Embed Size (px)
Citation preview

Assimilation of HF Radar Data into Coastal Wave Models
NERC-funded PhD work also supervised byClive W Anderson (University of Sheffield)
Judith Wolf (Proudman Oceanographic Laboratory)
Lee Siddons and Lucy Wyatt
Department of Applied Mathematics
University of Sheffield, UK

Overview
• OSCR HF radar at Holderness
• SWAN Wave Model
• Data Assimilation and Algorithms
• Results
• Future Work


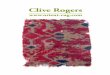
Surface current Wind direction
OSCR measurements

Wave height and peak direction
Peak wave period and direction

Energy spectrum m2/Hz
Mean direction spectrum
Directional frequency spectrum m2/Hz/rad
OSCR
buoy
OSCR wind direction

Wave Modelling
SWAN (Simulating WAves Nearshore)• The Action Balance equation:
• A is the action that is a function of frequency and direction i.e.
• C is the wave group velocity in relevant direction.• S is the forcing to the system. Winds, non-linear
interactions etc.
inyA
yxA
xtA SCC
See Holthuijsen L. H. et al (1999)
)()( fEfAf

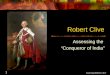
SWAN Application to Holderness
Boundary DataBoundary Data
Action
1.2km
1.2km
Data Assimilation
• The Analysis - Combination of model output (Background state) and observations in an optimal way.
• Taking into account model and observational errors.
• Making assumptions about model, observation and analysis errors.
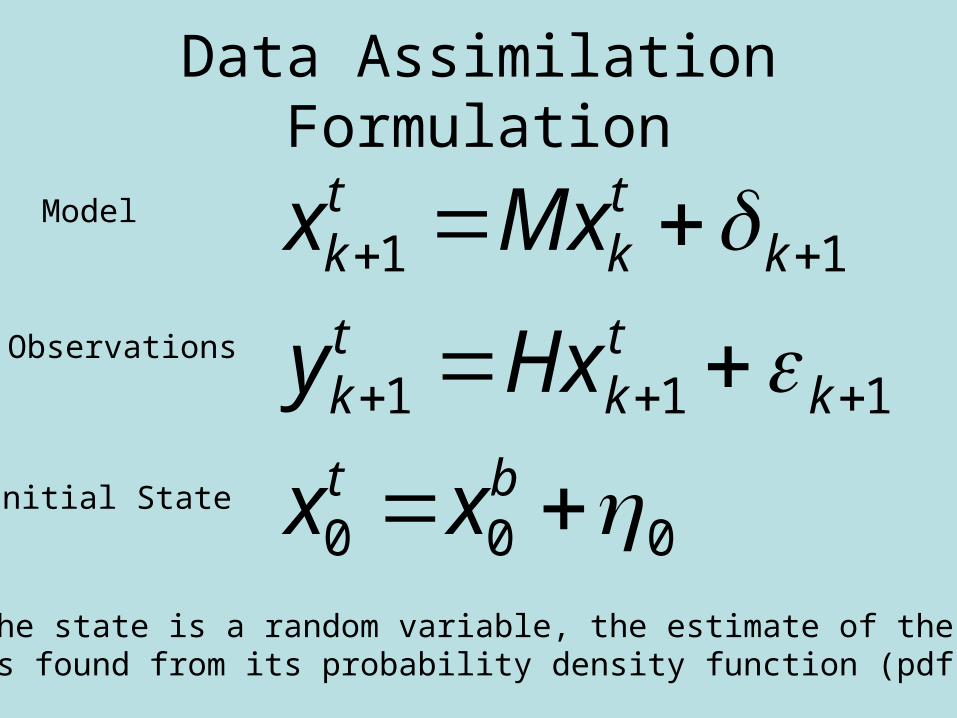
Data Assimilation Formulation
000
111
11
bt
ktk
tk
ktk
tk
xx
Hxy
MxxModel
Observations
Initial State
Since the state is a random variable, the estimate of the state is found from its probability density function (pdf).

The State of the Ocean The state of the ocean is often described in terms of a few wave parameters, for example: • Significant Wave Height Hs
• Mean wave period T1
These are the state variables used in our assimilations
ddffEHs ,*4
dfdfEf
dfdfE
MT
f )(
)(11

Assimilation AlgorithmsThere are two main approaches of assimilation.
Sequential Assimilation
Only considers observations from the past and to the time of the analysis. Some examples of sequential algorithms are:
• Optimal interpolation• Kalman Filters
Variational Assimilation
Observations from the future can be used at the time of the analysis.Some examples of variational algorithms are:
• Three-dimensional variational assimilation – 3DVAR• Four-dimensional variational assimilation – 4DVAR
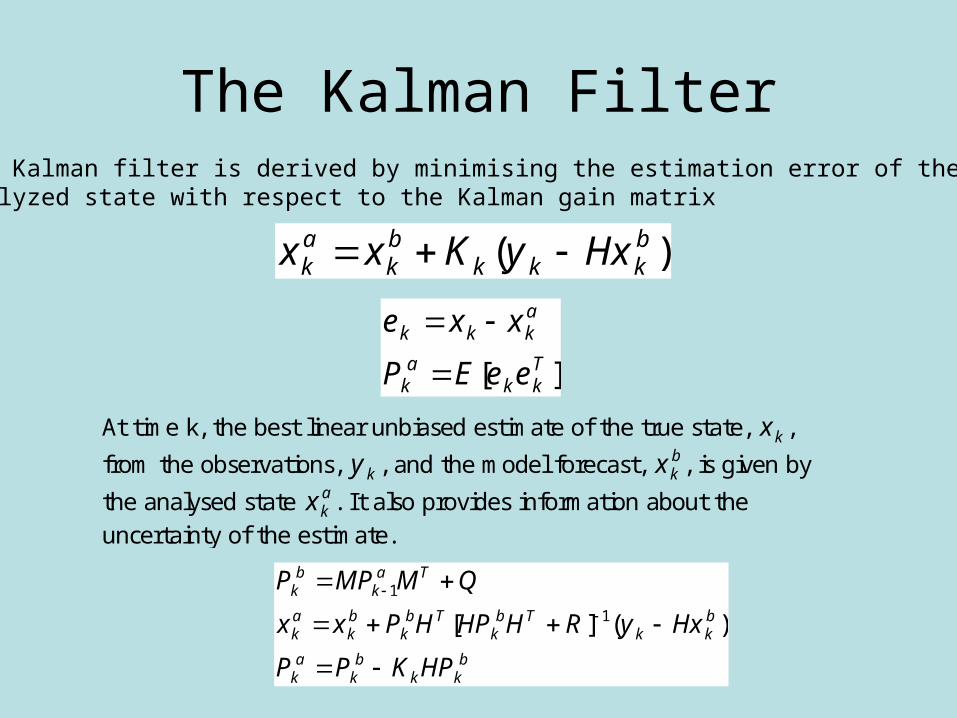
The Kalman Filter
)( bkkk
bk
ak HxyKxx
][ Tkk
ak
akkk
eeEP
xxe
The Kalman filter is derived by minimising the estimation error of the analyzed state with respect to the Kalman gain matrix
bkk
bk
ak
bkk
Tbk
Tbk
bk
ak
Tak
bk
HPKPP
HxyRHHPHPxx
QMMPP
)(][ 1
1
At time k, the best linear unbiased estimate of the true state, kx ,
from the observations, ky , and the model forecast, bkx , is given by
the analysed state akx . It also provides information about the
uncertainty of the estimate.
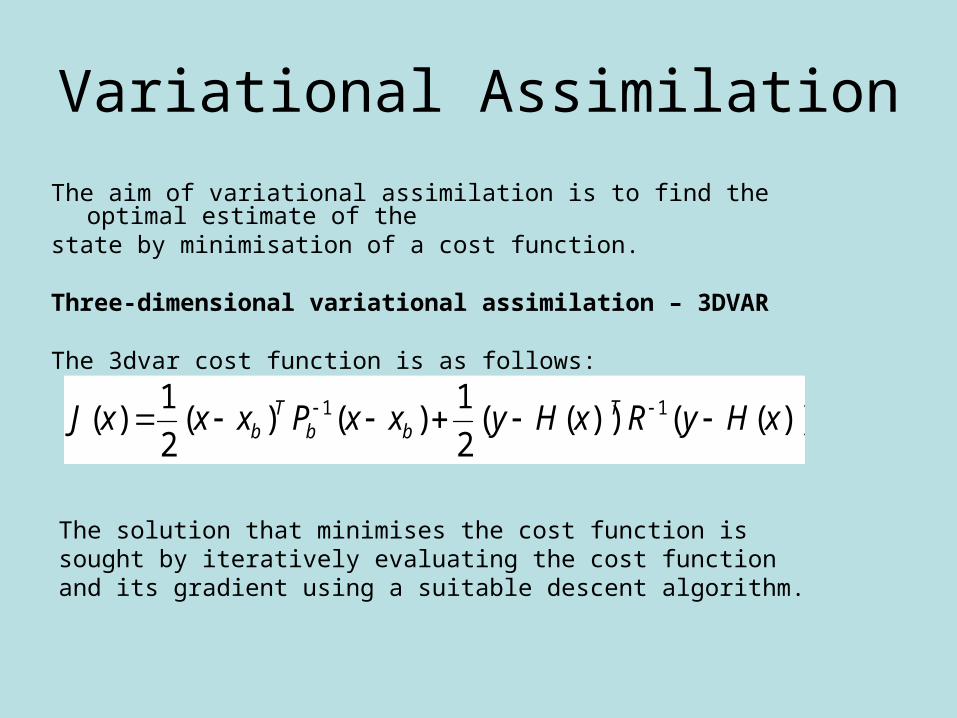
Variational Assimilation
The aim of variational assimilation is to find the optimal estimate of thestate by minimisation of a cost function.
Three-dimensional variational assimilation – 3DVAR
The 3dvar cost function is as follows:
))(())((2
1)()(
2
1)( 11 xHyRxHyxxPxxxJ T
bbT
b
The solution that minimises the cost function is sought by iteratively evaluating the cost function and its gradient using a suitable descent algorithm.

Ensemble Kalman Filter (EnKF)
• EnKF introduced by Evensen - to avoid the computational load associated with
• Sequential method where the error statistics are predicted using Monte Carlo or ensemble integration.
• An ensemble of model states in integrated forward in time and statistical information is calculated from the ensemble.
QMMPP Tak
bk 1

Assimilation with Ideal Data
Before assimilating radar data, thealgorithms have been validated usingsimulated data.
– SWAN is used to generate a ‘true’ state.– Model errors are assumed to be uniform over
the grid and equal to background uncertainty estimated from buoy data.
– Radar measurements are assumed to be available at all sites and errors also uniform.

Results for Simulated Case - 3DVAR

Results for Simulated Case - ENKF

Performance Error Statistics
Scheme MSE Hs MSE Tm
No Assimilation 5.26 * 10-3 6.57 * 10-2
3DVAR 2.679 * 10-3 2.209 * 10-2
Ens_OI 2.709 * 10-3 2.267 * 10-2
ENKF-16 1.05 * 10-3 2.45 * 10-2

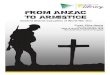
Assimilation with Real Data ENS-OI

Assimilation with Real Data EnKF

Assimilation of Band Parameters
• Assimilation of Hs and Tm in the following frequency bands.
Band 1 = 0.03Hz - 0.1Hz
Band 2 = 0.1Hz - 0.2Hz
Band 3 = 0.2Hz - 0.3Hz
Band 4 = 0.3Hz - 0.4Hz

Performance Error Statistics for Test Case Assimilation of Band Parameters
Scheme B1 Hs *10-3
B1 Tm *10-3
B2 Hs *10-3
B2 Tm *10-3
B3 Hs *10-3
B3 Tm *10-3
B4 Hs *10-3
B4 Tm *10-3
No Assimilation
0.16 0.18 11.9 12.0 5.8 4.5 16.3 0.16
3DVAR 0.16 0.13 6.8 6.7 3.6 2.5 8.2 0.17
Ens-OI 0.16 0.14 6.7 6.8 3.7 2.6 8.7 0.16
ENKF-16 0.02 0.15 0.7 3.5 3.1 1.8 3.6 0.29

Assimilation with Real Data 3DVAR

Assimilation with Real Data EnKF

Future Work
• Re-estimate model and radar errors to use in the assimilation schemes.
• Perform a probability sensitivity analysis on the model to find model sensitivities.
• Extend range of assimilated parameters e.g. by using partitioned directional spectra

Energy spectrum m2/Hz
Mean direction spectrum
Directional frequency spectrum m2/Hz/rad
OSCR
buoy
OSCR wind direction