Embed Size (px)
Citation preview

Artificial Immune System based Cooperative Strategies for Robot Soccer Competition
International Forum on Strategic Technology, p.p. 76-79, Oct. 2006.

Outline
Abstract Introduction Biological Immune System Cooperation Strategy Based On Immune Network Results of Simulation Conclusion

Abstract This study proposes an immune network based
cooperative strategy for robot soccer systems. The strategy enables robots to select proper behaviors from 'Shot', 'Pass', 'Kick', 'Chase', 'Track', and 'Guard'. In addition, the proposed layered immune network achieves cooperation and coordination between each robot.
The proposed architecture is evaluated on the SimuroSot Middle league, a 5-vs-5 simulation platform in FIRA.

Introduction
A multi-agent system (MAS) is a very popular field of artificial intelligence. It can be thought of a group of interacting agents working together to achieve a sequence of tasks.
Consequently, cooperation strategies in multi-agent system have aroused remarkable interest in recent years.

In this study, cooperation strategy based on layered immune network is proposed for a robot soccer game evaluated on the SimuroSot (SIMUlated Robot Soccer) Middle league.
It is one of the soccer simulation leagues in FIRA, with five players involved in the game. A snapshot of an actual simulation game is illustrated in Fig. 1.

Fig. 1. 5-vs-5 Simulation Platform.

Biological Immune System
The immune system protects living bodies from the invading of foreign substances called antigens.
Lymphocytes float freely in blood and lymph nodes, and patrol everywhere for antigens, then gradually drift back into the lymphatic system, to begin the cycle all over again [3].
There are mainly two types of lymphocytes, namely B-cells and T-cells, which play an important role in immunities. The former takes part in the humoral immunity that secretes antibodies (Abs) by clonal proliferation, and the latter takes part in cell mediated immunity.
One class of T-cells, called Killer T-cell, destroys the infected cell whenever they recognize the infection. The other class which trigger clonal expansion and stimulate /suppress antibody formation is called Helper T-cell.

In this study, the dynamic equation proposed by Farmer [5] is employed as a reactive immune network to calculate the variation on the concentration of antibodies, as shown in the following equations:
1 1
1
12
1 exp 0.5
Ab AbN Ni st su
il l ki k i i il k
ii
dA tm a t m a t m k a t
dt
a tA t

Cooperation Strategy Based On Immune Network
Fig.2. The architecture of the proposed immune network.

The proposed mechanism, imitating the cooperation between B-T cells, can help the robot adapt to the environment efficiently.
In the immunology, the T-cell plays a remarkable key role for distinguishing a "self' from other "non-self' antigens.

In addition to the goal keeper, the basic behaviors of the other four robots are kick, pass, chase, track, guard, and shoot.
Therefore, each robot possesses an immune network containing these six actions/antibodies.
Besides, these four immune networks generate a second-layer immune network as Fig. 3.

Fig.3. The architecture of the proposed layered immune networks.

As to the antigen, it represents the environment information received by sensors. Because the final goal of the robot soccer game is to shoot the ball into the opponent team's goal and keep the ball from own team's goal.
Consequently, the antigen is defined as { , , }. Therefore, the affinity value of each antibody and antigen is average value of these three terms, i.e.
which are described as follows:
bgdgA brd cw
biA
gA
/ 3i b r cwm m m m

affinity associated with the ball and robot :
Fig.4. Membership functions of affinity
bm
bm

Fig.5. Division of the soccer field

affinity associated with the ball and robot :
Fig.6. Membership functions of affinity
rm
rm
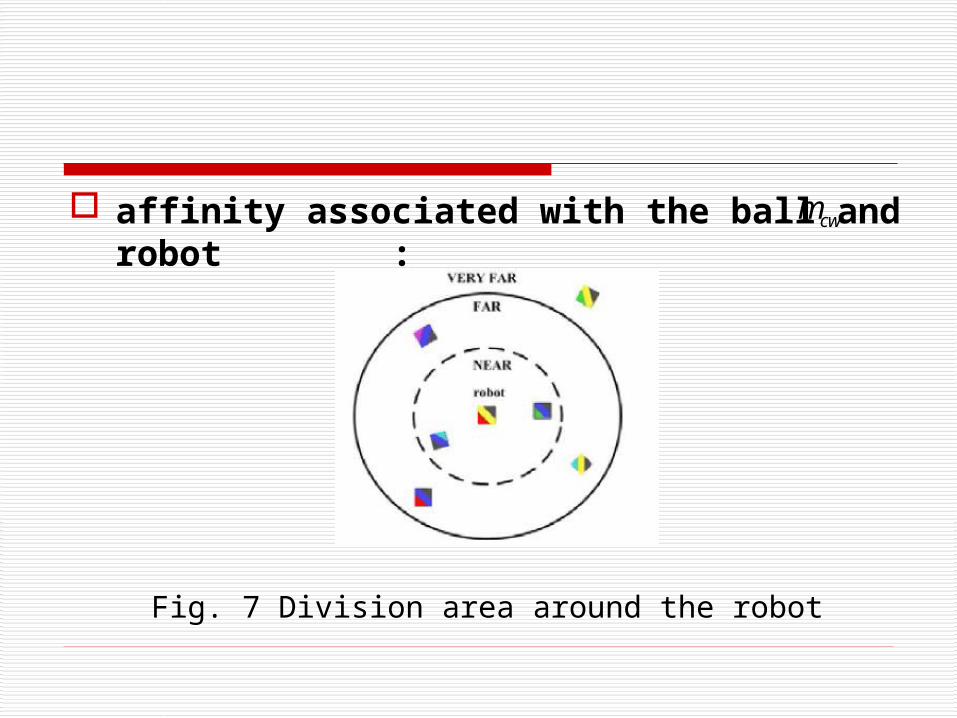
affinity associated with the ball and robot :
Fig. 7 Division area around the robot
cwm

Then the affinity value is derived employing the following equation
1 2 3few medium manycw
few medium many
x x x x x xm
x x

Table 1
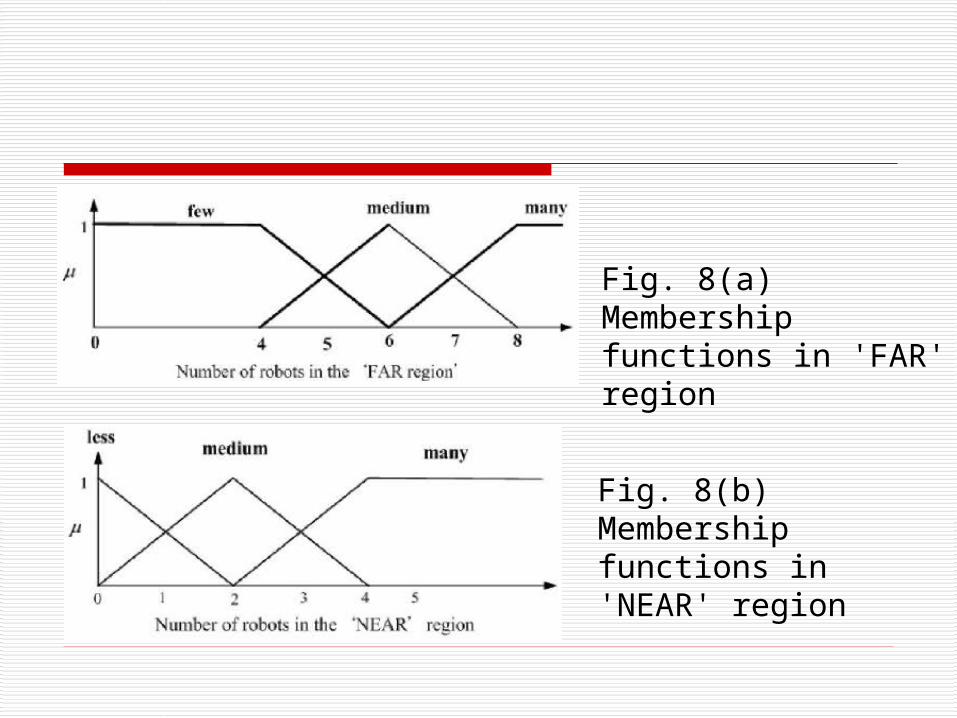
Fig. 8(a) Membership functions in 'FAR' region
Fig. 8(b) Membership functions in 'NEAR' region

Results of Simulation
Fig. 9 Robot 1 and Robot 2 take the same 'Track' behavior

Fig. 10 Three different robots take three different behaviors

Conclusion
Fig. 11(a) Robot tries to pass ball to its teammate

Fig. 11 (b) Ball is successfully passed to the receiver

Fig. 12(a) Robot takes 'Shot' behavior
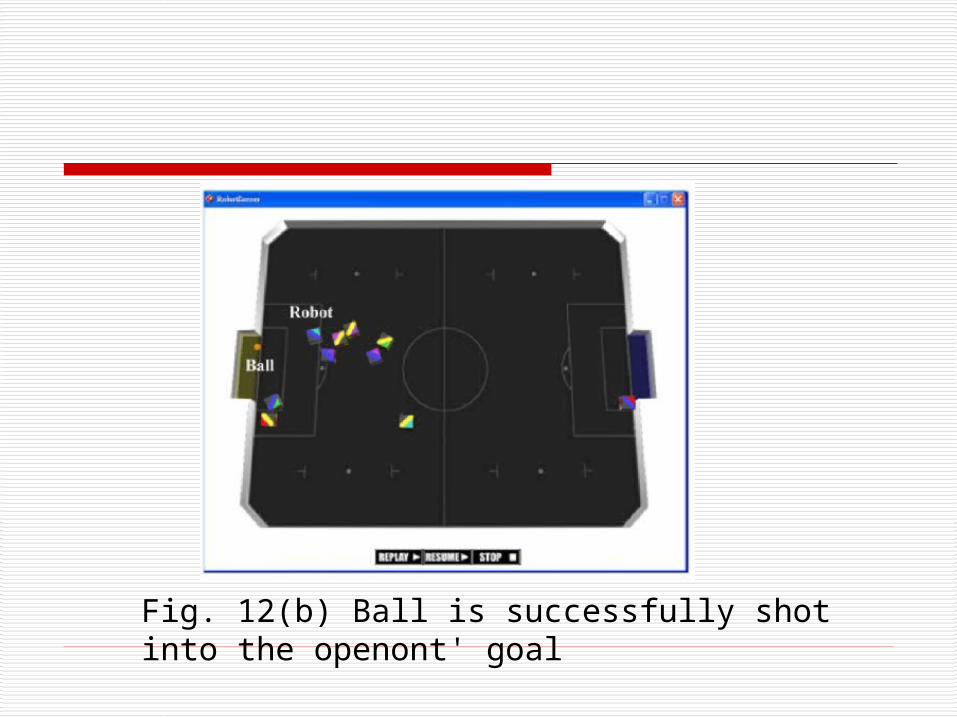
Fig. 12(b) Ball is successfully shot into the openont' goal

Thank you !!