Embed Size (px)
Citation preview
Automatic control by meiling chen 1
Lesson 10
System design
Automatic control by meiling chen 2
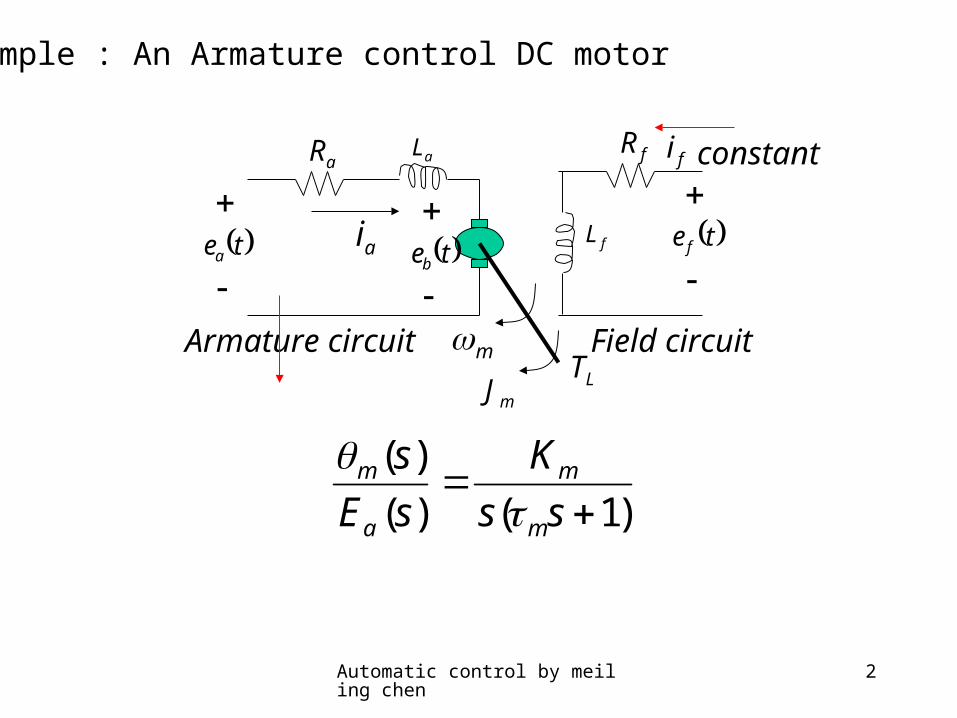
Example : An Armature control DC motor
aR aL
ai
tea
fR
fL
teb
m
mJ LTArmature circuit Field circuit
te f
fi constant
)1()(
)(
ss
K
sE
s
m
m
a
m
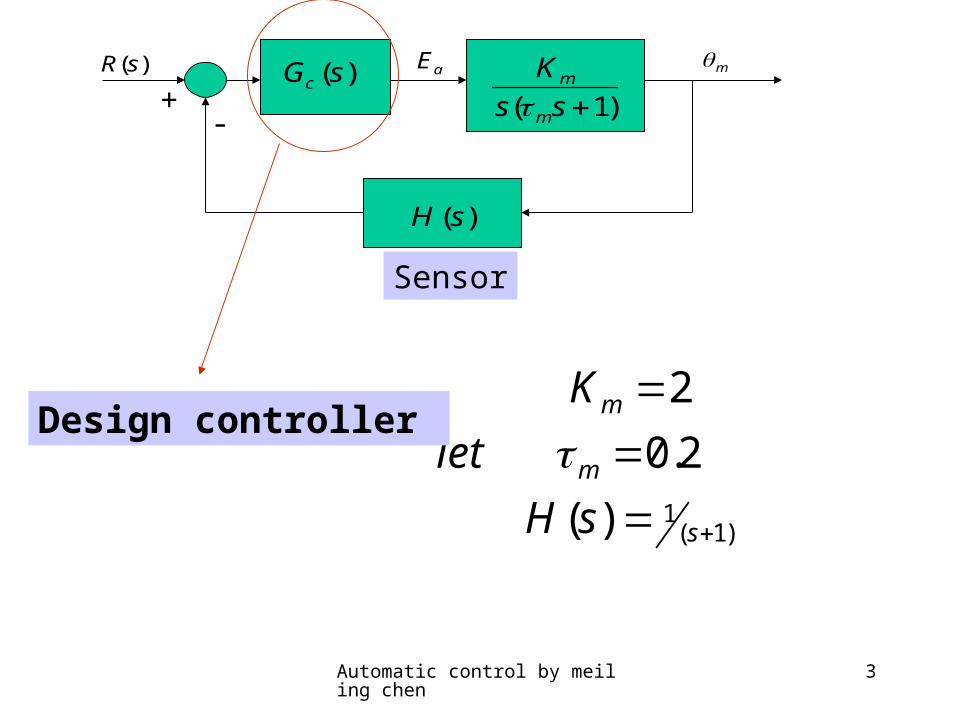
Automatic control by meiling chen 3
)1( ss
K
m
m
m
aE
+-
)(sH
)(sGc)(sR
)1(1)(
2.0
2
s
m
m
sH
K
let Design controller
Sensor
Automatic control by meiling chen 4
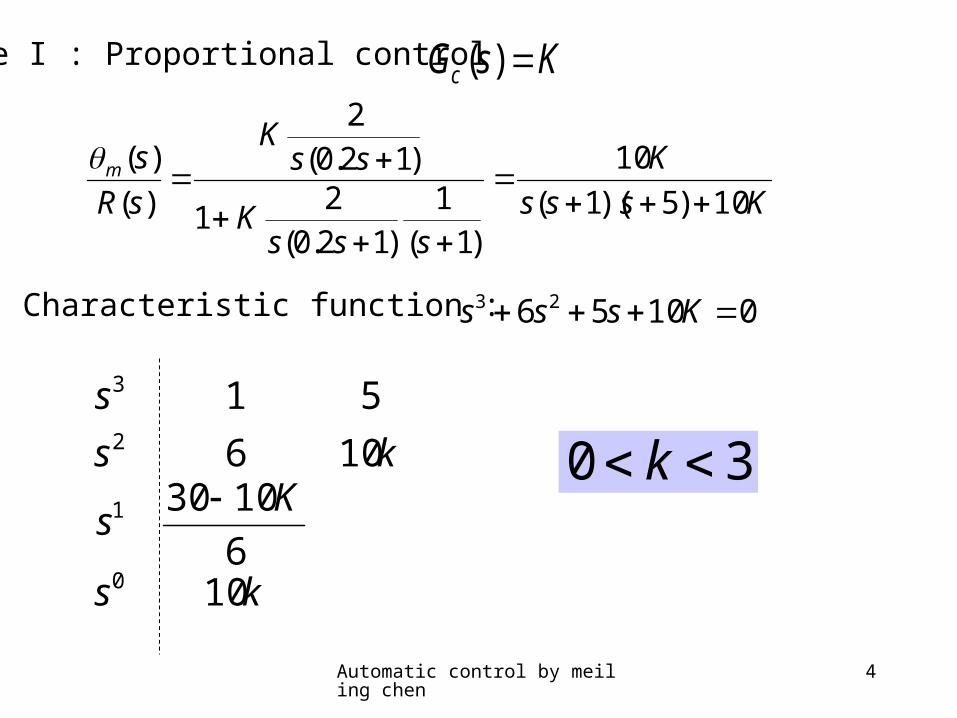
Case I : Proportional control KsGc )(
Ksss
K
sssK
ssK
sR
sm
10)5)(1(
10
)1(1
)12.0(2
1
)12.0(2
)(
)(
01056 23 KsssCharacteristic function :
ks
Ks
ks
s
106
1030106
51
0
1
2
3
30 k
Automatic control by meiling chen 5
5 1 02
0k0k0kk
k
k
3k
3k
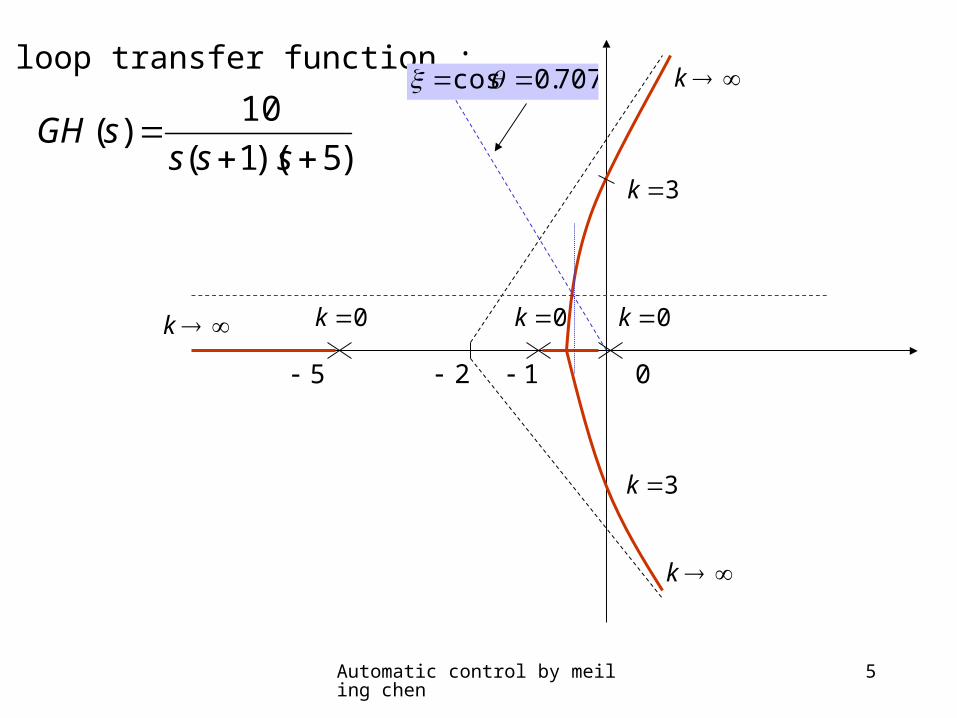
)5)(1(
10)(
ssssGH
Open loop transfer function : 707.0cos
Automatic control by meiling chen 6
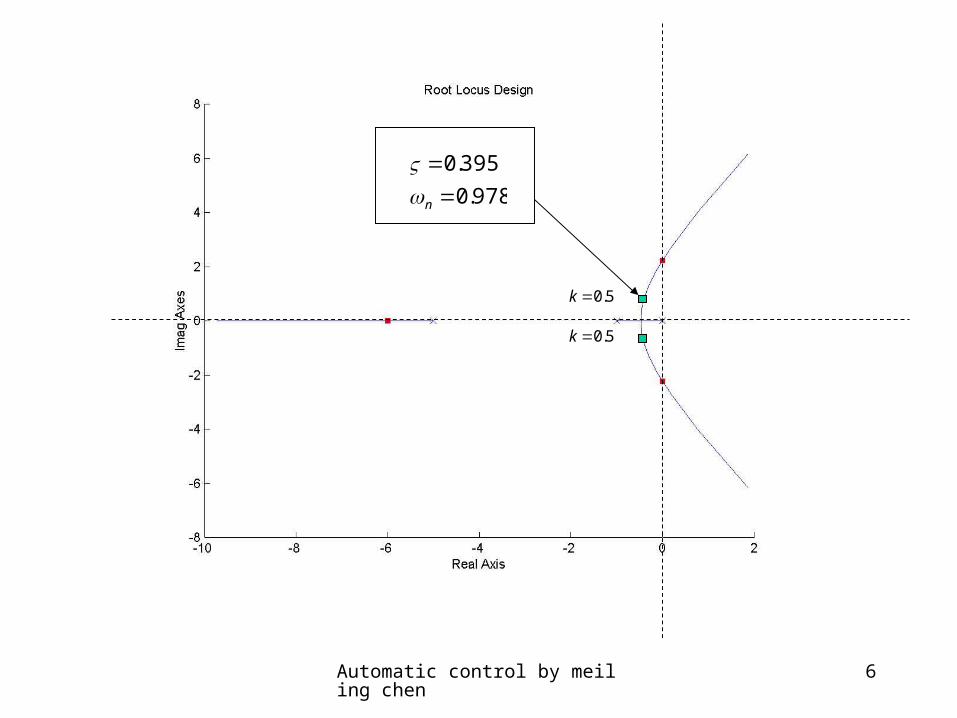
5.0k
5.0k
978.0
395.0
n
Automatic control by meiling chen 7
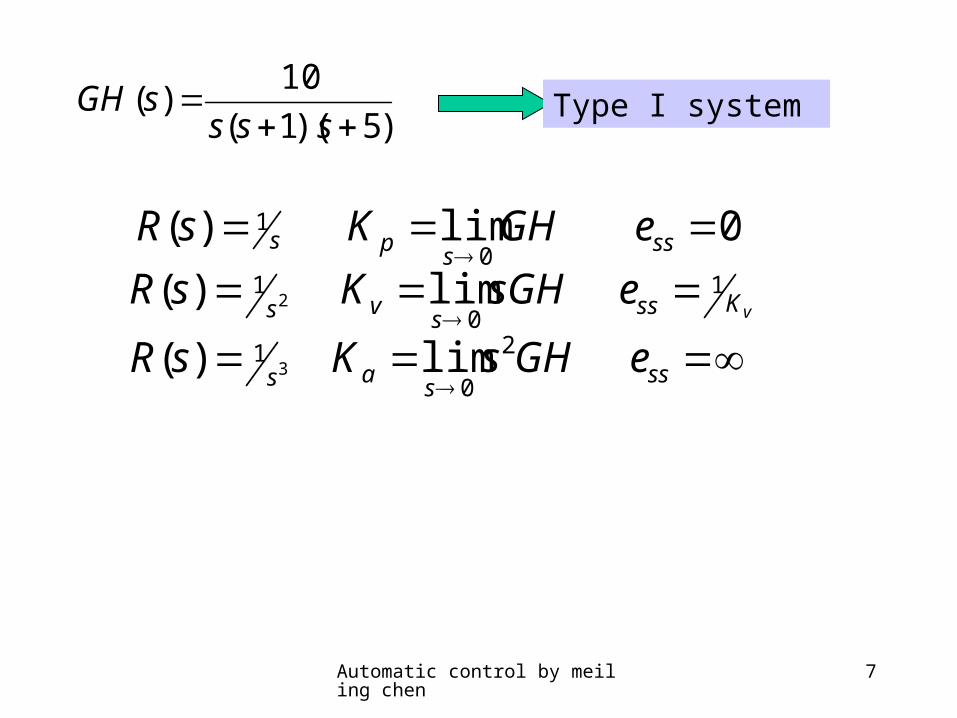
)5)(1(
10)(
ssssGH Type I system
sss
as
Ksss
vs
sss
ps
eGHsKsR
esGHKsR
eGHKsR
v
2
0
1
1
0
10
1
lim)(
lim)(
0lim)(
3
2
Automatic control by meiling chen 8
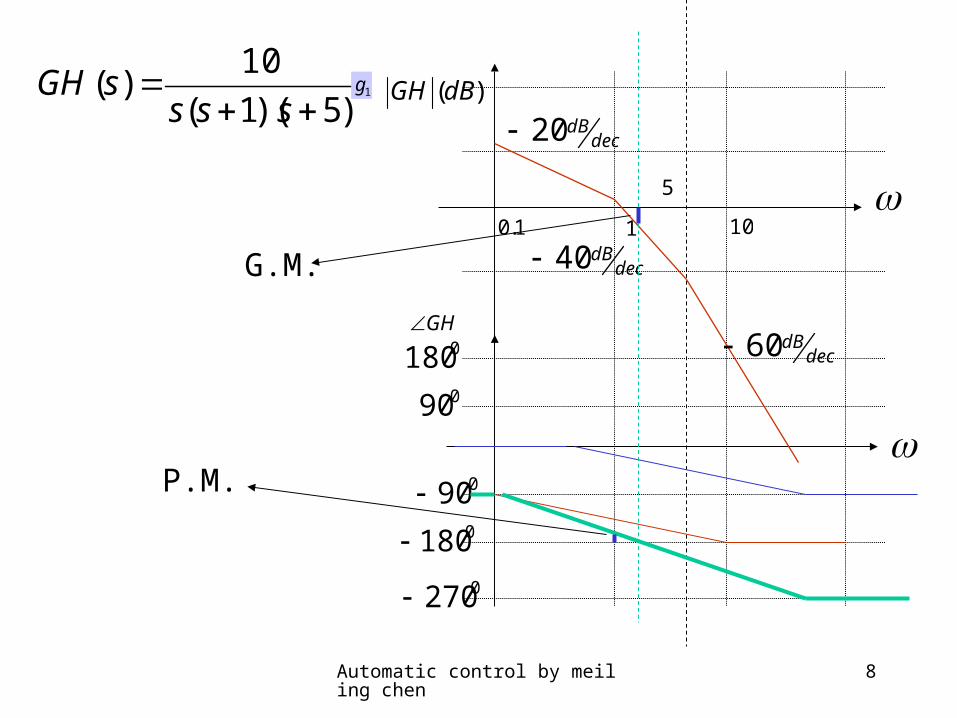
)5)(1(
10)(
ssssGH )(dBGH
GH
1.0 1 10
0900180
090
0180
5
decdB20
decdB60
decdB40
0270
G.M.
P.M.
1g
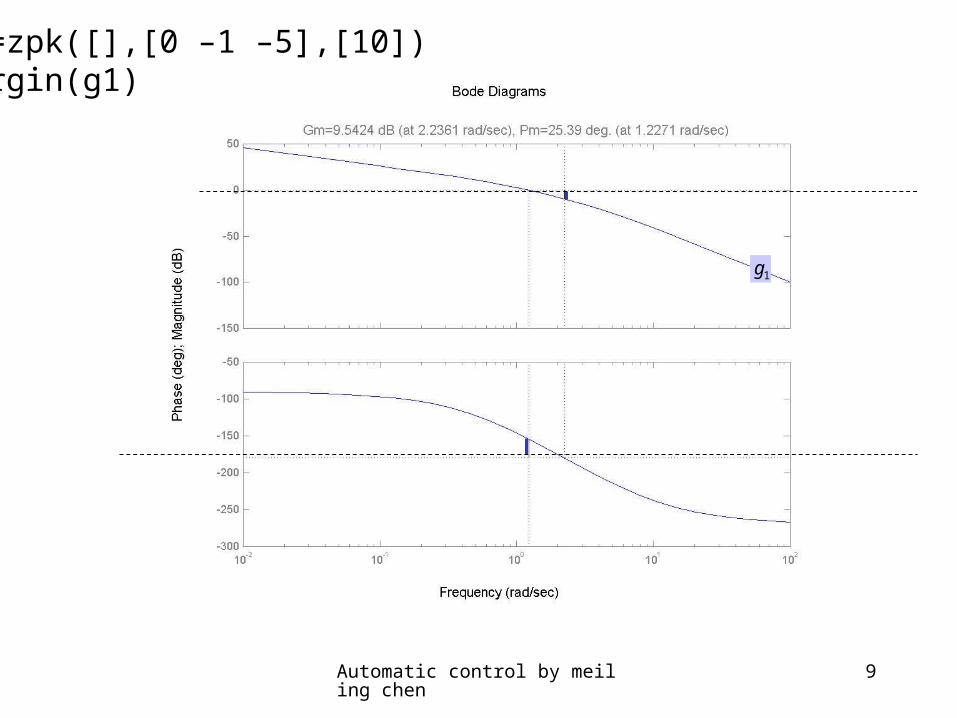
Automatic control by meiling chen 9
g1=zpk([],[0 –1 –5],[10])margin(g1)
1g
Automatic control by meiling chen 10
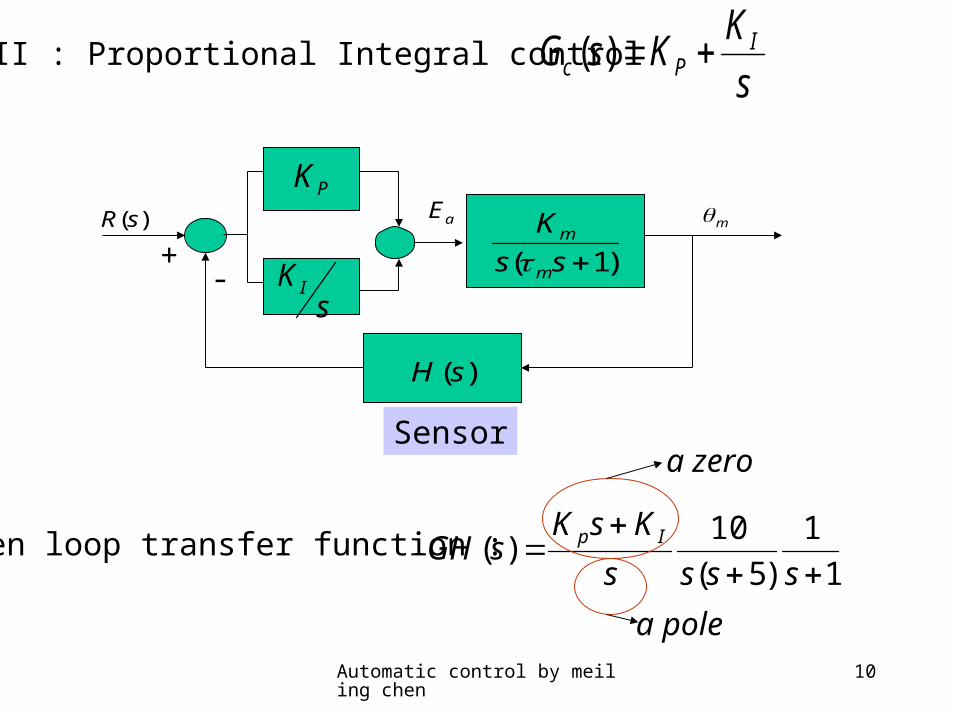
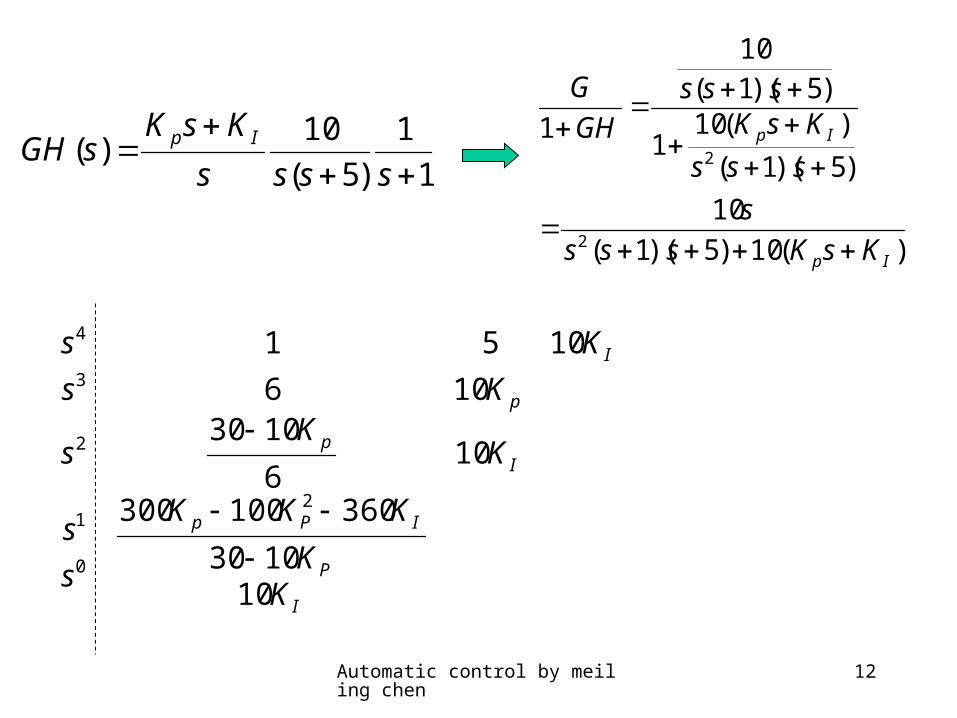
Case II : Proportional Integral control s
KKsG I
Pc )(
)1( ss
K
m
m
maE
+-
)(sH
)(sR
Sensor
PK
sK I
1
1
)5(
10)(
ssss
KsKsGH IpOpen loop transfer function :
a zero
a pole
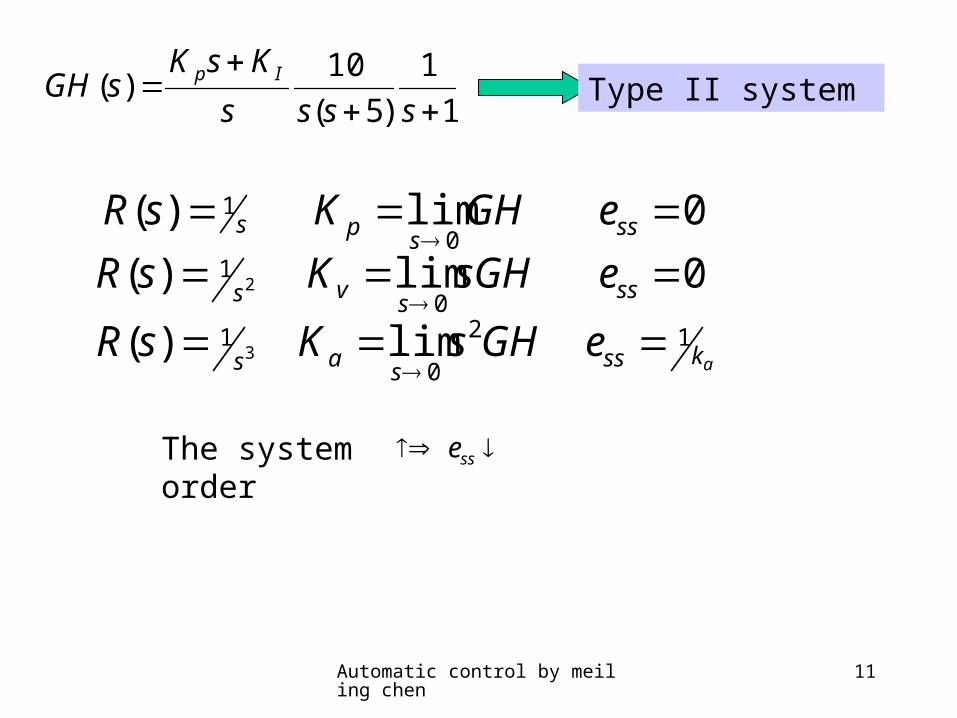
Automatic control by meiling chen 11
1
1
)5(
10)(
ssss
KsKsGH Ip
Type II system
aksss
as
sss
vs
sss
ps
eGHsKsR
esGHKsR
eGHKsR
12
0
10
10
1
lim)(
0lim)(
0lim)(
3
2
The system order
sse
Automatic control by meiling chen 12
1
1
)5(
10)(
ssss
KsKsGH Ip
)(10)5)(1(
10
)5)(1(
)(101
)5)(1(10
1
2
2
Ip
Ip
KsKsss
s
sss
KsKsss
GH
G
I
P
IPp
Ip
p
I
KK
KKK
s
s
KK
s
Ks
Ks
101030
360100300
106
1030106
1051
2
0
1
2
3
4
Automatic control by meiling chen 13
5 1 02
0pk0pk0kk
k
k
3k
3k
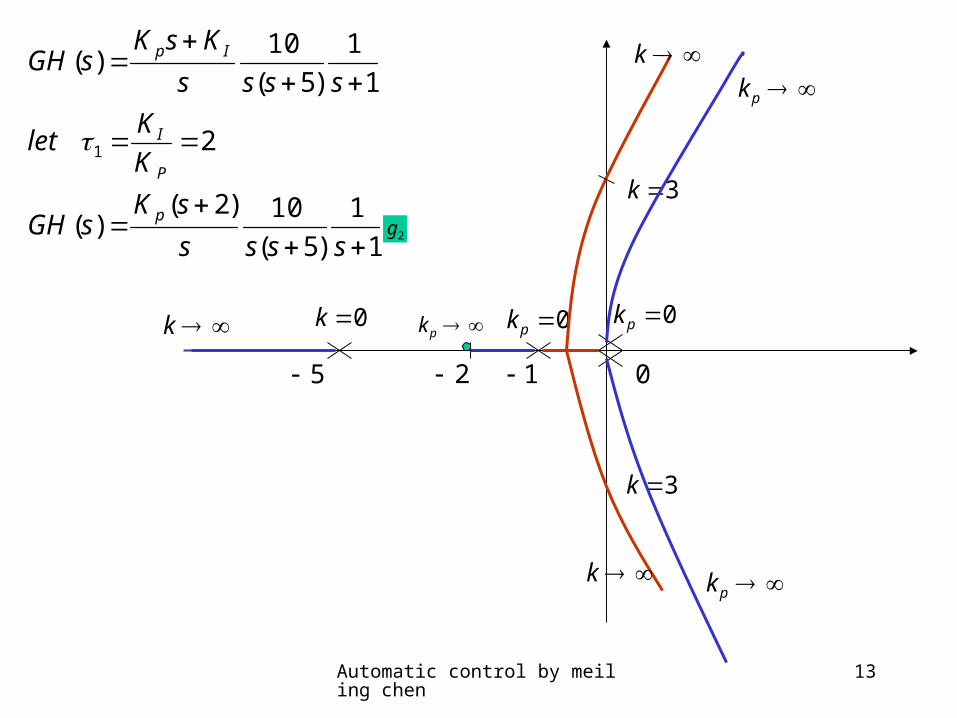
1
1
)5(
10)2()(
2
1
1
)5(
10)(
1
ssss
sKsGH
K
Klet
ssss
KsKsGH
p
P
I
Ip
pk
pk
pk
2g
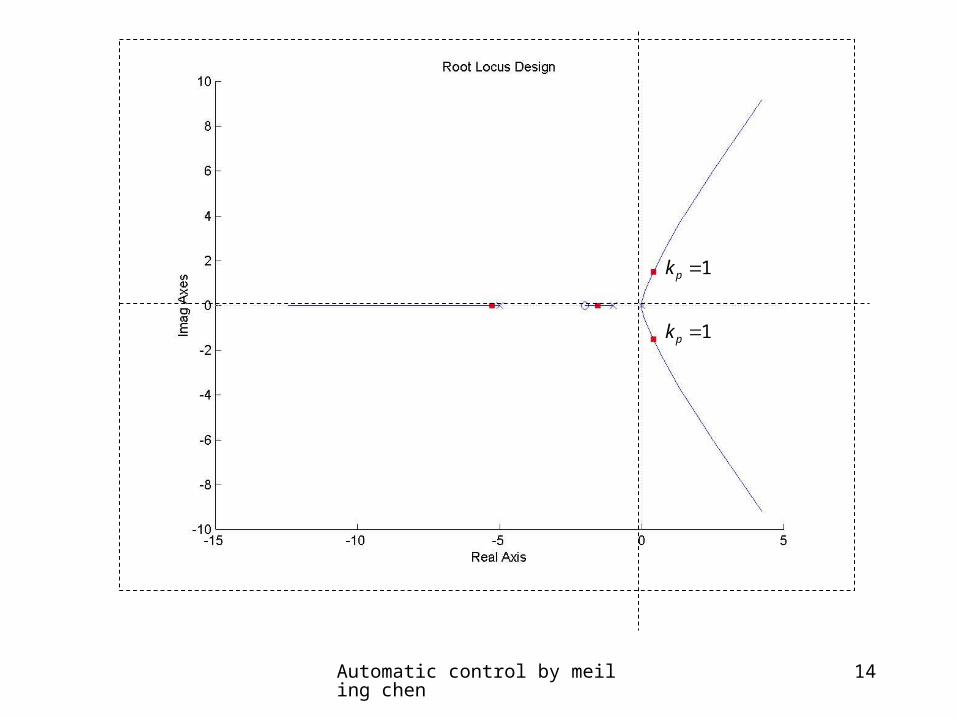
Automatic control by meiling chen 14
1pk
1pk
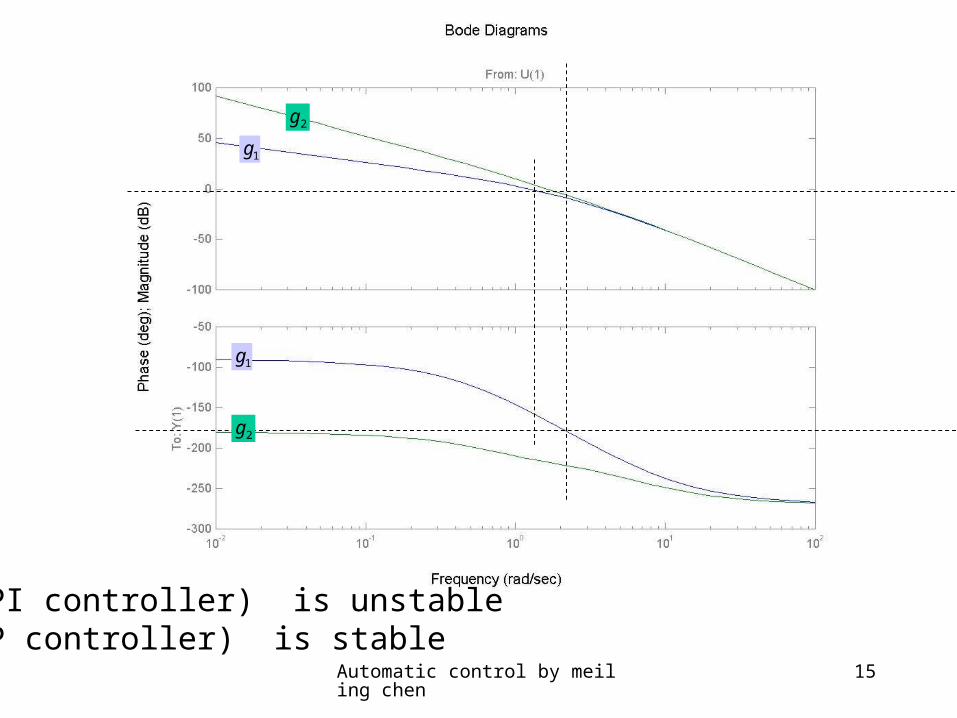
Automatic control by meiling chen 15
1g
2g
g2 (PI controller) is unstable g1 (P controller) is stable
2g
1g
Automatic control by meiling chen 16
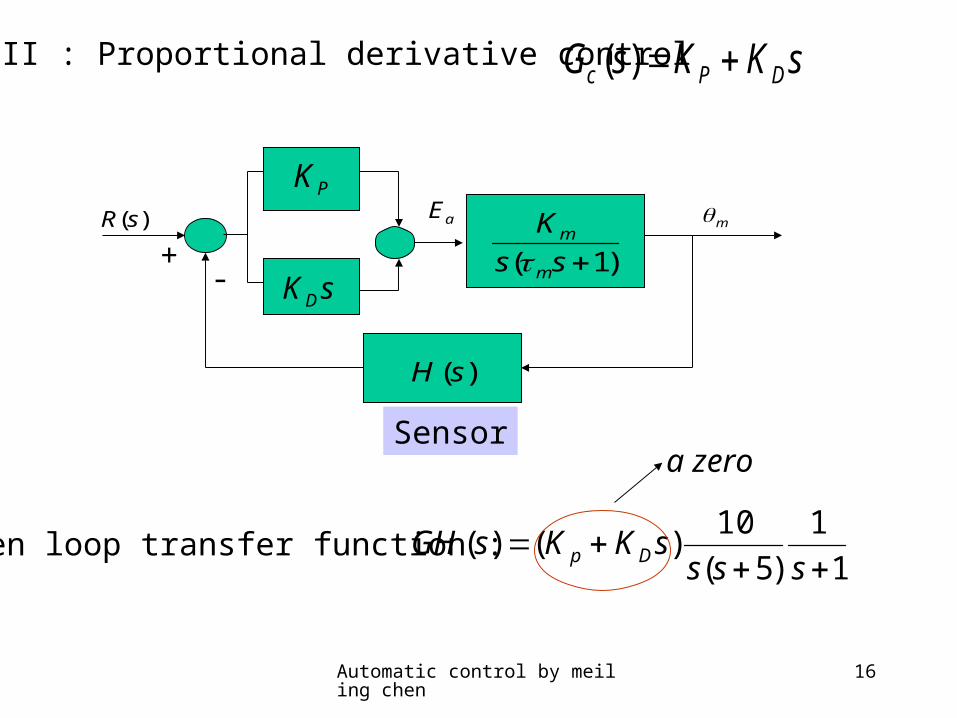
Case III : Proportional derivative control
)1( ss
K
m
m
maE
+-
)(sH
)(sR
Sensor
PK
sKD
sKKsG DPc )(
Sensor
1
1
)5(
10)()(
ssssKKsGH DpOpen loop transfer function :
a zero
Automatic control by meiling chen 17
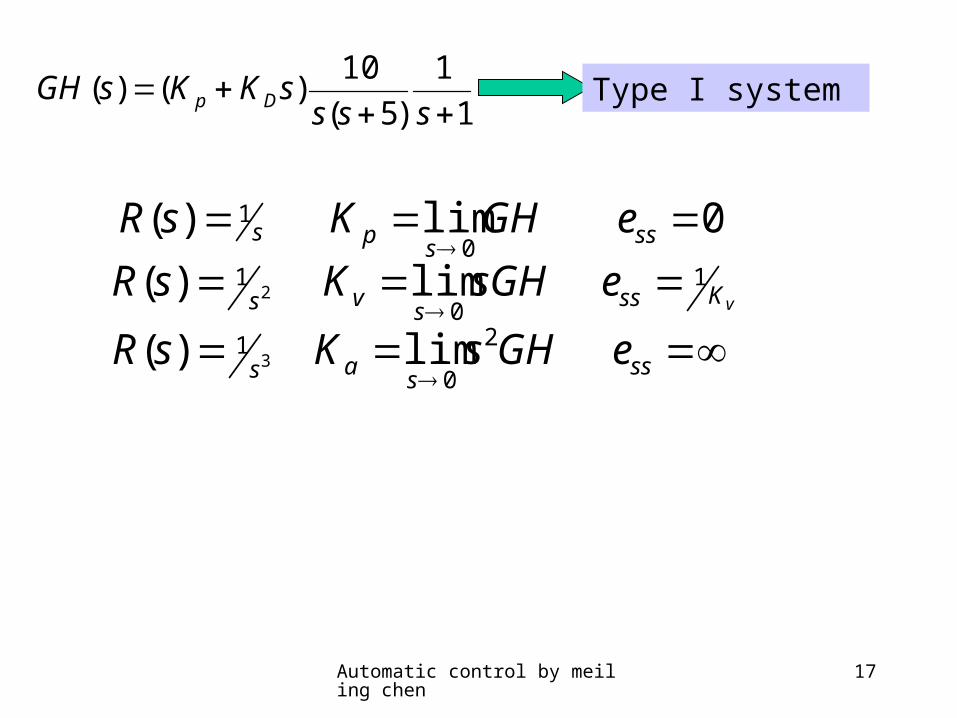
1
1
)5(
10)()(
ssssKKsGH Dp Type I system
sss
as
Ksss
vs
sss
ps
eGHsKsR
esGHKsR
eGHKsR
v
2
0
1
1
0
10
1
lim)(
lim)(
0lim)(
3
2
Automatic control by meiling chen 18
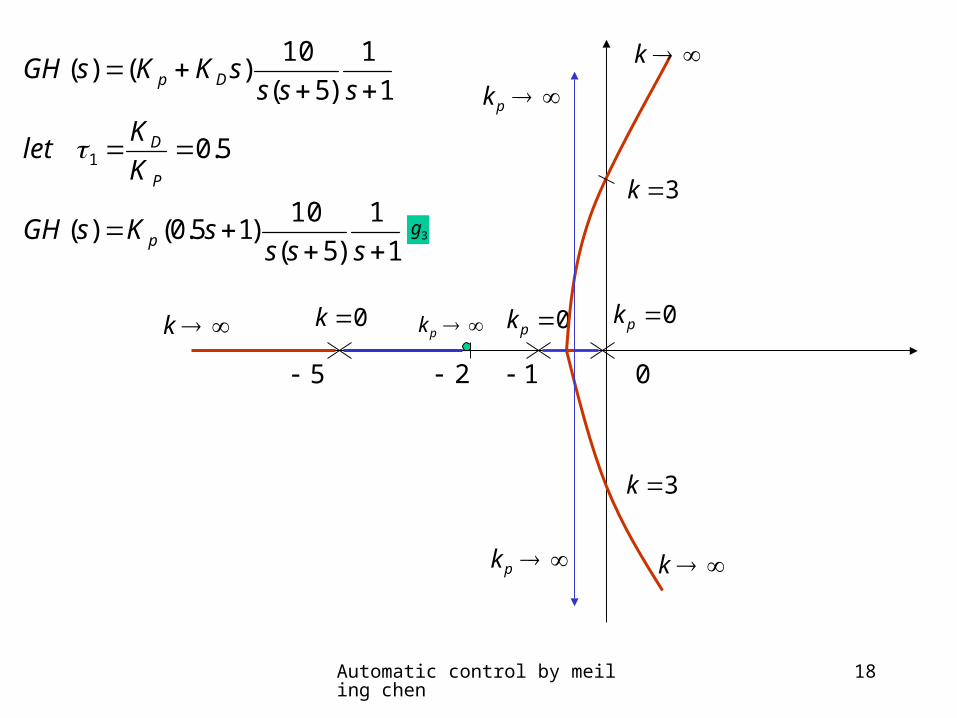
1
1
)5(
10)15.0()(
5.0
1
1
)5(
10)()(
1
ssssKsGH
K
Klet
ssssKKsGH
p
P
D
Dp
5 1 02
0pk0pk0kk
k
k
3k
3k
pk
pk
pk
3g
Automatic control by meiling chen 19
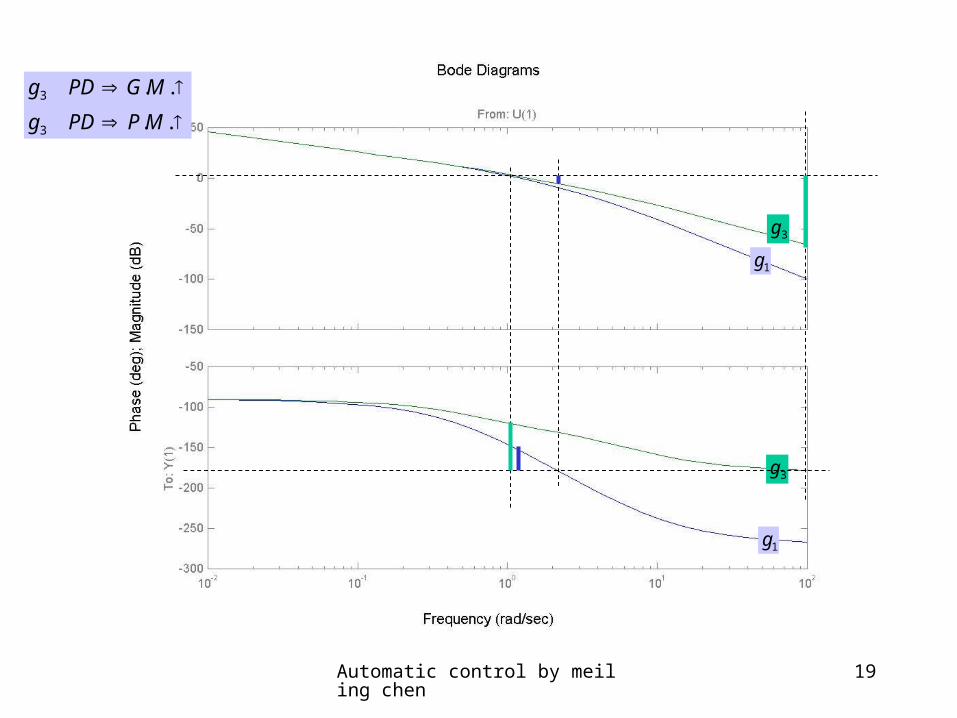
1g
1g
3g
3g
..
..
3
3
MPPDg
MGPDg
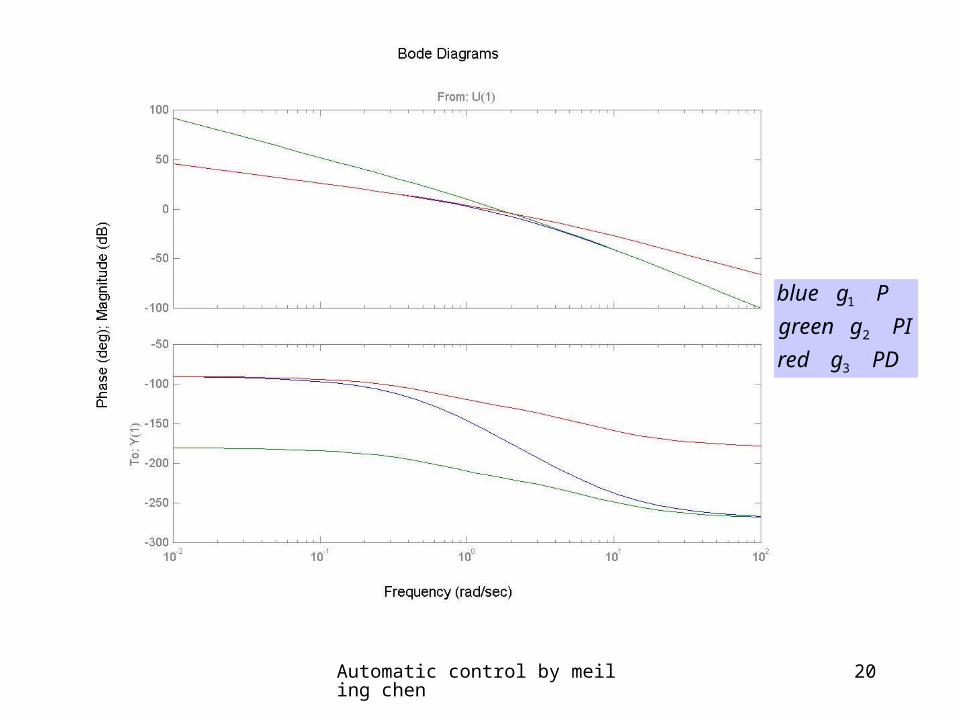
Automatic control by meiling chen 20
PDgred
PIggreen
Pgblue
3
2
1
Automatic control by meiling chen 21
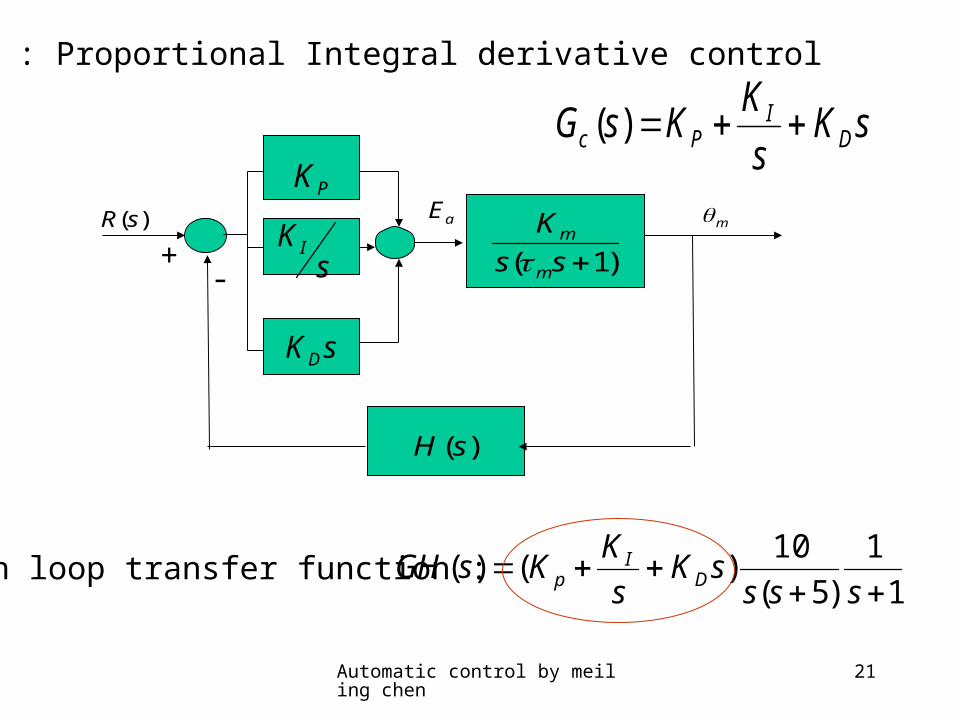
Case IV : Proportional Integral derivative control
)1( ss
K
m
m
maE
+-
)(sH
)(sR
PK
sKD
sKs
KKsG D
IPc )(
1
1
)5(
10)()(
ssssK
s
KKsGH D
IpOpen loop transfer function :
sK I
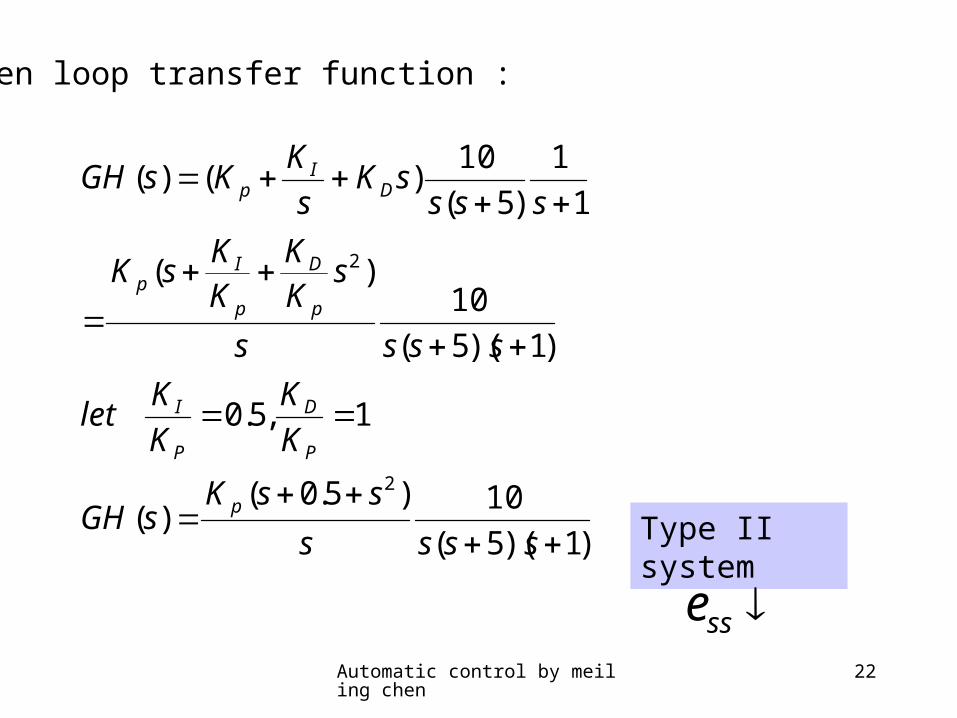
Automatic control by meiling chen 22
)1)(5(
10)5.0()(
1,5.0
)1)(5(
10)(
1
1
)5(
10)()(
2
2
ssss
ssKsGH
K
K
K
Klet
ssss
sKK
KK
sK
ssssK
s
KKsGH
p
P
D
P
I
p
D
p
Ip
DI
p
Open loop transfer function :
Type II system
sse
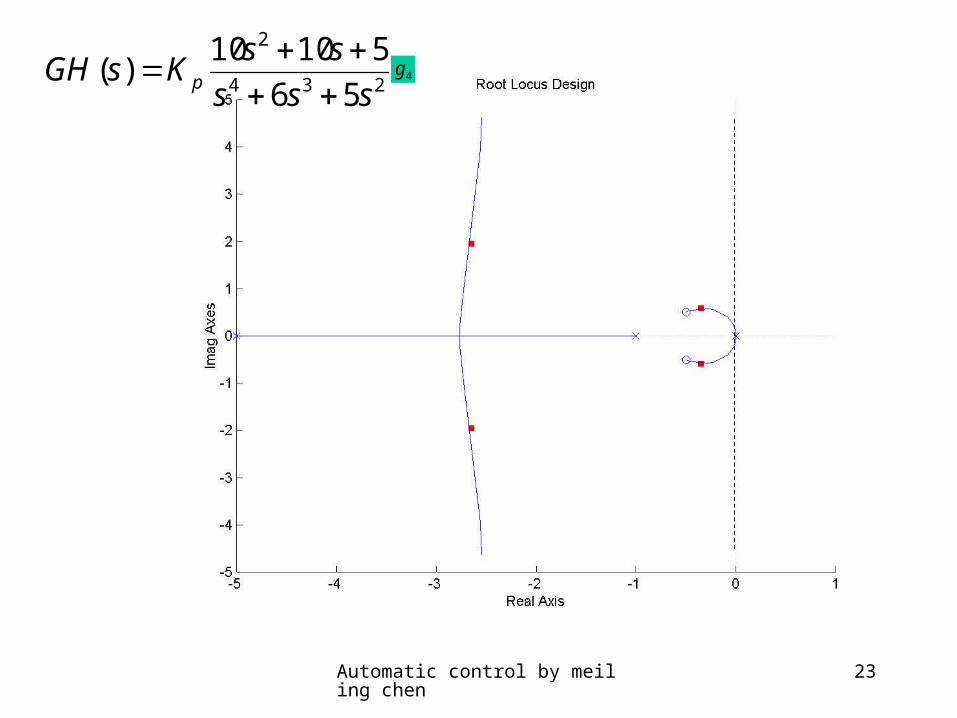
Automatic control by meiling chen 23
234
2
56
51010)(
sss
ssKsGH p
4g
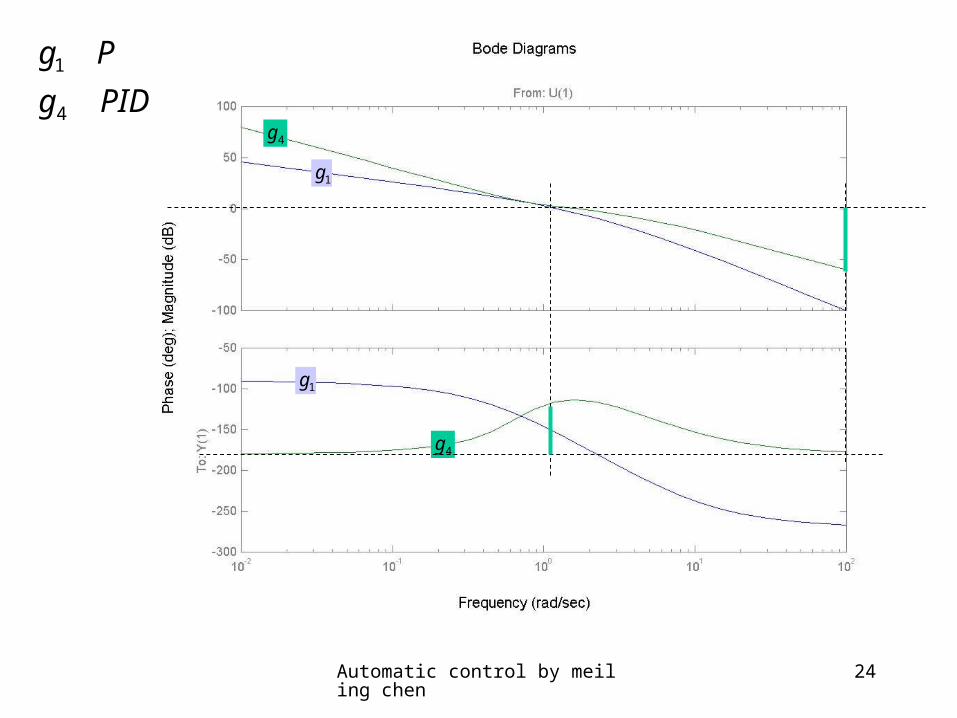
Automatic control by meiling chen 24
PIDg
Pg
4
1
1g
1g
4g
4g
Automatic control by meiling chen 25
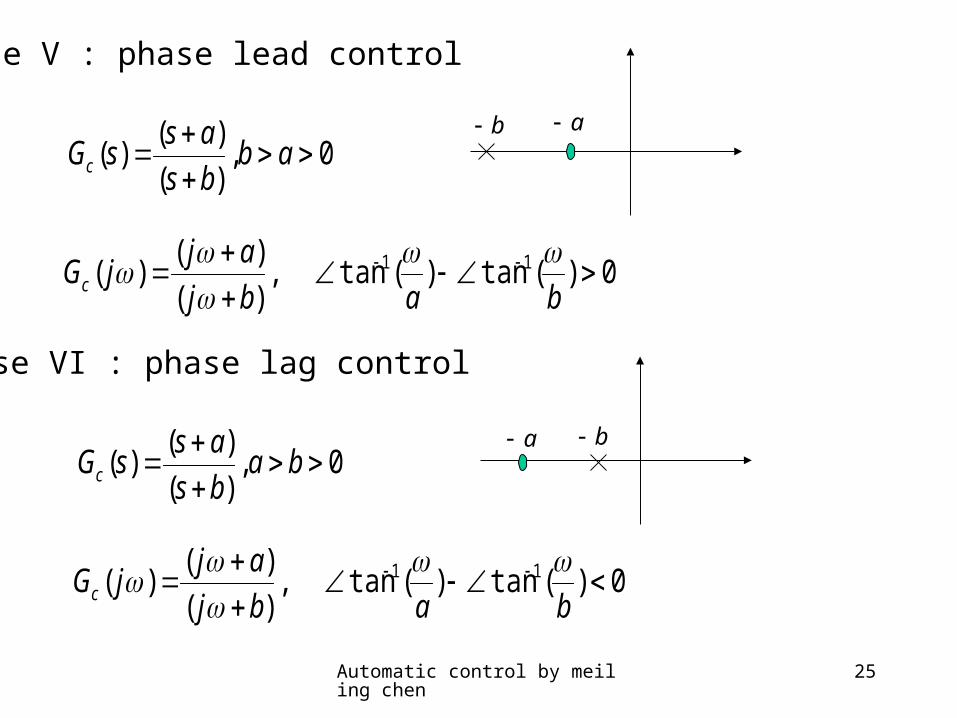
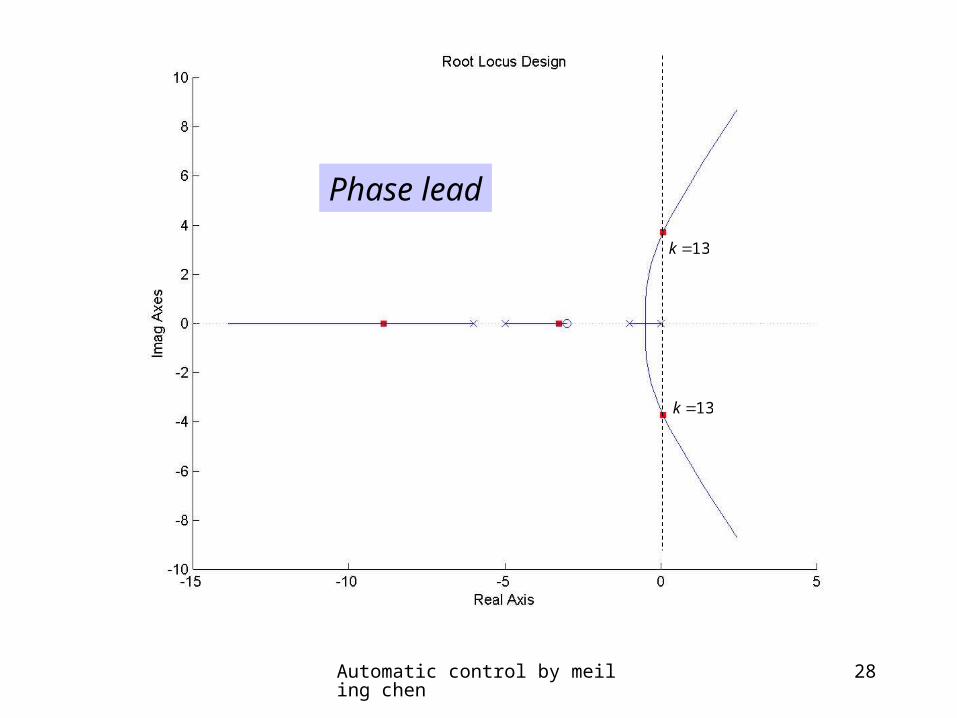
Case V : phase lead control
0,)(
)()(
abbs
assGc
b a
0)(tan)(tan,)(
)()( 11
babj
ajjGc
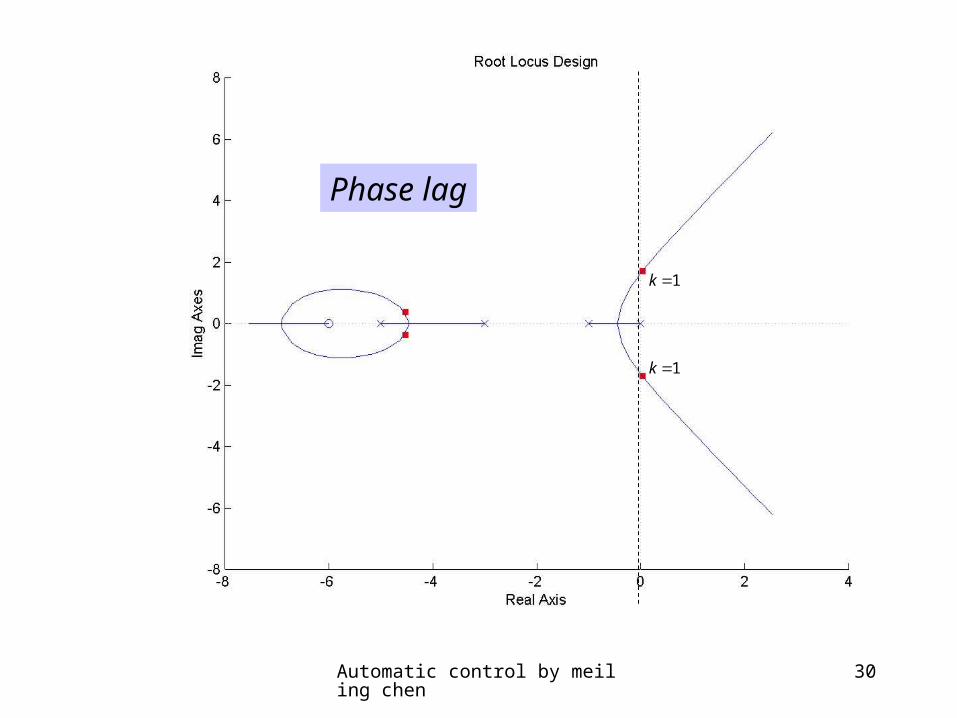
Case VI : phase lag control
0,)(
)()(
babs
assGc
ba
0)(tan)(tan,)(
)()( 11
babj
ajjGc
Automatic control by meiling chen 26
)1( ss
K
m
m
m
aE
+-
)(sH
)(sGc)(sR
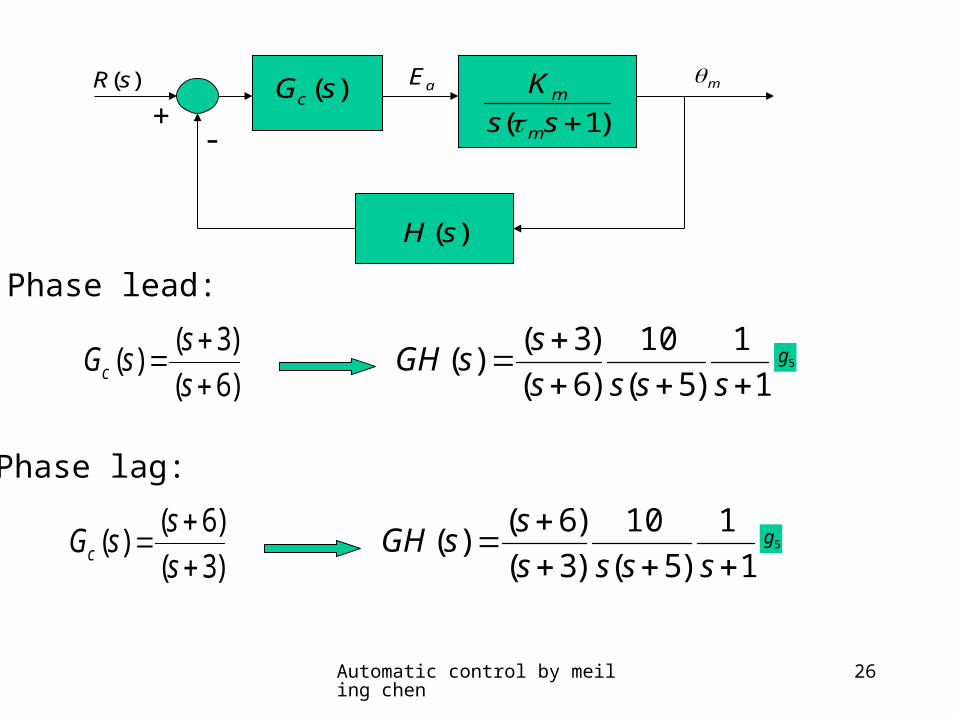
)6(
)3()(
s
ssGc
Phase lead:
1
1
)5(
10
)6(
)3()(
ssss
ssGH 5g
)3(
)6()(
s
ssGc
Phase lag:
1
1
)5(
10
)3(
)6()(
ssss
ssGH 5g
Automatic control by meiling chen 27
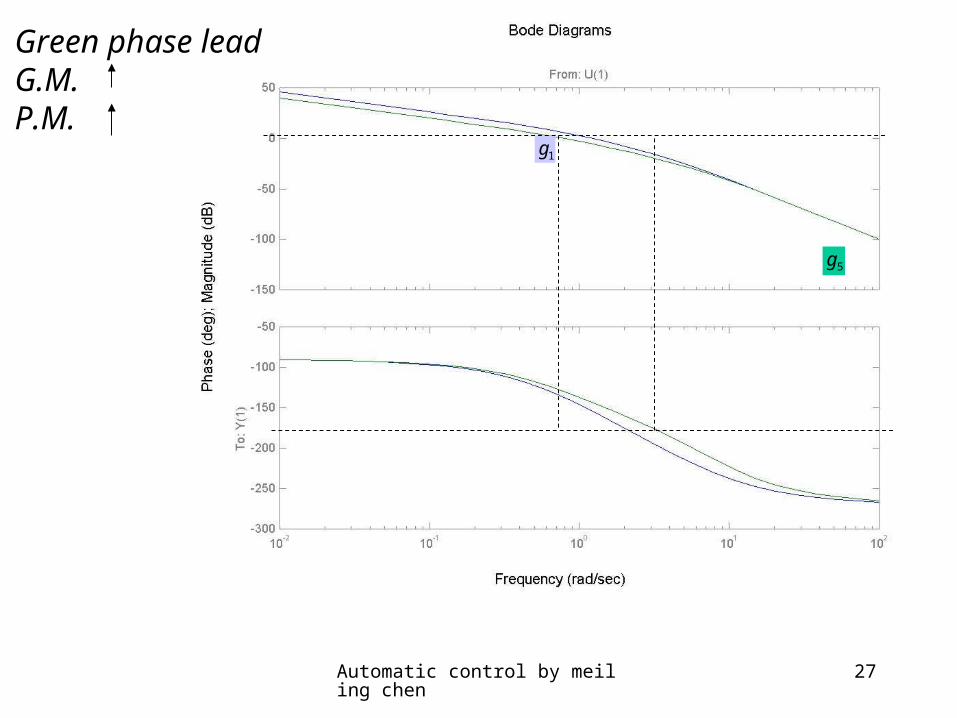
5g
1g
Green phase leadG.M. P.M.
Automatic control by meiling chen 28
13k
13k
Phase lead
Automatic control by meiling chen 29
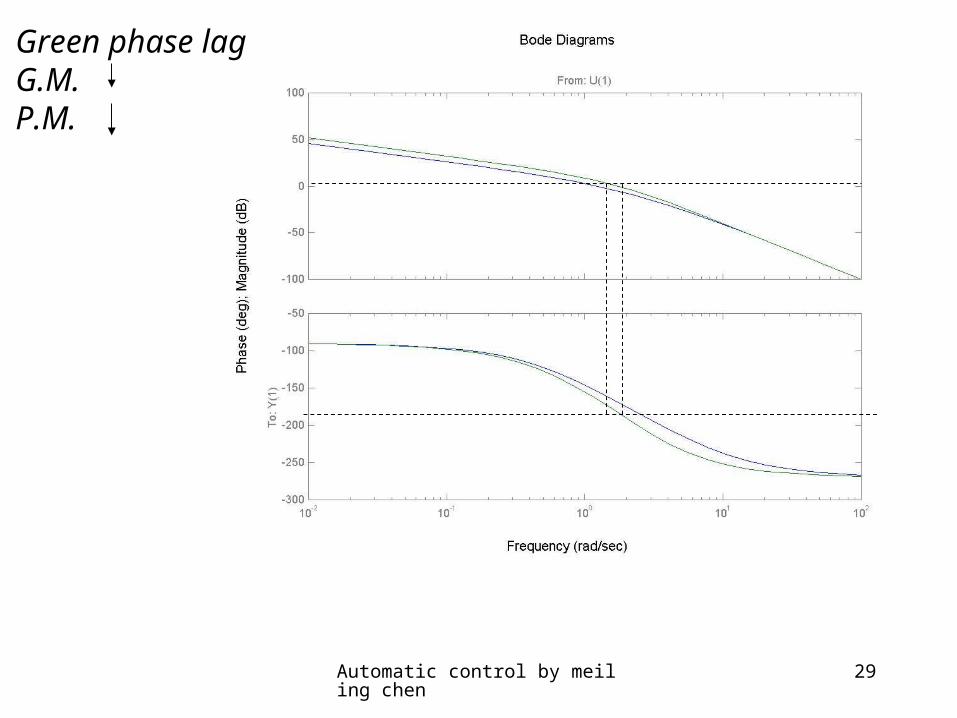
Green phase lagG.M. P.M.
Automatic control by meiling chen 30
1k
1k
Phase lag