Embed Size (px)
Citation preview

Žilinská univerzita v Žiline Elektrotechnická fakulta Katedra telekomunikácií
Asistované GPS
Peter Jašurek
2008

Asistované GPS
BAKALÁRSKA PRÁCA
Peter Jašurek
ŽILINSKÁ UNIVERZITA V ŽILINE Elektrotechnická fakulta Katedra telekomunikácií
Študijný odbor : Telekomunikácie
Vedúci bakalárskej práce : Ing. Peter Brída, PhD.
Stupeň kvalifikácie : bakalár (Bc.) Dátum odovzdania bakalárskej práce : 6.6 2008
ŽILINA 2008

Žilinská univerzita v Žiline Elektrotechnická fakul ta
KATEDRA TELEKOMUNIKÁCIÍ Univerzitná 1, 010 26 Žilina
Akademický rok 2007/2008
ZADANIE BAKALÁRSKEJ PRÁCE
Meno, priezvisko: Peter Jašurek Študijný odbor: Telekomunikácie Študijný program: Telekomunikácie Téma bakalárskej práce: Určovanie polohy pomocou systému
Assisted GPS (AGPS)
Pokyny pre vypracovanie bakalárskej práce:
Pokyny pre vypracovanie bakalárskej práce:
Vedúci bakalárskej práce: Ing. Peter Brída, PhD., Katedra telekomunikácií, EF, Žilinská univerzita v Žiline
Dátum odovzdania bakalárskej práce: 06. 06. 2008
prof. Ing. Milan Dado, PhD. vedúci katedry
Žilina 26. 10. 2007
1. Dôkladný rozbor systému AGPS (architektúra...).
2. Dôkladný rozbor potenciálnych koncových zariadení.

Abstrakt Bakalárska práca sa zaoberá opisom systému Asistovaného GPS (AGPS). V prvej
časti je opísaný samotný systém GPS, ktorý tvorí podstatnú zložku AGPS. V druhej časti
sa práca zaoberá rôznymi princípmi určovania polohy pomocou satelitných systémov. V
tretej časti je opísaná Celosvetová referenčná sieť, pomocou ktorej môžu byť dáta dodané
do AGPS prijímača a dve základné riešenia asistenčnej siete. V ďalšej časti je opísaná
architektúra SUPL systému ako aj príklad spojenia. V piatej časti sú uvedené niektoré
možné AGPS zariadenia. V poslednej časti sú uvedené výsledky vykonaných meraní.

Žilinská univerzita v Žiline, Elektrotechnická faku lta,
Katedra telekomunikácií
ANOTAČNÝ ZÁZNAM - BAKALÁRSKA PRÁCA
Priezvisko, meno: Jašurek Peter školský rok: 2007/2008
Názov práce: Asistované GPS
Počet strán: 41 Počet obrázkov: 13 Počet tabuliek: 4
Počet grafov: 0 Počet príloh: 3 Použitá lit.: 14
Anotácia:
Táto bakalárska práca popisuje systém nazývaný Asistované GPS (AGPS).
Zaoberá sa dvomi možnými riešeniami sietí na dodanie asistenčných dát do AGPS
prijímača pričom hlavný dôraz je kladený na User Plane riešenie nazvané SUPL, na jeho
funkciu, architektúru a poskytované služby.
Anotácia v cudzom jazyku:
This bachelor work describes system called Assisted GPS (AGPS). It is concerded
with two possible solutions of network for delivering the assistance data to AGPS
receiver while the main emphasis is based on User Plane solution called SUPL, on its
function, architecture and provided services.
Kľúčové slová: AGPS, GPS, TTFF, asistenčné dáta, WWRN, Control Plane, User Plane,
SUPL.
Vedúci práce: Ing. Peter Brída, PhD.
Recenzent práce: Ing. Peter Čepel, PhD.
Dátum odovzdania práce: 06.06.2008

Obsah I
OBSAH
Obsah ................................................................................................................... I
Zoznam obrázkov a tabuliek .......................................................................... III
Zoznam použitých skratiek..............................................................................IV
1 Úvod ..................................................................................................................1
2 Globálny polohový systém GPS......................................................................2
2.1 Kozmická zložka ........................................................................................2
2.2 Riadiaca zložka...........................................................................................3
2.3 Používateľská zložka ..................................................................................3
2.4 Služby GPS.................................................................................................4
2.4.1 PPS - Presná polohová služba .......................................................................4
2.4.2 SPS - Štandardná polohová služba ................................................................4
2.5 GPS Satelitné signály .................................................................................4
2.6 GPS dáta .....................................................................................................5
2.7 Čas potrebný pre prvé určenie polohy ........................................................7
3 Princípy určovania polohy..............................................................................8
3.1 DGPS ........................................................................................................10
3.2 Lokalizácia v GPS pomocou merania fázy nosného signálu....................11
3.3 EGNOS.....................................................................................................13
4 Asistovaný globálny polohový systém - AGPS............................................15
4.1 Koncept AGPS..........................................................................................15
4.2 Celosvetová referenčná sieť WWRN .......................................................16
4.3 Asistenčné dáta .........................................................................................18
4.4 Módy určenia polohy MS .........................................................................20
4.4.1 Určenie polohy sieťou ..................................................................................20
4.4.2 Určenie polohy v MS....................................................................................20
4.5 Control Plane a User Plane riešenia..........................................................21
Obsah II
4.5.1 Control Plane riešenie .................................................................................22
4.5.2 User Plane riešenie ......................................................................................23
5 Bezpečná User Plane lokalizácia SUPL .......................................................24
5.1 SUPL Služby ............................................................................................25
5.1.1 Skupina lokalizačných služieb SUPL ...........................................................26
5.1.2 Skupina lokalizačných funkcií SUPL...........................................................28
5.2 SUPL Systém a Subsystém.......................................................................29
5.2.1 SUPL Lokalizačná Platforma SLP...............................................................29
5.2.2 SUPL Lokalizačné Centrum SLC (SUPL Location Centre).........................29
5.2.3 SUPL Polohové Centrum SPC.....................................................................30
5.2.4 Terminál s podporou SUPL SET..................................................................30
5.2.5 Komunikačné mechanizmy a rozhrania zahrnuté v Lup-e ...........................30
5.3 Varianty spojení pri získavaní asistenčných dát:......................................31
5.3.1 Príklad úspešného spojenia – Proxy mód bez Roamingu.............................32
6 AGPS a GPS Zariadenia...............................................................................35
6.1 Hp hw 6515 - AGPS.................................................................................35
6.2 Mio P550 - GPS........................................................................................35
6.3 WondeX BT-100Y....................................................................................36
7 Merania...........................................................................................................37
7.1 Mestské prostredie ....................................................................................37
7.2 Predmestské prostredie .............................................................................38
7.3 Vidiecke prostredie...................................................................................38
8 Záver ...............................................................................................................40
9 Zoznam použitej literatúry ...........................................................................42
Prílohy.............................................................Chyba! Záložka nie je definovaná.

Zoznam obrázkov a tabuliek III
ZOZNAM OBRÁZKOV A TABULIEK
Obrázok 2.1 Štruktúra GPS..............................................................................................2
Obrázok 2.2 GPS Satelitné Signály..................................................................................5
Obrázok 2.3 Štruktúra GPS rámca ...................................................................................7
Obrázok 3.1 Vymedzenie dvoch možných polôh.............................................................8
Obrázok 3.2 Synchronizácia C/A kódov satelitu a prijímača...........................................9
Obrázok 3.3 Posunutie GPS signálov počas šírenia prostredím.....................................11
Obrázok 3.4 Určovanie polohy pomocou Merania fázy nosného signálu GPS .............12
Obrázok 4.1 Koncept AGPS...........................................................................................16
Obrázok 4.2 Celosvetová WWRN .................................................................................17
Obrázok 4.3 Architektúra Control Plane........................................................................22
Obrázok 4.4 Architektúra User Plane.............................................................................23
Obrázok 5.1 SUPL Architektúra ....................................................................................25
Obrázok 5.2 SUPL Úspešné spojenie.............................................................................32
Tabuľka 3.1 Porovnanie dosahovaných výsledkov v rôznych situáciách [3] ............10
Tabuľka 7.1 TTFF v mestskom prostredí.......................................................................37
Tabuľka 7.2 TTFF v predmestskom prostredí................................................................38
Tabuľka 7.3 TTFF vo vidieckom prostredí ....................................................................38

Zoznam použitých skratiek IV
ZOZNAM POUŽITÝCH SKRATIEK
3GPP The 3rd Generation PartnershipProject
Partnerský projekt tretej generácie
A-FLT Advanced Forward Link Trilateration
Pokročilá trilaterácia založená na meraní fázového rozdielu signálov
AGPS Assisted Global Position System Asistovaný globálny polohový systém
Cell ID Cell Identification Identifikácia bunky
Client-id Client identification Identifikácia klienta
DGPS Differential Global Position System
Diferenciálny globálny polohový systém
EGNOS European Geostationary Navigation Overlay Service
Európska geostacionárna polohová služba
E-OTD Enhanced Observed Time Difference
Rozšírené pozorovanie časového rozdielu
ESA European Space Agency Európska vesmírna agentúra
H-SLP Home - SUPL Location Platform
Domáca SUPL lokalizačná platforma
H-SPC Home - SUPL Positioning Center
Domáce SUPL polohové centrum
GLONASS Global Orbiting Navigation Satellite System
Globálny orbitálny polohový satelitný systém
GPRS General Packet Radio Service Všeobecná rádiová paketová služba
GPS Global Position System Globálny polohový systém
GSM Global System for Mobile Communication
Globálny systém pre mobilnú komunikáciu
IANA Internet Assigned Numbers Authority
Internetová štandardizačná organizácia
IMSO International Mobile Satellite Organization
Medzinárodná mobilná satelitná organizácia
Key ID Key Identification Identifikácia kľúča
LBS Location Based Service Lokalizačná služba
LDC Location Distribution Control Distribuované riadenie polohy
LMU Location Management Unit Lokalizačná jednotka

Zoznam použitých skratiek V
Location ID Location Identification Identifikácia polohy
LoS Line of Sight Neprerušený kontakt so satelitom
MAC Message Authentication Code Autentifikačný kód správy
MCS Master Control Station Hlavná riadiaca stanica
MLP Mobile Location Protocol Protokol mobilného určenia polohy
MLS Mobile Location Services Mobilné lokalizačné služby
MPC/GMLC Mobile Positioning Centre /Gateway Mobile Location Centre
Mobilné lokalizačné Centrum / Brána lokalizačného centra
MS Mobile Station Mobilná Stanica
MS-id Mobile Station-identification Identifikácia MS
NMR Network Measurement Report Správa sieťových meraní
OMA Open Mobile Alliance Štandardizačná organizácia
OTDOA Observed Time Difference of Arrival
Pozorovaný rozdiel časov príchodu
PAP Push Access Protocol Protokol prenosu Push správy
PDA Personal Digital Assistant Osobný Vreckový Počítač
POTAP Push Over-The-Air Protocol Protokol bezdrôtového prenosu Push správy
PPG Push Proxy Gateway Brána preklenutia PAP a POTAP
PPR Privacy Profile Register Register profilu súkromia
PPS Precise Positioning Service Presná polohová služba
PRN Pseudo Random Noise Pseudonáhodný šum
QoP Quality of Position Kvalita určenia polohy
RAM Random Access Memory Operačná pamäť
RIMS Ranging and Integrity Monitoring Stations
Stanice sledujúce integritu a rozsah
ROM Read Only Memory Permanentná pamäť
RRC Radio Resource Control „Control Plane“ signalizačný protokol tretej vrstvy

Zoznam použitých skratiek VI
RRLP Radio Resource LCS Protocol Protokol prenosu LCS dát medzi MS a SMLC
RTK Real Time Kinematic Meranie v reálnom čase
SADF SUPL Assistance Delivery Function
Funkcia SUPL doručenia asistenčných dát
SCF SUPL Charging Function Funcia SUPL Spoplatnenia
Session-id Session Identification Identifikátor spojenia
SET SUPL Enabled Terminal Termináli s podporou SUPL
SIF SUPL Initiation Function Funkcia SUPL inicializácie
SLC SUPL Location Centre SUPL lokalizačné centrum
SLP SUPL Location Platform SUPL lokalizačná platforma
SMLC Serving Mobile Location Centre Obsluhujúce mobilné lokalizačné centrum
SMS Short Message Service Služba krátkych správ
SMSC Short Message Service Center Centrum služby krátkych správ
SPC SUPL Positioning Center SUPL polohové centrum
SPCF SUPL Position Calculation Function
Funkcia SUPL určenia polohy
SPF SUPL Privacy Function Funkcia SUPL Súkromia
SPS Standard Positioning Service Štandardná polohová služba
SRRF SUPL Reference Retrieval Function
Funkcia SUPL získavania referenčných dát
SRSF SUPL Roaming Support Function
Funkcia SUPL podpory roamingu
SSF SUPL Security Function Funkcia SUPL zabezpečenia
SSH Secure Shell Protokol zabezpečenia kanála
SSMF SUPL Service Management Function
Funkcia SUPL riadenia polohy
SSPF SUPL SET Provisioning Function
Funkcia SUPL pridelenia adresy SET-u
SUPL Secure User Plane Location Bezpečná User Plane lokalizácia
TIA Telecommunications Industry Association
Asociácia pre Telekomunikácie

Zoznam použitých skratiek VII
ToA Time of Arrival Čas príchodu
TCP/IP Transmission Control Protocol Internet Protokol /
Protokol riadenia prenosu/ Internet protokol
TTFF Time To First Fix Čas do prvého určenia polohy
ULP User Plane Location Protocol User Plane lokalizačný protokol
UMTS Universal Mobile Telecommunication System
Univerzálny mobilný telekomunikačný systém
UTC Universal Time Coordinated Univerzálny koordinačný čas
V-SLP Visited-SUPL Location Platform
Hosťujúca SUPL lokalizačná platforma
V-SPC Visited - SUPL Positioning Center
Hosťujúce SUPL polohové centrum
WAP Wireless Aplication Protocol Bezdrôtový aplikačný protokol
WGS84 World Geodetic System 1984 Svetový geodetický systém
WWRN Worldwide Reference Network Celosvetová referenčná sieť

Úvod 1
1 ÚVOD
Asistovaný globálny polohový systém AGPS (Assisted Global Position System)
je technológiou významne zlepšujúcou doterajšie možnosti navigácie hlavne
v mestských častiach, kde je veľké krytie zo strany budov. AGPS technológia je
spojená hlavne s Lokalizačnou službou LBS (Location Based Service) v bunkových
sieťach. Odlišuje sa od doteraz používaného Globálneho polohového systému (Global
Position System) pridaním ďalšieho elementu pri určovaní polohy, ktorý sa nazýva
asistenčný server. Vďaka tomu dokáže AGPS poskytovať lokalizačné služby s väčšou
presnosťou ako je tomu u doterajšieho GPS systému. Významne zlepšuje čas potrebný
pre prvé určenie polohy TTFF (Time To First Fix). Využitím lokalizačnej služby
v bunkovej sieti dokáže určiť polohu v nepriaznivých podmienkach kedy klasické GPS
zlyháva.

Globálny polohový systém GPS 2
2 GLOBÁLNY POLOHOVÝ SYSTÉM GPS
Významnú časť AGPS systému tvorí samotný GPS systém. Systém tvorí
sústava 24 satelitov vysielajúcich navigačné signály, ktoré umožňujú mobilnej stanici
MS (Mobile Station) s GPS prijímačom určiť svoju polohu kedykoľvek a kdekoľvek na
zemi.
GPS systém tvoria tri zložky:
� Kozmická
� Riadiaca
� Používateľská
Obrázok 2.1 Štruktúra GPS
2.1 Kozmická zložka
Kozmická zložka GPS systému je tvorená sústavou 24 satelitov, z ktorých 21 je
aktívnych a 3 sú aktívne záložné. Satelity sú rozmiestnené na šiestich obežných
dráhach. „Obiehajú vo výške 20200 km so sklonom 55 stupňov k rovníku. Obežná
dráha družíc sa vzhľadom na povrch mení veľmi málo (o 4 minúty skôr každý deň)“[2].
Satelity obiehajú Zem s rýchlosťou 3,9 km za sekundu a rovnakú polohu nad daným
bodom zopakujú za 11 h 58 min. Každý satelit je vybavený prijímacou a vysielacou
anténou, atómovými hodinami, tryskami pohonu, akumulátormi ktoré majú k dispozícii

Globálny polohový systém GPS 3
solárne panely s plochou 7,2 m2 a radom ďalších prístrojov, ktoré slúžia pre navigáciu
alebo iné špecifické účely (napr. pre detekciu výbuchu jadrových náloží). Satelit
prijíma, spracováva, uchováva a vysiela informácie z/do pozemného riadiaceho centra,
na základe ktorých môže korigovať svoju dráhu tryskami, alebo informuje o svojom
stave riadiace centrum. Každý satelit váži približne 900 kg a cena jedného je
odhadovaná na 50 miliónov dolárov [3].
2.2 Riadiaca zložka
Riadiaca zložka je tvorená systémom hlavnej riadiacej stanice a štyroch
monitorovacích pozemných staníc umiestnených v rôznych častiach sveta. Hlavná
riadiaca stanica MCS (Master Control Station) je umiestnená blízko leteckej základne
Falcon v Colorade. Monitorovacie stanice pasívne sledujú satelity, prijímajú ich dáta, a
tieto predávajú MCS. Tu sú na základe prijatých dát vypočítané presné parametre
obežných dráh (efemeridy) a časové korekcie hodín pre jednotlivé satelity. Vysielacie
stanice potom tieto parametre minimálne raz denne odovzdajú satelitom. Tie potom
vysielajú pomocou rádiových signálov efemeridy svojich obežných dráh a presný čas
používateľom do GPS prijímačov [3].
2.3 Používateľská zložka
Používateľská zložka je tvorená GPS prijímačmi a používateľmi samotnými.
GPS prijímače môžu vykonávať na základe prijatých signálov zo satelitov predbežné
výpočty polohy, rýchlosti a času. Na určenie všetkých štyroch súradníc (X,Y,Z a čas)
je potrebné prijímať signály aspoň zo štyroch satelitov. Prijímače sa delia na
jednokanálové a viackanálové. Jednokanálové prijímače sú vybavené len jedným
vstupným kanálom, takže pri sledovaní viacerých satelitov musia postupne prepínať
tento vstupný kanál na jednotlivé satelity. Viackanálové prijímače majú dostatočný
počet vstupných kanálov, aby mohli súčasne sledovať všetky dostupné satelity a tým
zvyšovať presnosť výpočtu. Jednou zo základných úloh GPS je navigácia v
trojrozmernom priestore. Preto sú navigačné GPS prijímače určené práve pre lietadlá,
lode, pozemné vozidlá, a pre použitie jednotlivcami [3].

Globálny polohový systém GPS 4
2.4 Služby GPS
Používatelia GPS môžu používať dve rozdielne služby na určovanie polohy.
2.4.1 PPS - Presná polohová služba
Presná polohová služba (Precise Positioning Service). Túto službu môžu
používať len autorizovaní používatelia s kryptografickými zariadeniami a špeciálne
upravenými prijímačmi.
PPS predpokladaná presnosť:
� 22 metrov horizontálna presnosť,
� 27.7 metrov vertikálna presnosť,
� 200 nanosekúnd časová presnosť.
2.4.2 SPS - Štandardná polohová služba
Štandardná polohová služba (Standard Positioning Service). Táto služba je
dostupná pre komerčné využitie a podporuje ju väčšina GPS prijímačov. Služba je
bezplatná a bez obmedzenia.
SPS predpokladaná presnosť:
� 100 metrov horizontálna presnosť,
� 156 metrov vertikálna presnosť,
� 340 nanosekúnd časová presnosť.
2.5 GPS Satelitné signály
Satelity vysielajú dve mikrovlnné nosné vlny
� L1 s frekvenciou 1575,42 MHz prenáša navigačnú správu a SPS signál,
� L2 s frekvenciou 1227,60 MHz používaná na meranie ionosférického
oneskorenia v PPS prijímačoch.
� „Kód C/A moduluje fázu nosnej frekvencie L1. C/A kód opakuje 1 MHz-ový
pseudonáhodný kódový šum (Pseudo Random Noise). Tento šumový kód
moduluje nosný signál L1, rozširujúc šírku pásma na vyše 1 MHz. Kód C/A sa
opakuje každú milisekundu. Toto vyplýva z požadovaného zisku 30dB. Preto
GPS prijímače nepotrebujú veľké prijímacie antény. Každý satelit má iný C/A
kód. GPS satelity sú identifikované podľa ich Pseudonáhodného čísla,
jedinečného identifikátora pseudonáhodného kódového šumu. Táto technológia

Globálny polohový systém GPS 5
umožňuje identifikovať každý satelit, hoci všetky vysielajú na tej istej
frekvencii L1. Kód C/A sa používa pre civilné použitie SPS“ [2].
� P kód moduluje fázy oboch nosných frekvencií L1 a L2 ako je ukázané na
Obrázku 2.2. P kód je veľmi dlhý 10 MHz-ový PRN kód. P kód je v špeciálnom
móde šifrovaný na Y kód. „Y kód potrebuje klasifikovaný modul pre každý
prijímací kanál a je používaný iba autorizovanými používateľmi s
kryptografickými kľúčmi. P(Y) kód sa používa pre systém PPS“ [2].
� „Navigačná správa je taktiež modulovaná kódom L1 - C/A . Táto správa je
50Hz-ový signál pozostávajúci z dát, ktorý obsahuje informácie o dráhe satelitu,
hodinovej korekcii a ďalšie parametre“ [2].
Obrázok 2.2 GPS Satelitné Signály
2.6 GPS dáta
GPS navigačná správa pozostáva z dátových rámcov a subrámcov. Prvé tri
subrámce obsahujú orbitálne a časové dáta. Satelitné hodinové korekcie sú posielané
v prvom subrámci a presné satelitné orbitálne nastavenia (efemeridy) pre vysielanie
satelitu v druhom a treťom subrámci.
Subrámce štyri a päť sa používajú na prenos iných systémových dát. Celý set 25
rámcov (125 subrámcov) vytvára kompletnú navigačnú správu, ktorá sa vysiela
v intervale 12,5 minúty ako je znázornené na Obrázku 2.3.
� Dátové rámce (1500bit) sú posielané každých 30 sekúnd. Každý rámec
pozostáva z 5 subrámcov.
� Dátové subrámce (300 bitov prenášaných počas 6 sekúnd) obsahujú paritné bity,
ktoré umožňujú kontrolu dát a korekcie chýb.
Globálny polohový systém GPS 6
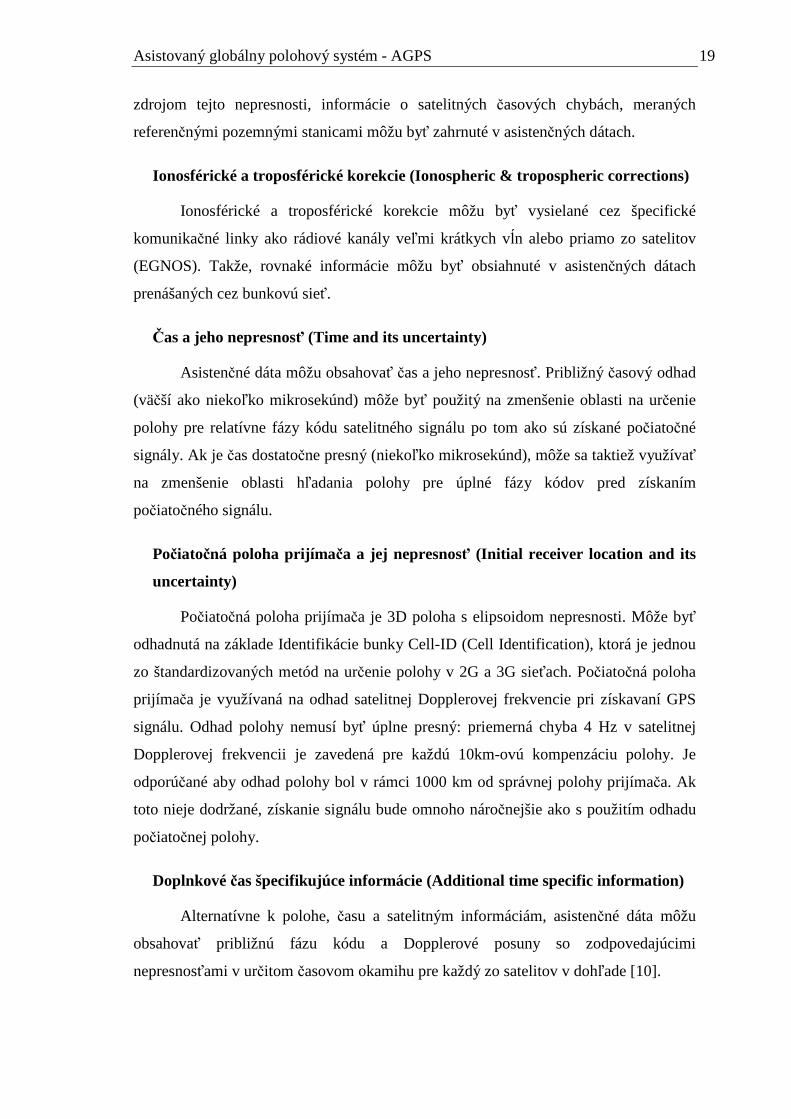
� Dáta časových parametrov popisujú satelitné hodiny a ich naviazanie na GPS
čas.
� Efemeridy popisujú dráhu satelitu pre časť jeho obežnej dráhy, takže budeme
presne vedieť kde sa satelit bude nachádzať o pár hodín. Obvykle, prijímač
zbiera nové efemeridy každú hodinu, ale môže používať aj staré dáta po štyri
hodiny bez vážnejších chýb. Efemeridy sú využívané s algoritmom, ktorý
vypočíta pozíciu satelitu pre akýkoľvek čas v rámci periódy obežnej dráhy
popísanej nastavenými efemeridami.
� Almanachy sú približné parametre obežnej dráhy pre všetky satelity. Desať-
parametrové almanachy popisujú obežné dráhy satelitu počas dlhšej časovej
periódy a nastavenie pre všetky satelity je vysielané každým satelitom počas
periódy 12,5 minúty (najmenej). Čas získania signálu pri štarte prijímača
(TTFF) môže byť významne zlepšený dostupnosťou súčasného almanachu.
Približné dáta obežných dráh sú používané na prenastavenie prijímača
s približnou polohou a nosnou Dopplerovou frekvenciou (zmena frekvencie
zapríčinená rýchlosťou zmeny pohybujúceho sa satelitu) každého satelitu
v zoskupení.
� Každý kompletný súbor satelitných dát obsahuje ionosférický model používaný
v prijímači, ktorý slúži na približné určenie fázového oneskorenia spôsobeného
ionosférou v akomkoľvek mieste a čase.
� Každý satelit posiela určité dáta, podľa ktorých je nastavovaný GPS čas z
Univerzálneho koordinačného času UTC (Universal Coordinated Time) čo je
vysoko presný štandard definovaný medzinárodným atómovým časom.
Korekcia času môže byť použitá prijímačom na nastavenie UTC s presnosťou
100 ns.
� posielajú sa ďalšie systémové parametre a flagy, ktoré charakterizujú detaily
systému[3].

Globálny polohový systém GPS 7
Obrázok 2.3 Štruktúra GPS rámca
GPS dáta ako almanach, efemeridy a daľšie popísané v tejto kapitole sú
podstatné z pohľadu AGPS, pretože asistenčné dáta prenášané z referenčnej siete do
MS obsahujú v podstate tie isté dáta ako kompletný GPS rámec.
2.7 Čas potrebný pre prvé určenie polohy
Čas potrebný pre prvé určenie polohy sa nazýva TTFF (Time To First Fix). Sú
tri štádiá, v ktorých sa môže nachádzať GPS prijímač pri zapnutí:
Studený štart
GPS prijímač zapneme. Po dlhom časovom intervale, kedy bol vypnutý a už
neobsahuje efemeridy ani almanach, nemá vedomosť o poslednej polohe, približnom
GPS čase alebo konštelácii satelitov. Studený štart predstavuje najdlhší čas pre prvú
lokalizáciu TTFF pre prijímač GPS. Môže trvať od jednej minúty až po niekoľko
minút.
Teplý štart
Nastane keď prijímač už má približný GPS čas, svoju poslednú polohu
a almanach. Efemeridy nie sú aktuálne alebo sú vymazané. Neaktuálne informácie sa
použijú ak sa prijímač snaží určiť polohu. Teplý štart trvá obvykle o 5 až 15 sekúnd
menej ako studený štart.
Horúci štart
Trvá väčšinou od 1 do 5 sekúnd. Prijímač musí vykonať aktualizáciu efemeríd
a všetkých ostatných parametrov, ktoré sú nevyhnutné.

Princípy určovania polohy 8
3 PRINCÍPY URČOVANIA POLOHY
GPS systém je založený na princípe trilaterácie. Trilaterácia vychádza
z predpokladu, že ak poznáme presnú polohu troch bodov v priestore vzhľadom k nám,
dokážeme určiť našu polohu. Potom miesto priesečníku vzdialeností týchto bodov od
nás určuje našu polohu. V GPS sa za tieto vzdialenosti považujú vzdialenosti od
satelitov.
GPS prijímač vypočíta 3D polohu (zemepisná šírka, dĺžka a nadmorská výška).
Vypočítaná vzdialenosť medzi GPS prijímačom a satelitom je polomer gule, ktorej
stredom je satelit. V mieste, kde sa tieto pomyselné gule pretnú leží lolalizovaný GPS
prijímač. Získaním dát z troch satelitov vedie k určeniu dvoch miest kde sa gule
pretínajú ako ukazuje obrázok 3.1.
Obrázok 3.1 Vymedzenie dvoch možných polôh
Preto musíme urobiť ešte štvrté meranie. Štvrtým parametrom potrebným
k výpočtu polohy je čas tD, za ktorý prejde signál zo satelitu do prijímača. Získame ho
jednoduchým výpočtom :
Dtcd .= (3.1)
Pričom rýchlosť šírenia elektromagnetického lúča c je približne 300 000 km/s.
Problém je, že signál zo satelitu nemá synchronizovanú časovú základňu so signálom v
prijímači. Preto je meranie času šírenia signálu dosiahnuté synchronizovaním C/A
kódu (alebo P(Y) kódu) prijímača vzhľadom k C/A kódu prijatého zo satelitu. Toto
prispôsobenie sa vykonáva v zariadení nazývanom korelátor GPS. Fázová poloha kódu
C/A sa v prijímači mení, dokiaľ autokorelácia nedáva maximum. Časový posun, ktorý
Dve možné polohy
používateľa

Princípy určovania polohy 9
je pri tom potrebný sa používa na určenie času šírenia signálu od satelitu k prijímaču
GPS ako je ukázané na Obrázku 3.2.
Obrázok 3.2 Synchronizácia C/A kódov satelitu a prijímača
Keďže hodiny prijímača nemajú rovnakú presnosť ako atómové hodiny
v satelite (presnosť väčšia ako 10-13), meraný čas je zaťažený chybou δ, ktorú musíme
zahrnúť do výpočtu polohy. Definujme polohu prijímača na zemi, ktorú chceme určiť v
3D priestore súradnicami X, Y, Z. Označme vzdialenosť od satelitu číslo S ako DS,
ktorú je možné zistiť z doby šírenia signálu ∆tS od satelitu k prijímaču a z rýchlosti
svetla c :
δ..)()()( 222 ctcZZYYXXD SSSSS +∆=−+−+−=
kde XS, YS, ZS sú parametre satelitu určujúce jeho polohu. Pre polohu prijímača
dostaneme štyri neznáme X, Y, Z a δ. Na základe meraní zo štyroch rôznych satelitov
môže prijímač vyriešením príslušnej sústavy lineárnych rovníc vypočítať požadované
štyri neznáme [2].

Princípy určovania polohy 10
3.1 DGPS
Diferenciálny globálny polohový systém (Differential Global Position System)
bol navrhnutý na zvýšenie presnosti, ktorú dosahuje GPS prijímač. Faktory nepresnosti
ktoré musí GPS prijímač riešiť sú najmä časové oneskorenie spôsobené vrstvami
atmosféry, hodiny v satelite a v prijímači. Dokáže to pomocou merania časovej
nepresnosti všetkých satelitov v dosahu a vysielaním tejto informácie všetkým DGPS
prijímačom v okolí. DGPS sa spolieha na fakt, že satelitný signál má rovnaké časové
oneskorenie pre referenčný prijímač ako pre všetky ostatné DGPS prijímače v dosahu
niekoľkých stoviek kilometrov.
Takáto oblasť je malá z pohľadu šírenia satelitného signálu, takže časové
oneskorenie je rovnaké v celej oblasti. Referenčný prijímač vypočíta časové
oneskorenie použitím „spätného“ prepočtu.
„Porovnávaním jeho polohy vypočítanej zo satelitných dát s jeho presne
zameranou polohou na Zemi, môže referenčný prijímač zisťovať rozdiel medzi
nameranou a skutočnou vzdialenosťou od všetkých viditeľných satelitov“ [2].
Referenčný prijímač vysiela správu s presným časovým oneskorením známym
komunikačným kanálom. DGPS prijímač prijíme správu a na základe známeho
časového oneskorenia v oblasti dokáže zlepšiť presnosť určovania svojej polohy.
Jediný problém DGPS riešenia je, že referenčný prijímač môže pracovať iba pre
konkrétnu oblasť takže je potrebné veľké množstvo referenčných prijímačov na
pokrytie veľkého územia čoho dôsledkom je vyššia cena riešenia DGPS, ale zároveň aj
lepšia presnosť ako môžeme vidieť v tabuľke 3.1 [1].
Tabuľka 3.1 Porovnanie dosahovaných výsledkov v rôznych situáciách [3] GPS SIGNÁLY
GPS PRÍSTUP ODHADOVANÁ PRESNOSŤ
ODHADOVANÁ CENA PRIJÍMA ČA L1 C/A
KÓD L1 P KÓD
L1 NOSNÁ
L2 P KÓD
L2 Y KÓD
SPS NAVIGÁCIA 100m 100€ X
SPS DIFERENCIÁLNA < 30 km 10m 500€ X
SPS DIFERENCIÁLNA < 30 km 1m 500€ X
PPS NAVIGÁCIA 10m 1000€ X X X
ANTI-SPOOFING NAVIGÁCIA 10m 2000€ X X X X X
L1 MERANIE FÁZY NOSNÉHO SIGNÁLU 0,1m 1000€ X X
L1 L2 MERANIE FÁZY NOSNÉHO SIGNÁLU 0,01m 1500€ X X X X

Princípy určovania polohy 11
3.2 Lokalizácia v GPS pomocou merania fázy nosného signálu
Meranie fázy nosného GPS signálu vyvolalo revolúciu v kryptografických
meraniach. Poloha môže byť určená na veľké vzdialenosti od referenčného bodu bez
akýchkoľvek prechodných bodov. Takéto využitie GPS systému vyžaduje špeciálne
vybavený prijímač schopný merať fázu nosného signálu.
Pri meraní fázy nosného signálu sú využívané nosné signály L1 a L2. L1
prenáša cykly s vlnovou dĺžkou 19 cm.
V podstate táto metóda meria presný počet periód nosného signálu medzi
satelitom a prijímačom ako ukazuje Obrázok 3.3. Problémom je, že cykly nosného
signálu sú rovnaké a preto je ich ťažké rozoznať a spočítať. Každý cyklus vyzerá ako
všetky ostatné. Na druhej strane pseudonáhodný kód je zámerne zložitý aby bolo ľahšie
rozoznať jednotlivé cykly.
Obrázok 3.3 Posunutie GPS signálov počas šírenia prostredím
Najmenej dva prijímače sledujú nosné signály v rovnakom čase. Rozdiely v
ionosférickom oneskorení musia byť dosť malé na zabezpečenie, že periódy nosnej
vlny sú správne spočítané. Takýto princíp väčšinou vyžaduje aby boli dva prijímače
vzdialené od seba približne 30 kilometrov. Fáza nosného signálu je sledovaná na oboch
prijímačoch a zmeny fázy sú zaznamenané v oboch prijímačoch počas sledovania
signálu.

Princípy určovania polohy 12
Oba prijímače, referenčný aj vzdialený, musia byť tak blízko, aby ionosférické
oneskorenie nebolo väčšie ako vlnová dĺžka nosného signálu. Použitím L1-L2
ionosférických meraní a dlhých priemerných časov meraní, môžu byť vzájomné polohy
nepohyblivých strán určené cez základňové čiary dlhé stovky kilometrov. Rozdiely vo
fáze v dvoch prijímačoch sú obmedzené použitím programu na rozčlenenie na tri
pozičné úrovne medzi referenčnou stanicou a vzdialeným prijímačom. Pri meraní fázy
nosného signálu je možné robiť vysoko presné meranie s centimetrovou presnosťou .
Problémy vyplývajú zo sledovania fázy nosného signálu, keď dochádza k rušeniu
signálu alebo keď sa prijímač pohybuje.
� Dva prijímače a jeden satelit môžu vytvoriť jeden rozdiel vo fáze.
� Dva prijímače a dva satelity počas prenosu poskytnú dvojitý rozdiel vo fáze.
Spracované statické meranie fázy nosného signálu poskytuje určenie polohy
s presnosťou 1 až 5 cm vo vzdialenosti 30 km od referenčného prijímača s časom
merania 15 minút pre krátku základňovú čiaru (10km) a 1 hodinu pre dlhú základňovú
čiaru (30km).Rýchle statické meranie fázy nosného signálu poskytuje určenie polohy
s presnosťou 4 až 10 cm so základňovou čiarou 1km a nahrávacím časom 15 minút.
RTK (Real Time Kinematic) meracie techniky v reálnom čase poskytujú
merania s presnosťou 1cm a so základňovou čiarou 10km sledujúcou 5 a viac satelitov
a rádiové spojenie v reálnom čase medzi referenčným a vzdialeným prijímačom [3].
Obrázok 3.4 Určovanie polohy pomocou Merania fázy nosného signálu GPS

Princípy určovania polohy 13
3.3 EGNOS
Európska geostacionárna polohová služba EGNOS (European Geostationary
Navigation Overlay Service) je prvý Európsky projekt satelitnej navigácie a je
predchodca kompletného navigačného systému GALILEO. Rozširuje dva v súčasnosti
používané systémy GPS a Globálny orbitálny polohový satelitný systém GLONASS
(Global Orbiting Navigation Satellite System), ktorý prevádzkuje Rusko. Prispôsobuje
ich pre pužitie v situáciách, kritických z hľadiska bezpečnosti a presnosti navigácie ako
navigácia lodí cez úzke kanály alebo v lietadlách.
EGNOS dovoľuje používateľovi v Európe určiť svoju polohu s presnosťou na 2
metre oproti 20 metrom pri GPS navigácii. Informuje používateľov o chybách pri
meraniach polohy a varuje o narušení satelitného signálu počas menej ako 6 sekúnd.
EGNOS poskytuje dáta potrebné pre použitie navigačných signálov z GPS
a GLONASS satelitov v prípadoch kedy by mohla byť ohrozená bezpečnosť ľudí.
Pozostáva z troch geostacionárnych satelitov a zložitej siete pozemných staníc.
Tri satelity vysielajú signály podobné tým vysielaným GPS a GLONASS satelitmi.
Tieto signály majú okrem využitia na lokalizáciu polohy používateľa poskytovať
informácie o presnosti merania polohy doručeného GPS a GLONASSom, takže napr.
pilot môže odhadnúť či je poloha natoľko presná, aby sa na ňu mohol spoľahnúť.
Signály obsahujú presnú polohu každého GPS a GLONASS satelitu, presnosť
atómových hodín nachádzajúcich sa v satelite a rušenie v ionosfére, ktoré môže
ovplyvniť presnosť meraní polohy. EGNOS prijímač, ktorý je prepracovanejší ako
klasický satelitný navigačný prijímač, dekóduje signál pre získanie presnejšej polohy
ako je možné získať pri samotných GPS alebo GLONASS, a presný odhad chýb.
EGNOS signál je prenášaný tromi geostacionárnymi satelitmi: satelitmi
Medzinárodnej mobilnej satelitnej organizácie IMSO (International Mobile Satellite
Organization). Jeden prelieta ponad východnú časť Atlantického oceánu, ďalší ponad
Indický oceán a satelit Európskej Vesmírnej Agentúry ESA (European Space Agency)
Artemis ponad Afriku.
Pozemnú sieť tvorí 34 Staníc sledujúcich integritu a rozsah RIMS (Ranging and
Integrity Monitoring Stations), štyri hlavné riadiace strediská a šesť vysielacích staníc.
RIMS merajú polohu každého EGNOS satelitu a porovnávajú presné merania
polohy každého GPS a GLONASS satelitu s meraniami obdržanými signálmi zo

Princípy určovania polohy 14
satelitu. RIMS potom posielajú tieto dáta do hlavného riadiaceho strediska cez
komunikačnú sieť vybudovanú na tento účel.
Hlavné riadiace strediská udávajú presnosť GPS a GLONASS signálov
prijatých v každej stanici a udávajú aj nepresnosť závislú na rušení v ionosfére. Všetky
poškodené dáta sú potom začlenené do signálu a odoslané cez bezpečnú komunikačnú
linku do vysielacích staníc, ktoré sú rozmiestnené po Európe. Vysielacie stanice
vysielajú signál do troch EGNOSS satelitov, ktoré ho prenášajú na príjem GPS
a GLONASS používateľom s EGNOS prijímačom.
EGNOS systém je značne nad dimenzovaný, takže služba je garantovaná takmer
nepretržite. Vždy iba jedna riadiaca stanica zastáva činnosť hlavnej riadiacej stanice.
Ostatné sú v „spiacom“ režime aby mohli nahradiť prvú keby z nejakého dôvodu
zlyhala. Taktiež sú využívané len tri vysielacie stanice, každá pre jeden satelit, ale
ďalšie tri sú záložné pre prípad zlyhania pôvodných staníc [5].

Asistovaný globálny polohový systém - AGPS 15
4 ASISTOVANÝ GLOBÁLNY POLOHOVÝ SYSTÉM - AGPS
Medzi hlavné problémy určovania polohy pomocou GPS patrí TTFF. Je to čas
potrebný pre prvé určenie polohy, ktorý závisí od citlivosti prijímača, počtu viditeľných
satelitov, úrovne signálu jednotlivých satelitov a na konštelácii satelitov na oblohe. Pri
nepriaznivých podmienkach môže prepočítanie pozície trvať aj niekoľko minút čo nie
je akceptovateľné pre LBS [8].
Obmedzenia GPS
Klasický GPS prijímač musí mať prístup k „otvorenej oblohe“ – Neprerušený
kontakt so satelitom LoS (Line of Sight). Toto sťažuje situáciu napr. pri navigácii v
budovách, tuneloch alebo pri krádeži auta a pod. (v podzemných garážach, metre
a všade kde je zastretá obloha).
AGPS
AGPS kombinuje schopnosti určovania polohy klasického GPS s technológiou
mobilných sietí pre poskytnutie AGPS používateľom možnosť určiť svoju polohu
a reagovať na ňu v reálnom čase.
S AGPS technológiou získava mobilná stanica MS informácie zo satelitu cez
mobilnú sieť využívajúc rádiové spojenie medzi základňovými stanicami a MS na
vysielanie asistenčných dát rádovo za sekundy, šetriac pritom čas a batériu. TTFF je
teda do značnej miery eliminovaný v AGPS aplikáciách.
4.1 Koncept AGPS
Technológia konceptu AGPS je zobrazená na obrázku 4.1. MS má integrovaný
GPS prijímač, ktorý prijíma signály zo satelitov. AGPS server obsahuje referenčný
GPS prijímač, ktorý má priamy výhľad na oblohu a sleduje tie isté satelity ako mobilná
stanica. Každý AGPS server má kontrolu nad viacerými základňovými stanicami a má
presné informácie o GPS signáloch dostupných pre mobilnú stanicu v bunkách, ktoré
kontroluje. AGPS server je pripojený na rádiotelefónnu ústredňu[1].

Asistovaný globálny polohový systém - AGPS 16
Obrázok 4.1 Koncept AGPS
4.2 Celosvetová referenčná sieť WWRN
Výkon AGPS zariadenia pri určovaní polohy závisí od dát z určitého počtu
satelitov zahrnutých v asistenčných dátach, ktoré pre MS poskytuje Celosvetová
referenčná sieť WWRN (Worldwide Reference Network). Obe riešenia AGPS systému
ako aj Bezpečná User Plane Lokalizácia SUPL (Secure User Plane Location) popísané
v kapitole 4.5 a 5 sú s WWRN kompatibilné.
WWRN je globálna sieť referenčných staníc, ktoré nepretržite sledujú všetky
GPS satelity a odosielajú takto získané dáta do redundantných dátových centier. Dáta
pre úplnú GPS konšteláciu sú vysielané zo strany dátových centier do všetkých SUPL
lokalizačných platforiem SLP (SUPL Location Platform), dovoľujúc každej jednej SLP
poskytovanie asistenčných dát alebo určenie polohy mobilného GPS zariadenia
kdekoľvek na svete. Konektivita s WWRN je zabezpečená buď cez virtuálne privátne
siete, kanálom zabezpečeným Protokolom SSH (Secure Shell) cez verejný internet
alebo privátne frame relay siete pre väčšie komerčné systémy. WWRN je kľúčový
zdroj pre mobilné služby na určenie polohy využívajúce AGPS, nie iba preto, že
oslobodzuje operátorov mobilných sietí od nutnosti monitorovať a spravovať GPS
referenčnú sieť, ale taktiež ponúka výhody pre AGPS výkonnosť, ktoré by regionálna
referenčná sieť nemohla splniť.

Asistovaný globálny polohový systém - AGPS 17
Obrázok 4.2 Celosvetová WWRN
AGPS server obsahuje tzv. celosvetový model terénnych nerovností, ktorý
umožňuje určenie polohy s menším množstvom satelitných meraní, taktiež zvyšuje
presnosť najmä v hornatom teréne. Model obsahuje viac ako miliardu súradníc
vzťahujúcich sa k Svetovému geodetickému systému WGS84 s presnosťou na 18
výškových metrov. Vďaka optimálizácii platformy AGPS serveru sú doplnkové
asistenčné dáta modelu prenesené rádovo za milisekundy.
S patentovanými algoritmami pre spracovanie meraní pseudovzdialeností
dokáže AGPS server určiť polohu aj bez presných GPS časových vzoriek. Táto
vlastnosť umožňuje jeho prevádzku aj v sieťach ako Globálny systém pre mobilnú
komunikáciu GSM (Global System for Mobile Communication) alebo Univerzálny
mobilný telekomunikačný systém UMTS (Universal Mobile Telecommunication
System), ktoré niesú synchronizované GPS časom. Taktiež eliminuje potrebu
Lokalizačných jednotiek (Location Management Unit), ktoré dodávajú GPS
synchronizáciu do základňových staníc[9].

Asistovaný globálny polohový systém - AGPS 18
4.3 Asistenčné dáta
Asistenčné dáta môžu, v závislosti na možnostiach asistenčného servera a AGPS
prijímača, obsahovať rôzne elementy ako:
Efemeridy
GPS prijímač potrebuje na určenie svojej 3D polohy poznať polohu najmenej
štyroch satelitov a taktiež Čas príchodu ToA (Time of Arrival) dekódovaného signálu
vysielaného z každého zo štyroch satelitov. Obvykle, informácie o polohách satelitov
sú získavame priamo z GPS satelitov. Avšak nahrávanie efemeríd z GPS signálov je
časovo náročné (nahrávacia rýchlosť je iba 50bps). V prostredí so slabým príjmom
signálu (mestské "kaňony"), tieto dáta môžu byť úplne nedostupné. Preto využitím
AGPS môžu byť dáta prijaté vzdialeným (referenčným) prijímačom, ktorý má priamy
výhľad (LoS) na tie isté satelity ako GPS prijímač a môžu byť dodané do AGPS
prijímača cez bezdrôtovú sieť. Efemeridy sú platné len pre dobu viditeľnosti každého
satelitu. Táto doba (čas) sú približne 4 hodiny za predpokladu, že prijímač je nehybný a
satelit práve stúpajúci nad horizont. Efemeridy môžu byť nahraté pre dlhšiu časovú
periódu.
Almanach
Almanach obsahuje približné polohy satelitov (zjednodušené efemeridy).
Almanachy niesú dosť presné pre navigáciu, ale užitočné pre urýchlenie vyhľadania
satelitu na získanie fixu polohy. Almanachy sú používané v odhadovaní Dopplerovho
posunu každého satelitu. Doba platnosti almanachu je omnoho dlhšia ako doba
platnosti presných efemeríd, zvyčajne týždne.
Stavové dáta satelitu (Satellite health data)
V súvislosti s určením polohy satelitu (efemeridy, almanach), asistenčné dáta
môžu obsahovať stavové dáta satelitu zahrňujúce správy o plánovaných údržbách
satelitu, výpadkoch a zlyhaniach satelitu.
Chyby satelitných hodín (Satellite clock errors)
GPS satelity majú veľmi presné atómové hodiny. Napriek veľkej presnosti,
posun týchto hodín zapríčiňuje zhoršenie presnosti určenia polohy. V súvislosti so
Asistovaný globálny polohový systém - AGPS 19
zdrojom tejto nepresnosti, informácie o satelitných časových chybách, meraných
referenčnými pozemnými stanicami môžu byť zahrnuté v asistenčných dátach.
Ionosférické a troposférické korekcie (Ionospheric & tropospheric corrections)
Ionosférické a troposférické korekcie môžu byť vysielané cez špecifické
komunikačné linky ako rádiové kanály veľmi krátkych vĺn alebo priamo zo satelitov
(EGNOS). Takže, rovnaké informácie môžu byť obsiahnuté v asistenčných dátach
prenášaných cez bunkovú sieť.
Čas a jeho nepresnosť (Time and its uncertainty)
Asistenčné dáta môžu obsahovať čas a jeho nepresnosť. Približný časový odhad
(väčší ako niekoľko mikrosekúnd) môže byť použitý na zmenšenie oblasti na určenie
polohy pre relatívne fázy kódu satelitného signálu po tom ako sú získané počiatočné
signály. Ak je čas dostatočne presný (niekoľko mikrosekúnd), môže sa taktiež využívať
na zmenšenie oblasti hľadania polohy pre úplné fázy kódov pred získaním
počiatočného signálu.
Počiatočná poloha prijímača a jej nepresnosť (Initial receiver location and its
uncertainty)
Počiatočná poloha prijímača je 3D poloha s elipsoidom nepresnosti. Môže byť
odhadnutá na základe Identifikácie bunky Cell-ID (Cell Identification), ktorá je jednou
zo štandardizovaných metód na určenie polohy v 2G a 3G sieťach. Počiatočná poloha
prijímača je využívaná na odhad satelitnej Dopplerovej frekvencie pri získavaní GPS
signálu. Odhad polohy nemusí byť úplne presný: priemerná chyba 4 Hz v satelitnej
Dopplerovej frekvencii je zavedená pre každú 10km-ovú kompenzáciu polohy. Je
odporúčané aby odhad polohy bol v rámci 1000 km od správnej polohy prijímača. Ak
toto nieje dodržané, získanie signálu bude omnoho náročnejšie ako s použitím odhadu
počiatočnej polohy.
Doplnkové čas špecifikujúce informácie (Additional time specific information)
Alternatívne k polohe, času a satelitným informáciám, asistenčné dáta môžu
obsahovať približnú fázu kódu a Dopplerové posuny so zodpovedajúcimi
nepresnosťami v určitom časovom okamihu pre každý zo satelitov v dohľade [10].

Asistovaný globálny polohový systém - AGPS 20
4.4 Módy určenia polohy MS
AGPS systém môže pracovať v dvoch módoch: určenie polohy v MS kde je
poloha určená v MS odoslaná do bunkovej siete. Pri určení polohy sieťou získava MS
GPS signál GPS koreláciou lokálne generovaného pseudonáhodného kódu s prijatým
GPS signálom a určuje časovo vzorkované pseudovzdialenosti. Tieto sú vysielané do
bunkovej siete, ktorá vykonáva výpočet polohy MS.
Informačné elementy prenášané medzi AGPS serverom do MS a naopak sa v
každom móde odlišujú.
4.4.1 Určenie polohy sieťou
Pre porovnanie oboch módov určenia polohy MS sú podstatné správy prenášané
medzi MS a AGPS serverom ako aj ich množstvo a veľkosť.
Správy z MS do AGPS servera
� požiadavka polohy,
� odhadovaná poloha MS,
� časovo vzorkované pseudovzdialenosti.
Správy z AGPS servera do MS
� zoznam viditeľných satelitov,
� GPS referenčný čas,
� efemeridy a približné polohy MS, Dopplerova a kódová fáza signálu satelitov v
priamom dohľade.
Riešenie určenia polohy sieťou vyžaduje krátky čas prijatia dát zo satelitu a
používa sieťové prostriedky na určenie polohy. Toto urýchli proces určenia polohy bez
zaťaženia siete a taktiež nevyžaduje dodatočnú výpočtovú energiu v MS. Nevýhodou
riešenia je krátka doba platnosti asistenčných dát.
4.4.2 Určenie polohy v MS
Správy z MS do AGPS servera
� požiadavka na určenie polohy,
� odhadovaná poloha MS,
� poloha určená v MS.

Asistovaný globálny polohový systém - AGPS 21
Správy z AGPS servera do MS
� zoznam viditeľných satelitov,
� fáza Dopplerovho posunu a šifrovaného kódu satelitov v priamom dohľade,
� efemeridy, platné pre 2 až 4 hodiny s predĺžením platnosti na celú dobu
viditeľnosti satelita (12 hodín),
� korekcie DGPS,
� GPS referenčný čas,
� integrita dát v reálnom čase.
Pri určení polohy v MS je potrebné dostatočne dimenzovať jeho pamäťové
kapacity - Operačnej pamäti RAM (Random Access Memory) a Permanentnej pamäti
ROM (Read Only Memory) z dôvodu zvýšených požiadaviek na výpočtový výkon.
Ďalšou nevýhodou je relatívne dlhý čas prijatia asistenčných dát zo satelitu, ktorý
spomaľuje výpočet polohy a zaťažuje sieť.
Jedna z výhod riešenia je, že MS môže byť použitá ako výlučne GPS prijímač.
Toto môže byť užitočné pri využití GPS aplikácií v MS. Ďalšie výhody sú relatívne
krátky čas prijatia dát zo satelitu a platnosť väčšiny asistenčných dát 2 až 4 hodiny.
Je dôležité povedať, že informácie prenášané medzi MS a AGPS serverom
môžu a nemusia obsahovať správy, ktoré boli spomenuté vyššie[1].
4.5 „Control Plane“ a „User Plane“ riešenia
Existujú dve riešenia vytvorenia AGPS siete určenej na poskytovanie
asistenčných dát:
� „Control Plane“
� „User Plane“.

Asistovaný globálny polohový systém - AGPS 22
4.5.1 „Control Plane“ riešenie
Obrázok 4.3 Architektúra „Control Plane“
Keď je AGPS realizované pomocou „Control Plane“ riešenia, jednotka merania
polohy extrahuje informácie o polohe so signalizačnými meraniami z MS, z
niekoľkými základňovými vys./prijímacích stanicami a z Obsluhujúceho mobilného
lokalizačného centra SMLC (Serving Mobile Location Centre). Mobilné lokalizačné
centrum/Brána mobilného lokalizačného centra MPC/GMLC (Mobile Positioning
Centre /Gateway Mobile Location Centre) zbiera tieto polohové dáta a dáta z AGPS
serveru niekoľkými referenčnými GPS prijímačmi a vysiela ich ako asistenčné dáta do
MS, umožňujúc mu presne určiť polohu. LBS môže požiadať o tieto dáta na určenie
polohy cez GMLC bránu. S „Control Plane“ riešením je možné určovať polohu MS v
oboch módoch (v sieti aj v MS). Inštalácia AGPS založeného na „Control Plane“ je
zložitá a finančne nákladná, pretože je k nej potrebné dodatočné technické vybavenie
na ovládanie zložitých protokolov.
Štandardizované „Control Plane“ riešenie je definované pre 2G aj 3G bunkové
siete. Základná architektúra pozostáva z SMLC, MPC/GMLC, a aplikácií na určenie
polohy. MPC/GMLC pracuje ako brána pre lokalizačné služby, ktorá sa nachádza
mimo bunkovej siete. SMLC udržiava prenosové kanály na prenos polohových

Asistovaný globálny polohový systém - AGPS 23
informácií pre každý z terminálov a prenáša informácie z MPC/GMLC do terminálu a
naopak. Administratívne funkcie ako autentifikácia, spoplatnenie atď. sú taktiež
spravované v MPC/GMLC. Špecifikácie pre Protokol prenosu LCS dát (lokalizačných
dát) RRLP (Radio Resource LCS Protocol) v 2G je v špecifikácii 3GPP TS 44.031 a
špecifikácia pre „Control Plane“ signalizačný protokol tretej vrstvy RRC (Radio
Resource Control) v 3G je v špecifikácii 3GPP TS 25.331[10].
4.5.2 „User Plane“ riešenie
Obrázok 4.4 Architektúra „User Plane“
Tento spôsob prístupu k asistenčným dátam je omnoho menej finančne náročný
ako prístup „Control Plane“, pretože mobilná sieť nevyžaduje dodatočné technické
prostriedky. Taktiež je vhodný pre všetky mobilné štandardy.

Bezpečná User Plane lokalizácia SUPL 24
5 BEZPEČNÁ USER PLANE LOKALIZÁCIA SUPL
Štandardizované „User Plane“ riešenie je definované Štandardizačnou
organizáciou OMA (Open Mobile Alliance) ako OMA SUPL v1.0 špecifikácia.
Základnou myšlienkou je vytvoriť bezpečné spojenie Protokolom riadenia prenosu/
Internet protokolom TCP/IP (Transmission Control Protocol/Internet Protokol) medzi
Terminálom s podporou SUPL, ktorý sa nazýva SET (SUPL Enabled Terminal) priamo
so SLP. SET a SLP si vymieňajú správy prostredníctvom User Plane lokalizačného
protokolu ULP (UserPlane Location Protocol), ktorý je dekódovaný v ASN.1 formáte.
Táto komunikácia je znázornené na Obrázku 6.1. Transportná vrstva pre ULP je
TCP/IP, s výnimkou SUPL inicializačnej správy SIF (SUPL Initiation Function ). SIF
je vyslaná zo SUPL lokalizačného centra SLC (SUPL Location Centre) do SET-u pri
požiadavke vytvorenia spojenia zo SET-u do SLC. Pokiaľ neexistuje žiadne TCP/IP
spojenie v tejto fáze, SUPL architektúra poskytuje dve alternatívy pre prenos SIF
správy:
� SIF správa je prenášaná v Push správe pomocou Bezdrôtového aplikačného
protokolu WAP Push (Wireless Aplication Protocol),
� SIF správa je prenášaná pomocou Služby krátkych správ SMS (Short Message
Service).
Číslo portu pre ULP rezervované v Internetovej štandardizačnej organizácii
IANA (Internet Assigned Numbers Authority) je 59910. Pod kontrolou SLC môže byť
niekoľko SUPL polohových centier SPC (SUPL Positioning Center) rozdeľujúcich
spravovanie činností viacerých SET-ov medzi seba. SLC môže taktiež slúžiť externým
poskytovateľom služieb alebo iným SET-om, ktoré sa správajú buď ako SUPL agenti
alebo ako klienti Mobilných lokalizačných služieb MLS (Mobile Location Services).
Komunikácia medzi SLC a MLS (SET-om, SUPL agentom) je ukončena pomocou
Protokolu mobilného určenia polohy MLP (Mobile Location Protocol)[11].

Bezpečná User Plane lokalizácia SUPL 25
Obrázok 5.1 SUPL Architektúra
5.1 SUPL Služby
SUPL Lokalizačné služby môžeme kategorizovať na sieťou iniciované a SET-
om iniciované služby.
Nasledujúce služby musia byť podporované AGPS systémom
� služba na okamžité určenie polohy,
� komerčné služby,
� núdzové služby,
� pravidelné lokalizačné služby,
� služba určenia polohy na požiadanie.
Pravidelné a odložené služby niesú zahrnuté v SUPL Release1, ale v
pripravovanom SUPL Release2.

Bezpečná User Plane lokalizácia SUPL 26
SUPL služby iniciované sieťou - sú služby, ktoré vychádzajú z vnútra SUPL
siete. Pre tieto služby je SUPL Agent obsiahnutý v sieti.
SUPL služby iniciované SET-om - sú služby, ktoré sú iniciované SET-om.
Pre tieto služby je SUPL Agent obsiahnutý vnútri SET-u.
5.1.1 Skupina lokalizačných služieb SUPL
Táto časťopisuje logické funkčné entity v SUPL funkčnej skupine lokalizačných
služieb.
Funkcia SUPL Súkromia SPF (SUPL Privacy Function)
Funkcia SPF je funkcia na overenie privátnosti používateľského SET-u .
Počas tejto funkcie musia byť splnené nasledujúce požiadavky:
� dodržať nastavenia súkromia používateľského SET-u závisiace od služieb
(iniciovaných sieťou alebo SET-om),
� dodržať notifikačné a verifikačné nastavenia cieľového SET-u.
SUPL môže používať už existujúce uzly súkromia ako napr. Register profilu
súkromia PPR (Privacy Profile Register) alebo Distribuované riadenie polohy LDC
(Location Distribution Control) na implementáciu funkcií súkromia. SPF môže byť
alternatívne súčasťou SET-u.
Funkcia SUPL inicializácie SIF (SUPL Initiation Function)
Funkcia SIF poskytuje mechanizmus pre SUPL sieť na iniciovanie spojenia so
SET-om. Má špeciálny význam v povolení SUPL sieťou iniciovaných služieb. V
prípade SUPL Sieťou iniciovaných služieb vytvára SUPL sieť tzv. SUPL reláciu
použitím jednej z nasledujúcich metód:
� WAP Protokol prenosu Push správy PAP (Push Access Protocol),
� SMS priamo v prostredí mobilného operátora.
Záleží na schopnostiach SET-u, ktorá SIF bude aplikovaná SUPL Sieťou. SET
musí podporovať aspoň jednu z týchto SUPL inicializačných metód.
Bezpečná User Plane lokalizácia SUPL 27
Funkcia SUPL zabezpečenia SSF (SUPL Security Function)
Funkcia SSF umožňuje SUPL sieti vykonávať autorizáciu a autentifikáciu SET-
u a taktiež umožňuje SET-u vykonávať autorizáciu a autentifikáciu SUPL siete. Táto
skutočnosť je dôležitá pri zabezpečení Sieťou iniciovaných a SET-om iniciovaných
SUPL služieb. SSF taktiež zabezpečuje dôvernosť a dátovú integritu služieb.
Funkcia SUPL podpory roamingu SRSF (SUPL Roaming Support Function)
K SUPL roamingu dochádza keď SET opustí oblasť poskytovania služby danej
Domácej SUPL lokalizačnej platformy H-SLP (Home-SUPL Location Platform). V
tejto oblasti poskytuje H-SLP pre SET dáta o odhadovanej polohe alebo asistenčné dáta
bez nadviazania spojenia k inému SLP.
Existuje viacero spôsobov SUPL Roamingu:
� H-SLP môže požadovať poskytovanie odhadu počiatočnej polohy od
Hosťujúcej SUPL lokalizačnej platformy V-SLP (Visited-SUPL Location
Platform) založeného na Identifikácii polohy Location ID (Location
Identification),
� H-SLP môže požadovať poskytovanie Lup určenie polohy a funkcionalitu SPC
od V-SLP.
Funcia SUPL spoplatnenia SCF (SUPL Charging Function )
Funkcia SCF je zodpovedná za spoplatnenie aktivít v rámci SLP. Tieto zahrňujú
spoplatnenie MLS Aplikácií, SUPL Agentov a užívateľov SET-u.
Hlavnou úlohou SCF je zbieranie dát pre spoplatnenie a účtovanie medzi SUPL
operátormi. Navyše SCF môže povoliť aktivity v SLP založené na posúdení dát pre
spoplatnenie.
Funkcia SUPL riadenia polohy SSMF (SUPL Service Management Function)
SSMF je funkcia spravovania polôh SET-u. Táto funkcia uchováva, spracováva
a modifikuje informácie o polohe cieľového SET-u. Počas vykonávania tejto funkcie
musia byť zohľadnené aj funkcie spoplatnenia, súkromia, zabezpečenia a Kvality
určenia polohy QoP (Quality of Position).

Bezpečná User Plane lokalizácia SUPL 28
Funkcia SUPL pridelenia adresy SET-u SSPF (SUPL SET Provisioning
Function)
SSPF zabezpečuje, aby bol SET vybavený adresou H-SLP.
5.1.2 Skupina lokalizačných funkcií SUPL
Táto časť opisuje logické funkčné entity v SUPL funkčnej skupine
lokalizačných služieb.
Funkcia SUPL doručenia asistenčných dát SADF (SUPL Assistance Delivery
Function)
SADF vytvára a doručuje dostupné asistenčné dáta, využívané pre meranie
alebo určenie polohy SET-u.
Doručenie asistenčných dát môže byť založené na vybranej podskupine GPS
referenčných dát získaných z SRRF funkcie, na schopnostiach SET-u a siete, a
približnej odhadnutej polohy cieľového SET-u.
Asistenčné dáta môžu obsahovať elementy definované v [3GPP RRLP], [3GPP
RRC]alebo [3GPP2 C.S0022-A, 3GPP2 C.S0022-0].
Funkcia SUPL získavania referenčných dát SRRF (SUPL Reference Retrieval
Function)
SRRF slúži na získanie GPS referenčných dát z GPS referenčnej siete.
Referenčné dáta sú potrebné na vytvorenie asistenčných dát.
Funkcia SUPL výpočtu polohy SPCF (SUPL Position Calculation Function)
SPCF vykonáva výpočet polohy SET-u. Minimálne jedna z nasledujúcich
lokalizačných metód môže byť podorovaná SUPL službou.
� A-GPS s asistenciou SETu – merania sú realizované v terminály narozdiel od
výpočtov,
� A-GPS založené na SET – merania a výpočet je realizovaný v terminály,
� Autonómne GPS,
� lokalizačné metódy z bunkových sietí:
� Cell-ID
� Pokročilá trilaterácia založená na meraní fázového rozdielu signálov A-
FLT (Advanced Forward Link Trilateration)

Bezpečná User Plane lokalizácia SUPL 29
� Rozšírené pozorovanie časového rozdielu E-OTD (Enhanced-Observed
Time Difference)
� Pozorovaný rozdiel časov príchodu OTDOA (Observed Time Difference
of Arrival)
� Identifikácia polohy Location ID (Location Identification)
5.2 SUPL Systém a Subsystém
5.2.1 SUPL lokalizačná platforma SLP
SLP pozostáva z SLC a SPC, ktoré môžu byť integrované v jedinom systéme.
Medzi SLP a SET-om je použité rozhranie Lup ako je ukázané na Obrázku 6.1. Toto
rozhranie prenáša správy pre SUPL Spravovanie Služby a SUPL Určenie Polohy.
Taktiež je možné funkčné oddelenie SLC a SPC do samostatných systémov v rámci
SLP.
Pre komunikáciu medzi SET-om a SLP sú navrhnuté dva módy:
� Proxy Mód: SPC systém nebude mať priame spojenie so SET-om. V takomto
prostredí sa bude SLC systém správať ako proxy medzi SET-om a SPC.
� Non Proxy Mód: SPC systém bude mať priame spojenie so SET-om.
Rozhranie Lup je použité medzi SLP a SET-om. Lup prenáša dva typy správ:
� správy určené pre SLC systém v rámci SLP: Správy Lup Spravovania Služby,
� správy určené pre SPC systém v rámci SLP: Správy Lup Určenia Polohy.
5.2.2 SUPL lokalizačné centrum SLC
SLC systém zabezpečuje koordináciu prevádzky SUPL v sieti a vykonáva
nasledujúce funkcie pri vzájomnej komunikácii so SET-om cez „User Plane“:
� Funkcia SUPL súkromia SPF,
� Funkcia SUPL zabezpečenia SSF,
� Funkcia SUPL podpory roamingu SRSF,
� Funkcia SUPL spoplatnenia SCF,
� Funkcia SUPL riadenia polohy SSMF,
� Funkcia SUPL výpočtu polohy SPCF.

Bezpečná User Plane lokalizácia SUPL 30
5.2.3 SUPL polohové centrum SPC
SPC podporuje masledujúce funkcie:
� Funkcia SUPL zabezpečenia SSF,
� Funkcia SUPL doručenia asistenčných dát SADF,
� Funkcia SUPL získavania referenčných dát SRRF,
� Funkcia SUPL výpočtu polohy SPCF.
5.2.4 Terminál s podporou SUPL SET
SET podporuje procedúry definované v SUPL využívané pri vzájomnej
komunikácii so sieťou cez „User Plane“. Taktiež môže podporovať jednu alebo viac
funkcií v závislosti na schopnostiach SET-u a na obchodných pravidlách poskytovateľa
služby:
� Funkcia SUPL súkromia SPF,
� Funkcia SUPL zabezpečenia SSF,
� Funkcia SUPL pridelenia adresy SET-u SSPF.
SET podporuje určenie polohy v MS a/alebo určenie polohy sieťou. Preto môže
podporovať funkcie:
� Funkcia SUPL výpočtu polohy SPCF,
� Funkcia SUPL doručenia asistenčných dát SADF.
V týchto prípadoch dochádza k prekrývaniu funkcionalít SLC/SPC a SET-u.
5.2.5 Komunikačné mechanizmy a rozhrania zahrnuté v Lup-e
Protokoly zahrnuté vo WAP Push sú PAP pre prenos notifikácie požiadavky na
polohu z SLP do Brány preklenutia PAP a POTAP (Push Proxy Gateway) a Protokol
bezdrôtového prenosu Push správy POTAP (Push Over-The-Air Protocol) na prenos
notifikácie z PPG do SET-u. Ďalšou možnosťou je SMS doručenie notifikácie, ktoré
môže byť iniciované z SLP alebo WAP notifikáciou. Protokolové rozhrania pre SMS
doručenie nie sú v schéme špecifikované, pretože rozhranie medzi SLP a Centrom
služby krátkych správ SMSC (Short Message Service Center) je patentované a nieje
definované v 3GPP/3GPP2. Komunikačná cesta z SMSC do SET-u nieje predmetom
tejto práce.

Bezpečná User Plane lokalizácia SUPL 31
� v Proxy móde sa medzi SLP a SET-om vytvára SUPL aplikácia výmeny správ
pre službu spravovania a určenia polohy,
� v Non Proxy móde sa medzi SLC a SET-om vytvára služba na výmenu správ
pre spravovanie a výmena správ služby pre určenie polohy prebieha medzi SPC
a SET-om[11].
5.3 Varianty spojení pri získavaní asistenčných dát:
� spojenie iniciované SET-om
� spojenie iniciované Sieťou
Varianty nadviazania spojenia:
� úspešné spojenie – Proxy mód bez Roamingu,
� úspešné spojenie – bez Proxy módu bez Roamingu,
� úspešné spojenie – Proxy mód s V-SLP a s Roamingom,
� úspešné spojenie – bez Proxy módu s Hosťujúcim SUPL polohovým centrom
V-SPC (Visited - SUPL Positioning Center) a s Roamingom,
� úspešné spojenie – Proxy mód s H-SLP a s Roamingom,
� úspešné spojenie – bez Proxy módu s Domácim SUPL polohovým centrom H-
SPC (Home - SUPL Positioning Center) a s Roamingom.
Možné chybné varianty nadviazania spojenia:
� SET nepovoľuje určenie polohy,
� neúspešná autorizácia v H-SLP,
� chybný SUPL Protokol,
� uplynutie času SUPL časovača[11].
Bezpečná User Plane lokalizácia SUPL 32
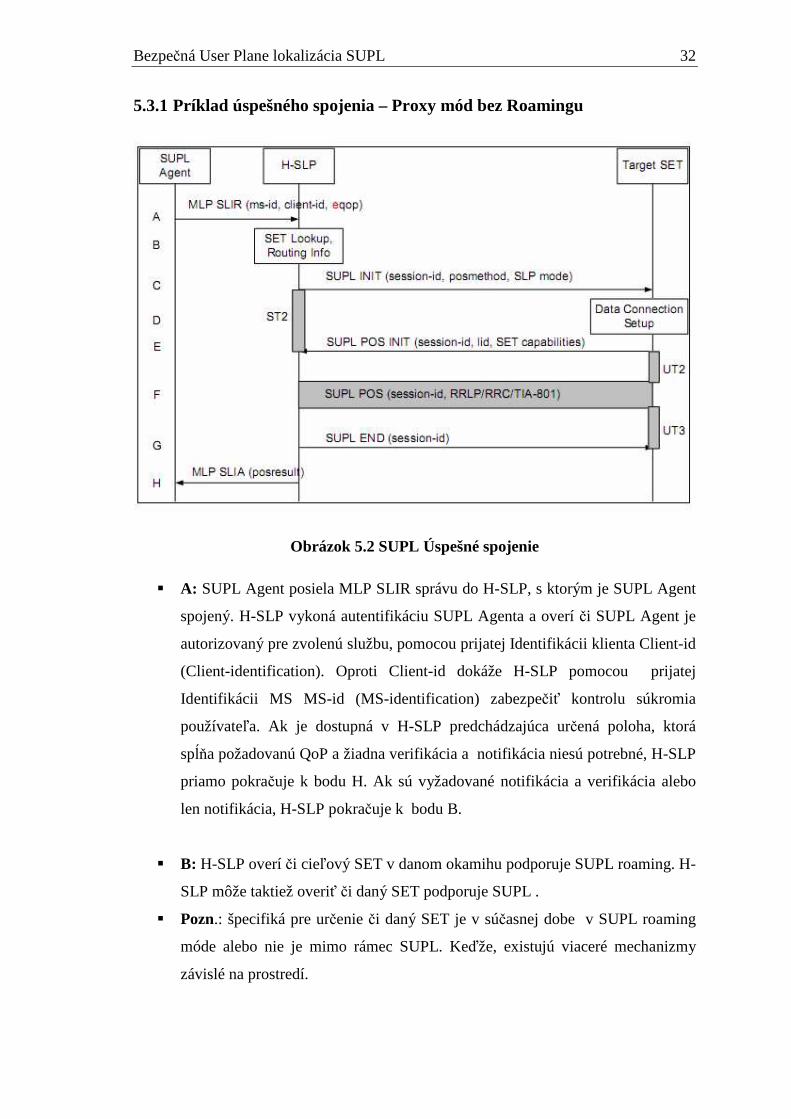
5.3.1 Príklad úspešného spojenia – Proxy mód bez Roamingu
Obrázok 5.2 SUPL Úspešné spojenie
� A: SUPL Agent posiela MLP SLIR správu do H-SLP, s ktorým je SUPL Agent
spojený. H-SLP vykoná autentifikáciu SUPL Agenta a overí či SUPL Agent je
autorizovaný pre zvolenú službu, pomocou prijatej Identifikácii klienta Client-id
(Client-identification). Oproti Client-id dokáže H-SLP pomocou prijatej
Identifikácii MS MS-id (MS-identification) zabezpečiť kontrolu súkromia
používateľa. Ak je dostupná v H-SLP predchádzajúca určená poloha, ktorá
spĺňa požadovanú QoP a žiadna verifikácia a notifikácia niesú potrebné, H-SLP
priamo pokračuje k bodu H. Ak sú vyžadované notifikácia a verifikácia alebo
len notifikácia, H-SLP pokračuje k bodu B.
� B: H-SLP overí či cieľový SET v danom okamihu podporuje SUPL roaming. H-
SLP môže taktiež overiť či daný SET podporuje SUPL .
� Pozn.: špecifiká pre určenie či daný SET je v súčasnej dobe v SUPL roaming
móde alebo nie je mimo rámec SUPL. Keďže, existujú viaceré mechanizmy
závislé na prostredí.

Bezpečná User Plane lokalizácia SUPL 33
� Pozn.: špecifiká, pre určenie či daný SET podporuje SUPL sú mimo rozsah
SUPL 1.0 špecifikácie.
� C: H-SLP zaháji komunikáciu so SET-om na určenie polohy použitím SUPL
INIT správy, ktorá môže byť vyslaná cez WAP PUSH alebo SMS. SUPL INIT
správa obsahuje minimálne Identifikátor spojenia session-id (Session
Identification), indikátor proxy/non-proxy módu a zamýšľanú metódu na
určenie polohy. SUPL INIT správa môže taktiež obsahovať požadovanú QoP,
Identifikácia kľúča Key ID (Key Identification) a Autentifikačný kód správy
MAC (Message Authentication Code). Ak výsledok kontroli privátnosti v kroku
A indikuje, že je potrebná notifikácia alebo overenie cieľového používateľa , H-
SPL môže taktiež obsahovať notifikačný element v SUPL INIT správe. Predtým
ako je SUPL INIT správa vyslaná, H-SLP vypočíta a uloží hash správy. Ak sa v
kroku A H-SLP rozhodne použiť predchádzajúcu vypočítanú polohu, SUPL
INIT správa má indikovať " toto nieje hodnota parametra metódy na určenie
polohy " a SET odpovie so SUPL END správou nesúcou výsledok overovacieho
procesu (prístup povolený, prístup zamietnutý). Ak nieje vyžadovaná žiadna
jednoznačná verifikácia (iba notifikácia) SET odpovie so SUPL END správou.
H-SLP potom priamo pokračuje krokom H.
� Pozn: pred vyslaním SUPL END správy, SET vykoná postup vytvorenia
dátového spojenia popísaný v kroku D a použije postupy z kroku E na
vybudovanie bezpečného IP spojenia do H-SLP.
� D: Keď je SUPL INIT správa prijatá SET-om, tak sa buď sám pripojí do
paketovej siete ak ešte nieje pripojený, alebo vybuduje spojenie s prepájaním
okruhov. Ak sa v prijatej SUPL INIT správe nachádzajú parametre Key ID a
MAC, SET ich môže použiť na overenie autentifikácie SUPL INIT správy
pokiaľ ich podporuje.
� E: SET vyhodnotí notifikačné pravidlá a taktiež kontroluje indikátor proxy/non-
proxy módu na určenie či H-SLP používa proxy alebo non-proxy mód. V tomto
prípade je použitý proxy mód a teda SET vybuduje bezpečné IP spojenie do H-
SLP použitím SLP adresy, ktorá bola pridelená SET-u domácou sieťou. SET
následne posiela SUPL POST INIT správu na zahájenie sekvencie určovania

Bezpečná User Plane lokalizácia SUPL 34
polohy s H-SLP. SET pošle SUPL POST INIT správu aj keď SET-om
podporované technológie na určenie polohy nezahŕňajú žiadanú metódu na
určenie polohy nachádzajúcu sa v SUPL INIT správe. SUPL POS INIT správa
obsahuje minimálne session-id, schopnosti SET-u, a hash prijatej SUPL INIT
správy (ver) a identifikátor polohy (lid). Schopnosti SET-u zahŕňajú metódy na
určenie polohy (SET- Assisted A-GPS, SET-Based A-GPS) a prislúchajúce
protokoly (RRLP, RRC, TIA-801). SET môže podporovať Správy sieťových
meraní NMR (Network Measurement Report) špecifické pre použitú rádiovú
technológiu. SET môže poskytovať svoju polohu ak to je podporované. Taktiež
môže stanoviť požadovaný element asistenčných dát v SUPL POS INIT. Ak
približná poloha určená na základe informácií prijatých v SUPL POS INIT
správe spĺňa požadovanú QoP, H-SLP pokračuje priamo krokom G.
� F: H-SLP kontroluje, že sa hash SUPL INIT správy zhoduje s vypočítaným
hash-om pre túto konkrétnu sekvenciu. Na základe SUPL POS INIT správy
zahrňujúcej metódy na určenie polohy podporované SET-om, následne H-SLP
vyberie konkrétnu metódu na určenie polohy. H-SLP použije podporovaný
protokol na určenie polohy (napr.RRLP, RRC, TIA-801) zo SUPL POS INIT
správy ak je to vyžadované pre danú metódu. SET a H-SLP si môžu vymieňať
viaceré správy procedúr na určenie polohy. H-SLP vypočíta odhad polohy
založený na prijatých meraniach polohy (SET-Assisted) alebo SET vypočíta
odhad polohy založený na asistenčných informáciách získaných z H-SLP (SET-
Based).
� G: Keď je výpočet na určenie polohy kompletný, H-SLP pošle SUPL END
správu do SET-u, ktorá hovorí, že žiadna ďalšia procedúra na určenie polohy
nebude spustená a sekvencia na určenie polohy je ukončená. SET uvoľní
bezpečné IP spojenie do H-SLP ako aj všetky prostriedky vzťahujúce sa k tejto
sekvencii.
� H: H-SLP posiela odhad polohy späť do SUPL Agenta prostredníctvom MLP
SLIA správy a uvoľní všetky prostriedky vzťahujúce sa k tejto sekvencii

AGPS a GPS Zariadenia 35
6 AGPS A GPS ZARIADENIA
V súčasnosti je na trhu veľké množstvo navigačných GPS zariadení, ale len
málo z nich využíva AGPS technológiu. Preto som sa rozhodol opísať bližšie parametre
dvoch zariadení, ktoré v kapitole 7 použijem na merania a jedného externého AGPS
prijímača populárneho medzi spotrebiteľmi.
6.1 Hp hw 6515 - AGPS
Kľúčové vlastnosti z pohľadu použitia AGPS:
� pracuje v pásmach GSM 850/900/1800/1900,
� procesor Intel PXA270 312 MHz,
� pamäte 64 MB Flash ROM, 64 MB SDRAM,
� displej TFT dotykový, 65000 farieb, 240 x 240 pixelov,
� podporuje Všeobecnú rádiovú paketovú službu GPRS (General Packet Radio
Service), EDGE, AGPS,
� pracuje s Microsoft Windows Mobile 2003 SE PocketPC Phone Edition.
Zariadenie podporuje AGPS technológiu. Obsahuje GPS modul značky
Globallocate a spolupracuje s User Plane AGPS riešením pre rýchlejšie určenie polohy.
Asistenčné dáta pre využitie AGPS technológie sťahuje Hp cez GPRS z
referenčnej siete firmy Broadcom alebo cez internetové pripojenie.
6.2 Mio P550 - GPS
Kľúčové vlastnosti z pohľadu použitia GPS:
� procesor: Samsung 2440 400 MHz,
� pamäte: 128 MB flash ROM, 64 MB SDRAM,
� displej: 3.5 " TFT aktívny dotykový, 240 x 320 pixelov, 64000 farieb,
� podporuje GPS, Bluetooth 2.0, Wifi,
� pracuje s Microsoft Windows Mobile 5.0.

AGPS a GPS Zariadenia 36
Hlavný rozdiel oproti HP hw6515 je v použitom GPS module. MIO P550 má
GPS modul SiRFstarIII vďaka ktorému poskytuje dobrý čas TTFF ako aj rýchlosť a
presnosť navigácie[1] [13].
6.3 WondeX BT-100Y
Pokiaľ sa v mobilnom zariadení (PDA, mobil) nenachádza prijímač AGPS,
môžeme na zariadenie pripojiť tzv. externý prijímač. Takéto riešenie podporuje
WondeX BT-100Y.
Kľúčové vlastnosti z pohľadu použitia AGPS:
� 54 kanálový AGPS prijímač,
� AGPS dáta získava zo Skytraq AGPS serveru,
� poskytuje presnosť WAAS systému,
� horúci/teplý/studený štart: 1/28/30 sec,
� minimálna úroveň signálu: -159dBm.
Takéto riešenia sa v súčasnosti nepoužívajú až tak často ako predchádzajúce z
dôvodu horšieho prispôsobenia napr. mobilného telefónu na zobrazovanie navigačných
máp na displeji[14].
V súčasnosti je v Spojených štátoch amerických značne rozšírené používanie
AGPS technológie v bežných mobilných telefónoch z dôvodu podpory tiesňových
volaní E911. Zavedený systém núdzových volaní E911 fázy 2 (Wireless E911 Phase 2)
vyžaduje použitie AGPS technológie v mobilných zariadeniach pre presnejšie a
rýchlejšie určenie polohy ako v predchádzajúcej fáze1.
Veľké množstvo v súčasnosti ponúkaných mobilných telefónov a PDA
zariadení značiek ako Motorola, BlackBerry, HTC atď. má implementovanú
technológiu AGPS.

Merania 37
7 MERANIA
Merania boli realizované pomocou dvoch zámerne zvolených zariadení.
Nakoľko prvé zariadenie podporuje AGPS a druhé nie, z toho dôvodu sa bude dať
jednoducho posúdiť vplyv použitia AGPS na pozorovanú veličinu. Použil som
nasledovné zariadenia:
� Hp hw 6515,
� Mio P550.
Obidve zariadenia sú opísané v predchádzajúcej kapitole.
Merania boli realizované v rozličných prostrediach pričom som kládol dôraz na
ich odlišnú polohu a podmienky príjmu satelitných signálov, čiže LoS. Zvolil som
nasledovné prostredia:
� mestské,
� predmestské,
� vidiecke.
Merania boli vykonané pre dva prípady štartu GPS prijímača tzn. studený a
horúci, pretože boli merané na jednom mieste a v rovnakom čase. Odmeral som teda tri
rôzne TTFF pre každé prostredie a každé zariadenie.
7.1 Mestské prostredie
Meranie prebehlo v blízkosti centra mesta Martin. Miesto merania je znázornené
na obrázku v prílohe 1.
Tabuľka 7.1 TTFF v mestskom prostredí
Zariadenie TTFF [s] TTFF 2 [s] TTFF 3 [s]
Hp AGPS 105 5,706 7,63
Hp GPS 148,92 7,38 4
Mio GPS 85,388 2,34 7,02
Z tabuľky je možné vidieť, že najdlhšiu dobu studeného TTFF zaznamenal
samotný prijímač GPS signálov v Hp pričom najkratšiu dobu studeného TTFF dosiahlo
Mio. Asistenčné dáta v Hp využil AGPS prijímač v tomto zariadení na takmer tretinové

Merania 38
zlepšenie času studeného TTFF. Pri druhom a treťom TTFF, teda pri horúcich štartoch
sa hodnoty odlišovali od ideálnych z dôvodu značného krytia zo strany budov.
7.2 Predmestské prostredie
Meranie prebehlo v prímestskej časti mesta Martin na sídlisku v Priekope.
Miesto merania je znázornené na obrázku v prílohe 1.
Tabuľka 7.2 TTFF v predmestskom prostredí
Zariadenie TTFF [s] TTFF 2 [s] TTFF 3 [s] Hp AGPS 46,68 1,434 2,364
Hp GPS 113,41 0,3 0,33
Mio GPS 40,6 0 0,86
Z tabuľky je možné pozorovať výrazné zlepšenie časov studeného TTFF u
všetkých zariadení z dôvodu zlepšenia podmienok pre príjem satelitných signálov, čiže
výrazne lepší LoS. Samotný GPS prijímač dosiahol podstatne lepšiu hodnotu času
studeného TTFF ako v mestskom prostredí, ktorá je použiteľná na navigáciu. V tomto
meraní sa vo väčšej miere prejavila úloha asistenčných dát keďže Hp AGPS ako aj Mio
dosiahli veľmi podobné hodnoty. Časy nasledujúcich TTFF sú takmer zanedbateľné.
Mio dosiahlo nemerateľný čas horúceho TTFF vďaka vylepšenému GPS chipsetu
SiRFstarIII.
7.3 Vidiecke prostredie
Meranie prebehlo v blízkosti mesta Martin. Miesto merania je znázornené na
obrázku v prílohe 1.
Tabuľka 7.3 TTFF vo vidieckom prostredí
Zariadenie TTFF [s] TTFF 2 [s] TTFF 3 [s] Hp AGPS 51,33 2 0,88
Hp GPS 56,12 16,97 21,66
Mio GPS 40,6 0,26 0,4
Z tabuľky vidíme, že hodnoty nameraných časov studeného TTFF sú podobné
hodnotám pre predmestské prostredie. V prípade Hp GPS prijímaču došlo k zlepšeniu
studeného TTFF na jeho najlepšiu hodnotu z dôvodu nerušeného ideálneho LoS. V
takomto prostredí sa výhoda Hp AGPS ako aj Mia stráca a preto sú časy studených

Merania 39
TTFF podobné. U Hp GPS sa aj napriek výbornej hodnote TTFF nepodarilo dosiahnuť
podobných výsledkov v časoch horúcich TTFF.
Vo všetkých troch meraniach sa v plnej miere prejavil vplyv prostredia, pretože
časy studených TTFF boli v mestskom prostredí najdlhšie zatiaľ čo v ďalších
meraniach sa skrátili takmer o polovicu čo bolo spôsobené dostatočným LoS pre
určenie polohy.
Vplyv technológie AGPS na studený štart sa prejavil v mestskom prostredí
tretinovým a v predmestskom prostredí polovičným skrátením studeného TTFF v
samotnom zariadení Hp. Vo vidieckom prostredí sa AGPS technológia prejavila
krátkymi časmi pri horúcich TTFF.
Avšak vplyv technológie AGPS sa v porovnaní s výbornými hodnotami časov
všetkých TTFF zariadenia Mio stráca z dôvodu rýchlejšieho GPS chipsetu SiRFstarIII.

Záver 40
8 ZÁVER
V súčasnosti dochádza k veľkému rozvoju satelitných služieb hlavne v oblasti
navigácie využitím systému GPS, ktorého prijímače sa v čoraz väčšej miere integrujú
do veľkého množstva zariadení ako napr. mobilné telefóny, PDA a pod.
Keďže GPS prijímač potrebuje pre určenie polohy MS prístup k „otvorenej
oblohe“ tzv. LoS, nedá sa GPS systém plne využívať v zastavaných mestských
oblastiach tzv. „mestských kaňonoch“. Pre prostredia s nedostatočným LoS bol
navrhnutý AGPS systém
Zámerom práce bolo dôkladne rozobrať AGPS systém a overiť jeho schopnosti
praktickými meraniami.
Technológia AGPS je založená na využívaní asistenčných dát spolu s GPS
navigáciou na zlepšenie času studeného TTFF, čo môže mať široké využitie pri
núdzových volaniach, pričom asistenčné dáta sú do MS prenášané bunkovou sieťou. V
našom prípade je to sieť GSM.
Existujú dve riešenia vytvorenia AGPS siete určenej na poskytovanie
asistenčných dát a to „Control Plane“ a „User Plane“. „User Plane“ riešenie nevyžaduje
pri zavádzaní systému takmer žiadne náklady a využíva v súčasnosti najrozšírenejšie
TCP/IP protokoly preto má lepšie predpoklady na budúci rozvoj ako „Control Plane“
riešenie, ktoré je finančne náročné a využíva prepojovanie kanálov. „User Plane“
riešeniu som sa v bakalárskej venoval aj z dôvodu jeho značnej implementácie v
Európe. V súčasnosti je riešenie „User Plane“ rozšírené do štandardizovaného riešenia
SUPL, ktoré je podrobne opísané v práci.
Pre potvrdenie výhod AGPS technológie som sa v bakalárskej práci venoval
meraniam, ktoré preukázali výhody AGPS len z časti. V samotnom AGPS zariadení bol
značný rozdiel v studených štartoch pri použití klasického GPS a AGPS v mestskom
prostredí. Avšak pri porovnaní AGPS zariadenia s rozdielnym GPS zariadením som
zistil nepatrne lepšie hodnoty studeného TTFF v prospech GPS. Táto odlišnosť je
spôsobená použitím citlivejšieho a rýchlejšieho chipsetu v GPS zariadení ako aj vekom
oboch zariadení.

Záver 41
Technológia AGPS má z pohľadu budúcnosti veľký potenciál pri stále sa
rozvíjajúcom trhu satelitných služieb a bude využívaná vďaka rýchlemu studenému
TTFF najmä pri lokalizácii v mestských častiach a pri tiesňových volaniach.

Zoznam použitej literatúry 42
9 ZOZNAM POUŽITEJ LITERATÚRY
[1] Lissai G.: „Assisted GPS Solution in Cellular Networks“, Rochester Institute of
Technology, November 2006.
[2] Pillár S.: „Multimediálne služby poskytované družicovou sieťou“, Technická
Univerzita v Košiciach, Máj 2001.
[3] Dana P., H.: „Global Positioning System Overview“, Department of Geography,
University of Texas at Austin, 1994.
[4] McDaid C.: „GPS Overview“, Ireland.
http://www.palowireless.com/gps/tutorial.asp
[5] „About EGNOS“, ESA Navigation department, July 2007
http://www.esa.int/esaNA/GGGQI950NDC_egnos_2.html
[6] Parkinson, B.W. (1996) : „Global Positioning System: Theory and
Applications“, chap. 1: Introduction and Heritage of NAVSTAR, the Global
Positioning System. pp. 3-28, American Institute of Aeronautics and
Astronautics, Washington, D.C.
[7] Lux S.: „Assisted-GPS provides faster data acquisition“, Atmel Corp., January
2006.
[8] Bryant R.: „Assisted GPS“, Canberra Australia, May 2005.
[9] Secure User Plane Location, October 2007
http://www.broadcom.com/products/GPS/Location-Based-Services/SUPL-SLP
[10] Kemppi, P.: „Next generation satellite navigation systems“, VTT RESEARCH
NOTES 2408 ESPOO Finland, September 2007. ISBN 978-951-38-6961-8
[11] „Secure User Plane Location Architecture“, OMA-AD-SUPL-V1.0-20060127C,
Candidate Version 1.0, 27 Jan 2006.
[12] http://www.gpspassion.com/fr/articles.asp?id=166
[13] http://www.gpspassion.com/forumsen/topic.asp?TOPIC_ID=55087
[14] http://www.semsons.com/wo44chawaauo.html

43
ČESTNÉ VYHLÁSENIE
Vyhlasujem, že som zadanú bakalársku prácu vypracoval samostatne, pod
odborným vedením vedúceho bakalárskej práce Ing. Peter Brída, PhD. a používal som
literatúru uvedenú v práci.
Súhlasím so zapožičiavaním bakalárskej práce.
V Žiline dňa ........................... podpis študenta

44
POĎAKOVANIE
Rád by som touto cestou poďakoval vedúcemu bakalárskej práce Ing. Petrovi
Brídovi, PhD. za jeho podporu a spoluprácu pri vypracovávaní tejto bakalárskej práce.
Zároveň by som chcel poďakovať mojej rodine za trpezlivosť.

PRÍLOHY

Príloha 1 – Miesta Meraní 46
Príloha 1 – Miesta Meraní
� Mestské prostredie
� Predmestské prostredie

Príloha 1 – Miesta Meraní 47
� Vidiecke prostredie
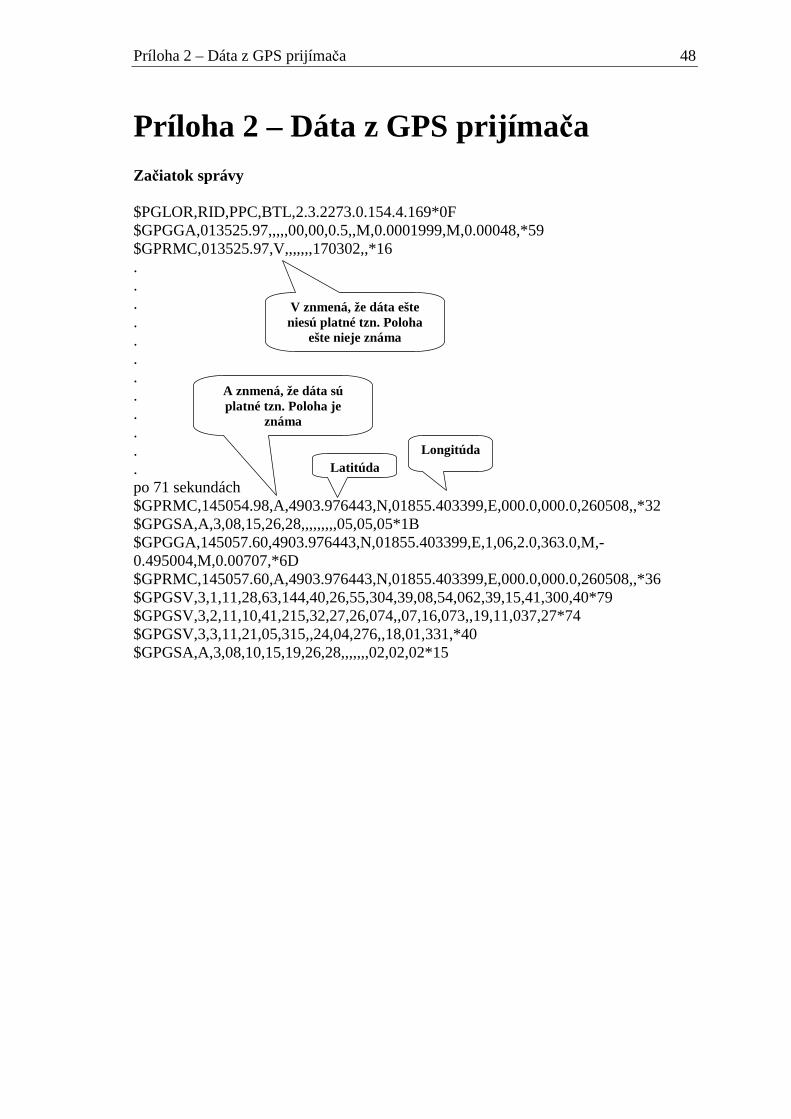
Príloha 2 – Dáta z GPS prijímača 48
Príloha 2 – Dáta z GPS prijímača Začiatok správy $PGLOR,RID,PPC,BTL,2.3.2273.0.154.4.169*0F $GPGGA,013525.97,,,,,00,00,0.5,,M,0.0001999,M,0.00048,*59 $GPRMC,013525.97,V,,,,,,,170302,,*16 . . . . . . . . . . . . po 71 sekundách $GPRMC,145054.98,A,4903.976443,N,01855.403399,E,000.0,000.0,260508,,*32 $GPGSA,A,3,08,15,26,28,,,,,,,,,05,05,05*1B $GPGGA,145057.60,4903.976443,N,01855.403399,E,1,06,2.0,363.0,M,- 0.495004,M,0.00707,*6D $GPRMC,145057.60,A,4903.976443,N,01855.403399,E,000.0,000.0,260508,,*36 $GPGSV,3,1,11,28,63,144,40,26,55,304,39,08,54,062,39,15,41,300,40*79 $GPGSV,3,2,11,10,41,215,32,27,26,074,,07,16,073,,19,11,037,27*74 $GPGSV,3,3,11,21,05,315,,24,04,276,,18,01,331,*40 $GPGSA,A,3,08,10,15,19,26,28,,,,,,,02,02,02*15
Longitúda Latitúda
V znmená, že dáta ešte niesú platné tzn. Poloha
ešte nieje známa
A znmená, že dáta sú platné tzn. Poloha je
známa

Príloha 3 – Meracie zariadenia 49
Príloha 3 – Meracie zariadenia

![IPWA PLC [RC:2432] ANNUAL REPORT AND FINANCIAL STATEMENTS ... PLC - 2013... · 31 december, 2013 bbc professionals chartered accountants ipwa plc [rc:2432] annual report and financial](https://img.pdfslide.us/doc/110x75/5ad424867f8b9a177c8b49ce/ipwa-plc-rc2432-annual-report-and-financial-statements-plc-201331-december.jpg)