Embed Size (px)
Citation preview

1
Applying Principles from the Locomotion of Small Animals to the Design and Operation of Robots
Mark Cutkosky Center for Design Research
Stanford University Stanford, CA
bdml.stanford.edu

Stryker Interaction Design Workshop September 7-8, 2005
2 1/28/13
Origins of bio-inspired design
• Understanding the body as a marvelous machine
• Understanding machine elements as examples of limbs, skeletons, muscles and tendons
Renaissance discovery:
Da Vinci notebooks
Da Vinci’s programmable spring-powered cart

Stryker Interaction Design Workshop September 7-8, 2005
3 1/28/13
Why the recent proliferation of biomimetic designs?

Stryker Interaction Design Workshop September 7-8, 2005
4 1/28/13
Spatular shaft
2!m
Spatula
200nm
Setal shaft
100!m
Lamella
Cushions 1cm
1mm
Biology: better tools for understanding biological systems in detail

Stryker Interaction Design Workshop September 7-8, 2005
5 1/28/13
380µm Deposit (part)
Shape
Embed Deposit (support)
Shape
Part Embedded Component
Support
Engineering: better analysis tools, fabrication methods and materials
Synthetic dry adhesive: polymer molds from dual,
angled-exposure lithography + micromachining
SDM multi-material fabrication

Stryker Interaction Design Workshop September 7-8, 2005
Behaviors now: discrete, isolated
Stryker Interaction Design Workshop September 7-8, 2005
7 1/28/13
Biomimetics
Copy Nature
Evolution - “just good enough”
Natural Selection is
not Engineering
R.J. Full Dept. of
Integrative Biology, UC Berkeley

Lessons from biology for bio-inspired design:
1. Reduce Complexity - Collapse Dimensions
2. Manage Energy 3. Use Multifunctional Materials - Tuned,
Integrated & Robust
4. Exploit Interaction with Environment
R.J. Full

“Curse of Dimensionality”
Designs appear hopelessly complex No detailed history of design plans
230 Muscles
Full and Ahn, 1995
? Neurons 72 DOF
R.J. Full

Stryker Interaction Design Workshop September 7-8, 2005
Reducing dimensionality: the sagittal leg spring
Human
TWO- Legged
Cockroach
Legged SIX-
Crab
Legged EIGHT-
Dog
Legged FOUR-
B o d y W e i g h t
Cavagna et al., 1977
Full and Tu, 1990 Blickhan and Full, 1987
R.J. Full
vertical force
fore-aft force time

Stryker Interaction Design Workshop September 7-8, 2005
11 1/28/13
Lessons from Biology
1. Reduce Complexity - Collapse Dimensions
2. Manage Energy 3. Use Multifunctional Materials - Tuned,
Integrated & Robust
4. Effective Interaction with Environment

Stryker Interaction Design Workshop September 7-8, 2005
12 1/28/13
Deposit (part)
Shape
Embed Deposit (support)
Shape
Part
Embedded Component
Support
Shape Deposition Manufacturing (SU/CMU)

Stryker Interaction Design Workshop September 7-8, 2005
13 1/28/13
Leaf-spring
Piston
Sensor and circuit
spacer
Valves
1. Support material 2. Part material 3. Embedded sensor 4. Part material 5. Embedded parts 6. Part material 7. Top support*
Detail of part just after inserting embedded components
Robot leg with embedded actuator, valves, sensor and circuitry
Finished parts Sequence of geometries for fabrication
Embedded components
[Cham et al. 1999]
Stryker Interaction Design Workshop September 7-8, 2005
14 1/28/13
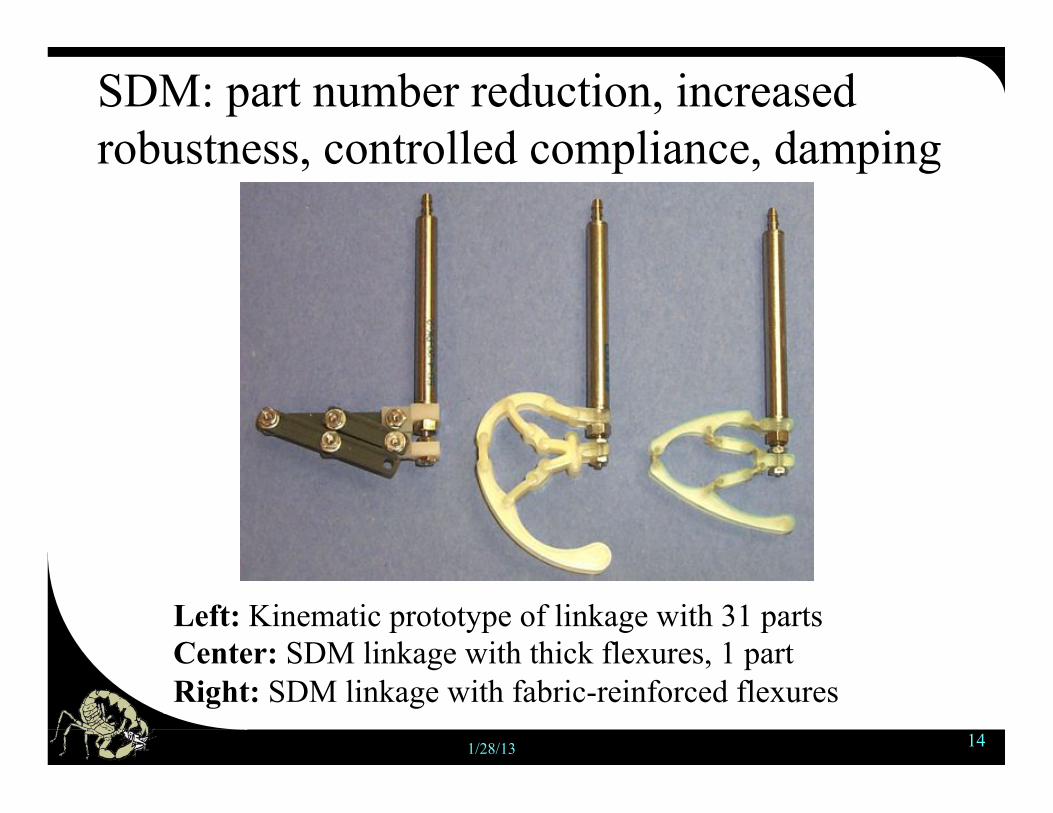
SDM: part number reduction, increased robustness, controlled compliance, damping
Left: Kinematic prototype of linkage with 31 parts Center: SDM linkage with thick flexures, 1 part Right: SDM linkage with fabric-reinforced flexures

Stryker Interaction Design Workshop September 7-8, 2005
15 1/28/13
Biological Inspiration
• Control heirarchy – Passive component – Active component
Full and Koditschek, 1999
Mechanical System
(muscles, limbs)
Environment
Mechanical Feedback (Preflexes)
Sensory Feedback (Reflexes)
Neural System (CPG)
Feedforward Motor Pattern
Passive Dynamic Self-Stabilization
Locomotion

Stryker Interaction Design Workshop September 7-8, 2005
16 1/28/13
Solution Approach: Analyze and “Optimize” Dynamic Model in ADAMS
3D model with geometric similarity to robot - Rigid body with six legs - Linear pneumatic actuators (with valve delays) - Spring-damper rotational joints in sagittal plane - Friction and ground contact models

Stryker Interaction Design Workshop September 7-8, 2005
17 1/28/13
Study biological materials, components, and their roles in locomotion.
Study Shape Deposition Manufacturing (SDM) materials and components.
Models of material behavior and design rules for creating!SDM structures with desired properties!
Example: mapping from passive mechanical properties of insects to biomimetic robot structures
ServoMotor
Roachleg
Displacement InputForce Output
stiff material!
viscoelastic material!

Stryker Interaction Design Workshop September 7-8, 2005
18 1/28/13
ServoMotor
Roachleg
Displacement InputForce Output
Study biological materials, components, and their roles in locomotion.
Study Shape Deposition Manufacturing (SDM) materials and components.
Models of material behavior and design rules for creating!SDM structures with desired properties!
Hysteresis loop @10Hz!
Example: mapping from passive mechanical properties of insects to biomimetic robot structures
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 -6
-4
-2
0
2
4
6
position (mm)
Forc
e (m
N)
Data Model

Stryker Interaction Design Workshop September 7-8, 2005
19 1/28/13
Bioinspiration how do they
do it?
Biology examine literature, work with biologists
Robotics implementations of principles
SDM technology
2. Bioinspiration for smooth climbing
Analysis test and analyze results
refinement
FT
FN
Hypotheses regarding the
principles at work

Stryker Interaction Design Workshop September 7-8, 2005
20 1/28/13
Principles for climbing with dry adhesion
2. Directional adhesives
1. Hierarchical compliance
3. Distributed force control

Stryker Interaction Design Workshop September 7-8, 2005
21 1/28/13
Compliant peeling toe
Living hinge
Hard polyurethane
Soft poly-urethane
Fiber mesh embedded
Tendon (steel cable)
Teflon tube
Directional Polymeric Stalks

Stryker Interaction Design Workshop September 7-8, 2005
22 1/28/13
Anisotropic gecko adhesion
25 mN of Adhesion
Gecko setae dragging with curvature
-30
-20
-10
0
10
20
30
40
50
0 1 2 3 4
Time (s)
Forc
e (m
N)
Colored: Normal force Gray: Shear force
Dragging against curvature
No Adhesion
Time (s)
Forc
e (m
N)
-30
-20
-10
0
10
20
30
40
50
0 1 2 3 4
Stryker Interaction Design Workshop September 7-8, 2005
23 1/28/13
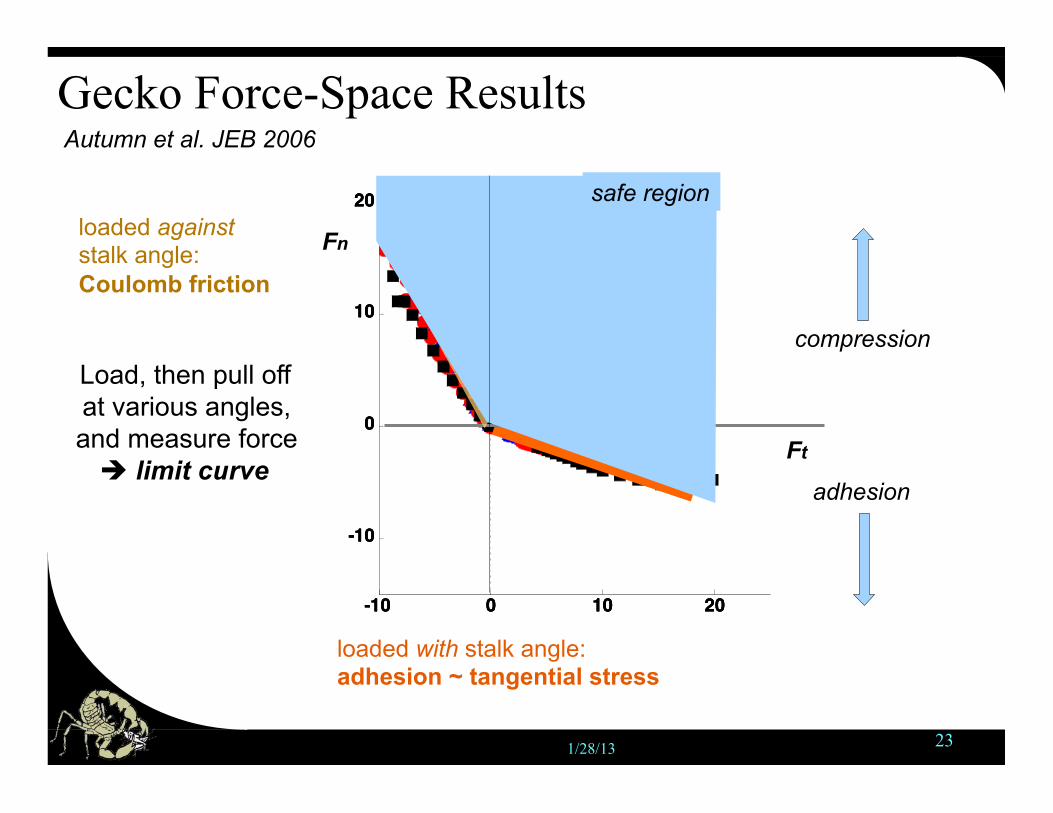
Gecko Force-Space Results
Load, then pull off at various angles, and measure force ! limit curve
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm600µm
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm600µm700µm
loaded with stalk angle: adhesion ~ tangential stress
loaded against stalk angle: Coulomb friction
safe region
Autumn et al. JEB 2006
Fn
Ft
compression
adhesion
Stryker Interaction Design Workshop September 7-8, 2005
24 1/28/13
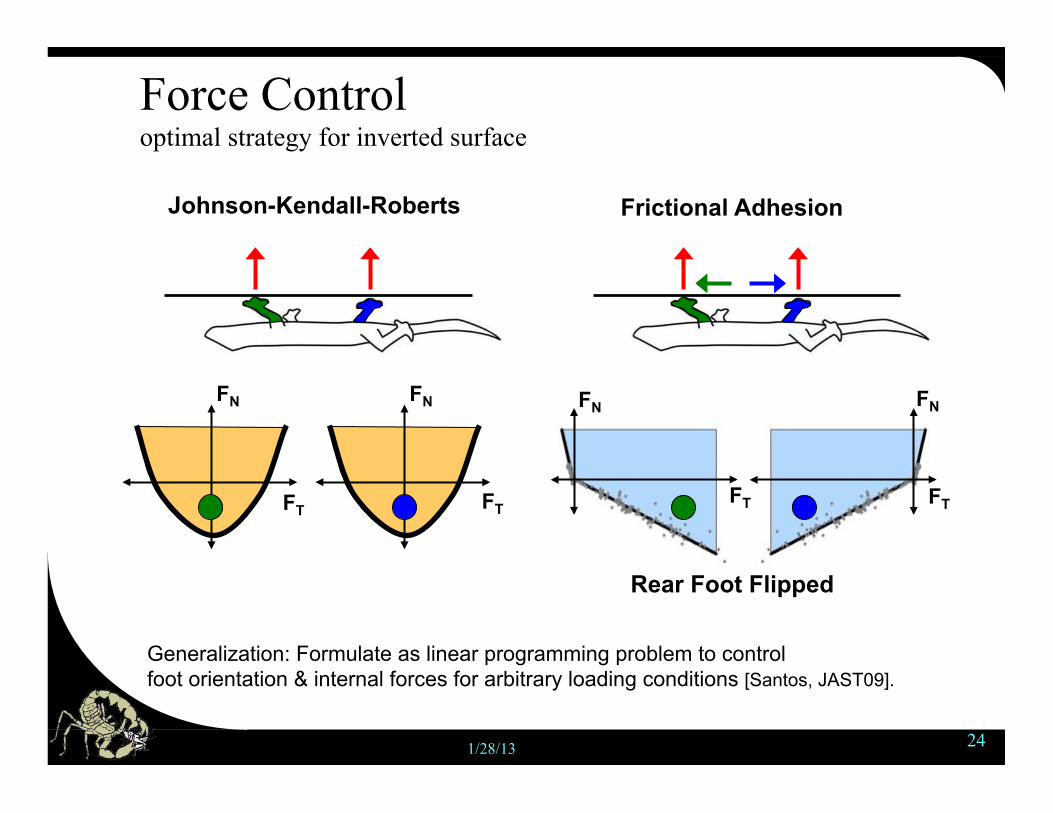
Force Control optimal strategy for inverted surface
Frictional Adhesion Johnson-Kendall-Roberts
Rear Foot Flipped
FN
FT
FN FN FN
FT FT FT
Generalization: Formulate as linear programming problem to control foot orientation & internal forces for arbitrary loading conditions [Santos, JAST09].

Stryker Interaction Design Workshop September 7-8, 2005
25 1/28/13
Control foot orientation + internal forces
Stryker Interaction Design Workshop September 7-8, 2005
26 1/28/13
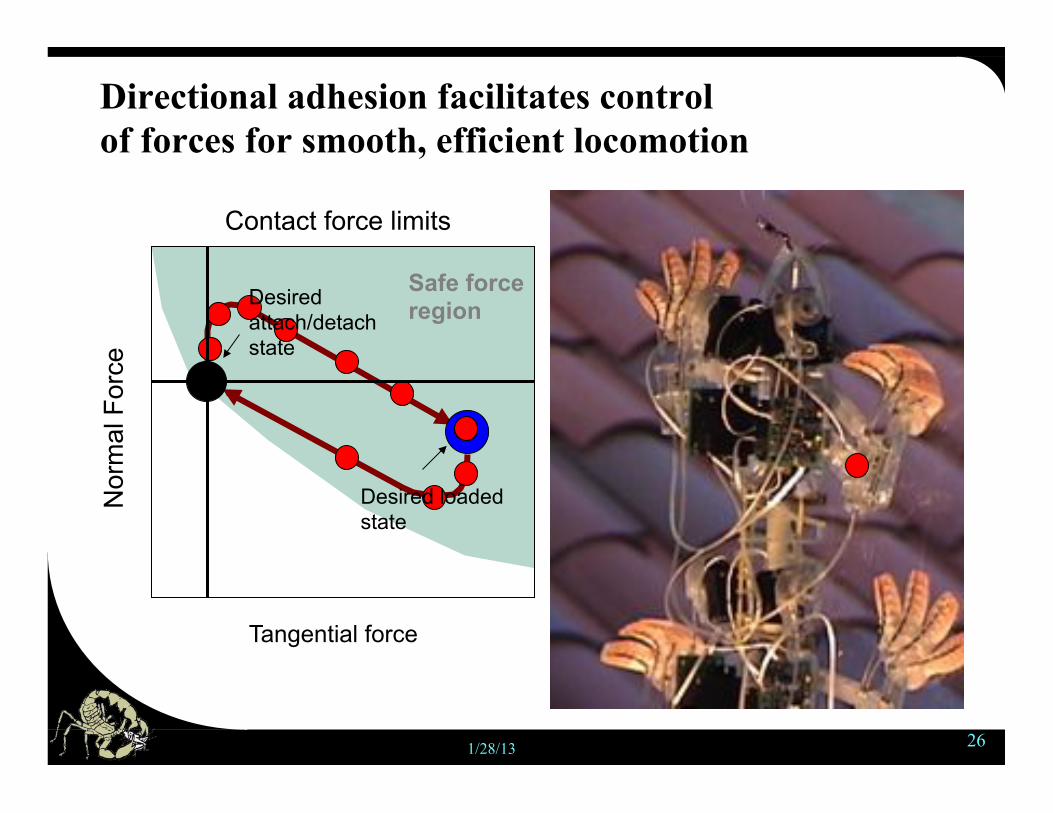
Directional adhesion facilitates control of forces for smooth, efficient locomotion
Tangential force
Nor
mal
For
ce
Contact force limits
Safe force region
Desired loaded state
Desired attach/detach state

The gecko’s hierarchical adhesive system spans length scales from 1 cm to 100 nm.
Current work: compliant hierarchical structures
380µm
Synthetic adhesives require hierarchical, directional compliance to conform to rough surfaces and distribute loads over large areas.
20 µm wedges atop 380 µm directional stalks (SEM photo)

Stryker Interaction Design Workshop September 7-8, 2005
28 1/28/13
Stanford hierarchical, directional adhesive !"#$%&'()*+,'*-.$#+/0)*12+3!,/4+
!,/+
5"%#'6$78$2+
9"$#)#%:"%)*+/-20$.+
;<+

Stryker Interaction Design Workshop September 7-8, 2005
29 1/28/13
Bio-Inspired?

Stryker Interaction Design Workshop September 7-8, 2005
How to get nearly uniform loading over the entire toe, with tolerance to a range of loading angles?
Lamella
Bio-Inspiration
Phalanges
Lamellae
Fluid-filled sac
Lateral digital tendon
Lateral digital tendon
(Russell J. Morphology 1982)

Stryker Interaction Design Workshop September 7-8, 2005 31
Loading angles: alignment compensation
4 leg version of RiSE platform
4 kg gross loads

Stryker Interaction Design Workshop September 7-8, 2005
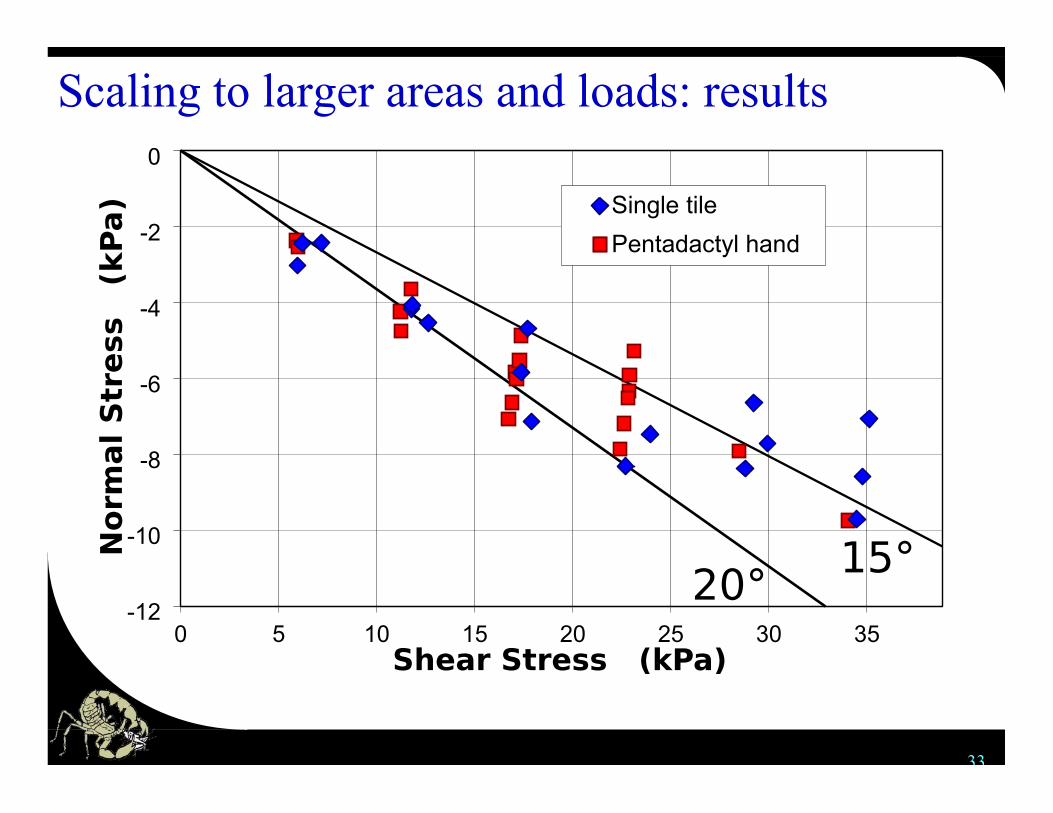
Scaling to larger areas and loads: tiled arrays
adhesive
rigid tile
pressurized
sac
pressure
plate
main tendontile tendon
compliant
supportstructure
pulley
40 kg
Approx. 80cm2
Stryker Interaction Design Workshop September 7-8, 2005 33
Scaling to larger areas and loads: results

Stryker Interaction Design Workshop September 7-8, 2005
This work has been supported by the RiSE program (DARPA BioDynotics N66001-03-C-8045) with additional support from NSF NIRT (ID 0708367) and COINS (UCB)
Robots in Scansorial Environments (RiSE)
Acknowledgements

















![Locomotion [2014]](https://img.pdfslide.us/doc/110x75/5564e3eed8b42ad3488b4e94/locomotion-2014.jpg)










