAC/Instrumentation/
Boards. Accessed on 12/12/2014.
[36] Microchip Tecnology dsPIC30F. URL http://www.microchip.com/pagehandler/en-us/family/
16bit/architecture/dspic30f.html?f=3. Accessed on 11/12/2014.
[37] Gardner, N. PICmicro MCU C - An introduction to programming The Microchip PIC in CCS C (Ccs
Inc, 2002), 2nd edn.
[38] Xilinx Development Boards. URL http://www.xilinx.com/products/boards-and-kits.html.
Accessed on 02/01/2015.
[39] Altera Development Kits. URL http://www.altera.com/products/devkits/kit-dev_platforms.
jsp. Accessed on 02/01/2015.
[40] AG, S. SIMATIC Technology. Tech. Rep., Siemens AG (2011). URL http://www.automation.
siemens.com/salesmaterial-as/brochure/en/brochure_simatic-technology_en.pdf. Ac-
cessed on 02/01/2014.
[41] Siemens PLC control system. URL http://w3.siemens.com/mcms/
industrial-automation-systems-simatic/en/plc-control-system/pages/default.aspx.
Accessed on 02/01/2015.
[42] National Instruments Products. URL http://www.ni.com/products/pt/. Accessed on
02/01/2015.
[43] National Instruments Embeded Systems. URL http://www.ni.com/embeddedsystems/pt/. Ac-
cessed on 02/01/2015.
[44] e-lab main web page. URL http://www.elab.ist.utl.pt/. Accessed on 05/03/2015.
[45] Neto, R. B. Full deployment of an experiment under the e-lab remote laboratory framework. Ph.D.
thesis, Intituto Superior TÃl’cnico (2013).
[46] Gomes, L. & Bogosyan, S. Current Trends in Remote Laboratories. Industrial Electronics, IEEE
Transactions on 56, 4744–4756 (2009).
[47] Neto, R. B., Fernandes, H., Pereira, J. & Duarte, a. S. e-lab Remote Laboratory Integrated
Overview. Remote Engineering and Virtual Instrumentation (REV), 2012 9th International Con-
ference (2012).
[48] e-lab rec.web access page. URL http://elab.ist.utl.pt/rec.web/. Accessed on 05/03/2015.
[49] Altera Development Kits. URL http://www.java.com. Accessed on 05/03/2015.
[50] R. B. Henriques, A. S. Duarte, H. Fernandes, T. Pereira, J. Fortunato, J. P. Generic protocol for
hardware control @ e-lab Description of the ReC ( Remote experienced Control ) Generic Driver
protocol. exp@2011 Conference Proceddings (2011). URL http://paginas.fe.up.pt/~expat/
index.php?/expat11/proceedings/.
64

[51] EPICS. URL http://www.aps.anl.gov/epics/. Accessed on 10/12/2014.
[52] Watson, W. a., Barker, D., Bickley, M., Gupta, P. & Johnson, R. The CEBAF accelerator control
system: migrating from a TACL to an EPICS based system. Nuclear Instruments and Methods in
Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment
352, 118–121 (1994).
[53] Carvalho, P. et al. EPICS IOC module development and implementation for the ISTTOK machine
subsystem operation and control. Fusion Engineering and Design 86, 1085–1090 (2011).
[54] Kim, K. et al. The KSTAR integrated control system based on EPICS. Fusion Engineering and
Design 81, 1829–1833 (2006).
[55] Kim, M., Yu, I., Kim, K., Kyum, M. & Kwon, M. EPICS implementation for the KSTAR vacuum control
system. Fusion Engineering and Design 81, 1823–1827 (2006).
[56] Control System Studio. URL http://controlsystemstudio.org/. Accessed on 11/12/2014.
[57] Control System Studio, DESY. URL http://css.desy.de. Accessed on 12/12/2014.
[58] National Instruments LabVIEW. URL http://www.ni.com/labview/pt/. Accessed on 02/01/2015.
[59] EDWARDS. EDWARDS E2M-12 User Manual. Tech. Rep., EDWARDS (1996).
[60] VARIAN. Varian DS-102 User Manual. Tech. Rep., VARIAN (2009).
[61] VARIAN. Varian TV 301 Navigator Pump. Tech. Rep., VARIAN (2007).
[62] VARIAN. Varian Turbo-V 301-AG Rack Controller. Tech. Rep., VARIAN (2006).
[63] Vacuubrand. Notes concerning the operation of the vacuum gauge heads MPT100/MPT200 with
the vacuum gauge DCP 3000. Tech. Rep., Vacuubrand (2014). URL http://www.vacuubrand.
com/context/manuals/en/999226_GB.pdf.
[64] VACUUM, P. Compact Pirani Gauge TPR265 User Manual. Tech. Rep., PFEIFFER VACUUM
(2001).
[65] PFEIFFER VACUUM. Pfeiffer RVC 300 Controller. Tech. Rep., PFEIFFER VACUUM (2004).
[66] MKS. MKS Type 248A / B / C Control Valve. Tech. Rep., MKS (2006).
[67] PFEIFFER. Compact Cold Cathode Gauge IKR 270. Tech. Rep. 0206, PFEIFFER
(2005). URL https://lbtwiki.cern.ch/pub/VELO/SmogAsFixedTarget/Pfeiffer_Cold_Cath_
Gage_IKR_270.pdf.
[68] FLUKE. FLUKE 415B Instruction Manual. Tech. Rep., FLUKE (1981).
[69] Parker. Parker Flowmeters and Monitors. Tech. Rep. August, Parker (2007).
[70] HEWLETT PACKARD. HP 6274B User Manual. Tech. Rep., HEWLETT PACKARD (1976).
65

[71] HEWLETT PACKARD. HEDS-5700 Series Datasheet. Tech. Rep., HEWLETT PACKARD (2008).
[72] MSI Micro-Star. MS-9832 Mainboard User Manual. Tech. Rep., MSI Micro-Star (2008).
[73] CentOS Linux distribution. URL www.centos.org.
[74] HEWLETT PACKARD. Sweeping the Microwave Spectrum With Solid-State Sources. Tech. Rep.
November, HEWLETT PACKARD (1970).
[75] Technologies, A. 777D Dual Directional Coupler. Tech. Rep. March, Technologies, Agilent (2001).
[76] Technologies, A. 420A/B Crystal Detector Operating Note. Tech. Rep. December, Technologies,
Agilent (1971).
[77] Technologies, A. 423A and 8470A Crystal Detector Operating and Service Manual. Tech. Rep.
July, Technologies, Agilent (1976).
[78] GENERAL RADIO COMPANY. TYPE 874-LBA/-LBB SLOTTED LINES OPERATING INSTRUC-
TIONS. Tech. Rep., GENERAL RADIO COMPANY (1966).
[79] HEWLETT PACKARD. 3200B VHF Oscillator Operating and Service Manual. Tech. Rep. March,
HEWLETT PACKARD (1968).
[80] HEWLETT PACKARD. HP 8447A Amplifier Operating and Service Manual. Tech. Rep., HEWLETT
PACKARD (1970).
[81] HEWLETT PACKARD. HP 10514A/B Mixers Operating and Sevice Manual (1967).
[82] HEWLETT PACKARD. 85688 SPECTRUM ANALYZER 100 Hz-1.5 GHz. Tech. Rep. March,
HEWLETT PACKARD (1984).
[83] Technologies, A. HP 54100A/D Digitizing Oscilloscope Users’ Guide. Tech. Rep., Technologies,
Agilent (1984).
[84] Pozar, D. Microwave Engineering (Wiley, 2012), 4th edn.
[85] Experimental Physics VII Protocols, Instituto Superior Técnico, Lisbon (2001).
66

Appendices A
Appendices
A Apparatus and CODAC Operation
The CODAC system is designed so it gives the user the capability to control and monitor all the
relevant parameters in the experimental apparatus: pressure, gas injection, turbo-molecular vacuum
pump, movable Langmuir probe and electrostatic collector, among others. The DC-DC hardware units
that produce the filament high-voltage and current as well as the current in the confinement coils and
quadrupole are currently under development and testing, thus these operations are still made manually
with the original equipment. Nonetheless, both control and acquisition boards already have specific I/Os
assigned for the future integration of these modules.
Figure A.1: Schematic of the CODAC hardware front BNC connections panel, used to acquire experimental data from the diag-nostics.
The CODAC hardware front panel is presented in Figure A.1. It is composed by a local-host, a
control board and an acquisition board. The hardware modules are assembled on an 3U 19-inch Rack
crate. The local-host is based on an industrial form factor motherboard running Linux that performs the
interface between the user and the control and data acquisition boards. The front panel also presents a
series of BNC inputs connected to the acquisition board. These allow the connection of RF equipment
and signals from the resonant cavity and interferometry. The BNC connections are described, both on
Figure A.1 and on Table A.1. The origin of each input signal is further explained on the protocols.
67

Table A.1: CODAC BNC Connections.
Channel Connection/Function Gain (V/V)CH1 HP8620A sweep oscillator reference output 0.91CH2 HP423A crystal detector output (cavity transmitted wave) -194.4CH3 HP420A crystal detector output (cavity reflected wave) -2555.6CH4 HP420A crystal detector output (cavity incident wave) -100.0CH5 HP10514 RF mixer output (interferometry) 3.2CH6 Electrostatic collector output 4.7CH7 Not connected (N.C. - Future Upgrade) —CH8 Not connected (N.C. - Future Upgrade) —
Obs: Channel resolution of 1.2mV (12-bit ADCs)
A.1 Console Interface
The user interface is made through two serial text consoles present on the local-host, one for each
board. A reduced list of commands necessary to perform the protocols is presented on Table A.2.
Command application is later explained in detail and related with each stage of setup operation. When
the user sends a command to either one of the consoles, it returns CMD OK or CMD ERROR to inform
ether the command was recognized or not.
A.1.1 Control Console
The control board interface console returns a string, with the parameters enumerated below, at a
constant rate of 250ms. The variable pressure corresponds to the pressure measured inside the inter-
action chamber in mbar units. The remaining variables are integers. The opening of the needle valve
is set by the variable pr. It has a factor of ~0.04%/unit and the usage is explained in detail ahead. VG
and VV correspond to the status of the gas cut and air vent valves, respectively. In this case, zero
means the valve is closed while one means it is open. The variable turbo returns the rotation speed of
the turbo pump (~54.7rpm/unit) while h2oflow returns the coolant flow rate (~0.0798lmin-1/unit). Finally,
position refers to the position of the movable probe inside the interaction chamber. When the movable
and fixed probes are aligned, the variable is zero. If the moveable probe moves in the direction of the
filament, thus to the left of the fixed probe, the variable will have a negative value. Otherwise, if it moves
to the right, thus in the direction of the electrostatic collector it will assume a positive value. The sweep
range goes from -800 to +800 in counter units, relatively to the fixed probe, with a conversion factor of
0.192mm/unit.
//Rev. 4.0.4 (simplified console output)
"[pressure ]\t[pr]\t[VG]\t[VV]\t[turbo]\t[h2oflow ]\t[position ]\n"
A.1.2 Acquisition Console
The acquisition board is usually operated in trigger mode (mode 2). This means that it sweeps all the
channels and prints their respective values each time a trigger signal is sent by the control board. The
output is sent as a string with the following indentation:
68

//Rev. 1.5.0
"[CH1]\t[CH2]\t[CH3]\t[CH4]\t[CH5]\t[CH6]\t[counter ]\t[rate]\t[mode]\n"
All the variables are integers. Since the acquisition in made with a 12-bit ADC with 0 to 5V input
range, the CHx variables can assume values from 0 to 4095. When this mode is activated, the board
sends a sample string with the previous format and the acquisition counter is set to zero. At the end
of each sweep of the movable probe it is necessary to reset the counter so the trigger mode must be
turned off and back on. Notice that each increment on the counter corresponds to a step increment on
the encoder of the movable probe. Again, the conversion factor is 0.192mm per counter unit. This mode
allows for the establishment of a precise relation between each acquisition and the position at which it
was taken.
A.2 Setup Operation
The following sequence of instructions resume the operating procedure of the apparatus:
• Primary vacuum - Turn the rotary vacuum pump on. Depending on the initial pressure of the cham-
ber, the time to achieve pressures of ~2×10-2mbar may vary. If the pump cannot drop the pressure
below ~1mbar, turn the pump off, open the vent valve and wait until the chamber equalizes with
the atmospheric pressure. Close the vent valve and start the pump again. It may be necessary to
repeat this extra step more than once.
• High vacuum - Verify if the pressure in the helium gas line is 0.3bar over the atmospheric pressure
and open the gas cut valve. Leave the needle valve fully closed. When the pressure is below
0.01mbar, start the turbo pump and wait until the pressure is in the order of 10-5mbar.
• Electron gun - With the chamber in high vacuum, turn the water pump on. Verify if the coolant is
flowing and turn the filament current source on. Gradually adjust the current to 25A. The pressure
inside the chamber will rapidly increase due to the outgasing induced by the warmup of the tung-
sten filament. Once the pressure has reached ~10−3mbar, it will gradually decrease again until
the previous high vacuum regime is recovered. During this process, turn the high-voltage power
supply on. Wait for the stand-by pilot light to turn on and only then apply the high voltage. It must
be set to −2kV . Do not change any parameter in the power supply when it is running. The power-
off procedure is done in the reverse way. Turn the apply switch off, wait until the standby light is
on and then turn the supply off. Notice that the current of ejected electrons is directly measured
on the ammeter connected in series with the high-voltage supply and proportional to the heating
current. Do not exceed 35A in the heating current or 20mA in the high-voltage supply.
• Confinement coils - Turn the power supply for the confinement coils on and verify that the current
is set to zero. Adjust the voltage rotary control to half the scale and only then increase the current
to the desired value (operation as current source). Do not provoke sudden changes in the current
or the power source will enter in short circuit. If this happens it is necessary to restart the power
supply.
69

• Quadrupole - The power-supply for the quadrupole is operated in current mode source, similarly
to the confinement coils.
• Gas injection - The injection of Helium gas is done through the needle valve. Refer to Table A.2
for commands. The opening of this valve is proportional to the value of pr, introduced on the
command line. This variable is initially set at 0 meaning that the valve is fully closed. The valve
is fully opened when pr is 2460, although the maximum value allowed for the user to set is 1800,
corresponding to an opening of approximately 73%. This limitation is introduced to avoid flooding
the chamber and consequently damage the turbo pump in case it is working. For the protocols,
the pressure range is achieved as it follows: with the chamber in high vacuum, the filament hot
and the high-voltage applied, open the needle valve to approximately 30% and the pressure will
increase superficially; send the stop turbo-pump command and the pump driver will enter in active
breaking mode; the pressure will rise until the desired pressure regime is attained; proceed to fine
tuning of the pressure value, acting over pr.
• Experiment Standby - To stop the experiment, start by closing both needle and gas cut valves. Turn
off the high-voltage supply as previously explained. Gradually reduce the current on the filament
to zero and then turn the supply off. Proceed in the same way for the confinement coils and
quadrupole power supplies. Turn off any of the peripheral RF equipment and leave both coolant
pump and primary vacuum pumps running.
Table A.2: CODAC Terminal Commands (Short Version).
Control TerminalFunction Command
Air vent valve open: "vnt op←"; close: "vnt cl←"Gas cut valve open: "gas op←"; close: "gas cl←"
Gas needle valve first "pr←", then set the value "XXX←"Turbo pump start: "trb st←"; stop: "gas sp←"
Auto sweep probe "5←"Set probe to power calibration position "6←"
Reset probe to zero "8←"Calibrate probe zero "9←"Stop probe motion ".←"
Acquisition TerminalFunction Command
Trigger mode on: "trg on←"; off: "trg of←"
B Experimental Protocols
In the present configuration of the Beam-Plasma experimental apparatus, the CODAC system and
adjacent RF equipment allows to perform two experimental protocols simultaneously: Resonant Cavity
and Interferometry. This feature largely improves the ability to compare the results attained with both
70

techniques, since it guarantees that the experimental conditions are the same. Due to the optimization of
the experimental process and reproducibility introduced by the CODAC and the upgrade on the machine
specific hardware, from where arises the possibility to maximize the number of conditions tested in each
experimental session. This is a significant enhancement to the potential of the apparatus in the scope
of teaching the underling physical mechanisms of the plasma and the beam-plasma interaction.
B.1 Electromagnetic Cavity Protocol
B.1.1 Objectives
The objective of this work is to determine the shift in the resonance frequency of an electromagnetic
resonant cavity with cylindrical geometry. This cavity works on the TM010 mode, resultant form the
presence of the plasma column along the symmetry axis of the cavity.
B.1.2 Experimental Setup
The resonant cavity, located between the electron gun and the interaction chamber, has an interior
radius R of 32mm and a length L of 50mm. On each top there is a passing hole for the beam with radius
equal to 5mm.
The resonance frequency of the cavity in vacuum is given by the following expression:
fres =c
2π
2.405
R.
For the used cavity dimensions, fres is about 3.6GHz and a sweep oscillator (HP8620A with HP8621B
RF Section) that covers this band must be employed in order to properly stimulate the cavity and sweep
the band around the central frequency. The bandwidth shall be in the order of 10MHz. Using a sweep
oscillator brings the advantage of automatically sweeping the frequency band on a time base defined by
the user. The device provides a reference signal proportional to the output frequency. The later is con-
nected to the CH1 input of the CODAC system, as it allows for the syncing of the power measurements
explained below with the frequency produced by the generator at a given time instant.
Figure A.2: Schematic of connections for resonant cavity diagnostic technique implementation. Observe that the image maymislead in how to correctly alight the loop antennas. The normal plane of the loop must be aligned along θ, thus with the axis ofthe loop perpendicular to z 85.
71

The output of the sweep oscillator is connected to a dual directional coupler (HP777D) that works in
the desired frequency band. This device allows to sample at -20dB the signal traveling from the generator
to the cavity and the reflected wave coming towards the generator. These signals are detected with two
crystal detectors (HP420A) directly attached to the coupler sample outputs. The crystal detectors allow
to monitor and measure the power of both reflected and emitted waves with the variation of the frequency
applied to the cavity. The signals are connected to the CH3 and CH4 inputs, respectively.
A stub (HP874-D20L) is placed between the output of the coupler and the input of the cavity due to the
length of the cables. Devices called "stubs" are terminal short-circuited lines with variable length. These
allow to maximize the power delivered from the generator to the load, in this case the cavity, through
the compensation of the reactive part of the total equivalent impedance of the line. The connections
schematic can be observed on Figure A.2
The TM010 mode is the fundamental mode of this cavity, thus with lower frequency, and it also pro-
vides the possibility to excite the cavity without perturbing the plasma column. Given these characteris-
tics, the cavity is stimulated with a single loop antenna placed near the wall while on the axially opposite
side there is a receiving antenna with the same geometry. The loop produces a magnetic field orthogo-
nal to the loop plane. It propagates parallel to the cavity cylindrical wall surface along θ and the signal
transmitted is picked by the receiving antenna. The power of this signal is detected, as before, with a
crystal detector (HP423A). Again, due to the length of the cable, it may be necessary to introduce a
second stub in the reception transmission line. The output of the detector is connected to the CH2 input.
Figure A.3: Plots of power as function of frequency for emitted, reflected and transmitted signals. In this case, the incident poweris assumed to be ideally constant. As expected, a maximum in the transmitted power coincides with a minimum in the reflectedpower. From reference 85.
B.1.3 Experimental Parameters
In case the two experimental protocols are performed separately, it is crucial to be able to compare
the results obtained with this method and those from interferometry. Therefore, the same parameters
72

must be used for both the protocols. The experimental conditions shall be the following:
Table A.3: Experimental parameters for the cavity protocol.
Seep Generator Power fixed, 1mW (4/6 Scale), ALC INT (Balanced)
Helium Pressure fixed, value between 2 and 4×10-2mbarBeam Potential fixed, -2kVMagnetic Field variable, 8.1, 10.8 and 16.2mT (4, 5, and 6A)
Quadrupole Current fixed, 6A
Use the CODAC system as previously explained to retrieve the experimental pairs PTransmitted(f),
PReflected(f) and PEmitted(f). Notice that the power is proportional to the tension measured in the
crystals, PdB = 10logV0. Consult the manufacturer data-sheets for the parameters. Prior to the first
measurement, the sweep generator must be set to the desired conditions and run for at least 15 minutes
in order to warmup and guarantee that the output is as stable as possible. Remember to retrieve curves
for the cavity in vacuum without plasma to set the resonance peak reference.
B.1.4 Results and Discussion
With the data retrieved with the CODAC system, determine the following parameters:
(i) - Resonance frequency of the cavity without plasma (ω0) and the corresponding quality factor (Q0);
(ii) - The shifts in the resonance frequency and corresponding quality factors, resultant from the
variation of if and IB ;
(iii) - Using the following expression, derive the density of the plasma for each situation:
ne(cm-3) =
(8π2meε0
e2R2
a2J21 (2.405)
J20 (0.375) + J2
1 (0.375)× f0 [MHz] 106
)∆f [MHz] .
(iv) - Plot the curves ne(if ) and ne(B) and comment on the evolution of the parameters according to
the experimental conditions;
(v) - Compare the values of electron density (and plasma frequency) attained with this method with
those form the interferometry technique.
B.2 Determination of Dispersion Relation via Interferometry
B.2.1 Objectives
The objective of this work is to determine the dispersion diagram of the magnetically confined plasma
in the band 0 < ω < ωpe. The diagram is constructed with the determination of several (ω,k) pairs where
ω is imposed to the medium.
The plasma frequency ωpe is determined experimentally in the limit where the propagation of waves in
the medium becomes evanescent and through the fitting of the dispersion relation to the pairs. Ultimately,
the method allows to determine the density of the plasma.
73

B.2.2 Experimental Setup
The experimental determination of a (ω, k) pair is done via injection of a RF signal with a specific
frequency inside the plasma through the fixed Langmuir probe. The signal propagates inside the plasma
and using the movable Langmuir probe it is possible to measure the electrical field along the interaction
length. Since the plasma is this apparatus has a typical density in the order of 1014m-1, the RF generator
used must cover the 0 to 500MHz frequency band (HP3200B VHF Oscillator). The generator has an
output power of about 10mW to guarantee that the signal can properly propagate inside the medium.
The connection diagram can be observed on Figure A.4. The output signal from the VHF Oscilator is
sent to the fixed Langmuir probe through the "pick-off". This device behaves as a directional coupler,
retrieving a sample at -20dB of the traveling signal. This sample is used to provide a reference signal for
the determination of the variation in phase of the signal injected in the plasma.
Figure A.4: Schematic of connections for interferometry diagnostic technique implementation. 85.
Since the fixed probe is immerse into the plasma column, the waves travel in both directions of the
interaction chamber until the formation of a pattern resultant from the multiple reflections at the chamber
ends occurs. Using the movable probe as a receiving antenna it is possible to determine the intensity of
the pattern along the interaction chamber.
From a radiation point of view, the coupling between the plasma and the antennas is small so it is
fundamental to amplify the signal picked by the probe. This is done with two amplifiers in chain with
a 20dB gain each and band of 400MHz (HP8447A). Even with a gain of 40dB, it is still necessary to
attenuate the signal from the input pick-off so the two signals have the similar intensity when entering
the mixer (HP10514A, 500MHz BW). This is done through two variable attenuators connected in series,
the first scaled in steps of 1dB (HP355C VHF Attenuator, 0-12dB) and the second in steps of 10dB
(HP355D VHF Attenuator, 0-120dB). The power of the signals entering the mixer must never exceed the
limit of 5mW or the device will become permanently damaged.
Since the phase variations induced by the propagation along the cables and the RF equipment are
constant, the mixing of the two signals allows to determine the phase variations induced by the plasma.
The output signal of the mixer is the product of the R and L inputs, thus having the form:
S(z) = E[cos(2ωt− kz) + cos(kz)]/2,
74

Figure A.5: Example of the patterns detected in the interferometry protocol. From reference 85.
and is connected to the CH5 input of the acquisition board. The movable probe is operated by the control
board that produces a reference signal used by the acquisition board as an index to sync the position
of the probe with the measured value. It allows to construct the plot of S(z), such as in Figure A.5. It is
possible that for relatively low frequencies, the wave length measured on the pattern is not λ but λ/2, as
a result from the formation of standing waves inside the plasma column.
B.2.3 Experimental Parameters
In order to further compare the results obtained with this method with those from the resonant cavity,
it is crucial to use the same parameters for both the protocols. The experimental conditions shall be the
following:
Table A.4: Experimental parameters for the interferometry protocol.
VHF Generator Frequency variable, start at 50MHz and increment in 10MHz steps
Helium Pressure fixed, value between 2 and 4×10-2mbarBeam Potential fixed, -2kVMagnetic Field variable, 8.1, 10.8 and 16.2mT (4, 5, and 6A)
Quadrupole Current fixed, 6A
Use the CODAC system as previously explained to retrieve the experimental pair VInterferometry(z)
for each sweep of the movable probe inside the interaction chamber. Prior to the first measurement, the
VHF generator must be set to the desired conditions and run for at least 15 minutes in order to warmup
and guarantee that the output is as stable as possible. Remember that for each frequency it is necessary
to tune the attenuation in order that the signals entering in the (R) and (L) inputs of the RF mixer have
the same power magnitude and do not exceed 5mW in any situation. It is not adequate to perform the
calibration when the probes are overlapping on the standby position - use the power calibration position.
B.2.4 Results and Discussion
With the data retrieved with the CODAC system, determine the following parameters:
(i) - For each curve determine the wavelength to the left and to the right of the injection plan;
75

(ii) - For each experimental condition construct the plots k = k(ω) and determine the plasma fre-
quency ωpe, the electron density ne;
(iii) - Determine both phase (vph = ω/k) and group (vg = ∂ω/∂k) velocities and verify if the relation
vg < vph < vf stands, where vf is the velocity of the beam electrons;
(iv) - Using the dispersion relation for the plasma electronic waves,
p2
(1−
ω2pe
ω2 − ω2ce
)+ k2
(1−
ω2pe
ω2
)= 0
calculate the value of p for each (ω, k) pair. Evaluate the variation p(ω) and notice that p = 2, 405/a,
where a is the radius of the plasma column;
(v) - For the most reliable value of p calculated in (iv) and using ωpe from (ii), fit the theoretical curve
to the pairs (ω, k). If necessary, vary these two parameters and tune the curve fitting to the experimental
pairs. Perform another theoretical curve fit to the experimental pairs but without imposing the parameters
p and ωpe. It might be useful to establish plausible boundaries for them in order to accelerate the fitting
process. Compare and comment on the results.
(vi) - Derive the dispersion relation when ω << ωpe << ωce. Fit the resulting expression,
ω
k∼=ωpep
(1 +
ω2pe
ω2ce
)−1/2
to the experimental pairs with lower values of ω. Comment and compare with the previous case;
(vii) - Compare the values of electron density (and plasma frequency) attained with this method with
the results from the resonant cavity technique.
C Technical Details
76

5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
Only use with
I2C and only if
needed
MC
LRAN
0/R
B0AN
1/R
B1
UAR
T2_T
X
UAR
T2_R
X
MC
LR
UAR
T2_T
XU
ART2
_RX
RX2
TX2
PGC
/SD
I/SD
A/R
F2PG
D/S
DO
/SC
L/R
F3
MC
LR
CAN
_H
CAN
_L
CAN
_RX
CAN
_TX
CAN
_RX
CAN
_TX
CAN
_RX
CAN
_TX
U1A
RX
INT0
U1A
TX
U1A
RX
U1A
TX
AN2/
RB2
AN3/
RB3
AN4/
RB4
AN5/
RB5
AN6/
RB6
AN7/
RB7
AN8/
RB8
INT1
/OC
2/IC
2/R
D1
OC
4/R
D3
PWM
1L/R
E0PW
M1H
/RE1
PWM
2L/R
E2PW
M2H
/RE3
PWM
3L/R
E4PW
M3H
/RE5
SEN
SE
PWM
1L/R
E0
PWM
1H/R
E1
PWM
2H/R
E3
PWM
3L/R
E4
PWM
3H/R
E5
PWM
2L/R
E2
EXT_
Vcc
OC
3/R
D2
OC
1/IC
1/IN
T1/R
D0
SCK1
/RF6
AN7/
RB7
AN8/
RB8
CAN
_RX
CAN
_TX
OC
2
OU
T_1
OU
T_2
OU
T_3
AN0/
RB0
AN1/
RB1
AN2/
RB2
AN3/
RB3
AN4/
RB4
AN5/
RB5
AN6/
RB6
AN7/
RB7
AN8/
RB8
EXT_
Vcc
EXT_
Vcc
OU
T_1
OU
T_2
OU
T_3
CAN
_LC
AN_H
EXT_
Vcc
OPE
N_1
OPE
N_2
OPE
N_3
OPE
N_4
OPE
N_5
OPE
N_6
OPE
N_7
OPE
N_8
OPE
N_1
OPE
N_2
OPE
N_3
OPE
N_4
OPE
N_5
OPE
N_6
OPE
N_7
OPE
N_8
PGC
/SD
I/SD
A/R
F2PG
D/S
DO
/SC
L/R
F3SC
K1/R
F6
U1A
RX
U1A
TXR
S485
_A
CAN
_RX
CAN
_TX
RS4
85_A
RS4
85_B
U1A
RX
U1A
TX
RS4
85_B
UAR
T2_T
X
UAR
T2_R
X
EXT_
Vcc
INT1
/OC
2/IC
2/R
D1
OC
4/R
D3
OC
1/IC
1/IN
T1/R
D0
OC
3/R
D2
OC
4
OC
1O
C3
OC
2
OC
1O
C3
OC
4
PGC
/SD
I/SD
A/R
F2PG
C/S
DI/S
DA/
RF2
PGD
/SD
O/S
CL/
RF3
PGD
/SD
O/S
CL/
RF3
OC
4
OC
3O
C1
OC
2
+5V
+5V
+5V
+5V
+5V
+5V
VCC
_5
+5V
+5V
V_U
nreg
V_U
nreg
4096
mV
4096
mV
+5V
+5V
+5V
+5V
+5V
+5V
+5V_
PWR
V_U
nreg
+5V
+5V+5
V
V_U
nreg
V_U
nreg
+5V
+5V
V_U
nreg
4096
mV
+5V_
PWR
+5V_
PWR
+5V
4096
mV
+5V_
PWR
Title
Size
Doc
umen
t Num
ber
Rev
Dat
e:Sh
eet
of
1 Sc
hem
atic
v3.0
dsPI
Cno
de
C
11
Sund
ay, A
ugus
t 26,
201
2
Title
Size
Doc
umen
t Num
ber
Rev
Dat
e:Sh
eet
of
1 Sc
hem
atic
v3.0
dsPI
Cno
de
C
11
Sund
ay, A
ugus
t 26,
201
2
Title
Size
Doc
umen
t Num
ber
Rev
Dat
e:Sh
eet
of
1 Sc
hem
atic
v3.0
dsPI
Cno
de
C
11
Sund
ay, A
ugus
t 26,
201
2
U7
HFB
R-1
412
U7
HFB
R-1
412
AN
OD
E2
6
CA
THO
DE
3
AN
OD
E1
2
NC
34
NC
25
NC
41
AN
OD
E3
7
NC
18
R4
0R4
0
C17
470n
CAS
E B
C17
470n
CAS
E B
J18
CO
N7
J18
CO
N7
1 2 3 4 5 6 7
R38
120
R38
120
C23
220n
FC
2322
0nF
R32
120
R32
120
C31
100n
C31
100n
R13
470
R13
470
C10
10n
C10
10n
U5
MAX
3227
U5
MAX
3227
RE
AD
Y1
C1+
2
V+
3
C1-
4
C2+
5
C2-
6
V-
7
R1I
N8
R1O
UT
9
_IN
VA
LID
10
T1IN
11
FOR
CE
ON
12
T1O
UT
13
GND14
VCC15
_FO
RC
EO
FF16C
1410
0nC
1410
0n
R44
120
R44
120
R9
0RR9
0R
J13B
DIN
96
J13B
DIN
96
3333
3434
3535
3636
3737
3838
3939
4040
4141
4242
4343
4444
4545
4646
4747
4848
4949
5050
5151
5252
5353
5454
5555
5656
5757
5858
5959
6060
6161
6262
6363
6464
D5
LED
D5
LED
C22
1uF
C22
1uF
C1
10n
C1
10n
J21
CO
N2
J21
CO
N2
12
R47
120
R47
120
TP4
TEST
PO
INT
TP4
TEST
PO
INT
1
R35
120
R35
120
U8
HFB
R-2
412
U8
HFB
R-2
412O
UT
6
GN
D2
3V
CC
2
NC
24
NC
35
NC
11
GN
D1
7N
C4
8
R39
120
R39
120
C11
100n
C11
100n
R33
120
R33
120
C8
100n
C8
100n
P11
DB9
Fem
ale
P11
DB9
Fem
ale
594837261
R21
120
R21
120
R10
120
R10
120
R46
4k7
R46
4k7
R16
100
R16
100
R25
120
R25
120
C19
220p
FC
1922
0pF
R5
0R5
0
R19
160
R19
160
U4 MC
P255
1
U4 MC
P255
1
TXD
1
VSS2
VDD3
RX
D4
Vre
f5
RS
8C
AN
H7
CA
NL
6
SW5
SW D
IP-8
/SM
SW5
SW D
IP-8
/SM
J14
CO
N2
J14
CO
N2
1 2
C24
10nF
C24
10nF
J13A
DIN
96
J13A
DIN
96
11
22
33
44
55
66
77
88
99
1010
1111
1212
1313
1414
1515
1616
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
3131
3232
9797
9898
C15
100n
C15
100n
J12
RJ1
1
J12
RJ1
1
123456
R40
120
R40
120
TP5
TEST
PO
INT
TP5
TEST
PO
INT
1
U18 LT66
56
U18 LT66
56
GN
D 1
1
GN
D 2
2
NC
_13
VIN
4N
C_2
5V
OU
T6
C2
10n
C2
10n
TP1
TEST
PO
INT
TP1
TEST
PO
INT
1
R1
33k
R1
33k
R28
120
R28
120
J15
CO
N2
J15
CO
N2
1 2
D7
D1N
4148
D7
D1N
4148
Y1 ZTA
Y1 ZTA
C12
100n
C12
100n
R22
120
R22
120
R11
120
R11
120
R15
100
R15
100
C18
47u
CAS
E B
C18
47u
CAS
E B
R41
120
R41
120
SW2
Prog
Sw
itch
SW2
Prog
Sw
itch
C20
220p
FC
2022
0pF
R26
120
R26
120
R6
2k2
R6
2k2
J20
CO
N3
J20
CO
N3
123
R29
120
R29
120
TP6
TEST
PO
INT
TP6
TEST
PO
INT
1
C3
470n
CAS
E B
C3
470n
CAS
E B
D4
LED
D4
LED
D1
DIO
DE
D1
DIO
DE
D8
D1N
4148
D8
D1N
4148
U16 ULN
2803
U16 ULN
2803
IN_1
1
IN_2
2
IN_3
3
IN_4
4
IN_5
5
IN_6
6
IN_7
7
IN_8
8
GN
D9
OP
EN
_118
OP
EN
_217
OP
EN
_811
OP
EN
_712
OP
EN
_613
OP
EN
_514
OP
EN
_415
OP
EN
_316
CO
M10
D2
LED
D2
LED
C16
10n
C16
10n
U19
LM29
40/T
O26
3U
19LM
2940
/TO
263
IN1
OU
T3
GND2GND_PAD4
J13C
DIN
96
J13C
DIN
96
6565
6666
6767
6868
6969
7070
7171
7272
7373
7474
7575
7676
7777
7878
7979
8080
8181
8282
8383
8484
8585
8686
8787
8888
8989
9090
9191
9292
9393
9494
9595
9696
D6
LED
D6
LED
R42
120
R42
120
D3
LED
D3
LED
J16
CO
N2
J16
CO
N2
12
TP2
TEST
PO
INT
TP2
TEST
PO
INT
1
J1PWR
Jac
k
J1PWR
Jac
k
2 31
R2
470
R2
470
U15
SN75
452
U15
SN75
452
1A1
1B2
2A6
2B7
1Y3
2Y5
VC
C8
GND4
C62
100n
C62
100n
SW3
RES
ET
SW3
RES
ET
C5
18p
C5
18p
R36
120
R36
120
C21 100n
C21 100n
R30
120
R30
120
R27
0R25
1%
5W
R27
0R25
1%
5W
R18
160
R18
160
U2
MAX
485
U2
MAX
485
RO
1
RE
2
DE
3
DI
4
GND5
A6
B7
VCC8
R23
120
R23
120
R3
330
R3
330
R7
160
R7
160
R48
0RR48
0R
R12
33k
R12
33k
TP7
TEST
PO
INT
TP7
TEST
PO
INT
1
U10 L623
4
U10 L623
4
OU
T11
IN1
2
EN
13
VS14
GND15
GND26VS2
7E
N3
8IN
39
OU
T310
VR
EF
11
VC
P12
VB
OO
T13
SE
NS
E2
14
GND315
GND416
SE
NS
E1
17
EN
218
IN2
19
OU
T220
C9
10n
C9
10n
J19
CO
N3
J19
CO
N3
123
R20
160
R20
160
C13
100n
C13
100n
R43
120
R43
120
C25
100n
FC
2510
0nF
R17
160
R17
160
R8
0RR8
0R
C26
100u
FC
2610
0uF
C64
100n
C64
100n
R37
120
R37
120
R14
160
R14
160
U1
dsPI
C30
F401
1U
1ds
PIC
30F4
011
MC
LR1
EM
UD
3/A
N0/
VR
EF+
/CN
2/R
B0
2
EM
UC
3/A
N1/
VR
EF-
/CN
3/R
B1
3
AN
2/S
S1/
CN
4/R
B2
4
AN
3/IN
DX
/CN
5/R
B3
5
AN
4/Q
EA
/IC7/
CN
6/R
B4
6
AN
5/Q
EB
/IC8/
CN
7/R
B5
7
AN
6/O
CFA
/RB
68
AN
7/R
B7
9
AN
8/R
B8
10
VD
D11
VS
S12
OS
C1/
CLK
I13
OS
C2/
CLK
O/R
C15
14
EM
UD
1/S
OS
CI/T
2CK
/U1A
TX/C
N1/
RC
1315
EM
UC
1/S
OS
CO
/T1C
K/U
1AR
X/C
N0/
RC
1416
FLTA
/INT0
/RE
817
EM
UD
2/O
C2/
IC2/
INT2
/RD
118
OC
4/R
D3
19
VS
S_1
20V
DD
_121
OC
3/R
D2
22E
MU
C2/
OC
1/IC
1/IN
T1/R
D0
23S
CK
1/R
F624
PG
D/E
MU
D/U
1TX
/SD
O1/
SC
L/R
F325
PG
C/E
MU
C/U
1RX
/SD
I1/S
DA
/RF2
26U
2TX
/CN
18/R
F527
U2R
X/C
N17
/RF4
28C
1TX
/RF1
29C
1RX
/RF0
30V
SS
_231
VD
D_2
32P
WM
3H/R
E5
33P
WM
3L/R
E4
34P
WM
2H/R
E3
35P
WM
2L/R
E2
36P
WM
1H/R
E1
37P
WM
1L/R
E0
38A
VS
S39
AV
DD
40
R31
120
R31
120
L2 CH
OKE
L2 CH
OKE
R34
120
R34
120
SW4
SWIT
CH
SW4
SWIT
CH
TP3
TEST
PO
INT
TP3
TEST
PO
INT
1
J17
CO
N2
J17
CO
N2
12
U17
LM29
40/T
O26
3U
17LM
2940
/TO
263
IN1
OU
T3
GND2GND_PAD4
C4
47u
CAS
E B
C4
47u
CAS
E B
D9
DIO
DE
D9
DIO
DE
C7
4.7u
CAS
E B
C7
4.7u
CAS
E B
C6
18p
C6
18p
R45
4k7
R45
4k7
J22
CO
N8B
J22
CO
N8B
1 2 3 4
5 6 7 8
C63
100n
C63
100n
R24
120
R24
120

1N41
48
2N3904100 1000uF 25V
10k
10k
1k
1k
470n
HFBR-1522
330
44520-0001 44520-0001
44520-0001 44520-0001
44520-0001 44520-0001
44520-0001 44520-0001
F/C
M04
P
1k
MSTBA3
560560
1N41
481N
4148
100u
50V
1N4148
1N4148
GND
DG20-7011-35-1012
DG20-7011-35-1012
GND
2N3904
2N3904
2N3904
2N3904
68
FABC96R FABC96R FABC96R
3302N3904
3302N3904
3302N3904
D1
T1
R3
C1
R2
R1
R5
R4
C2
XT1
2
1
R9
X1A1A1-1A1-2A1-3A1-4A1-5A1-6A1-7A1-8
X1A2A2-1A2-2A2-3A2-4A2-5A2-6A2-7A2-8
X1B1B1-1B1-2B1-3B1-4B1-5B1-6B1-7B1-8
X1B2B2-1B2-2B2-3B2-4B2-5B2-6B2-7B2-8
X1C1C1-1C1-2C1-3C1-4C1-5C1-6C1-7C1-8
X1C2C2-1C2-2C2-3C2-4C2-5C2-6C2-7C2-8
X1D1D1-1D1-2D1-3D1-4D1-5D1-6D1-7D1-8
X1D2D2-1D2-2D2-3D2-4D2-5D2-6D2-7D2-8
SG
1
-+
R11
X2-1 1
X2-2 2
X2-3 3
R12
R13D
3D
2
C3
D4
D5
U$1
U$1
U$2
U$2
T3
T2
T8
T7
R10
X3-A1X3-A2X3-A3X3-A4X3-A5X3-A6X3-A7X3-A8X3-A9
X3-A10X3-A11X3-A12X3-A13X3-A14X3-A15X3-A16X3-A17X3-A18X3-A19X3-A20X3-A21X3-A22X3-A23X3-A24X3-A25X3-A26X3-A27X3-A28X3-A29X3-A30X3-A31X3-A32
X3-B1X3-B2X3-B3X3-B4X3-B5X3-B6X3-B7X3-B8X3-B9
X3-B10X3-B11X3-B12X3-B13X3-B14X3-B15X3-B16X3-B17X3-B18X3-B19X3-B20X3-B21X3-B22X3-B23X3-B24X3-B25X3-B26X3-B27X3-B28X3-B29X3-B30X3-B31X3-B32
X3-C1X3-C2X3-C3X3-C4X3-C5X3-C6X3-C7X3-C8X3-C9
X3-C10X3-C11X3-C12X3-C13X3-C14X3-C15X3-C16X3-C17X3-C18X3-C19X3-C20X3-C21X3-C22X3-C23X3-C24X3-C25X3-C26X3-C27X3-C28X3-C29X3-C30X3-C31X3-C32
R8
T6
R7
T5
R6
T4
JP1123
JP2123
JP3123
GNDGNDGNDGNDGNDGNDGNDGNDGNDGND
GNDGNDGNDGND
GND
GNDGND
GNDGNDGNDGNDGND
GNDGND
GNDGND
GND
GNDGND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND GND
GND GND
GND
GN
D
GND
GND
+12V+12V
+12V
+12V
+12V +12V
+12V
+12V +12V
+12V +12V
+12V
+12V
+12V
+12V+12V
+12V +12V +12V
+5V
+5V
+5V
+5V
+5V
+5V
+5V
+5V +5V
+5V
+5V
+5V
+5V
+5V
VG
VG
VG
VV
VV
VV
+24V
+24V
+24V
MT_A
MT_A
MT_A
MT_B
MT_B
MT_B
MT_CW
MT_CW
MT_ACW
MT_ACW
BUCKI_PWM
BUCKI_PWM
BUZZER
BUZZER
VP
VP
VP_PWM
VP_PWM
ADC_RPM
ADC_RPM
MPT_A
MPT_A
MPT_A
MPT_B
MPT_B
MPT_B
BUCKQ_PWM
BUCKQ_PWM
BUCKB_PWM
BUCKB_PWM
R1
R1
R2
R2
R3
R3
R4
R4
R5
R5
R6
R6 ADC_BUCKB
ADC_BUCKB
ADC_BUCKQ
ADC_BUCKQ
FLOW_H2O
FLOW_H2O
ENCODER_AENCODER_A ENCODER_BENCODER_B
TURBO_SW
TURBO_SW
REED_SW
REED_SW
TRB
TRB
RPM
RPM
BUCKB_VCC
BUCKB_VCC
BUCKQ_VCC
BUCKQ_VCC
BUCKQ
BUCKQ
BUCKB
BUCKB
+
LL
Tx
+
exp1
Sheet: 1/1
A
B
C
D
E
F
1 2 3 4
A
B
C
D
E
F
1 2 3 4
Beam-Plasma Control Board Eurocard Expansion Rev1.0 Pedro Lourenço, IPFN, MAY 2015

Pin
Functio
nsUsed
ICIN
OUT
Conn
ector
Row
Pin
Functio
n
1MCLR
2EM
UD3
/AN0/VR
EF+/CN
2/RB
0AN
0J13
C65
ADCRP
M
3EM
UC3
/AN1/VR
EF/CN3/RB
1AN
1J13
C66
ADCBU
CKB
4AN
2/SS1/CN
4/RB
2AN
2J13
C67
ADCBU
CKI
5AN
3/INDX
/CN5/RB
3CN
5J13
C68
Flow
H20
6AN
4/QEA
/IC7
/CN6/RB
4QEA
J13
C69
ENCO
DER_
A
7AN
5/QEB
/IC8
/CN7/RB
5QEB
J13
C70
ENCO
DER_
B
8AN
6/OCFA/RB
6RB
6TurboSW
9AN
7/RB
7RB
7Re
lay3
10AN
8/RB
8RB
8ULN
2803
IN_6
OPEN_6
J13
C88
Relay4
11VD
D
12VS
S
13OSC1/CLKIN
14OSC2/CLKO
/RC1
5
15EM
UD1
/SOSCI/T2CK
/U1A
TX/CN1/RC
13U1A
TRX
MAX
485
DI///
J13
C93
RS48
5_A
16EM
UC1
/SOSCO/T1C
K/U1A
RX/CN0/RC
14U1A
RXMAX
485
RO///
J13
C94
RS48
5_B
17FLTA
/INT0/RE8
RE8
Reed
18EM
UD2
/OC2
/IC2
/INT2/RD1
OC2
ULN
2803
IN_7
OPEN_7
J13
C89
PWM
Buck
B
19OC4
/RD3
RD3
ULN
2803
IN_8
OPEN_8
J13
C90
Relay6
20VS
S
21VD
D
22OC3
/RD2
OC3
ULN
2803
IN_4
OPEN_4
J13
C86
PWM
Buck
I
23EM
UC2
/OC1
/IC1
/INT1/RD0
OC1
ULN
2803
IN_3
OPEN_3
J13
C85
PWM
VP
24SCK1
/RF6
RF6
J13
C82
Relay2
25PG
D/EM
UD/U1TX/SD
O1/SCL/RF3
RF3
J13
C81
Buzzer
26PG
C/EM
UC/U1R
X/SD
I1/SDA
/RF2
RF2
J13
C80
40A_
EN
27U2TX/CN
18/RF5
28U2R
X/CN
17/RF4
29C1
TX/RF1
C1TX
MAX
485
DE///
J13
C93
RS48
5_A
30C1
RX/RF0
C1RX
MAX
485
RE///
J13
C94
RS48
5_B
31VS
S
32VD
D
33PW
M3H
/RE5
RE5
J18
7R e
lay5
34PW
M3L/RE4
RE4
J18
6Re
lay1
35PW
M2H
/RE3
RE3
J18
5VV
36PW
M2L/RE2
RE2
J18
4VG
37PW
M1H
/RE1
RE1
J18
3Motor
ACW
38PW
M1L/RE0
RE0
J18
2Motor
CW
39AV
SS
40AV
DD
dsPIC3
0F40
11dsPICn
odeV3
.0
1H2
OFlow
+5V
1MPT10
0+24V
2H2
OFlow
Sig
2MPT10
0GN
D
3H2
OFlow
GND
3RS48
5A
4N.C.
4RS48
5B
5N.C.
5EN
CCH
A
6N.C.
6EN
CCH
B
7N.C.
7EN
C+5V
8N.C.
8EN
CGN
D
1VP
+1
RB+12V
N.A
.
2VP
GND
2RB
+12V
N.A
.
3N.C.
3R1
N.A
.
4N.C.
4R2
N.A
.
5GA
S+
5R3
N.A
.
6GA
SGN
D6
R4N.A
.
7VN
T+
7R5
N.A
.
8VN
TGN
D8
R6N.A
.
1TR
BSW
1+
2T R
BSW
1GN
D
3TR
BSW
2+
4TR
BSW
2GN
D
5RP
M+
6RP
MGN
D
7PW
R+
8PW
RGN
D
1Re
edGN
D
2Re
edSIG
3N.C.
4N.C.
1GN
D
5MTA
2+5V
6MTB
3+12V
7MTA
8MTB
1BU
CKB+12V
N.A
.N.C.
Not
Conn
ected/used
2BU
CKBGN
DN.A
.N.A
.Co
lour
Not
assig
nedyet
3N.C.
N.A
.
4BU
CKBPW
M+
N.A
.
5BU
CKBPW
MN.A
.
6N.C.
N.A
.
7BU
CKBAD
C+
N.A
.
8BU
CKBAD
CN.A
.
1BU
CKI+5V
N.A
.
2BU
CKIG
ND
N.A
.
3N.C.
N.A
.
4N.C.
N.A
.
5BU
CKI_EN
N.A
.
6N.C.
N.A
.
7BU
CKIA
DC+
N.A
.
8BU
CKIA
DCN.A
.
RJ45
RJ45
PWR
1 64 532
6(X1B
2)7(X1C
2)8(X1D
2)
1(X1A
1)2(X1B
1)3(X1C
1)4(X1D
1)
8
5(X1A
2)
7
Con
trol
Boa
rd C
onne
ctio
ns R
ev. 1
.0

FABC96R FABC96R FABC96R
RJ45-6L-B
RJ45-6L-B
RJ45-6L-B
MSTBA4
LM358N
LM358N
LM358N
LM358N
LM358N
LM358N
10k
9.1k
560
560k
10k
100k33k
470n
1k
470k
1k
100k
10k
120k
22k
10k
220n
100k
470k
100n
HFBR-2521
100n120
F/TM
B120
120
X1-A1X1-A2X1-A3X1-A4X1-A5X1-A6X1-A7X1-A8X1-A9
X1-A10X1-A11X1-A12X1-A13X1-A14X1-A15X1-A16X1-A17X1-A18X1-A19X1-A20X1-A21X1-A22X1-A23X1-A24X1-A25X1-A26X1-A27X1-A28X1-A29X1-A30X1-A31X1-A32
X1-B1X1-B2X1-B3X1-B4X1-B5X1-B6X1-B7X1-B8X1-B9
X1-B10X1-B11X1-B12X1-B13X1-B14X1-B15X1-B16X1-B17X1-B18X1-B19X1-B20X1-B21X1-B22X1-B23X1-B24X1-B25X1-B26X1-B27X1-B28X1-B29X1-B30X1-B31X1-B32
X1-C1X1-C2X1-C3X1-C4X1-C5X1-C6X1-C7X1-C8X1-C9
X1-C10X1-C11X1-C12X1-C13X1-C14X1-C15X1-C16X1-C17X1-C18X1-C19X1-C20X1-C21X1-C22X1-C23X1-C24X1-C25X1-C26X1-C27X1-C28X1-C29X1-C30X1-C31X1-C32
X212345678
X312345678
X412345678
X5-1 1
X5-2 2
X5-3 3
X5-4 4
IC1A
2
31 IC1B
6
57
IC2A
2
31
IC2B
6
57
IC3A
2
31
IC4A
2
31
R1
R2
R3
R4
R5
R6R7C
1
R8
R9
R10
R11
R12
R13
R14
R15
C2
R16
R17
C3
XR1VCC3
RL4
VO1
GND2C4
R18
SG
1
-+ JP11
2
R19
R20
GNDGNDGNDGNDGNDGNDGNDGNDGNDGND
GNDGNDGNDGND
GND
GNDGND
GNDGNDGNDGNDGND
GNDGND
GNDGND
GND
GNDGND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND GND
GND
GND
GND
+12V+12V
+12V +12V +12V
+12V
+12V+12V
+12V
+12V
BUZZER
BUZZER
BULB
BULB
ADC1
ADC1
R1
R1
R2
R2
R3R3R4R4
R5
R5
R6
R6
ADC2
ADC2
ADC3
ADC3
ADC4
ADC4
ADC5
ADC5
ADC6
ADC6
CH1
CH1
CH2
CH2
CH3
CH3
CH4
CH4
CH5
CH5
CH6
CH6
+5V
+5V
+5V
-12V
-12V
BUCKI
BUCKI
exp2
Sheet: 1/1
A
B
C
D
E
F
1 2 3 4
A
B
C
D
E
F
1 2 3 4
LL
Rx
Beam-Plasma Acquisition Board Eurocard Expansion Rev1.0 Pedro Lourenço, IPFN, MAY 2015

Pin
Functio
nsUsed
ICIN
OUT
Conn
ector
Row
Pin
Functio
n
1MCLR
2AN
0/VR
EF+/CN
2/RB
0AN
0J13
C65
ADCVS
W
3AN
1/VR
EF/CN3/RB
1AN
1J13
C66
ADCCA
V
4AN
2/SS1/LVDIN/CN4/RB
2AN
2J13
C67
ADCRF1
5AN
3/CN
5/RB
3AN
3J13
C68
ADCRF2
6AN
4/IC7/CN
6/RB
4AN
4J13
C69
ADCINT
7AN
5/IC8/CN
7/RB
5AN
5J13
C70
ADCCO
L
8PG
C/EM
UC/AN
6/OCFA/RB
6J13
C71
EXTR
A_1
9PG
D/EM
UD/AN
7/RB
7J13
C72
EXTR
A_2
10AN
8/RB
8AN
8ULN
2803
IN_6
OPEN_6
J13
C88
EXTR
A_3
11VD
D
12VS
S
13OSC1/CLKI
14OSC2/CLKO
/RC1
5
15EM
UD1
/SOSCI/T2CK
/U1A
TX/CN1/RC
13
16EM
UC1
/SOSCO/T1C
K/U1A
RX/CN0/RC
14J13
C92
FILCu
rren
t
17INT0/RA1
1
18IC2/INT2/RD9
RD9
ULN
2803
IN_7
OPEN_7
J13
C89
Relay5
19OC4
/RD3
RD3
ULN
2803
IN_8
OPEN_8
J13
C90
Relay6
20VS
S
21VD
D
22OC3
/RD2
RD2
ULN
2803
IN_4
OPEN_4
J13
C86
Relay2
23IC1/INT1/RD8
RD8
ULN
2803
IN_3
OPEN_3
J13
C85
Relay1
24EM
UC3
/SCK
1/RF6
J13
C82
25EM
UD3
/U1TX/SD
O1/SCL/RF3
J13
C81
26U1R
X/SD
I1/SDA
/RF2
J13
C80
27U2TX/CN
18/RF5
28U2R
X/CN
17/RF4
29C1
TX/RF1
30C1
RX/RF0
31VS
S
32VD
D
33EM
UD2
/OC2
/RD1
J18
7
34EM
UC2
/OC1
/RD0
J18
6
35AN
12/COFS/RB1
2RB
12J18
5Re
lay4
36AN
11/CSD
O/RB1
1RB
11J18
4Re
lay3
37AN
10/CSD
I/RB
10RB
10J18
3BU
LB
38AN
9/CSCK
/RB9
RB9
J18
2BU
ZZ
39AV
SS
40AV
DD
dsPIC3
0F40
13dsPICn
odeV3
.0
1AD
C02
GND
3AD
C14
GND
5AD
C26
GND
7AD
C38
GND
1AD
C42
GND
3N.C.
4GN
D5
N.C.
6GN
D7
N.C.
8GN
D1
RB+12V
N.A
.2
RB+12V
N.A
.3
R1N.A
.4
R2N.A
.5
R3N.A
.6
R4N.A
.7
R5N.A
.8
R6N.A
.
1GN
D2
12V
3+5V
4+12V
RJ45
1 2 3
PWR
Acq
uisit
ion
Boar
d C
onne
ctio
ns R
ev. 1
.0

Parameter Accepted Range Observations
Relay(n) 0 - 1 Relay(n) on-off
Buzzer 0 - 1 Buzzer on-off
Bulb 0 - 1 Bulb on-off
CH(n) 0 - 4095 12-bit, 5V ADC channel(n)
pos 0 - 1601 Aquisition index referent to probe position
vel 0 - 30 Average number of samples per second
Parameter Accepted Range Observations
VG 0 - 1 Gas cut valve open-close
pid 0 - 1 Gas PID start-stop
pidstp 0 - 200 Gas PID setpoin in mPa
trubo 0 - 1 Turbo pump start-stop
OC1RS 0 - 2460 Gas proportional valve openning 0-100% @ 11.98KHz
OC2RS 0 - 2460 Confinement Field Supply PWM duty cycle 0-100% @ 11.98KHz
OC3RS 0 - 2460 Optical Fiber PWM duty cycle 0-100% @ 11.98KHz
Relay(n) 0 - 1 Relay(n) on-off
Buzzer 0 - 1 Buzzer on-off
disp 1 - 1000 Data index display
press X.XEXX Pressure in mbar
adc(n) 0 - 1023 10-bit, 5V ADC chanel(n)
flow 0 - 20 Flow meter pulses per second
POSCNT -800 - +800 Encoder absolute porsiton referent to probe alignment zero
Relay 1
Relay 2
Relay 3
Relay 4
Relay 5
Relay 6
Relay 1
Relay 2
Relay 3
Relay 4
Relay 5
Relay 6
Spectrum Analyzer
Bontoon Microwattmeter
VHF Oscilator
Sweep Oscilator
Board 2
High-Voltage Power Supply
Filament Current Power Supply and Coolant Pump
Rotary Vacuum Pump
Vacuum Cut Valve
Trubo Vacuum Pump
Confinement Field Power Supply
N. A. - Future imeplementation of Langmuir Probe I-V sweeper
Digitizing Osciloscope
Comunication Parameters SpecificationsAquisition Firmware 2.0.4
Control Firmware 5.0.1
Power Relay Boards ConnectionsBoard 1