-
Designing large-eddy simulation of the turbulent boundary layer
to capturelaw-of-the-wall scalingJames G. Brasseur and Tie Wei
Citation: Phys. Fluids 22, 021303 (2010); doi: 10.1063/1.3319073
View online: http://dx.doi.org/10.1063/1.3319073 View Table of
Contents: http://pof.aip.org/resource/1/PHFLE6/v22/i2 Published by
the American Institute of Physics.
Related ArticlesLarge-eddy simulation of turbulent channel flow
using explicit filtering and dynamic mixed models Phys. Fluids 24,
085105 (2012) Anisotropy in pair dispersion of inertial particles
in turbulent channel flow Phys. Fluids 24, 073305 (2012) About
turbulence statistics in the outer part of a boundary layer
developing over two-dimensional surfaceroughness Phys. Fluids 24,
075112 (2012) Accounting for uncertainty in the analysis of overlap
layer mean velocity models Phys. Fluids 24, 075108 (2012) Large
eddy simulation of smooth-wall, transitional and fully rough-wall
channel flow Phys. Fluids 24, 075103 (2012)
Additional information on Phys. FluidsJournal Homepage:
http://pof.aip.org/ Journal Information:
http://pof.aip.org/about/about_the_journal Top downloads:
http://pof.aip.org/features/most_downloaded Information for
Authors: http://pof.aip.org/authors
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
Designing large-eddy simulation of the turbulent boundary
layerto capture law-of-the-wall scalinga
James G. Brasseurb and Tie Wei (Department of Mechanical
Engineering, The Pennsylvania State University, University
Park,Pennsylvania 16802, USA
Received 18 September 2009; accepted 5 January 2010; published
online 25 February 2010
Law-of-the-wall LOTW scaling implies that at sufficiently high
Reynolds numbers the meanvelocity gradient U /z in the turbulent
boundary layer should scale on u /z in theinertia-dominated surface
layer, where u is the friction velocity and z is the distance from
thesurface. In 1992, Mason and Thomson pointed out that large-eddy
simulation LES of theatmospheric boundary layer ABL creates a
systematic peak in zU /z / u /z in thesurface layer. This overshoot
is particularly evident when the first grid level is within the
inertialsurface layer and in hybrid LES/Reynolds-averaged
NavierStokes methods such as detached-eddysimulation, where the
overshoot is identified as a logarithmic layer mismatch.
Negativeconsequences of the overshootspurious streamwise coherence,
large-eddy structure, and verticaltransportare enhanced by
buoyancy. Several studies have shown that adjustments to the
modelingof the subfilter scale SFS stress tensor can alter the
degree of the overshoot. A comparison amongsimulations indicates a
lack of grid independence in the prediction of mean velocity that
originatesin surface layer deviations from LOTW. Here we analyze
the broader framework of LES predictionof LOTW scalingincluding,
but extending beyond, the overshoot. Our theory includes acriterion
that is necessary to remove the overshoot but is insufficient for
LES to produce constantz1 / through the surface layer, and fully
satisfy the LOTW. For mean shear to scale on u /zin the surface
layer, we show that two additional criteria must be satisfied.
These criteria can beframed in terms of three nondimensional
variables that define a parameter space in which
systematicadjustments can be made to the simulation to achieve LOTW
scaling. This occurs when the threeparameters exceed critical
values that we estimate from basic scaling arguments. The
essentialdifficulty can be traced to a spurious numerical LES
viscous length scale that interferes with thedimensional analysis
underlying LOTW. When this spurious scale is suppressed
sufficiently toretrieve LOTW scaling, the LES has been moved into
the supercritical high accuracy zone HAZof our parameter space.
Using eddy viscosity closures for SFS stress, we show that to move
thesimulation into the HAZ, the model constant must be adjusted
together with grid aspect ratio incoordinated fashion while
guaranteeing that the surface layer is sufficiently well resolved
in thevertical by the grid. We argue that, in principle, both the
critical values that define the HAZ and thesurface layer constant
when LOTW scaling is achieved can depend on details of the SFS
andsurface stress models applied in the LES. We carried out over
110 simulations of the neutralrough-surface ABL to cover a wide
portion of the parameter space using a low dissipation
spectralcode, the Smagorinsky SFS stress model and a standard model
for fluctuating surface stress. Theovershoot was found to
systematically reduce and z was found to systematically approach
aconstant value in the surface layer as the three parameters
exceeded critical values and the LESmoved into the HAZ, consistent
with the theory. However, whereas constant z was achieved
overnearly the entire surface layer as the LES is moved into the
HAZ, the model for surface shear stresscontinues to disrupt LOTW
scaling at the first couple grid levels, and the predicted von
Krmnconstant is lower than traditional values. In a comprehensive
discussion, we summarize theprimary results of subsequent studies
where we minimize the spurious influence of the surface stressmodel
and show that the surface stress model and the SFS stress model
constant influence thepredicted value of the von Krmn constant for
LES in the HAZ. 2010 American Institute ofPhysics.
doi:10.1063/1.3319073
aThis paper is based on an invited lecture, which was presented
by the firstauthor at the 61st Annual Meeting of the Division of
Fluid Dynamics of theAmerican Physical Society, held 2325 November
2008 in San Antonio,TX.
bAuthor to whom correspondence should be addressed. Electronic
mail:[email protected]. Telephone: 1 814 865-3159.
PHYSICS OF FLUIDS 22, 021303 2010
1070-6631/2010/222/021303/21/$30.00 2010 American Institute of
Physics22, 021303-1
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
I. INTRODUCTION
Accurate prediction of mean velocity and mean velocitygradient
are prerequisites to large-eddy simulation LESpredictions of
wall-bounded shear flows at the highest levelsof accuracy within
the constraints of LES. Mean velocitygradient, in particular,
enters the Reynolds stress as a sourcein streamwise velocity
variance and affects directly the large-eddy structure and
corresponding turbulent transport. We askwhat basic characteristics
of a subfilter scale SFS stressmodel together with the grid and the
numerical algorithm arerequired for a LES to capture the
law-of-the-wall LOTW inthe inertia-dominated surface layer with the
least alterationto the true NavierStokes physics. Alterations could
include,for example, the addition of numerical dissipation or
algo-rithmic modifications made in the computational domain orat
its boundaries to force a logarithmic mean velocity profileto
exist.
At its root, LOTW follows from scaling arguments withthe
assumption that at sufficiently high outer Reynolds num-bers, only
one characteristic length and velocity scale arerelevant to the
vertical gradient of mean velocity, U /z,within a surface layer
adjacent to a flat solid boundary thatis directly influenced by
surface blockage U is the meanhorizontal velocity magnitude and z
is the vertical coordinatefrom the surface. If the surface is
aerodynamically smooth,LOTW assumes the existence of a viscous
surface layer di-rectly adjacent to the surface that is
characterized by thesingle length scale = /u, where u
2 is the mean surfaceshear stress and is the fluid kinematic
viscosity. If the sur-face is homogeneously rough, the
characteristic roughnessscale z0 must enter the scaling immediately
adjacent to thesurface. Under LOTW, an inertial surface layer is
assumed toexist outside the viscous surface layer that is
sufficiently farfrom the surface that neither nor z0 are relevant
scales andthat the only length scale relevant to U /z is the
distancefrom the surface z, characterizing a dominant integral
scaleof underlying turbulence fluctuations. LOTW assumes thatu is
the only characteristic velocity scale across the entiresurface
layer, so that the transition between and z as domi-nant length
scales is the primary distinction between the vis-cous and inertial
surface layers. Consequently, according toLOTW U /zu / in the
viscous surface layer andU /zu /z in the inertial surface layer. If
any other lengthor velocity scales significantly affect the mean
velocity field,these scales will disrupt the LOTW scalings for U
/z.
We consider a boundary layer where the Reynolds num-ber is so
high that the viscous layer is unresolvable in thevertical, or that
roughness elements have a scale well belowthe vertical dimension of
the first grid cell adjacent to thesurface, that is z and/or z0z,
where z is the verticalgrid size assuming a uniform grid. Thus,
neither nor z0enter the boundary layer dynamics and scalings that
are re-solved on the grid and the viscous force term in the
resolvedNavierStokes equation is negligible; viscous dissipation
oc-curs at scales far below the grid and viscous effects enteronly
indirectly through the inertial transfer of momentumand energy
between resolved and SFS motions.
In 1992, Mason and Thomson1 pointed out a fundamen-
tal flaw in LES predictions of high Reynolds number turbu-lent
boundary layers: the mean velocity gradient scaled ac-cording to
inertial LOTW scaling produces a well-definedpeak within the
surface layer; the LES does not predict theLOTW. This overshoot has
since been pointed out andstudied by many researchers. In Fig. 1 we
show several ex-amples of the overshoot from the literature, where
the verti-cal gradient of mean streamwise velocity is plotted
normal-ized by inertial LOTW surface-layer velocity and
lengthscales
z z
u
Uz
. 1
In Fig. 1 mzz is plotted against z, where is thevon Krmn
constant, assumed to be 0.4. LOTW scalingimplies that z should be
constant through the inertial sur-face layer, the lower 15%20% of
the boundary layer depth.Estimation of the value that makes m=1
through thesurface layer in the high Reynolds number limit is
difficultfrom laboratory experiment, in part because the high
Rey-nolds number limit is difficult to know, u is difficult
tomeasure accurately, and pressure and other corrections
aresometimes applied to the data. In the atmospheric boundarylayer
ABL where Reynolds number is not a major concern,global stability
and lack of stationarity are. Recent compila-tions of experimental
data by Nagib and Chauhan6 concludethat the von Krmn coefficient is
not universal and exhibitsdependence on not only the pressure
gradient but also on theflow geometry They estimate over the range
from0.37 in channel flow to 0.41 in pipe flow, with a flatplate
boundary layer estimate in between at 0.384. In thenear-neutral
rough ABL Andreas et al.7 recently estimated0.387; however, they
quote experimental values from theliterature as low as 0.33 Ref. 8
and as high as 0.40 Ref. 9with several studies reporting in the
range of0.350.37.1013
In Fig. 1 m is plotted against z nondimensionalized bya boundary
layer depth or, in Fig. 1b, by a Coriolis scale.The overshoot shows
up clearly in many of these plots as apeak in m in the surface
layer, highlighted in gray. Figure 1indicates that the overshoot is
the most obvious manifesta-tion of a broader problemthe apparent
inability for LES topredict LOTW scaling within the high Reynolds
number tur-bulent surface layer. Similarly, a near-surface
overshoot hasalso been observed in the mean gradient of
temperature.2,14
Methods to reduce or eliminate the degree of overshoothave
universally centered on modifying the closure for theSFS stress
tensor e.g., Fig. 1; however, these have beendeveloped in the
absence of a clear understanding of itssou-rce. In this study we
develop a theory to explain the funda-mental characteristics
underlying both the overshoot and theinability for LES to capture
scaling for mean velocity gradi-ent consistent with LOTW in the
inertial surface layer thatis, constant z through the lower 15%20%
of the bound-ary layer. From this theory we develop requirements
for theLES to predict LOTW scaling that integrate the design
ofbasic features of the SFS stress model with the design of
thesimulation, particularly the grid. We further show that it
is
021303-2 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
possible to eliminate the overshoot without the LES predict-ing
LOTW scaling; eliminating the overshoot is a necessarybut not a
sufficient condition to predict LOTW. From thetheory we design a
three-variable parameter space in whichthe SFS model parameters and
LES grid can be adjusted tosystematically weaken the influence of a
spurious numericalLES viscous length scale until the LES predicts
LOTWscaling in the surface layer. Although the basic theory
isindependent of any particular SFS stress closure, we useeddy
viscosity models to gain insight into the theory and todevelop a
practical approach to designing LES within theparameter space.
We then present numerical experiments to show that thetheory
accounts for primary characteristics underlyingLOTW scaling with
LES. However we also learn that whenLOTW scaling is achieved, two
previously hidden issues ap-pear: the surface shear stress model
interferes with LOTWscaling at the first couple grid levels, and
both the surfacestress model and an interaction between SFS
stressmodel and aspect ratio influence the predicted value of the1
/ in the surface layer when constant z is achieved.
We discuss these two issues broadly within the Discussion,Sec.
VII.
The framework we present here has broader implicationsto the
transition between LES and Reynolds-averagedNavierStokes RANS
calculations,15 and to the interplayamong modeling, grid, and
algorithm. In particular, ouranalysis is relevant to hybrid
LES-RANS approaches such asdetached-eddy simulation16 DES, where
the overshoot isidentified as a log-layer mismatch or
superbufferlayer.1719 We discuss the applicability of the current
studyin Secs. II B and VII D.
II. BACKGROUND ON THE OVERSHOOT PROBLEM
Before developing our analysis into essential mecha-nisms
underlying LES prediction of LOTW scaling of meanvelocity gradient,
we set the stage with a discussion of theovershoot and its history.
Previous studies, many of whichhave produced significant reductions
in the degree of over-shoot, provided important clues that lead to
the theory devel-oped here, and present results that a theory
should explain.
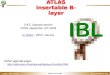
FIG. 1. Examples of the overshoot in mean shear from previous
LES studies: a Sullivan et al. Ref. 2, b Kosovic Ref. 3, c
Port-Agel et al. Ref. 4,and d Chow et al. Ref. 5. In a zi is the
ABL depth defined in the traditional manner as the height where
vertical turbulent heat flux is a minimum. In bz is scaled on u / f
, where f is the Coriolis parameter the angular velocity at the
earths surface. The simulations in c and d are pseudo-ABL/channel
flowsimulations which do not contain a capping inversion and
instead apply fixed horizontal velocity at z=H. =0.4 was assumed in
forming m. The shadedregions indicate the surface layer.
021303-3 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
A. Consequences of an overshoot in mean shear rate
Figure 1 shows the essential aspects of the overshootfrom
several previous LESs of the neutral boundary layerthat have
focused on this issue since Mason and Thomson.1Because the
overshoot is associated with the shear-dominated region of the
boundary layer, it is particularlyapparent in the fully
shear-driven neutral boundary layerFig. 1. Piomelli and Balaras19
point out that in DES of theshear-driven boundary layer,
unphysical, nearly one-dimensional wall streaks were present in the
RANSregionand shorter-scale outer-layer eddies were progres-sively
formed as one moved away from the wall. Similarobservations have
been made in the neutral ABL.20
In the moderately convective ABL an overshoot is pro-duced in
the shear-dominated surface layer while the mixedlayer is buoyancy
dominated.21 In the presence of convec-tion, vertically driven
thermals couple the surface and outerboundary layers. Khanna and
Brasseur20 showed that theelongated structure of streamwise
turbulence fluctuationsgenerated near the surface by the
interaction between strongmean shear and turbulence streaks is the
source of thermalsthat penetrate the outer boundary layer. These
coherent elon-gated vertical motions interact with the horizontal
meanwind to form highly coherent secondary rolls that extend tothe
top of the boundary layer and can extend 2040 bound-ary layer
thicknesses in the mean wind direction.22 Thus,there is a direct
coupling between the near-surface shear-driven streaks and very
large eddy structure of the boundarylayer. It is possible that the
mechanisms that underlie thecreation of the longitudinal convective
rolls may be relatedto the mechanisms underlying much weaker highly
elongatedstructures that have been observed in the log layer of
theneutral boundary layer.23
An important negative consequence of the inner-outercoupling is
that the near-surface errors from the overshootare driven
vertically to infect the entire boundary layer. Todemonstrate this,
Khanna and Brasseur20 applied two SFSmodels to the same LES; one
produced a stronger overshootthan the other. The LES with the
stronger overshoot pro-duced much stronger and coherent convective
thermals andboundary layer rolls with much larger horizontal
integralscales that persisted to the top of the boundary layer.
Further-more, these overly coherent thermals are spuriously
alignedwith the mean geostrophic wind. This spuriously strong
ther-mal structure adversely influences vertical transport to
theupper atmosphere of momentum, thermal energy,contaminants, and
humidity. Error in humidity predictionswill likely enter cloud
cover predictions and produce error insolar radiative heating at
the earths surface. Incorrect pre-diction of vertical transport of
CO2 and other greenhousegases may affect related predictions of
upper atmospherechemistry.
The negative consequences of the overshoot in mean ve-locity
gradient arise essentially from the incorrect predictionof Reynolds
stress anisotropy near the surface. Juneja andBrasseur24 argued
that the incorrect anisotropy results from afeedback interaction
between the exaggerated mean gradientand Reynolds stress production
as a consequence of inherent
under-resolution at the first grid level that occurs in LES
ofhigh Reynolds number turbulent boundary layers when thefirst grid
level is in the inertial layer. The errors are exacer-bated by any
mechanism that enhances vertical transport,including buoyancy20 and
boundary layer separation.
B. Previous studies
Given the importance of the overshoot, there have been anumber
of studies that have attempted either to understandthe cause of the
overshoot,24 or have attempted to remove it.Mason and Thomson,1 for
example, suggested that the over-shoot is particular to eddy
viscosity closures where energy isremoved at each point from the
resolved scales in contrastwith the known forward/backward nature
of energy transferat a point. To introduce backscatter into the
simulation,they added to the resolved momentum equation a
Langevin-like stochastic acceleration term, in addition to a SFS
stressdivergence using the Smagorinsky closure for SFS
stress.However, Mason and Thomson1 made another
significantmodificationthey reduced the eddy viscosity near the
sur-face by making the Smagorinsky length scale proportional toz at
grid nodes near the surface.
In Fig. 1 we compare the results from four other groupsof
researchers between 1994 and 2005 who explicitly ad-dressed the
problem of the overshoot in LES of the ABL.The surface layer is
shaded to indicate the region over whichm should be predicted as a
straight vertical line and fromwhich a grid-independent prediction
for mean velocityshould emanate. Figure 1a shows predictions from
Sullivanet al.2 who argued that as the surface is approached, the
SFSstress closure should transition from an eddy viscosity
modelappropriate to LES to a model more appropriate to theRANS
equation. Although their mixed eddy viscosity modelwas purely
dissipative no backscatter, the overshoot wassignificantly reduced
compared with a pure SFS model. LikeMason and Thomson,1 their mixed
model results in a reduc-tion in net SFS stress and eddy viscosity
near the surface.Whereas the overshoot could be reduced, and
perhaps eveneliminated, by the adjustments to the SFS model, a
depen-dence of z on z persisted Fig. 1a. The Sullivan et al.2model
was further modified by Ding et al.25 Recently,Lvque et al.26
modified the Smagorinsky eddy viscosity bysubtracting mean shear
from the instantaneous resolved rate-of-strain tensor. Whereas they
applied the model only to lowReynolds number boundary layers with
partially resolvedviscous layers, the effect is again to reduce the
eddy viscos-ity near the surface. However the LES predictions
failed topredict constant z over the entire surface layer.
Kosovic3 added additional nonlinear terms in velocitygradient to
the eddy viscosity closure. Whereas a major im-provement in the
overshoot in the neutral ABL was obtainedFig. 1b, grid resolution
was quite low and the improve-ment degraded at higher grid
resolution. Dynamic formula-tions of the Smagorinsky eddy viscosity
closure have beenapplied by Port-Agel et al.4 and Esau27 to improve
the over-shoot and capture the LOTW. We show in Fig. 1c the
re-sults from Port-Agel et al.4 who developed a scale-dependent
formulation of the dynamic Smagorinsky model
021303-4 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
that produces a reduction in eddy viscosity near the surfaceand
removes an apparent undershoot with the standard dy-namic model
solid line. Whereas the modifications signifi-cantly reduced the
overshoot, constant z was not obtainedover the surface layer.
Chow et al.5 combined a number of modeling elements,including a
dynamic eddy viscosity model,28 a resolvableSFS stress model
component29 combined with a deconvolu-tion procedure,30 and a
canopy model.31 As shown in Fig.1d, whereas overprediction of mean
shear near the surfacecould be reduced with certain combinations of
elements, itwas not clear which modeling elements were
responsible,and a robust grid-independent solution was not
obtained. Arecent calculation by Drobinski et al.,32 however,
indicatedthat a suppression of the overshoot was possible using a
stan-dard one-equation model but with a more refined grid.
Theirresult will be discussed in Secs. VI B and VII B in
contextwith the current analysis.
Figure 2 shows that what we refer to here as an over-shoot is
described as a logarithmic layer mismatch or su-perbuffer layer in
the DESs of Nikitin et al.17 Spalart18 andPiomelli and Balaras19
described this as a fundamental unre-solved problem in DES. Whereas
the simulations of Fig. 1contain only the inertial LOTW layer due
to the presence ofsurface roughness and the fluctuating surface
stress is mod-eled, the DES uses RANS to model a viscous surface
layerwith no slip at the wall shown in Fig. 2a below
aninertial-dominated surface layer that is simulated with LES,as
shown in Fig. 2b. The logarithmic layer mismatch,
shown by the circled part of the mean velocity profile, Fig.2a,
is shown in Fig. 2b to be equivalent to the overshootphenomenon
discussed above.
Figures 1 and 2 motivate the current research; we seekan
understanding of the essential mechanisms underlying theovershoot
and, from that, a method that will both eliminatethe overshoot and
predict a vertical line in m versus z overthe entire surface layer
with a grid-independent predictionover the entire boundary layer.
Historically, the assumptionhas been that the solution to the
overshoot problem is a clo-sure issue, and all attempts to modify
LES to predict LOTWhave been through adjustments to the SFS stress
tensormodel. Although there have been significant advances made,the
fundamental mechanisms underlying the overshoot arenot understood
so that a clear path to robust grid-independentLES that eliminates
the overshoot and predicts LOTW scal-ing has been elusive. We show
here that the fundamentalissues underlying the overshoot and its
resolution are broaderthan the SFS model and involve the basic
characteristics ofthe SFS stress closure integrated with the
construction of theLES grid.
C. Useful clues
In the studies described above, a number of
importantobservations have been made that provide clues to
underly-ing issues and which require explanation:
1 The overshoot is influenced by the details of the SFSmodel.
This has been discussed above in Sec. II B Fig.
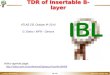
FIG. 2. The logarithmic layer mismatch in the smooth wall
turbulent channel flow DESs of Nikitin et al. Ref. 17 discussed by
Spalart Ref. 18. Curve A4is the simulation in b; Re=20 000. a U+=U
/u plotted against z+=z /. b The log layer mismatch shown by the
upper oval in a is shown here tobe an overshoot in normalized mean
shear m, negating LOTW scaling over the surface layer shaded area.
b was kindly generated by Spalart Ref. 33. is assumed to be
0.4.
021303-5 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
1. Whereas there have been many variants to the mod-eling
process, all have employed an eddy viscosity com-ponent. A common
characteristic of the more successfuladjustments to the modeling
process is a reduction ineddy viscosity near the surface, as
compared with un-adulterated models.
2 The overshoot is tied to the grid. Khanna and
Brasseur21pointed out that increasing the resolution of the
grid,keeping all other elements of the simulation unchanged,does
not diminish the magnitude of the overshoot, butmoves the peak in m
closer to the surface in proportionto the vertical grid spacing, z.
Similarly, Spalart18pointed out that in DES grid refinement merely
movesthe same amount of logarithmic layer mismatch closerto the
wall. This dependence of the overshoot on gridresolution is clear,
for example, in Fig. 1d. Why thelocation of the overshoot should be
proportional to z,however, is not understood. Khanna and
Brasseur21pointed out that because the horizontal integral scale
ofvertical velocity scales on z, vertical velocity is
alwaysunder-resolved at the first grid level independent of
gridresolution and that this under-resolution has
negativeconsequences that must be addressed to eliminate
theovershoot. Specifically, they proposed that this
inherentunder-resolution at the first grid level somehow ties
theovershoot to the grid. The mechanisms were unclear, butwere felt
to be somehow associated with the lack ofperformance of SFS models
when the integral scales areunder-resolved. This shall be discussed
in Sec. IV B
3 The prediction of mean velocity gradient is grid depen-dent. A
requirement for any successful numerical simu-lation is grid
independence in the solution for meanvariables.34 As illustrated in
Fig. 1d, the solution formean velocity gradient often does not
converge as thegrid is refined; each grid produces a different
solutionnot only in the overshoot region but throughout theboundary
layer. Grid dependence in the flow is apparentwhen different
solutions in the literature are comparede.g., Andren et al.14. We
shall show in Sec. VI B that agrid-independent solution is only
possible when both theovershoot is suppressed and LOTW scaling is
obtained.
It is apparent from these previous studies that althoughthe
overshoot is influenced by the closure for SFS stress, theovershoot
problem is only part of the broader issue of accu-rately predicting
the LOTW, and that these are both model-ing and numerical
issues.
III. AN ANALYSIS OF THE FUNDAMENTAL NATUREOF THE OVERSHOOT: THE
FIRST OBSERVATION
In this section we focus specifically on the overshoot.A primary
mechanism underlying the overshoot and itsresolution can be
understood by comparing true inertial-versus-viscous scaling
underlying the stationary fully devel-oped smooth wall channel flow
in the high Reynolds numberlimit with scaling of LES of the same
high Reynolds numberchannel flow with an unresolved viscous or
roughness layer.We shall find that we can relate the true physics
of the chan-
nel flow to the spurious physics of the simulated channelflow
that is model and algorithmically dependent and cannotbe entirely
eliminated.
A. Scaling high Reynolds number smooth wallturbulent channel
flow
Consider a fully developed stationary smooth wall
in-compressible channel flow at Reynolds numbers sufficientlyhigh
to support the classical LOTW in the surface layer.The local and
global mean axial momentum balances are,respectively,
Px
=
Ttzz
+Tzz
=
Ttotzz
andPx
=
T0
, 2
where T0Ttot0u2 and is the half channel width or
boundary layer depth the height where Ttot=0. The
secondexpression in Eq. 2 results from a global force balance.
Thecoordinates x ,y ,z are in the mean-flow, spanwise,
andwall-normal directions, respectively. Px is the mean pres-sure
and Ttot=Tt+T is the total mean stress, where Tt and Tare Reynolds
stress and mean viscous stress, respectively,
Ttz = uw, Tz = Uz
. 3
Capital letters and primed quantities indicate mean flow
andfluctuating variables, respectively, u ,v ,w are the
velocitycomponents in the x ,y ,z directions, , are density
andviscosity, and the angle brackets denote ensemble averaging.
Integrating Eq. 2 in z and replacing Tz withu /zmz, the exact
equation for the normalized meangradient is
mz = z+1 Tt+z z , 4where Tt
+=Tt /T0 is the ratio of the Reynolds stress Ttz to
the wall stress T0, and z+=z / is the surface-normal coordi-nate
nondimensionalized by the viscous surface layer scale= /u, where =
/. Equation 4 states that the totalstress Ttotz, split between the
viscous and inertial contribu-tions on the left-hand side LHS and
right-hand side RHSof Eq. 4, decreases linearly from T0 at the
surface to zero atthe channel center plane. Near the surface z /1
in thefriction-dominated layer z+5, the turbulent stress is
neg-ligible Tt
+1 and Eq. 4 is well approximated by
mz z+ z+ 5 . 5
This result suggests that mz exceeds 1 when z+1 /2.5 for 0.4,
which is well within the friction-dominated portion of the surface
layer.
Equation 5 indicates that an overshoot in mz existsin the
smooth-surface high Reynolds number channel flow ina region bounded
from below by z+2.5 and from above bythe lower margin of the
inertial LOTW layer and upper mar-gin of the buffer layer. In Fig.
3 we show that this is indeedthe case. We replot, in this figure,
the data from direct nu-merical simulations DNSs of the smooth wall
channel atdifferent Reynolds numbers that has been graciously
madeavailable to the scientific community by Iwamoto et
al.35,36
021303-6 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
at Re=300, 395, and 642, and at Re=2003 by Hoyas andJimenez,37
where Re=u /. Figure 3a shows that mz+exceeds 1 when z+ exceeds 2.5
and peaks at z+10 with amaximum value of about 2.3 independent of
Reynolds num-ber. m approaches 1 at z+4050. Comparing Fig. 3cwith
Fig. 3d, it is significant that the peak in mz occursnearly
coincident with the crossover between turbulent stressTtz and
viscous stress Tz. Both the location of overshootand the location
of the crossover occur at 10. Since theposition of this overshoot
scales on the viscous scale andcorresponds to the transition
between the dominance of tur-bulent stress above and viscous stress
below, this overshootreflects the application of an inertial length
scale z in theportion of the surface layer where the appropriate
lengthscale is the viscous surface scale . Figures 3c and 3dshow
that the overshoot and the crossover in Tz and Ttzmove physically
closer to the surface with increasingReynolds number without a
reduction in maximum m.
B. LES of high Reynolds number turbulent channelflow
We compare the previous analysis with LES of the samehigh
Reynolds number channel flow analyzed in Sec. III A,but in which
either a viscous layer exists that is fully unre-
solved z or the surface is rough with fully unresolvedroughness
scale z0z. The momentum equation for theresolved velocity ui
r is
uir
t+ui
rujr
xj=
1
pr
xi
ijSFS
xj, 6
where the viscous force has been scaled out of the momen-tum
balance on account of the high local Reynolds numberson all grid
nodes within the computational domain surfaceviscous layers are
unresolved or nonexistent. The SFS stresstensor ij
SFS is modeled. We apply a superscript r to indicate avariable
that is carried forward in the simulation as a re-solved
variablethat is, after the process of explicit and im-plicit
filtering in the algorithmic advancement of the mod-eled
discretized version of Eq. 6. Explicit filtering isgenerally
carried out algorithmically as a dealiasing step al-gorithmically,
urur in Eq. 6 should be written as ururr toindicate the common
application of a second explicit filter ron the nonlinear term,
typically in pseudospectral LES. Im-plicit filtering arises from
the dissipative nature of the modelfor ij
SFS, from numerical dissipation within the discretized
version of Eq. 6, and from any dissipative elements intro-duced
algorithmically as the discretized dynamical system isadvanced in
time.
The ensemble mean of Eq. 6 for stationary fully devel-oped high
Reynolds number channel flow is
Px
=
TRzz
+TSzz
=
Ttotzz
withPx
=
u2
.
7
The second equation is the global force balance. Total
stressTtot=TR+TS is now the summation of a turbulent stress
TRformed from the fluctuating resolved velocity componentsand the
shear component of the mean SFS stress tensor TS,
TRz = urwr, TSz = 13SFS . 8
Whereas the divergence of the SFS stress is physically
aninertial contribution to the force balance, in application allSFS
models are structured so as to contain a frictional con-tribution
to the equation of motion. This is explicitly true ofeddy viscosity
models and mixed models which include aneddy viscosity term.
In what follows, we do not restrict our theoretical treat-ment
to any particular SFS stress model. We do, however,use eddy
viscosity closures for guidance and to carry outnumerical
experiments.
We seek a mechanism to extract the frictional compo-nent of the
complete modeled tensor ij
SFS; that is, we seek anestimate of a scalar viscosity that
extracts the part of ij
SFS thatis parallel to the resolved strain-rate tensor sij
r in the mean.For the purposes of determining the underlying
causes of theovershoot in the highly shear-dominated part of the
boundarylayer, we define a LES viscosity lesz as the
proportion-ality between 13
SFS and 2s13r =U /z,
0.0
20.0
40.0
60.0
0 0.5 1 1.5 2 2.5
z+
m
(a) Re=300Re=395Re=642.5Re=2003
0.0
20.0
40.0
60.0
0 0.2 0.4 0.6 0.8 1T+, T
+t, T
++T
+t
(b)
0.0
0.1
0.2
0.3
0.4
0 0.5 1 1.5 2 2.5
z/
m
(c)
0.0
0.1
0.2
0.3
0.4
0 0.2 0.4 0.6 0.8 1T+, T
+t, T
++T
+t
(d)
FIG. 3. DNS of the smooth wall channel flow showing the
physically realovershoot in the viscous region. a Normalized mean
shear m vs z+. bWall-normalized Reynolds shear stress Tt
+ filled symbols and mean viscousshear stress T
+ open symbols vs z+. The dotted, dashed, and thin straightlines
are the total shear stress profiles for Reynolds number of 300,
395, and642, respectively. c m vs z /, where is the half-channel
height. d Tt+filled symbols and T
+ open symbols vs z /. Total shear stress profiles forthree
different Reynolds number collapse onto a single linear line. =0.4
isassumed in forming m. Re=300, 395, and 642 DNS data are from
Iwa-moto et al. Ref. 35 and Iwamoto Ref. 36. In c we have added
theRe=2003 DNS data from Hoyas and Jimenez Ref. 37. The
horizontaldotted lines in c and d indicated the upper margin of the
surface layerwhere LOTW should be predicted.
021303-7 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
lesz TSz
2s13r
closure independent , 9
where sijr is the resolved strain-rate tensor. Furthermore,
since
we are focused on the first few grid points adjacent to
thesurface, we parametrize LES viscosity with its value at thefirst
grid level, LESz1, and we define the normalized LESviscosity as
follows:
LES lesz1, LES+ z
leszLES
. 10
We emphasize that the definitions in Eqs. 9 and 10 do notassume
an eddy viscosity model and can be made for anyclosure of the SFS
stress tensor. However, this estimate offrictional content is only
valid with strong mean shear at thefirst grid level, and is
therefore appropriate to the neutralboundary layer, and the stable
and moderately convectiveABLs with shear-dominated turbulence at
z1.
Replacing TS in Eq. 7 with LESLES+ zU /z, inte-
grating in z, and using inertial LOTW scaling Eq. 1, pro-duces
the expression for mz,
mz =zLES
+
les+ z
1 TR+z z , 11where
zLES+
z
LES, LES
LESu
and TR+
TRT0
. 12
As in the exact channel flow equations, T0=Ttot0u2, so
that TR+z is the ratio of the resolved part of the Reynolds
shear stress to the total wall shear stress. Unlike the
viscouslayer, where we could argue that the Reynolds stress is
asmall percentage of wall stress and approximate Eq. 4 byEq. 2, we
cannot a priori argue that TRT0. However, atthe first few grid
points, z /1 and LES
+ zO1, so thatEq. 11 can be approximated by
mz zLES+ 1 TR
+ first few grid points . 13
The magnitude of TR+ depends on the relative content of re-
solved to SFS stress in total stress Ttot=TR+TS. When
theseparation between resolved and SFSs is in the inertial
range,implying that all integral scales are well resolved, then
TSTR, and TR
+ cannot be neglected in Eq. 13. However, asdiscussed in Sec. II
C, some integral scales are inherentlyunder-resolved at the first
few grid levels in high Reynoldsnumber LES of wall-bounded flows.
Thus, it may be the casethat TR
+1 close to the surface so that Eq. 13 is approxi-mated by
mzzLES
+. If this were the case, then we would
reach the same conclusion as when Eq. 4 was reduced toEq. 5 in
the viscous sublayer of the smooth wall channelflow: an overshoot
would occur when zLES
+ 1 /2.5, thatis when z2.5LES.
Figure 4 shows that indeed, TSTR near the surface in atypical
LES of the neutral ABL we describe the details ofour LESs of the
ABL in Appendix B using the Smagorinskymodel, so that mzzLES
+ and an overshoot is produced atzLES
+ 2.5. In fact, Figs. 4a and 4b are very similar to thecurves in
Figs. 3a and 3b of the real overshoot in the
smooth wall channel flow. The spurious overshoot
initiatesbetween the first and second grid levels and peaks
nearlycoincident with the crossover between TR and TS, very
simi-lar to Fig. 3, where the real overshoot is found to be
coinci-dent with the crossover between Tt and T.
The overshoot in LES appears to arise from physicssimilar to the
true overshoot in smooth wall channel flow.However, in LES the
frictional layer that causes the over-shoot is a numerical LES
frictional layer near the surface thatarises from the frictional
nature of the modeled SFS stressand any numerical and algorithmic
additions to dissipation.This conclusion is analyzed further in the
following sections.
C. The first criterion
The observation from Fig. 4 that the overshoot is asso-ciated
with a reduction in the resolved Reynolds stress tobelow the mean
SFS stress suggests that the spurious fric-tional content of the
model for SFS stress has introduced aspurious length scale LES that
interferes with the inertialscale z that should dominate the
surface layer. The spuriousinterference of LES with inertial
scaling and the consequentspurious overshoot are essentially the
same physics that un-derlie the production of the real overshoot in
the friction-dominated part of the LOTW layer of the smooth wall
chan-nel flow. However, unlike the true viscous layer, which is
anecessary consequence of frictional force with no slip,
thespurious LES frictional layer must be controlled to eliminatethe
frictionally induced spuriously large mean gradients nearthe
surface. If it were possible to maintain the dominance ofTR over TS
to the surface, then the spurious frictional contri-bution from the
SFS stress model would remain suppressed.This observation suggests
a criterion for elimination of theovershoot that
RTR1TS1
R O1 closure independent , 14
where the subscripts 1 mean at the first grid level. Thecritical
value R, to be determined experimentally, is an or-der 1 quantity
but may depend on the model for SFS stress,the lower boundary
condition, the stability of the ABL, thenumerical algorithm,
etc.
0.0
20.0
40.0
60.0
0 0.5 1 1.5 2 2.5
z+LES
m
(a) m
0.0
20.0
40.0
60.0
0 0.2 0.4 0.6 0.8 1T+S, T
+R, T
+R+T
+S
(b) T+RT+S
T+R+T+S
FIG. 4. Overshoot in LES of the neutral ABL using the
Smagorinsky modelCs=0.2 and a 128128128 grid. a m vs zLES+ . b Wall
normalizedmean resolved and SFS shear stress TR
+ and TS+ plotted against zLES+ and its
sum. =0.4 is assumed in forming m. =0.4 is assumed in forming
m.
021303-8 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
D. Understanding the ratio R and the first criterionOn what does
R depend and how can it be controlled in
a LES? To gain insight into the nature of R and find ananswer to
this question, we develop expressions for R basedon eddy viscosity
representations for the deviatoric part ofthe SFS stress, ij
SFSdevijSFS
kkSFS /3ij,
ijSFSdev = 2tsij
r, t = tut, 15
where t and ut2 characterize length and energy at the small-
est resolved scales. t is often taken as a fixed length
scalet=Ct, where = xyz1/3 is the grid size x ,y ,z arethe grid
spacings in x ,y ,z and Ct is a model constant. Somemodels embed
z-dependence into t in the form tz=Cttz, where tz is specified to
decrease toward the sur-face and approaches away from the surface.1
Dynamicmodels take t=Ct, but determine Ct dynamically with
theresult that Ct=Ctz reduces near the surface.4Thus, in each case
the modeled length scale tz decreasestoward the surface. In the
current work we develop scalingfrom eddy viscosity closures with
constant t=Ct, butshall discuss our results in context with
z-dependent t in theDiscussion, Sec.VII B.
The space-time variability in tx , t is modeledthrough a
fluctuating velocity scale utx , t, given for theSmagorinsky
closure by ut,Smagx , t=2sij
r sijr 1/2. In the ba-
sic one-equation model, ut,1-eqx , t=ex , t, where ex ,
trepresents the SFS kinetic energy, modeled through a prog-nostic
equation.32,38 In both models t=Ct. Here we de-velop expressions
using the Smagorinsky closure with Ctreplaced by Cs
2, as is traditional. However we shall present
results for both the Smagorinsky and one-equation eddy
vis-cosity models.
Independent of the model, 13SFSdev=13
SFS and
TS1 = 13SFS1 2LESs13
r 1 = 21t1s13r 1, 16
where
LES = 1t1 with 1 = 1 + ts13r 1t1s13r 1 . 17We have found from
LES of the neutral ABL that 1 is typi-cally 1.05. The ensemble mean
of the eddy viscosity at thefirst grid level with the Smagorinsky
closure is
t1 = Cs222sij
r sijr 1/21 2Cs
22s13r 1 = Cs
22 Uz
1,
18
where
sijr sij
r 1/21 2s13r 11 + 18 sijrsijr1s13r 12 is well approximated by
2s13r 1 since the strain-rate fluc-tuations are nearly all SFS this
is especially true at the firstgrid level where the integral scales
are minimally or poorlyresolved. We write the mean streamwise
velocity gradient ina form appropriate for inertial scaling in the
surface layer:
2s13r 1 = Uz 1 u1z1 . 19
In Eq. 19 1 is defined as the value required to make theLHS
equal to the RHS at the first grid level. Only if LOTWis predicted
by the LES, so that 1 is constant through thesurface layer, will 1
be the predicted value of the vonKrmn constant. When the Coriolis
force is present, as inLES of the ABL, the velocity at the first
grid level is at anangle 1 to the geostrophic wind velocity above
the boundarylayer. In this case, Eqs. 1921, 23, 24, 27, and
28contain an additional factor cos 1, as given in Appendix A.
Inserting Eq. 19 into Eqs. 18 and 17 leads to thefollowing
expression for the LES viscosity:
LES =1
1Dsuz, where
20Ds Cs
2AR4/3 Smagorinsky .
AR=x /z=y /z is the aspect ratio of the grid and z=z1 isthe
vertical grid spacing. As will be discussed at length, Eq.20
indicates that the LES viscosity is proportional to thecombination
Cs
2AR4/3
, and therefore is altered both by theconstant in the SFS model
and by the aspect ratio of the grid,as well as by the vertical grid
spacing.
Applying Kolmogorov scaling39 and LOTW scaling tothe
one-equation model produces a result similar to Eq. 20,but with Ds
replaced by Dk=CkAR
8/9, where Ck is the model
constant, and with 1 replaced by a different order one con-stant
. The main point is that with the eddy viscosity clo-sure, the LES
viscosity is proportional to the product ofmodel constant and grid
aspect ratio, each raised to a powerthat depends on the
closure.
In order to develop an expression for R, we note thatsince the
total shear stress is Ttot=TR+TS, R is given by
R =Ttot1TS1
1 =2u
2TS1
1 closure independent ,
21
where
2 Ttot1Ttot0
N 1
N
. 22
In Eqs. 21 and 22 Ttot0 =u2 and N= /z is the number
of grid points from the surface to the top of the boundarylayer.
2 is generally very close to 1.
Inserting Eq. 19 for s13r 1 and Eq. 20 for LES intoTS1
=2LESs13
r 1, and then inserting this result for TS1 intoEq. 21,
produces
R =1
Dt 1 eddy viscosity , 23
where 2 /1 is generally very close to 1. For theSmagorinsky
closure, = 1 and DtDs=Cs2AR4/3, whereasfor the one-equation model
DtDk=CkAR8/9 and is a dif-ferent order one constant.
021303-9 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
The eddy viscosity closure was used in the derivation ofEq. 23
to provide insight into the mechanisms underlyingR and how it can
be systematically adjusted in LES in orderto move the LES into the
supercritical regime RR. Welearn that the ratio of resolved to SFS
stress at the first gridlevel can be increased either by reducing
the model constantor by reducing the grid aspect ratio in the
combination
Dt = CtaAR
b, 24
The model constant Ct Eq. 15 and AR enter in this com-bination
through the LES viscosity, Eq. 20, and the powersa and b are model
dependent. Thus, LES viscosity can bedecreased and R increased by
reducing either or both Ct andAR to reduce Dt.
The explanation behind the effects of model constantand AR on R
is in the manner that each reduction affects thebalance between
resolved and SFS stress within the totalstress Ttotz that is fixed
by the global momentum balance.Reducing the model constant directly
reduces the averageSFS stress TS. Reducing the aspect ratio
corresponds to anincrease in resolution in the horizontal, which
moves verticalvelocity variance and Reynolds stress from SFSs to
resolvedscales in the horizontal. The consequence of both effects
is toreduce TS relative to TR, and therefore to increase the
ratioR=TR1 /TS1. Similarly, both effects reduce LES viscosity.
IV. THE BALANCE BETWEEN NUMERICAL FRICTIONAND INERTIA: A SECOND
OBSERVATION
The above discussion suggests that the mechanisms thatunderlie
the generation of a mean gradient overshoot and itsconsequences are
associated with numerical LES frictionthat, in the modeled
dynamical system, forces a physicalresponse similar to that
underlying the overshoot in Newton-ian turbulent channel flow Fig.
3 that results from molecu-lar friction. Like the real viscous
layer in smooth wall chan-nel flow that arises from a change in
scaling from z to = /u, the overshoot in LES reflects a transition
in domi-nance from the inertial surface scale z to a numerical
LESviscous length scale LES=LES /u that dominates near thesurface.
LES produces an overshoot in mz as a result ofthe spurious
dominance of the length scale LES in a regionwhere the integral
scales should scale on z.
However, for the LOTW to exist in an inertia-dominatedsurface
layer, inertial effects must be sufficiently strong rela-tive to
viscous forces, as measured by the ratio of the bound-ary layer
depth to the viscous wall scale, the Reynolds num-ber Re= /. This
suggests the existence of a LESReynolds number ReLES= /LES. Since
friction in thediscretized LES dynamical system is at the core of
theovershoot, we must consider all consequences of
friction,including the requirement that inertial effects dominate
vis-cous effects sufficiently to produce the LOTW scaling,U /zu
/z.
In particular, in the smooth wall channel flow the inertiallayer
will only reflect the LOTW when inertia dominates theviscous force
within the surface layer sufficiently that Reexceeds a critical
value Re
. The DNS data of Fig. 3 show
that the LOTW is not captured in the viscous channel floweven at
Re=2003, when the viscous layer defined by thepeak in m is only 2%
of the surface layer.
Similarly, one can expect that LES of the high Reynoldsnumber
boundary layer can only produce LOTW scalingwhen inertia in the
discretized dynamical system dominatesfriction sufficiently that
the LES Reynolds number ReLESexceeds some critical value, ReLES
. Indeed one can also pos-
tulate a transitional ReLES which must be exceeded to
supportturbulence in the discretized LES dynamical system. In Fig.5
we show four LESs of the ABL at increasing values ofReLES. Similar
to Fig. 3 for DNS of channel flow where thepeak in the overshoot
scales on the viscous scale , with theexception of the lowest ReLES
thin solid curve with smalldots, the overshoot in LES scales on the
numerical LESviscous scale, LES Fig. 5a. In fact, both the true
channelflow overshoot and the spurious LES overshoot peak at
tencorresponding viscous units. Thus, the LES overshoot movescloser
to the surface along with LES as ReLES= /LES in-creases Fig. 5c and
the numerical LES viscous layer oc-cupies a correspondingly smaller
percentage of the surfacelayer. Similarly, the peak in mz coincides
with the cross-over between mean resolved and SFS stress TR and TS
Fig.5d so that the crossover also scales on LES Fig. 5b.
The thin solid curve with small dots in Fig. 5c is
0.0
20.0
40.0
60.0
0 0.5 1 1.5 2 2.5
z+LES
m
(a) ReLES=110ReLES=166ReLES=276
0.0
20.0
40.0
60.0
0 0.2 0.4 0.6 0.8 1T+S, T
+R, T
+S+T
+R
(b)
0.0
0.1
0.2
0.3
0.4
0 0.5 1 1.5 2 2.5
z/
m
(c)
0.0
0.1
0.2
0.3
0.4
0 0.5 1T+S, T
+R, T
+S+T
+R
(d)
FIG. 5. Overshoots in LES of the neutral ABL. a m vs zLES+ . b
Normal-ized resolved Reynolds stress TR
+ filled symbols and mean SFS shear stressTS
+ open symbols vs zLES+ . Dotted, dashed, and thin lines are the
sum ofresolved and SFS stress from low to high LES Reynolds number.
c m vsz /, where is defined as the height where m=0. d TR
+ filled symbolsand TS
+ open symbols vs z /. The LES Reynolds numbers of the
simula-tions are shown in a. In order of ReLES, the Smagorinsky
constants andgrids were Cs=0.1, 424296, Cs=0.2, 192192128, and
Cs=0.1, 128128256. The thin black line in c is a simulation with
suchlow ReLES that turbulence is barely sustained Cs=0.2, 424232
andReLES=38. The horizontal dotted lines in c and d indicated the
uppermargin of the surface layer where LOTW should be predicted.
=0.4 isassumed in forming m.
021303-10 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
included to illustrate the consequence of a LES Reynoldsnumber
that is too low to support turbulence. The mean ve-locity profile
is qualitatively similar to the parabolic profilecharacteristic of
laminar Newtonian channel flow. Thus, al-though the LES equation
contains no true frictional term, thenumerical LES friction
inherent in the model and adjusted bythe grid as described by LES
in Eq. 20 can, like real fric-tion, dampen inertial motions and
prevent turbulence withinthe discretized dynamical system advanced
in the LES.
The frictional content of the simulation embodied byLES should,
in principle, be extended to include the numeri-cal dissipation
within the specific discretization that is ap-plied to advance the
LES equations in time with a SFSmodel. The LES presented in Sec. VI
applies the pseu-dospectral method in the horizontal and finite
difference inthe vertical on a staggered mesh and is minimally
dissipa-tive. Significant frictional content within the numerical
algo-rithm might strengthen the overshoot beyond what is de-scribed
here.
A. The second and third criteria
The first criterion discussed in Sec. III C is a
necessarycondition to eliminate the overshoot but is not a
sufficientcondition to correctly predict LOTW scaling in the high
Rey-nolds number surface layerthat is, constant z is the sur-face
layer. A second criterion is necessary: that ReLES exceeda critical
ReLES
to achieve LOTW scaling in the simulateddynamical system. In the
presence of the overshoot, onewould expect that to predict the LOTW
in the part of thesurface layer that is not directly affected by
numerical LESfriction, ReLES
would have to achieve values in thousandssimilar to Re
in real frictional channel flow. However, un-like the DNS of
channel flow, where the overshoot is real andcannot be eliminated,
in LES of high Reynolds numberboundary layers the overshoot and its
frictional sources arespurious. Therefore, the critical Reynolds
number ReLES
re-
quired to satisfy the second criterion turns out to be muchlower
when RR and the overshoot is eliminated thanwhen the overshoot is
maintained as in Fig. 5.
To show this we use Eq. 19 to write
TS1 = 2LESs13r 1 = LES
u
1z1closure independent .
25
Inserting Eq. 25 into Eq. 21 yields an expression forReLES that
is valid independent of the SFS model
ReLES =N
21
R + 1 closure independent . 26
Thus ReLES depends both on R and on the vertical grid
res-olution N. Note that in Fig. 5c the LES given by the solidcurve
has low ReLES because of low vertical grid resolution.The critical
LES Reynolds number ReLES
is therefore asso-ciated not only with the critical ratio of
resolved to SFSstress R, but also with a critical vertical
resolution N
,
where
ReLES
=
N
21R + 1 closure independent . 27
The third criterion, that N exceed a critical value N
, follows
from the second criterion, ReLESReLES when RR.
One way to understand the requirement for a minimumvertical
resolution to produce high accuracy LES of theboundary layer is
simply as a manifestation of the standardcomputational requirement
that all special regions with theirown characteristic dynamics be
well resolved for accuratenumerical simulation. The surface layer
is an example of aregion with special dynamics that requires good
resolution.The surface layer occupies 15%20% of the boundary
layerdepth at high Reynolds numbers. Resolving this layer with,say,
ten grid points in the vertical therefore leads to an esti-mate for
N
of 5065. Recognizing that R and ReLES aremodel dependent, we can
estimate ReLES
roughly for R1 to be ReLES
250325. This estimate assumes that theovershoot has been
eliminated and that the LOTW has beencaptured with 1=0.4. That is,
we assume that there areno additional confounding influences that
cause the LES todeviate from the LOTW. In Sec. VII we shall discuss
con-founding influences. This estimate for ReLES
is well over anorder of magnitude lower than what we would
estimate byanalogy with Re
in DNS of channel flow if the overshootwere retained, but
confined to a sufficiently thin, numericallyviscous layer adjacent
to the surface.
We shall find Sec. VI that for our current LES of theABL with
the Smagorinsky eddy viscosity closure, 4550 isa reasonable
estimate for N
and 350 is a reasonable estimatefor ReLES
. The good news is that a vertical grid resolution
Nz2N
90100 is not overly severe and doable on cur-
rent mainframes. The bad news is that most calculations inthe
literature are of LES with vertical resolutions below criti-cal.
Interestingly, we shall show in Sec. V B that in additionto
subcritical resolution in the vertical, there are
practicallimitations to the maximum vertical resolution in LES of
thehigh Reynolds number boundary layer.
B. Understanding the LES Reynolds numberand the three
criteria
To develop greater insight into the LES Reynolds num-ber and its
control, we evaluate ReLES= /LES using theSmagorinsky eddy
viscosity representation for the SFSstress, as was done to
understand R in Sec. III D. There wederived an expression for the
LES viscosity LES Eq. 20.Using this expression, the numerical LES
viscous lengthscale is given by
LES LESu
=
1
Dtz eddy viscosity , 28
where = 1 for the Smagorinsky closure. Dividing by Eq.28, or
replacing R in Eq. 26 by Eq. 23, produces thefollowing expression
for the LES Reynolds number:
ReLES =
1
N
Dt
eddy viscosity . 29
021303-11 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
Several interesting observations can be extracted fromEqs. 28
and 29. Since the overshoot scales on LES andpeaks at 10LES Fig. 5,
the observation made in Sec. II Cfrom previous studiesthat the
overshoot is tied to thegridcan now be explained. Equation 28 shows
that ifneither the model constant nor the grid aspect ratio is
alteredwhile the grid is refined, the LES viscous scale LES,and
therefore the peak in m, will move closer to the surfacein
proportion to the grid spacing z. However, sinceDt=Ct
aARb is left unchanged during the grid refinement, R
and the magnitude of the overshoot will not changetheovershoot
simply moves closer to the surface, as shown inFigs. 3 and 5. In
particular, Fig. 5 shows that as the over-shoot moves toward the
surface in proportion to the gridspacing at constant AR and Ct, the
ratio TR1 /TS1 =R and mag-nitude of peak m remain unchanged, and
the locations ofpeak m remain attached to the crossover between TR
andTS.
A second interpretation follows by replacing ReLES with
/LES in Eq. 27. The criterion RR1 is then equiva-
lent to
LESz
LES
z=
21R + 1
0.2 closure independent .
30
Equation 30 states that the spurious length scale LES aris-ing
from friction within the SFS model and grid under-resolution in a
LES must be confined sufficiently well withinthe first grid cell
for numerical LES friction to not adverselyaffect the LES. Note
that Eq. 30 is equivalent to the re-quirement that z1LES
+ 5: the first grid level must be at leastfive times larger than
the spurious viscous length scale.
The inequality 30 is satisfied when RR, so that thefirst and
second criteria are met when the spurious viscouslength scale is
sufficiently small relative to the grid spacing.However Eq. 30 does
not guarantee the third criterionN
N
. This is because the overshoot peaks at 10LES, so
that the condition given by Eq. 30 still allows partial
reso-lution of the overshoot e.g., when 10LES /z2. Onecan therefore
interpret the addition of the third criterionN
N
as demanding that the spurious frictional lengthscale LES be
buried both sufficiently far within the first gridlevel z and
within the boundary layer that the grid isgiven no opportunity to
either create an overshoot or alterLOTW scaling through the
influence of friction within thesurface layer.
V. A FRAMEWORK FOR HIGH-ACCURACYLARGE-EDDY SIMULATION: THE
HIGH-ACCURACYZONE
By comparing Eq. 23 for R with Eq. 29 for ReLES welearn that
reducing the model constant and/or the grid aspectratio in the
combination Dt=Ct
aARb causes both R and ReLES
to increase and, correspondingly, LES /z to decrease.However,
increasing only the vertical resolution increasesthe LES Reynolds
number but has no effect on the ratio ofresolved to SFS stress R.
This observation leads to the con-
cept of a RReLES parameter space in which high-accuracy LES of
the high Reynolds number boundary layercould be developed. Within
this framework, one can system-atically adjust the LES of the
boundary layer so that, in thehigh Reynolds number limit, the
overshoot is suppressed andthe LOTW is captured. The RReLES
parameter space isillustrated in Fig. 6; a LES of the boundary
layer is identifiedas a point on a plot of R against ReLES. In
subsequent simu-lations, the LES is adjusted to move the point
within theRReLES parameter space relative to the critical
parametersR, ReLES
, and N
.
For the LES to capture the LOTW while resolving theovershoot,
the simulation must live in the rectangular spaceRR, ReLESReLES
. We have roughly estimated R1
and ReLES 350. However in addition to the criteria
RR and ReLESReLES
, we have argued for a third crite-rion N
N
. R and ReLES are linearly related by Eq. 26,
R = 21N ReLES 1 closure independent . 31Thus, N enters in the
slope of R versus ReLES. In Fig. 6 weplot Eq. 31 as a series of
lines with constant slope 21 /N.Since LOTW is only captured in the
supercritical region ofthe RReLES parameter space, in general 1
will vary frompoint to point on lines of constant slope 21 /N.
Howeverthe variation in 1 is not so great as to obscure the
stronginverse relationship between the slopes of the RReLES
linesand the vertical grid resolution N. It can be shown from Eq.27
that the third criterion N
N
is met when the simula-tion lies to the right of the RReLES line
with slope 21 /N
that passes through the intersection between R=R
andReLES=ReLES
, as illustrated in Fig. 6. We call the wedge-
shaped region that defines supercritical LES satisfying allthree
criteria RR, ReLESReLES
, and N
N
the highaccuracy zone HAZ. The LES must reside within the HAZto
meet the three criteria required to both eliminate the over-shoot
and capture the LOTW.
FIG. 6. Schematic of the structure of the RReLES parameter
space. Thisparameter space underlies the framework we propose for
designing a LESthat is capable of predicting LOTW scaling for U
/z.
021303-12 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
A. Designing LES to capture law-of-the-wall scalingThe objective
is to systematically move the LES into the
HAZ of the RReLES parameter space by combining Eq.31 with
knowledge gained from Eqs. 23 and 29. Al-though we have applied
eddy viscosity closures to gain in-sight into the process of
adjusting N, R, and ReLES to sys-tematically move the LES within
the RReLES parameterspace, the basic method can be applied with any
SFS stressmodel. TR1 and TS1 and therefore R and LES and
thereforeReLES can be quantified independently of the SFS model,the
only requirement being that all contributions to the SFSstress are
included in defining ij
SFS before calculating TS1.This relatively simple process may be
described in two basicsteps.
1 Adjust, and hold fixed, the vertical resolution of the gridNz
so that when the simulation is fully developed, N
will exceed N
typically, Nz1.5N2N to minimizethe influence of the upper
boundary condition. We shallpoint out that it is possible to
over-resolve in the verti-cal.
2 Then systematically adjust the aspect ratio of the
gridtogether with the model constant to move the simulationroughly
along a straight line in Fig. 6 from the subcriti-cal region of the
RReLES parameter space into theHAZ. With eddy viscosity closures,
the model constantand aspect ratio appear in the combination
Dt=Ct
aARb.
However, to move into the HAZ with any other closure,one would
adjust the model constant for that closure tosystematically reduce
the SFS stress together with asystematic increase in the horizontal
resolution of thegrid to systematically reduce the aspect
ratio.
We presume that the closure for SFS stress relies on
adissipative mechanism to model the net transfer of
resolvedturbulence energy to SFS motions. With this methodologyfor
designing LES one can analyze systematically whatworks better or
worse depending on the choice of modeltype, model details, model
constant, grid resolution, gridstructure, algorithm, geometry,
etc., with some understandingof underlying mechanisms. This
framework provides theLES community with both physical
understanding and struc-ture upon which a systematic procedure for
LES design maybe based. Once the researcher has become experienced
withthe method, she/he will be able to design high-accuracy LESmore
rapidly using her/his favorite SFS model, algorithm,code, etc.
Whereas the model constant Ct and the model lengthscale t=Ct are
uniform in the above discussions, in thegeneral eddy viscosity
model the length scale t is specifiedas varying with z. The Mason
and Thomson1 modification ofthe length scale t near the surface and
the dynamic proce-dure that adjusts the Smagorinsky constant Cs
with z e.g.,Port-Agel et al.4 are examples. The primary issue is
thatthe level of eddy viscosity be adjusted in concert with thegrid
aspect ratio i.e., the horizontal resolution of verticalmotions
within the first few grid levels from the surface,where
under-resolution is of primary concern and mean SFSstress competes
with resolved stress.
B. Grid-independent LES and practical limitson grid
resolution
As discussed in Sec. II C, a problem with current LES ofthe ABL
is grid dependence in the mean flow. We shall showin Sec. VI that
as the simulation moves systematically intothe HAZ within the
RReLES parameter space, a grid-independent solution for the mean
velocity is achieved.However, one cannot move the simulation
infinitely far intothe HAZ along lines of fixed vertical grid
resolution N,since that would require that either the model
constant bedriven to zero removing the model from the dynamical
sys-tem or the grid aspect ratio would be taken to zero
creatinginfinitesimally thin grid cells and large computational
ex-pense. Either of these limits will cause numerical problemsand
simulation error regardless of computational expense.Thus, for both
accuracy and practical reasons, the optimallocation for the
simulation within the HAZ is near the apexof the wedge in Fig. 6
where RR, ReLESReLES
, and
NN
.
Similarly there are practical limits on vertical resolutionthat
surprisingly confine the growth of LES grids on anygiven computer.
Although a minimum vertical resolution isrequired to move the
simulation into the HAZ, progressiveincreases in vertical
resolution will force the simulation ontolines in the RReLES
parameter space that have progres-sively smaller slopes, as
illustrated by the dashed line in Fig.6. Increases in vertical grid
resolution in the absence of otheradjustments will increase the
grid aspect ratio, driving R tosubcritical values and restoring the
overshoot along with itsrelated errors. With eddy viscosity models,
for example, inorder that RR as N is increased, Dt=Ct
aARb must be held
constant Eq. 23. However, since the minimum model con-stant and
maximum grid aspect ratio are bounded, grid as-pect ratio must, at
some point, be maintained roughly fixedwith increasing vertical
resolution, and horizontal grid reso-lution must increase
proportionally with N. The number ofgrid points will therefore
increase approximately as N
3, se-
verely limiting the vertical resolution to modest values.
Thisdilemma is reminiscent of DNS where the highest Reynoldsnumber
that can be simulated accurately grows slowly withincreasing
computer size due to the rapid increase in reso-lution requirements
with increasing Reynolds number.
VI. NUMERICAL EXPERIMENTS
To evaluate the theory and further explore the applica-tion of
the RReLES framework to the development of wallbounded LES, we have
carried out over 110 LESs of theneutral shear-driven ABL capped
with an inversion layer tosuppress boundary layer growth and
produce a quasistation-ary long-time solution. The Coriolis force
is included at arelatively high level to reduce the time to reach
quasistation-ary, so the mean wind is skewed relative to the
geostrophicwind x direction at the first grid level see Appendix
A.The code is pseudospectral in the horizontal and finite
differ-ence in the vertical, so numerical dissipation is minimal.
Inthe horizontal statistically homogeneous directions we
applyperiodic boundary conditions; in the vertical we apply
theboundary conditions, as described by Moeng38 and Sullivan
021303-13 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
et al.40 We report here on simulations with the
Smagorinskyclosure and uniform grid spacing. In particular, we
apply thenonlinear Moeng38 model for total fluctuating shear stress
atthe lower surface and the friction velocity is made propor-tional
to the mean wind at the first grid level with a propor-tionality
constant that can be related to the surface roughnesslength scale
z0. A summary of the numerical algorithm andsimulations is given in
Appendix B and in severalpublications.2,21,38,40
It should be noted that in our code, dealiasing in thehorizontal
directions is carried out by padding rather thantruncation. These
are equivalent except in the interpretationof the grid and grid
length scale: the grid resolutions andaspect ratios quoted in the
figures are before padding and thegrid length scale = xyz1/3 used
in the eddy viscositymodel Eq. 15 is also based on the prepadded
grid. In allplots we define the boundary layer thickness at the
heightwhere the mean velocity gradient crosses zero. Whereas
thenumber of grid points in the vertical Nz is defined before
thesimulation, the number of grid points within the boundarylayer N
is determined after a simulation is analyzed in thequasistationary
state. We were careful to determine the qua-sistationary state
consistently in all simulations see Appen-dix B. In all plots of
mz=z we use a value of 0.40for .
A. The RReLES parameter space
In Fig. 7 we identify in the RReLES parameter space allthe
simulations carried out for the current study. As will bediscussed
below, from the predictions of mz we estimatedthe critical lines
R=R, ReLES=ReLES
, and N=N
drawn onthe figures. In Fig. 7a different symbols are used
accordingto the number of grid points in the vertical Nz 1.5N.These
show approximate correspondence to the straight linerepresentations
of Eq. 31 in Fig. 6 at constant slope21 /N. Note that the points in
Fig. 7a become notice-ably more linear as the simulations enter the
triangular HAZregion of the RReLES parameter space and 1 better
repre-sents the von Krmn constant. To demonstrate, as per Eq.23,
that R increases with decreasing Ds=Cs
2AR4/3
, in Fig.7b different symbols are used according to Ds
creatinghorizontal bands of distinct symbol type consistent with
in-creasing R. Note that the bands also shift to higher ReLESwith
increasing R and Cs
2AR4/3 as per Eqs. 26 and 29.
B. The high accuracy zoneTo show the transition from subcritical
regions of the
RReLES parameter space to the supercritical HAZ, considerthe 16
simulations on the four paths shown in Fig. 8 with thepoint
symbols. Each path has a fixed vertical resolution Nzand progresses
from lower to higher R and ReLES along linesof constant Nz, roughly
lines of constant slope 21 /N inEq. 31.
In Fig. 9 we plot mz against z / for each of thegroups of four
simulations at fixed Nz in Fig. 8. In Sec. IV Awe argued for the
existence of a critical vertical resolution N
below which the surface layer is insufficiently resolved andthe
LOTW can therefore not be properly captured. The four
groups of curves in Fig. 9 show the consequences of
poorresolution of the surface layer in the vertical and provide
anestimate for N
. In Fig. 9a the surface layer is resolved
with, at best, three grid points. This clearly insufficient
ver-tical resolution is associated with mz curves that incor-rectly
bend to the left from the surface with increasing z; thisoccurs
even when R exceeds 1. Furthermore, the under-resolution of the
surface layer in the vertical affects the meanvelocity gradient and
mean velocity profiles throughout theboundary layer; the mean
gradient decreases too rapidly in z.It is not until Fig. 9c, Nz=96,
that this spurious drop in mwith z transitions to the profile mz
extending verticallyfrom the surface as is required by LOTW. The
number ofgrid points in the surface layer up to z /=0.2 is 89,
sug-gesting that this is the critical resolution for the surface
layerand that N
for these LESs is 4045. We have drawn a lineat constant slope
/N
=0.4 /45 in Figs. 7 and 8 showing how
paths a and b remain outside the HAZ and paths c andd enter the
HAZ at higher R and ReLES.
By comparing the groups of m curves c and d inFig. 9, we note
that as the simulations progress to higher R
0
0.5
1
1.5
2
0 100 200 300 400 500 600 700
ReLES
(a)
*
Re*LES
N*
0
0.5
1
1.5
2
0 100 200 300 400 500 600 700
ReLES
(b)
*
Re*LES
N*
Ds
-
and ReLES along lines of constant Nz, in both groups the
finaltwo curves approach grid independence and the LOTW iscaptured
as the overshoot is suppressed. To study the transi-tion in the
surface layer in detail, and to estimate R andReLES
, we compare the six simulations shown in Fig. 8 with
the open circles which lie along each of the two paths,Nz=96 and
Nz=128. The variations in mz in the lower40% of the boundary layer
for each point along the two pathsare shown separately in Fig. 10.
Comparing the upper andlower sets of figures, we observe nearly
identical transitionsalong each of the two paths into the HAZ. At
the lowest Rand ReLES an overshoot obscures the surface layer and
theLOTW is not predicted by the LES. As R and ReLES increaseby
decreasing Cs
2AR4/3, the same transition in z takes
place along each path: the overshoot progressively decreasesand
a region of constant mz progressively strengthens un-til a
well-defined region of constant mz appears in thesurface layer that
is maintained when R and ReLES
exceedabout 0.85 and 350, respectively, using the Smagorinsky
clo-sure. The oscillations near the surface will be discussed
inSec. VII. The estimates for the lines that define the HAZfrom the
critical Smagorinsky model parameters R0.85,ReLES
350, and N
45 are drawn in Figs. 7, 8, and 11a.
Figure 10 shows that as Nz, Cs, and AR are adjusted so asto
progressively move the LES from the subcritical part ofthe
parameter space into the HAZ, the mean velocity gradi-ent
approaches a fixed point independent of the path takeninto the HAZ.
In Fig. 11 we plot the normalized mean ve-locity gradient
distributions for five of our computed LESswithin the HAZ at
different vertical grid resolutions N andcombinations Cs
2AR4/3
. Figure 11a shows the locations ofthese five simulations on the
RReLES parameter space allbut the + symbol. Figure 11b shows that
these simulationswithin the HAZ are approximately grid independent
over theboundary layer depth. In Fig. 11c we expand the surface
layer to show how the overshoot is suppressed and theLOTW is
captured by the simulation all but the dashedline.
In Fig. 7a we also show simulations from the literature.All but
the simulation by Drobinski et al.32 is well outsidethe HAZ. In two
simulations, one from Andren et al.14 andone from Port-Agel et
al.,4 R was sufficiently high to re-move the overshoot but the
vertical resolution of the gridwas insufficient for the LES to
produce LOTW scaling.
In Fig. 11a the Drobinski et al.32 simulation is indi-cated with
the plus symbol and in Fig. 11c with the dashedline. Drobinski et
al.32 used a different numerical algorithmand a one-equation eddy
viscosity model. Their model forsurface shear stress was not
indicated. Whereas their criticalparameters R and ReLES
are not necessarily the same sincethey used a different SFS
stress closure, their simulationappears to be well within the HAZ
Fig. 11a, their over-shoot is suppressed and they have captured
LOTW scalingFig. 11c. The Drobinski et al.32 simulation predicts a
dif-ferent numerical value for z in the surface layer than doour
simulations with the classical Smagorinsky closure andMoeng38
surface stress model. Whereas the Smagorinsky
0
0.5
1
1.5
2
0 100 200 300 400 500 600 700
ReLES
(9a) (9b)
(9c,10a)(9d)
(10b)
*
Re*LES
N*
FIG. 8. The systematic variations on the RReLES parameter space
for thesimulations plotted in Figs. 9 and 10. Figure 9a shows four
simulationswith the same vertical resolution, Nz=32, but decreasing
Cs
2AR4/3 represented
by +, , , and . The vertical resolutions in Figs. 9b9d are
Nz=64,96, and 128, respectively. The open circles show the
locations of the sixsimulations in Figs. 9a and 9b. The vertical
resolutions in Figs. 10a and10b are Nz=96 and 128,
respectively.
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5
z/
m
(a)
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5
z/
m
(b)
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5
z/
m
(c)
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5
z/
m
(d)
(b)(a)
(c) (d)
FIG. 9. Effect of vertical grid resolution on the LES
predictions of meanshear. Refer to Fig. 8 for the locations of the
individual simulations on theRReLES parameter space. R and ReLES
progressively increase in eachfigure in this order: +, , , . a
Nz=32, Nx=Ny increased from 32+ to128 . b Nz=64, Nx=Ny increased
from 64+ to 240 . c Nz=96,Nx=Ny increased from 64+ to 288 . d
Nz=128, Nx=Ny increased from64+ to 360 . =0.4 is assumed in forming
m. is defined as theheight where m=0. The dashed horizontal lines
indicated the upper marginof the surface layer.
021303-15 Designing large-eddy simulation of the turbulent
boundary layer Phys. Fluids 22, 021303 2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
model simulations in Fig. 11 predicted a von Krmn con-stant
0.33, the Drobinski et al.32 simulation produces a0.35. Factors
that affect the prediction of the vonKrmn constant are discussed in
Sec. VII C
It turns out that the von Krmn constant issue is asso-ciated
with the development of oscillations in mz at gridcells adjacent to
the surface Fig. 10. The oscillations growas the simulations move
farther into the HAZ along a line ofconstant Nz. As will be
discussed in Sec. VII, the oscillationsoriginate from the spurious
nature of the lower boundarycondition for fluctuating surface shear
stress. This observa-tion is interesting, in part, because it has
been previouslyreported that the LES of the ABL is insensitive to
the detailsof the lower stress boundary condition.2,41 These
simulations,however, were outside the HAZ and in the presence of
theovershoot and its frictional source.
VII. DISCUSSION
We consider a LES in which one models only what isrequired in
order to close the numerical problem, whereLOTW is a prediction and
not a forced result. We restrict theproblem to Reynolds numbers
where viscous or surfaceroughness scales cannot be resolved by the
grid, which weregard as highly practical. In this scenario, to
close the dis-cretized dynamical system, it is necessary to produce
a clo-sure for SFS stress and a model for total horizontal
stressfluctuations at the surface. Anything beyond this is out of
thescope of our analysis.
We have developed a theory to explain the basic issuesunderlying
deviations from LOTW scaling for mean velocitygradient and we laid
out a strategy for the design of LES ofhigh Reynolds number wall
bounded turbulent flows basedon the theoretical arguments. These
deviations extend be-yond the overshoot in scale mean velocity
gradient to en-compass LOTW of mean velocity in general. In this
sectionwe organize this understanding and briefly refer to new
is-sues that have arisen from this study and we discuss
theapplication of the current framework to the logarithmic
layermismatch problem in hybrid RANS/LES methods such asDES.18
A. Breakdown in law-of-the-wall scaling:Interior versus
surface
Deviations from the LOTW in mean velocity and veloc-ity gradient
in the inertial surface layer arise from a compe-tition between the
characteristic velocity length scales u andz and other velocity or
length scales that enter either from the
0
0.1
0.2
0.3
0.4
0.5 1 1.5m
(141,0.15)
1 1.5m
(230,0.38)
1 1.5m
(257,0.48)
1 1.5m
(370,0.93)
1 1.5m
(401,1.04)
1 1.5m
(454,1.27)
0
0.1
0.2
0.3
0.4
0.5 1 1.5m
(155,0.11)
1 1.5m
(243,0.26)
1 1.5m
(336,0.46)
1 1.5m
(479,0.90)
1 1.5m
(577,1.16)
1 1.5m
(669,1.39)
z/
z/
FIG. 10. Change in structure of mz as the LES moves toward and
intothe HAZ. Refer to Fig. 8 for the locations of the individual
simulations onthe RReLES parameter space; R and ReLES progressively
increase in eachpanel from left to right. Top panel: LES with
Nz=96. Bottom panel: LESwith Nz=128. ReLES and R are given on top
of each figure as ReLES,R.=0.4 is assumed in forming m. is defined
as the height where m=0.
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2
z/
m
(b)
0
0.05
0.1
0.15
0.2
1 1.5 2
z/
m
(c)
0
0.5
1
1.5
2
0 100 200 300 400 500 600 700
(a)
*
Re*LES
N*
(b)
(a)
(c)
FIG. 11. Five simulations in the HAZ at different N and
DsCs2AR
4/3,
demonstrating the convergence of the predictions of mz to a
relativelygrid-independent solution without the overshoot and
capturing the LOTW.a gives the locations of the five simulations in
HAZ. mz from Drobinskiet al. Ref. 32 are given in c with the dashed
curve and in a with the plussymbol +. =0.4 is assumed in forming m.
is defined as the heightwhere m=0.
021303-16 J. G. Brasseur and T. Wei Phys. Fluids 22, 021303
2010
Downloaded 23 Aug 2012 to 134.58.253.57. Redistribution subject
to AIP license or copyright; see
http://pof.aip.org/about/rights_and_permissions
-
true fluid physics or during the conversion to the
discretizeddynamical system that is ultimately advanced on the
com-puter. Turbulence motions in the surface layer at the
charac-teristic length scale z, for example, may compete with
mo-tions at the boundary layer scale Khanna and Brasseur21 orwith
the influences of surface friction or roughness that
arecharacterized by the length scales = /u and z0. If suffi-ciently
strong, these confounding scales will alter the scalingU /zu /z in
the inertial surface layer. LOTW assumesthat this is not the case
and experiments in the laboratory andatmosphere have generally
supported this assumption whenthere are no confounding scales and
the ratio of the outer toviscous length and roughness scales is
sufficiently large.However, when the influence of confounding
characteristicscales is sufficiently strong to compete with u and z
in theinertial surface layer, deviations from LOTW result.
What we have shown here is that in the conversion fromthe exact
continuous dynamical system to the LES dis-cretized dynamical
system that is actually advanced on thecomputer, additional
characteristic scales are introduced intothe simulated dynamics
that can interfere with LOTW scal-ing in the surface layer when
sufficiently strong. Several el-ements in the simulation might
introduce spurious character-istic scales: i models of existing
terms and new terms thatare introduced into the governing equation,
ii models forunknown boundary conditions, iii the type and order of
thediscretization of derivatives together with grid geometry, andiv
algorithmic additions, for example, to maintain numeri-cal
stability. The current study has focused primarily on theinfluences
of a spurious viscous length scale that is intro-duced within the
computational domain by the model for theSFS stress tensor. This
spurious scale is a reflection of themanner in which the net
transfer of turbulence energy fromresolved to SFSs is modeled.
Whereas the interscale interac-tions that underlie the transfer of
energy are purely inertial inreality, all practical closures for
the SFS stress tensor modelthe net transfer of energy from the
resolved scales by a dis-sipative mechanism that removes energy at
the smallest re-solved scales.
However, the SFS stress is often not the only term that
ismodeled in the conversion from the continuous to the dis-crete
dynamical system. At the very high Reynolds numbersof practical
interest, and at which LOTW is valid, the surfaceviscous layer, if
it exists, cannot be resolved in a LES. Thevertical derivatives in
resolved and SFS stress therefore re-quire that a model be supplied
for the total stress at thesurface. Hybrid schemes couple a RANS
SFS stress modelon a very high aspect ratio RANS grid in an
extremely thinsurface viscous layer with LES and SFS closure on a
LESgrid beginning in the lower inertial surface layer, also
verynear the surface. Thus, the LES part of the simulation
obtainsthe lower boundary condition on stress from the RANS partof
the simulation, which is far from exact. Nonhybrids












![Discharging/Charging Voltage-Temperature Pattern ... · =purelin(W p+b1): (5) B. Recurrent Layer The recurrent layer is known as the MAXNET [14] and a competitive layer which performs](https://img.pdfslide.us/doc/110x75/5f301d42d3b24008221ec8c3/dischargingcharging-voltage-temperature-pattern-purelinw-pb1-5-b-recurrent.jpg)