Embed Size (px)
Citation preview

Automatic reconstruction of Building Information Models
Alexandre Boulch
December 19th, 2014
Defense committee:
Dr. Pierre ALLIEZDr. Bruno LEVYDr. Reinhard KLEINDr. Jan BOEHMDr. Jean-Philippe PONSDr. Renaud MARLETDr. Martin DE LA GORCE

2
Building Information Models
The BIM is a digital representation of a building
Building Information Modeling (BIM): Benefits, Risks and ChallengesSalman Azhar et al. (2008)
Model interoperability in buildinginformation modeling Steel, James et al. (2010)

3
Building Information Model
BIM

4
Building Information Model
ParticipantsCoordination
Ifc foundation
BIM

5
Building Information Model
Louis Vuitton Fundation (CSTB)
SimulationParticipantsCoordination
Ifc foundation
BIM

6
Building Information Model
Coriolis Building (ENPC)
Visualization
Louis Vuitton Fundation (CSTB)
SimulationParticipantsCoordination
Ifc foundation
BIM

7
Building Information Model
Coriolis Building (ENPC)
VisualizationLifecycleManagement
Louis Vuitton Fundation (CSTB)
SimulationParticipantsCoordination
Ifc foundation
BIM

8
Renovation of old buildings
● Huge market(e.g., improvement of thermal performance)
● No digital model● Wrong or inexisting
blueprintshttp://www.agrconstruction.fr/

9
Data
● Photogrammetry

10
Data
● Photogrammetry● Depth sensors

11
Data
● Photogrammetry● Depth sensors● Lasers

12
Reconstruct and semantize surfaces
Building materials:● Wall: aerated concrete● Window: double glazing● Window frame: aluminium● Door: wood● ...
Heat capacity:● ...
+Geometry
Semantics

13
Pipeline
Point cloud
Digital model
Structure andinformationenrichment

14
Pipeline

15
Pipeline
Normalestimation
Point cloudPoint cloud +
Normals
Local information

16
Pipeline
Normalestimation
Primitivedetection
Point cloud +Normals
Primitives
Cluster-level information

17
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Primitives Surface
Global geometric information

18
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization
Surface Digital model
Global semantic information

19
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization

20
Pipeline
Surfaceextraction
Primitivedetection
Normalestimation
Point cloudPoint cloud +
Normals
Local information
Surfacesemantization

21
Normalestimation Introduction
● Local estimation of the surface orientation
Robustness to:
noise
outliers
sharp edges
anisotropy
Speed

22
Normalestimation Introduction
● Local estimation of the surface orientation
● Robustness to
– noise
outliers
sharp edges
anisotropy
Speed

23
Normalestimation Introduction
● Local estimation of the surface orientation
● Robustness to
– noise
– outliers
sharp edges
anisotropy
Speed

24
Normalestimation Introduction
● Local estimation of the surface orientation
● Robustness to
– noise
– outliers
– sharp edges
anisotropy
Speed

25
Normalestimation Introduction
● Local estimation of the surface orientation
● Robustness to
– noise
– outliers
– sharp edges
– anisotropy
Speed

26
Normalestimation Introduction
● Local estimation of the surface orientation
● Robustness to
– noise
– outliers
– sharp edges
– anisotropy● Speed

27
Normalestimation Previous work
● Regression– Planes: Hoppe et al. Surface reconstruction from unorganized
points. SIGGRAPH, 1992.
– Jets: Cazals & Pouget. Estimating Differential Quantities using Polynomial fitting of Osculating Jets. Symposium on Geometry Processing, 2003.
● Voronoï diagrams– Dey and Goswami. Provable surface reconstruction from noisy
samples. Comput. Geometry, 2006.
● RANSAC– Li et al. Robust normal estimation for point clouds with sharp
features. Computers & Graphics, 2010.

28
Normalestimation Previous work
Regression Planes
Regression Jets
Voronoï diagrams RANSAC
Noise X X X
Outliers XSharp
features X X
Anisotropy X
Speed X X X

29
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points

30
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points
Spacechange

31
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points
Spacechange
Vote in a sphericalaccumulator

32
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points
Spacechange
Vote in a sphericalaccumulator
Select the mostprobable bin

33
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points
Spacechange
Vote in a sphericalaccumulator
Select the mostprobable bin
Generatenormal

34
Normalestimation Randomized Hough transform
Generate hypotheses:pick triplets of points
Spacechange
Vote in a sphericalaccumulator
Select the mostprobable bin
Generatenormal
How manyhypotheses must
be generated ?

35
Normalestimation Robust lower bound
● Filled accumulator of M bins:empirical approximation of a probability distribution
● Estimate the quality of the approximation.
T*, minimum number of triplets to pick such that :
δ
δ: deviation toleranceα: confidence level

36
Normalestimation Robust lower bound
● Filled accumulator of M bins:empirical approximation of a probability distribution
● Estimate the quality of the approximation.
T*, minimum number of triplets to pick such that :
● From Hoeffding inequality:

37
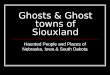
Normalestimation Results
Cazal & Pouget (2003)
Li & al (2010)
Ours
10°
Color code

38
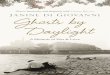
Normalestimation Speed and accuracy
● Same complexity
● As accurate and faster than[Li et al. 2010]
Ours
Time (s), logarithmic scaleNote: [Dey & Goswany 2006] does not appear on the graphic, because the method is not robust to noise
Cylinder, 0.2% noise, 200k points

39
Normalestimation Visuals results: laser scans

40
Normalestimation Visual results: photogrammetric data

41
Normalestimation Conclusion
● Robust normal estimator based on Hough Transform– accurate
– robust to noise, outliers, sharp edges and anisotropy
– fast
● Limitations– smooth normals on wide angles

42
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization

43
Cluster level information
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Point cloud +Normals
Primitives
Surfacesemantization

44
Schnabel & al (2007)
Primitivedetection
Extraction
RANSAC
Region growing
Fusion

45
Primitivefusion Practical example
Over-segmentation

46
Primitivefusion Practical example
Over-segmentation

47
Primitivefusion Practical example
Over-segmentation

48
Primitivefusion Existing methods
● Tolerance on parameters– 3 for a plane (2 for orientation, 1 for distance)
– 4 for a sphere (3 for position, 1 for radius)
– …
● A contrario criterion only for planes in depth maps [Bughin, E. 2010.]

49
Primitivefusion Existing methods
● Tolerance on parameters :– 3 for a plane (2 for orientation, 1 for distance)
– 4 for a sphere (3 for position, 1 for radius)
– …
● A contrario criterion only for planes in depth maps [Bughin, E. 2010.]
Our method:– One single indicator: distribution of distances to
primitive

50
Primitivefusion Criterion for fusion● Two surfaces and , associated with point sets
and ● Distance function from point to primitives● Define two sets:
● If then ● Statistical tests
– Mann-Whitney
– Kolmogorov-Smirnov

51
Primitivefusion Results

52
Primitivefusion Results
Nothing changed

53
Primitivefusion Results
Nothing changed
● Very small difference in the distributions rejection
No user control on acceptance

54
Primitivefusion Results
● Very small difference in the distributions rejection
● No user control on acceptance
Nothing changed

55
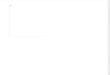
Primitivefusion Primitive fusion
0.0 0.2 0.4 0.6 0.8 1.0
Distance
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Den
sity
σ = 0.01
Distribution of X
Distribution of Y
0.0 0.2 0.4 0.6 0.8 1.00.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18σ = 0.05
0.0 0.2 0.4 0.6 0.8 1.00.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09σ = 0.1
0.0 0.2 0.4 0.6 0.8 1.00.000
0.005
0.010
0.015
0.020
0.025
0.030σ = 0.3
Example: two parallel lines at distance 0.1
Smooth distributions to ensure a controlled fusion

56
Primitivefusion Results
Increasing the level of smoothing

57
Primitivefusion Results
Increasing the level of smoothing
Smoothing level: 0.01

58
Primitivefusion Results
Increasing the level of smoothing
Smoothing level: 0.02

59
Primitivefusion Results
Increasing the level of smoothing
Smoothing level: 0.03

60
Primitivefusion Conclusion
● Criterion for primitives fusion– robustness to noise
– support for any primitive type (plane, cylinder...)
– intuitive user control on merging
● Limits– empirical relation between noise and fusion
distance

61
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization

62
Pipeline
Normalestimation
Primitivedetection
Surfaceextraction
Primitives Surface
Global geometric information
Surfacesemantization

63
Surfaceextraction Objective
Automatic surface reconstruction from laser scan– watertight without self intersection
– piecewise planar
– extended plausibly in hidden region

64
Surfaceextraction Objective
Automatic surface reconstruction from laser scan– watertight without self intersection
– piecewise planar
– extended plausibly in hidden regionwith support for data anisotropy

65
Surfaceextraction Previous work
● Smooth priors– e.g. Poisson reconstruction
● Voxelisation– biased, expensive
● Delaunay tetrahedralization– visible regions only
● Plane adjacency– visible near adjacency
● Manhattan world assumption– too restrictive: 3 directions only

66
Surfaceextraction Chauve et al.
● Plane arrangement– Visible planes
– Hidden plane hypotheses (called ghosts)
● Binary labelization of resulting 3D cell complex (empty or full)– Surface minimization, graph-cut optimization
● Advantages– watertight and non self-intersecting surfaces
– preservation of sharp edges
– extension of primitives far in hidden regions
– more plausible surfaces thanks to hidden plane hypotheses
A.-L. Chauve, P. Labatut, J.P. PonsRobust piecewise-planar 3D reconstruction and completion from large-scale unstructured point data. CVPR 2010

67
Surfaceextraction Chauve et al. (2)● Limitations
– wrong primitive borders with anisotropic point clouds
● Our method– determination of
borders in laser depth image
α-shape

68
Surfaceextraction Chauve et al. (3)● Limitations
– missing plane hypotheses
● Our method– generation of parallel
ghosts (for thin objects without detected thickness)

69
Surfaceextraction Chauve et al. (4)● Limitations
– Holes and truncated corners due to area minimization
● Our method– Edge length and
corner number minimization

70
Surfaceextraction Overview of the method
● Laser point cloud
Primitive extraction
Ghost generation
Volume partition using a plane arrangement
Binary partition using linear programming
Surface extraction

71
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction
Ghost generation
Volume partition using a plane arrangement
Binary partition using linear programming
Surface extraction

72
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction● Ghost generation
Volume partition using a plane arrangement
Binary partition using linear programming
Surface extraction

73
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction● Ghost generation● Volume partition using
a plane arrangement
Binary partition using linear programming
Surface extraction

74
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction● Ghost generation● Volume partition using
a plane arrangement● Binary partition using
linear programming
Surface extraction

75
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction● Ghost generation● Volume partition using
a plane arrangement● Binary partition using
linear programming● Surface extraction

76
Surfaceextraction Overview of the method
● Laser point cloud● Primitive extraction● Ghost generation● Volume partition using
a plane arrangement● Binary partition using
linear programming● Surface extraction

77
Surfaceextraction Partition
● Partition the volume with a plane arrangement
● Labelization of each cell as empty or occupied

78
Surfaceextraction Energy formulation
● Energy
Data term
Penalizes a surface disagreeing with
observations
Regularization term
Penalizes a complex surface in the hidden areas

79
Surfaceextraction Data term

80
Surfaceextraction Data term
Penalize if xp+
= xp-

81
Surfaceextraction Data term
Penalize if xf+
≠ xf-

82
Surfaceextraction Edge and Corner Regularization

83
Surfaceextraction Edge and Corner Regularization
Shorter edgesSmaller corner number Smaller area

84
Surfaceextraction Edge and Corner Regularization
Shorter edgesSmaller corner number Smaller area

85
Surfaceextraction Edge and Corner Regularization
Shorter edgesSmaller corner number Smaller area
Smaller areaShorter edges
Smaller corner number

86
Surfaceextraction Regularization term
Area penalization
Edge length penalization
Corner number penalization

87
Surfaceextraction Regularization term
Area penalization
Edge length penalization
Corner number penalization

88
Surfaceextraction Edge term
EdgeNo edge
1-1-1+1=0 1-0-1+1=1 1-0-0+1=21-0-1+0=0

89
Surfaceextraction Corner term

90
Surfaceextraction Energy minimization
● Objective
● Very challenging for Markov Random Field– Edges: 4th order potential
– Corners: 8th order potential
– Tree-reweighted Belief Propagation: extremely slow
– Lazy Flipper: local minimum, extremely suboptimal

91
Surfaceextraction Linear relaxation
● Reformulation and relaxation
● This is a standard Linear Program

92
Surfaceextraction Results: meeting room
Area term onlyChauve et al.

93
Surfaceextraction Results: meeting room
Corner term onlyEdge term only
Area term onlyChauve et al.

94
Surfaceextraction Results: meeting room
Edge term only Corner term only

95
Surfaceextraction Results: meeting room
Corner only Edge + corner

96
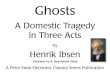
Surfaceextraction Results: facade

97
Surfaceextraction Conclusion
● A method for piecewise planar surface reconstruction
● Compared to Chauve et al.– handling of anisotropy
– better surface hypotheses in hidden areas
– better regularization on edge length and corner number
● Limits and perspectives– scaling to entire buildings
– need for regularity discovery

98
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization

99
Pipeline
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization
Surface Digital model
Global semantic information

100
Semanticenrichment Building semantization
● Input: surface + semantic priors
● Output:semantized surface Surface Digital model
Method:– Bottom-up
– Based on grammars

101
Semanticenrichment Grammars
Sentence
Subject Verb Complement
NounAdjective
The super computer rules Discovery One
Building
Facade Roof
Window WallArticle
Facade
Expression of hierarchical decompositions

102
Semanticenrichment Constrained attribute grammars
Sentence
Subject Verb Complement
NounAdjective
The super computer rules Discovery One
Building
Facade Roof
Window WallArticle
Facade
Agreement (singular)
adj
Expression of complex relationsbetween elements

103
Semanticenrichment Stairway grammar
Stairway
Polygon
Polygon

104
Semanticenrichment Basic rule
Tread t → Polygon p
Riser r → Polygon p
Step s → Tread t, Riser r
riser
tread

105
Semanticenrichment Basic rule
Tread t → Polygon p
Riser r → Polygon p
Step s → Tread t, Riser r
Riser ?
Tread ?
riser
tread

106
Semanticenrichment Conditional rule
Tread t → Polygon p ( horizontal(p), p.length < 2 )
Riser r → Polygon p ( vertical(p), 0.05 < p.width < 0.25 )
Step s → Tread t, Riser r ( edgeAdj(t,r), above(t,r) )
Step

107
Semanticenrichment Collections
Tread t → Polygon p ( horizontal(p), p.length < 2 )
Riser r → Polygon p ( vertical(p), 0.05 < p.width < 0.25 )
Step s → Tread t, Riser r ( edgeAdj(t,r), above(t,r) )
Stairway w → sequence(Step s, edgeAdj) ms
Stairway

108
Semanticenrichment Combinatorial Explosion
● Enumerating collections may lead to combinatorial explosion

109
Semanticenrichment Combinatorial Explosion
● Enumerating collections may lead to combinatorial explosion

110
Semanticenrichment Combinatorial Explosion
● Enumerating collections may lead to combinatorial explosion

111
Semanticenrichment Combinatorial Explosion
● Enumerating collections may lead to combinatorial explosion
Total: 4 + 3 + 2 + 1 = 10 possible sequences

112
Semanticenrichment Maximal collections
Stairway
In practice, useful = largest collection:
Maximal operators (maxseq, maxcycle,...)
– fast computation
– low number of instances
Tread t → Polygon p ( horizontal(p), p.length < 2 )
Riser r → Polygon p ( vertical(p), 0.05 < p.width < 0.25 )
Step s → Tread t, Riser r ( edgeAdj(t,r), above(t,r) )
Stairway w → maxseq(Step s, edgeAdj) ms

113
Semanticenrichment Results
● Two grammars– Facade
– Stairway
● Experiments– synthetic data: CAD models, simulated laser scans
– real data: laser scans, photogrammetric data

114
Semanticenrichment CAD Models
Triangle soup

115
Semanticenrichment CAD Models
Triangle soup Polygons

116
Semanticenrichment CAD Models
Triangle soup PolygonsSemantized
model

117
Semanticenrichment CAD Models
Triangle soup PolygonsSemantized
model
Semantizedmodel
+ texture

118
Semanticenrichment Real laser scan: stairs

119
Semanticenrichment Conclusion
Grammar-based building semantization method– pure bottom-up parsing
– combinatorial explosion containment
– grammars easy to design
– grammars maintainable by non computer scientist
Limits and perspectives– need of flexibility (missing elements, merged
geometries)
– learning of rule parameters

120
Conclusion
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization
● Pipeline for surface reconstruction and semantization frompoint cloud
● A step towards automatic BIM reconstruction

121
General perspectives
Surfaceextraction
Normalestimation
Primitivedetection
Surfacesemantization
● Arbitrary order– surface useful for
semantization
semantics useful for surface reconstruction
Simultaneous or loop over semantics and surface extraction
Dealing with volumes

122
General perspectives
Normalestimation
Primitivedetection
● Arbitrary order– surface useful for
semantization
– semantics useful for surface reconstruction
Simultaneous or loop over semantics and surface extraction
Dealing with volumes Surfaceextraction
Pointsemantization

123
General perspectives
Normalestimation
Primitivedetection
● Arbitrary order– surface useful for
semantization
– semantics useful for surface reconstruction
● Simultaneous or iterated semantics and surface extraction
Dealing with volumes
Surfaceextraction
andsemantization

124
General perspectives
● Arbitrary order– surface useful for
semantization
– semantics useful for surface reconstruction
● Simultaneous or iterated semantics and surface extraction
Dealing with volumes

125
General perspectives
● Arbitrary order– surface useful for
semantization
– semantics useful for surface reconstruction
● Simultaneous or iterated semantics and surface extraction
● Dealing with volumeshttp://www.bimvision.eu/

126
Thank you for your attention
Fast and Robust Normal estimation for Point Clouds with Sharp Featureswith Renaud MarletSGP 2012Computer Graphics Forum
Semantizing Complex 3D Scenes using Constrained Attribute Grammarswith Simon Houiller, Renaud Marlet and Olivier TournaireSGP 2013Computer Graphics Forum
Statistical criteria for primitive mergingwith Renaud MarletICPR 2014
Piecewise-Planar 3D Reconstruction with Edge and Corner Regularizationwith Martin de La Gorce and Renaud MarletSGP 2014Computer Graphics Forum