Embed Size (px)
Citation preview

National Aeronautics and Space Administration
Atmospheric Turbulence Modeling and Shock Positioning Control for a Supersonic Inlet
G K ki
Fundamental Aeronautics – Supersonics ProjectAeroPropulsoServoElasticity Task
George Kopasakis
NASA Glenn Research CenterCl l d OhiCleveland, Ohio
www.nasa.gov 11
Propulsion Controls and Diagnostics (PCD) WorkshopCleveland OH, Dec. 8-10, 2009

National Aeronautics and Space Administration
Atmospheric Turbulence Modeling for High Speed Vehicles
Outline
Motivation/BackgroundMotivation/Background
Atmospheric Turbulence Model Development
-- Approach
-- Formulations
-- Examples (Spectral Densities & Time Domain)
Concluding Remarks
www.nasa.gov 22

National Aeronautics and Space Administration
Atmospheric Turbulence Modeling for High Speed Vehicles
Motivation
-- Atmospheric turbulence modeling needed for both propulsion and flight control designs
-- Atmospheric Turbulence is fractional order (5/3Atmospheric Turbulence is fractional order (5/3 order)-- Current 2nd order model approximation used
d i t ( d ti t ) t 7dB/d d (ideviates (underestimates) up to 7dB/decade (i.e. 20db x 2 vs. 20dB x 5/3)
www.nasa.gov 3

National Aeronautics and Space Administration
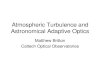
-- Atmospheric models primarily based on the “Kolmogorov Spectral”
Atmospheric Turbulence – Power Spectral-- Atmospheric models primarily based on the Kolmogorov Spectral , developed by Taraski, 1961, based partially on studies by Kolmogorov, 1941.
3532 //tt k)k(S −= εα
α – constant for the type of disturbanceε – eddy dissipation rate (energy/(mass * time))k b ( d/ )
tt
k – wave number (rad/m)
Figure – Wind and PotentialTemperature Spectra as reported byNastrom (1985). Note: for clarity, themeridional wind and temperature spectrahave been shifted one and two decades to
www.nasa.gov 4
the right, respectively.

National Aeronautics and Space Administration
-- Kolmogorov Spectral has infinite energy – increases in magnitude with
Atmospheric Turbulence – Power Spectral-- Kolmogorov Spectral has infinite energy increases in magnitude with decreasing frequency
-- Tank, 1994 scaled the von Karman spectrum to fit the Kolmogorov model
longitudinal disturbance6523532
233911272 /
//VK,l ])Lk)(.([
L.)k(Sπ
ε+
=
transverse disturbance6112
2
3532
233911
23391381
72/
//VK,v
])Lk)(.([
)Lk)(.(L.)k(S
π
πε
+
+=
40 Kolmogorov longitudinal
20
30sp
ectra
l, dB
(m/s
ec/H
z)
g gKolmogorov transversevon Karman longitudinalvon Karman transverse
Figure – Acoustic wave velocity spectralcomparisons for the Kolmogorov and Von -10
0
10
acou
stic
wav
e ve
loci
ty s
www.nasa.gov 5
comparisons for the Kolmogorov and VonKarman spectral
10-2 10-1 100 101 102
frequency , Hz

National Aeronautics and Space Administration
Atmospheric Turbulence – Power Spectral Solution Challenges
-- Atmospheric disturbances are fractional order
g
-- Solution of fractional order derivatives are difficult abbey the law of non-locality state transition matrix is a convolution integral
-- To get around this problem Hoblit, 1998 introduced the Dryden model
2
2
)(112
)(Ωπ
σΩΦ u
uL
L+
=
-- This model is 2nd order instead of 5/3 order, increasingly deviates with frequency (by 7db/decade)
)(1 Ωπ uL+
-- Based on that the idea was born to develop our own fractional order model
www.nasa.gov 6

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
Rtq Wt,VKt
Rtq Wt,VKt
1) 6523532
233911272 /
//VK,l ])Lk)(.([
L.)k(Sπ
ε+
=
3/1
⎟⎞
⎜⎛
1/(Cts)qW 1/(Cts)qWW6/52
3/53/2,
])2
339.1(1[
27.2)(
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+=
oMaf
LLkS VKl π
ε
3/1Circuit Equivalent of Atmospheric Disturbances
2) Formulate circuit parameters in terms of vehicle speed (f= kMa) and atmospheric
3/13/53/2)( ⎟
⎟⎠
⎞⎜⎜⎝
⎛=
−
MafkS tt εα
disturbance parametersL)a)((.R x//
tt13223391 επ=
tt
nf CR
Kωω =, , ,
),( LfKt ε=)2()(
1/13/2
ox
tt Maa
Cπε
=
3) Develop von Karman temperature, pressure and density spectral by scaling the respective Kolmogorov spectral to fit the von Karman spectrum for wind gusts.
4) Pl t K S t l d i i it f l ti f l t i f fi t d
www.nasa.gov 7
4) Plot von Karman Spectral and using circuit formulations, formulate a series of first order pole-zero TF to approximate fractional order TF.

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Development
Step 3. scaling for temperature
p
3/13/5 ⎞⎛
140
3/13/53/2)( ⎟
⎟⎠
⎞⎜⎜⎝
⎛=
−
MafkS tt εα
80
100
120
Tem
p. s
pect
ral,
dB Kolmogorov longitudinalKolmogorov temperaturevon Karman longitudinalscaled von Karman temp
20
40
60
Kar
man
vel
ocity
& T
-40
-20
0
Kol
mog
orov
/Von
K
www.nasa.gov 8
10-2 10-1 100 101 102
frequency, Hz

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Development
Step 4. formulation of pole-zero TF approachp
Fractional order TF
1st order pole-zero TF approximation
mpl
itude
, dB
1 order pole zero TF approximation
d1d2
freq
am
ωH 1
ωHp2ω
ωHp3 ωHp4ω
-- Formulate 1st order pole-zero TF approximation subject to
(a) ωpi zi=f(ωp1..ωpi-1,ωz1..ωzi-1)
freq.ωp1ωz1 ωp2ωz2 ωp3ωz3 ωp4ωHz1 ωHz2 ωHz3
( ) pi, zi ( p1 pi 1, z1 zi 1)
(b) Equal distance: d1=d2=..(symmetry) ωpi, zi=f(ωp1..ωpi-1, ωz1..ωzi-1, ωHpi, ωHzi)
(c) ω=f(circuit parameters)
www.nasa.gov 9
( ) ( p )
(d) TF also function of desirable pole-zero density per decade closer approximation

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
mz
-- Based on this approach the following formulations are derived
tm
pi
zi
fit,to,t W)/s(
)/s(KW
p
z
∏ +
∏ +≅
1
1
1
1
ω
ω
1−i
Generalized atmospheric disturbance TF
1)1/(10
)1/(
1
1
*)12(
1
1
−∏ +
∏ +=
−
=−
−
=−
i
jjziHpi
qi
i
jjpiHpiHpipi
pi
K
ωω
ωωωω
η
ω
Pole-zero frequency computations
qiqfH pi
/1)12( )110( −= −ηωω’
1)1/(10
)1/(
1
*2
1
1
−∏ +
∏ +=
=
−
−
=−
i
jpiHzi
qi
i
jjziHziHzizi
zi
K
ωω
ωωωω
η
ω qqifHzi
/12 )110( −= ηωω’
www.nasa.gov 10

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
-- Example fit using equations with certain atmospheric parameters:
10
15
l, dB
(m/s
ec/H
z)
Von Karman
TF fit
-5
0
5
wav
e ve
loci
ty s
pect
ral
-15
-10
5
long
itudi
nal a
cous
tic w
10-2
10-1
100
101
102
frequency, Hz
www.nasa.gov 11

National Aeronautics and Space AdministrationAtmospheric Turbulence – Fractional Order Model
DevelopmentE l fit i th E / dj t t
20
30
40
ral,
dB((m
/sec
/Hz)
c/H
z)
von Karman
-- Example fits using these Eqs. w/ adjustments:
0
10
oust
ic w
ave
velo
city
spe
ctr
von Karman, eddy dissap.=5e-4TF fit, eddy dissap.=5e-4von Karman eddy dissap =8 5e-5
5
10
15
loci
ty s
pect
ral,
dB(m
/sec TF fit
10-2 10-1 100 101 102
-10
frequency, Hz
aco
von Karman, eddy dissap. 8.5e 5TF fit, eddy dissap.=8.5e-5
40)15
-10
-5
0
tudi
nal a
cous
tic w
ave
ve
10
20
30ity
spe
ctra
l, dB
((m/s
ec/H
z10-2 10-1 100 101 102
-15
frequency, Hz
long
it
Longitudinal Acoustic wave velocity spectral
-10
0
10
acou
stic
wav
e ve
loci
von Karman, integral scale length=1500mTF fit, integral scale length=1500mvon Karman, integral scale length=762mTF fit, integral scale length=762m
www.nasa.gov 12
Acoustic wave velocity spectral due to temperature gust and its TF fits10-2 10-1 100 101 102
frequency, Hz

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
-- TF fits with L=765, ε=8.6e-5):(complete equation set takes into account these adjustments)
)11.1593/)(17.85/)(11.30/)(146.1/()15.335/)(10.55/)(12.9/(74.8)(
+++++++
=ssss
ssssGLALongitudinal Acoustic Wave Velocity (m/sec)
)13.816/)(18.109/)(11.25/)(11.1/()14.602/)(16.45/)(10.33/(75.41)(++++
+++=
ssssssssGT Temperature (K)
)13.816/)(18.109/)(11.25/)(11.1/()14.602/)(16.45/)(10.33/(88.20)(++++
+++=
sssssss
aRMsG
oTA
γAcoustic Wave due to Temperature (m/sec)
)13.816/)(18.109/)(11.25/)(11.1/()14.602/)(16.45/)(10.33/(96.37)(++++
+++=
ssssssssGP Pressure (Pa)
www.nasa.gov 13

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
-- Simulating atmospheric Disturbances:a) Construct a time domain unit amplitude sinusoids distributed in frequencyb) Use this time domain sinusoids as input to atmospheric disturbance TFs b) Use this time domain sinusoids as input to atmospheric disturbance TFs
8
12
tinal vel d
ist,
m/sec
40
dist
urba
nce,
o K
Atmospheric DistPres.
0 0.5 1 1.5 2 2.5
0
4
atm
osph
eric lo
ngitu
t
time sec0 0.5 1 1.5 2 2.5
0
20
atm
osph
eric te
mp.
ti
GP(s)
GT(s)
Dist Freqes.
Temp.
Vel. Due
40
60
80
p long
it ve
l dist, m
/sec
20
30
40
sure
distu
rban
ce, P
a
time, sec time, sec GTA(s)
GLA(s)
to Temp.
Vel.
0 0.5 1 1.5 2 2.50
20
atm
osph
eric te
mp
time, sec0 0.5 1 1.5 2 2.5
0
10
atm
osph
eric p
res
time, sec
www.nasa.gov 14
Atmospheric Disturbances w/ frequencies from sub Hz to 200 Hz, w/ ε=8.6e-5, L=765 m (11km turbulence patch)

National Aeronautics and Space Administration
Atmospheric Turbulence – Fractional Order Model Developmentp
-- Atmospheric wind gust turbulence considering: -- Vehicle Mach=2.35 -- Smallest eddy dissipation scales of 25m (from literature)Smallest eddy dissipation scales of 25m (from literature)-- ~180 mph top wind speeds-- Eddy dissipation rate
R lt i l t f i t 30 H-- Results in cluster frequencies up to 30 Hz
100 150
Moderate to Severe Turbulence (ε=1.7e-3)Light to Moderate Turbulence (ε=8.6e-5)
0
50
d gu
st, m
/sec
50
100
150
g gu
st, m
/sec
-100
-50
atm
osph
eric
win
d
-100
-50
0
atm
osph
eric
win
g
www.nasa.gov 15
0 1 2 3 4 5-150
time, sec0 1 2 3 4 5
-150
time, sec
a

National Aeronautics and Space Administration
Future Work
C ith id ti f t h i di t b ifi ti f hi h d-- Come up with considerations for atmospheric disturbance specifications for high speed vehicles
-- Integrated Propulsion system studies utilizing atmospheric disturbancesg p y g p
-- Integrated Vehicle (Aero-Propulso-Servo-Elastic) studies utilizing atmospheric and other disturbances
Publications:
1. Kopasakis, “Atmospheric Turbulence Modeling for Aero Vehicles – Fractional Order Fits,” NASA TM, in f bli hiprocess of publishing.
2. Kopasakis, “Modeling of Atmospheric Turbulence as Disturbances for Control Design and Evaluation of High Speed Propulsion Systems,” ASME TurboExpo 2010 to be published
www.nasa.gov 16

National Aeronautics and Space Administration
Shock Positioning Controls Design for a Supersonics Inlet
Outline
BackgroundBackground
Controls Design Approach
Inlet Shock Positioning Controls Design
-- Plant Transfer Functions
-- Atmospheric Disturbances
-- Controls Design
-- Results
www.nasa.gov 17
Concluding Remarks

National Aeronautics and Space Administration
Shock Positioning Controls Design for a Supersonics InletBackgroundac g ou d
Supersonic Axisymmetric Inlet- Mixed-compression- Single flow path
T l ti / ll i t b d
terminal shock
Throat
- Translating / collapsing centerbody
Internal SubsonicEngine Face
ExternalSupersonic
Compression
Supersonic Diffuser
Subsonic Diffuser
Terminal Shock PositionLow Performance
Engine Center Linep
Normal PerformanceHigh Performance
www.nasa.gov
18

National Aeronautics and Space Administration
Feedback Controls Loop Shaping Design Approach
Motivation:• Tie controls design to hardware capabilities.
M i i f• Maximize performance-- Better command tracking-- Enabling reduction of design margins to improve propulsion efficiency.
Features of Approach:• Using control system requirements and actuator speed(s) to shape the
feedback controller Closed Loop Gain (CLG)feedback controller Closed Loop Gain (CLG)
• Methodical design w/ quantifiable performance-- Emphasizes how to trade competing requirements p p g q-- Maximize performance (command tracking, disturbance rejection,
stability-- Guaranteed stability by avoiding plant inversion
www.nasa.gov 19
Kopasakis, “Feedback Control Systems Loop Shaping Design with Practical Considerations,” NASA/TM-2007-215007

National Aeronautics and Space Administration
Feedback Controls Loop Shaping Design Approach
St S l t CLG b d idthmrlrco /raC=ω
Step a. – Select CLG bandwidth,
St b D i d i d CLG f ifi ti
)11000/)(1100/()125/(13.353)(
+++
=sss
ssL
Step b. – Design desired CLG for specifications(stability, disturbance rejection, etc.)
Feedback Control System Diagram.
)()( sLsC )()( sGsC d )11000/)(1100/( ++ sss)(1
)()()(
sLsR +=
)(1)(
)()(
sLsDd
+=,
www.nasa.gov 20
Example of Closed Loop Gain (CLG) Design Step Response

National Aeronautics and Space Administration
Feedback Controls Loop Shaping Design Approach
Step c. – Calculate control TF and plot
)(log20)(log20)( 1010 sGsLsG PC −=
))(())(())(( sGsLsG PC φφφ −=
)1/2/) (1/( 22K
Step d. – Fit control TF w/ poles and zeros
)1/2/)......(1/()1/2/)....(1/(
)( 221
221
+++
+++=
pnpnp
znznzC wsss
wssKsG
ωςωωςω
www.nasa.gov 21

National Aeronautics and Space Administration
Inlet Shock Position Controls Design
-- Control the opening of bypass doors to position the shock against disturbances(atmospheric turbulence, aeroservoelastic, pitch, yaw, and engine)
Atmospheric Dist
+
GPS(s)
Inlet Dist TFsGP(s)
GT(s)
Atmospheric Dist
Dist Freq pressure
temperature
KcrcowlRad
+
Σ+
GTS(s)
GMS(s)1/ao
Vel to Mach
Σ+GTA(s)
GLA(s)
+Vel. Due to Temp
Velocity
GC(s) GBS(s)GA(s)Σ Σ1/Kcr Σ
C
1/cowlRad +
++
++
-
Shock posref pos
Shock Dist
CCmnd Sch
Shock Position Feedback Control Diagram
www.nasa.gov 22

National Aeronautics and Space Administration
Inlet Shock Position Controls-- Plant TFs:-- Plant TFs:
Bypass door to shock position (Using Large Perturbation Inlet (LAPIN) simulation
*)12513/)(1653/(325.3
)(++ ssK
G cr
)13707/3.13707/)(13519/3.13519/(1
*)13330/3.13330/)(13142/1.13142/)(1911/5.1911/)(1118/(
))(()(
2222
222222
++++
+++++++=
ssss
ssssssssG cr
BS
0
20
de (d
B)
Bypass Door to Shock Position TF
0-60
-40
-20
Mag
nitu
720
-540
-360
-180
Pha
se (d
eg)
www.nasa.gov 23
100
101
102
103
-720
Frequency (Hz)

National Aeronautics and Space Administration
out1in1 out2
-- Plant TFs: Valve actuator to bypass door position
in1 out21
Out1
1/(2*pi*250)s+1
1/(2*pi*3500)s+1Transfer Fcn4
1/(2*pi*10)s+1
1/(2*pi*20)s+1Transfer Fcn3
1
s
Transfer Fcn2
1
A.s
Transfer Fcn1
1/Kf
1/Wn^2s +2*Z/Wns+12
Transfer Fcn
10.3
K1
K3
Gain3
K2
Gain2
1In1
2
Valve Actuator Feedback Control Diagram
Kw
Gain4
)14753/6.04753/)(11136/8.01136/)(160/()163/(
)(2222 +++++
+=
ssssss
sGA
0Valve Actuator TF
-50
-40
-30
-20
-10
Mag
nitu
de (d
B)
360
-270
-180
-90
0
Pha
se (d
eg)
www.nasa.gov 24
100
101
102
103
-360
Frequency (Hz)

National Aeronautics and Space Administration
Inlet Disturbance Transfer FunctionsF t di t b t h k P itiFreestream disturbances to shock PositionUsing Large Perturbation Inlet (LAPIN) simulation
Free Stream TFs
Engine Face
Disturbance
ShockPosition
TFs
1786.61562.81366.11078.1707.1309.31475.81416.21019.8737.5408.255.1)(
23456
2345
esesesesesesesesesesessGPS
++++++
−+−+−=
Pressure:
20
0
20
de (d
B)
g
2443226219941602136910463113832226.62093.21712.11420.21128.1769.5478.189.4)(
2345678
234567 esesesesesesessGTS−−+−+−+−
=
Temperature:-60
-40
-20
Mag
nitu
d
720
Mach No. TF
2447.32265.21997.41602.71369.51046.3751.1387.3 2345678 esesesesesesesesS
++++++++
Mach Number:0
180
360
540
Pha
se (d
eg)
www.nasa.gov 25
2121.11931.11623.21388.31016.2742.1312.32169.41952.11669.21301.1916.9624.3288.4)(
234567
23456
esesesesesesesesesesesesesesGMS
+++++++
+++−+−= 100 101 102 103 104 105
-180
Frequency (rad/sec)

National Aeronautics and Space Administration
Atmospheric Turbulence“Atmospheric Turbulence Modeling for Aero Vehicles – Fractional Order Fits,”
NASA/TM submitted for publication, George KopasakisApproach:Taking an existing atmospheric wind gust model, also scaling it for temperature and pressure and deriving whole order TF’s to fit the fractional order disturbances (for ε=8 6e-5 L=765)and deriving whole order TF s to fit the fractional order disturbances (for ε 8.6e 5, L 765)
Longitudinal acoustic velocity (m/sec):)15.335/)(10.55/)(12.9/(74.8)( +++
=ssssGLA 20
30
40
tral,
dB((m
/sec
/Hz)
Temperature (oK):
)11.1593/)(17.85/)(11.30/)(146.1/()(
++++ sssssGLA
)14.602/)(16.45/)(10.33/(75.41)( +++ sssG-10
0
10
acou
stic
wav
e ve
loci
ty s
pect
von Karman, integral scale length=1500mTF fit, integral scale length=1500mvon Karman, integral scale length=762mTF fit i t l l l th 762
Acoustic Velocity due to Temperature (m/sec):
)13.816/)(18.109/)(11.25/)(11.1/())()(()(++++
=ssss
sGT
)14602/)(1645/)(1033/(8820 +++RM
10-2 10-1 100 101 102
frequency, Hz
TF fit, integral scale length=762m
30
40
(m/s
ec/H
z)
Pressure (Pa):
)13.816/)(18.109/)(11.25/)(11.1/()14.602/)(16.45/)(10.33/(88.20)(++++
+++=
sssssss
aRMsG
oTA
γ
0
10
20
ic w
ave
velo
city
spe
ctra
l, dB
((
von Karman, eddy dissap.=5e-4TF fit eddy dissap =5e 4
www.nasa.gov 26
)13.816/)(18.109/)(11.25/)(11.1/()14.602/)(16.45/)(10.33/(96.37)(++++
+++=
ssssssssGP
10-2 10-1 100 101 102
-10
frequency, Hz
acou
sti
TF fit, eddy dissap.=5e-4von Karman, eddy dissap.=8.5e-5TF fit, eddy dissap.=8.5e-5

National Aeronautics and Space Administration
Inlet Shock Position Controls Design ProcessM lti L C t l D i A hMulti-Loop Controls Design Approach:
1. For Max. Disturbance Attenuation, starting with a high shock controller bandwidth (145 Hz –vs.- 175 Hz bandwidth of the actuator loop)
Shock Dist
GC(s) GBS(s)GA(s)Σ Σ1/Kcr Σ+
+++
+
-
Shock posref posout1in1 out21
Out1
1/(2*pi*250)s+1
1/(2*pi*3500)s+1Transfer Fcn4
1/(2*pi*10)s+1
1/(2*pi*20)s+1Transfer Fcn3
1
s
Transfer Fcn2
1
A.s
Transfer Fcn1
1/Kf
1/Wn^2s +2*Z/Wns+12
Transfer Fcn
10.3
K1
Kw
Gain4
K3
Gain3
K2
Gain2
1In1 2
GA(s)
2. Design shock CLG (steps a-d) to maximize disturbance attenuation w/ sufficient stability margins (20 db mid-frequency disturbance atten.,
).deg60>Mφ )
3. Lower proportional controller gain until control loops are sufficiently decoupled (bandwidth will proportionally decrease as well)
.deg60>Mφ
4. Repeat Step 2. w/ new shock controller bandwidth
5. If this doesn’t meet design objectives (command tracking, margin reduction, etc) what’s left is to ask for more hardware capability
www.nasa.gov 27
, ) p y
Kopasakis et al. – Shock Positioning Controls Design for a Supersonic Inlet, AIAA-2009-5117

National Aeronautics and Space Administration
Inlet Shock Position Controls Design Process60
g
)1)52/(( +πs
2. Designed shock controller closed loop gain (CLG):
0
20
40
Mag
nitu
de (d
B)
)1)5.142/(()1)52/((310)(
++
=ππ
ssssL
-20
-70
-60
se (d
eg)
)()()()( sGsGsGsL BSAC=
10-1 100 101 102 103-90
-80
Pha
s
Frequency (Hz)
)()(log20)(log20)( 1010 sGsGsLsG BSAC −=
))()(())(())(( sGsGsLsG BSAC φφφ −=
www.nasa.gov 28

National Aeronautics and Space Administration
Inlet Shock Position Controls Design Process
)155002/4.1)55002/()(150002/4.1)50002/()(11042/)(15.142/()12502/3.1)2502/()(11452/98.0)1452/()(18.182/)(152/(310
)(2222
2222
++++++
++++++=
ππππππππππππ
sssssssssssss
sGC
Shock Controller from pole/zero TF fit:
)175002/41)75002/()(170002/41)70002/(()16502/60.0)6502/()(15502/0.1)5502/((
)165002/4.1)65002/()(160002/4.1)60002/(()14502/0.1)4502/()(13502/36.1)3502/((
2222
2222
2222
2222
++++
++++
++++
ππππ
ππππππππ
ssss
ssssssss
)175002/4.1)75002/()(170002/4.1)70002/(( 2222 ++++ ππππ ssss
40
50designed loop gaindesired loop gain
Verify CLG designStep Response
4.8
-10
0
10
20
30
Mag
nitu
de (d
B) desired loop gain
4
4.2
4.4
4.6
4.8
ositi
on, i
nc
-90
-60
Pha
se (d
eg)
10
3
3.2
3.4
3.6
3.8
shoc
k po
www.nasa.gov 29
Frequency (Hz)10-1 100 101 102
-120 0.3 0.35 0.4 0.45 0.5time, sec

National Aeronautics and Space Administration
Inlet Shock Position Controls Design Process
3. Lower controller proportional gain until control loops are decoupled
-- Sufficient decoupling when proportional gain lower to 100 from 310
-- Mid-frequency disturbance attenuation will drop to ~10 dB
-- Shock position control bandwidth falls to 35 Hz
4.6
Step Responses w/ gain of 100
4.6
4.8
Gain of 310 Gain of 100
3.8
4.2
ock
posi
tion,
in3 6
3.8
4
4.2
4.4
k po
sitio
n, in
c
0.3 0.35 0.4 0.45 0.5
3
3.4sho
0 3 0 35 0 4 0 45 0 5
3
3.2
3.4
3.6
shoc
www.nasa.gov 30
time, sec
-- Check shock control system performance with reduced gain0.3 0.35 0.4 0.45 0.5
time, sec

National Aeronautics and Space Administration
Atmospheric Turbulence
Worst case turbulence at over 20k feet altitude-- combined longitudinal acoustic velocity gust w/ temperature fluctuation (temp + acoustic velocity due to temp), w/ pressure fluctuationfluctuation
8
12
nal v
el dist, m/sec
40
distur
banc
e, o K
0
4
atmos
pher
ic lo
ngitu
tin
20
atmos
pher
ic te
mp. d
60
80
el dist, m/sec
30
40
urba
nce, P
a
0 0.5 1 1.5 2 2.5time, sec
0 0.5 1 1.5 2 2.50
time, sec
20
40
osph
eric te
mp long
it ve
l
10
20
mos
pher
ic pre
sure
distur
www.nasa.gov 31
0 0.5 1 1.5 2 2.50
atmos
time, sec0 0.5 1 1.5 2 2.5
0
atmo
time, sec

National Aeronautics and Space Administration
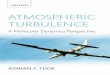
Shock Control System Command Tracking PerformanceC t l t ithi b d-- Control parameters within bounds
-- Shock position tracking within approx. 0.15 in
www.nasa.gov 32

National Aeronautics and Space Administration
Shock Control System Command Tracking Performance
Check Mid-frequency disturbance attenuation
Applying 10 HZ disturbance at the shock position
0.5
1
ce,in
4.2
4.25
,in
0
hock
dis
turb
anc
4.1
4.15
shoc
k po
sitio
n0 0.2 0.4 0.6 0.8 1
-1
-0.5sh
ti0.2 0.4 0.6 0.8 1
4.05
titime, sec time, sec
-- Mid Frequency attenuation of ~ 20 dB instead of 10 db due to lower gain(aided by the actuator control loop)
www.nasa.gov 33
(aided by the actuator control loop)

National Aeronautics and Space Administration
Integrated Linear Propulsion System ModelI t t d li l i t-- Integrated linear propulsion system
model developed
51015
20
urba
nce,
N
Upstream Flow Field DisturbancesDist TF's
time
time speed to mdot
num(s)
den(s)
mdot to shock
Switch2
-21.6
Shock Ref1
Scope81
Gain2
Display
8.158
CowlRadius
Cl k2
Add1 -10-50
5
Thru
st D
istu
num(s)
den(s)
-K-cowlRadius (in)
12000
Scope6
Scope2
Pos Dist1
In1
In2
Out1
FreeStream Dist
0
Constant1
Clock2
-20-15
5 5.4 5.8 6.2 6.6Time, sec
pres (pa) 1
thrust_cl
thrust
In1
In2
Out2
i f l t d
In2
Out1
Temp&Pres2Speednum(s)
den(s)
Speed to Thrust
Speed Ref
4.13
Shock Ref
Scope7
Scope4
Scope3
Scope1
In3
In1
In2
Out1
Inlet Bypass to shock 1 Add5-K-
1/cowlRadius1pres (pa)
deltaPres_2engine
DeltaTemp_2engine
1
DeltaTrustengine fuel to speed
Controller -63440.25
TrustOffset
In3Switch1
In1
In2
Out1
Out2
Shock Ref
Scope9Scope5
Inlet Bypass to shockcontroller
Gain1
0
Constant2
www.nasa.gov 34
Shock2Temp&Pres

National Aeronautics and Space Administration
Conclusion
Shock controls design approach developed to maximize command tracking performance in the presence of disturbance
More work needed to include other disturbance, like pitch, yaw, and aeroservoelasticae ose oe ast c
Additional work needed to study integrated propulsion and aeropropulsoservoelastic effectsaeropropulsoservoelastic effects
So far results are encouraging; g gIf tight shock position control can be maintained, reduction in shock control margin and significant propulsion efficiency gains can be realized as well as reduction in thrust transients
www.nasa.gov 35