Embed Size (px)
DESCRIPTION
qeqweqadaD
Citation preview

ADAPTIVE FILTERS IInstructor :Dr Aamer Iqbal Bhatti
ADAPTIVE FILTERS IInstructor :Dr. Aamer Iqbal BhattiRandom Variable and Stochastic Random Variable and Stochastic
ProcessesProcessesProcessesProcesses
Lecture# Lecture# 0202
June 3, 2003 Lecture 2 1

Optimal Filters
Word optimal means doing a job in the best possible way.p g j p y Before beginning search for such an optimal solution , the
job must be defined. A mathematical scale must be established for what best
means , and the possible alternatives must be spelled out. Unless there is agreement an these qualifiers a claim that a
system is optimal is really meaningless.
3 June 2003Lecture 22

Statement for the Optimal ProblemA mathematical statement of optimalproblem consists ofproblem consists of Description of system constraints and possible
alternativesalternatives A description of task to be performed A statement of the criterion for judging optimal A statement of the criterion for judging optimal
performance
3 June 2003Lecture 23

Linear Optimal Filtering: Statement of the Problem
Output of the system is used to provide an estimate of the desired responsep
Filter input and output represents single realization of respective stochastic processes i.e. the process to be p p pfiltered and the desired process after filtering of the input process.
3 June 2003Lecture 24
Linear Optimal Filtering: Statement of the Problem Estimation is accomplished by an reducing an error with Estimation is accomplished by an reducing an error with
the statistical characteristics of its own. Mathematical scale for the performance of the filtering Mathematical scale for the performance of the filtering
system is to minimize the estimation error produced by the filter approximationsthe filter approximations
3 June 2003Lecture 25

Linear Optimal Filtering: Statement of the blProblem
Constraints which have been placed on the system are p y The system is linear , which makes the problem
mathematically easy to tracty y The filter operates in discrete time
3 June 2003Lecture 26
Choice of the Filter Parameters Choice for the finite or infinite impulse response of the
filter depends on the practical considerationsp p Selection of the statistical criterion for optimization of
filter is influenced by mathematical tractabilityy y
3 June 2003Lecture 27

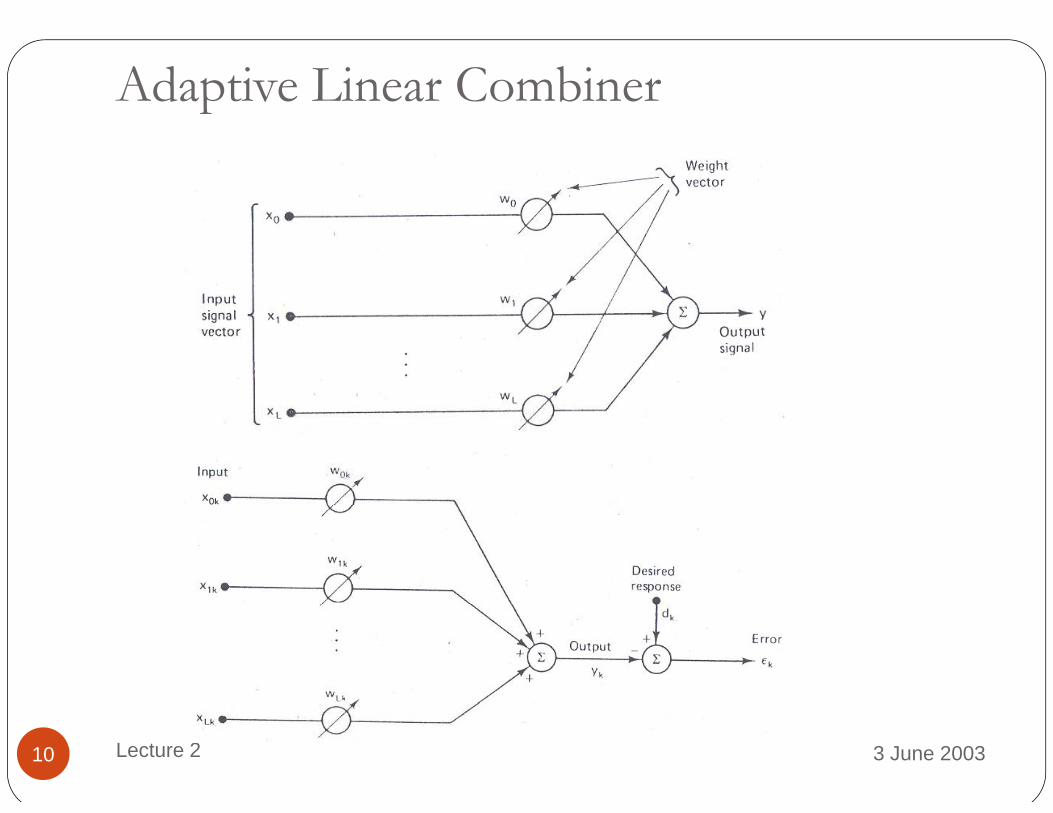
Adaptive Linear Combiner Adaptive Linear Combiner appears in most of adaptive
systemsy It is the single most important element in learning
systemsy It is a non-recursive digital filter and its performance is
quite simpleq p Linear adaptive consists of a multiple summer and their
associated weightsg
3 June 2003Lecture 28

Adaptive Linear Combiner These weights are varied in order to change the response
of the system to achieve some desired response Procedure for adapting weights is called “Weight
Adjustment” Adaptive linear combiner is a linear system once its
weights are adjustedD i i h dj i h f i f h During weight adjustment weights are function of the input vector
3 June 2003Lecture 29
Adaptive Linear Combinerp
3 June 2003Lecture 210

Input Signal and Weight Vectors
There are two types of inputsSimultaneous inputs from different sourcesSequential Samples or single input
Input vector for both of them is are given byp g y
T
TLk1k0k
I tSi l
xxx :Inputs Multiple
L-k1-kk xxx:Input Single
3 June 2003Lecture 211

Input Signal and Weight Vectors
First of these is for the spatial domain and second one is for ptemporal domain
Response for spatial and temporal inputs are given byp p p p g y
L
llklk xw
0ky:Input Single
L
lkllk
l
xw0
k
0
y:Input Multiple
kT
kkTk
l
XWWX
k
0
y :FormMatrix In
3 June 2003Lecture 212

3 June 2003Lecture 213

3 June 2003Lecture 214

Figure
3 June 2003Lecture 215

Figure
3 June 2003Lecture 216

Figure
3 June 2003Lecture 217

Random Variable and StatisticsRandom Variable The study of Probability
d R d V i bl i
Statistics On the other hand for the
study of statistics we dealand Random Variables is concerned with mathematical function of
study of statistics we deal with random data.
X=[1 -2 1 -4 4 ]mathematical function of PDF or CDF.
X [1, 2,1, 4,4,………..] We can compute Average
and Variance. N1
N
iix
NxE
1
1][
22 ])[(][][ xExExVar
In DSP and Communication we deal
])[(][][ xExExVar
)(xpx
We compute Mean and Variance from PDF
with data along with some supposition about its probability distribution
probability distribution
dxxxpxE x )(][ 22 ])[(][][ xExExVar

Pair of Random Variables We deal with joint PDF and joint
CDF to know the random behavior of pair of RV
Pair of random can be visualized by histogram or scatter plot.
k d bof pair of RV. We can compute Marginal and
Conditional PDF’s and CDF’s.
We can make an idea about their corelatedness and uncorrelatedness.
We can compute correlation and We can compute their marginal
means, variances, correlation and correlation coefficient
W pcorrelation coefficient.
11correlation coefficient.
Dependence and Independence. Correlation: How a random variable
is similar or dissimilar in its statistics
11 XYp p
How the chance of occurrence of one random variable effects the chance of occurrence of other
is similar or dissimilar in its statistics from other random variable.
chance of occurrence of other random variable

Stochastic or Random Processes Stochastic process (random process) is used to describe
the time evolution of a statistical phenomenon.the time evolution of a statistical phenomenon. Stochastic process is a representation of many or
infinite time series of random datainfinite time series of random data.
1 1 . 5
9 . 5
1 0
1 0 . 5
1 1
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 08
8 . 5
9

Stationary and Wide Sense Stationary A stochastic process is Strict Sense Stationary(SSS), if its
statistical properties are invariant to a time shiftp p Joint pdf of {x(n), x(n-1), ... , x(n-M)} remain the same
regardless of n. Joint pdf is not easy to obtain,
First and second moments are used frequently.
A stochastic process is Wide Sense Stationary(WSS), if its first and second order statistical properties are i i i hifinvariant to a time shift. Statistic expectation: mx(n)=E[x(n)] Autocorrelation function: For a stochastic process {x(n)} Autocorrelation function: For a stochastic process {x(n)}
φxx(n,m)=E[x(n)x*(m)]

Ergodic Processes Ensemble averages (expectations) are across the process -> can be obtained
analytically (actual expec.) Sample (time) averages are along the process > can be obtained emprically Sample (time) averages are along the process -> can be obtained emprically
(from realizations of a process) (estimated expectation)
1 1 .5
1 0
1 0 .5
1 1
sample (time)
8 5
9
9 .5
average
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 08
8 .5
Ensemble
If sample averages converge to ensemble averages in, e.g. mean square error sense,
average
We call the process x(n) as ergodic.

Correlation Function Auto Correlation Function φxx(n,m)=E[x(n)x*(m)];φxx( , ) [ ( ) ( )]; φxx(k)=E[x(n)x*(n-k)];
Properties of Auto Correlation Function.P ope t es o uto Co e at o Fu ct o . |φxx(k)|≤φxx(0) φxx(k)=φxx(-k)φxx( ) φxx( ) φxx(0)=E[x2(n)] x[n] has no periodic component.2
||ˆ)(lim xkxxk
[ ] p p
x[n] is argodic, zero mean.
||)(xxk
0)(lim||
kxxk [ ] g
|| k

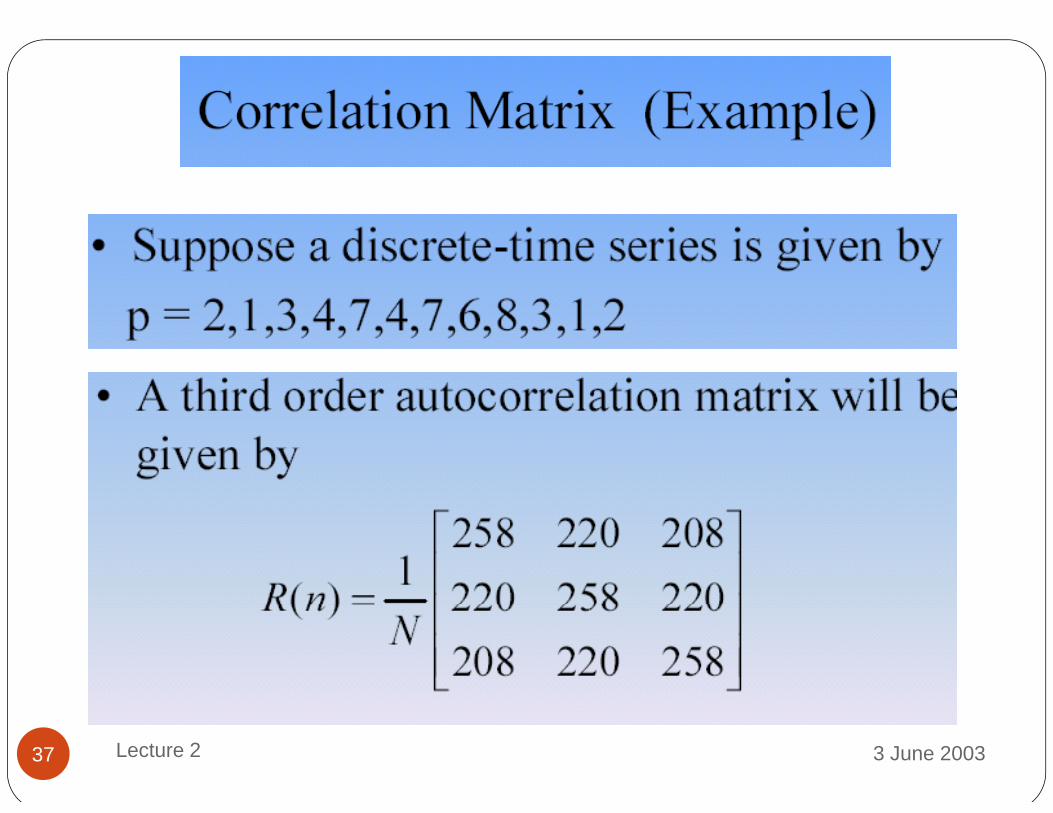
Correlation Matrix >> x=[1 -2 1 3];
>> XX=xcorr(x)
XX =
3 -5 -1 15 -1 -5 3
>> R=toeplitz(XX(4:end))
R =R
15 -1 -5 3
-1 15 -1 -5
-5 -1 15 -1
3 -5 -1 15 3 -5 -1 15
Auto Correlation Process Auto correlation of White Gaussian Noise. Auto correlation of slowly varying Process.Auto correlation of slowly varying Process. Auto correlation of rapidly varying process.

Properties of Auto Correlation Matrix Property 1: The correlation matrix of a stationary discrete-
time stochastic process is Hermitian symmetric. Property 2: The correlation matrix of a stationary discrete-
time stochastic process is Toeplitz. Property 3: The correlation matrix of a discrete time Property 3: The correlation matrix of a discrete-time
stochastic process is always non-negative definite and almost always positive definite.
Property 4: The correlation matrix of a w.s.s. process is nonsingular due to the unavoidable presence of additive noisenoise.
Property 5: If the order of the elements of the vector u(n) is (time)-reversed, the effect is the transposition of the ( ) , pautocorrelation matrix.
3 June 2003Lecture 227

Equations
3 June 2003Lecture 228

EquationsEquations
3 June 2003Lecture 229

3 June 2003Lecture 230

3 June 2003Lecture 231

3 June 2003Lecture 232

3 June 2003Lecture 233

3 June 2003Lecture 234

3 June 2003Lecture 235

3 June 2003Lecture 236
3 June 2003Lecture 237

3 June 2003Lecture 238

3 June 2003Lecture 239

3 June 2003Lecture 240
3 June 2003Lecture 241

3 June 2003Lecture 242
3 June 2003Lecture 243

3 June 2003Lecture 244

3 June 2003Lecture 245

3 June 2003Lecture 246

Back
3 June 2003Lecture 247

Back
3 June 2003Lecture 248

Back
3 June 2003Lecture 249
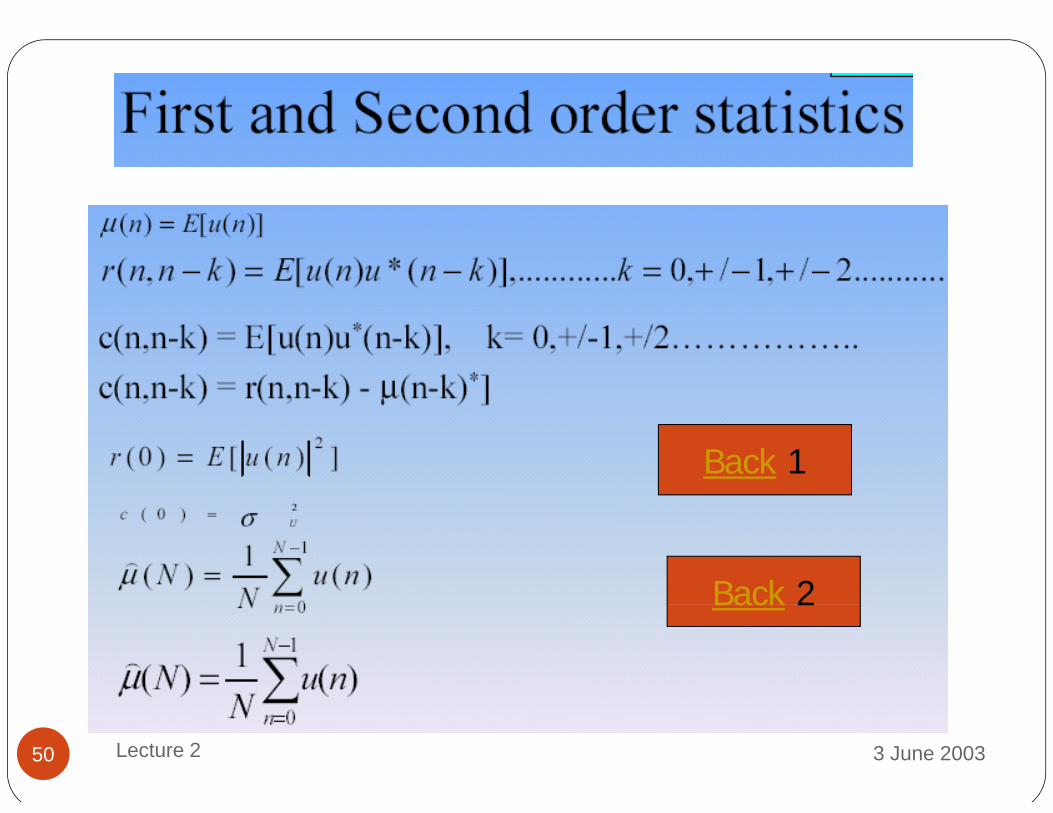
Back 1
Back 2Back 2
3 June 2003Lecture 250





























