Embed Size (px)
Citation preview

Milani et al.: Asteroid Close Approaches 55
55
Asteroid Close Approaches:Analysis and Potential Impact Detection
Andrea MilaniUniversità di Pisa
Steven R. ChesleyJet Propulsion Laboratory
Paul W. ChodasJet Propulsion Laboratory
Giovanni B. ValsecchiIstituto di Astrofisica Spaziale
Recently, several new tools and techniques have been developed to allow for robust detec-tion and prediction of planetary encounters and potential impacts by near-Earth asteroids (NEAs).We review the recent history of impact-prediction theory and cover the classical linear tech-niques for analyzing encounters, which consists of precise orbit determination and propagationfollowed by target-plane analysis. When the linear approximation is unreliable, there are varioussuitable approaches for detecting and analyzing very low-probability encounters dominated bystrongly nonlinear dynamics. We also describe an analytic approach that can provide valuableinsight into the mechanisms responsible for most encounters. This theory is the foundation ofimpact monitoring systems, including those currently operational and those being developed.
1. INTRODUCTION
The last 10 years have seen tremendous progress in ourability to assess the risk of an asteroid or comet collidingwith Earth. The catalyst for much of the increased interestin these near-Earth objects (NEOs) was a request by theU.S. Congress in 1990 that NASA undertake two workshopstudies, one to study ways of increasing the discovery rateof these objects and another to study the technologies andoptions for deflecting or destroying an NEO should it befound to pose a danger to life on Earth. The report fromthe first of these workshops proposed an international NEOsurvey program called Spaceguard, borrowing the namefrom a similar project in Arthur C. Clarke’s science fictionnovel Rendezvous with Rama (Morrison, 1992). The reportnoted the need for development of new procedures andsoftware to “assess the uncertainty [in Earth-object distance]for any future close approaches.”
The exploding state of knowledge of the impact hazardproblem in the early 1990s was well captured by an earliermonograph in this series, Hazards Due to Comets and As-teroids (Gehrels et al., 1994). In that volume, Bowell andMuinonen (1994) suggest the use of the minimum orbitalintersection distance (MOID) for close encounter analyses,and define the class of potentially hazardous asteroids(PHAs) as those asteroids having a MOID with respect toEarth of <0.05 AU. In the same volume, Chodas and Yeo-mans (1994) describe a system for predicting future aster-
oid and comet close approaches, including the computationof close-approach uncertainties and impact probabilities vialinear methods. The impact probability computation vialinear methods in the impact plane was introduced in thecontext of asteroid and comet collisions by Chodas (1993).The method saw an immediate application when CometShoemaker-Levy 9 was found to be on a collision coursewith Jupiter. Within a few days of the impact announce-ment, the impact probability was calculated to be 64% (Yeo-mans and Chodas, 1993), and it reached 95% only a weeklater. Somewhat different linear methods for computing col-lision probabilities by monitoring the distance betweenEarth and the asteroid uncertainty ellipsoid are described byMuinonen and Bowell (1993). Chodas and Yeomans (1996)performed an early nonlinear analysis of orbital uncertain-ties in an investigation of the prebreakup orbital history ofComet Shoemaker-Levy 9.
In March 1998, the problem of computing impact prob-abilities received a great amount of press attention becauseof a prediction by Brian Marsden of the Smithsonian Astro-physical Observatory that the sizable asteroid 1997 XF11would make an extremely close approach to Earth in 2028,coupled with a widely misunderstood statement that a col-lision was “not entirely out of the question” (Marsden,1999). A linear analysis of the impact probability was im-mediately performed by Paul W. Chodas and Donald K.Yeomans of the Jet Propulsion Laboratory (JPL), and thechance of collision in 2028 was found to be essentially zero.

56 Asteroids III
When prediscovery observations from 1990 were found thenext day and included in the orbital solution, they onlyserved to confirm that there was no possibility of collision in2028 (Chodas and Yeomans, 1999b; Muinonen, 1999).
Three months after the 1997 XF11 story hit the news,Marsden opened a new area of investigation by suggestingthat prior to the discovery of the 1990 observations, 1997XF11 had in fact a small possibility of collision in the de-cade or so after 2028 because the deep close approach in2028 could alter the asteroid’s orbital period to bring it backto Earth several orbits later. Linear methods were inadequateto analyze these later collision possibilities because the2028 close approach introduced a strong nonlinearity into1997 XF11’s predicted motion. Primarily to investigate thepost-2028 impact scenarios of 1997 XF11, two groups in-dependently and simultaneously developed new nonlinearmethods for analysis of collision possibilities much furtherinto the future than had been possible with the linear meth-ods. Chodas and Yeomans (1999a) applied a Monte Carlotechnique to sample the linear six-dimensional confidenceregion at the epoch of observation and then numericallyintegrate over the timespan of interest using the nonlinearequations. Milani et al. (1999, 2000b) applied the multiple-solutions approach to sample the central line of variations ofthe nonlinear confidence region at epoch and then numeri-cally integrate over the timespan of interest in a similarfashion. The two methods yielded very similar results whenapplied to the hypothetical 1997 XF11 case without the pre-discovery observations, with each obtaining an impact prob-ability on the order of 10–5 for the year 2040 (Chodas andYeomans, 1999c; Milani et al., 2000b).
In early 1999, Milani et al. applied these same tech-niques to the case of asteroid 1999 AN10 while developingthe theory of resonant and nonresonant returns. They alsoidentified for the first time an impacting solution consistentwith a complete set of NEA observations, although the colli-sion probability was very small (Milani et al., 1999). Thisresult was confirmed by independent investigators. As moreobservations of 1999 AN10 became available, both the Pisaand the JPL group identified two much more likely impact-ing scenarios for the years 2044 and 2046, with probabilitieson the order of 10–6, the highest seen to that date. Obser-vations later found on archival plates drove these probabili-ties to essentially zero.
In mid-1999, a second asteroid, 1998 OX4, was deter-mined (based on all available observations) to have somecollision potential (Milani et al., 2000a). Unfortunately thisasteroid had become lost, because of its faintness and itslocation in the Milky Way, despite concerted efforts ofnumerous observers around the time of discovery, and therewas no practical way to obtain additional observations torefine the collision hazard posed by this object. Milani etal. (2000a) proposed a method, based on the concept of anegative observation, for ruling out the known collisionpossibilities without requiring the recovery of 1998 OX4;their approach has been successfully implemented (AndreaBoattini, personal communication, 2001). In their reassess-ment of the case, Muinonen et al. (2001) found additional
possibilities of collision, generally confirming the resultsof Milani et al. (2000a). However, this case highlighted theneed for automatic collision monitoring, since it is highlylikely that, had the collision potential been recognized atthe time of the discovery, the resources needed to observethe newly discovered PHA and refine its orbit would havebeen forthcoming. In response, the CLOMON monitoringsystem (Chesley and Milani, 2000) was developed at theUniversity of Pisa, and it has been used to detect numerousimpact possibilities among recently discovered asteroids.Importantly, all these threatening events (apart from someinvolving very small bodies) were eventually eliminated as aresult of additional observations, which in some cases cameas a direct result of CLOMON impact detection. CLOMONwas, however, a prototype system with an uncertain levelof completeness. At the time of this writing, more advancedmonitoring systems, based on principles described in thischapter, are under independent development at the Univer-sity of Pisa and at JPL.
This chapter is organized to give an overview of the ideasand theories needed to reliably detect and analyze poten-tially threatening Earth-asteroid encounters. The next sec-tion describes the most important tool used in encounteranalysis, the target plane. In section 3, we describe the lineartheory of orbit determination and encounter analysis andalso discuss the limitations of the theory. In sections 4 and5 we describe the various nonlinear sampling and analysismethods available. Section 6 presents an analytic approachthat can be used to understand the chaotic nature of theproblem in terms of resonant returns and keyholes. Finally,section 7 discusses a few of the more significant open prob-lems that remain.
2. PLANETARY ENCOUNTERS
2.1. Target Planes
The primary method of studying planetary encounters,whether the encounters are with spacecraft or minor planets,continues to rely on the concept of a target plane. Here weuse this term generically to encompass any of the variousplanes and coordinate systems that may be used to study aspecific encounter of an asteroid with Earth. (For simplic-ity we limit this development to asteroid encounters withEarth. The extension to comet encounters, where nongravi-tational forces must be considered, or to encounters withother planets is straightforward.) In this sense, a target planeis simply a geocentric plane oriented normal to the aster-oid’s geocentric velocity vector. The point of intersection ofthe asteroid trajectory with the target plane provides con-siderable insight into the nature of an encounter, especiallywhen uncertainty is carefully taken into account.
While the fundamental concept is rather straightforward,there are several issues we must address that can unfor-tunately obscure this simplicity. In general, either of twodistinct planes and several coordinate systems can be used.The two available target planes pass under various namesthrough the published literature, which is occasionally con-

Milani et al.: Asteroid Close Approaches 57
fusing, but for the purposes of this development we set forththe following usage:
Target plane or b-plane. The b-plane is the classical targetplane that has been used in astrodynamics since the 1960s(e.g., Kizner, 1959) and by Greenberg et al. (1988) in theframework of Öpik’s theory of close encounters (Öpik, 1976).It is oriented normal to the incoming asymptote of the oscu-lating geocentric hyperbola, or, equivalently, it is orientednormal to the unperturbed relative velocity v∞. The b-planeis named in reference to the so-called impact parameter b,which is the distance from the geocenter to the intercept ofthe asymptote on this plane, i.e., the minimum encounterdistance along the unperturbed trajectory.
Modified target plane (MTP). The MTP is modified inthe sense that it is oriented normal to the geocentric veloc-ity at the point of closest approach along the actual trajec-tory. Rather than noting the position of the intersection ofthe unperturbed orbit, as is done with the b-plane, we markthe intersection of the perturbed asteroid trajectory with thetarget plane when using the MTP. The term “MTP” was in-troduced by Milani and Valsecchi (1999), although the con-cept was introduced earlier (e.g., Chodas and Yeomans, 1994).
The main difference between the two types of targetplanes arises from the fact that the deflection of the aster-oid by the planet or gravitational focusing is directly indi-cated with the use of the MTP, while the gravitationalfocusing is in some sense hidden when the b-plane is used.For encounters taking place at high relative velocities, orat large distances, the deflection will be very small and thedistinction between the two planes becomes negligible.
One difficulty that arises from the visibility of gravita-tional focusing on the MTP is that nearby trajectories aredeflected by different amounts. When the deflection is sig-nificant, as is typically the case for very deep encountersor those with low relative velocities, this leads to substantialnonlinearity in the mapping from the asteroid’s preencoun-ter state onto the impact plane. Moreover, the orientationof the plane itself can change significantly with modestchanges to the asteroid’s trajectory, and this poses anotherimportant source of nonlinearity. Of course, for very slowencounters that lead to temporary capture of the asteroid,an asymptote does not exist, and therefore the b-plane ap-proach fails; in such cases the MTP must be used.
This allows us to rate the utility of the b-plane and MTPaccording to the deflection caused by the encounter. Forvery low deflections, the two approaches are essentiallyindistinguishable, while for moderate deflections the pre-ferred plane depends on the circumstances and purposes athand. For relatively large deflections, the greater nonline-arity of the MTP causes the b-plane to be generally superior,but for very low relative velocities (leading to capture inelliptical orbits) only the MTP is available.
2.2. Target Plane Coordinates
Conventionally, the coordinate origin is at the geocenter,but the orientation of the coordinate system on the targetplane is arbitrary. The reference system has been variously
fixed by aligning the axes so that one of the nominal targetplane coordinates is zero (i.e., the asteroid is placed on anaxis) or by aligning a coordinate axis with either the pro-jection of Earth’s polar axis (e.g., Figs. 1 and 2) or the pro-jection of Earth’s heliocentric velocity (e.g., Fig. 3).
One of the most important objectives in a target-planeanalysis is to determine whether a collision is possible and,if not, to decide how deep the encounter will be. Whenusing the MTP we plot the position of the asteroid at thepoint of closest approach; hence this information is imme-diately available. On the other hand, with the b-plane weobtain the minimum distance of the unperturbed trajectoryat its closest approach point, which is the impact param-eter b. The impact parameter alone does not reveal whetherthe perturbed trajectory will intersect the figure of Earth,but this information can be extracted by scaling Earth’sradius r according to
b rvv
e
∞= +1
2
2
where ve is Earth’s escape velocity
vGM
re2
2=
With this we can say that a given trajectory impacts if b <b , and not otherwise. An alternative to simply scaling thefigure of Earth on the b-plane is to scale b while leavingthe figure of Earth at r . For any single orbit this is obvi-ously equivalent, but when computing the coordinates ofslightly different asteroids, each with a slightly different v∞,the scaling is not uniform (Chodas and Yeomans, 1999c).
A convenient target-plane reference system (ξ, η, ζ) isobtained by aligning the negative ζ-axis with the projec-tion of Earth’s heliocentric velocity v , the positive η-axiswith the geocentric velocity (i.e., normal to the b-plane),and the positive ξ-axis in such a way that the referencesystem is positively oriented. With this frame of reference,the target-plane coordinates (ξ, ζ) indicate the cross-trackand along-track miss distances, respectively. In other words,ζ is the distance by which the asteroid is early or late forthe minimum possible distance encounter. The associatedearly/late timing of the target-plane crossing (η = 0) is ∆t =ζ/(v sin θ), where θ is the angle between v∞ and v . Onthe b-plane the ξ coordinate is the minimum distance thatcan be obtained by varying the timing of the encounter. Thisdistance, known as the minimum orbital intersection dis-tance (MOID), is equivalent to the minimum separation be-tween the osculating ellipses, without regard to the locationof the objects on their orbits. We note that this interpretationof the target-plane coordinates is valid only in the linearapproximation and can break down for distant encounters(e.g., beyond several lunar distances).
Whatever target plane or coordinate frame is used, theidea that an asteroid can avoid an impact, either throughbeing off time or by having an orbit that does not even inter-sect Earth, is important. To have an impact the object must

58 Asteroids III
have a small enough MOID and be on time for the colli-sion. With this in mind, we can characterize an encounterquite well given only the MOID and ∆t. The MOID, whichis strictly a function of the osculating elements of the as-teroid and Earth, can be computed in various ways, withthe numerical approach of Sitarski (1968) being the mostwidely used. A recently developed semianalytic approach(Gronchi, 2001) can be more robust, with better handlingof the cases of multiple local minima of the distance be-tween the two orbits (so-called local MOIDs).
3. LINEAR ENCOUNTER THEORY
3.1. Least-Squares Orbit Determination
The details of the orbit determination process are notwithin the scope of this presentation; readers should con-sult Bowell et al. (2002). However, we do need to touchon a few of the key ideas of estimation theory to establishour notation and terminology. First, we describe the initialconditions at some epoch t0 for the asteroid under consid-eration as the six-dimensional vector X of orbital elements.The observation residuals ρ = ρ(X) are a function of thesix orbital elements, and they form an m-dimensional vec-tor where m > 6 is the number of (scalar) observations.
The weighted least-squares method of orbit determina-tion seeks to minimize the weighted RMS of the residualsρ, so we define the cost function as
Qm
WT= 1 ρ ρ
where W is a square, symmetric (though not necessarilydiagonal) matrix that should reflect the a priori RMS andcorrelations of the observation errors. We denote the depen-dence of the residuals on the elements by
BX
= ∂∂
ρ(X)
where B is an m × 6 matrix. Then we can compute the de-rivative of the cost function as
ρ∂∂
=Q
X mW B
2 T
The stationary points of the cost function Q are solutionsof the system of nonlinear equations ∂Q/∂X = 0, which areusually solved by some iterative procedure. The most popu-lar is a variant of Newton’s method, known in this contextas differential corrections, with each iteration making thecorrection X – ∆X → X, where
∆X = (BT W B)–1 BT W ρ
This converges (normally) to the best-fitting or nominal
solution X*, where ∆X = 0. We use the usual terminologyfor the normal matrix CX = BTWB, and covariance matrixΓX = CX
–1. We note that these matrixes can be computed notonly for the nominal solution but also for nearby values ofX, a point that will be put to use in sections 4.3 and 5.3 inhandling nonlinear situations.
3.2. Orbital Confidence Region
The expansion of the cost function at a point X = X* +∆X in a neighborhood of X* is
Q X Q Xm
X C X Q X Q XTX( ) ( *) ( *) ( )= + + = +1 ∆ ∆ ∆
where the dots indicate higher-order terms in ∆X plus a termcontaining the second derivative of ρ (see Milani, 1999). Aconfidence region is a region where the solutions are not toofar from the nominal, as measured by the penalty ∆Q. Weshall indicate with ZX(σ) the confidence ellipsoid definedby the inequality
m∆Q(X) = ∆XT CX ∆X ≤ σ2
If the confidence ellipsoid ZX(σ), defined by the normalmatrix CX, is small enough (either because the constraintis sufficiently strong, i.e., the eigenvalues of CX are large,or because the choice of σ is sufficiently small) then thehigher-order terms in ∆Q(X) are also small and ZX(σ) is agood approximation of the region in the space of orbitalelements where the penalty ∆Q < σ2/m. In such cases we saythat the linear theory of estimation holds; however, when theconfidence ellipsoid is larger, it can be an unreliable repre-sentation of the region containing alternative solutions stillcompatible with the observations.
The confidence region is generally viewed as a cloud ofpossible orbits centered on the nominal solution, where den-sity is greatest, and surrounded by a diffuse boundary. Thisis classically represented by the multivariate Gaussian prob-ability density, which reflects the likelihood that a givenvolume of the confidence region will contain the true solu-tion; this Gaussian distribution has X* as the mean and ΓXas the matrix containing the variances and the covariancesof the distributions of the elements (hence its name). Butthe use of the Gaussian probability density to describe or-bital uncertainty assumes that the observational errors areGaussian, and that W accurately reflects the observationaluncertainty. Indeed, the extent of the confidence region isdirectly dependent on the choice of W, and therefore properobservation weighting is crucial for reliably determining theorbital confidence region. However, given the fact that theerror statistics for asteroid astrometry are rarely character-ized, and moreover are often not even Gaussian, it shouldbe clear that the selection of W is very problematic. Thisimplies that a careful probabilistic interpretation of the or-bital confidence region is elusive [see Carpino et al. (2001)for an expanded discussion of this issue].

Milani et al.: Asteroid Close Approaches 59
3.3. Linear Mapping to the Target Plane
Ultimately we wish to use the orbital confidence regionto infer how close an asteroid could pass during a givenclose approach and, if collision is possible, to determine theprobability of collision. To do this we must map the orbitaluncertainty onto the target plane.
The nonlinear function F maps a given orbit X to a pointY on the target plane: Y = F(X). This mapping consists ofa propagation from an epoch near the observations t0 to thetime of the encounter t1, followed by a projection onto thetarget plane. The Jacobian DF linearly maps orbits near thenominal to nearby points on the target plane
∆Y = DF(X*) ∆X
The matrix DF is practically computed by propagating nu-merically the orbit together with the variational equations(providing the state transition matrix), then projecting onthe cross section defined by the target plane. In the linearapproximation — i.e., when the confidence region is smalland F is not too nonlinear — the confidence ellipsoid ZX(σ)in the space of orbital elements maps onto the target planeas an ellipse ZY(σ) defined by
∆YT CY ∆Y ≤ σ2
where CY is the normal matrix describing the uncertaintyon the target plane. As is well known from the theory ofGaussian probability distributions (Jazwinski, 1970), therelationship between the covariance matrices of the vari-ables X and Y can be shown by
CY–1 = ΓY = DF ΓX DFT
3.4. Linear Target Plane Analysis
Continuing under the assumption of linearity, we cancharacterize the target-plane ellipse ZY given only the nomi-nal target-plane coordinates Y, which marks the center ofthe ellipse, and the associated covariance matrix ΓY, whichindicates the size and orientation of the ellipse. The squareroots of the eigenvalues of ΓY are the semimajor and semi-minor axes of ZY, and the corresponding eigenvectors indi-cate the orientation of the associated ellipse axes.
At this point we define several terms and variables asso-ciated with the target-plane analysis that are important forinterpretation. First, d denotes the distance from the aster-oid to the geocenter on the target plane, i.e., d = ||Y|| (onthe b-plane we have d = b). Also, α denotes the angle be-tween Y and the major axis of ZY. The minimum distancefrom the major axis to the geocenter is d sin α. The semi-major and semiminor axes of ZY are termed the stretchingΛ and the semiwidth w, respectively, for reasons that wedescribe immediately.
When an encounter occurs several years or decades inthe future, as is typical for the cases considered to date, the
orbital uncertainty is strongly dominated by uncertainty inthe anomaly. In such cases ZY is very long and slender andthus in the vicinity of Earth the ellipse can often be treatedas a strip of constant width, which allows a convenient inter-pretation of the above parameters. Specifically, under this“strip approximation,” when moving along the major axis,or spine, of ZY we are essentially changing only the anom-aly of the asteroid; thus the minimum distance to the geo-center is the minimum encounter distance possible for anyvariation in the timing of the encounter. But this is preciselythe definition of the MOID, which leads to the result thatd sin α is a good approximation for the MOID in such situa-tions. It follows that the semiwidth w is essentially the un-certainty in the MOID. Furthermore, under the strip approxi-mation, the semimajor axis of ZY will be closely alignedwith the projection of Earth’s heliocentric velocity on thetarget plane; i.e., it is aligned with the ζ-axis, if the refer-ence system on the target plane was chosen in this way. Itslength, which is the stretching Λ, indicates the amount bywhich the original ellipsoid ZX has been stretched by thepropagation F, as well as the timing uncertainty of the en-counter ∆t = Λ/(v sin θ). In some cases, this strip approxi-mation can be inappropriate, generally because either theencounter is close to the time of the observations t0, leadingto a less-eccentric ellipse with errors not dominated by un-certainty in the time of the encounter t1, or because the map-ping F is locally highly nonlinear and interrupted returns(see section 5.4) are present on the target plane. In the for-mer case, a strictly linear analysis of the encounter will typ-ically be suitable, while in the latter case more sophisticatedmethods are needed to detect and analyze the encounter.
To compute the impact probability, one simply integratesthe target-plane probability density pTP over the cross-sec-tional area of Earth (Chodas and Yeomans, 1994). Withinthe Gaussian formalism, the bivariate probability density pTPcan be computed as the product of two univariate probabil-ity densities
pTP(σ1,σ2) = p(σ1)p(σ2)
In fact, the probability density p(σ) is often assumed tobe Gaussian, but can also be modeled as a uniform densityover the interval |σ| ≤ 3, so that p(σ) = 1/6 within this inter-val and zero elsewhere; in the latter case the above formulais an approximation. Note that the value 3 for the limits onσ is somewhat arbitrary and based on experience; a rigorousstatistical limit cannot be computed without going througha rigorous weighting procedure as described in section 3.2and in Carpino et al. (2000). Although the real error distri-bution of asteroid astrometry is clearly not uniform, it hasmuch stronger tails than a Gaussian distribution with for-mally derived standard deviations. In practice, the true prob-ability distribution lies somewhere between the two, andeither distribution will often suffice to obtain an order-of-magnitude estimate of the impact probability.
The recently proposed Palermo Technical Scale can beused to infer the significance of a potential impact event,

60 Asteroids III
based on the impact probability, size of the object, and timeuntil the potential impact (Chesley et al., 2001). However,when the impact probability is very low, say <<10–9, it ispractically indistinguishable from zero; it is therefore rea-sonable to say that an impact is not possible. In a strictlytheoretical sense, if the probability is computed within aGaussian formalism, it is never zero, although the valuescan be meaninglessly small.
3.5. Limitations of Linear Theory
The linear theory described so far has little use whensearching for low-probability impact solutions. It shouldserve as a point of reference for applying the nonlinearapproaches described in the following sections, but it is veryimportant to use this valuable tool in a critical way, beingaware of its limitations.
Nonlinearity arises from each stage in the computationprocedure:
1. The least-squares fit for the elements X at epoch t0 canbe poorly constrained and so the ellipsoid ZX(σ) has somevery long axes and is a poor approximation of the true con-fidence region. This form of nonlinearity is often manifestedby confidence regions that appear as curved ellipsoids, or“bananoids.”
2. The integral flow is nonlinear, and the longer the timeof propagation the more nonlinearity accumulates. Thismeans that even if the confidence ellipsoid were adequateat epoch t0, the linear mapping of the covariance to a muchlater time t1 might be very different from the exact propaga-tion of the orbits in the original confidence ellipsoid, whichwill often appear folded, leading to interrupted returns asdescribed by resonant return theory (sections 5.4 and 6).
3. The projection from the space of elements X onto thetarget plane Y is nonlinear, partly as a result of the trans-formation from orbital elements to Cartesian coordinates.Additionally, we note that for encounters with substantialtiming uncertainty, the target-plane confidence ellipse willhave a very long major axis, and the true confidence re-gion will be actually curved by an amount correspondingto the curvature of Earth’s heliocentric orbit (i.e., the trueconfidence region deviates from the confidence ellipse tothe same extent that Earth’s path deviates from a line). Thisproblem is most severe for encounters with very large tim-ing uncertainty or very low relative velocity.
Besides the more obvious limitation of linear theory, thatthe confidence region is not ellipsoidal, there is also theimportant problem that only the encounters experienced bythe nominal orbit are even detected. And yet it is not un-usual for the asteroid uncertainty to grow to a significantfraction of the entire orbit, or even wrap all the way aroundthe orbit one or more times by the time of a potential col-lision, at which time the nominal orbit may be far fromEarth, even on the opposite side of the Sun, and thus thelinear analysis would not indicate any hazard at that time.Indeed, threatening encounters cannot even be reliablydetected unless the probability of impact rises above ~10–4,
assuming that only encounters of the nominal orbit pass-ing within 0.1 AU are considered.
We know that the curvature of the true confidence re-gion, with respect to its linear approximation, is essentiallythe curvature of Earth’s heliocentric orbit. Thus the use ofthe linear approximation cannot be accurate to 10–4 AUwhen used over a distance larger than 10 4– = 10–2 AU.Thus, as a rule of thumb for Earth encounters, if d cos α isnot more than several lunar distances, then the local curva-ture of the confidence region will have only a small effectand the value of d sin α will be a reliable estimate of theMOID to within a few Earth radii. This implies that evenencounters detected along the nominal orbit cannot be re-liably recognized as threatening using linear theories untilthe impact probability exceeds ~10–3. For all these reasons,the linear analysis of the nominal trajectory is often inade-quate or even erroneous, and nonlinear sampling and analy-sis techniques are required.
4. VIRTUAL ASTEROIDS
4.1. Discretization of the Confidence Region
When an asteroid is discovered, we cannot immediatelyknow “the orbit” of the real object; rather, we can describeour knowledge by thinking of a swarm of virtual asteroids(VAs) with slightly different orbits all compatible with theobservations. The reality of the asteroid is shared amongthe VAs, in the sense that only one of them is real but wedo not know which one. Since the confidence region con-tains a continuum of orbits, each virtual asteroid is in turnrepresentative of a small region; i.e., its orbit is also uncer-tain, but to a much smaller degree. This smaller uncertaintyenables us to use for each VA some local algorithms, suchas linearization, that would be inappropriate over the entireconfidence region. Note that the nominal orbit is just oneof the VAs, and is not extraordinary in this context.
The problem is then how to sample the confidence re-gion with a limited number of VAs (in practice, a numberranging between a thousand and several tens of thousands)in such a way that, if an impact is indeed compatible withthe available information, a virtual impactor (VI) is foundamong the selected virtual asteroids (Milani et al., 2000a).Again, a VI is not an isolated collision orbit, but a repre-sentative of a small connected set in the confidence regionin the initial conditions space, formed by points leading toa collision with a given planet at approximately the sametime. Two main approaches have been devised to scan forVIs: the Monte Carlo methods and the line-of-variationsmethods.
4.2. Monte Carlo Sampling
The Monte Carlo (MC) methods directly use the proba-bilistic interpretation of the least-squares principle. Sincethe orbit-determination process yields a probabilistic dis-

Milani et al.: Asteroid Close Approaches 61
tribution in the space of orbital elements, the distributioncan be randomly sampled to obtain a set of equally prob-able virtual asteroids. They will be more dense near thenominal solution, where the probability density is maxi-mum, and progressively less dense as the RMS of the re-siduals increases.
The random sampling needed to begin an MC test canbe done in a simple way in the linear case, where the prob-ability density in the orbital-elements space is well approxi-mated by a Gaussian distribution with the mean value andcovariance established by the nominal solution. In this case,a standard random number generator, providing a unit vari-ance Gaussian distribution for a single variable, can be usedto generate a random sampling according to the Gaussiandistribution in the elements space (Chodas and Yeomans,1999c).
In the nonlinear case, the probability density in the or-bital-elements space is not given by an explicit analyticalformula and, although it theoretically exists, cannot be di-rectly computed. Thus the random sampling needs to takeplace in the space of observations, where the probabilitydensity is assumed to be Gaussian according to some as-sumed error model, although establishing such a model is acomplex problem (Carpino et al., 2001). The orbit determi-nation process is then repeated, and the nominal solutionfor each set of modified observations is taken as a VA. Ofcourse, this nonlinear MC procedure is computationallymore expensive and should be used only when a linear MCis inappropriate. In practice, however, the cases that requirethe nonlinear MC treatment have very short observationalarcs (typically much less than 30 days), and the time inter-val over which to search for impactors is orders of magni-tude longer. Thus the computational load of the orbit determi-nation is much less than the propagation, and the overheadof the nonlinear MC method (with respect to the linear MC)is not important.
4.3. Line of Variations Sampling
Whereas the MC samples consist of a scattering of un-related points covering the entire six-dimensional confi-dence region, there are important computational advantagesto sampling a reduced subspace (e.g., a one-dimensionalcontinuous line) that is hopefully representative of the en-tire confidence region. For this purpose we can use the lineof variations (LOV), which is the line of weakness of theorbit-determination solution. In the linear case, when theconfidence region is well represented by the confidenceellipsoid, the LOV is simply the major axis of the ellipsoidZX, defined by the eigendirection V1 associated with thelargest eigenvalue λ1 of the nominal covariance matrixΓ(X*), and its semilength is σ1 = λ1. In the nonlinear case,for each solution X in the confidence region we can com-pute the covariance matrix Γ(X) and the corresponding uniteigenvector V1(X) satisfying some orientation rule, e.g., thecomponent of V1 along the axis of the semimajor axis ispositive. Then σ1(X)V1(X) is a well-defined, smooth vector
field, and the LOV is the unique solution of the ordinarydifferential equation
dX
dX V X
σσ= 1 1( ) ( )
with initial conditions at the nominal solution X* for σ = 0.A numerical method for solving this equation is describedby Milani (1999); more accurate methods have been devel-oped for this and other applications.
It is natural to sample the LOV with VAs spaced uni-formly in the cumulative probability so that each VA, rep-resenting a slice of the confidence region, has the sameprobability of representing the true orbit. One approach isto assume a Gaussian distribution along the LOV, whichleads to short steps in the independent variable σ near zeroand progressively larger steps as one moves away from thenominal solution. An alternate and more convenient ap-proximation assumes a uniform probability density up tosome value (e.g., for –3 ≤ σ ≤ 3); under this hypothesis thesampling will be uniform in σ.
4.4. Discussion
Our ultimate objective in this development is to investi-gate the entirety of the orbital confidence region to deter-mine if there is any meaningful possibility of future colli-sion. To this end, after computing a set of virtual asteroids,one must propagate each of them forward to the end ofsome timespan of interest, which in most cases extends 50–100 yr into the future. During the propagations any plan-etary encounters are noted for later analysis.
The most straightforward means of searching for colli-sions is to note the VAs that impact directly. With this verysimple approach, if some of the VAs have close approacheswithin the radius of the planet they qualify as Virtual Im-pactors, and a simple estimate of the probability of impactfor that asteroid over the timespan of interest would simplybe the ratio of VIs to VAs. The LOV method of generatingVAs is ill suited to this technique because such VAs cannotimpact unless the LOV directly intersects Earth on the targetplane, even though nearby off-LOV solutions may impact.However, the Monte Carlo-derived VAs do sample the entirevolume of the orbital confidence region, and thus they canreveal all potential collisions with a reliability described byPoisson statistics. But this points to the main limitation ofsuch a simple method: A VI can be reliably detected only ifthe impact probability is of the order of the inverse of thenumber of VAs used. For example, to achieve a completescan of the confidence region down to probabilities of im-pact of ~10–6 would require the propagation of a few mil-lion orbits, presently requiring a week or two of CPU time(for just one NEA). Thus this approach is currently too ineffi-cient to be generally practical. For this reason it is necessaryto apply some form of local analysis in the neighborhoodof the close approaches detected for each VA.
The LOV approach is especially favorable for local analy-sis because one can exploit the fact that the LOV VAs be-

62 Asteroids III
long to a continuous one-dimensional set. Thus it is possi-ble to interpolate between the target plane points belongingto two consecutive VAs. As an example, if one VA passesfrom the nodal point before Earth, and the next consecutiveone passes behind Earth, by continuity there must be a pointon the LOV, corresponding to an intermediate value of σ,such that the encounter takes place at the MOID. Thereforethe MOID of the VA orbit, at a time shortly before the en-counter, can be used as a criterion to identify any potentiallythreatening encounters. In such cases some local analysisis needed to search for VI regions significantly smaller thanthe VA sampling scale, thus permitting searches for VIs witha probability significantly lower than the inverse of the num-ber of VAs. Monte Carlo solutions are less well suited tointerpolation because they are not ordered and are not con-strained to a subspace. However, as was explained in sec-tion 3.4, the trace of the confidence region on the targetplane is often a very narrow strip (e.g., see Figs. 1 and 2).In such cases this LOV interpolation can also be done usingMC-derived VAs, but one must take care to ensure that theinterpolation is based on dynamically similar VAs, as this isnot generally clear a priori.
Even though interpolation along the LOV is generallyvery effective, we cannot be confident that the LOV ap-proach will detect all potential collisions. If some VIs liewell off the LOV and are separated from it by some strongnonlinearity (e.g., the MOID having been changed withrespect to the value along the LOV by some encounter atthe other node or with another planet), then the VAs selectedalong the LOV may fail to indicate some potentially threat-ening encounters. The MC approach would, in principle,reveal such encounters. In the end, we reach the conclusionthat both methods have important advantages, and a robustsearch procedure should use both methods in a coherenthybrid scheme to ensure efficient and reliable detection ofall VIs above a given probability.
5. NONLINEAR TARGET-PLANE ANALYSIS
5.1. All Possible Encounters
Whether the confidence region in initial orbital elementsis sampled with a Monte Carlo method, yielding a cloudof VAs, or with a Line Of Variations method, yielding a one-dimensional string of VAs, the samples are all numericallyintegrated forward to some time horizon (typically 50–100 yr), and all close approaches to perturbing bodieswithin some detection threshold distance are recorded. Ateach close approach, the time, distance, geocentric position,and velocity coordinates are noted. The close-approachthreshold distance used for Earth is typically ~0.1–0.2 AU.
As noted in the previous section, a simple search for VIsamong the sample VA orbits is not adequate for finding allpotential collisions because this approach is likely to misslow-probability impacts. Consider, for example, a lost as-teroid. Its confidence region quickly spreads along the en-tire orbit, which for a typical NEA has a length of ~10 AU.
Since the diameter of Earth is less than 10–4 AU, and thenumber of samples is typically ~104 or less, it is unlikelythat one of the virtual asteroids will impact directly, evenif the orbits intersect and an impact is possible. There isclearly a need to use a method of local analysis in the neigh-borhood of a given VA to search for nearby VIs.
When ordered by time, the close approaches of all theVAs are seen to cluster around a series of encounter times —for example, when Earth passes close to the asteroid’s nodalcrossing point with the asteroid nearby. We call the subsetof VAs that approach Earth around a given encounter timea virtual shower, since it is reminiscent of a stream of mete-oroid particles encountering Earth. It is possible that theentire set of VAs form the shower if, for example, the en-counter time is close to the initial time t0. Often, however,the confidence region is so spread out along the orbit thatonly a small subset of VAs pass within the close-approachdetection threshold.
A shower can be broken down into separate trails, whichare subsets of closely related VAs, each subset following aqualitatively different dynamical path to the encounter.Often, a shower contains several different trails (see Table 1in Milani et al., 1999). For example, an asteroid that is lostby more than one full revolution can produce a showercontaining trails in which VAs have performed differentnumbers of revolutions around the Sun since time t0. An-other situation occurs when VAs go through a close ap-proach that changes their orbital periods in such a way asto bring them back for another close approach years later.Such resonant returns typically occur in pairs characterizedby different stretching (see section 6).
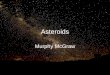
When the individual approaches of a shower are plottedin the target plane, the separate trails typically reveal them-selves through differing characteristic MOID values (Fig. 1a).Even if the initial confidence region is sampled with aMonte Carlo method, and the VAs are therefore off the lineof variations, the confidence regions of the trails are usu-ally highly stretched, with widths much narrower than thedifferences in MOIDs. As a result, it is often possible toseparate the VAs of a shower into distinct trails simply bysorting on MOID (Chodas and Yeomans, 1999c). Thismethod will not work, however, if the MOIDs of the trailsare too similar. A more reliable method of separating theVAs of a shower into separate trails is to sort and index themaccording to their semimajor axis, the variation of whichleads to the stretching in the target plane. This indexing canbe immediately obtained with the LOV method and requiresonly minimal computation for MC samples. The trails canthen be detected as sequences of n consecutive solutions Xi,i = k, k + 1, …, k + (n – 1) within a given shower (Fig. 1b).
5.2. Filtering Trails
The points of a trail are just sample points of a continu-ous line more or less following the LOV, and none needapproach very close to the minimum possible distance forthat trail. To decide if an impact is possible, we need to de-

Milani et al.: Asteroid Close Approaches 63
termine precisely how close this trail approaches Earth.Since this new problem is computationally intensive, it isessential to apply some filter to discard immediately thetrails that clearly cannot collide. Two methods are availablefor this: selection by MOID and linear analysis.
For each VA, we can compute the MOID, reduced bythe amount of gravitational focusing (as described in sec-tion 2.2 for b ) to obtain the perturbed minimum approachdistance MOIDGF. To determine whether an orbit will im-pact, the MOID should be computed based on the elementsnear the time of the encounter but not during the encoun-ter (because the effects of the encounter itself will corruptthe MOID). However, lunar perturbations on Earth causehigh-frequency fluctuations in the MOID, with amplitudeson the order of one Earth radius. This effect can be mini-mized by computing the MOID one lunar period before theencounter, but in general if MOIDGF < 2r then a collisionfor that particular trail cannot safely be ruled out, whilelarger values of MOIDGF do indicate that no impact can take
place due solely to timing uncertainty. But the MOID itselfis uncertain due to the dispersion of the orbital elements atthe time of the encounter (Bonanno, 2000), so in the ab-sence of MOID uncertainty information we must use agenerous safety margin, i.e., only ruling out collision whenMOIDGF is greater than, say the lunar distance.
As an alternative, we can perform a linear target-planeanalysis for the closest-approaching VA found in each trailand discard the cases in which an impact is well outside ofthe confidence ellipse. Both methods have advantages anddisadvantages. If the confidence ellipse on the target planeis wider than our safety margin, then the MOID of the VAunder consideration is not representative of the values theMOID could assume for initial conditions inside the confi-dence region but far from the LOV. On the other hand, ifthe VA considered has only a shallow approach (e.g., fur-ther than 0.02 AU as discussed in section 3.5), the resultsof the linear analysis can be unreliable. The best solution isto use information from both methods, e.g., using the valueof the MOID and allowing for the possibility of a decreaseof its value by the 3σ width of the confidence ellipse.
Once a particular trail has been found to allow a verylow minimum distance, i.e., too close to rule out a colli-sion, then we need to carefully determine the actual valueof this minimum. We first consider straightforward casesof trails with simple geometry and then turn to complexcases with strong nonlinearities.
5.3. Straightforward Encounters
When the VAs of a simple trail are projected onto thetarget plane, the ζ-coordinates of the intercept points forma monotonic sequence proceeding from one side of Earthto the other (i.e., spanning zero). To find the VA whichmakes the closest possible approach of a trail, several meth-ods can be used.
One technique is a variant of Newton’s method, whichstarts from the solution Xj with the closest approach amongthe VAs for the trail and applies corrections to obtain a newVA with an even closer approach. First, we compute thedirection of the long axis of the target-plane confidenceellipse for Xj; we then find the point Ymin along this linethat is closest to Earth in the target plane. The desired cor-rection in the target plane is therefore ∆Y = Ymin – F(Xj).We then need to determine a change ∆X in the initial orbitalelements about Xj that satisfies the linear mapping
DF ∆X = ∆Y
Since DF maps from a six-dimensional space to a two-di-mensional space, there is no unique solution, but with thefurther constraint that the solution minimize the sum of thesquares of residuals, a unique solution for ∆X can be found(Milani et al., 2000a). With the new solution Xj + ∆X inhand, we numerically integrate to the encounter time andcompute the new close approach distance. Since the direc-tion of the correction ∆Y is recomputed at each step, any
–6
–2
–1
0
1
2
–4 –2 0
(100,000 km)
(100
,000
km
)
2 4 6
–6
–4
–2
0
2
4
–4 –2 0
(100,000 km)
(100
,000
km
)
2 4 6
(a)
(b)
Fig. 1. The January 2046 shower from the VAs of 1998 OX4plotted on the b-plane with VAs derived by (a) MC and (b) LOVmethods. Earth is represented to scale by the small open circle inthe center of each plot. Since one of the trails clearly intersectsEarth, a collision is possible. Note that the axes in this figure arenot the (ξ, ζ) axes discussed in section 2.2, and the trails are nottherefore aligned with the vertical axis.

64 Asteroids III
curvature introduced by gravitational focusing is accountedfor. The iterations are stopped when the close approachdistances stop decreasing. This approach has proven veryeffective in most cases, but it is sometimes prone to diver-gence, especially in strongly nonlinear cases, as will be de-scribed in section 5.4.
Another method for finding the VA producing the mini-mum possible close approach along the LOV uses theregula falsi interpolation method. Starting from two con-secutive VAs having target-plane ζ-coordinates with oppo-site signs, Yj and Yj + 1, we compute the point Ymin closestto Earth along the line between them. We then obtain a newVA by interpolating to the corresponding point along theLOV between Xj and Xj + 1 in the space of initial orbitalelements and iterate the procedure. This approach does notrequire the computation of the confidence ellipse in thetarget plane or the use of the linear mapping DF, but it doesrequire that the trail comprise at least two VAs. This is incontrast to Newton’s method above, which is more complexbut can proceed from only a single point on the target plane.
Once the minimum possible distance D has been foundfor initial conditions along the LOV, we need to take intoaccount the width of the confidence region on the targetplane. The trace of the LOV on the target plane is a kind ofspine of the confidence region, and the width can be esti-mated by using the minor axis w of the confidence ellipse(see section 3.4). For example, since w corresponds to 1σ,the minimum distance to the confidence region correspond-ing to σ = 3 is approximately D – 3w, assuming that D > 3w.The knowledge of the distance between the LOV and Earth,measured in sigmas, can be essential for evaluating the prob-ability of impact, as detailed in section 5.5. This approxima-tion corresponds to linearization in the neighborhood of theLOV point corresponding to the close approach at distanceD, and this is adequate if D and w are small enough.
Both Newton’s and the interpolation methods movealong the line of variation to determine the minimum en-counter distance. There is also a method developed bySitarski (1999) that moves in the shortest direction to findthe minimum cost Q for collision, and with this informationthe impact hazard can be eliminated, or at least the impactprobability bounded. This method does not, however, per-mit a careful assessment of the impact probability since theprobability density in the vicinity of the VI is unknown.Another method has been proposed by Muinonen (1999)to find the minimum value of the penalty ∆Q compatiblewith a collision, without restricting the search to the LOV. Amixed method, involving both one-dimensional and multi-dimensional explorations of the confidence region, has beendeveloped by Muinonen et al. (2001). Additional discussionon this point is found in section 3.3 of Bowell et al. (2002).
The upper trails indicated in Fig. 1 are typical straight-forward trails. Another excellent example of this type wasthe 2028 close approach of 1997 XF11 (based upon the1997–1998 observations only). This case has a special fea-ture: The confidence region is long (millions of kilometers),but the nominal solution results in a quite close approach
in 2028. Thus linearization around the nominal is goodenough to draw the conclusion that an impact in 2028 isnot possible (Fig. 2a), despite the fact that the departurebetween the confidence region and the linear ellipse is evi-dent (hundreds of kilometers) near the ends of the 3σ target-plane ellipse (Fig. 2b); this departure is greater on the MTPthan on the b-plane (Milani and Valsecchi, 1999; Chodasand Yeomans, 1999c).
5.4. Complex Encounters
Some trails do not follow the simple behavior describedabove. When the VAs for these complex trails are projectedinto the target plane, the sequence of intercept points ap-proaches Earth along the LOV, slows down its approach,
102–40
–38
–36
–34
–32
–30
–28
–26
104 106 108 110
(10,000 km)
(10,
000
km)
112 114 116
–20
0
5
10
15
20
25
30
35
–15 –10 –5 0
(1000 km)
(100
0 km
)
5 10 15 20
(a)
(b)
Fig. 2. The linear (3σ ellipse) and nonlinear (Monte Carlo points)confidence regions on the 2028 b-plane for the 88-d arc of 1997XF11. (a) Confidence region near nominal solution; (b) confidenceregion near 3σ. The full region extends over some 2,000,000 km,but is only 2000 km wide.

Milani et al.: Asteroid Close Approaches 65
and then turns back and recedes in the direction from whichit approached (see Fig. 7 in Milani et al., 2000b). We callthis behavior an interrupted return, and it arises as a resultof previous close approaches, as explained in section 6. Thebottom trail depicted in Fig. 1 is an interrupted return, asis clear from Fig. 1b where the trail both enters and exitsthe figure on the right. If the orientation of the LOV ismapped on the target plane for each VA then this reversalin direction can easily be detected.
It can be shown that for an interrupted return the deriva-tive of ∆t with respect to the σ parameter on the LOV passesthrough zero, and, not surprisingly, Newton’s method canfail completely for these strongly nonlinear cases. Methodsto identify such cases, and to perform an alternative localanalysis to detect possible degenerate VIs and estimate theirimpact probability, are being tested. One possible approachis to use an LOV method including controls to detect in-terrupted returns and revert to an MC method restricted tothe neighborhood of the VA near the folding point of theinterrupted return. Another possibility is to use the regulafalsi method along the LOV, exploiting the fact that minimaof the approach distance D as a function of σ do exist, andthey can be identified as zeros of the derivative dD/dσ. Wemust handle interrupted returns carefully because the pointon the target plane at which the trail appears to stop andgo back has relatively low stretching and may actually lieinside Earth’s disk. This corresponds to the tangent case ofsection 6 and may result in a probability of impact largerthat that of an ordinary trail.
5.5. Probability of Impact
If the minimum possible close approach distance of atrail is less than one Earth radius, then we know that animpact is possible, and our next task is to estimate the prob-ability of impact PI. In the following, we assume that wehave identified the orbit XI with the minimum possible en-counter distance along the LOV as described in section 5.3.For this orbit we have σΛ, which is the σ distance from thenominal along the LOV, and we also have the target-planecovariance ΓY, from which we obtain the local stretchingΛ and semiwidth w.
Now, taking XI as nominal, we can compute the impactprobability PI according to the linearized procedure de-scribed in section 3.4. We note that, since we are at theminimum distance point along the LOV, the assumption oflocal linearity is valid despite the fact that the location andproperties of the trail itself may be dominated by nonlineareffects (see Fig. 2). But since XI is not actually the nominalorbit, we must correct PI for the distance from the nominalto obtain
P Pp
pI I=( (
( )
σΛ
0
where we have used again the univariate probability den-sity p(σ) discussed in section 3.4.
When Λ is large (e.g., greater than the lunar distance),as is typical for highly stretched, far-future encounters, thestrip approximation (section 3.4) permits the assumptionthat the probability density is a constant over the cross-sec-tion of Earth, which allows a very simple and convenientcomputation of the probability. If we can further assumethat w << r , then simple one-dimensional methods may beused, since the full width of the confidence strip falls ontoEarth. In this case, the geometric chord length l of the in-tersection of the trail’s LOV with Earth’s disk is the mainparameter of interest, and PI is computed from the cumu-lative probability distribution over l
PI =Λ
p( (σΛ
On the other hand, when w >> r , fully two-dimensionalmethods must be used to compute impact probability; thisonly requires the additional consideration of the lateral dis-tance to the geocenter σw so that the probability densityorthogonal to the LOV can be computed. PI is then calcu-lated from a constant bivariate probability density integratedover the cross-section of Earth
Pp p
rI =ω
πΛ
2( (σΛ ( (σω
When w = r , these approximations are not suitable becausep(σw) cannot be assumed constant over the width of Earth:A two-dimensional probability integral needs to be com-puted. Even more complicated cases can be handled withsuitable probabilistic formalisms, such as the ones of Mui-nonen et al. (2001).
6. RETURNS AND KEYHOLES
6.1. Resonant Returns
Virtual impactors are normally found numerically, giventhat a realistic physical model of their motion is quite com-plex; on the other hand, an exploration of the problem us-ing analytical tools can give insight into the approximatelocation of VIs in elements space. Let us discuss the simpleand rather common case of a VI whose impact takes placeat a resonant return.
A resonant return occurs when, as a consequence of anencounter with Earth, the asteroid is perturbed into an or-bit of period P' ≈ k/h yr, with h and k integers; then, afterh revolutions of the asteroid and k revolutions of Earth, bothbodies are again in the region where the first encounteroccurred and a second encounter takes place (Milani et al.,1999).
An analytical theory of resonant returns has been re-cently developed by Valsecchi et al. (2001). This theorytreats close encounters with a suitable extension of Öpik’stheory (Öpik, 1976), and adds a Keplerian heliocentricpropagation (modified to account for the evolution of the

66 Asteroids III
MOID; see section 6.2) between encounters, thus establish-ing a link between the outcome of an encounter and theinitial conditions of the following one. The motion duringan encounter with Earth is modeled by simply assuming thatit takes place on a hyperbola; one of the asymptotes of thehyperbola, directed along the unperturbed geocentric en-counter velocity v∞, crosses the b-plane at a right angle, andthe vector from Earth to the intersection point is b.
We can describe v∞ in terms of its modulus, v∞, and twoangles, θ and φ; θ is the angle between v∞ and Earth’s he-liocentric velocity v , while φ is the angle between the planecontaining v∞ and v and the plane containing v and theecliptic pole.
We recall the (ξ, η, ζ) reference frame defined in sec-tion 2.2, where η is normal to the b-plane and ζ is orientedin the direction opposite to that of the projection of v onthe b-plane. Then ξ lies in both the b-plane and the planenormal to v (Greenberg et al., 1988). This choice of theb-plane coordinates has the nice property that ξ is simplythe local MOID, while ζ is proportional to the time delaywith which the asteroid “misses” the closest possible ap-proach to Earth.
Öpik’s theory then simply states that the encounter con-sists of the instantaneous transition, when the small bodyreaches the b-plane, from the preencounter velocity vectorv∞ to the postencounter vector v'∞, such that v'∞ = v∞, andθ' and φ' are simple functions of v∞, θ, φ, ξ, and ζ; the anglebetween v∞ and v'∞ is the deflection γ, given by
tanγ2
= c
b
where c = GM /v2∞. Finally, simple expressions relate a, e,
i to v∞, θ, φ (Carusi et al., 1990), and ω, Ω, f to ξ, ζ, t0(Valsecchi et al., 2001); t0 is the time at which the asteroidpasses at the node closer to the encounter. It is important tonote that for small encounter distance a depends only on v∞and θ and, correspondingly, a' depends only on v∞ and θ'.
We can formulate the condition for a resonant return tooccur as a condition on θ'; for a ratio of the periods equalto k/h, we obtain a value of a', say a'0, given by a'0 = k h2 23 / ,and a corresponding value of θ', say θ'0.
Given θ, we can easily compute θ'0 from ξ, ζ:
cos cos sinθ θ θ ζ0
2 2
2 2 2 2
2= −+
++
b cb c
cb c
'
thus obtaining the locus of points on the b-plane leadingto a given resonant return. We can rearrange it in the form
ξ2 + ζ2 – 2Dζ + D2 = R2
that is the equation of a circle centered on the ζ-axis (Val-secchi et al., 2000); R is the radius of such a circle and Dis the value of the ζ-coordinate of its center, and they canbe obtained from
Rc
Dc
=−
=−
sin
cos cos
sin
cos cos
θ
θθ
θ0
θ0
θ0
'
'
'
Actually, the expression for the locus of points on the b-plane leading to a given resonant return contains terms thatare of the third order in ξ, ζ, and c (Valsecchi et al., 2001),but for the purposes of the present qualitative discussionthese terms can be ignored.
Figure 3a shows the arrangement of the b-plane circlescorresponding to resonant returns to close encounters in2040, 2044, and 2046 for the August 2027 encounter ofasteroid 1999 AN10; these correspond, respectively, to themean-motion resonances 7:13, 10:17, and 11:19. A straightline is also drawn in the plot at ξ = 6r that represents astring of VAs having the same orbit and MOID (and thusthe same ξ) and spaced in the timing of encounter withEarth (and thus different values of ζ). It is clear that in suchan arrangement there are two regions for each resonancethat lead to resonant returns, and it is also clear that theyare located at the crossings of the straight line with the ap-propriate circle. Figure 3a also shows the circle associatedwith the 3:5 mean-motion resonance, corresponding to aresonant encounter in 2032; note that the straight line doesnot actually touch the circle, implying that no close encoun-ter takes place.
6.2. Keyholes
Chodas (1999) introduced the term “keyhole” to indi-cate small regions of the b-plane of a specific close encoun-ter such that, if the asteroid passes through one of them, itwill hit Earth on a subsequent return. This can be general-ized by requiring that the subsequent approach occurs towithin a given small distance. An impact keyhole is thusjust one of the possible preimages of Earth’s cross sectionon the b-plane and is therefore tied to the specific value forthe postencounter semimajor axis that allows the occurrenceof the next encounter at the given date. Figure 3b depictsthe two keyholes associated with the 7:13 resonance thatare also shown in the top half of Fig. 3a.
The b-plane circles corresponding to a given a' addressthe question of the timing (i.e., the ζ-coordinate) of thesubsequent encounter. However, if we use a simple Kep-lerian propagation between encounters, this would leave un-changed the MOID (the ξ-coordinate) of the next encounter.This would be unrealistic, as in general, the MOID variesbetween encounters for two main reasons: On a long time-scale, secular perturbations (Gronchi and Milani, 2001)make it slowly evolve through the so-called Kozai cycle,or ω-cycle, while on a shorter timescale significant quasi-periodic variations are caused by planetary perturbationsand, for planets with massive satellites, by the displacementof the planet with respect to the center of mass of the planet-satellite system.

Milani et al.: Asteroid Close Approaches 67
For the purpose of obtaining the size and shape of animpact keyhole we can, however, just model the secularvariation of the MOID as a linear term affecting ξ", thevalue of ξ at the next encounter
ξ ξ ξ" '= + −d
dt(t" t'0 0 (
where t'0 and t"0 are the times of passage at the node, on thepost-first-encounter orbit, that are closest to, respectively,the first and the second encounter. We can compute the timederivative of ξ either from a suitable secular theory for cross-ing orbits (Gronchi and Milani, 2001) or by deducing itfrom a numerical integration. The result could then be cor-rected to take into account the short periodic terms, possiblyby using the output of a numerical integration. Without suchnumerical corrections, the theory would reliably predictvery close encounters (e.g., within a few thousandths ofAU), but not collisions, which require accuracies an orderof magnitude better.
The computation of the size and shape of an impact key-hole is described in detail in Valsecchi et al. (2001); here wegive a qualitative discussion. Let us start from the imageof Earth in the b-plane of the subsequent encounter, the onein which the impact should take place. We denote the coor-dinate axes in this plane as ξ", ζ" and consider the circlecentered in the origin and of radius b . The points on theb-plane of the first encounter that are mapped — by the Kep-lerian propagation plus the MOID drift — into the pointsof Earth’s image circle in the b-plane of the second encoun-ter constitute the Earth preimage we are looking for.
As far as the location is concerned, impact keyholes mustlie close to the intersections, in the first encounter b-plane,of the circle corresponding to the suitable resonant returnand the vertical line expressing the condition that the MOIDbe equal to
− d
dt
ξ −(t" t'0 0 (
What about size and shape? To address this question, wecan examine the matrix of partial derivatives ∂(ξ",ζ")/∂(ξ,ζ).We do this under the assumption, as in Valsecchi et al.(2001), that for the encounter of interest c2 << b2, since thiscondition is not too restrictive in most asteroid encounterswith Earth. The matrix of partial derivatives has the follow-ing structure
∂∂
∂∂
∂∂
∂∂
≈
ξξ
ξζ
ζξ
ζζ
" "
" "
1
1 2 14
2 2
4
+
− + + −hf hf
cb
cb
bcb b( ) ξζ ξ ζ
( ( ( (
( (
where f is a constant not depending on h.The first row of the matrix shows that the ξ dimension
of the preimage of Earth is essentially unchanged; the sec-ond row, however, gives a completely different picture.First, both derivatives grow linearly with h, the number of
(a)
(b)
Keyholes to2040 encounter
0 3 6 9
6 0 6 ξ
0
3
6
9
6
0
6
ζ
Fig. 3. Circles corresponding to various mean-motion resonanceson the b-plane of the August 2027 encounter with Earth of aster-oid 1999 AN10. Distances are in Earth radii augmented for gravi-tational focusing (b ; see section 2.2). (a) Uppermost circle: 7:13resonance; then, with the centers along the ζ-axis, from top tobottom: 3:5, 10:17, and 11:19 resonances. The vertical line at ξ =5.5 b represents fictitious asteroids, all with the same orbit as1999 AN10 and spaced in the time of encounter with Earth.(b) Explicit depiction of keyholes for the 2040 returns on the 2027b-plane of 1999 AN10. The stream of Monte Carlo points corre-sponds to the vertical line in (a). The dashes represent the best-fitting circle passing through the impacting zones.

68 Asteroids III
heliocentric revolutions the asteroid makes between the twoencounters; second, the relative size of the two elementsof this row depends critically on the values of ξ and ζ. Apartfrom the case in which ξ ≈ ζ, which we will discuss be-low, ∂ζ"/∂ζ can be rather large; this means that the separa-tion in ζ of two VAs, that grows with ∂ζ"/∂ζ going fromthe first to the second encounter, can increase by a largeamount. If we now go backward in time, from the secondto the first encounter, the expansion in ζ becomes a con-traction; this contraction affects the preimage of Earth, bysqueezing it along ζ. The result of this is that the keyholehas the form of a lunar crescent that closely follows theappropriate b-plane circle, with a “width” in ξ of about 2band a maximum thickness of ~2b /(∂ζ"/∂ζ).
When ξ = ζ, the third term in ∂ζ"/∂ζ becomes 0, andsomewhere in the vicinity the entire derivative becomesvery small, <1; this can happen if the absolute value of theMOID at the first encounter is equal to the radius of theappropriate resonant circle. As a consequence of the small-ness of ∂ζ"/∂ζ, the dimension in ζ of the keyhole can belarger than b !
The possibility of anomalously large keyholes is a mani-festation of a more general phenomenon that takes placewhenever a string of VAs is almost tangent to, but does notcross, a resonant return circle, as in the case of the 3:5 reso-nant circle shown in Fig. 3a. When this is the case, whathappens at the time of the resonant return is that the stringof VAs “enters” the b-plane of the resonant encounter fromthe side of either positive or negative ζ but then, since noneof the VAs quite reaches the resonant semimajor axis, atsome point it has to “turn back.” The turning point is obvi-ously a point where ∂ζ"/∂ζ = 0. This situation is frequentlyencountered in numerical integrations and is also known as“interrupted return,” as shown in the lower trail of Fig. 1.If this was to take place with the MOID at the second en-counter <b , an anomalously large keyhole would occur.
As stated above, the computation of VIs requires sophis-ticated numerical modeling of the orbital evolution. In thiscontext, the simplifications made in the theory just de-scribed may lead one to think that it has no practical value.However, the main advantage of the theory is the geometri-cal understanding of the global structure of potentially im-pacting solutions that it gives, and this is particularly rele-vant for complex or pathological cases such as interruptedreturns. In this sense, it can be considered as a tool for guid-ing the numerical explorations and for contriving fictitiouscritical scenarios to be fed to automatic monitoring pro-grams for testing.
7. CONCLUSIONS AND FUTURE WORK
The last three years have seen both an enormous increasein our ability to identify impact possibilities and the estab-lishment of the first efficient impact-monitoring system; thisprogress has been in part driven by the discovery of ob-jects in orbits with very small, but detectable, Earth-impactregions within their confidence region. The situation is now
evolving toward a more systematic study of the problem,with the goal of improving the currently operating moni-toring system (CLOMON) and of establishing an additionaland independent one at JPL.
As a consequence of the first two years or so of opera-tion of CLOMON, with the capability of detecting collisionpossibilities for newly discovered objects while they are stillobservable, it has become routinely possible to concentratefollowup observations on potentially colliding NEAs; infact, most NEAs larger than ~100 m in diameter discoveredafter the end of 1999, having impact possibilities in the con-fidence regions of their short-arc orbits, have been followedlong enough that their confidence regions could be reducedto the point of excluding any detectable impact.
The analytic theory as it stands is still largely incom-plete. Future developments should include (1) a completetreatment of nonresonant returns, i.e., returns taking placeat the other node, for asteroids having either both nodes ata heliocentric distance very close to 1 AU, or the other nodeat a heliocentric distance very close to the orbital radius ofanother planet; (2) a better understanding of the complexphenomena associated with interrupted returns and anoma-lously large keyholes; and (3) the possibility of sequencesof more than two encounters, with the last encounter of thesequence leading to an impact.
The work now in progress, the results of which shouldbe available soon, includes the following developments andtests: (1) the Sentry system, a fully independent monitoringsystem at JPL, which will include “second-generation” fea-tures such as the ones mentioned below (the second-gen-eration CLOMON-2 system is also under development);(2) improved methods to handle interrupted returns in or-der to sharply reduce the cases of divergent iterations in theNewton method; (3) mechanisms to implement focused ordensified Monte Carlos to handle difficult cases, includinginterrupted returns; and (4) a new observation weightingscheme that allows the use of modified Gaussian probabili-ties as a reliable estimate of impact probabilities.
Note added in proof: The second-generation impactmonitoring systems are now on line, both the Sentry systemat JPL (http://neo.jpl.nasa.gov/risk/) and the CLOMON2system at the University of Pisa (http://newton.dm.unipi.it/cgi-bin/neodys/neoibo?riskpage:0;main) and duplicated atthe University of Valladolid (http://unicorn.eis.uva.es/cgi-bin/neodys/neoibo?riskpage:0;main).
Acknowledgments. This research was conducted at the Uni-versity of Pisa and at IAS-CNR under a contract with the ItalianSpace Agency, and at the Jet Propulsion Laboratory, CaliforniaInstitute of Technology, under a contract with the National Aero-nautics and Space Administration.
REFERENCES
Bonanno C. (2000) An analytical approximation for the MOIDand its consequences. Astron. Astrophys., 360, 411–416.
Bowell E. and Muinonen K. (1994) Earth-crossing asteroids and

Milani et al.: Asteroid Close Approaches 69
comets: Groundbased search strategies. In Hazards Due toComets and Asteroids (T. Gehrels, ed.), pp. 149–197. Univ. ofArizona, Tucson.
Bowell E., Virtanen J., Muinonen K., and Boattini A. (2002)Asteroid orbit computation. In Asteroids III (W. F. Bottke Jr.et al., eds.), this volume. Univ. of Arizona, Tucson.
Carpino M., Milani A., and Chesley S. R. (2001) Error statisticsof asteroid optical astrometric observations. Icarus, in press.
Carusi A., Valsecchi G. B., and Greenberg R. (1990) Planetaryclose encounters: Geometry of approach and post-encounterorbital parameters. Cel. Mech. Dyn. Astron., 49, 111–131.
Chesley S. R. and Milani A. (2000) An automatic Earth-asteroidcollision monitoring system. Bull. Am. Astron. Soc., 32, 0602.
Chesley S. R., Chodas P. W., Milani A., Valsecchi G. B., andYeomans D. K. (2001) Quantifying the risk posed by potentialEarth impacts. Icarus, in press.
Chodas P. W. (1993) Estimating the impact probability of a minorplanet with the Earth. Bull. Am. Astron. Soc., 25, 1236.
Chodas P. W. (1999) Orbit uncertainties, keyholes, and collisionprobabilities. Bull. Am. Astron. Soc., 31, 2804.
Chodas P. W. and Yeomans D. K. (1994) Predicting close ap-proaches of asteroids and comets to earth. In Hazards Due toComets and Asteroids (T. Gehrels, ed.), pp. 241–258. Univ. ofArizona, Tucson.
Chodas P. W. and Yeomans D. K. (1996) The orbital motion andimpact circumstances of Comet Shoemaker-Levy 9. In TheCollision of Comet Shoemaker-Levy 9 and Jupiter (K. S. Nollet al., eds.), pp. 1–30. IAU Colloq. 156.
Chodas P. W. and Yeomans D. K. (1999a) Could asteroid 1997XF11 collide with Earth after 2028? Bull. Am. Astron. Soc., 31,703.
Chodas P. W. and Yeomans D. K. (1999b) Orbit determination andestimation of impact probability for near-Earth objects. PaperAAS 99-002, 21st Annual AAS Guidance and Control Con-ference, Breckenridge, Colorado.
Chodas P. W. and Yeomans D. K. (1999c) Predicting close ap-proaches and estimating impact probabilities for near-Earthobjects. Paper AAS 99–462, AAS/AIAA Astrodynamics Spe-cialists Conference, Girdwood, Alaska.
Gehrels T., Matthews M. S., and Schumann A. M., eds. (1994)Hazards Due to Comets and Asteroids. Univ. of Arizona, Tuc-son. 1300 pp.
Greenberg R., Carusi A., and Valsecchi G. B. (1988) Outcomes ofplanetary close encounters: A systematic comparison of meth-odologies. Icarus, 75, 1–29.
Gronchi G. F. (2001) On the stationary points of the squared dis-tance between two ellipses with a common focus. SIAM J. Sci.Comp., in press.
Gronchi G. F. and Milani A. (2001) Proper elements for Earth-crossing asteroids. Icarus, 152, 58–69.
Jazwinski A. H. (1970) Stochastic Processes and Filtering Theory.Academic, New York. 376 pp.
Kizner W. (1959) A Method of Describing Miss Distances forLunar and Interplanetary Trajectories. External PublicationNo. 674, Jet Propulsion Laboratory, California Institute ofTechnology.
Marsden B. G. (1999) A discourse on 1997 XF11. J. British Inter-planet. Soc., 52, 195–202.
Milani A. (1999) The asteroid identification problem I: Recoveryof lost asteroids. Icarus, 137, 269–292.
Milani A. and Valsecchi G. B. (1999) The asteroid identificationproblem II: Target plane confidence boundaries. Icarus, 140,408–423.
Milani A., Chesley S. R., and Valsecchi G. B. (1999) Close ap-proaches of asteroid 1999 AN10: Resonant and non-resonantreturns. Astron. Astrophys., 346, L65–L68.
Milani A., Chesley S. R., Boattini A., and Valsecchi G. B. (2000a)Virtual impactors: Search and destroy. Icarus, 145, 12–24.
Milani A., Chesley S. R., and Valsecchi G. B. (2000b) Asteroidclose encounters with Earth: Risk assessment. Planet. SpaceSci., 48, 945–954.
Morrison D., ed. (1992) The Spaceguard Survey: Report of the NASAInternational Near-Earth-Object Detection Workshop. (Avail-able on line at http://impact.arc.nasa.gov/reports spaceguard/)
Muinonen K. (1999) Asteroid and comet encounters with theEarth: Impact hazard and collision probability. In The Dynam-ics of Small Bodies in the Solar System, A Major Key to SolarSystem Studies (A. E. Roy and B. A. Steves, eds.), p. 127.NATO ASI Proc. 522, Kluwer, Dordrecht.
Muinonen K. and Bowell E. (1993) Asteroid orbit determinationusing Bayesian probabilities. Icarus, 104, 255–279.
Muinonen K., Virtanen J., and Bowell E. (2001) Collision prob-ability for Earth-crossing asteroids using orbital ranging. Cel.Mech. Dyn. Astron., 81, 93–101.
Öpik E. J. (1976) Interplanetary Encounters: Close-Range Gravi-tational Interactions. Elsevier, New York. 155 pp.
Sitarski G. (1968) Approaches of the parabolic comets to the outerplanets. Acta Astron., 18, 171–195.
Sitarski G. (1999) How to find an impact orbit for the Earth-aster-oid collision. Acta Astron., 49, 421–431.
Valsecchi G. B., Milani A., Gronchi G. F., and Chesley S. R.(2000) The distribution of energy perturbations at planetaryclose encounters. Cel. Mech. Dyn. Astron., 78, 83–91.
Valsecchi G. B., Milani A., Gronchi G. F., and Chesley S. R.(2001) Resonant return to close approach: Analytical theory.Astron. Astrophys., in press.
Yeomans D. K. and Chodas P. (1993) Periodic Comet Shoemaker-Levy 9 (1993e). IAU Circular 5807.