Embed Size (px)
Citation preview
![Page 1: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/1.jpg)
Hybrid Forecasting of Chaotic Processes: Using Machine Learning inConjunction with a Knowledge-Based Model
Jaideep Pathak,1 Alexander Wikner,2 Rebeckah Fussell,3 Sarthak Chandra,1 Brian R. Hunt,1 Michelle Girvan,1
and Edward Ott11)University of Maryland, College Park, Maryland 20742, USA.2)Rice University, Houston, Texas 77005, USA.3)Haverford College, Haverford, Pennsylvania 19041, USA.
(Dated: 14 March 2018)
A model-based approach to forecasting chaotic dynamical systems utilizes knowledge of the physical processesgoverning the dynamics to build an approximate mathematical model of the system. In contrast, machinelearning techniques have demonstrated promising results for forecasting chaotic systems purely from pasttime series measurements of system state variables (training data), without prior knowledge of the systemdynamics. The motivation for this paper is the potential of machine learning for filling in the gaps in ourunderlying mechanistic knowledge that cause widely-used knowledge-based models to be inaccurate. Thuswe here propose a general method that leverages the advantages of these two approaches by combining aknowledge-based model and a machine learning technique to build a hybrid forecasting scheme. Potentialapplications for such an approach are numerous (e.g., improving weather forecasting). We demonstrate andtest the utility of this approach using a particular illustrative version of a machine learning known as reservoircomputing, and we apply the resulting hybrid forecaster to a low-dimensional chaotic system, as well as toa high-dimensional spatiotemporal chaotic system. These tests yield extremely promising results in that ourhybrid technique is able to accurately predict for a much longer period of time than either its machine-learningcomponent or its model-based component alone.
Prediction of dynamical system states (e.g., asin weather forecasting) is a common and essen-tial task with many applications in science andtechnology. This task is often carried out via asystem of dynamical equations derived to modelthe process to be predicted. Due to deficienciesin knowledge or computational capacity, applica-tion of these models will generally be imperfectand may give unacceptably inaccurate results. Onthe other hand data-driven methods, independentof derived knowledge of the system, can be com-putationally intensive and require unreasonablylarge amounts of data. In this paper we considera particular hybridization technique for combin-ing these two approaches. Our tests of this hybridtechnique suggest that it can be extremely effec-tive and widely applicable.
I. INTRODUCTION
One approach to forecasting the state of a dynamicalsystem starts by using whatever knowledge and under-standing is available about the mechanisms governing thedynamics to construct a mathematical model of the sys-tem. Following that, one can use measurements of thesystem state to estimate initial conditions for the modelthat can then be integrated forward in time to produceforecasts. We refer to this approach as knowledge-basedprediction. The accuracy of knowledge-based predictionis limited by any errors in the mathematical model. An-other approach that has recently proven effective is to usemachine learning to construct a model purely from ex-
tensive past measurements of the system state evolution(training data). Because the latter approach typicallymakes little or no use of mechanistic understanding, theamount of training data and the computational resourcesrequired can be prohibitive, especially when the systemto be predicted is large and complex. The purpose ofthis paper is to propose, describe, and test a generalframework for combining a knowledge-based approachwith a machine learning approach to build a hybrid pre-diction scheme with significantly enhanced potential forperformance and feasibility of implementation as com-pared to either an approximate knowledge-based modelacting alone or a machine learning model acting alone.The results of our tests of our proposed hybrid schemesuggest that it can have wide applicability for forecast-ing in many areas of science and technology. We notethat hybrids of machine learning with other approacheshave previously been applied to a variety of other tasks,but here we consider the general problem of forecastinga dynamical system with an imperfect knowledge-basedmodel, the form of whose imperfections is unknown. Ex-amples of such other tasks addressed by machine learninghybrids include network anomaly detection1, credit rat-ing2, and chemical process modeling3, among others.
Another view motivating our hybrid approach is that,when trying to predict the evolution of a system, onemight intuitively expect the best results when makingappropriate use of all the available information about thesystem. Here we think of both the (perhaps imperfect)physical model and the past measurement data as beingtwo types of system information which we wish to simul-taneously and efficiently utilize. The hybrid techniqueproposed in this paper does this.
arX
iv:1
803.
0477
9v1
[cs
.LG
] 9
Mar
201
8
![Page 2: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/2.jpg)
2
To illustrate the hybrid scheme, we focus on a particu-lar type of machine learning known as ‘reservoir comput-ing’4–6, which has been previously applied to the predic-tion of low dimensional systems7 and, more recently, tothe prediction of large spatiotemporal chaotic systems8,9.We emphasize that, while our illustration is for reservoircomputing with a reservoir based on an artificial neu-ral network, we view the results as a general test of thehybrid approach. As such, these results should be rel-evant to other versions of machine learning10 (such asLong Short-Term Memory networks11), as well as reser-voir computers in which the reservoir is implemented byvarious physical means (e.g., electro-optical schemes12–14
or Field Programmable Gate Arrays15) A particularlydramatic example illustrating the effectiveness of the hy-brid approach is shown in Figs. 7(d,e,f) in which, whenacting alone, both the knowledge-based predictor and thereservoir machine learning predictor give fairly worthlessresults (prediction time of only a fraction of a Lyapunovtime), but, when the same two systems are combined inthe hybrid scheme, good predictions are obtained for asubstantial duration of about 4 Lyapunov times. (By a‘Lyapunov time’ we mean the typical time required foran e-fold increase of the distance between two initiallyclose chaotic orbits; see Sec. IV and V.)
The rest of this paper is organized as follows. In Sec. II,we provide an overview of our methods for prediction byusing a knowledge-based model and for prediction by ex-clusively using a reservoir computing model (henceforthreferred to as the reservoir-only model). We then de-scribe the hybrid scheme that combines the knowledge-based model with the reservoir-only model. In Sec. III,we describe our specific implementation of the reser-voir computing scheme and the proposed hybrid schemeusing a recurrent-neural-network implementation of thereservoir computer. In Sec. IV and V, we demon-strate our hybrid prediction approach using two exam-ples, namely, the low-dimensional Lorenz system16 andthe high dimensional, spatiotemporal chaotic Kuramoto-Sivashinsky system17,18.
II. PREDICTION METHODS
Input Layer
Training
Prediction
Reservoir
Output Layer
PredictionPrediction
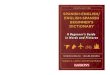
FIG. 1. Schematic diagram of reservoir-only prediction setup.
We consider a dynamical system for which there isavailable a time series of a set of M measurable state-dependent quantities, which we represent as the M di-mensional vector u(t). As discussed earlier, we propose ahybrid scheme to make predictions of the dynamics of thesystem by combining an approximate knowledge-basedprediction via an approximate model with a purely data-driven prediction scheme that uses machine learning. Wewill compare predictions made using our hybrid schemewith the predictions of the approximate knowledge-basedmodel alone and predictions made by exclusively usingthe reservoir computing model.
A. Knowledge-Based Model
We obtain predictions from the approximateknowledge-based model acting alone assuming thatthe knowledge-based model is capable of forecasting u(t)for t > 0 based on an initial condition u(0) and possiblyrecent values of u(t) for t < 0. For notational use inour hybrid scheme (Sec. II C), we denote integration ofthe knowledge-based model forward in time by a timeduration ∆t as,
uK(t+ ∆t) = K [u(t)] ≈ u(t+ ∆t). (1)
We emphasize that the knowledge-based one-step-aheadpredictor K is imperfect and may have substantial un-wanted error. In our test examples in Secs. IV and V weconsider prediction of continuous-time systems and takethe prediction system time step ∆t to be small comparedto the typical time scale over which the continuous-timesystem changes. We note that while a single predictiontime step (∆t) is small, we are interested in predictingfor a large number of time steps.
B. Reservoir-Only Model
For the machine learning approach, we assume theknowledge of u(t) for times t from −T to 0. This datawill be used to train the machine learning model for thepurpose of making predictions of u(t) for t > 0. In par-ticular we use a reservoir computer, described as follows.
A reservoir computer (Fig. 1) is constructed with anartificial high dimensional dynamical system, known asthe reservoir whose state is represented by the Dr di-mensional vector r(t), Dr � M . We note that ideallythe forecasting accuracy of a reservoir-only predictionmodel increases with Dr, but that Dr is typically lim-ited by computational cost considerations. The reser-voir is coupled to an input through an Input-to-Reservoircoupling Rin [u(t)] which maps the M -dimensional inputvector, u, at time t, to each of the Dr reservoir statevariables. The output is defined through a Reservoir-to-Output coupling Rout [r(t),p], where p is a large set ofadjustable parameters. In the task of prediction of state
![Page 3: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/3.jpg)
3
variables of dynamical systems the reservoir computer isused in two different configurations. One of the config-urations we call the ‘training’ phase, and the other onewe called the ‘prediction’ phase. In the training phase,the reservoir is configured according to Fig. 1 with theswitch in the position labeled ‘Training’. In this phase,the reservoir evolves from t = −T to t = 0 according tothe equation,
r(t+ ∆t) = GR
[Rin [u(t)] , r(t)
], (2)
where the nonlinear function GR and the (usually lin-
ear) function Rin depend on the choice of the reservoirimplementation. Next, we make a particular choice of theparameters p such that the output function Rout [r(t),p]satisfies,
Rout [r(t),p] ≈ u(t),
for −T < t ≤ 0. We achieve this by minimizing the errorbetween uR(t) = Rout [r(t),p] and u(t) for −T < t ≤ 0using a suitable error metric and optimization algorithmon the adjustable parameter vector p.
In the prediction phase, for t ≥ 0, the switch is placedin position labeled ‘Prediction’ indicated in Fig. 1. Thereservoir now evolves autonomously with a feedback loopaccording to the equation,
r(t+ ∆t) = GR
[Rin [uR(t)] , r(t)
], (3)
where, uR(t) = Rout [r(t),p] is taken as the predictionfrom this reservoir-only approach. It has been shown7
that this procedure can successfully generate a time se-ries uR(t) that approximates the true state u(t) for t > 0.Thus uR(t) is our reservoir-based prediction of the evo-lution of u(t). If, as assumed henceforth, the dynamicalsystem being predicted is chaotic, the exponential diver-gence of initial conditions in the dynamical system im-plies that any prediction scheme will only be able to yieldan accurate prediction for a limited amount of time.
C. Hybrid Scheme
The hybrid approach we propose combines both theknowledge-based model and the reservoir-only model.Our hybrid approach is outlined in the schematic dia-gram shown in Fig. 2.
As in the reservoir-only model, the hybrid scheme hastwo phases, the training phase and the prediction phase.In the training phase (with the switch in position la-beled ‘Training’ in Fig. 2), the training data u(t) fromt = −T to t = 0 is fed into both the knowledge-basedpredictor and the reservoir. At each time t, the outputof the knowledge-based predictor is the one-step aheadprediction K [u(t)]. The reservoir evolves according tothe equation
BasedKnowledge-
Model
Input LayerOutput Layer
Training
Prediction
Reservoir
ngaining
onPredictionPrediction
FIG. 2. Schematic diagram of the hybrid prediction setup.
r(t+ ∆t) = GH
[r(t), Hin [K [u(t)] ,u(t)]
](4)
for −T ≤ t ≤ 0, where the (usually linear) function Hin
couples the reservoir network with the inputs to the reser-voir, in this case u(t) and K [u(t)]. As earlier, we modifya set of adjustable parameters p in a predefined outputfunction so that
Hout [K [u(t−∆t)] , r(t),p] ≈ u(t) (5)
for −T < t ≤ 0, which is achieved by minimizingthe error between the right-hand side and the left-handside of Eq. (5), as discussed earlier (Sec. II B) for thereservoir-only approach. Note that both the knowledge-based model and the reservoir feed into the output layer(Eq. (5) and Fig. 2) so that the training can be thought ofas optimally deciding on how to weight the informationfrom the knowledge-based and reservoir components.
For the prediction phase (the switch is placed in the po-sition labeled ‘Prediction’ in Fig. 2) the feedback loop isclosed allowing the system to evolve autonomously. Thedynamics of the system will then be given by
r(t+ ∆t) = GH
[r(t), Hin [K [uH(t)] , uH(t)]
], (6)
where uH(t) = Hout [K [uH(t−∆t)] , r(t),p], is the pre-diction of the prediction of the hybrid system.
III. IMPLEMENTATION
In this section we provide details of our specific imple-mentation and discuss the prediction performance met-rics we use to assess and compare the various predictionschemes. Our implementation of the reservoir computerclosely follows Ref.7. Note that, in the reservoir training,no knowledge of the dynamics and details of the reser-voir system is used (this contrasts with other machinelearning techniques10): only the −T ≤ t ≤ 0 trainingdata is used (u(t), r(t), and, in the case of the hybrid,
![Page 4: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/4.jpg)
4
K[u(t)]). This feature implies that reservoir computers,as well as the reservoir-based hybrid are insensitive to thespecific reservoir implementation. In this paper, our illus-trative implementation of the reservoir computer uses anartificial neural network for the realization of the reser-voir. We mention, however, that alternative implemen-tation strategies such as utilizing nonlinear optical de-vices12–14 and Field Programmable Gate Arrays15 canalso be used to construct the reservoir component of ourhybrid scheme (Fig. 2) and offer potential advantages,particularly with respect to speed.
A. Reservoir-Only and Hybrid Implementations
Here we consider that the high-dimensional reservoir isimplemented by a large, low degree Erdos-Renyi networkof Dr nonlinear, neuron-like units in which the network isdescribed by an adjacency matrix A (we stress that thefollowing implementations are somewhat arbitrary, andare intended as illustrating typical results that might beexpected). The network is constructed to have an av-erage degree denoted by 〈d〉, and the nonzero elementsof A, representing the edge weights in the network, areinitially chosen independently from the uniform distri-bution over the interval [−1, 1]. All the edge weights inthe network are then uniformly scaled via multiplicationof the adjacency matrix by a constant factor to set thelargest magnitude eigenvalue of the matrix to a quan-tity ρ, which is called the ‘spectral radius’ of A. Thestate of the reservoir, given by the vector r(t), consistsof the components rj for 1 ≤ j ≤ Dr where rj(t) denotesthe scalar state of the jth node in the network. Whenevaluating prediction based purely on a reservoir systemalone, the reservoir is coupled to theM dimensional inputthrough a Dr×M dimensional matrix Win, such that inEq. (2) Rin [u(t)] = Winu(t), and each row of the matrixWin has exactly one randomly chosen nonzero element.Each nonzero element of the matrix is independently cho-sen from the uniform distribution on the interval [−σ, σ].We choose the hyperbolic tangent function for the formof the nonlinearity at the nodes, so that the specific train-ing phase equation for our reservoir setup correspondingto Eq. (2) is
r(t+ ∆t) = tanh [Ar(t) + Winu(t)] , (7)
where the hyperbolic tangent applied on a vector is de-fined as the vector whose components are the hyperbolictangent function acting on each element of the argumentvector individually.
We choose the form of the output function to beRout(r,p) = Woutr
?, in which the output parameters(previously symbolically represented by p) will hence-forth be take to be the elements of the matrix Wout,and the vector r? is defined such that r?j equals rj for
odd j, and equals r2j for even j (it was empirically
found that this choice of r? works well for our exam-ples in both Sec. IV and Sec. V, see also9,19). We
run the reservoir for −T ≤ t ≤ 0 with the switch inFig. 1 in the ‘Training’ position. We then minimize∑T/∆t
m=1 ‖ u(−m∆t)−uR(−m∆t)‖2 with respect to Wout,where uR is now Woutr
?. Since uR depends linearly onthe elements of Wout, this minimization is a standard lin-ear regression problem, and we use Tikhonov regularizedlinear regression20. We denote the regularization param-eter in the regression by β and employ a small positivevalue of β to prevent over fitting of the training data.
Once the output parameters (the matrix elements ofWout) are determined, we run the system in the configu-ration depicted in Fig. 1 with the switch in the ‘Predic-tion’ position according to the equations,
uR(t) = Woutr?(t) (8)
r(t+ ∆t) = tanh [Ar(t) + WinuR(t)] , (9)
corresponding to Eq. (3). Here uR(t) denotes the predic-tion of u(t) for t > 0 made by the reservoir-only model.
Next, we describe the implementation of the hybridprediction scheme. The reservoir component of our hy-brid scheme is implemented in the same fashion as in thereservoir-only model given above. In the training phasefor −T < t ≤ 0, when the switch in Fig. 2 is in the‘Training’ position, the specific form of Eq. (4) used isgiven by
r(t+ ∆t) = tanh
[Ar(t) + Win
(K [u(t)]
u(t)
)](10)
As earlier, we choose the matrix Win (which is nowDr × (2M) dimensional) to have exactly one nonzero el-ement in each row. The nonzero elements are indepen-dently chosen from the uniform distribution on the inter-val [−σ, σ]. Each nonzero element can be interpreted tocorrespond to a connection to a particular reservoir node.These nonzero elements are randomly chosen such thata fraction γ of the reservoir nodes are connected exclu-sively to the raw input u(t) and the remaining fractionare connected exclusively to the the output of the modelbased predictor K[u(t)].
Similar to the reservoir-only case, we choose the formof the output function to be
Hout [K [u(t−∆t)] , r(t),p] = Wout
(K [u(t−∆t)]
r?(t)
),
(11)
Where, as in the reservoir-only case, Wout now plays therole of p. Again, as in the reservoir-only case, Wout isdetermined via Tikhonov regularized regression.
In the prediction phase for t > 0, when the switch inFig. 2 is in position labeled ‘Prediction’, the input u(t)is replaced by the output at the previous time step andthe equation analogous to Eq. (6) is given by,
uH(t) = Wout
(K [u(t)]r?(t)
), (12)
r(t+ ∆t) = tanh
[Ar(t) + Win
(K [uH ]
uH
)]. (13)
![Page 5: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/5.jpg)
5
The vector time series uH(t) denotes the prediction ofu(t) for t > 0 made by our hybrid scheme.
B. Training Reusability
In the prediction phase, t > 0, chaos combined witha small initial condition error, ‖u(0) − u(0)‖ � ‖u(0)‖,and imperfect reproduction of the true system dynamicsby the prediction method lead to a roughly exponentialincrease of the prediction error ‖u(t)− u(t)‖ as the pre-diction time t increases. Eventually, the prediction errorbecomes unacceptably large. By choosing a value forthe largest acceptable prediction error, one can define a“valid time” tv for a particular trial. As our examples inthe following sections show, tv is typically much less thanthe necessary duration T of the training data required foreither reservoir-only prediction or for prediction by ourhybrid scheme. However, it is important to point outthat the reservoir and hybrid schemes have the propertyof training reusability. That is, once the output param-eters p (or Wout) are obtained using the training datain −T ≤ t ≤ 0, the same p can be used over and overagain for subsequent predictions, without retraining p.For example, say that we now desire another predictionstarting at some later time t0 > 0. In order to do this,the reservoir system (Fig. 1) or the hybrid system (Fig. 2)with the predetermined p, is first run with the switch inthe ‘Training’ position for a time, (t0 − ξ) < t < t0.This is done in order to resynchronize the reservoir tothe dynamics of the true system, so that the time t = t0prediction system output, u(t0), is brought very close tothe true value, u(t0), of the process to be predicted fort > t0 (i.e., the reservoir state is resynchronized to thedynamics of the chaotic process that is to be predicted).Then, at time t = t0, the switch (Figs. 1 and 2) is movedto the ‘Prediction’ position, and the output uR or uH istaken as the prediction for t > t0. We find that with ppredetermined, the time required for re-synchronizationξ turns out to be very small compared to tv, which is inturn small compared to the training time T .
C. Assessments of Prediction Methods
We wish to compare the effectiveness of different pre-diction schemes (knowledge-based, reservoir-only, or hy-brid). As previously mentioned, for each independentprediction, we quantify the duration of accurate predic-tion with the corresponding “valid time”, denoted tv, de-fined as the elapsed time before the normalized error E(t)first exceeds some value f , 0 < f < 1, E(tv) = f , where
E(t) =||u(t)− u(t)||〈||u(t)||2〉1/2
, (14)
and the symbol u(t) now stands for the prediction [ei-ther uK(t), uR(t) or uH(t) as obtained by either of the
three prediction methods (knowledge-based, reservoir-based, or hybrid)].
In what follows we use f = 0.4. We test all threemethods on 20 disjoint time intervals of length τ in along run of the true dynamical system. For each pre-diction method, we evaluate the valid time over manyindependent prediction trials. Further, for the reservoir-only prediction and the hybrid schemes, we use 32 differ-ent random realizations of A and Win, for each of whichwe separately determine the training output parametersWout; then we predict on each of the 20 time intervals foreach such random realization, taking advantage of train-ing reusability (Sec. III B). Thus, there are a total of 640different trials for the reservoir-only and hybrid systemmethods, and 20 trials for the knowledge-based method.We use the median valid time across all such trials as ameasure of the quality of prediction of the correspondingscheme, and the span between the first and third quar-tiles of the tv values as a measure of variation in thismetric of the prediction quality.
IV. LORENZ SYSTEM
The Lorenz system16 is described by the equations,
dx
dt= −ax+ ay,
dy
dt= bx− y − xz, (15)
dz
dt= −cz + xy,
For our “true” dynamical system, we use a = 10,b = 28, c = 8/3 and we generate a long trajectory with∆t = 0.1. For our knowledge-based predictor, we use an‘imperfect’ version of the Lorenz equations to representan approximate, imperfect model that might be encoun-tered in a real life situation. Our imperfect model differsfrom the true Lorenz system given in Eq. (15) only via achange in the system parameter b in Eq. (15) to b(1 + ε).The error parameter ε is thus a dimensionless quantifi-cation of the discrepancy between our knowledge-basedpredictor and the ‘true’ Lorenz system. We emphasizethat, although we simulate model error by a shift of theparameter b, we view this to represent a general modelerror of unknown form. This is reflected by the factthat our reservoir and hybrid methods do not incorpo-rate knowledge that the system error in our experimentsresults from an imperfect parameter value of a systemwith Lorenz form.
Next, for the reservoir computing component of thehybrid scheme, we construct a network-based reservoiras discussed in Sec. II B for various reservoir sizes Dr
and with the parameters listed in Table I.Figure 3 shows an illustrative example of one predic-
tion trial using the hybrid method. The horizontal axis isthe time in units of the Lyapunov time λ−1
max, where λmax
denotes the largest Lyapunov exponent of the system,
![Page 6: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/6.jpg)
6
Parameter Value Parameter Value
ρ 0.4 T 100
〈d〉 3 γ 0.5
σ 0.15 τ 250
∆t 0.1 ξ 10
TABLE I. Reservoir parameters ρ, 〈d〉, σ, ∆t, training timeT , hybrid parameter γ, and evaluation parameters τ , ξ forthe Lorenz system prediction.
Eqs. (15). The vertical dashed lines in Fig. 3 indicatethe valid time tv (Sec. III C) at which E(t) (Eq. (14))first reaches the value f = 0.4. The valid time determi-nation for this example with ε = 0.05 and Dr = 500 isillustrated in Fig. 4. Notice that we get low predictionerror for about 10 Lyapunov times.
-20
0
20
-20
0
20
20
40
1086420 12 14 16 18 20
FIG. 3. Prediction of the Lorenz system using the hybridprediction setup. The blue line shows the true state of theLorenz system and the red dashed line shows the prediction.Prediction begins at t = 0. The vertical black dashed linemarks the point where this prediction is no longer consideredvalid by the valid time metric with f = 0.4. The error in theapproximate model used in the knowledge-based componentof the hybrid scheme is ε = 0.05.
1086420 12 14 16 18 20
0.5
1.0
1.5
0
FIG. 4. Normalized error E(t) versus time of the Lorenz pre-diction trial shown in Fig. 3. The prediction error remainsbelow the defined threshold (E(t) < 0.4) for about 12 Lya-punov times.
The red upper curve in Fig. 5 shows the dependence onreservoir size Dr of results for the median valid time (inunits of Lyapunov time, λmaxt, and with f = 0.4) of thepredictions from a hybrid scheme using a reservoir systemcombined with our imperfect model with an error param-eter of ε = 0.05. The error bars span the first and thirdquartiles of our trials which are generated as described inSec. III C. The black middle curve in Fig. 5 shows the cor-
responding results for predictions using the reservoir-onlymodel. The blue lower curve in Fig. 5 shows the result forprediction using only the ε = 0.05 imperfect knowledge-based model (since this result does not depend on Dr,the blue curve is horizontal and the error bars are thesame at each value of Dr). Note that, even though theknowledge-based prediction alone is very bad, when usedin the hybrid, it results in a large prediction improvementrelative to the reservoir-only prediction. Moreover, thisimprovement is seen for all values of the reservoir sizestested. Note also that the valid time for the hybrid with areservoir size of Dr = 50 is comparable to the valid timefor a reservoir-only scheme at Dr = 500. This suggeststhat our hybrid method can substantially reduce reser-voir computational expense even with a knowledge-basedmodel that has low predictive power on its own.
Fig. 6 shows the dependence of prediction performanceon the model error ε with the reservoir size held fixedat Dr = 50. For the wide range of the error ε we havetested, the hybrid performance is much better than eitherits knowledge-based component alone or reservoir-onlycomponent. Figures 5 and 6, taken together, suggest thepotential robustness of the utility of the hybrid approach.
FIG. 5. Reservoir size (Dr) dependence of the median validtime using the hybrid prediction scheme (red upper plot), thereservoir-only (black middle plot) and the knowledge-basedmodel only methods. The model error is fixed at ε = 0.05.Since the knowledge based model (blue) does not depend onDr, its plot is a horizontal line. Error bars span the rangebetween the 1st and 3rd quartiles of the trials.
V. KURAMOTO-SIVASHINSKY EQUATIONS
In this example, we test how well our hybrid method,using an inaccurate knowledge-based model combinedwith a relatively small reservoir, can predict systems thatexhibit high dimensional spatiotemporal chaos. Specifi-cally, we use simulated data from the one-dimensionalKuramoto-Sivashinsky (KS) equation for y(x, t),
yt = −yyx − yxx − yxxxx (16)
![Page 7: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/7.jpg)
7
FIG. 6. Valid times for different values of model error (ε) withf = 0.4. The reservoir size is fixed at Dr = 50. Plotted pointsrepresent the median and error bars span the range betweenthe 1st and 3rd quartiles. The meaning of the colors is thesame as in Fig. 5. Since the reservoir only scheme (black)does not depend on ε, its plot is a horizontal line. Similar toFig. 5, the small reservoir alone cannot predict well for a longtime, but the hybrid model, which combines the inaccurateknowledge-based model and the small reservoir performs wellacross a broad range of ε.
Our simulation calculates y(x, t) on a uniformly spacedgrid with spatially periodic boundary conditions suchthat y(x, t) = y(x + L, t), with a periodicity length ofL = 35, a grid size of Q = 64 grid points (giving a in-tergrid spacing of ∆x = L
Q ≈ 0.547), and a sampling
time of ∆t = 0.25. For these parameters we foundthat the maximum Lyapunov exponent, λmax, is positive(λmax ≈ 0.07), indicating that this system is chaotic. Wedefine a vector of y(x, t) values at each grid point as theinput to each of our predictors:
u(t) =
[y
(L
Q, t
), y
(2L
Q, t
), . . . , y (L, t)
]T. (17)
For our approximate knowledge-based predictor, weuse the same simulation method as the originalKuramoto-Sivashinsky equations with an error param-eter ε added to the coefficient of the second derivativeterm as follows,
yt = −yyx − (1 + ε)yxx − yxxxx. (18)
For sufficiently small ε, Eq. (18) corresponds to a veryaccurate knowledge-based model of the true KS system,which becomes less and less accurate as ε is increased.
Illustrations of our main result are shown in Figs. 7 and8, where we use the parameters in Table II. In the toppanel of Fig. 7, we plot a computed solution of Eq. (16)which we regard as the true dynamics of a system tobe predicted; the spatial coordinate x ∈ [0, L] is plottedvertically, the time in Lyapunov units (λmaxt) is plottedhorizontally, and the value of y(x, t) is color coded withthe most positive and most negative y values indicated byred and blue, respectively. Below this top panel are six
panels labeled (a-f) in which the color coded quantity isthe prediction error y(x, t)−y(x, t) of different predictionsy(x, t). In panels (a), (b) and (c), we consider a case (ε =0.01, Dr = 8000) where both the knowledge-based model(panel (a)) and the reservoir-only predictor (panel (b))are fairly accurate; panel (c) shows the hybrid predictionerror. In panels (d), (e), and (f), we consider a differentcase (ε = 0.1, Dr = 500) where both the knowledge-basedmodel (panel (d)) and the reservoir-only predictor (panel(e)) are relatively inaccurate; panel (f) shows the hybridprediction error. In our color coding, low prediction errorcorresponds to the green color. The vertical solid linesdenote the valid times for this run with f = 0.4.
Parameter Value Parameter Value
ρ 0.4 T 5000
〈d〉 3 γ 0.5
σ 1.0 τ 250
∆t 0.25 ξ 10
TABLE II. Reservoir parameters ρ, 〈d〉, σ, ∆t, training timeT , hybrid parameter γ, and evaluation parameters τ , ξ forthe KS system prediction.
We note from Figs. 7(a,b,c), that even when theknowledge-based model prediction is valid for about aslong as the reservoir-only prediction, our hybrid schemecan significantly outperform both its components. Ad-ditionally, as in our Lorenz system example (Fig. 6for ε & 0.2) we see from Figs. 7(d,e,f) that in theparameter regimes where the KS reservoir-only modeland knowledge-based model both show very poor per-formance, the hybrid of these low performing meth-ods can still predict for a longer time than a muchmore computationally expensive reservoir-only imple-mentation (Fig. 7(b)).
This latter remarkable result is reinforced by Fig. 8(a),which shows that even for very large error, ε = 1, suchthat the model is totally ineffective, the hybrid of thesetwo methods is able to predict for a significant amount oftime using a relatively small reservoir. This implies that anon-viable model can be made viable via the addition of areservoir component of modest size. Further Figs. 8(b,c)show that even if one has a model that can outperformthe reservoir prediction, as is the case for ε = 0.01 formost reservoir sizes, one can still benefit from a reservoirusing our hybrid technique.
VI. CONCLUSIONS
In this paper we present a method for the predictionof chaotic dynamical systems that hybridizes reservoircomputing and knowledge-based prediction. Our mainresults are:
1. Our hybrid technique consistently outperformsits component reservoir-only or knowledge-based
![Page 8: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/8.jpg)
8
(a) Low Error Knowledge-based Predictor
(b) Large Reservoir
(c) Hybrid (a+b)
(d) High Error Knowledge-based Predictor
(e) Small Reservoir
(f ) Hybrid (d+e)
Low
Err
or
Kn
ow
led
ge
-ba
sed
Mo
de
l
an
d L
arg
e R
ese
rvo
ir
Hig
h E
rro
r K
no
wle
dg
e-b
ase
d M
od
el
an
d S
ma
ll R
ese
rvo
ir
FIG. 7. The topmost panel shows the true solution of the KS equation (Eq. (16)). Each of the six panels labeled (a) through(f) shows the difference between the true state of the KS system and the prediction made by a specific prediction scheme. Thethree panels (a), (b), and (c) respectively show the results for a low error knowledge-based model (ε = 0.01), a reservoir-onlyprediction scheme with a large reservoir (Dr = 8000), and the hybrid scheme composed of (Dr = 8000, ε = 0.01). The threepanels, (d), (e), and (f) respectively show the corresponding results for a highly imperfect knowledge-based model (ε = 0.1), areservoir-only prediction scheme using a small reservoir (Dr = 500), and the hybrid scheme with (Dr = 500, ε = 0.1).
(a) (b)
(c)
FIG. 8. Each of the three panels (a), (b), and (c) shows a comparison of the KS system prediction performance of the reservoir-only scheme (black), the knowledge-based model (blue) and the hybrid scheme (red). The median valid time in Lyapunovunits (λmaxtv) is plotted against the size of the reservoir used in the hybrid scheme and the reservoir-only scheme. Sincethe knowledge-based model does not use a reservoir, its valid time does not vary with the reservoir size. The error in theknowledge-based model is ε = 1 in panel (a), ε = 0.1 in panel (b) and ε = 0.01 in panel (c).
![Page 9: arXiv:1803.04779v1 [cs.LG] 9 Mar 2018 · diction scheme with signi cantly enhanced potential for ... the form of whose imperfections is unknown. Ex- ... [cs.LG] 9 Mar 2018. 2](https://reader030.pdfslide.us/reader030/viewer/2022022015/5b4fa5c87f8b9a206e8cda6c/html5/page/9.jpg)
9
model prediction methods in the duration of itsability to accurately predict, for both the Lorenzsystem and the spatiotemporal chaotic Kuramoto-Sivashinsky equations.
2. Our hybrid technique robustly yields improved per-formance even when the reservoir-only predictorand the knowledge-based model are so flawed thatthey do not make accurate predictions on their own.
3. Even when the knowledge-based model used in thehybrid is significantly flawed, the hybrid techniquecan, at small reservoir sizes, make predictions com-parable to those made by much larger reservoir-only models, which can be used to save computa-tional resources.
4. Both the hybrid scheme and the reservoir-onlymodel have the property of “training reusability”(Sec. III B), meaning that once trained, they canmake any number of subsequent predictions (with-out retraining each time) by preceding each suchprediction with a short run in the training config-uration (see Figs. 1 and 2) in order to resynchro-nize the reservoir dynamics with the dynamics tobe predicted.
VII. ACKNOWLEDGMENT
This work was supported by ARO (W911NF-12-1-0101), NSF (PHY-1461089) and DARPA.
1T. Shon and J. Moon, “A hybrid machine learning approach tonetwork anomaly detection,” Information Sciences 177, 3799–3821 (2007).
2C.-F. Tsai and M.-L. Chen, “Credit rating by hybrid machinelearning techniques,” Applied soft computing 10, 374–380 (2010).
3D. C. Psichogios and L. H. Ungar, “A hybrid neural network-first principles approach to process modeling,” AIChE Journal38, 1499–1511 (1992).
4H. Jaeger, “The echo state approach to analysing and training re-current neural networks-with an erratum note,” Bonn, Germany:German National Research Center for Information TechnologyGMD Technical Report 148, 13 (2001).
5W. Maass, T. Natschlager, and H. Markram, “Real-time com-puting without stable states: A new framework for neural com-putation based on perturbations,” Neural computation 14, 2531–2560 (2002).
6M. Lukosevicius and H. Jaeger, “Reservoir computing approachesto recurrent neural network training,” Computer Science Review3, 127–149 (2009).
7H. Jaeger and H. Haas, “Harnessing nonlinearity: Predictingchaotic systems and saving energy in wireless communication,”science 304, 78–80 (2004).
8J. Pathak, Z. Lu, B. R. Hunt, M. Girvan, and E. Ott, “Usingmachine learning to replicate chaotic attractors and calculate lya-punov exponents from data,” Chaos: An Interdisciplinary Jour-nal of Nonlinear Science 27, 121102 (2017).
9J. Pathak, B. Hunt, M. Girvan, Z. Lu, and E. Ott, “Model-freeprediction of large spatiotemporally chaotic systems from data:A reservoir computing approach,” Phys. Rev. Lett. 120, 024102(2018).
10I. Goodfellow, Y. Bengio, and A. Courville, Deep learning (MITpress, 2016).
11S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural computation 9, 1735–1780 (1997).
12L. Larger, M. C. Soriano, D. Brunner, L. Appeltant, J. M.Gutierrez, L. Pesquera, C. R. Mirasso, and I. Fischer, “Photonicinformation processing beyond turing: an optoelectronic imple-mentation of reservoir computing,” Optics express 20, 3241–3249(2012).
13L. Larger, A. Baylon-Fuentes, R. Martinenghi, V. S. Udaltsov,Y. K. Chembo, and M. Jacquot, “High-speed photonic reservoircomputing using a time-delay-based architecture: Million wordsper second classification,” Physical Review X 7, 011015 (2017).
14P. Antonik, M. Haelterman, and S. Massar, “Brain-inspiredphotonic signal processor for generating periodic patterns andemulating chaotic systems,” Physical Review Applied 7, 054014(2017).
15N. D. Haynes, M. C. Soriano, D. P. Rosin, I. Fischer, and D. J.Gauthier, “Reservoir computing with a single time-delay au-tonomous boolean node,” Physical Review E 91, 020801 (2015).
16E. N. Lorenz, “Deterministic nonperiodic flow,” Journal of theatmospheric sciences 20, 130–141 (1963).
17Y. Kuramoto and T. Tsuzuki, “Persistent propagation of concen-tration waves in dissipative media far from thermal equilibrium,”Progress of theoretical physics 55, 356–369 (1976).
18G. Sivashinsky, “Nonlinear analysis of hydrodynamic instabilityin laminar flamesi. derivation of basic equations,” Acta astronau-tica 4, 1177–1206 (1977).
19Z. Lu, J. Pathak, B. Hunt, M. Girvan, R. Brockett, and E. Ott,“Reservoir observers: Model-free inference of unmeasured vari-ables in chaotic systems,” Chaos: An Interdisciplinary Journalof Nonlinear Science 27, 041102 (2017).
20N. Tikhonov, Andreı, V. I. Arsenin, and F. John, Solutions ofill-posed problems, Vol. 14 (Winston Washington, DC, 1977).

![March 22, 2016 arXiv:1603.02752v2 [cs.LG] 18 Mar 2016 · arXiv:1603.02752v2 [cs.LG] 18 Mar 2016 Best-of-K Bandits Max Simchowitz msimchow@eecs.berkeley.edu Kevin Jamieson kjamieson@eecs.berkeley.edu](https://img.pdfslide.us/doc/110x75/604257adeb65d547fe24a710/march-22-2016-arxiv160302752v2-cslg-18-mar-2016-arxiv160302752v2-cslg.jpg)
![arXiv:2007.11934v2 [cs.LG] 25 Mar 2021](https://img.pdfslide.us/doc/110x75/61bd0dc961276e740b0ee121/arxiv200711934v2-cslg-25-mar-2021.jpg)
![arXiv:1610.01283v4 [cs.LG] 3 Mar 2017](https://img.pdfslide.us/doc/110x75/61ce5d15a749ef62f20a43ac/arxiv161001283v4-cslg-3-mar-2017.jpg)

![A arXiv:2012.03295v3 [cs.LG] 15 Mar 2021](https://img.pdfslide.us/doc/110x75/62da818eee87d45e49079884/a-arxiv201203295v3-cslg-15-mar-2021.jpg)
![arXiv:2103.03404v1 [cs.LG] 5 Mar 2021](https://img.pdfslide.us/doc/110x75/616a153e11a7b741a34e9e5d/arxiv210303404v1-cslg-5-mar-2021.jpg)
![arXiv:2003.04078v2 [cs.LG] 15 Mar 2020](https://img.pdfslide.us/doc/110x75/61c6775e03f564131d61d306/arxiv200304078v2-cslg-15-mar-2020.jpg)
![arXiv:1405.4544v2 [cs.LG] 16 Mar 2015](https://img.pdfslide.us/doc/110x75/6170eb9d5051860a0c259804/arxiv14054544v2-cslg-16-mar-2015.jpg)
![arXiv:1903.08129v1 [cs.LG] 19 Mar 2019](https://img.pdfslide.us/doc/110x75/6195f7933cabd225326f5459/arxiv190308129v1-cslg-19-mar-2019.jpg)
![arXiv:2102.05188v2 [cs.LG] 19 Mar 2021](https://img.pdfslide.us/doc/110x75/61f0965aa02c3a70c3562e95/arxiv210205188v2-cslg-19-mar-2021.jpg)
![arXiv:2010.02317v3 [cs.LG] 18 Mar 2021](https://img.pdfslide.us/doc/110x75/61b501b3d608166a720f62ee/arxiv201002317v3-cslg-18-mar-2021.jpg)
![arXiv:2103.06624v1 [cs.LG] 11 Mar 2021](https://img.pdfslide.us/doc/110x75/61723ed217f5801a9b2586c8/arxiv210306624v1-cslg-11-mar-2021.jpg)
![arXiv:1812.11832v3 [cs.LG] 3 Mar 2019](https://img.pdfslide.us/doc/110x75/618416f7e4372a3df209efe6/arxiv181211832v3-cslg-3-mar-2019.jpg)
![A arXiv:1810.08313v2 [cs.LG] 7 Mar 2019](https://img.pdfslide.us/doc/110x75/6276595282ac9c6ccb3d44cf/a-arxiv181008313v2-cslg-7-mar-2019.jpg)
![Learning arXiv:1807.02802v2 [cs.LG] 25 Mar 2019](https://img.pdfslide.us/doc/110x75/6178584580bfa034973d61fe/learning-arxiv180702802v2-cslg-25-mar-2019.jpg)

![arXiv:1903.04610v1 [cs.LG] 11 Mar 2019](https://img.pdfslide.us/doc/110x75/621bde31d5426c35ce5a42b3/arxiv190304610v1-cslg-11-mar-2019.jpg)

![arXiv:1903.01454v2 [cs.LG] 8 Mar 2019](https://img.pdfslide.us/doc/110x75/6169b95511a7b741a34aa71d/arxiv190301454v2-cslg-8-mar-2019.jpg)
![arXiv:1904.00687v3 [cs.LG] 4 Mar 2020](https://img.pdfslide.us/doc/110x75/617e3ffe568fb302c15451d1/arxiv190400687v3-cslg-4-mar-2020.jpg)
![Abstract arXiv:2103.03236v1 [cs.LG] 4 Mar 2021](https://img.pdfslide.us/doc/110x75/617455a20cf338053b4bf1b2/abstract-arxiv210303236v1-cslg-4-mar-2021.jpg)
![Abstract arXiv:1803.10227v1 [cs.LG] 27 Mar 2018](https://img.pdfslide.us/doc/110x75/6290b1b3ae6aac38d2668068/abstract-arxiv180310227v1-cslg-27-mar-2018.jpg)

![March 24, 2021 arXiv:2103.12690v1 [cs.LG] 23 Mar 2021](https://img.pdfslide.us/doc/110x75/620f750892810854ff275df7/march-24-2021-arxiv210312690v1-cslg-23-mar-2021.jpg)
![@rochester.edu arXiv:1903.11748v1 [cs.LG] 28 Mar 2019](https://img.pdfslide.us/doc/110x75/623f901ac1b72f57ec5f5d7e/-arxiv190311748v1-cslg-28-mar-2019.jpg)
![1 arXiv:2103.13655v1 [cs.LG] 25 Mar 2021](https://img.pdfslide.us/doc/110x75/61bd4deb61276e740b11761e/1-arxiv210313655v1-cslg-25-mar-2021.jpg)
![arXiv:1002.4802v2 [cs.LG] 12 Mar 2010](https://img.pdfslide.us/doc/110x75/6292e15725614f6b7c5b1f9a/arxiv10024802v2-cslg-12-mar-2010.jpg)