-
7/29/2019 Article 1 Popa
1/6
-
7/29/2019 Article 1 Popa
2/6
The traction sum for the movement on a longitudinal inclined
plane at the
angle will be:( ) ( ) ++= sinGGcosfZfZF 2211maxm (5)
The power sum will be:
11tr3
RR1p3
pp
3me
10
M
10
M
10
M
+
=
[kW] (6)
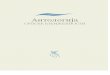
Figure 1.1 The schemata of the forces and moments which
actuate
on a bunkerless combine with semi-trailer
1.2 Self-Propelled Bunkerless Combine with Towed
Semi-Trailer
The forces and moments which actuate on the combine are
presented in
figure 1.1.
Compared to the previous case, now there appears the traction
force Ft .
When the moving speed is constant (v = ct) the equation of the
traction sum is:
t22112 FfRfRZ ++= , where (7)( ) 3cr33t fZGfZF == when the unit
moves on horizontal plane( 3c )r33t fZcosGfZF == when the unit
moves on a longitudinal
inclined plane.
Zc is part of the semi-trailer weight and of the load supported
by the towinghoop, respectively:
(8)cr ZZG +3The reaction Z1 will result from the equation of
moments related to point B:
( ) ( )( ) ( ) 0hFfrcZcfrbGGcfrLZ ct22c22111 =++++++++
( )( ) ( )cfrL
hFfrcZcfrbGGZ
11
ct22c221 ++
++++= (9)
The reaction Z2
will result from the equation of moments related to point A:
( ) ( ) ( )( ) 0hFfraGGfrfrLZfrLcZ ct112211211c =++++++
-
7/29/2019 Article 1 Popa
3/6
from which:
( )( ) ( )
2211
ct11c112
frfrL
hFfrcLZfraGGZ
+++++++
= (10)
The reaction Z3 will result from the equation of moments related
to point C:
( ) 0aGfrLZ 1r313 = , from which:
331
1r3
frL
aGZ
= (11)
The reaction Zc will be calculated from the equation of moments
related to
point D:
( 0frbG)frL(Z 331 )r31c = from which:( )
331
331rc
frL
frbGZ
= (12)
We do the checking: rc GZZ =3 (13)That is
( ) ( ) ( )r
331
331r
331
311r
331
1r
331
31r GfrL
frLG
frL
frbaG
frL
aG
frL
frbG=
=
+=
+
where .111 Lba =+The power sum will be:
11tr3
RR1p3
pp
3me
10
M
10
M
10
M
+
=
[kW] (14)
The power at the driving axle must ensure the movement of the
combine as a
unit together with the semi-trailer.
The power necessary to tow semi-trailer will be:
3t
t10
vFP
= [kW] (15)
where v is the working speed in m/s.
The working speed ( )= 1vv t (16)where vt is the theoretical
speed in m/s and is the slipping.
2. THE COMBINE MOVEMENT ON A TRANSVERSAL INCLINE
AT AN INCLINATION ANGLE 2.1 Self-Propelled Combine Equipped with
Bunkers Without Towed Trailer
It is considered that the combine movement on the transversal
incline is
rectilinear and it is made at a constant speed (v = ct).
Soil reactions Zd and Zs on combine wheels are determined from
the equations
of moments related to points B and A according to the schemata
in figure 2.1:
( ) ( ) 02
BcosGGhsinGG
2
BcosVhsinVBZ gvd =++
from which:
-
7/29/2019 Article 1 Popa
4/6
( )
B
2
BcoshsinV
2
BcoshsinGG
Zvg
d
++
++
= (17)
( ) ( ) 02
BcosVhsinV
2
BcosGGhsinGGBZ vgs =++++
from which:
( )
B
2
BcoshsinV
2
BcoshsinGG
Zvg
s
+
= (18)
or
( )
B
hsin2
BcosVhsin
2
BcosGG
Zvg
s
+
+
=
( )
( )
( )( )[ ]++=
++=
=
+
+
+
+
++
++
=+
VGGcosB
2
BcosV2
2
BcosGG2
B
hsin2
BcosV
B
hsin2
BcosGG
B
2BcoshsinV
2BcoshsinGG
ZZ
vg
vg
sd
or ( ) ++=+ cosVcosGGZZ sd (19)
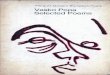
Figure 2.1 The schemata of the forces which actuate on the
combine during
its movements on a transversal incline at an inclination
angle
-
7/29/2019 Article 1 Popa
5/6
Combine harvesting has a maximal working incline of 120, the
movement
direction being identical to the general direction of level
curves.
According to the calculation schemata in figure 2.1 the combine
overturntowards the base of the incline (round the point A) is
possible if Zs = 0 (the stability
limit). So,
( )
B
hsin2BcosVhsin
2BcosGG
Zvg
s
+
+
= =0 (20)
from which it results that:
( ) 0hsin2
BcosVhsin
2
BcosGG vg =
+
+
or
( )
=
+ vg hsin
2
BcosVhsin
2
BcosGG
or
GG
V
hsin2
Bcos
hsin2
Bcos
v
g
+
=
GG
V
htg2
B
htg2
B
v
g
+
=
+
= vg htg2
B
GG
Vhtg
2
B
+
+=
++
GGV
12
BhhGG
Vtg gv
GG
Vhh
GG
V1
2
Btg
vg +
+
+
+= (21)
If hg = hv then:
gh2
Btg = or
gh2
Barctg= (22)
The above relation represents the limit angle in case of
overturn when hg = hv .
The condition of maintaining transversal stability to slipping,
according to
figure 2.1 is:
- for the front axle (usually driving)1y1 ZY =
- for the back axle, where2y2 ZY = y is the transversal
coefficient of
adherence.
sd21 ZZZZ +=+ (23)
-
7/29/2019 Article 1 Popa
6/6
2.2 Self-Propelled Combine without Bunker with Towed trailer
In case of trailer towing, on the bunkerless combine on
horizontal plane, there
also actuates the traction force Ft inclined at an angle related
to the longitudinalsymmetry axis of the combine. Ft can be
decomposed into the following components:
- on the longitudinal direction; cosFt- on the transversal
direction. sinFt
The condition of maintaining transversal stability to lateral
slipping is:
- for the front axle (usually the driving axle)1y1 ZY =
- for the back axle, where+= sinFZY t2y2 y is the
transversal
coefficient of adherence.
Soil reactions Zs and Zd dont change compared to the previous
case and the
expression of the limit angle in case of transversal overturn
remains the same.
To maintain stability to trailer lateral slipping there must be
fulfilled the next
conditions:- for the trailer front axle;r1yr1 ZY =
- for the trailer back axle.r2yr2 ZY =
3. CONCLUSIONS
3.1. For all the studied cases we have determined the stability
conditions both
on a horizontal plane and on inclined plane;
3.2. We have determined the power sum both for the solo combine
and for the
situation when it tows a semi-trailer;
3.3. The data established by this study are necessary to improve
stability,manoeuvrability and maniability.
BIBLIOGRAPHY
1. Dnil I., Neculiasa V.Maini agricole de recoltat, vol. 2,
Institutul Politehnic Traian Vuiadin Timioara, Facultatea de
Mecanic Agricol, curs litografiat, Timioara, 1987.
2. Dobrescu Constantin Optimizarea parametrilor agregatelor
agricole n scopul reduceriiconsumurilor, Redacia de propagand
tehnic agricol, Bucureti, 1981.
3. Dobrescu Constantin Studiul sistemic al agregatelor agricole,
Redacia de propagandtehnic agricol, Bucureti, 1985.
4. Ninulescu Traian Contribuii la creterea manevrabilitii
tractoarelor 4x4 prin utilizarea desoluii constructive noi pentru
puntea din fa-tez de doctorat, Universitatea Transilvania din
Braov, 2005;
5. Niescu Gh., Nstsoiu t., Popescu S. Tractoare, Editura
Didactic i Pedagogic,Bucureti, 1974;
6. Pisoschi Al.-Gr.Tractoare, automobile i sisteme de propulsie
note de curs, Universitatea
din Craiova, Facultatea de Mecanic, Craiova, 2003.
7. Tecuan N., Ionescu E.Tractoare i automobile, Editura
Didactici Pedagogic, Bucureti,1982.