Face, gender, ethnic and age group classification systems often work through an alignment, feature extraction, and identification pipeline. The quality of the alignment process is thus central to the perfor- mance of the identification process. Furthermore, missing portions of depth information can greatly affect results. Appropriate image reconstruction is therefore crucial for the correct operation of those systems. This paper presents a simple and effective approach for the automatic alignment and reconstruction of damaged facial depth images. By using only four facial landmarks and the raw depth data, our approach converts a given damaged depth image into a smooth depth function, performs the 3D alignment of the underlying face with the face of an average person, and produces an aligned depth image having arbitrary resolution. Our experiments show that the proposed approach outperforms commonly used methods.
Automatic alignment and reconstruction of facial depth
images
Contents lists available at ScienceDirectPattern Recognition
Lettersjournal homepage: www.elsevier.c om/locate/patrec Pattern
Recognition Letters 50 (2014) 8290
Automatic alignment and reconstruction of facial depth images
q
Giancarlo Taveira , Leandro A.F. FernandesInstituto de Computao,
Universidade Federal Fluminense (UFF), CEP 24210-240 Niteri, RJ,
Brazil
a r t i c l e i n f o
Article history:Available online 12 December 2013
Keywords: Depth image Alignment Interpolation Resampling Face
image
a b s t r a c t
Face, gender, ethnic and age group classication systems often
work through an alignment, feature extraction, and identication
pipeline. The quality of the alignment process is thus central to
the perfor- mance of the identication process. Furthermore, missing
portions of depth information can greatly affect results.
Appropriate image reconstruction is therefore crucial for the
correct operation of those systems. This paper presents a simple
and effective approach for the automatic alignment and
reconstruction of damaged facial depth images. By using only four
facial landmarks and the raw depth data, our approach converts a
given damaged depth image into a smooth depth function, performs
the 3D alignment of the underlying face with the face of an average
person, and produces an aligned depth image having arbitrary
resolution. Our experiments show that the proposed approach
outperforms commonly used methods. For instance, we show that it
improves the quality of a state-of-art gender classication
technique. 2013 Elsevier B.V. All rights reserved.
1. Introduction
The ability to retrieve information from facial depth images has
many practical applications including face recognition, age group
estimation, gender and ethnic group classication. Unfortunately,
depth data is often damaged due to limitations intrinsic to off-
the-shelf depth-image capturing systems. Examples include, but are
not limited to, depth shadowing and the inuence of reective,
refractive and infrared absorbing materials in the scene (Zhu et
al., 2008). Also, the amount of pixels covering the imaged face and
faces orientation often vary from image to image, making difcult or
even impossible the use of captured images without the proper
alignment and reconstruction of depth data (Szeliski,
2010).Virtually every computer vision researcher that needs to
perform alignment and reconstruction of facial depth data usually
presents its own solution to the problem. A well-known technique is
to identify some facial features by curvature, and compute the
alignment based on them (Moreno et al., 2005). Solutions based on
principal component analysis (PCA) have also been proposed (Stormer
and Rigoll, 2008). However, most of the attempts do not make proper
use of depth information while performing the alignment,
restricting the solution to the 2D image plane. Also, lin- ear
interpolation is commonly used to ll the holes (Wu et al., 2010),
leading to unnatural at artifacts on the facial surface.It is
remarkable that the solutions commonly applied in the literature
contradict the common wisdom that appropriate
q This paper has been recommended for acceptance by Dmitry
Goldgof. Corresponding author. Tel.: +55 21 2629 5665; fax: +55 21
2629 5669.E-mail addresses: [email protected] (G. Taveira),
[email protected] (L.A.F. Fernandes).
alignment and resampling techniques must be employed in order to
produce corrected depth images from the original ones. For
instance, it is important to make use of the depth information
intrinsic to this kind of data in order to alignment the structures
of interest (i.e., the faces) in the 3D space, not just on the
image plane. Furthermore, by considering the nature of the surface
of interest, it is clear that it is necessary to apply smooth
non-linear interpolation techniques capable of reconstructing the
damaged portions of the original image and also of producing depth
values with sub pixel precision. With such care, the expectation is
that the performance of depth-based classication techniques may be
improved.This paper presents a simple and effective method for
aligning and reconstructing facial depth images from damaged depth
data in a completely automatic way (Section 3). The approach uses
information extracted from valid pixels to adjust a smooth thin-
plate spline (TPS) interpolating function that naturally
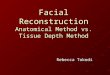
reconstructs the depth information of missing pixels (see Fig. 1)
and computes smooth transitions among existing ones. The approach
also ex- plores facial landmarks in order to determine the actual
position and orientation of the imaged face in the 3D space. The
relation be- tween the set of landmarks in the actual face and a
set of canonical landmarks is used to map the shape of the imaged
face to a stan- dard space where the resulting aligned image is
generated by ray casting the reconstructed surface. The developed
ray casting scheme is derived from the relief mapping (RM)
technique pro- posed by Policarpo et al. (2005) for real-time
rendering of surface details mapped on coarse triangular meshes.
Our approach easily ts into popular processing pipelines, and can
be extended to pro- duce correct color and normal map images to be
used with the resulting depth images.
0167-8655/$ - see front matter 2013 Elsevier B.V. All rights
reserved. http://dx.doi.org/10.1016/j.patrec.2013.12.007
Fig. 1. For the same subject: (a) the original color image, (b)
the original damaged depth image, and (c) the image with
reconstructed depth information produced by our technique. Six
aligned and reconstructed depth images of different subjects are
presented in (d). Images (b), (c) and (d) are presented in
false-color, where dark red pixels denote the surface closest to
the camera. Notice in (c) the smooth transition of depth values in
the originally corrupted portions (navy blue pixels in (b)). (For
interpretation of the references to colour in this gure legend, the
reader is referred to the web version of this article.)
90G. Taveira, L.A.F. Fernandes / Pattern Recognition Letters 50
(2014) 8290
G. Taveira, L.A.F. Fernandes / Pattern Recognition Letters 50
(2014) 829089
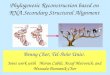
Our experiments (Section 4) show that the approximation errors
produced by our method are smaller than those using linear
interpolation for reconstruction with iterative closest point (ICP)
for 3D alignment of depth data and with 2D alignment of the depth
images (see Fig. 2). We also present a comparative study among four
distinct interpolation methods (nearest-neighbor, linear, nat-
ural-neighbor and thin-plate spline) using the proposed alignment
method in the 3D domain. Each interpolation method was applied as
part of state-of-art gender classication processes proposed by Wu
et al. (2010, 2011). Since the classication techniques receive
surface normals computed from reconstructed facial depth images as
input, the performance of these classication models as a func- tion
of the input images indicate the quality and the inuence of each
interpolation method on the result.
2. Related work
This section discusses the use of TPS on the interpolation of
facial color images, the use of interpolation schemes to resample
facial depth data, and alignment schemes for aligning human body
surfaces.Rosen (1996) developed the Java applet entitled AlexWarp.
Since its creation, the applet has gained popularity among internet
users world-wide for its simple and fast method of facial image
warping. When the user provides one pair of landmark points, the
applet determines the region to warp, warps it, and then out- puts
the warped picture. One major drawback of the AlexWarp ap- plet is
that transformations can only be applied one at a time. The
AlexWarp applet works on colored images in the 2D domain with a
limited number of control points.
Whitbeck and Guo (2006) implemented an applet as an improvement
over the AlexWarp program. In their implementa- tion, TPS was used
to allow more control points to be added instead of just one pair,
as in the AlexWarp. The TPS was applied in a 2D do- main in order
to interpolate warped colored images. In our work, we use TPSs on
depth images. We use all points from the original depth image and
do not intend to apply warping to the data.Guo et al. (2004)
created an average morphable shape repre- sented by a TPS to be
used in face recognition applications. The average face was created
using a database of 60 individuals (33 males and 27 females)
containing only records of asian people which resulted in a model
restricted to a particular ethnic group. The facial landmarks, a
total of 7, were manually set. In order to reconstruct the face of
a subject, they projected the colored 2D im- age over the average
3D model. A reduced number of control points and the usage of a
single TPS are some of the limitations of their work. The authors
reported that the results, although not great, showed an
interesting potential. In our work, we use several TPS functions to
build a different 3D model for each subject. Also, we developed an
adaptive block scheme in order to allow the use of all depth values
of the image pixels while performing the recon- struction of
damaged depth information.Moreno et al. (2005) developed a 3D face
modeling system and used two face recognition methods to test their
model, one based on PCA and another one based on support vector
machine (SVM). Their system aims to work on face images with
varying poses, in situations where there is no control over the
depth data acqui- sition. They reported that median and Gaussian
lters were applied in the pre-processing stage in order to remove
noise and to smooth the curvature of the resulting surfaces.
Instead, we propose the use
180180120
160160Proposed Approach ICP + Linear
100Proposed Approach ICP + Linear
1401402D + Linear2D + Linear
Proposed ApproachICP + Linear2D + Linear120
12080
Subjects100
80
SubjectsSubjects1006080
606040
4040202020
00 0.1 0.2 0.3 0.4 0.5 0.6 0.7 > 0.8
00 0.75 1.5 2.25 3 3.75 4.5 5.25 > 6
00 0.75 1.5 2.25 3 3.75 4.5 5.25 > 6
Squared error
Squared error
x 104
Squared error
x 105
Fig. 2. Histograms showing the distribution of (a) minimum, (b)
mean and (c) maximum squared error values computed from the depth
values of a reference image and images produced using the proposed
alignment and reconstruction approach (blue), a common 3D ICP-based
alignment method with linear reconstruction (green), and a common
2D alignment technique with linear reconstruction (red). Notice
that the error values of the proposed approach are smaller than
those of the common approaches. (For interpretation of the
references to colour in this gure legend, the reader is referred to
the web version of this article.)
of a TPS-based interpolation scheme combined with a RM-based ray
casting technique to reconstruct missing portions of data as smooth
surface patches.Stormer and Rigoll (2008) proposed a procedure
consisting of facial feature hypotheses extraction by invariant
curvature fea- tures, PCA-based classication, and iterative closest
point align- ment to create aligned and normalized patches of faces
in range images. They nd the facial features by pre-processing the
spatial discrete data and apply linear interpolation and low-pass
lter to get a closed and smooth surface. Their nal results are
patches that contain a minor portion of the eyes and nose to serve
as input to a classication system. Their alignment and
normalization proce- dure is not very accurate since they use an
iterative approach that approximates the facial features by simple
square distance nearest neighbor. The use of linear interpolation
is also adopted by other face classication systems, including
state-of-the-art gender classi- cation techniques (Wu et al., 2010,
2011). It is important to noticethat the interpolating surface of
the linear method is C0 continu-ous. We propose the use of a
TPS-based interpolation scheme that produces C1 continuous
surfaces. Also, in contrast with Stormers et al. approach, we
perform non-iterative 3D alignment using only four facial
landmarks.Segundo et al. (2012) presented a method for pre-aligning
sur- faces and to better nd a correspondence of keypoints between
two objects. They had also developed a system that automatically
detects incorrect results, removing the need of manual human
inspection. The authors used speeded up robust features (SURF) to
nd the correspondence between a single objects data obtained from
different views. They also used SURF to nd the transforma- tion
matrix to project the geometric data into the color
information.
the rectangular region that contains the face of the imaged
person (Section 3.1). Then, we adaptively subdivide the cropped
region into smaller regions where TPSs are adjusted to the depth
data in each of them (Section 3.2). The TPSs not only guarantee
smooth interpolation of depth data while producing the nal image
but also provide the reconstruction of damaged and missing portions
of depth information. In the third step, we use afne transforma-
tions to perform the 3D alignment of the landmarks of the given
face with the landmarks of the face of an average person (Sec- tion
3.3). Lastly, by applying the same transformations to the TPSs, we
map the input face to a standard space in which we held ray casting
in order to produce an aligned facial image having arbitrary
resolution (Section 3.4).Section 3.5 describes how the parameters
of the average person can be obtained from the images in the
dataset. Section 3.6 dis- cusses how to transform the raw color
images and how to produce normal maps that are consistent with the
resulting depth images.
Image cropping
We dene the axis-aligned cropping rectangle that contains the
face by using the image coordinates uno ; vno T of the nose (no)
aspivot point, and the horizontal distance dle;re between left (le)
and right (re) eyes outer corners and the vertical distance dno;ch
be- tween imaged nose and chin (ch) as parameters for computing,
respectively, the width and height of the resulting sub-image (Fig.
3). The lower and upper corners of the cropping rectangle are
expressed as:
Azouz et al. (2004) proposed a 3D human model that is based
on
. max uno uD; 1 .
. min uno uD; wac .
signed-distance for shape analysis. They used PCA to obtain
generic
C
max v
v ; 1
and C ;
human characteristics. Their representation model lacks a good
pre- processing stage as they only apply Taubin lter to remove
noise in the data and no alignment procedure is performed. PCA and
ICP were
no D
min vno vD; hac
1
used in the work of Yan and Bowyer (2005). The authors compared
different approaches to ear recognition, both 2D and 3D. Ear recog-
nition is particularly relevant in the eld of biometrics. They
report that an ICP-based approach outperformed every other results.
Kak- adiaris et al. (2007) presented an unied software and
hardware
where wac and hac are, respectively, the width and height of the
in- put image having pixel coordinates u 2 1; wac ] and v 2 1; hac
]. uD and vD are computed, respectively, as:
duD min .d1:5 dle;re=2e; wac uno . and2
solution for 3D face recognition. They used a variation of ICP
foraligning the images but proposed the use of deformable model
tting(DMF) for subsampling depth data. The original ICP method is
de-
vD min . 1:5 dno;ch e; hac vno .;
3
scribed by Besl and McKay (1992). In Section 4 we compare our
face alignment approach against an ICP-based scheme.Xu et al.
(2009) presented a promising way to build a robust rec- ognition
system integrating depth and intensity information. Although their
face recognition classier is robust, their preprocess- ing stage is
very poor. Therefore, their results could be improved by applying a
more sophisticated alignment and reconstruction meth- od. Our
experiments show that our face alignment and reconstruc- tion
scheme may be used to improve gender classication processes.
Tekumalla and Cohen (2004) used a method based on the mov- ing
least squares (MLS) projection to ll holes in triangular meshes.
Wang and Oliveira (2003) also used MLS as a hole-lling approach.
This approach, although efcient to implement, can only handle holes
of simple geometry that resemble a plane since it relies on
parameterizing the vicinity of the hole by orthographic projection
onto a plane. Our hole lling procedure, on the other hand, is inde-
pendent of the structure of a mesh. It uses the point cloud as
inputand it ts a smooth surface to the input data.
3. The proposed alignment and reconstruction approach
The computation of the aligned facial depth image consists
offour main steps. First, we take the input raw depth image and
crop
where d:e denotes the ceiling function. The proportion value 1:5
was empirically chosen for our experiments.It is important to
emphasize that dening a sub-image using a cropping rectangle is an
optional step of our approach. By limiting data to the sub-image
that contains the region of interest (i.e., the subjects face) we
do alleviate the computational cost of subse- quent steps.
Furthermore, the cropped image does not have to be perfectly
symmetrical to the imaged face because the actual align- ment
procedure will be performed by the nal steps of our algo- rithm
(see Sections 3.3 and 3.4). Also, the produced cropping rectangles
may have different resolutions, since their dimensions are
proportional to distances in a given input image. The only
requirement for a sub-image is to contain the face of the subject.
Therefore, the empirical scaling factor of 1:5 used in (2) and (3)
may be changed in order to t the images of different databases.
However, we emphasize that the scale factor of 1:5 met our
requirements well, even for faces covering different portions of
the images.The location of the eyes, nose and chin is usually
provided by the image database (e.g., the UND Biometric Database,
Collection D (Chang et al., 2003)). They can also be retrieved by
automatic techniques (Romero-Huertas and Pears, 2008; Perakis et
al., 2009) or manually identied.
Fig. 3. Image cropping. (left) A grayscale visualization of an
original depth image (640 480) before any cropping is done. The
distances dle;re and dno;ch are proportional to the cropping
rectangle. (right) A scaled example of a cropped image (195 293).
See (1) for details. Lighter shades of gray correspond to points
closer to the camera.
Depth data interpolation and reconstruction
Depth data interpolation and reconstruction is performed using
TPSs adjusted to raw depth data. TPS is the 2D analog of the cubic
spline in one dimension (Bookstein, 1989). It encodes a scalarT
height function that can be evaluated at a given u; v
coordinate
in order to retrieve the respective scalar value z that best
describes the height surface passing through N non-overlapping
controlpoints having coordinates u; v; zT . In this paper, u and v
are coor-dinates of valid pixels (i.e., pixels storing valid depth
information), and z is the associated depth value. It is important
to notice that a TPS is adjusted to an unstructured set of control
points, and alsoT
that it can be evaluated at any real valued u; v
position, return-
ing a smoothly interpolated z value. Thus, it is clear that
sub-pixel sampling and damaged facial depth reconstruction are
naturally handled by the TPS-based interpolation scheme adopted in
our work.A TPS is described by 2 N 3 parameters, which include six
global afne motion parameters and 2 N coefcients for correspon-
dences of the control points. These parameters are computed by
solving a linear system having a closed-form solution. Due to the
large number of parameters, the computation of a single TPS to all
valid pixels in a cropped image may be unfeasible. We avoid such an
issue by dividing the cropped image into adaptive blocks having a
small number of control points, and t a different TPS to each one
of the blocks. Such an approach has two advantages:(i) it allows
our technique to handle images having arbitrary size; and (ii) the
procedure is less prone to numerical instability.
Fig. 4. An example of how the blocks in the last row and in the
last column may be smaller in size than the rest of the blocks in
the image. In the proposed algorithm, each block may independently
grow in size until enough control points are within its boundaries
(see the blocks in the lower right corner of the image).
dened in the standard space (i.e., the 3D space where all faces
will be aligned). The transformation for a given imaged face is
com- puted from the location of four landmarks in the actual
coordinate frame (namely, left eye (le), right eye (re), nose (no)
and chin (ch)) and the equivalent locations in the standard
coordinate frame. Inthe following equations, each location is
represented by a point
The adaptive blocks are initially distributed uniformly over
thecropped image as a regular grid comprised by square entries
hav-
PS;F
, where S is ac or st for, respectively, actual or standard
frames,
and F is one of the labels in fle; re; no; chg.
ing xed size (most blocks in Fig. 4). However, since depth
datamay be damaged, some of the blocks may not contain enough con-
trol points to dene a TPS. In such a case, we incrementally
change
The coordinates of Pac;F
Tage as:
are computed from the input depth im-
the size of an ill-dened block by including a ring of
surrounding pixels in it. An ill-dened block grows until it has
enough valid pix-
Pac;F .x
ac;
F ; yac;F ; z
ac;F .
zac;
. 1
KF
Q ac;F
.;4
els to solve the linear system of equations that computes the
coef-cients of the TPS (see the blocks in the lower right corner
of
where Q ac;F
u ; vF
; 1
is the location (in pixels) of the given la-
Tzac;F
FFig. 4). The TPS assigned to a block ts the points covered by
the
bel point in image space,
is the depth retrieved from the
T1original block size and the points inside the overlapping
region.
uF ; vF
pixel, and Kis the inverse of the matrix that models
However, after the TPS has been tted, the evaluation of the
smooth surface related to a block is performed only inside the
original coverage of that block.
Three-dimensional face alignment
The alignment stage computes the afne transformation that maps a
face dened in the actual space (i.e., the 3D space where the imaged
face resides) to a standard position and orientation
the intrinsic camera parameters:0 f mucou 1
A@KB 0f mv ov C:5001
In (5), f is the focal length, mu and mv are the scale factors
relatingpixels to distance, c; ou and ov represent the skew and the
coordi- nates of the principal point, respectively. The intrinsic
parametersare usually provided by the depth camera, but they can
also be re- trieved from calibration procedures (Hartley and
Zisserman, 2000).
The formulas for computing the 3 3 matrix M and the 3 1 offset
vector O modeling the intended afne transformation is gi- ven
by:
3.5. Computing the average person
The average person is dened in the standard space. It is used as
target-face during the face-alignment stage of our procedure. In
or-
;M Q P1 and O Pst le MP
ac;le
;6
der to setup an average person one needs to specify the
locationPst;F of the four face landmarks. In our experiments we
computed
where P and Q are 3 3 matrices computed as:
P Pac;re Pac;le Pac;no Pac;le Pac;ch Pac;le ;7Q Pst;re Pst;le
Pst;no Pst;le Pst;ch Pst;le :8
The procedure for computing Pst;F is presented in Section
3.5.Once M and O are known, the afne mapping of a general point
the coordinates of Pst;F from average values retrieved from the
in- put dataset. However, one can place the landmark in the way
that is most convenient for a particular application.We build a
mean tetrahedron from the tetrahedra dened by the landmarks of each
input face. The base of such tetrahedra was dened by the location
of both eyes and chin. The apex was set to be the nose. The
vertices were computed as:
Pac in the actual space to the standard space is given by:
1Pst;le
0 wst leye 1
1B hst lchin C; Pst;re
0 wst leye 1B hst lchin C;
Pst MPac O:9
2 @A00wst11
2 @A00wst11
3.4. Producing the nal depth image
Pst;ch 2 B hst lchin C
2 B hst l
2 lC
The nal depth image of a given face is computed by casting
@A; Pst;no @0
chin2 ltip
nose A;
rays (one ray per resulting image pixel) from a pinhole camera
de- ned in the standard space to the surface of the subjects face
mapped from the actual coordinate frame to the standard coordi-
nate frame (Section 3.3). Due to space restriction, this paper does
not present the proposed ray casting procedure in detail. However,
it can be derived from a well-known rendering technique: the re-
lief mapping (RM) (Policarpo et al., 2005).The central idea of our
ray casting procedure is to use RM to quickly nd the rst
intersection of each casted ray and the surface encoded by the set
of TPSs (Section 3.2). Once the rst intersection is found for a
given ray, the z coordinate of the intersection point in cameras
coordinate system is stored in its respective image pixel. As in
RM, we start the process with a linear search. Beginning at the
center of projection O, we step along the ray passing through the
current pixel mapped to the image plane in the 3D space
atincrements of d looking for the rst point inside the surface.
Oncethe rst point under the TPS surface has been identied, the
binary search starts using the last point outside the surface and
the cur- rent one. The role of the linear search is to quickly
approximate the rst intersection between the casted ray and the TPS
surface. The role of the binary search, on the other hand, is to nd
the exact location of such an intersection.Recall from Section 3.2
that the original surface of the face was encoded into a set of
TPSs that dene a height eld in the actual coordinate frame.
Rendering such an analytical 3D representation from an arbitrary
point of view may be tricky since the depth infor- mation cannot be
transformed from the actual coordinate frame to the standard space
with the guarantee that it will be an unambig- uous height map
after such mapping. The use of RM as the ray cast- ing approach for
solving the problem is an elegant solution because it turns the
harder problem of nding the intersection of the ray with the
analytical surface in 3D into the simpler problem of walk- ing in
the 2D domain of the height eld function while looking for the
intersection in its codomain. To do that, one has to: (i) map the
whole situation of the ray casting procedure (i.e., the cameras
cen- ter of projection Ost and pixels points Q st in the image
plane) fromthe standard space to actual space by inverting (9):
where wst and hst are, respectively, the width and height of the
(standard) resulting image, leye is the mean distance between the
eyes of faces in the dataset, lchin denotes the mean distance from
the chin to the middle of the eyes, lnose is the mean distance
fromthe orthogonal projection of the nose onto the base plane and
the middle of the eyes, and ltip denotes the mean distance from the
nose tip to the base plane. These distances were measured in the3D
coordinate frame where each input face resides.
3.6. Producing correct color and normal map images
The computation of correct color and normal map images to be
used with the aligned depth images is straightforward. The color
information related to the rst intersection of the casted ray and
the surface encoded by the TPS can be retrieved from another TPS
encoding the color of input image pixels. By doing so, one guar-
antees a smooth interpolation of color values as well as the recon-
struction of missing portions of color information. The normal
vectors for the normal map can be retrieved directly from the TPS
encoding depth data by computing the normal of the surface at the
intersection point.
4. Experiments and discussion
We have implemented our technique using C++ and MATLAB. The C++
code was compiled using Microsoft Visual Studio as dynamic link
libraries (DLLs) so that they could be called from MATLAB. OpenMP
was used to explore parallel computing in TPS computation. The
system was tested on several real depth images. We have applied our
method to the UND Biometric Data- base (Collection D) (Chang et
al., 2003). This dataset is comprised by 953 images of 277
individuals, recorded using the Minolta Vividseries 3D scanner. The
UND database has the advantage that it con- tains the 2D color
images, the corresponding range images, and the location of the
facial landmarks in image space.In our experiments, we set the
initial size of the adaptive blocks where TPSs are adjusted
(Section 3.2) to 32 32. The number of blocks depends on the size of
the cropped image (Section 3.1).
Pac M1 Pst O;
The resolution of the nal images was set to wst
hst
118. How-
(ii) nd the rst intersection point using our RM-based ray
casting procedure, (iii) map the intersection point back to the
standard space using (9), and (iv) compute the nal depth value as
the signed distance between the Ost and the intersection point.
ever, it is important to notice that our approach can produce
smooth images having any resolution. The location of the facial
landmarks in the input images was retrieved from the database. We
have found the following mean values (expressed in millimeters)
while dening the average person (Section 3.5):
leye 101:3238; lnose 40:0234; lchin 104:3238, and ltip 38:2279.
Notice that those values are consistent since they are pro-
portional to the average subjects face. Hence, they could be used
without change by any application where our technique could
beapplied, even by those that process a different dataset. The syn-
thetic pinhole camera (Section 3.4) was placed 1750 mm apart from
the base plane of the mean tetrahedron, with optic axis coin-
ciding with the displacement vector of the nose and having its x
and y axes aligned, respectively, to the x and y axis of the
standard coordinate frame.We compared our results to a widely used
approach based on 2D alignment with linear interpolation. In this
approach, we rst lled the missing portions of depth information
using a linear interpolation method provided by MATLAB. In turn, we
appliedthe transformation matrix to align the triangle dened by the
points Q ac;le ; Q ac;re and Q ac;no to the same standard
coordinates presented in Section 3.5. Both operations can be
performed bythe imtransform function using the bilinear
interpolation scheme (see MATLAB documentation for details). The
sum of the square differences in the z values was calculated for
both meth- ods. We compared different recordings of faces belonging
to the same subject, since their alignment should match better than
withother subjects faces. Every recording of a subject was compared
against the other recordings of the same subject, and we took the
minimum, mean and maximum squared error values produced. Our
analysis covered 180 subjects. A histogram showing the min- imum,
mean and maximum values for each subject can be seen in Fig. 2. The
gure also presents the errors produced by aligning the depth data
in 3D by using an ICP-based solution, followed by linear
interpolation of the surface for reconstruction. We used the ICP
implementation provided by the Point Cloud Library in our
experiments. The guess transformation matrix was computed from the
centroid of the source and target point clouds and from their
eigenvectors. The same alignments were achieved by using the facial
landmarks to compute the guess transformation matrix. It is
important to comment that, in our approach, the larger errors are
gathered mostly on the neck region (outside the face). With the
common 2D and sometimes with the common 3D approaches, the errors
are scattered all over the image. By analyzing just the nose region
(Fig. 5), the maximum error produced by our method in this database
becomes two orders of magnitude smaller than the error produced by
the common approaches.Our alignment procedure is dependent on the
identication of facial landmarks in color images. We have veried
the robustness of the proposed approach against errors in the
detection of the eyes outer corners, nose tip and chin by adding
noise to the image
We also performed an experiment that compared four distinct
interpolation methods (i.e., nearest-neighbor, linear, natural-
neighbor and TPS) applied as part of gender classication models
presented by Wu et al. (2010, 2011). We chose to use two of the
three gender classication models provided by Wu et al.: Principal
Geodesic Analysis (PGA) and Supervised Weighted PGA (SWPGA).
Further details on PGA can be found in Wu et al. (2010). The SWPGA
is described in Wu et al. (2011).The SWPGA method relies on the
proper setting of the parame- ter d, which indicates the number of
features (i.e., relevant dimen- sions of the facial feature space)
to be used during the iterative construction of the weight map, and
in the number of interactions. In our experiments we followed Wu et
al. (2011) and chose d 5 and set the number of iterations to
6000.The performance of the interpolation methods used to provide
input data for the gender classication techniques was measured by
comparing the confusion matrix (Kohavi and Provost, 1998) and the
Matthews Correlation Coefcient (MCC) (Matthews, 1975) of each
technique under the k-fold cross-validation frame- work (Kohavi,
1995). The image set used for both training and test- ing was
comprised of 180 images (90 females and 90 males) from different
individuals. Although each subject may have several dif- ferent
images in the dataset, only one image per subject was used during
the tests. In this way we avoid bias caused by duplicated
individuals.The cross-validation was run with k 5 folds. Therefore,
each fold contained 36 subjects (18 females and 18 male). At each
round, one fold was reserved for testing and the others were used
for training. After all rounds have nished, the measured statistics
are averaged by the number of rounds.The gender classication can be
interpreted as a binary classi- cation. For that matter, it is
necessary to t the two genders within two classes: Female and Male.
The following nomenclature is used to refer to the cells of the
resulting confusion matrix: true females (TF) are the females
identied as such, true males (TM) are the males identied as such,
false females (FF) are the males incorrectly classied as being
females and false males (FM) are the females incorrectly classied
as being males. The confusion matrix pro- vides information about
the number of correct classications in comparison to the predict
classications for each class. Using the aforementioned naming
convention, we calculated four distinct measurements: accuracy,
true females rate (TFR), true males rate (TMR) and the MCC.The
accuracy is the proportion of true results (both TF and TM) in the
population. The accuracy can be calculated as follows:
TF TM
location of ducial marks provided by the database. In turn,
wecompared every noisy recording of a subject against the other
accuracy TF
FF
FM
TM :10
noisy recordings of the same subject. Fig. 6 presents the
histograms of minimum, mean and maximum squared error values
produced for each of the 180 subjects regarding the original
location of the landmarks, and after adding Gaussian noise with
mean 0 and stan-dard deviation (r) ranging from 1 to 5. The
histogram in Fig. 6a
TFR measures the proportion of actual females which are
correctly identied as such. Similarly, TMR measures the proportion
of males which are correctly identied. A perfect predictor would be
de- scribed as 100% TFR and 100% TMR. The TFR and TMR are described
as:
shows that the Gaussian perturbations did not affected the
mini-mum error produced for each subject. Notice that squared
errors values are virtually zero even for r 5. The comparison
between
TFR TF
TFand TMR FM
TM TM FF
:11
Figs. 6b and 2b show that the distribution of mean squared
errors is more favorable for the proposed approach with imprecise
land-marks location than for the ICP-based alignment with linear
inter- polation. The distribution of maximum errors produced for r
5(Fig. 6c) is equivalent to the one produced for the ICP-based ap-
proach (Fig. 2c). Given that the mean size of cropped regions inthe
database is 280 200 pixels and r 5 leads to errors of upto T15
pixels, we conclude that using detected facial landmarks for
aligning faces is a feasible solution even in the presence of
noise.
By looking at (11), TFR can be interpreted as a bias towards
female classication or the capacity of correctly identifying the
female gen- der. Similarly, TMR can be interpreted as the bias
towards male classication or the capacity of correctly identifying
the male gender.The MCC (Matthews, 1975) is in essence a
correlation coef- cient between the observed and predicted binary
classications. A coefcient of 1 represents a perfect prediction, 0
means no bet- ter than random prediction and 1 indicates total
disagreement between prediction and observation.
2D Alignment+ Linear Interpolation3D ICP Alignment+ Linear
Interpolation9.08.07.0
5.04.03.0
2.6
2.4
2.0
1.8
2.2
2.0
1.8
1.6
1.4
1.2
5.5
Min.: 0.00 | Max.: 412.33> 600500Min.: 0.00 | Max.:
424.98> 600500Min.: 0.00 | Max.: 449999..4444> 600500Min.:
0.00 | Max.: 495.58>
60050040040040040030030030030020020020020010010010010000001200Min.:
29.41 | Max.: 2470.181000Min.: 0.00 | Max.: 579.37> 600500Min.:
0.01 | Max.: 11004455..2222> 600500Min.: 0.00 | Max.: 525.57>
6005008004004004006003003003004002002002002001001001000000x 103x
104x 104x 103Min.: 2724.35 | MMax.: 111556699..776611.0Min.:
117104.28 | Max.: 30507.773.0Min.: 11723.75 | Max.:
26391.082.66.0Min.: 1873.29 | Max.: 6000.9810.02.82.45.04,54.0
3.02.52.0
Fig. 5. Color visualization of the squared error on the nose
region. (top) Using our method. (center) Using ICP for 3D alignment
and linear interpolation. (bottom) Using 2D alignment and linear
interpolation. Notice the difference of maximum error values. (For
interpretation of the references to colour in this gure legend, the
reader is referred to the web version of this article.)
180
160
140
Subjects120
100
80
180
Original Landmarks Landmarks + Noise ( = 1) Landmarks + Noise (
= 2) Landmarks + Noise ( = 3) Landmarks + Noise ( = 4) Landmarks +
Noise ( = 5)160
140
Subjects120
100
80
120
Original LandmarksLandmarks + Noise ( = 1) Landmarks + Noise ( =
2) Landmarks + Noise ( = 3) Landmarks + Noise ( = 4) Landmarks +
Noise ( = 5)100
Subjects80
60
Original Landmarks Landmarks + Noise ( = 1) Landmarks + Noise (
= 2) Landmarks + Noise ( = 3) Landmarks + Noise ( = 4) Landmarks +
Noise ( = 5)
606040
4040202020
00 1.25 2.5 3.75 5 6.25 7.5 8.75 > 10
00 0.75 1.5 2.25 3 3.75 4.5 5.25 > 6
00 0.75 1.5 2.25 3 3.75 4.5 5.25 > 6
Squared error
x 10-7
Squared error
x 104
Squared error
x 105
Fig. 6. Histograms showing the distribution of (a) minimum, (b)
mean and (c) maximum squared error values computed from the
comparison of images aligned using the original location of facial
landmarks provided by the database, and locations corrupted by
Gaussian noise with mean 0 and standard deviation (r) ranging from
1 to 5.
Proposed ApproachWe calculated the average of each metric for
the k folds and the results are presented in Fig. 7, respectively
for PGA and SWPGA. As expected, the nearest-neighbor interpolation
had the poorest accuracy (0:7 for PGA and 0:677 for SWPGA), while
the linear and natural-neighbor interpolation are considered tied
(0:711 for PGA and 0:683 for SWPGA, both). The TPS had the highest
accuracy (0:717 for PGA and 0:706 for SWPGA), suggesting that
smoother interpolation can increase the gender classication
performance. It is important to emphasize that we have used the
full set of PGA features during the classication step of the PGA
technique, but only the d 5 leading PGA features during the
training step of the SWPGA technique. In that case, one must be
careful while reading the graphs in Fig. 7 in order to compare the
performance of PGA and SWPGA. Notice that it would not be a fair
comparison. As pointed out in Wu et al. (2011), SWPGA outperforms
PGA when the same number of PGA features are used during the
training and
the classication steps. The results in Fig. 7 should only be
ana- lyzed to evaluate the performance of interpolation
procedures.By comparing the results of changing the interpolation
tech- nique used in both PGA and SWPGA methods (Fig. 7), it is
impor- tant to notice that the accuracy differences in the PGA
model are smaller than those found in the SWPGA model. The TPS in
the SWPGA showed an increased accuracy of up to 3%. We believe
that, since the SWPGA iteratively creates a weight map to describe
relevant discriminating regions, iterative methods have the ten-
dency to amplify the errors introduced by the simpler interpolating
functions and, as a consequence, the TPS resulted in higher accu-
racy when applied to the gender discriminating model.The purpose of
the weight map computed by the SWPGA is to improve the gender
discriminating capacity of the leading features extracted from a
training set (Wu et al., 2011). The leading features are estimated
from pixel-by-pixel coherence between subjects of
Fig. 7. The results of (a) PGA and (b) SWPGA. Notice how the TPS
provides a higher accuracy value than the nearest-neighbor, linear
and natural-neighbor interpolations.
the same gender and pixel-by-pixel incoherence between genders.
We believe that the lack of continuity (artifacts) introduced by
the nearest-neighbor and the linear interpolation schemes affects
the computation of proper weights because the artifacts may mask
small non-soft features expected in male faces. By comparing the
TMF and TFR coefcients computed for simpler interpolation schemes
and for the proposed approach, it is possible to conclude that male
classication benets from the use of the TPS-based scheme. Notice in
Fig. 7b that the TMR increased from 0:685 (near- est) to 0:720
(TPS), while the TFM increased from 0:681 (nearest) to 0:709 (TPS).
Such an improvement may be explained by TPS ability to estimate the
depth value of a point on the surface from all data points in the
same block, and not just from the closest data points as in nearest
or linear interpolation, leading to a continuous and coherent
surface.Similarly to the aforementioned metrics, the computed MCCs
show that the nearest-neighbor, linear, and natural-neighbor inter-
polations are equivalent to each other when applied with both
non-iterative and iterative classication approaches. The TPS, on
the other hand, may improve the result of iterative techniques. The
MCC coefcients computed for the interpolation schemes used in
combination with the PGA were 0:402 (nearest), 0:424 (linear and
natural), and 0:435 (TPS). In contrast, the coefcients com- puted
for simpler interpolation schemes with SWPGA were 0:361 (nearest),
and 0:375 (linear and natural), while the MCC coefcient for TPS
with SWPGA was 0:419. In practice, this means that for
non-iterative techniques the simpler interpolation methods, spe-
cially the linear and natural-neighbor interpolations, can be ap-
plied with no major impact on the nal classication result. However,
it is recommended to use our TPS-based approach in techniques that
may amplify interpolation errors (e.g., iterative methods).
5. Conclusions
We have presented a completely automatic approach for align- ing
and reconstructing damaged facial depth images. The approach uses
TPS to smoothly interpolate existing data, facial landmarks to
ensure data alignment, and RM-based ray casting to render the nal
aligned depth image having arbitrary resolution. In order to reduce
the high computational costs of the TPS, a block division ap-
proach was introduced where separate TPSs are adjusted to each
block, considerably reducing the time needed to t an interpola-
tion. We demonstrated the effectiveness of the proposed tech-
niques by implementing it and using it to align faces of several
real depth images available in a well-known biometric database.
The proposed alignment and interpolation methods were com- pared
against two common approaches: one based on 2D align- ment and
linear interpolation that operates on intensity images, and another
one based on 3D alignment using ICP and linear inter- polation for
depth data sampling. The errors in the proposed meth- od were up to
two orders of magnitude smaller than the common approach. This
result suggests that it is recommended the use of the proposed
techniques in order to achieve better results on pro- cedures that
are currently based on naive alignment and recon- struction of
depth data.When using the proposed alignment method (in the 3D do-
main) while varying only the interpolation scheme it has been shown
that the differences in the nal results were better in favor of the
proposed technique. More specically, the experiments sug- gest that
the TPS has better results when used within iterative methods since
the feedback mechanisms of this kind of procedure tend to amplify
errors (e.g., interpolation errors). Also, the TPS has proven able
to increase the gender classication accuracy of the SWPGA model by
3%. With that in mind, the presented conclusion is that when the
research is in a prototyping phase the researcher may use a simple
interpolation method (i.e., linear) in order to val- idate their
implementation and later use a more sophisticated interpolation
method (i.e., our approach) to improve the nal results.We believe
that these ideas may lend to better results on proce- dures that
are currently based on naive alignment of depth data. We are
currently exploring ways of analyzing the error propaga- tion
through the stages of our algorithm. A reference implementa- tion
of the approach described here will be made available to other
research groups in the home page of the authors.
Acknowledgments
This work was sponsored by FAPERJ (E-26/111.468/2011). Giancarlo
was sponsored by a CAPES fellowship. We thank the Computer Vision
Research Laboratory of the University of Notre Dame for the
database used in this research. We thank Wu, Smith and Hancock for
kindly providing the implementation of their gen- der classication
technique, and the anonymous reviewers for their comments and
insightful suggestions.
References
Azouz, Z.B., Rioux, M., Shu, C., Lepage, R., 2004. Analysis of
human shape variation using volumetric techniques, In: Proc. of
CASA, pp. 197206.
90G. Taveira, L.A.F. Fernandes / Pattern Recognition Letters 50
(2014) 8290
Besl, P.J., McKay, N.D., 1992. Method for registration of 3-D
shapes, In: Proc. of IEEE Trans. Pattern Anal. Machine Intell.,
International Society for Optics and Photonics. pp.
239256.Bookstein, F.L., 1989. Principal warps: thin-plate splines
and the decomposition of deformations. IEEE Trans. Pattern Anal.
Mach. Intell. 11, 567585.Chang, K., Bowyer, K., Flynn, P., 2003.
Face recognition using 2D and 3D facial data, In: ACM Workshop on
Multimodal User Authentication, pp. 2532.Guo, H., Jiang, J., Zhang,
L., 2004. Building a 3D morphable face model by using thin plate
splines for face reconstruction, In: Proc. of SINOBIOMETRICS, pp.
258267. Hartley, R.I., Zisserman, A., 2000. Multiple View Geometry
in Computer Vision.Cambridge University Press.Kakadiaris, I.A.,
Passalis, G., Toderici, G., Murtuza, M.N., Lu, Y., Karampatziakis,
N., Theoharis, T., 2007. Three-dimensional face recognition in the
presence of facial expressions: an annotated deformable model
approach. Pattern Analysis and Machine Intelligence 29,
640649.Kohavi, R., 1995. A study of cross-validation and bootstrap
for accuracy estimation and model selection, In: Proc. of IJCAI,
pp. 11371143.Kohavi, R., Provost, F., 1998. Glossary of terms.
Mach. Learn. 30, 271274.Matthews, B., 1975. Comparison of the
predicted and observed secondary structure of t4 phage lysozyme.
Biochim. Biophys. Acta 405, 442.Moreno, A.B., Sanchez, A., Velez,
J.F., Diaz, F.J., 2005. Face recognition using 3D local geometrical
features: PCA vs. SVM, In: Proc. of ISPA, pp. 185190.Perakis, P.,
Theoharis, T., Passalis, G., Kakadiaris, I.A., 2009. Automatic 3D
facial region retrieval from multi-pose facial datasets, In: Proc.
of Eurographics Workshop on 3D Object Retrieval, pp.
3744.Policarpo, F., Oliveira, M.M., Comba, J., 2005. Real-time
relief mapping on arbitrary polygonal surfaces, In: Proc. of ACM
SIGGRAPH I3D, pp. 155162.
Romero-Huertas, M., Pears, N., 2008. 3D facial landmark
localisation by matching simple descriptors, In: Proc. of IEEE
Intern. Conf. on BTAS, pp. 16.Rosen, A., 1996. AlexWarp applet.
Segundo, M.P., Gomes, L., Bellon, O.R.P., Silva, L., 2012.
Automating 3D reconstruction pipeline by SURF-based alignment, In:
Proc. of IEEE ICIP, pp. 17611764.Stormer, A., Rigoll, G., 2008. A
multi-step alignment scheme for face recognition in range images,
In: Proc. of IEEE ICIP, pp. 27482751.Szeliski, R., 2010. Computer
Vision: Algorithms and Applications. Springer. Tekumalla, L.S.,
Cohen, E., 2004. A hole-lling algorithm for triangular meshes.Wang,
J., Oliveira, M.M., 2003. A hole-lling strategy for reconstruction
of smooth surfaces in range images. In: Proc. of SIBGRAPI. IEEE,
pp. 1118.Whitbeck, M., Guo, H., 2006. Multiple landmark warping
using thin-plate splines, In: Proc. of IPCV, pp. 256263.Wu, J.,
Smith, W., Hancock, E., 2011. Gender discriminating models from
facial surface normals. Pattern Recognit. 44, 28712886.Wu, J.,
Smith, W.A.P., Hancock, E.R., 2010. Facial gender classication
using shape- from-shading. Image Vis. Comput. 28, 10391048.Xu, C.,
Li, S., Tan, T., Quan, L., 2009. Automatic 3D face recognition from
depth and intensity gabor features. Pattern Recognit. 42,
18951905.Yan, P., Bowyer, K.W., 2005. Ear biometrics using 2d and
3d images. In: Proc. of CVPR Workshops. IEEE, p. 121.Zhu, J., Wang,
L., Yang, R., Davis, J., 2008. Fusion of time-of-ight depth and
stereo for high accuracy depth maps, In: Proc. of CVPR, pp. 18.