Embed Size (px)
Citation preview

ApproachApproachThis system is centered around the concept of “groggy”, or tiered, wake up. This stands in contrast to the more common binary wake up systems, which have only two modes:
Fully active: collecting all possible data and drawing maximal power
Fully asleep: collecting no data and drawing virtually no power
Instead, we envision a system with a number of different levels of activity and associated power usages. Each level comprises the currently active sensors for state determination and their sampling rate, together with algorithms to describe the level transitions.
The system is dynamically optimal, such that at any given time, it is collecting and processing data based on its current (determined) state. This will provide performance which far exceeds our current systems, which are optimized for a single state.
The form of the solution is such that the sensor sampling rates, as well as the transitions between them, are generated in a semi-autonomous fashion and can easily be embedded in hardware. Therefore, the work should be applicable to a wide variety of applications.
For desired application, the design process proceeds as follows:
•Hardware for the application is configured using a compact wireless modular sensor platform. For testing and sample data collection, it is assumed that the system will include any sensors that could possibly be of value for state determination.
•A training data stream is collected with this hardware, and is annotated by the application designer to indicate the states of interest which the classifier will detect.
•These annotated examples are used to construct a classifier that will determine the current system state. A decision tree classifier is used in this work since its hierarchical structure allows for different levels of sensing to determine different states (or portions thereof).
•The chosen tree is implemented in embedded hardware. Sensors are duty-cycled to reduce power usage and hysteresis is added to the sensor de/activation to reduce the effect of glitches. The sensor set used by the classifier allows the final, possibly pared down, form of the hardware to be built and the data collection to be implemented on it.
HardwareHardware
To simplify the rapid prototyping of wireless sensor systems, a modular sensor platform was designed. Overall, the goal was to allow the user to treat sensing as a commodity, i.e. allowing an application to trivially incorporate different kinds of measurement. There were two keys to achieving that goal:
Encapsulation Knowledge: A single pane of a modular system can
• represent the best practices in a given field
• save a large amount of design time
E.g., an RF pane with a proper HF transceiver and antenna layout.
Simplifying prototyping: Rather than proceed directly to a final layout, this platform makes it possible to build a prototype to:
• collect the relevant data
• help detect flaws in the design
There are three key philosophies in the individual board designs:
• Individual panes should be combinations of circuitry that cannot or should not be separated
• It must be as easy as possible to combine and recombine the panes into new applications
• Expandability is key to future utility
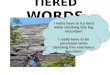
Processor/Transceiver Inertial Measurement Ambient Sensing
Sample Boards from the Modular Sensor Platform
The criterion used to choose the best sensor to test at each node is modified as follows:
where C(split) was the original criterion, / are fixed parameters and W is used to adjust the power/accuracy trade-off.
TestCost is set to zero for sensors used previously in the tree, since their data is already available for further use.
/ are chosen such that active sensors do not alter the criterion while unused sensors are weighted relative to their cost.
Classifier ConstructionClassifier Construction
A decision tree classifier is constructed which dynamically orders the activation of the sensors, such that only the data necessary to determine the system state is collected at any given time. The tree make decisions based on windowed features of the collected data and is trained with annotated examples collected using the prototype hardware. This process can be tuned to trade-off accuracy and power.
The standard tree construction algorithms were modified by adding a weighting factor relative to the cost of each of the features - in this case, the energy necessary to measure sensor values. This weighting can be adjusted, allowing the construction of a population of trees which range from ignoring energy use to making it the most important criterion. The desired tree on the power/accuracy plane is chosen by the designer.
WTestCost
splitCsplitC
))((
)()('
Small glitches in the data stream can change the current node of the decision tree, causing the spurious de/activation of sensor. The addition of on/off latencies allows system to smooth over these glitches and avoid unnecessarily changes in the sensor state.
For false activation of the sensors, the cost is a small amount of wasted power. Therefore, the on latency is short.
For false deactivation, the cost is a significant delay to reacquire enough data to be able to calculate the windowed feature. Therefore, the off latency is long.
Embedded ImplementationEmbedded Implementation
The real-time operation of the hardware is given by the tree activity level. A reloading timer is set for the current update rate and the processor is put to sleep. The processor is awakened by the timer overflowing and turns on the desired sensors. As each sensor completes its wake up cycle, it is sampled and then turned off. Once all the sensors have been sampled, the data analysis is done and the state is determined. In the interesting states, the system responds as chosen by the designer, e.g. by making a notation of the occurrence, collecting data, or cuing the user. Once these actions are complete, the processor returns to sleep mode.
Groggy Wakeup:Groggy Wakeup:An Automated Framework for Power-Efficient Detection in Smart Sensor Systems An Automated Framework for Power-Efficient Detection in Smart Sensor Systems
OverviewOverview
This work improves the power efficiency in wireless sensor nodes through high-level algorithmic means rather than low-level technical ones. We start from a fundamental:
The raison d'etre of these devices is to collect and process data and therefore the design of the sensors should be central.
We concentrated on reducing the energy usage of the sensors within the nodes, which correspond to further power savings through a reduction in:
• data to process• data to transmit or store• data to analyze (particularly for a human expert)
Any gains through this work are independent from the large body of work exploring power savings through improvements to ad-hoc networking protocols and processor efficiency, including improvements to the software, hardware, and RF efficiency.
Our goal is to extract the desired information available in the environment at any given point in time for the smallest outlay of energy, reducing the amount of data collected without affecting the amount of useful information.
Smart sensor nodes are currently being used in a wide variety of applications including:
• everyday activity loggers• remote region monitoring• gait analysis systems
Such systems are part of a new class of sensor-driven applications, leveraging the decrease in both price and size of the components to allow rich, multimodal data streams to be captured by very compact systems.
However, most sensing applications are constrained to short lifespans by high power usage and limited battery size. For example, in the case of activity monitoring and logging:
• fixed environmental sensors cannot follow an active patient• body-worn sensors require large battery packs
By concentrating our design efforts on the sensors themselves, it is possible to construct embedded systems that achieve their goal(s) while drawing significantly less power. This will increase their lifespan, allowing many more applications to make the transition from laboratory to marketplace and thereby benefit a much wider population.
AnalysisAnalysisFor testing, a data stream containing a wide variety of different ambulatory activities was collected, using a shoe mounted node containing:
Three axes of gyroscopes Three axes of accelerometers Four-way passive tilt switch
The set of activities chosen was:
Walking uphill and downhill Ascending and descending stairs Normal and shuffling gait
This data set allows us to create classifiers which separate a single complex ambulatory activity from the other five. Such a system would be valuable for Pakinson’s Disease patients, where a doctor would be most interested in collecting information about the frequency and parameters of the patient's shuffling episodes. For patients with total knee replacement, activities such as ascending stairs are the most important to measure. Such cases allow for far more complex and richer classifiers than those used to simply separate ambulatory from motionless states.
Each classifier was both simulated on the continuous stream set aside for this purpose and also tested in real-time.
There were two primary concerns to test:
•The effect of the activation latency and whether it will lead to missed detections
•Whether the classifier overtrained to the sample set
The left-hand column of plots shows the ground truth of the user annotation and four different interpretations of the operation of the classifier for stair descent. The first is the state output of the static classifier for which all of the sensors are always on. The real-time classifier cannot respond more quickly. The second shows the state output for the real-time classifier. The third is the number of sensors active at any given point. The last shows the power consumption of the active and awakening sensors. Just as the state output of the real-time classifier is a subset of the state output of the static classifier, it is also a subset of the activation level, which is a subset of the power usage. The right-hand column shows the same information, this time collected from the system running in real time.
Overall, the tests of the real-time operation of the classifiers demonstrated that our multi-tiered classifier determines states as accurately as a binary wakeup system while drawing half as much power, with only a negligible increase in latency.
Classifiers were constructed for each of the six cases of one motion being the positive class and the others being grouped together as the negative class. A population of decision trees for various value of the weighting parameter were built. Support vector machines (SVM) were trained – one for each combination of sensors – for the same tasks as above to act as a point of comparison. The power/accuracy curves for these classifiers is shown above. It was shown that, in general, the decision tree classifiers designed achieve roughly identical detection accuracies to those obtained using support vector machines while drawing three times less power.The tree below is for the case of detecting stair descent. Note that the least expensive sensor is at the top of the tree, and that the gyroscopes are not used.