Embed Size (px)
Citation preview
Attitude Determination
- Using GPS
20/12-2000 (MJ) Danish GPS Center 2
Table of ContentsTable of Contents
• Definition of Attitude• Attitude and GPS• Attitude Representations• Least Squares Filter• Kalman Filter• Other Filters• The AAU Testbed• Results• Conclusion
20/12-2000 (MJ) Danish GPS Center 3
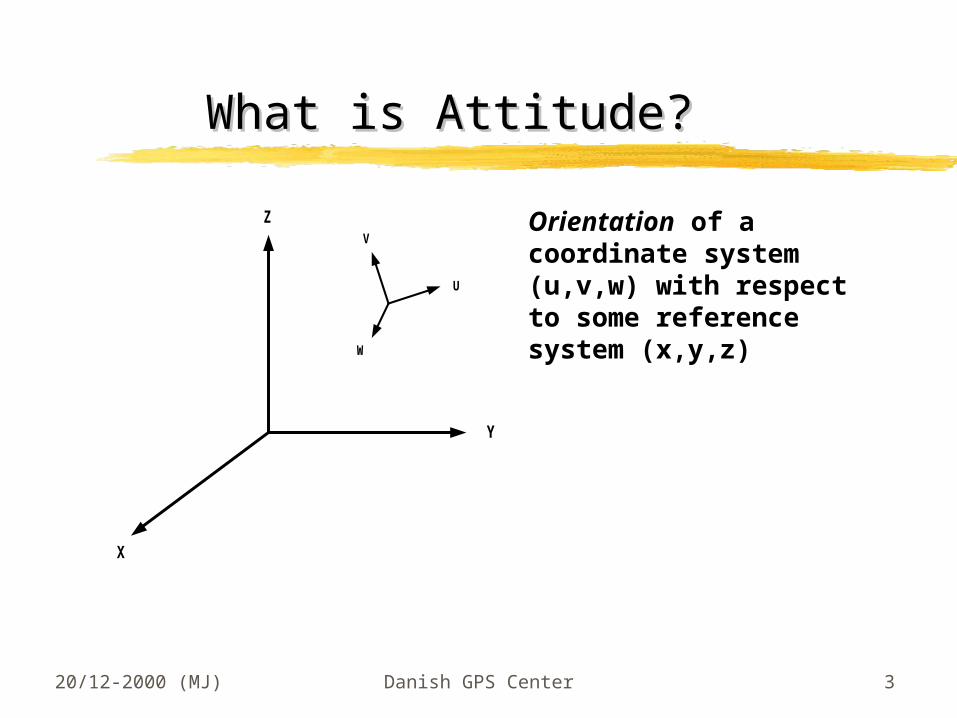
What is Attitude?What is Attitude?
Orientation of a coordinate system (u,v,w) with respect to some reference system (x,y,z)
V
U
W
Z
Y
X
20/12-2000 (MJ) Danish GPS Center 4
When is Attitude information needed?When is Attitude information needed?
• Controlling an Aircraft, Boat or Automobile• Onboard Satellites• Pointing of Instruments• Pointing of Weapons• Entertainment industri (VR)• Etc...
20/12-2000 (MJ) Danish GPS Center 5
Attitude sensorsAttitude sensors
Currently used sensors include:
• Gyroscopes• Rate gyros (+integration)• Star trackers• Sun sensors• Magnetometers• GPS
20/12-2000 (MJ) Danish GPS Center 6
Advantages of GPSAdvantages of GPS
• Adding new functionality to existing equipment• No cost increase• No weight increase• No moving parts (solid-state)• Measures the absolute attitude
DisadvantagesDisadvantages• Mediocre accuracy (0.1 - 1º RMS error)• Low bandwidth (5-10 Hz maximum)• Requires direct view of satellites
20/12-2000 (MJ) Danish GPS Center 7
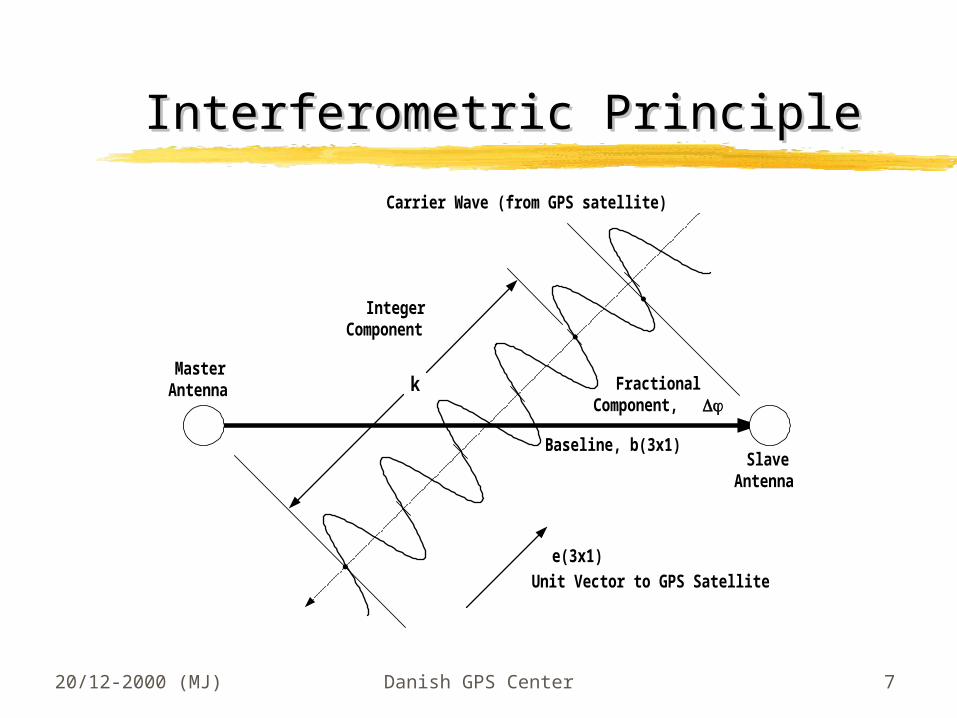
Interferometric PrincipleInterferometric Principle
MasterAntenna
IntegerComponent
k
SlaveAntenna
Carrier Wave (from GPS satellite)
e(3x1)
FractionalComponent,
Baseline, b(3x1)
Unit Vector to GPS Satellite
20/12-2000 (MJ) Danish GPS Center 8
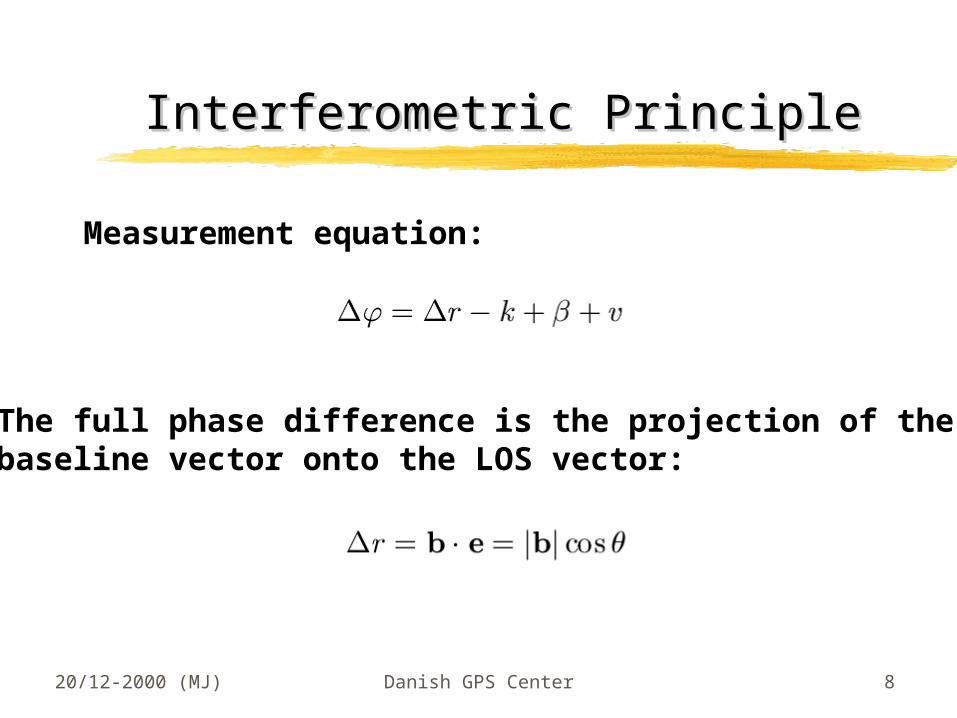
Interferometric PrincipleInterferometric Principle
Measurement equation:
The full phase difference is the projection of thebaseline vector onto the LOS vector:
20/12-2000 (MJ) Danish GPS Center 9
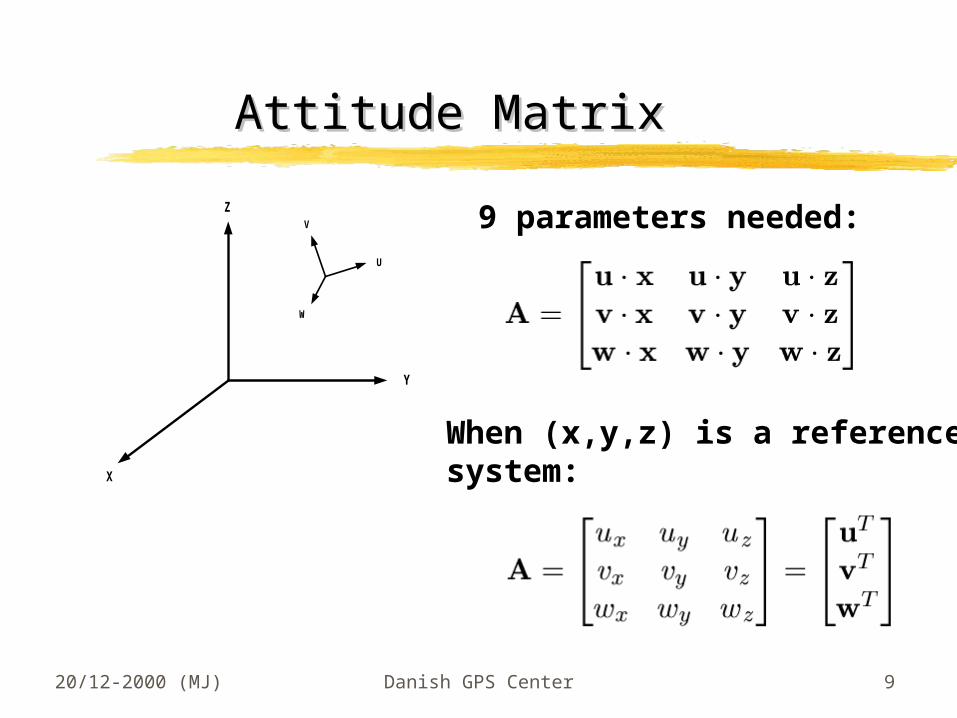
Attitude MatrixAttitude Matrix
V
U
W
Z
Y
X
9 parameters needed:
When (x,y,z) is a referencesystem:
20/12-2000 (MJ) Danish GPS Center 10
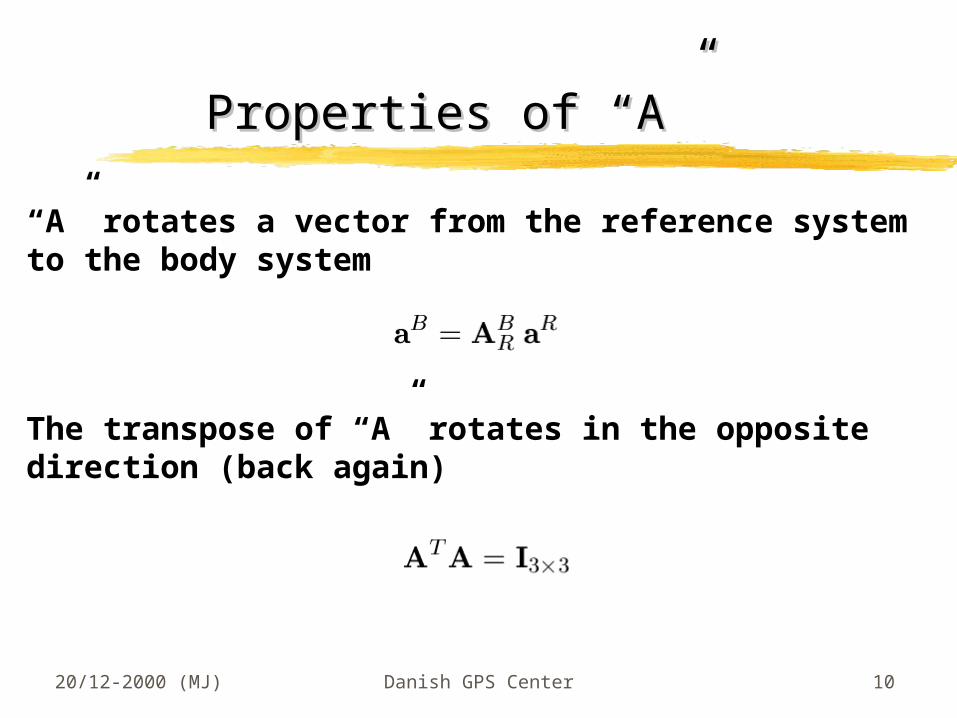
Properties of “A”Properties of “A”
“A” rotates a vector from the reference systemto the body system
The transpose of “A” rotates in the oppositedirection (back again)
20/12-2000 (MJ) Danish GPS Center 11
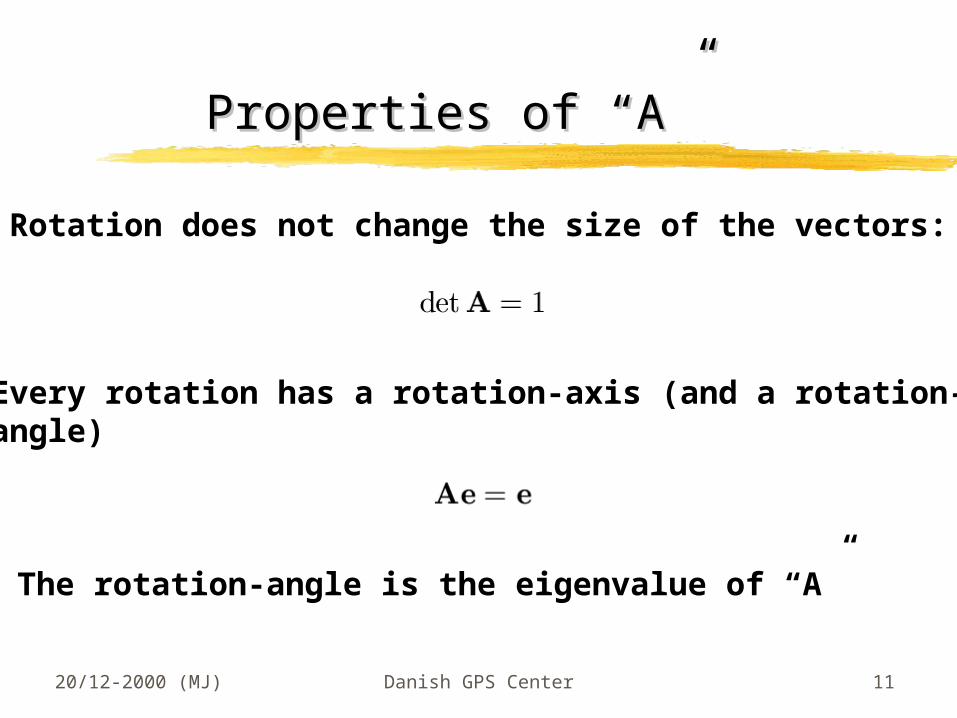
Properties of “A”Properties of “A”
Rotation does not change the size of the vectors:
Every rotation has a rotation-axis (and a rotation-angle)
The rotation-angle is the eigenvalue of “A”
20/12-2000 (MJ) Danish GPS Center 12
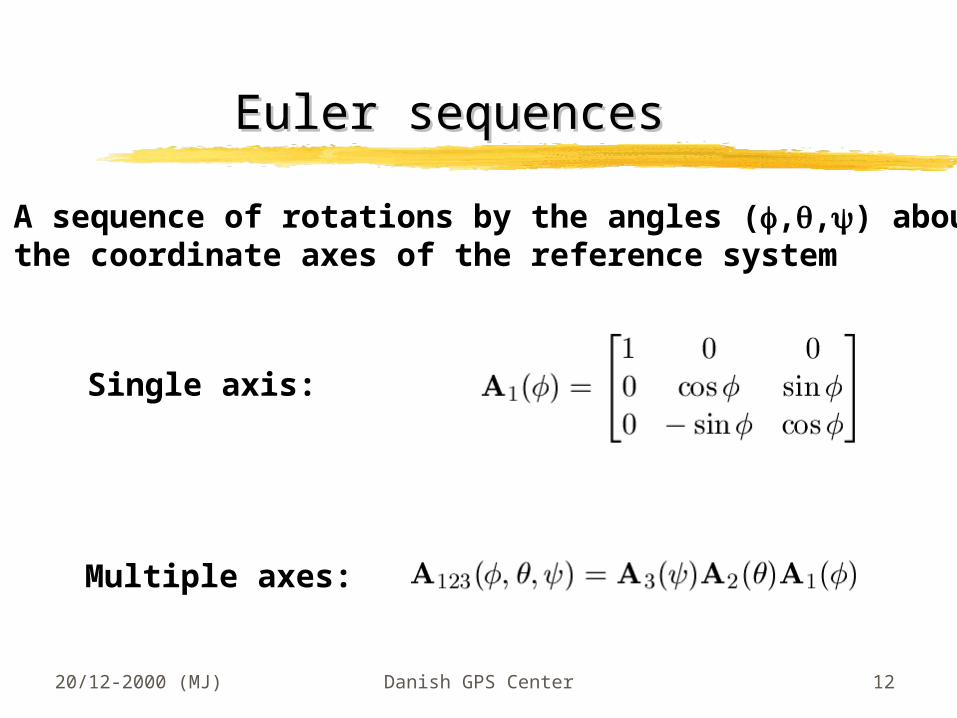
Euler sequencesEuler sequences
A sequence of rotations by the angles (,,) aboutthe coordinate axes of the reference system
Single axis:
Multiple axes:
20/12-2000 (MJ) Danish GPS Center 13
QuaternionsQuaternions
A quaternion consists of four composants
Where i,j and k are hyperimaginary numbers
20/12-2000 (MJ) Danish GPS Center 14
QuaternionsQuaternions
A quaternion can be thought of as a 4 dimensionalvector with unit length:
20/12-2000 (MJ) Danish GPS Center 15
QuaternionsQuaternions
Quaternions represent attitude as a rotation-axisand a rotation-angle
20/12-2000 (MJ) Danish GPS Center 16
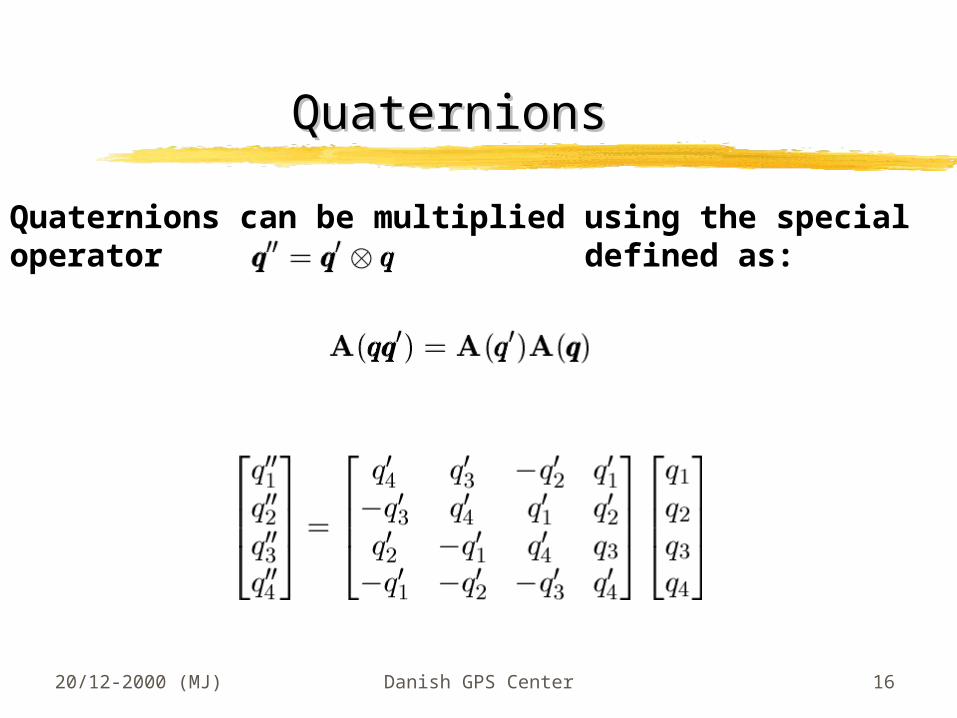
QuaternionsQuaternions
Quaternions can be multiplied using the specialoperator defined as:
20/12-2000 (MJ) Danish GPS Center 17
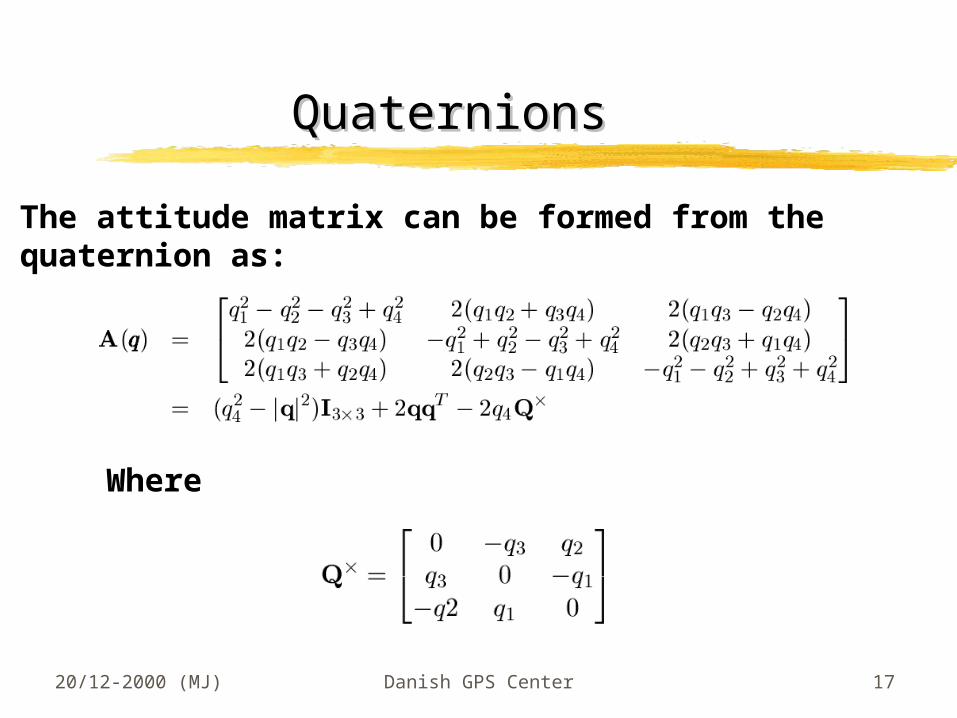
QuaternionsQuaternions
The attitude matrix can be formed from thequaternion as:
Where
20/12-2000 (MJ) Danish GPS Center 18
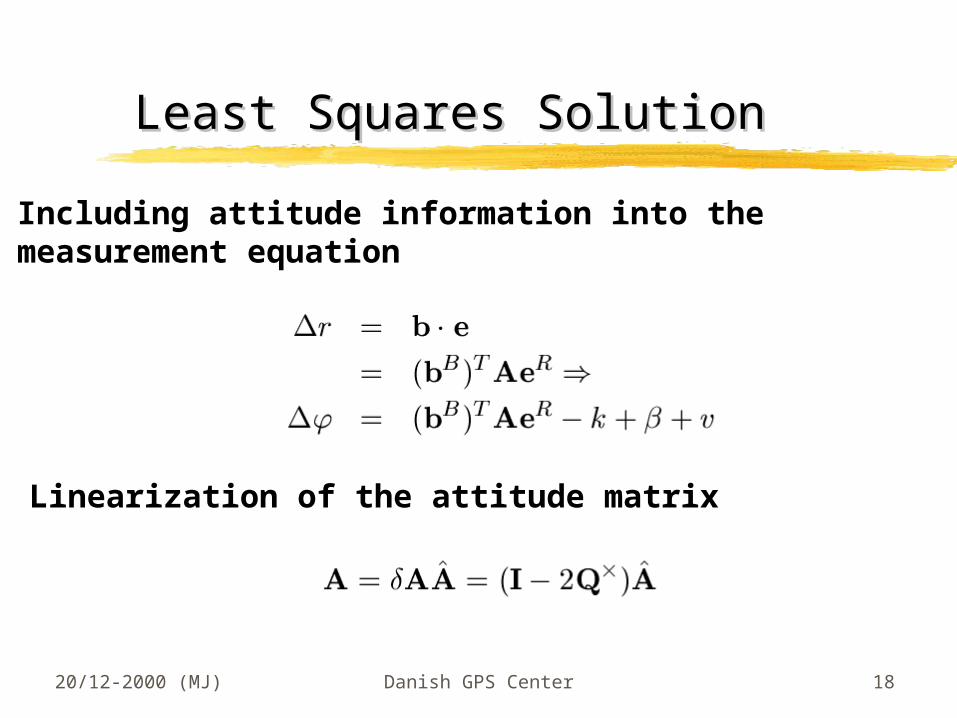
Least Squares SolutionLeast Squares Solution
Including attitude information into themeasurement equation
Linearization of the attitude matrix
20/12-2000 (MJ) Danish GPS Center 19
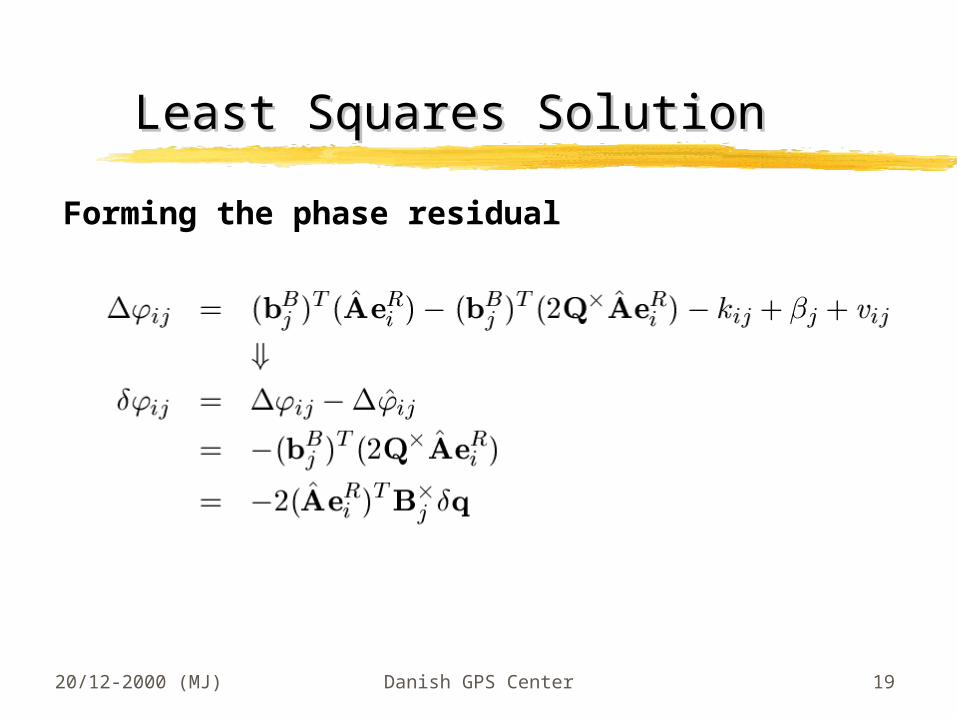
Least Squares SolutionLeast Squares Solution
Forming the phase residual
20/12-2000 (MJ) Danish GPS Center 20
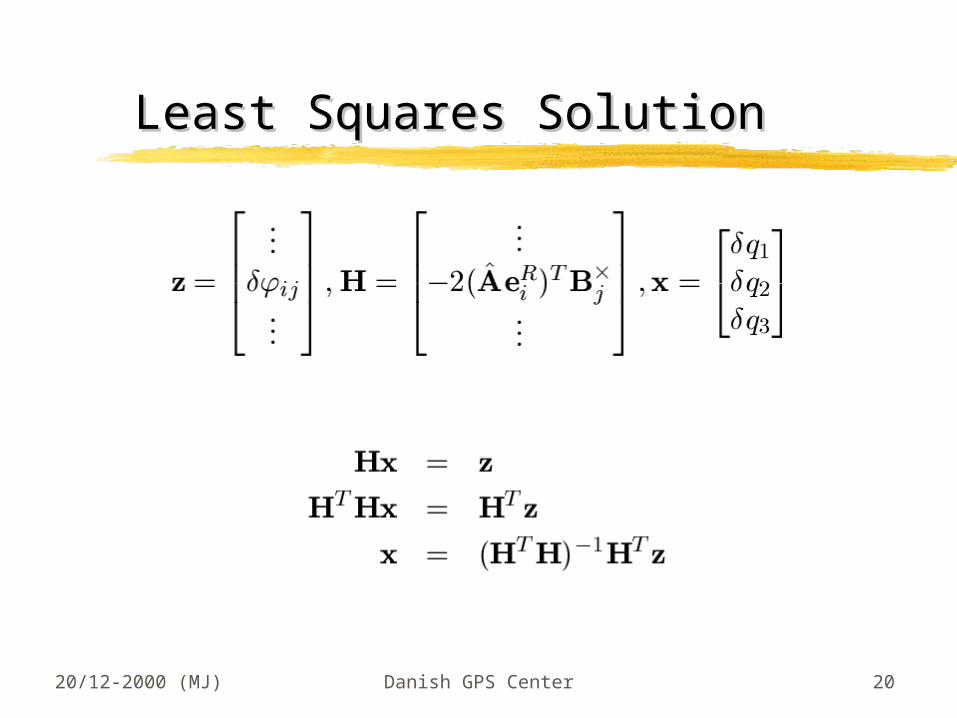
Least Squares SolutionLeast Squares Solution
20/12-2000 (MJ) Danish GPS Center 21
Least Squares SolutionLeast Squares Solution
Estimate update
20/12-2000 (MJ) Danish GPS Center 22
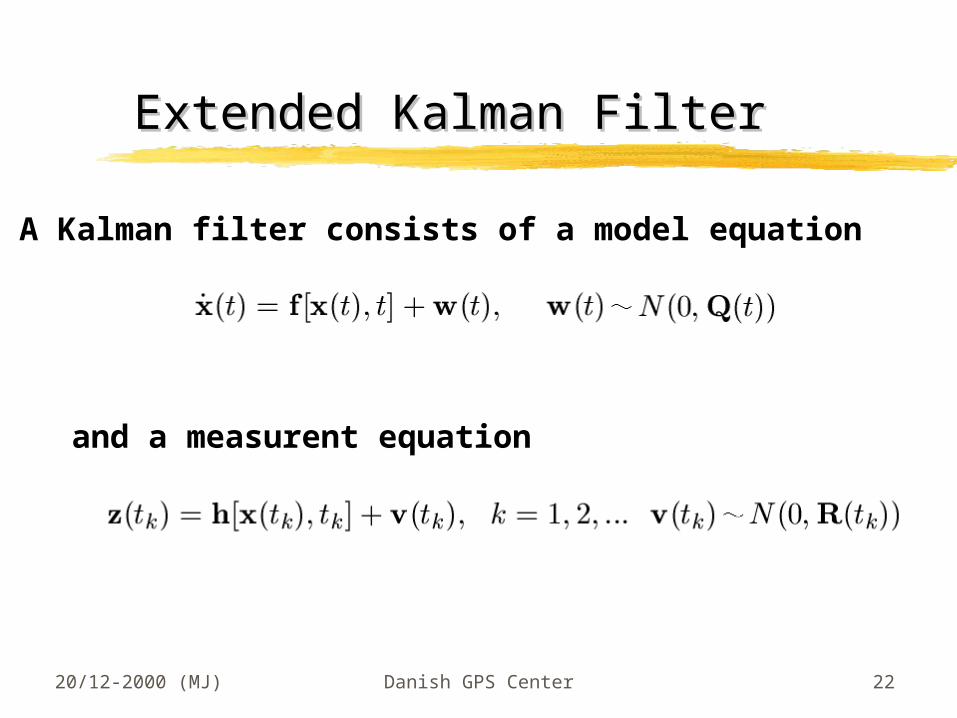
Extended Kalman FilterExtended Kalman Filter
A Kalman filter consists of a model equation
and a measurent equation
20/12-2000 (MJ) Danish GPS Center 23
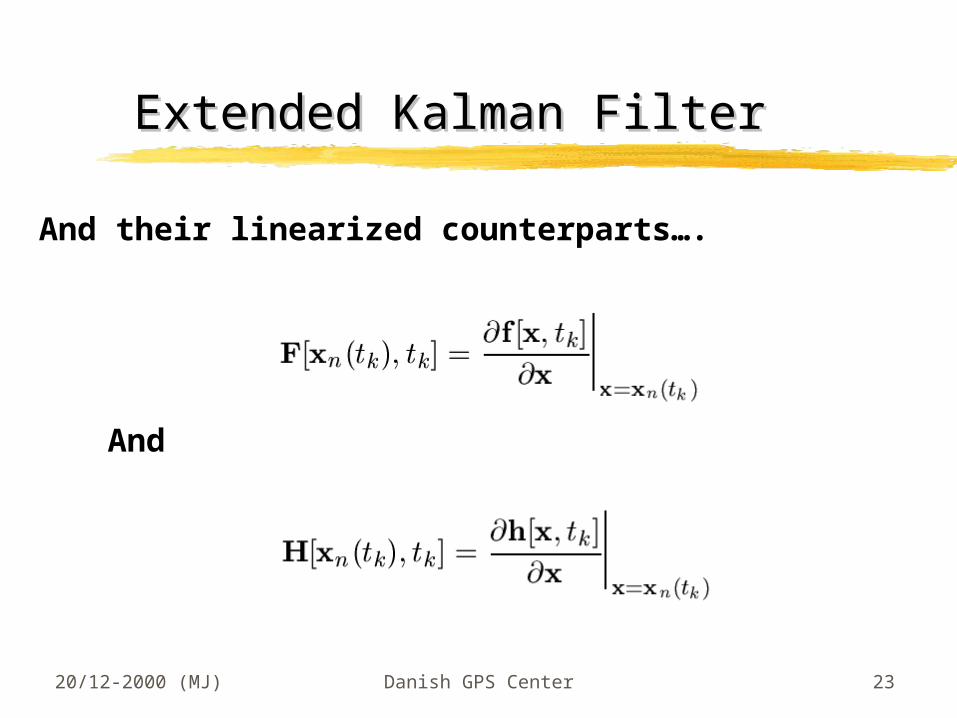
Extended Kalman FilterExtended Kalman Filter
And their linearized counterparts….
And
20/12-2000 (MJ) Danish GPS Center 24
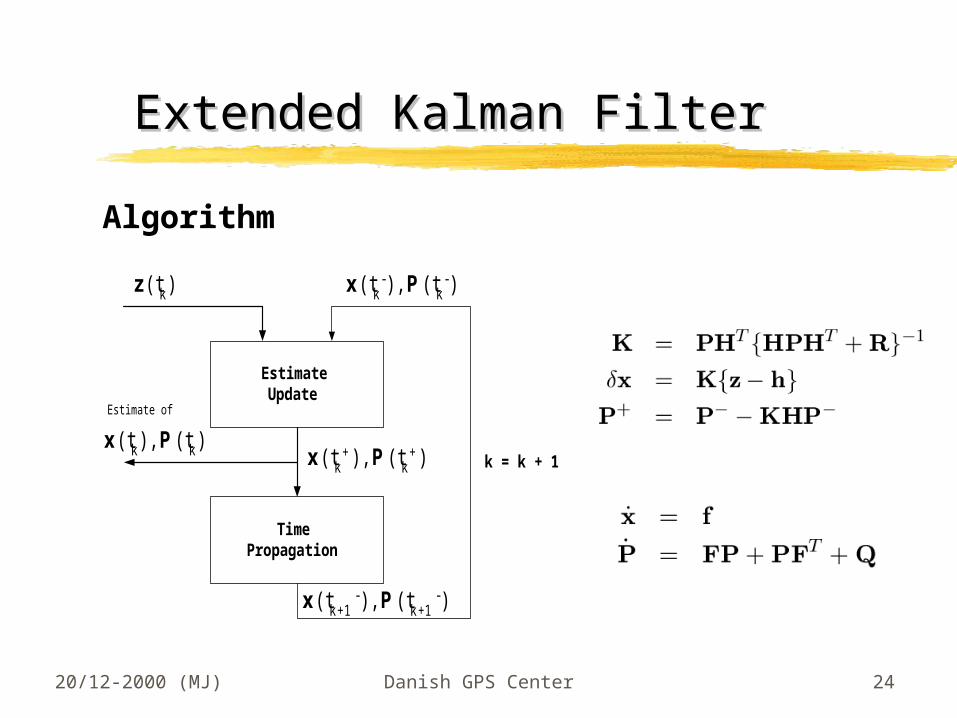
Extended Kalman FilterExtended Kalman Filter
EstimateUpdate
TimePropagation
z(t k) x(t k-), P (t k
-)
x(t k+), P (t k
+)
x(t k+1-), P (t k+1
-)
x(t k), P (t k)k = k + 1
Estimate of
Algorithm
20/12-2000 (MJ) Danish GPS Center 25
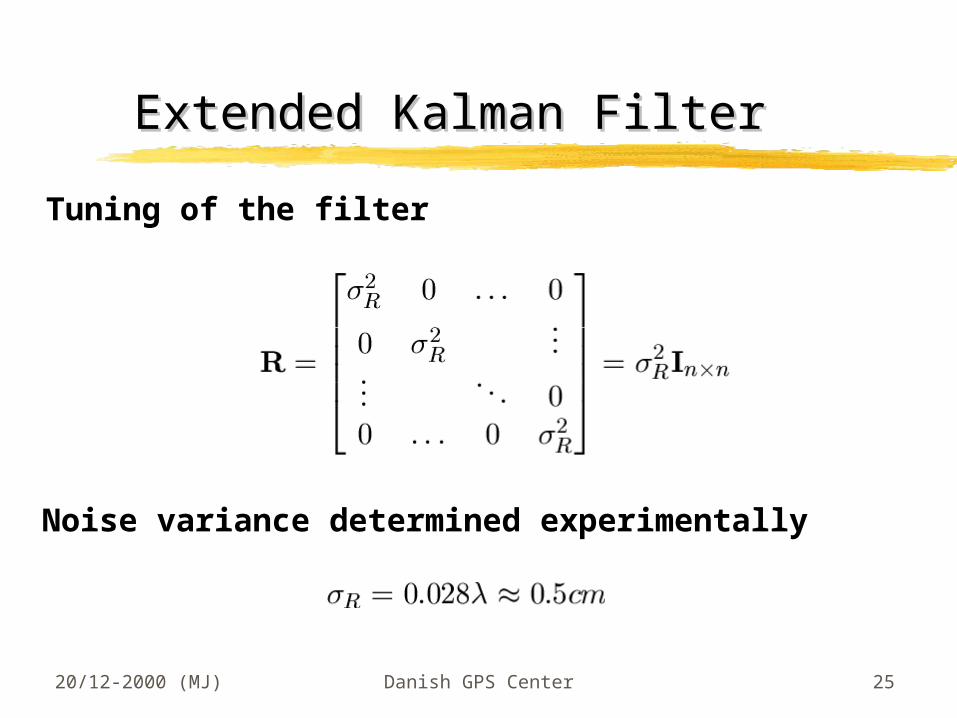
Extended Kalman FilterExtended Kalman Filter
Tuning of the filter
Noise variance determined experimentally
20/12-2000 (MJ) Danish GPS Center 26
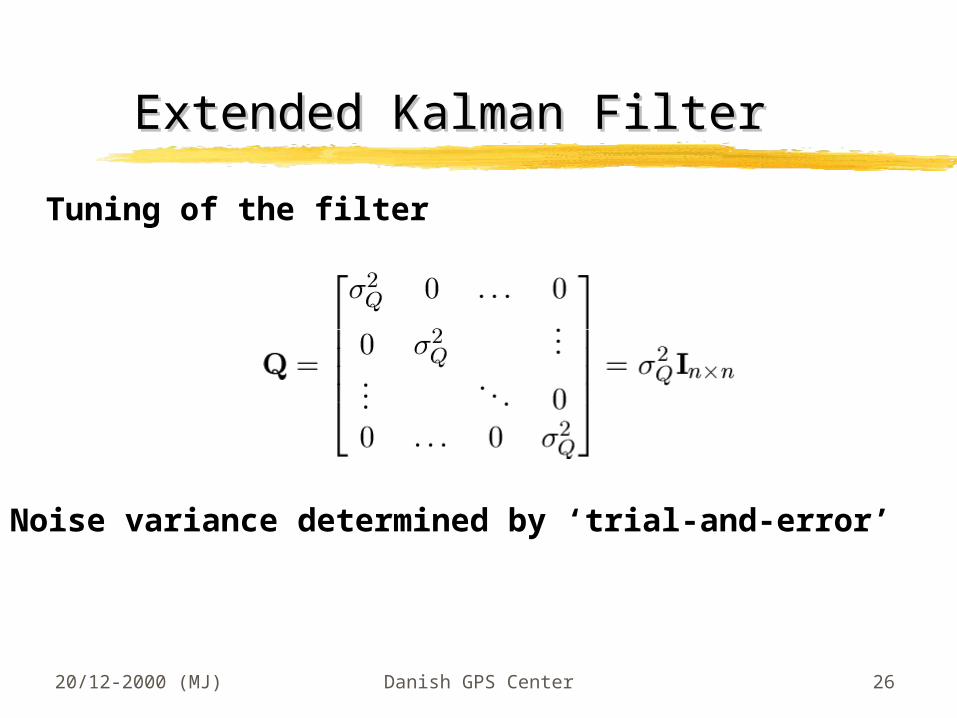
Extended Kalman FilterExtended Kalman Filter
Tuning of the filter
Noise variance determined by ‘trial-and-error’
20/12-2000 (MJ) Danish GPS Center 27
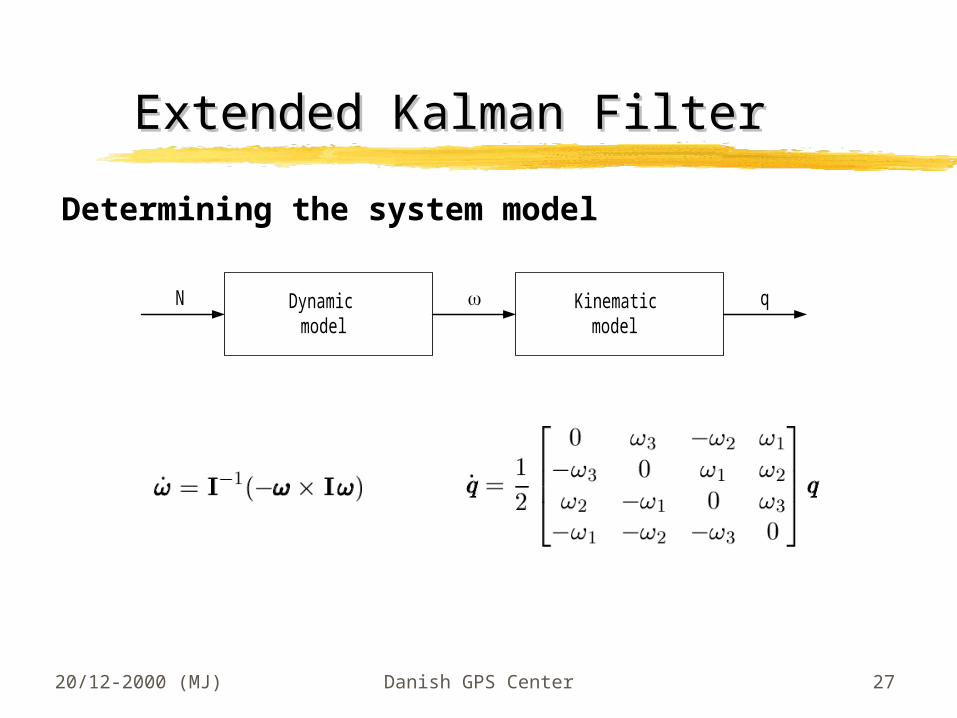
Extended Kalman FilterExtended Kalman Filter
Determining the system model
Dynamicmodel
Kinematicmodel
N q
20/12-2000 (MJ) Danish GPS Center 28
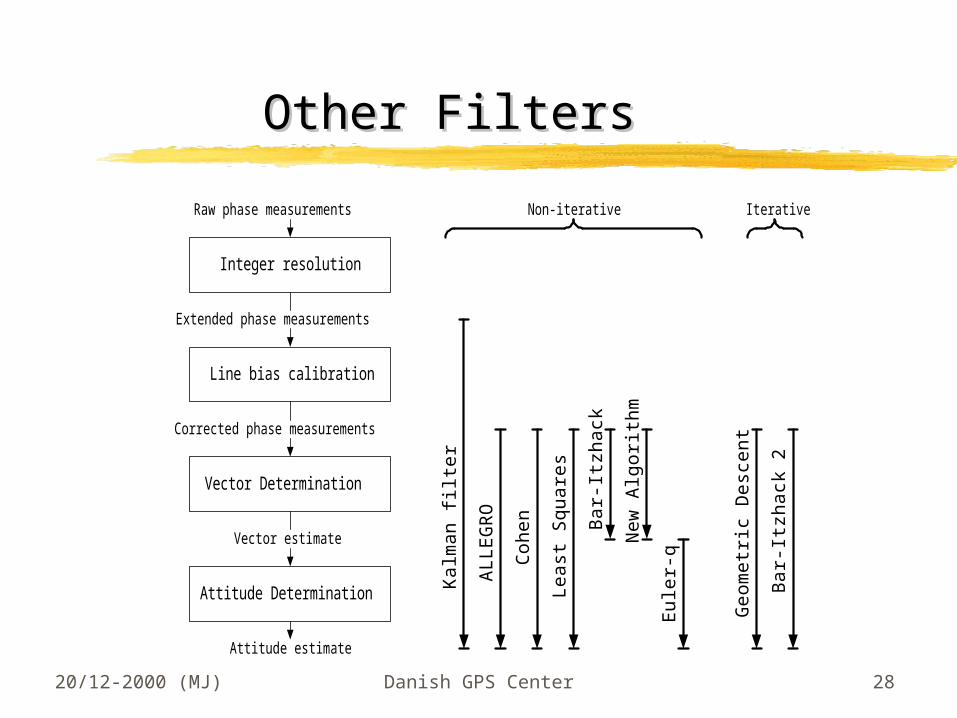
Other FiltersOther Filters
Line bias calibration
Vector Determination
Attitude Determination
Integer resolution
Raw phase measurements
Extended phase measurements
Corrected phase measurements
Vector estimate
Attitude estimate
Ka
lma
n f
ilte
r
AL
LE
GR
O
Co
he
n
Le
ast
Sq
ua
res
Ba
r-It
zha
ck
Ne
w A
lgo
rith
m
Eu
ler-
q
Ge
om
etr
ic D
esc
en
t
Ba
r-It
zha
ck 2
Non-iterative Iterative
20/12-2000 (MJ) Danish GPS Center 29
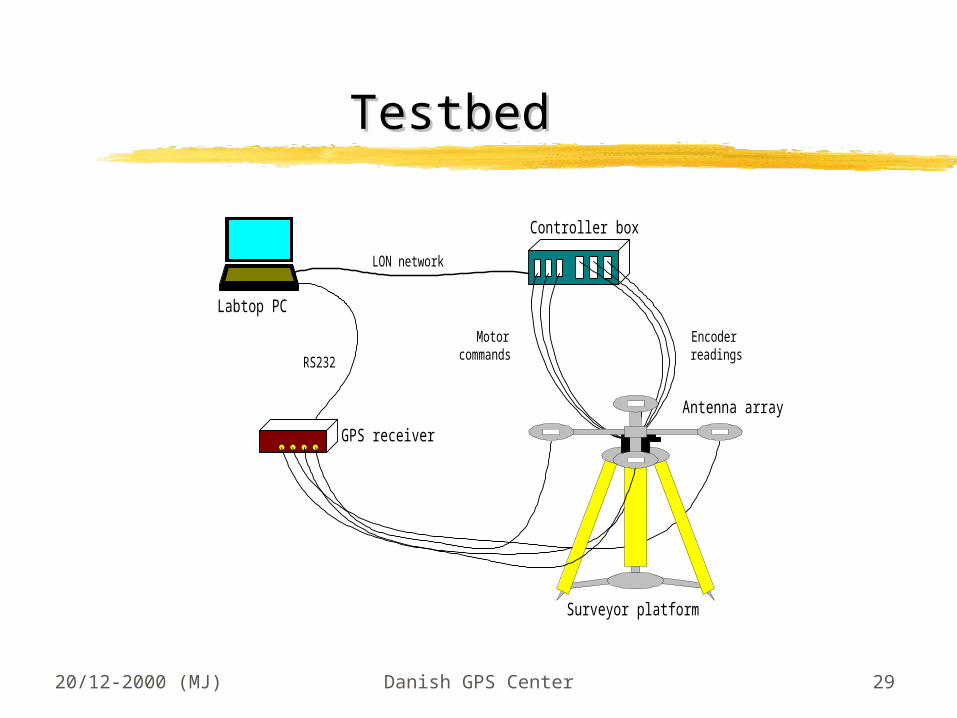
TestbedTestbed
Labtop PC
GPS receiver
Controller box
Surveyor platform
Antenna array
LON network
RS232
Motorcommands
Encoderreadings
20/12-2000 (MJ) Danish GPS Center 30
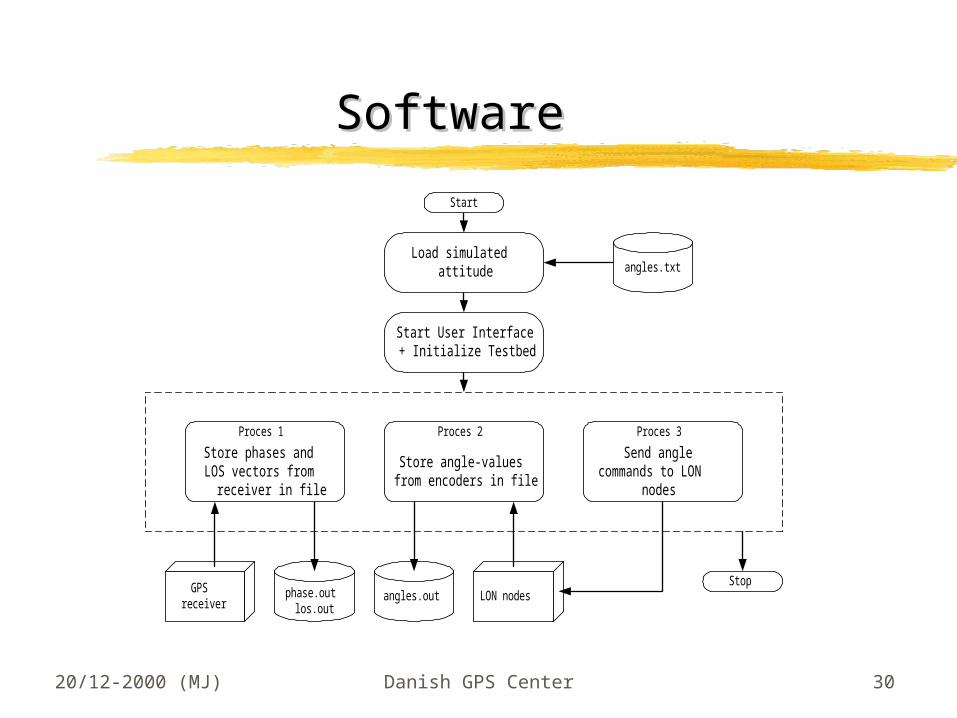
SoftwareSoftware
Start
Load simulatedattitude
Start User Interface+ Initialize Testbed
angles.txt
phase.outlos.out
GPSreceiver
angles.out LON nodes
Store angle-valuesfrom encoders in file
Proces 2
Store phases andLOS vectors from
receiver in file
Proces 1
Send anglecommands to LON
nodes
Proces 3
Stop
20/12-2000 (MJ) Danish GPS Center 31
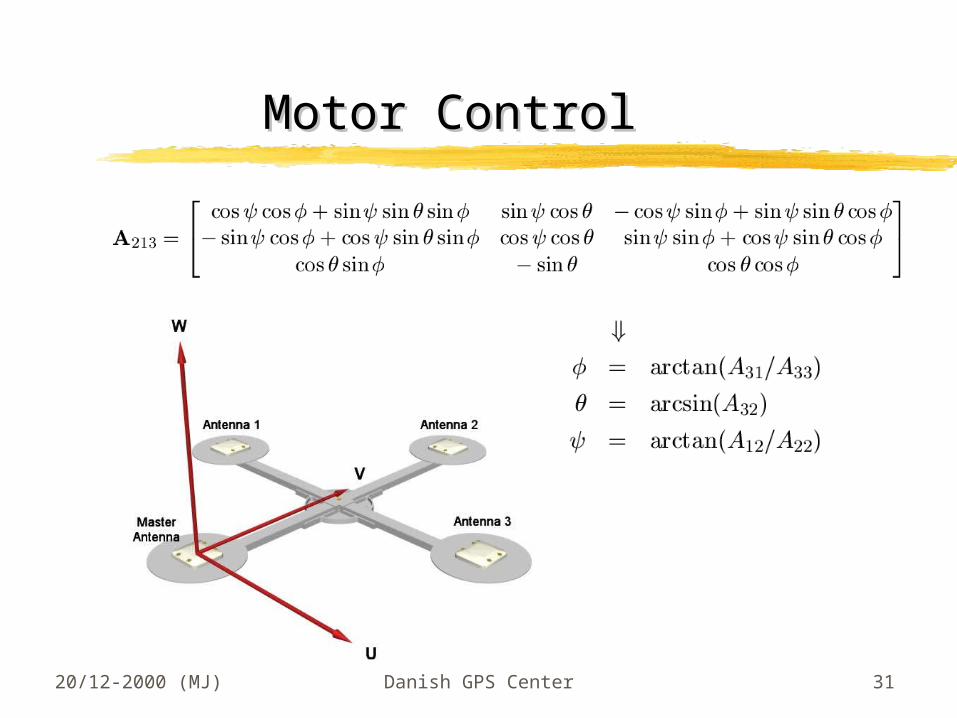
Motor ControlMotor Control
20/12-2000 (MJ) Danish GPS Center 32
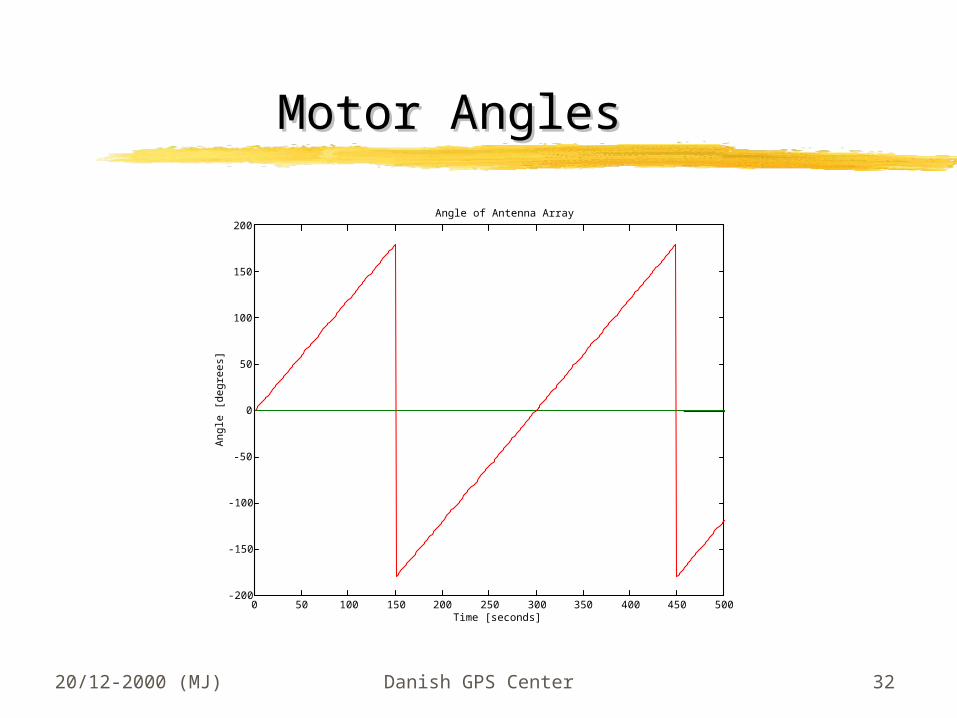
Motor AnglesMotor Angles
0 50 100 150 200 250 300 350 400 450 500-200
-150
-100
-50
0
50
100
150
200
Time [seconds]
An
gle
[d
eg
ree
s]Angle of Antenna Array
20/12-2000 (MJ) Danish GPS Center 33
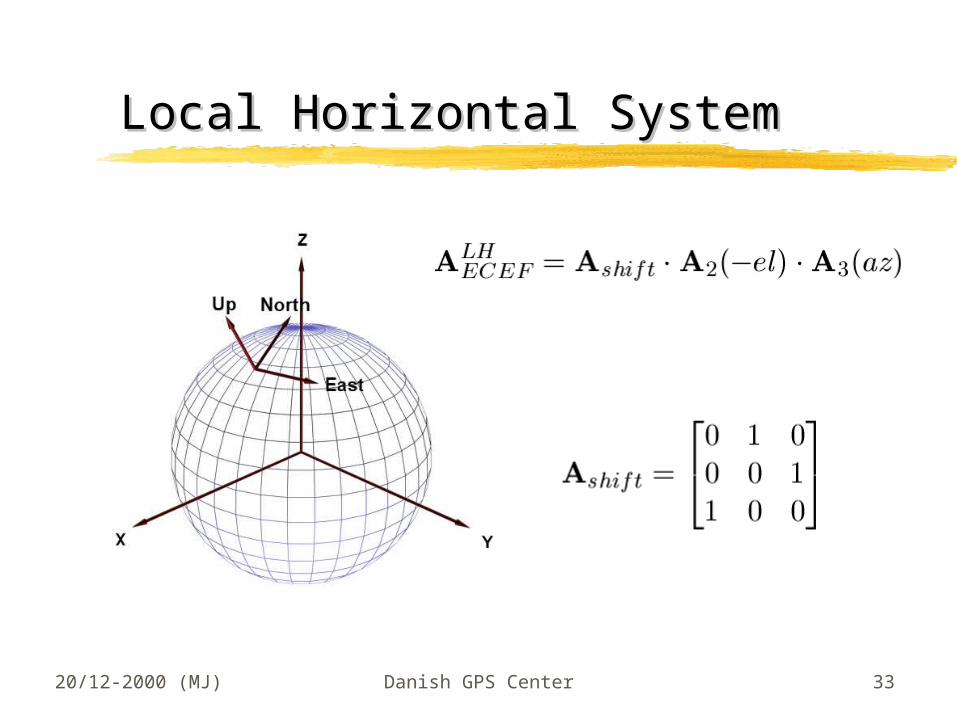
Local Horizontal SystemLocal Horizontal System
20/12-2000 (MJ) Danish GPS Center 34
ResultsResults
Based on actual and simulated data, the followingperformance parameters were evaluated
• Accuracy• Computational efficiency• Ability to converge
20/12-2000 (MJ) Danish GPS Center 35
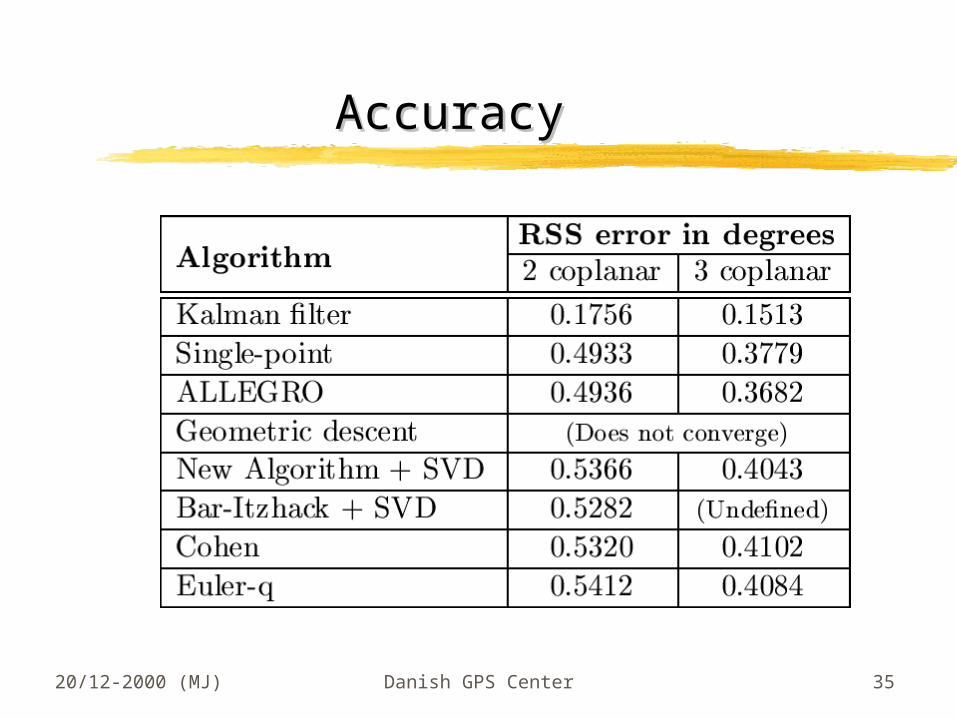
AccuracyAccuracy
20/12-2000 (MJ) Danish GPS Center 36
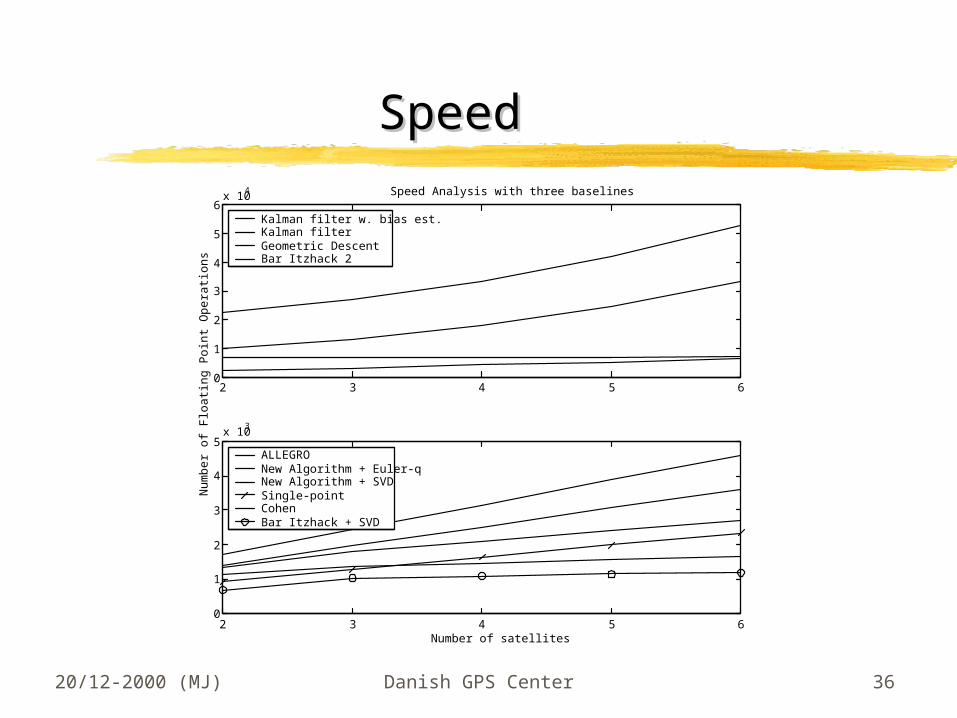
SpeedSpeed
2 3 4 5 60
1
2
3
4
5x 10
3
Number of satellites
ALLEGRO New Algorithm + Euler-qNew Algorithm + SVD Single-point Cohen Bar Itzhack + SVD
2 3 4 5 60
1
2
3
4
5
6x 10
4 Speed Analysis with three baselinesN
um
be
r o
f F
loa
ting
Po
int
Op
era
tion
sKalman filter w. bias est.Kalman filter Geometric Descent Bar Itzhack 2
20/12-2000 (MJ) Danish GPS Center 37
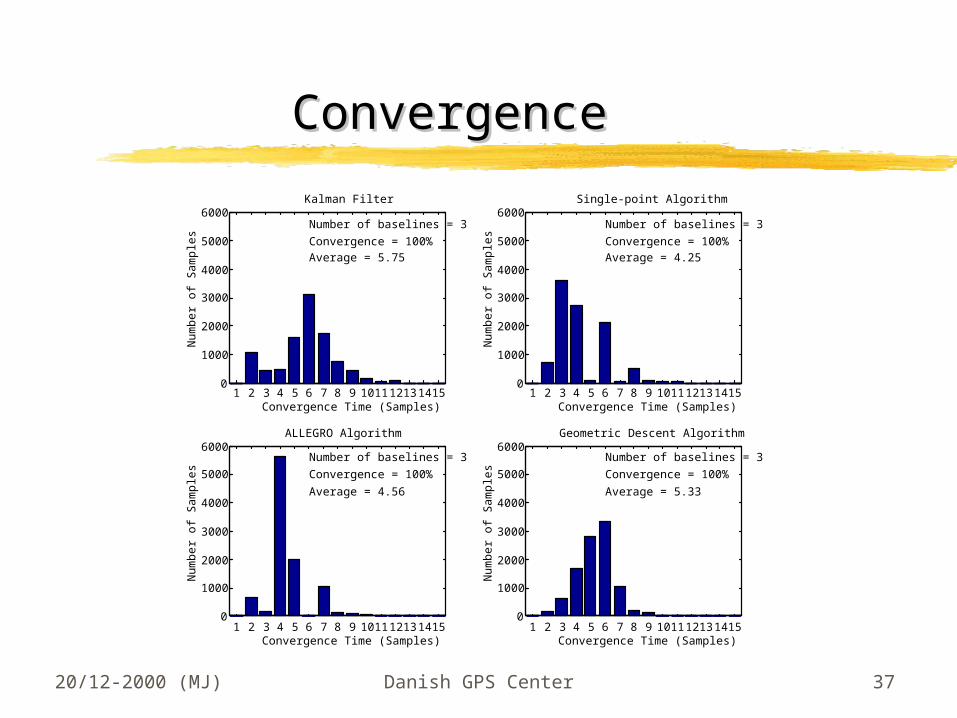
ConvergenceConvergence
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000Kalman Filter
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 3
Convergence = 100%
Average = 5.75
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000Single-point Algorithm
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 3
Convergence = 100%
Average = 4.25
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000ALLEGRO Algorithm
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 3
Convergence = 100%
Average = 4.56
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000Geometric Descent Algorithm
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 3
Convergence = 100%
Average = 5.33
20/12-2000 (MJ) Danish GPS Center 38
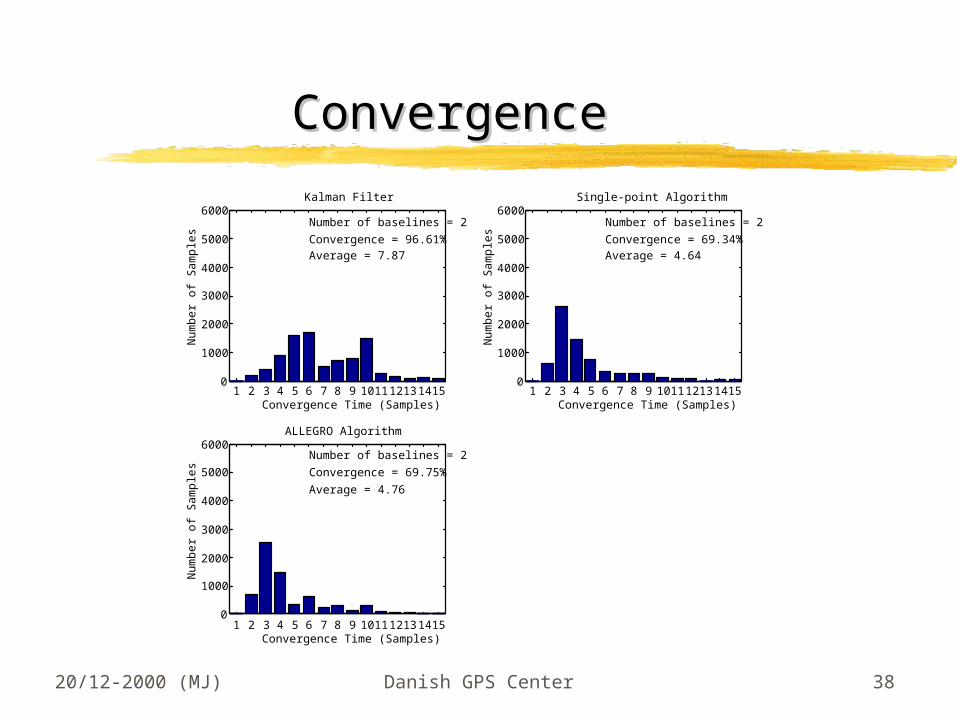
ConvergenceConvergence
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000Kalman Filter
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 2
Convergence = 96.61%
Average = 7.87
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000Single-point Algorithm
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 2
Convergence = 69.34%
Average = 4.64
1 2 3 4 5 6 7 8 9 1011 1213 14150
1000
2000
3000
4000
5000
6000ALLEGRO Algorithm
Convergence Time (Samples)
Nu
mb
er
of
Sa
mp
les
Number of baselines = 2
Convergence = 69.75%
Average = 4.76
20/12-2000 (MJ) Danish GPS Center 39
ConclusionConclusion
• Kalman filter is by far most accurate, but also computationally very heavy
• Single-point (LSQ) offers good accuracy + high speed
• Vector matching algorithms has the lowest accuracy but does not suffer from convergence problems
• Performance depend on satellite constellation
• Results were affected by mechanical problems with levelling of the testbed



























