Embed Size (px)
Citation preview

Auctions for robotics panel: talking points
• Robotics setting– Incentives usually don’t matter– Problems are combinatorial/multi-attribute
=> modern work on complex auctions & exchanges can be helpful
– Similar to other MAS (at least from a coordination perspective)

Peer-to-peer negotiation
• Marginal cost based contracting [AAAI-93, ICMAS-95, PhD-96]
– Automated cost computation
– Issues emerging from distributed implementation• Parellellism vs monotonicity
• Avoiding msg saturation
• Termination, …
– Contracting as hill-climbing [AAAI SS-98]
– OCSM-contracts [AAAI SS-98, ICMAS-98, AAAI-99, ICDCS-00]
• Leveled commitment contracts [ICMAS-95, AAAI-96, IJCAI-99, GEB-01, AIJ-02]
– Sequences – cascades [ICMAS-98, J. Econ. Dynamics & Control-01]

Mediated markets
• Removes negotiation process uncertainty => better allocations
• Usually faster as well• Package bidding expressive competition [DCR-01, GEB-
06, Interfaces-06, IAAI-06, …]
– Rich forms of offer constructs
– Side constraints
– Multi-attribute functionality
• Preference elicitation from the different parties (studied for CAs & CEs already) [EC-01, AAAI-02, EC-03, …]
– Focuses the agents’ marginal cost/value computations

Deliberation control
• Heuristically in peer-to-peer negotiation [AAAI-93, ICMAS-95, PhD-96]
• Game-theoretically– Impossibility results [ICMAS-96, ICEC-00, AAMAS-05]
– Using performance profile trees• in auctions [TARK-01, AGENTS WS-01, AAMAS-03, AAMAS-04]
• in bargaining [AIJ-01, AAMAS-02]

Online problem
• Has been studied for multi-unit– auctions [Lavi & Nisan EC-00, …]
– exchanges [Blum, Sandholm, Zinkevich SODA-02, JACM-06]
• Thank you for your attention!

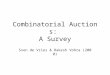
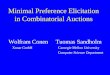
Preference elicitationfrom multiple agents

<footer>
Monsters
• Local planning complexity
• Communication complexity
• (Loss of privacy)

Clearing algorithm
What info is needed from an agent depends on what others have revealed
Elicitor
Conen & Sandholm IJCAI-01 workshop on Econ. Agents, Models & Mechanisms, ACMEC-01
Elicitor decides what to ask next based on answers it has received so far
$ 1,000 for
$ 1,500 for
? for