Embed Size (px)
Citation preview
Arbib: Neural Computing, Round 3 1
From Brain Operating Principles to Computer Technology
Michael A. ArbibComputer Science, Neuroscience
and the USC Brain ProjectUniversity of Southern California
Los Angeles, CA [email protected]
Arbib: Neural Computing, Round 3 2
Rounds of Neural Computing
Round 1: Hebbian adaptation and Perceptrons: adaptation and self-organization in neural networks
Reinvigorated in the 1980s as work on reinforcement learning and backpropagation extended earlier insights.
Round 2: Compartmental modeling of the neuron Mead (1989) built on his earlier work on digital VLSI (Mead and Conway) to show how to exploit neuromorphic function in highly parallel analog VLSI
Arbib: Neural Computing, Round 3 3
A Prospectus for Round 3
Analyzing the architecture of the primate brain to extract neural information processing principles and translate them into biologically-inspired operating systems and computer architectures interplay between feedforward and feedback pathways sharing of neural resources between perception and action the role of plasticity in sensory, motor and “central” processing
A Contrast: Rounds 1 and 2 are based on brain capabilities that come from [components of] single neurons (synaptic plasticity and dendritic tree complexity, respectively)
Work on Round 3 will develop the theme that many of the most interesting capabilities of the brain result not just from the individual component mechanisms, but from large scale organization as well
Arbib: Neural Computing, Round 3 4
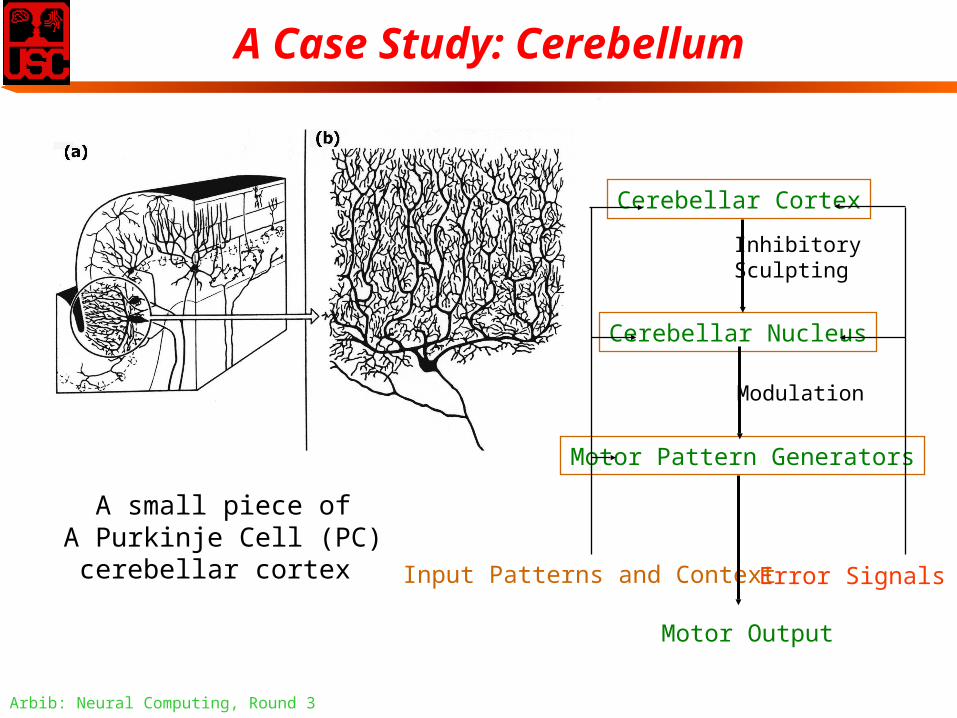
A small piece of A Purkinje Cell (PC) cerebellar cortex
A Case Study: Cerebellum
Cerebellar Cortex
Cerebellar Nucleus
Motor Pattern Generators
Input Patterns and Context Error Signals
InhibitorySculpting
Modulation
Motor Output
Arbib: Neural Computing, Round 3 5
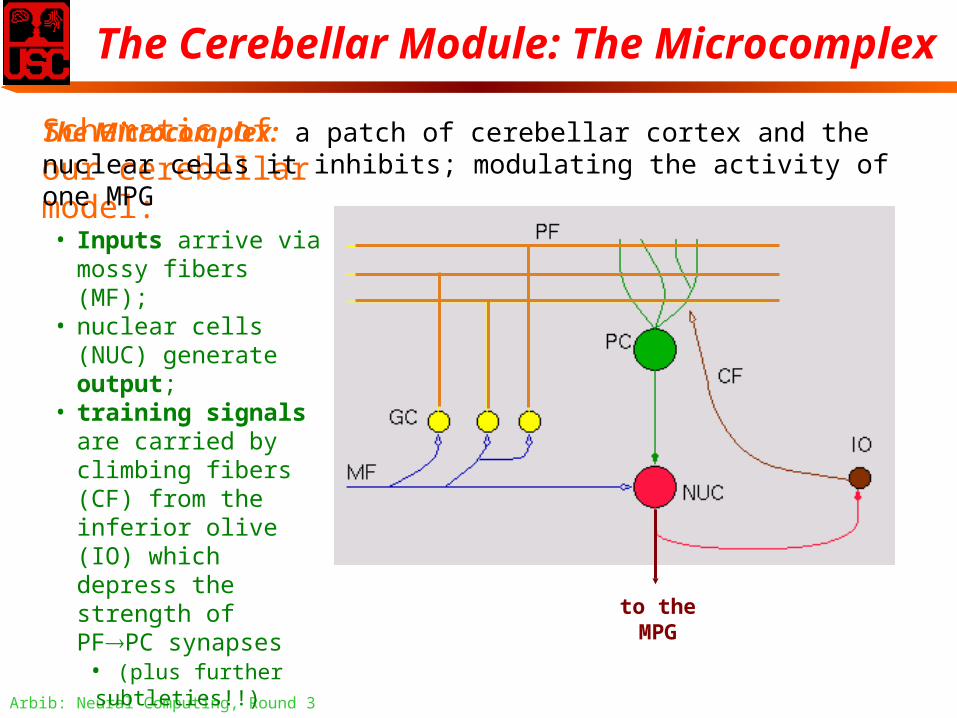
The Cerebellar Module: The Microcomplex
Schematic of our cerebellar model:
• Inputs arrive via mossy fibers (MF);
• nuclear cells (NUC) generate output;
• training signals are carried by climbing fibers (CF) from the inferior olive (IO) which depress the strength of PFPC synapses• (plus further subtleties!!)
The Microcomplex: a patch of cerebellar cortex and the nuclear cells it inhibits; modulating the activity of one MPG
to the MPG
Arbib: Neural Computing, Round 3 6
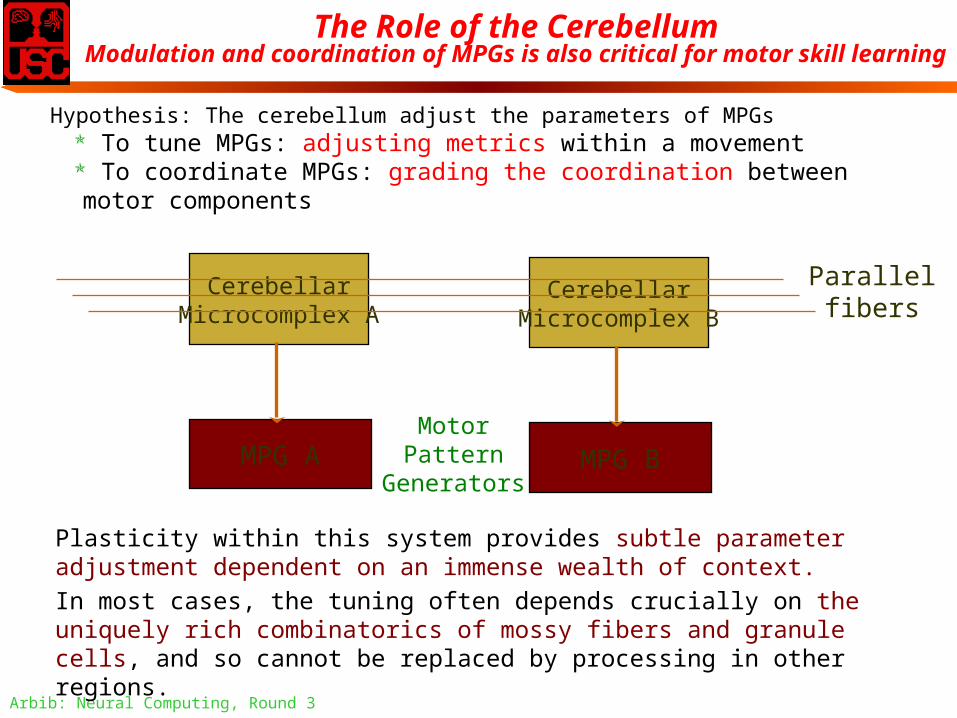
The Role of the CerebellumModulation and coordination of MPGs is also critical for motor
skill learning
Hypothesis: The cerebellum adjust the parameters of MPGs To tune MPGs: adjusting metrics within a movement To coordinate MPGs: grading the coordination between motor components
Plasticity within this system provides subtle parameter adjustment dependent on an immense wealth of context.
In most cases, the tuning often depends crucially on the uniquely rich combinatorics of mossy fibers and granule cells, and so cannot be replaced by processing in other regions.
CerebellarMicrocomplex A
MPG A
CerebellarMicrocomplex B
MPG B
Parallelfibers
MotorPattern
Generators
Arbib: Neural Computing, Round 3 7
Lessons from the Cerebellum
This brief review of the cerebellum shows three things:
1) The special type of learning involved learning how to reduce errors by adjusting the inhibitory sculpting to apply in different contexts
2) The immense subtlety of individual neurons, 3) The way these details are all embedded
within a high-level architecture.
Points (1), (2) and (3) correspond to what I call Rounds 1, 2 and 3 of neural computing.
Arbib: Neural Computing, Round 3 8
A Few Brain Operating Principles
Winner-Take-AllExtensively used in several models
Dynamic re-mapping Double saccade Path integration for locomotion
Reinforcement learningActor-critic modelHierarchical Reinforcement learning
Competitive Queuing Attention control: the combination of a “saliency map” with an “inhibition of return” mechanism forms the basic mechanism for controlling attention deployment in contemporary computational models of focal visual attention
Parallel recall from long term memory
Arbib: Neural Computing, Round 3 9
What is a Database in the Brain?
Classic Database Style: Maintain (perhaps in a federation of databases) a coherent set of correct up-to-date master data
Provide a set of “Views” customized to different users Passive data with external inference engines
The Brain’s “Database Style” is Cooperative Computation: Maintain different views of the “data” as separate entities each separately updatable by experience
Coordinate views (more or less) as they are dynamically integrated for action in novel situations
Active schemas which integrate data and the processes for deploying them
Arbib: Neural Computing, Round 3 10
The Claim: Brain Operating Principles have much to offer for future Computer Technology
But there’s a paradox:
millions or billions
15 to 25
8 plus 2
six billion
Arbib: Neural Computing, Round 3 11
Point and Counterpoint
I argue for the promise for computer science of developing an explicit formulation of the brain’s approach to “reusable computing” by adding evolutionary refinements to augment available circuitry to handle new tasks
that what is known about the organization and architecture of these capabilities is also critical to the development of a new approach to computer architecture and operating systems.
However, new architectural developments will include, but not be restricted by, biological principles:
Example: the inclusion of a non-biological reflection technology will allow the re-use of biological computing strategies in a way that in biology is available only on an evolutionary time scale.
Arbib: Neural Computing, Round 3 12
Programmable, Reflective Self-Organization
The goal: Extending brain-style computing by augmenting self-organization with “wrappings-based” programming to mobilize resources for each new problem
Seeking to exploit an understanding of how the brain marshals the specialized capabilities of different subsystems such as multiple levels of sensory analysis and integration declarative and episodic memory planning and motor control emotion and social interaction language and other communication interfaces
Issue: How can we have the wrappings/high-level specifications (the essence of a reflective architecture) keep track of the distributed self-organization of successful systems so that emergent resources can be recognized as providing approximate solutions to subproblems?
Aim: To have novel problems programmed by negotiating assemblages of resources …
Arbib: Neural Computing, Round 3 13
Focusing on the Mirror
We now consider a dramatic pattern of "re-use" in a neural architecture, focused on a whole progression of neural systems concerned with behaviors ranging from the visual control of grasping to the mirror system: action recognition and even the mirror system hypothesis: human language
Prior and continuing research modeling the primate mirror system extending the Mirror System Hypothesis
Round 3 of Neural Computation: Studying how sensory, planning and executive stages of neural processing converge in a flexible manner to yield a very powerful integrated system
Building on this to translate high-level neural computation principles into new computer systems and architectures.
Arbib: Neural Computing, Round 3 14
Visual Control of Grasping
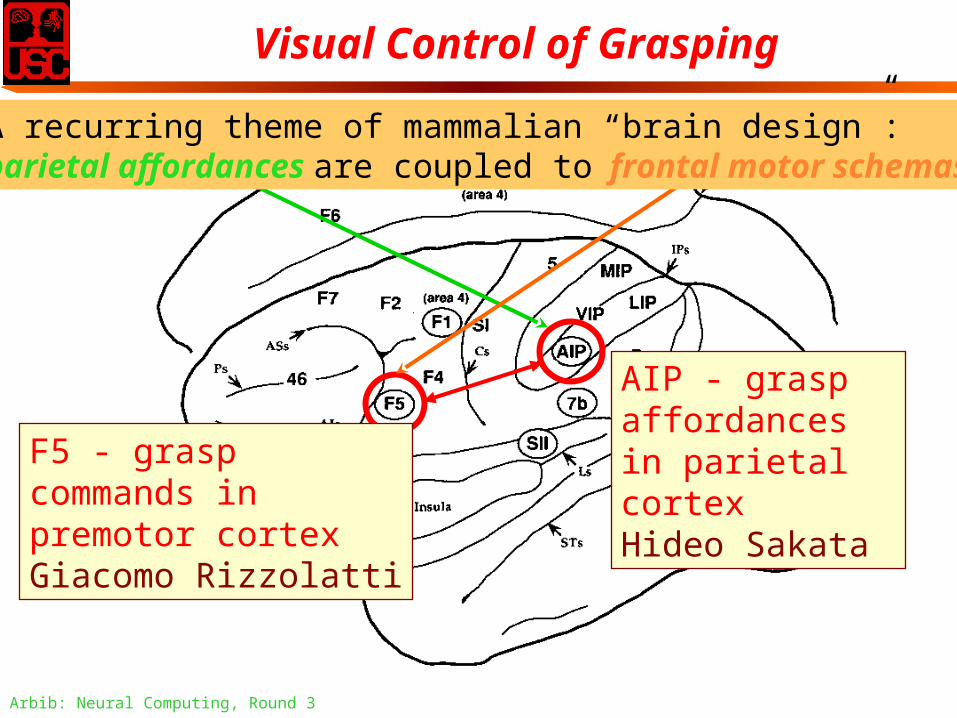
F5 - grasp commands inpremotor cortexGiacomo Rizzolatti
AIP - grasp affordancesin parietal cortexHideo Sakata
A recurring theme of mammalian “brain design”:parietal affordances are coupled to frontal motor schemas
Arbib: Neural Computing, Round 3 15
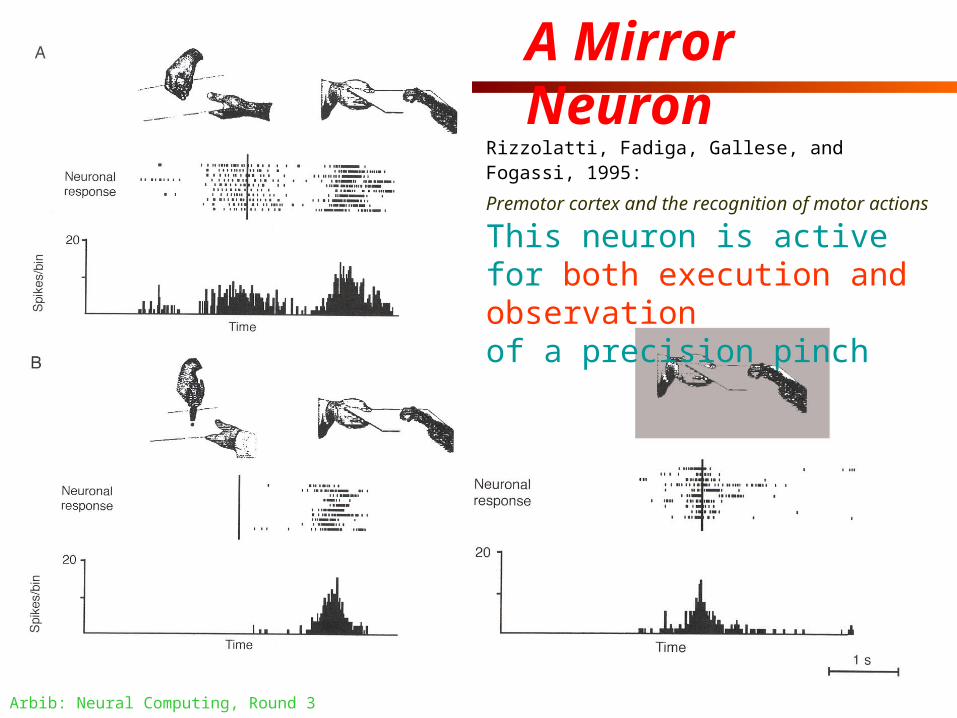
A Mirror Neuron
Rizzolatti, Fadiga, Gallese, and Fogassi, 1995: Premotor cortex and the recognition of motor
actions
This neuron is active for both execution and observation of a precision pinch
Arbib: Neural Computing, Round 3 16
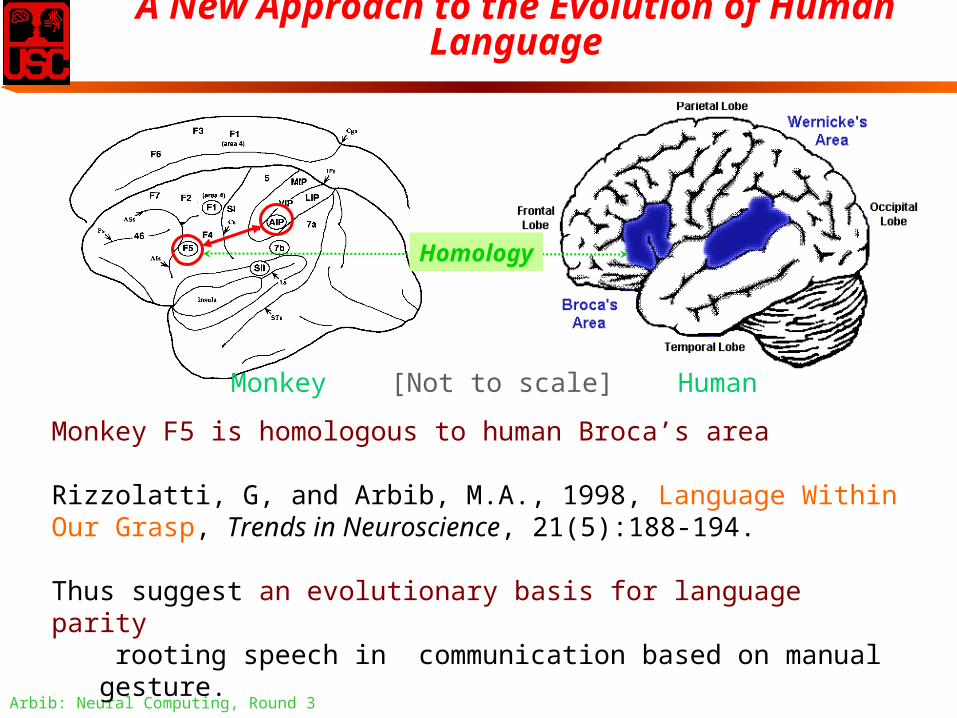
A New Approach to the Evolution of Human Language
Monkey F5 is homologous to human Broca’s area
Rizzolatti, G, and Arbib, M.A., 1998, Language Within Our Grasp, Trends in Neuroscience, 21(5):188-194.
Thus suggest an evolutionary basis for language parity rooting speech in communication based on manual gesture.
Monkey [Not to scale] Human
Homology
Arbib: Neural Computing, Round 3 17
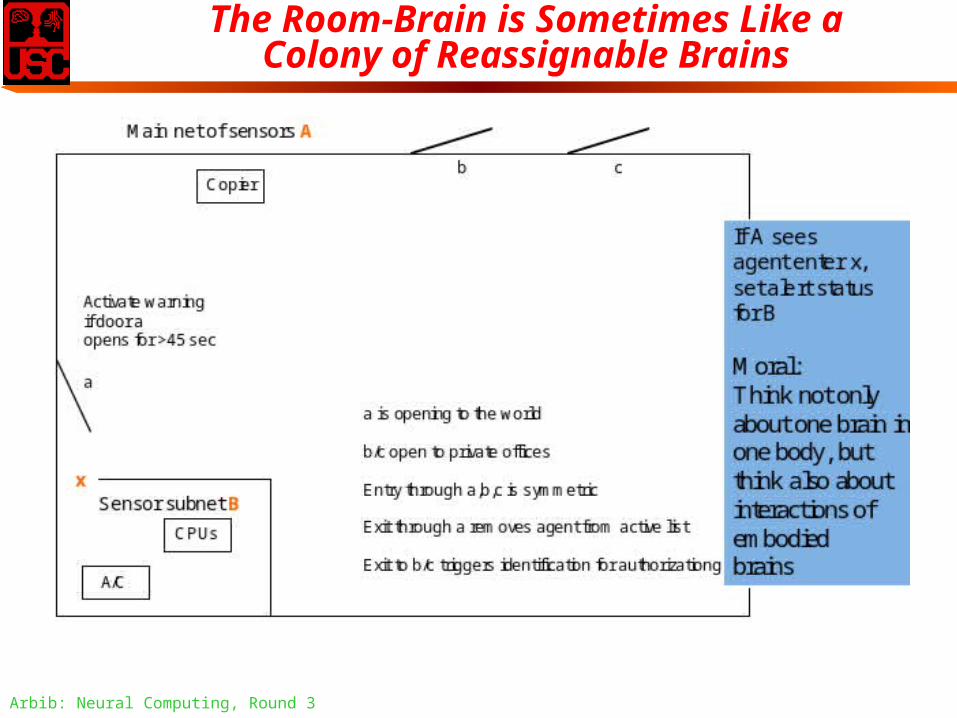
The Room-Brain is Sometimes Like a Colony of Reassignable Brains
Arbib: Neural Computing, Round 3 18
Tracking
Bottom-Up Attention Target acquisition saccades
Top-Down Attention Locating a designated targetFovea versus PeripheryRetinal coordinates Other reference framesSensor Fusion: Cues from different sensor setsSmooth PursuitSocial: Invoking extra cameras for different viewsGeneralizing the BOPs:Going from 2 eyes to n cameras What happens when you need to keep track of more objects and agents than you have cameras?
Arbib: Neural Computing, Round 3 19
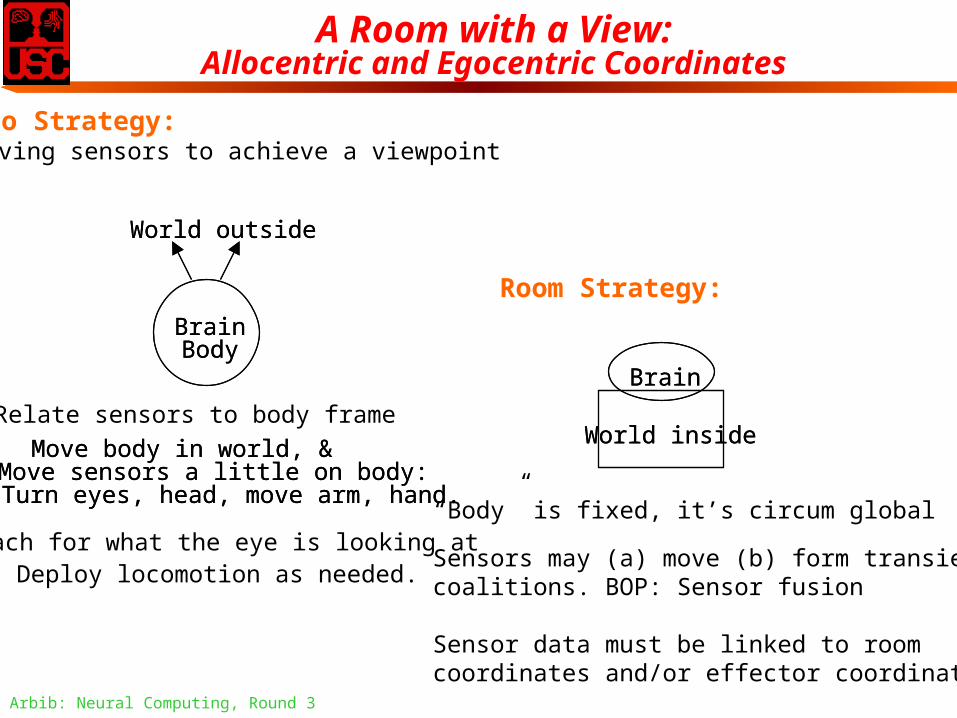
Room Strategy:
“Body” is fixed, it’s circum global
Sensors may (a) move (b) form transientcoalitions. BOP: Sensor fusion
Sensor data must be linked to room coordinates and/or effector coordinates
Reach for what the eye is looking atDeploy locomotion as needed.
Brain
World inside
Brain
World inside
World outside
BrainBody
Move body in world, &Move sensors a little on body:Turn eyes, head, move arm, hand.
World outside
BrainBody
Move body in world, &Move sensors a little on body:Turn eyes, head, move arm, hand.
Relate sensors to body frame
Bio Strategy:Moving sensors to achieve a viewpoint
A Room with a View:Allocentric and Egocentric Coordinates
Arbib: Neural Computing, Round 3 20
An Invitation
To learn more about this subject, takeCS564: Brain Theory and Artificial Intelligencenext Fall.
…. and read the book!!