Embed Size (px)
Citation preview

Automatic Algorithm for Correcting Motion Artifacts inTime-Resolved Two-Dimensional Magnetic ResoanceAngiography Using Convex Projections
Ashish Raj,1,2 Honglei Zhang,1 Martin R. Prince,1 Yi Wang,1,3* and Ramin Zabih1,4
Time-resolved contrast enhanced magnetic resonance angiog-raphy (MRA) may suffer from involuntary patient motion. It isnoted that while MR signal change associated with motion islarge in magnitude and has smooth phase variation in k-phase,signal change associated with vascular enhancement is smallin magnitude and has rapid phase variation in k-space. Basedupon this observation, a novel projection onto convex sets(POCS) algorithm is developed as an automatic iterativemethod to remove motion artifacts. The presented POCS algo-rithm consists of high-pass phase filtering and convex projec-tions in both k-space and image space. Without input of de-tailed motion knowledge, motion effects are filtered out, whilevasculature information is preserved. The proposed methodcan be effective for a large class of nonrigid motions, includingthrough-plane motion. The algorithm is stable and convergesquickly, usually within five iterations. A double-blind evaluationon a set of clinical MRA cases shows that a completely unsu-pervised version of the algorithm produces significantly betterrank scores (P � 0.038) when compared to angiograms pro-duced manually by an experienced radiologist. Magn ResonMed 55:649–658, 2006. © 2006 Wiley-Liss, Inc.
Key words: convex projections; POCS; motion correction; mag-netic resonance angiography; non-global motion
Time-resolved contrast-enhanced magnetic resonance an-giography (MRA) provides temporal flow and anatomicinformation about vascular conduits (1). In projection 2DMR digital subtraction angiography (MRDSA) (2,3), com-plex subtraction of precontrast from postcontrast datayields the arteriogram. Clinical evidence (4) indicates that2D MRDSA is as suitable for infrapopliteal imaging asconventional X-ray angiography. Patient motion can causespurious changes in contrast-induced dynamic signal,contaminating the integrity of dynamic data relating tovascular evolution. Motion of elongated structures (e.g.,bones) can create subtraction artifacts resembling arteries.The radiologist may be forced to discard motion-corruptedframes, causing gaps in the temporal MRA record and
possibly misdiagnosis (5). Techniques that can rescuethese motion-corrupted frames would be very valuable.
A range of motion correction methods have been devel-oped; most of them utilize specific motion modeling. Cor-rection of rigid global motion in single-frame MR imageswas reported using subspace analysis (6,7) and navigator-based correction (8–10). Motion in MRA may be nonglobal(affecting some but not all portions of image space) as wellas inter-view motion (i.e., affecting some lines of k-spacebut not others). Global, rigid inter-view motion was ad-dressed in a model-free manner using projection or en-tropy maximization (11–15), but these works did not ad-dress nonrigid motion typically encountered in MRA.Multisensor techniques for PET images (16) and cardiacgating using EEG (17,18) may be applied to MRA, butrequire additional instrumentation with questionable ef-fectiveness. Retrospective techniques (18) relying on cor-relation-based template matching of moving regions areinapplicable for inter-view motion, since motion occursnot only between frames but also within them. No existingworks, to our knowledge, have addressed the case of inter-view motion that is nonglobal in image space. Currentlyfor 2D MRDSA, frames corrupted by motion are identifiedand discarded manually (5).
We present here an automated iterative projection onto aconvex set (POCS) algorithm that filters out motion arti-facts in time series 2D MRDSA. The class of POCS algo-rithms has been used widely for band-limited extrapola-tion (19), image restoration (20), noncoherent phase cor-rection in optics, and partial Fourier MR techniques(21,22). The success of POCS in diverse applications stemsfrom its conceptually simple but powerful way to exploit apriori constraints. Rather than attempt to track highly com-plex 3D motion parameters from 2D data, we exploit thedynamic information content of the MRDSA data set toretrospectively mitigate motion, however it may arise.This nonparametric approach treats motion simply assources of k-space discrepancy; hence, it is robust againstin- and through-plane inter-view motion, both global andnonglobal. We take special care to ensure that vascularenhancement is not unduly affected in the process. Wealso prove convergence and stability of the algorithm.
THEORY
The proposed method relies on the following observationssummarized from our extensive experience with time re-solved contrast enhanced MRDSA:
1. Within the temporal MRA frames a majority of framesare “good,” i.e., motion-free.
2. Motion-free frames are nearly identical to each otherexcept in vascular regions.
1Department of Radiology, Weill Medical College of Cornell University, NewYork, New York, USA.2Department of Electrical Engineering, Cornell University, Ithaca, New York,USA.3Department of Biomedical Engineering, Cornell University, Ithaca, New York,USA.4Department of Computer Science, Cornell University, Ithaca, New York,USA.*Correspondence to: Yi Wang, 575 Lexington Avenue, 3rd floor, New York,NY 10022, USA. E-mail: [email protected] 22 August 2005; revised 17 October 2005; accepted 10 November2005DOI 10.1002/mrm.20806Published online 6 February 2006 in Wiley InterScience (www.interscience.wiley.com).
Magnetic Resonance in Medicine 55:649–658 (2006)
© 2006 Wiley-Liss, Inc. 649

3. Contrast-induced vascular enhancement yields smallchanges in MR signal, with the change widespread ink-space. But motion usually causes much larger variationsin detected signal.
4. Phase changes due to translational motion are eitherlinear or smoothly varying in k-space, whereas those dueto vascular enhancement are sharply rapidly varying ink-space.
5. Out-of-plane components of 3D translations do notdegrade 2D projection MRA data.
We now develop projections P1 to P4 that exploit obser-vations 2–5 to remove motion artifacts from the corruptedframe by enforcing similarity to the good frames (observa-tion 1) without degrading the vasculature. Each projectionforces the corrupted frame to belong to a certain convexconstraint set, convexity being required in POCS theory forguaranteed convergence (23,24). See Appendix A for def-inition and proof. The POCS algorithm is applied to thecorrupted frame using a reference obtained from the goodframes. For every corrupted frame c in the MRA sequence,let the starting image be I0 � Ic(x,y). At nth iteration, theprojections are
Fn�0� � FFT�In�1�
Fn�1� � �1 � �1�Fn
�0� � �1P1Fn�0�
Fn�2� � �1 � �2�Fn
�1� � �2P2Fn�1�
In�0� � IFFT�Fn
�2��In
�1� � �1 � �3�In�0� � �3P3In
�0�
In�2� � �1 � �4�In
�1� � �4P4In�1�
In � In�2�
� [1]
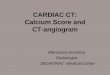
where 0 � i � 1, i � 1,. . . 4, are relaxation factors used toweight the projections. This process is repeated manytimes. P1 and P2 are applied view by view in k-space,whereas P3 and P4 are applied on the full image. Thesehighly independent constraint sets defined by P1–P4, ap-plied alternately in two orthogonal spaces (k-space andimage space), form a powerful combination against motionartifacts. Figure 1 summarizes the algorithm.
P1: k-Space Box Constraint Step
Observation 3 is used to design P1, which filters out largemotion artifacts in k-space without using a specific para-
metric motion model. Letting F(kx,ky) be the k-space im-age, we apply the projection
P1�F�
� � F |F � Fref| � ε|Fref|;
Fref � �F � Fref�ε
|F � Fref|, |F � Fref| � ε|Fref|
,
[2]
where Fref is reference k-space data. Projection P1 (k-re-strict) is a nonlinear k-space filter that restricts corruptedk-values to lie within a spherical “box” of reference k-values (see Fig. 2). The box radius around Fref is �Fref �,0 � � 1. Box constraints of this kind are well known tobe convex (13). Note that the efficacy of P1 is unaltered bywhether motion is in-plane or through-plane.
Since P1 keeps large temporal changes from occurring,its application in general will lead to loss and obliterationof temporal events along with motion artifacts. However,observation 3 indicates that the vasculature is sparse andlocalized in image space, so its contribution to each k-space point is likely to be very small and widely spread.We empirically verify this observation in the next sectionand demonstrate that for a sensible choice of sufficientlylarger than the mean energy per data point of the vascula-ture, P1 will not adversely affect temporal evolution of thevasculature.
P2: Phase Correction Step
Projection P2, denoted by the box phase-correct, is a phasefilter for correcting in-plane translational motion artifacts.It relies on observation 4, that phase artifacts due to trans-lation vary smoothly in k-space (i.e., are band-limited tolow spectral components), whereas the phase due to vas-cular evolution on subtracted images has much sharperk-space variation. We show this in Results by plotting thespectral distribution of phase difference (Fig. 6). Clearly,high-pass filtering this phase difference effectively sup-
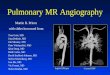
FIG. 2. The k-space box constraint imposed by P1 moves anarbitrary point F(k) in the corrupted frame to the nearest point,denoted by P1F(k), on the circle centered at the correspondingk-value in the reference image, Fref(k). This forces corrupted k-spaceto be similar to reference k-space. The parameter determines thedegree of enforced similarity.
FIG. 1. The POCS algorithm. Each box represents a convex pro-jection P1–P4. P1 or “k-restrict” and P2 or “phase-correct” operate ink-space, one view at a time. P3 (parenchyma-correct) and P4 (back-ground-correct) operate in image space, on the entire image. FFTand IFFT operators perform Fourier transform and its inverse, re-spectively. The POCS algorithm is repeated till a convergence cri-terion is met.
650 Raj et al.

presses translation phase. We selected a high-pass filterhaving a five-point impulse response kernel in k-spacegiven by h � [�0.2, �0.6, 1, �0.6, �0.2] and the spectralresponse shown in Fig. 3. This filter acts on the phasedifference between the current and reference echo. Let thecurrent frame be F�kx,ky� � | F�kx,ky�| � exp�i�kx,ky��.Dropping coordinates, P2 is given by
� � � ref, P2F � |F| � exp{i(ref � h*�)}, [3]
where * denotes convolution. h may be a 1D filter that actsonly in the read out (kx) direction. It is usually assumed
that a single ky line is acquired quick enough that motioneffects occur between ky lines, not within them (13). Fil-tering only along kx prevents corrupted PE lines frominfluencing the phase of other ky lines. In general, P2 canbe applied on both phase encoding and frequency encod-ing directions to filter out constant, linear, and othersmoothly varying phase in k-space. This P2 filter can beeffective against nonglobal translation (observation 4) (seeempirical verification in Fig. 6 and theoretical analysis inAppendix B). Detailed spectral analysis was earlier re-ported in Ref. (25).
Convexity is vital for convergence and stability; unfor-tunately, proving it is difficult due to nonlinearity of P2. InAppendix A we provide a proof based on approximations.Now 2D projection MRA is the orthographic projection of3D data after spatial averaging along the normal. Thus, anytranslation normal to this plane does not affect the scan,provided the A–P projection slab is thicker than therange of through-plane translations, thus confirming ob-servation 5.
P3 and P4: Intensity Correction Steps
Projection P3, parenchyma-correct, imposes image inten-sity constraints given by observation 2 by forcing the pa-renchyma (flesh) regions of the image to be “close” to thecorresponding regions of the reference. Let � be the set ofall pixels belonging to regions deduced to be parenchyma.Then for every pixel p in the corrupted image and thecorresponding pixel pref in the reference image
P3�p� � �I�p�,I�p�,
I�pref� � �I�p� � I�pref�
|I�p� � I�pref�|,
p �/ �;p � �, |I�p� � I�pref�| � �|I�pref�|;p � �, |I�p� � I�pref�| � �|I�pref�|. [4]
This constraint set is well known to be convex. For se-quences without excessive motion a reference angiogramis usually available to drive reasonable estimates of paren-chyma regions. The background is the MR region with nosignal and is non zero merely due to noise and motion.Projection P4, BkGnd in Fig. 1, forces it to be zero. Thisclearly defines a convex set, since a linear combination oftwo images of zero background is also an image of zerobackground.
MATERIALS AND METHODS
To validate the POCS method we performed several imag-ing experiments using a time-resolved 2D MRDSA se-quence. Both simulation and clinical MRA data were used.These experiments are categorized into three groups: 2DMRA signal characterization experiments, motion simula-tions, and in vivo clinical studies.
Signal Characterization of Peripheral 2D MRA Data
In order to validate the observations presented under The-ory, clinical peripheral 2D MRA data of the tibial trifurca-
tion were studied. We examined the magnitude and phaseof signals arising from the vasculature as well as frommotion-induced artifacts. An uncorrupted exam was usedto validate observation 3. The angiogram was obtainedmanually, and this served as a model for vasculature sig-nal. k-space magnitude of this, as well as overall magni-tude data, was plotted on the same axis, by averaging fourradial k-space lines. A motion-corrupted angiogram dis-playing nonglobal translation in image space was similarlyprocessed for comparison. To validate observation 4, spec-tra of phase difference due to vascular enhancement be-tween adjacent frames were obtained using Burg’s averageperiodogram (26) from several rows of vasculature phasein k-space. The spectrum of translation-induced phase wasobtained; details are given in Appendix B. Relevant plotsare presented in the Results.
Validation on Simulated Motion
Motion-free clinical MRA data were used to artificiallyintroduce various kinds of motion. POCS was applied tothese data sets. We varied � from 0 to 1 in 0.1 increments,
FIG. 3. Spectral response of high-pass phase filter h. The spectralindex has dimension of space.
POCS Motion Correction in 2D MRA 651

from 0 to 0.5 in 0.05 increments, and � from 0.5 to 1 in0.05 increments for a number of cases and selected theparameters yielding the best overall results by visual in-spection. These parameters are: �1 � �2 � �3 � �4 � 0.8, � 0.25, � � 0.75. Unless otherwise noted, all resultsherein and henceforth used these parameters, with threeiterations of POCS.
We studied three kinds of motion: step translation, ran-dom walk translation, and combined translation and rota-tion; all with nonglobal inter-view motion. In order tointroduce nonglobal motion, the original raw data are Fou-rier transformed into image space. The first simulationintroduces a translation in the top half of the image by twopixels in both x- and y-directions, and then the image istransformed back to k-space. To simulate step-type inter-view motion, we replaced the top 40% of the views bythose of the original data. Next we apply a continuousrandom-walk translation in the same manner, which isplotted against PE index in Fig. 4a. The step size at eachpoint was sampled from a zero mean Gaussian to modelerratic or involuntary motion. Finally, 15o rotation of thetop half of the image corresponding to the left leg wasintroduced before the translation simulated in the firstexperiment. The k-space data now consist of the top partunaffected by motion, the middle part affected by transla-tion and rotation, and the bottom part affected by transla-tion only. The resulting effects on k-space data are de-picted in Fig. 4b.
Validation on Clinical MRDSA Data
Real clinical peripheral MRA exams of the trifurcationwere done on 47 consecutive patients (26 males 24–87years old and 19 females 33–85 years old). Primary indi-cations in these patients included claudication (n � 23),limb-threatening ischemia (n � 11), aneurysm (n � 7),postbypass graft (n � 3), and dissection (n � 1). The studywas approved by our institutional review board. The 2Dprojection MRA data were obtained at 1.5 T using a headcoil (LX Horizon, GE Medical Systems). Patients wereplaced feet-first with legs positioned within the head coilto image from above the patella down to mid-calf. The 2Dprojection MRA was performed as a coronal spoiled gra-dient echo sequence using the following parameters: TR/TE/ flip angle � 10/2/60°, slab thickness � 7–10 cm, fieldof view � 30 cm, matrix � 256 192, bandwidth �16 kHz. Imaging time was 1.95 s per acquisition repeated35 times. Gadolinium contrast (5–7 mL at 0.5mol/liter)(Magnevist, Berlex Labs, Wayne, NJ, USA) was injected
concurrent with image acquisition and flushed with 20 mLsaline. The injection rate was 2.5 mL/s by hand with aSmartSet (TopSpins, Ann Arbor, MI, USA) or using anautomatic injector (Spectris MR Injector, MedRad, Pitts-burgh, PA, USA). Five to ten precontrast frames wereobtained.
MRA data were processed in two ways: manual (5) andautomatic. First, MRA frame sequences were visually eval-uated by an experienced radiologist (HZ), and estimates ofcontrast arrival, arterial, mask and venous phase weremanually obtained. After discarding motion-corruptedframes, the final angiogram was obtained by subtractingmask frames from arterial frames. Next, for automatic mo-tion correction, mask and arterial phases were identifiedusing Ref. (27), a new, automatic MRDSA method. Weincorporated the proposed POCS algorithm within thisautomated MRDSA algorithm. Our implementation ranthree iterations of POCS on all frames identified by theautomatic MRDSA software as having motion, with � �0.8, � 0.25, � � 0.75. The reference was obtained, aftersome experimentation, by median operation on the pre-ceding three frames.
To assess the difference between manual motion andautomatic correction, a double-blinded study was per-formed on 47 cases. Randomized image pairs from bothmanual and automatic corrections were presented to an-other experienced radiologist (MRP). The images wereranked from 2 to �2, with 2 denoting one method perform-ing substantially better than the other, 1 (marginally bet-ter), 0 (same), �1 (marginally worse), and �2 (substan-tially worse). A one-sided paired signed-rank Wilcoxontest was performed on this data to assess the statisticaldifference between manual and automatic motion correc-tion.
RESULTS
Signal Characterization of Peripheral 2D MRA Data
Figure 5a and b shows an uncorrupted and a corruptedangiogram respectively. The k-space magnitude of bothreference and difference (vascular) signal of Fig. 5a isplotted in Fig. 5c. Observe that apart from one or twocentral pixels containing the lowest frequencies, the vas-cular curve maintains nearly constant low energy. In con-trast, the reference data follow a more pronounced declinein magnitude. In Fig. 5d we plot the ratio of uncorruptedvasculature to reference magnitude, averaged over severalradial lines of several angiograms. The highest point of the
FIG. 4. (a) Nonglobal random-walk translation,plotted as a function of ky, the phase encode index(in units of 1/FOV). It is assumed that motion is onlybetween different PE lines, not within them. Thetop curve shows translation along PE; bottomcurve along FE. (b) Combined nonglobal rotationand translation mapped in k-space.
652 Raj et al.

curve is lower than 0.25; hence, � 0.25 will ensureagainst vascular degradation. Figure 5e shows the ratiocurve of the corrupted case in Fig. 5b. The corrupted ratiois much higher, an average of 20 times, than pure vascularratio. This was generally observed in the other cases weinvestigated, thus confirming observation 3. Figure 6ashows a spectrum of phase (after unwrapping) caused bynonglobal in-plane translation, and Fig. 6b shows the spec-trum of the phase caused by the vasculature.
Results of Simulated Motion
The POCS algorithm is quite effective in removing arti-facts from the three types of simulated motion, as shown
in Fig. 7. Step translation on uncorrupted frame (Fig. 7a)results in a corrupted angiogram (Fig. 7c) after framesubtraction, which is diagnostically useless compared tothe uncorrupted angiogram (Fig. 7b). Even though onlythe top half of the image undergoes translation, due tointer-view motion the effect is uniformly bad for theentire image. Figure 7d shows the POCS-corrected re-sult. Angiogram corrupted by random-walk translationis shown in Fig. 7e and POCS corrected angiogram inFig. 7f. Images for the combined rotation/translationexample are in Figs. 7g and h. Due to partial k-spaceeffect, the artifacts in Fig. 7g are more disturbing thanmere rotational misalignment, with the latter being vis-
FIG. 5. Signal properties of a typical pe-ripheral 2D MRA case. (a) Uncorrupted dif-ference image; (b) Difference image cor-rupted with nonglobal translation and rota-tion; (c) Plot of k-space magnitudes versusradius for (a) (solid line: unsubtracted refer-ence magnitude, dashed line: vascular sig-nal); (d) ratio of vascular to reference mag-nitude for the uncorrupted case (a); (e) ratioof vascular to reference magnitude for thecorrupted case (b). The corrupted ratio is onaverage 20 times higher than the uncor-rupted ratio.
FIG. 6. Typical power spectra of k-space signalphases, obtained from the phase difference be-tween consecutive frames: (a) phase due to non-global translation in image space; (b) phase due tovascular enhancement, obtained from an artifact-free sequence. Spectra concentrated near low(high) spectral index correspond to slow (fast)phase variation across k-space. Note that althoughspectral index has spatial dimensions, a simpleinterpretation in terms of image-space propertiesis not available since the former indexes onlyphase data rather than the entire complex data.
POCS Motion Correction in 2D MRA 653

ible in the top half, aligned at roughly 15o. POCS re-moves most artifacts in all three cases.
Results of Automatic versus Manual Motion Correction onClinical MRDSA Data
Result of the double-blinded comparison is summarized inTable 1. Improvement in visual quality as well as SNR wasobserved in most cases exhibiting motion artifacts. Tworepresentative examples are illustrated in Figs. 8 and 9.Figure 8 shows substantial motion artifacts, whereas Fig. 9shows little motion. The results on a typical consecutive
difference image from this data set are shown in Figs. 8aand b. As a consequence of such improvements in indi-vidual frames, POCS yielded a markedly cleaner automatic
FIG. 7. Examples of various types of nonglobalinter-view motion: (a) Uncorrupted frame, (b) un-corrupted (single difference) angiogram, (c) cor-rupted by step translation, (d) POCS result, (e)corrupted by random-walk translation, (f) POCSresult, (g) combined translation � rotation, (h)POCS result. POCS effectively removed most mo-tion artifacts from these complicated examples ofnonglobal motion.
TABLE 1Double-Blind Comparison Results
Rank score 2 1 0 �1 �2 Mean
No. of cases 3 22 6 16 0 0.26 (P � 0.04)
Note. Scores: 2(POCS substantially better than manual), 1(margin-ally better), 0 (same), �1(marginally worse), �2(substantially worse).
654 Raj et al.

summary angiogram (Fig. 8d) than the manual angiogram(Fig. 8c). The case of Fig. 9 shows the left leg having anoccluded posterior tibial artery. There are few artifacts tobegin with; POCS yielded slightly better subjective quality(from the double-blinded evaluation) on account of minorimprovements in background noise. The one-sided pairedsigned-rank Wilcoxon test on these data indicates statisti-cally significant improvement of POCS over manual (P �0.04).
DISCUSSION
We have presented a POCS algorithm that can filter outmotion artifacts from 2D time-resolved contrast-enhancedMRA. This POCS algorithm is based on the observationsthat large magnitude changes and smooth phase variationsin detected k-space signal are associated with motion,while small magnitude changes and rapid phase variationsin k-space signal are associated with contrast enhance-ment. Simulated motion experiments indicate that thePOCS algorithm provides clear removal of arbitrary arti-facts from a variety of motion sources. Evaluation on clin-ical MRDSA data suggests that the automatic POCS pro-vides significant artifact reduction.
Although overall the POCS algorithm significantly out-performed an experienced radiologist in the clinical eval-uation, quality improvement in the summary angiogramwas not observed in all cases (Table 1). In cases where theautomatic POCS did slightly worse than manual, there
were not many motion artifacts to begin with. Since it isnecessary to constrain the time evolution of vascular fea-tures to remove arbitrary motion, there may be a slight lossof fine details in vascular definition in the process ofrepeat applications of the POCS algorithm on the samedata set. This is a problem only for incessant, pervasivemotion, a relatively infrequent occurrence. In the clinicaldata set investigated in this study, our POCS algorithmcaused little vascular degradation.
Phase unwrapping must be performed prior to high-passfiltering. While unwrapping is a difficult problem in gen-eral (28,29), a simple method was found to be sufficient bysmoothing out simple �-jumps along the kx direction in acenter-edge order. Experimentation with more sophisti-cated unwrapping methods did not result in discernibleperformance gains, probably because the phase differenceis along the kx only. This is a 1D unwrapping problem thatdoes not require complicated phase unwrapping algo-rithms.
The parameters in the presented POCS algorithm werechosen empirically from the following range of variations:�i � [0.5, 1.0] (i � 1,2,3,4), � [0.2, 0.5], and � � [0.5,1.0].For the studied clinical cases, the algorithm performancein terms of convergence and artifacts removal was fairlyinsensitive to the variation in �i and �. For cases withpervasive (rather than isolated) motion, the output imagequality varied slightly with the box radius . We also notedthat the POCS algorithm performance was also insensitiveto the bandwidth of the high-pass filter h. Indeed, a major
FIG. 8. Motion correction of clinical periph-eral MRA case. (a) Motion corrupted differ-ence image from two consecutive framesand (b) difference image after POCS correc-tion. After this process was repeated forevery corrupted frame, a summary angio-gram was created automatically using theautomatic MRDSA program. (c) shows themanually obtained summary angiogram,and (d) shows the automatic summary an-giogram after motion correction, demon-strating marked improvement in vasculardelineation over (c).
FIG. 9. Clinical peripheral MRA example where lit-tle difference is seen between manual (a) and au-tomatic (b) motion methods. There were little mo-tion artifacts in this case.
POCS Motion Correction in 2D MRA 655

goal of our work is to keep things nonparametric as far aspossible.
Since P1–P4 are linear pointwise filtering operations, thealgorithm is quite fast, taking approximately 3 s/frame in aMATLAB implementation on a PC with a 2 GHz PentiumIII processor. We expect an efficient C execution to reducethis by more than an order of magnitude.
We have shown mathematically in Appendix B thatglobal as well as nonglobal translations can be handled byprojection P2. This discussion can be extended to rotation,which can be removed by the combination of P2 and P1. P1
filters out large rotations both in-plane and through-plane;the residual in-plane rotations are small and can be ap-proximated by
x� � x � �x���x,
where x is a 2D vector representing spatial location, therotational angle is �, and the direction of rotation at x isgiven by the unit vector �x. Since this is nothing but apiecewise nonglobal translation, it can subsequently beremoved by P2.
The assumption that an uncorrupted reference imagecan be obtained from the median operation may fail ifthere is excessive motion in all or a majority of frames inthe precontrast reference set. Such situations appear to berare. The median operation on the reference set ignoresisolated instances of motion in the reference set. The num-ber of frames for reference is selected to average out thenoise but avoid motion contamination. We found thatthree reference frames worked well in our clinical evalu-ation.
The fully automatic motion filtering presented here usedinput of contrast arrival frame number to classify precon-trast frames for reference. The automated estimate of con-trast arrival may be unreliable in the presence of motion(27). The POCS algorithm can be applied in nonautomaticmode, where an operator selects arterial, mask, and mo-tion-corrupted frames.
The retrospective POCS algorithm can be used synergis-tically with the navigator gating method such as to mini-mize residual motion artifacts within the gating window(30). This nonparametric POCS method may be more ad-vantageous than existing parametric motion correctionmethods (10) in cases when object motion cannot be com-pletely determined. The POCS algorithm may also be ap-plied to reduce motion artifacts in other dynamic studiessuch as fMRI and perfusion. Generalization to 3D data andcomplex 3D motion should be quite straightforward sincewe do not rely on specific motion models. These general-izations of the POCS approach will require modification ofthe projection operators.
In conclusion, vascular enhancement and motion arti-facts affect k-space signal magnitude and phase in a dis-tinct manner. Accordingly, a POCS algorithm can be con-structed that imposes consistency constraints in dynamicMRA data to filter motion artifacts but preserve vascularenhancement. Clinical data demonstrated the feasibility ofusing the model-free POCS algorithm to suppress arbitrarymotion artifacts.
APPENDIX A: CONVEX CONSTRAINTSETS—DEFINITION AND PROOF
For a frame of N M voxels, imagine an NM-variablesolution space, each of whose points represents a possibleimage. In POCS theory projections are defined by con-straints, which force possible solutions to belong to someconvex constraint set in this solution space. A set C isconvex iff for any two members a, b � C a binary mixturec � � a � (1 � �) b, 0 � � � 1, also belongs to C. Provingconvexity of P2 is complicated since it is a phase operatorand not guaranteed to define a convex projection in CM N,the space of M N complex images. Theorem 1 provesthat it does in fact approximate, to arbitrary accuracy, aconvex projection by virtue of algorithm construction.Theorem 1.
Let H((kx, ky)) be the high pass filter (P2) applied onphase (kx, ky). Let L be the complementary low-pass filterconstructed such that LH � 0 and C the set of M Ncomplex k-space frames of identical magnitude M(kx, ky),kx � 1. . . M, ky � 1. . . N such that C � {M(kx, ky)exp{i0(kx, ky) � i(kx, ky)} �L((kx, ky)) � 0}. Droppingthe indices (kx, ky), henceforth,
1. The phase correction step defines a projection onto C.2. Set C approximates a convex set over a region of
interest R � C containing members with phase bounded bymax: �max � � max. The error of approximation isproportional to max
2 .3. The k-space box projection P1 with box radius im-
poses a bound max2 on the phase of the intermediate POCS
solution at every iteration, with max � .Proof.
1. For any A � M exp�i�0 � ��, we have A�� M exp�i�0 � H���� � C, since L�H��� � 0. Hence, P2
defines a projection onto C.2. Let A1 � M exp�i�0 � 1��, A2 � M exp�i�0
� 2�� be two members of C. We need to show that A� �A1 � �1 � ��A2also belongs to C. We have A� M exp�i0��� exp�i1� � �1 � ��exp�i2��.
Linearizing the expression within square brackets by theTaylor series we obtain
�� � 1 � �� � ��1 � �1 � �2�� �i2
��12 � �1 � ��2
2�
� higher order terms. [A1]
Higher-order terms can be safely omitted for small 1 and2. Expanding this in a Taylor series in (�1 � (1 � �) 2)by completing the square for quadratic terms and omittinghigher terms,
A� 1 � M exp�i0��exp�i��1 � �1 � ��2�� � E�, [A2]
where the error term E is the residue from completing thesquare. Clearly, A� 1 belongs to C up to error E, since L(�1
� (1 � �2)) � 0. It follows easily that E ���1 � ��
2(1 � 2)2. Given that �max � 1, 2 � max, clearlythe maximum error Emax � max
2 occurs at � � 1/2,1 � �2 � max.
656 Raj et al.

3. From Fig. 2, every k-space point F of any solutionmust reside within the circle of radius Fref in the com-plex plane, where Fref is the reference. Then the maximumphase difference between any two points in that circle ismax as shown in Fig. 2. Since a tangent subtends a rightangle from the center, sin(max) � . Proof follows fromsmall angle approximation of sines.
APPENDIX B: ANALYSIS OF TRANSLATIONALPHASE
A global translation of (�x, �y) in image I(x,y) and itsk-space dual K(kx, ky) � �(I(x,y)), leads to linear phase ink-space given by K�(kx, ky) � K(kx, ky) exp{i c (�x kx � �y
ky)}, for some constant c. This phase, a ramp in k-space, isobviously band-limited. Proving band-limitedness of non-global translation rigorously is difficult; we prove it for anN-piece translation model (25):
K��kx,ky� � �i�0
N
Ki�kx,ky�exp�ic�xikx��yiky�, [B1]
where each Ki is the transform of an image piece undergo-ing translation by (�xi, �yi). As N 3 �, [B1] obviouslymodels any in-plane motion; however, allowing for piece-wise rotations as well, even small N can accurately modelcomplex motions like limb articulation, shifting, trem-bling, etc.Definition.
Let �(W) be the set of 2D functions (kx, ky):�23 �
whose Fourier transform �() is limited to the low spectralband [�W, W] [�W, W], with W being the cutoff fre-quency.Proposition 2.
The phase difference between the corrupted and refer-ence frame, �(K�, K) � (K�) � (K) belongs to �(W), i.e.,is band-limited. Consequently, the power spectral densityof �(K�, K) is concentrated in the low spectral region[�W,W] [�W,W].
To keep the analysis uncluttered, we only consider thetwo-piece model,
K��kx,ky� � K1�kx,ky�exp�i1�kx,ky��
� K2�kx,ky�exp�i2�kx,ky�� � exp�ic�xkx � �yky�, [B2]
where (�) denotes the phase, K1 is the stationary compo-nent, and K2 undergoes translation. However, this does notcause loss of generality due to the following theorem(proved in (25)).Theorem 2.
If Prop. 2 holds for the two-piece model [B2], it alsoholds for N-piece model [B1]. That is, the phase difference�(K�, K) is band-limited for [B1] as well: �(K�, K) ��(W).
We now derive the phase � � � � caused by thetwo-piece translation model [B2].
Expression forPhase Difference
We model (kx, ky) as a random process uniformly distrib-uted in [��, �] with a power spectral density exhibiting
3-dB cutoff at angular frequency W0; this is a popularstochastic model of phase. Let �(kx, ky) � c(�x kx � �y ky)be the phase term due to translation. Let (kx, ky) and�i(kx, ky) be the phase before and after motion. Theorem3, proved in (25), summarizes the main result.Theorem 3.
Let �, , � be defined as above, and let the phases ofcomponents K1 and K2 prior to translation be 1 and 2,respectively. Let � � K2 / K be the ratio of the movingsignal strength to the overall signal strength. Then theoverall phase change is
�
� sin�1� ��sin� � 2� � sin�2 � � ���
�1 � 4�2sin2��/2� � 4�sin� � 2 � �/2�sin��/2��.
[B3]
General spectral analysis of [B3] is difficult, but demon-strative results were obtained for special cases correspond-ing to K1 �� K2 , K1 � K2 , and K1 �� K2 , covering allscenarios. We derived bandwidth formulas for each caseand proved low leakage outside spectral band [�W0,W0].
REFERENCES
1. Prince MR, Grist TM, Debatin JF. 3D contrast MR angiography. Berlin:Springer-Verlag; 1998.
2. Wang Y, Johnston DL, Breen JF, Huston J, 3rd, Jack CR, Julsrud PR,Kiely MJ, King BF, Riederer SL, Ehman RL. Dynamic MR digital sub-traction angiography using contrast enhancement, fast data acquisition,and complex subtraction. Magn Reson Med 1996;36:551–556.
3. Hennig J, Scheffler K, Laubenberger J Strecker R. Time-resolved projec-tion angiography after bolus injection of contrast agent. Magn ResonMed 1997;37:341–145.
4. Zhang HL, Khilnani NM, Prince MR, Winchester PA, Golia P, Veit P,Watts R, Wang Y. Diagnostic accuracy of time-resolved 2D projectionMR angiography for symptomatic infrapopliteal arterial occlusive dis-ease. Am J Roentgenol. 2005;184:938–947.
5. Yoo SK, Watts R, Winchester PA, Zabih R, Wang Y, Prince MR. Post-processing techniques for time-resolved contrast-enhanced MR angiog-raphy. Radiology 2002;222:564–568.
6. Zoroofi R. Cancellation of MRI artifacts in image plane. IEEE Trans MedImaging 1996;5:178–182.
7. Park N, Kim E. Cancellation of MRI motion artifact in image plane. In:Proceedings of IEEE I&M Technical Conference, 2002. p 329–334.
8. Miller KL, Pauly JM. Nonlinear phase correction for navigated diffusionimaging. Magn Reson Med 2003;50:343–353.
9. Hoge WS. A subspace identification extension to the phase correlationmethod. IEEE Trans Med Imaging 2003;22:223–227.
10. Ehman RL, Felmlee JP. Adaptive technique for high-definition MRimaging of moving structures. Radiology 1989;173:255–263.
11. Hedley M, Yan H, Rosenfeld D. Motion artifact correction in MRI usinggeneralized projections. IEEE Trans Med Imaging 1991;10:40–46.
12. Weerasinghe C,Yan H. An improved algorithm for rotational motionartifact suppression in MRI. IEEE Trans Med Imaging 1998;17:310–317.
13. Weerasinghe C, Yan H, Ji L. Fast method for estimation of objectrotation function in MRI using a similarity criterion among k-spaceoverlap data. Signal Proc 1999;78:215–230.
14. Atkinson D, Hill DL, Stoyle PN, Summers PE, Keevil SF. Automaticcorrection of motion artifacts in magnetic resonance images using anentropy focus criterion. IEEE Trans Med Imaging 1997;16:903–910.
15. Manduca A, McGee KP, Welch EB, Felmlee JP, Grimm RC, Ehman RL.Autocorrection in MR imaging: adaptive motion correction withoutnavigator echoes. Radiology 2000;215:904–909.
16. Picard Y, Thompson CJ. Motion correction of PET images using mul-tiple acquisition frames. IEEE Trans Med Imaging 1997;16:137–144.
17. Gmelin E, Weiss HD, Buchmann F. Cardiac gating in intravenous DSA.Eur J Radiol 1986;6:24–29.
POCS Motion Correction in 2D MRA 657

18. Meijering EH, Niessen WJ, Viergever MA. Retrospective motion correc-tion in digital subtraction angiography: a review. IEEE Trans MedImaging 1999;18:2–21.
19. Ferreira PJ. Interpolation and the discrete Gerchberg-Papoulis algo-rithm. IEEE Trans Signal Proc 1994;42:22–29.
20. Ratakonda K, Ahuja N. POCS-based adaptive image magnification. In:Proceedings of ICIP, 1998. p 1231–1235.
21. Oskoui-Fard P, Stark H. Tomographic image reconstruction using con-vex projections. IEEE Trans Med Imaging 1988;7:45–58.
22. Xu Y, Haacke EM. Partial Fourier imaging in multi-dimensions: ameans to save a full factor of two in time. J Magn Reson Med 2001;14:628–635.
23. Gubin LG, Polyak BT, Raik EV. The method of projections for findingthe common point of convex sets. USSR Comput Math Math Phys1967;7:1–24.
24. Opial Z. Weak convergence of the sequence of successive approxima-tions for nonexpansive mappings. Bull Am Math Soc 1967;73:591–597.
25. Raj A. A signal processing and machine vision approach to problems inmagnetic resonance imaging. PhD Thesis, Cornell University, May2005.
26. Stoica P, Moses RL. Introduction to spectral analysis. New York:Prentice-Hall; 1997.
27. Kim J, Prince MR, Zabih R, Bezanson J, Watts R, Erel HE, Wang Y.Automatic selection of mask and arterial phase images for temporally-resolved MR digital subtraction angiography. Magn Reson Med 2002;48:1004–1010.
28. Hedley M, Rosenfeld D. A new two-dimensional phase unwrappingalgorithm for MRI images. Magn Reson Med 1992;24:177–181.
29. An L, Xiang QS, Chavez S. A fast implementation of the minimumspanning tree method for phase unwrapping. IEEE Trans Med Imaging2000;19:805–808.
30. Wang Y, Ehman RL. Retrospective adaptive motion correction for nav-igator-gated 3D coronary MR angiography. J Magn Reson Imaging 2000;11:208–214.
658 Raj et al.