Embed Size (px)
Citation preview

442.002 Signalverarbeitung 1UE — Assignment 4 — MCM 1
Signal Processing and Speech Communication Laboratory — Graz University of Technology
Assignment 4 — Most Common Mistakes
Aufgabe 4.1 (10 Punkte)
a) Einige verwendeten fur die Bewertung der Stabilitat die Bedingung fur Ubertragungs-funktionen im Laplace-Bereich (Realteile aller Polstellen negativ) statt im z-Bereich(ROC enthalt EHK).
b) Oft wurde nicht berucksichtigt, dass Zahlergrad von H(z) gleich dem Nennergrad vonH(z) ist und deshalb entweder vor der PBZ der Zahlergrad durch die Polynomdivision
(1) bzw. durch H(z)z
reduziert werden muss oder eine PBZ der Form (2) durchgefuhrtwerden muss. (
2z2 − 5
6z
):
(z2 − 5
6z +
1
6
)(1)
A
z − p1
+b
z − p2
+ C (2)
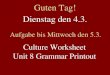
d) Hier wurde statt der eigentlichen DFII des Ofteren eine Abwandlung der DFI, bei derdie Verzogerungsglieder der einzelnen Ebenen in den Mittelzweig gezeichnet und zusam-mengefasst wurden, angegeben. Zur Wiederholung (s. Oppenheim A.V., Schafer R.W.:Discrete-Time Signal Processing; Chapter 6.3.1):
Fig. 1: Direktform 1 (links) und Direktform 2 (rechts)
Bei den Koeffizienten a und b ist auf die richtigen Vorzeichen zu achten (3):
H(z) =
∑Mk=0 bkz
−k
1 −∑N
k=1 akz−k
(3)

442.002 Signalverarbeitung 1UE — Assignment 4 — MCM 2
Aufgabe 4.2 (8 Punkte)
a) Bandbreite wurde oft falsch interpretiert. Abbildung 2 zeigt auf der linken Seite die kor-rekte Wahl der Bandbreite im Basisband und außerdem zwei haufig aufgetretene Fehler.
X (jc
X (jc
X (jc
Fig. 2: Korrekte und falsche Wahl der Bandbreite im Basisband
b) Hier wurde oft nicht ausreichend begrundet warum Aliasing auftreten kann oder auchnicht. Zunachst sollte bei der Argumentation unterschieden werden, ob man den FilterH(ejΘ) berucksichtigt oder nicht.
– Filter nicht vorhanden: Nach dem Upsampling treten sogenannte Images auf.Diese verursachen beim Downsampling Aliasing.
– Filter vorhanden: Angenommen diese Images werden gefiltert, dann wurde nachdem Downsampling genau der Grenzfall Θmax = π auftreten. Streng genommenist daher das Abtasttheorem auch hier verletzt. Die Argumentation, dass es einGrenzfall ist, ist aber auch gultig.
c) Wie schon erwahnt, treten beim Upsampling sogenannte Images auf (siehe Abbildung 3).Diese wurden in vielen Fallen vergessen.
j‘X (e U
2/2/2
Images
Fig. 3: DTFT von XU(ejθ)

442.002 Signalverarbeitung 1UE — Assignment 4 — MCM 3
Aufgabe 4.3 (7 Punkte)
Allgemein:
• Fehlende Achsbeschriftungen sind nicht tolerierbar und leider viel zu haufig aufgetreten.
• Fehlerhafte/ Nicht aussagekraftige Achsbeschriftungen (z.B. die Y-Achse mit ’Index ofSample’ zu beschriften) wurden auch mit Punktabzugen bewertet.
• Bitte auf die Lauffahigkeit des Codes achten! Pfade zum Abspeichern der Bilder auskom-mentieren, etc.
b) Das erzeugte Bild zeigt ein Zeit-Frequenz-Reprasentation des Signals x(t). Die x Achsereprasentiert also die Zeit, die Y-Achse wird als Frequenz interpretiert.
c) Hier sollte man die Funktionsweise der bereits implementierten Funktion approxMagSpectra
erklaren. Die Antwort ’approxMagSpectra approximiert das Amplitudenspektrum’ istalso nicht ausreichend. Wichtig war zu zeigen, dass man verstanden hat, was die Funk-tion macht. Jeden Schritt der Funktion in Textform niederzuschreiben ist also auch nichtgultig.
e) Der Haufigster Fehler war hier, dass bei der Berechnung des SNR nicht ftrue bzw. mtrue,sondern das Mischsignal x verwendet wurde. In unserem Fall kennen wir das reineNutzsignal (ftrue, mtrue), daher sollte auch dieses bei der Berechnung des Signal-Rausch-Abstandes verwendet werden.