Upload
omkar-bhutara
View
243
Download
4
Tags:
Embed Size (px)
DESCRIPTION
Engineering physics notes.
Citation preview
UNIT 1
UNIT 1. - ELASTICITY
Introduction:
A rigid body can be defined as one which does not undergo any deformation when external forces act on it. When forces are applied on a rigid body the distance between any two particles of the body will remain unchanged however large the force may be. In actual practice no body is perfectly rigid. For practical purposes solid bodies are taken as rigid bodies. When external force acts on it bring about a change in its Length, volume or shape. Such forces are called deforming force. What happens to the body when these forces are removed? The external forces acting on the body compel the molecules to change their position. Due to these relative molecular displacements, internal forces are developed within the body that tends to oppose the external deforming force. When the deforming forces are removed, the internal forces will tend to regain the shape and size of the body.
How does one account for this? Under the action of the external force, the body changes its form because; the molecules inside it are displaced from their previous positions. While they are displaced, the molecules develop a tendency to come back to their original positions, because of intermolecular binding forces. The aggregate of the restoration tendency exhibited by all the molecules of the body manifests as a balancing force or restoring force counteracting the external force.
Elasticity is the property by virtue of which material bodies regain their original shape and size after the deforming forces are removed.
When this external force is removed, the body regains its original shape and size. Such bodies are called elastic bodies. Example: steel, glass, ivory, quartzetc are elastic bodies. The bodies which do not regain their original shape and size are called plastic bodies. No body is either completely elastic or completely plastic. The property of elasticity is different in different substances. Steel is more elastic than rubber. Liquids and gases are highly elastic.
STRESS AND STRAIN LOAD: It implies the combination of external forces acting on a body and its effect is to change the form or the dimensions of the body.
STRESS: Restoring force per unit area developed inside the body is called stress. Since the magnitude of the restoring force is exactly equal to that of the applied force, stress is given by the ratio of the applied force to the area of its application.
Normal stress: Restoring force per unit area perpendicular to the surface is called normal stress.
Tangential stress: Restoring force parallel to the surface per unit area is called tangential stress.STRAIN: The change in the form of the body i.e., the deformation produced by the external force, accompanies a change in dimensions.
The ratio of change in dimensions to the original dimensions is called strain. But the way in which the change in dimensions is produced depends upon the form of the body and the manner in which the force is applied.Deformation is of three types, resulting in three types of strains, defined as follows:
i) Linear strain or Tensile strain: If the shape of the body could be approximated to the form of a long wire and if a force is applied at one end along its length keeping the other end fixed, the wire undergoes a change in length.
If x is the change in length produced for an original length L then,
Linear strain =
=ii) Volume strain: If a uniform force is applied all over the surface of a body, the body undergoes a change in its volume (however the shape is retained in case of solid bodies). If v is the change in volume to an original volume V of the body then,
Volume strain ==
iii) Shear strain: If a force is applied tangentially to a free portion of the body, another part being fixed, its layers slide one over the other; the body experiences a turning effect and changes its shape. This is called shearing and the angle through which the turning takes place is called shearing angle ().
HOOKES LAW
It states that stress is proportional to strain (provided strain is small), so that in such a case the ratio of stress to strain is a constant, called the modulus of elasticity or coefficient of elasticity.
i.e., stress strain,
Or,
STRESS - STRAIN RELATIONSHIP IN A WIRE
When the stress is continually increased in the case of a solid, a point is reached at which the strain increases rapidly. The stress at which the linear relationship between stress and strain ceases to hold good is referred to as the elastic limit of the material. Thus, if the material happens to be in the form of a bar or a wire under stretch, it will recover its original length on the removal of the stress so long as the stress is below the elastic limit, but if this limit is exceeded, it will fail to do so and will acquire what is called as permanent set.
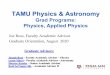
The relationship between stress and strain is studied by plotting a graph for various values of stress and the accompanying strain. This is known as stress-strain diagram.
The straight and sloping part OA of the curve clearly shows that the strain produced is directly proportional to the stress applied or the Hooks law is obeyed perfectly up to A and that, therefore, on the removal of the stress, it will recover its original condition of zero strain, represented by O.
As soon as the elastic limit is crossed, the strain increases more rapidly than the stress, and the graph curves along AB, the extension of the wire now being partly elastic and partly plastic. Hence, on being unloaded here, say, at the point B, it does not come back to its original condition along AO, but takes the dotted path BC, so that there remains a residual strain OC in it, which is permanent set acquired by the wire.
Beyond the point B, for practically little or no increase in stress(or the load applied) there is a large increase in strain (i.e., in the extension produced) up to D, so that the portion BD of the graph is an irregular wavy line, the stress corresponding to D being less than that corresponding to B. This point B where the large increase in strain commences is called the yield point, the stress corresponding to it being known as the yielding stress.
The yielding ceases at D and on further extension, it becomes plastic, which can only be produced by gradually increasing the load so that the portion DF of the graph is obtained. The cross sectional area is called the ultimate strength or the tensile strength of the wire and is also sometimes termed the breaking stress.
The extension of the wire goes on increasing beyond F without any addition to the load, even if the load is reduced a little, and wire behaves as though it were literally flowing down. This is because of a faster rate of decrease of its cross-sectional area at some section of its length where local constriction, called a neck begins to develop, with the result that, even if the load be not increased, the load per unit area or the stress becomes considerably greater there, bringing about corresponding increase in strain or extension in the wire. The load is there, decreased, i.e., the stress reduced at this stage and the wire finally snaps or breaks at E, which thus represents the breaking point for it.Corresponding to the three types of strain, we have three types of elasticity:
a) Linear Elasticity or Elasticity of length called Youngs modulus, corresponding to linear or tensile strain:
When the deforming force is applied to the body only along a particular direction, the change per unit length in that direction is called longitudinal, linear or elongation strain, and the force applied per unit area of cross section is called longitudinal or linear stress. The ratio of longitudinal stress to linear strain within elastic limit is called the coefficient of direct elasticity or Youngs modulus and is denoted by Y or E. If F is the force applied normally, to a cross-sectional area a, then the stress is F/a. If L is original length and x is change in length due to the applied force, the strain is given by x/L,
so that, Y = = N/m2b) Elasticity of volume or Bulk modulus:
When the deforming force is applied normally and uniformly to the entire surface of a body, it produces a volume strain (without changing its shape in case of solid bodies). The applied force per unit area gives the normal stress or pressure. The ratio of normal stress or pressure to the volume strain without change in shape of the body within the elastic limits is called Bulk modulus.
If F is the force applied uniformly and normally on a surface area (a) the stress or pressure is F/a or P and if v is the change in volume produced in an original volume V, the strain is given by v/V and therefore
K = N/m2 Bulk modulus is referred to as incompressibility and hence its reciprocal is called compressibility (strain per unit stress).
c) Modulus of Rigidity (corresponding to shear strain) :
In this case, while there is a change in the shape of the body, there is no change in its volume. It takes place by the movement of contiguous layers of the body, one over the other. There is a change in the inclinations of the co-ordinates axes of the system or the body.
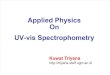
Consider a rectangular solid cube whose lower face DCRS is fixed, and to whose upper face a tangential force F is applied in the direction as shown. Under the action of this force, the layers of the cube which are parallel to the applied force slide one over the other such that point A shifts to A1, B to B1, P to P1 and Q to Q1 that is the planes of the two faces ABCD and PQRS can be said to have turned through an angle (. This angle ( is called the angle of shear or shearing strain. Tangential stress is equal to the force F divided by area a of the face APQB.
Hence tangential stress = = PP1 / PS =
The rigidity modulus is defined as the ratio of the tangential stress to the shearing strain.
Rigidity modulus = = N/m2Poissons Ratio (():
In case of any deformation taking place along the length of a body like a wire, due to a deforming force, there is always some change in the thickness of the body. This change which occurs in a direction perpendicular to the direction along which the deforming force is acting is called lateral change.
Within elastic limits of a body, the ratio of lateral strain to the longitudinal strain is a constant and is called Poissons ratio.If a deforming force acting on a wire of length L produces a change in length x accompanied by a change in diameter of d in it which has a original diameter of D, then lateral strain (=and Longitudinal strain =,
Poissons ratio, = =
There are no units for Poissons ratio. It is a dimensionless quantity.
RELATION BETWEEN THE THREE MODULI OF ELASTICITY:
When body undergoes an elastic deformation, it is studied under any of the three elastic moduli depending upon the type of deformation. However these moduli are related to each other. Now, their relation can be understood by knowing how one type of deformation could be equated to combination of other types of deformation.
EQUIVALENCE OF SHEAR TO COMPRESSION AND EXTENSION:
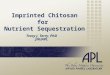
Consider a cube whose lower surface CD is fixed to a rigid support. Let ABCD be its front face. If a tangential force F is applied at the upper surface along AB, it causes relative displacements at different parts of the cube, so that A moves to A1 and B moves to B1 through a small angle. In this way the diagonal AC will be shortened to A1C and diagonal DB will be increased in length to DB1. Let be the angle of shear which is very small in magnitude.
Let length of each side of the cube = L.
AA1=BB1= l.
As is small, = tan = l / L.
As diagonal DB increases to DB1and diagonal AC is compressed to A1C,
we have Extension strain along DB = NB1/DB
Compression strain along AC=MA/CA
If L is the length of each side of the cube, then, AC = DB=L (By Pythagoras theorem).
Now, NB1=BB1cos45= and AM=AA1 cos45=
Elongation strain along DB = NB1/DB=
And compression strain along AC = MA1/CA=
From the above two relation it is clear that a simple shear is equivalent to an extension strain and compression strain at right angles to each other and each of value /2.
The converse is also true i.e., simultaneous equal compression and extension at right angles to each other are equivalent to shear.
Elongation strain + compression strain =, the shearing strain.
EQUIVALENCE OF SHEARING STRESS TO A COMPRESSIVE STRESS AND A TENSILE STRESS:
Compressive stress (or compression) is the stress state caused by an applied load that acts to reduce the length of the material in the axis of the applied load.
Tensile stress is the stress state caused by an applied load that tends to elongate the material in the axis of the applied load, in other words the stress caused by pulling the material.
Consider a section of cube ABCD having O as centre and whose lower face CD is clamped and let a tangential force F being applied on the upper face AB in the direction shown by arrow. If L is the length of each side of the cube, then tangential force per unit area will be F/l2 = T. The face CD experiences equal and opposite forces and these two forces acting along the face AB and CD form a couple which has a tendency to rotate the cube in the clockwise direction. As the cube is unable to rotate, a couple is called in to action which counter balances the applied couple and this couple is called restoring couple.
The restoring couple consists of forces acting tangentially on the faces CB and AD and each of magnitude F. Under the action of these four forces (along AB, CD, BC and AD) each of F the cube is deformed. As these four forces are in equilibrium the cube does not move. The force acting along AB can be resolved along AO and OB i.e., into two equal components of magnitude f. Similarly the remaining three forces can be resolved into three pairs of components each of f. Thus we have four forces of value F all acting tangentially on the faces of the cube which are resolved into four forces each of value f acting along the diagonals as shown in the figure. The force f acting along AC tends to compress the diagonal and those acting along DB tend to produce extension along that diagonal.
Therefore the area of the triangular face ABC cut parallel to AC and perpendicular to the plane of the paper. = DB x AO = Lx L= L2.
As DB = = = L.
Since the force acting on either side of the section normal to it is 2f. Therefore compressive stress along AC ==
But f = F cos45=
Compressive stress along AC = = = T = Tangential stress---------------- (1) Similarly tensile stress along BD == = T = Tangential stress---------------- (2) From (1) and (2) it is clear that a shearing stress is equivalent to an equal linear tensile stress and an equal linear compressive stress at right angles to each other.
RELATION BETWEEN Y AND Consider a cube of unit side subjected to unit tension along one side. Let be the elongation per unit length per unit tension along the direction of the force. Therefore,
Stress = = 1
Similarly, linear strain = = =
Y = =
RELATION BETWEEN K, AND Consider a cube ABCDEFGH of unit volume, as shown in the diagram. Let Tx be the stress acting on the faces ABEF and CDGH. Let Ty be the stress which acts perpendicular to the faces ABCD and EFGH. Similarly, Tz is acting perpendicularly between faces ACEG and BDFH.
Ty Tz
Tx Tx
Tz TyEach stress produces an extension in its own direction and a lateral contraction in the other two perpendicular directions. Let be the elongation per unit length per unit stress along the direction of the forces and be the contraction per unit length per unit stress in a direction perpendicular to the respective forces. Then stress like Tx produces an increase in length of
Tx in X-direction: but since other two stresses Ty and Tz are perpendicular to X-direction they produce a contraction of Ty and Tz respectively in the cube along X-direction .Hence, a length which was unity along X-direction becomes ,
1+ Tx - Ty - Tz.
Similarly along Y and Z directions the respective length become, 1+ Ty - Tz - Tx. 1+ Tz - Tx - Ty.
Hence the new volume of the cube is
= (1+ Tx - Ty - Tz) (1+ Ty - Tz - Tx) (1+ Tz - Tx - Ty)
Since and are very small, the terms which contain either powers of and , or their products can be neglected.
New volume of the cube = 1 + (Tx+ Ty+ Tz)- 2(Tx+ Ty+ Tz),
= 1+ (-2)(Tx+ Ty+ Tz)
If Tx= Ty= Tz= T
Then the new volume =1+ (-2) 3T
Since the cube under consideration is of unit volume, increase in volume = [1+3T (-2)]-1
= 3T (-2)
If instead of outward stress T, a pressure P is applied, the decrease in volume = 3P (-2).
Volume strain ==
K =
RELATION BETWEEN Y, K, AND
K = (and Y =
RELATION BETWEEN AND
Consider a cube with each of its sides of length L under the action of tangential stress T. let tangential force F be applied to its upper face. It causes the plane of the faces perpendicular to the applied force F turn through an angle . as a result diagonal AC undergoes contraction and diagonal DB1undergoes elongation of equal amount.
Now, shearing strain occurring along AB can be treated as equivalent to a longitudinal strain, along AB1 and an equal lateral strain along the diagonal A1C i.e., perpendicular to DB. Let and be the longitudinal and lateral strains per unit length per unit stress which is applied along AB , since T is the applied stress, extension produced for the length DB due to tensile stress = T. DB. and extension produced for the length DB due to compression stress = T.DB..
Total extension along DB = DB.T.(+),
It is clear that the total extension in DB is approximately equal to B1N when BN is perpendicular to DB1.
B1N= DB.T(+),
B1N=().T(+), (DB cos45=L)
Now,
=45 and since is always very small,
ABD ,
B1N = BB1cos45 = ()
Or,
Or,
RELATION BETWEEN Y, K and
We know that and K
Rearranging which we get,
and =1-2
Adding the above we get, ,
Or
Relation between K , and
We have the relations Y = 2(1 + ), and Y = 3K (1-2)
Equating the above equations we get,
2 + 2 = 3K 6K,
2 + 6K = 3K - 2,
Or , (2 + 6K) = 3K - 2,
Or, =
Torsion of a cylinder
A long body which is twisted around its length as an axis is said to be under torsion. The twisting is brought into effect by fixing one end of the body to a rigid support and applying a suitable couple at the other end. The elasticity of a solid, long uniform cylindrical body under torsion can be studied, by imagining it to be consisting of concentric layers of the material of which it is made up of. The applied twisting couple is calculated in terms of the rigidity modulus of the body.
Expression for the Torsion of a cylindrical rod:
Consider a long cylindrical rod of length L and radius R rigidly fixed at its upper end. Let OO' be its axis. Imagine the cylindrical rod is made up of thin concentric hollow cylindrical layers each of thickness dr.
The rod twisted at its lower end, and then the concentric layers slide one over the other. This movement will be zero at the fixed end and gradually increased along the downward direction. Let us consider one concentric circular layer of radius r and thickness dr . Any point X on its uppermost part would remain fixed and a point like B at its bottom moves to B'. Now the gives the angle of shear. Since ( is also small, the movement length . Also, if , the length B B' = r.
Now, the cross sectional area of the layer under consideration is 2(r dr . If F is the shearing force, then the shearing stress T is given by
(Shearing force F = T(2(rdr)
( Rigidity modulus n = Shearing stress/shearing strain.
The moment of the force about
This is only for the one layer of the cylinder.
Therefore, twisting couple acting on the entire cylinder
Couple per unit twist is given by C=Total twisting couple / angle of twist.
Torsional PendulumTorsional pendulum consists of a heavy metal disc is suspended by means of a wire. When the disc is rotated in a horizontal plane so as to twist the wire, the various elements of the wire undergo shearing strain. The restoring couple of the wire tries to bring the wire back to the original position. Therefore disc executes torsional oscillations about the mean position.
Let be the angle of twist made by the wire and C be the couple per unit twist.
Then the restoring couple per unit twist = C.
Therefore the angular acceleration produced by the restoring couple in the wire. a =
Let I be the moment of inertia of the wire about the axis. Therefore, we have, I= -C
The above relation shows that the angular acceleration is proportional to angular displacement and is always directed towards the mean position. The negative sign indicates that the couple tends to decrease the twist on the wire. Therefore, the motion of the disc is always simple harmonic motion (SHM).
Therefore, the time period of oscillator is given by relation,
Uses of torsion pendulum:
(i) For determination of moment of inertia of an irregular body:For determining the moment of inertia of an irregular body the torsion pendulum is
Found to be very useful. First, the time period of the pendulum is determined
when it is empty and then the time period of the pendulum is determined after fixing a regular body at the free end. After this the time period is determined by replacing
the regular body by the irregular body whose moment of inertia is to be determined.
If I, I1 and I2 are the moments of inertia of the pendulum, regular body and irregular body respectively and T, T1 and T2 are the time periods in the three cases respectively, then
T=2 . . . . . . . (1) T1=2 . . . . . . . . . .(2)
T2=2 . . . . .. . . .. . (3)
From relations (2) and (1), we have
T12-T2=
And from (2) and (3), we have T22- T2=Bending of beams:
A homogenous body of uniform cross section whose length is large compared to its other dimensions is called a beam.
Neutral surface and neutral axis:
Consider a uniform beam MN whose one end id fixed at M. The beam can be thought of as made up of a number of parallel layers and each layer in turn can be thought of as made up of a number of infinitesimally thin straight parallel longitudinal filaments or fibres arranged one closely next to the other in the plane of the layer. If a cross section of the beam along its length and perpendicular to these layers is taken the filaments of different layers appear like straight lines piled one above the other along the length of the beam. For a given layer, all its constituent filaments are assumed to undergo identical changes when that layer is strained.
If a load is attached to the free end of the beam, the beam bends. The successive layers along with constituent filaments are strained. A filament like AB of an upper layer will be elongated to A1B1 and the one like EF of a lower layer will be contracted to E1F1. But there will always be a particular layer whose filaments do not change their length as shown for CD. Such a layer is called neutral surface and the line along which a filament of it is situated is called neutral axis.
The filaments of a neutral surface could be taken as line along which the surface is intercepted by a cross section of the beam considered in the plane of bending as shown.
Neutral Surface: It is that layer of a uniform beam which does not undergo any change in its dimensions, when the beam is subjected to bending within its elastic limit.
Neutral axis: It is a longitudinal line along which neutral surface is intercepted by any longitudinal plane considered in the plane of bending.
When a uniform beam is bent, all its layers which are above the neutral surface undergo elongation whereas those below the neutral surface are subjected to compression. As a result the forces of reaction are called into play in the body of the beam which develop an inward pull towards the fixed end for all the layers above the neutral surface and an outward push directed away from the fixed end for all layer below the neutral surface. These two groups of forces result in a restoring couple which balances the applied couple acting on the beam. The moment of restoring couple is called restoring moment and the moment of the applied couple is called the bending moment. When the beam is in equilibrium, the bending moment and the restoring moments are equal.
Bending moment of a beam:
Consider a uniform beam whose one end is fixed at M. If now a load is attached to the beam, the beam bends. The successive layers are now strained. A layer like AB which is above the neutral surface will be elongated to A1B1 and the one like EF below neutral surface will be contracted to E1F1. CD is neutral surface which does not change its length.
The shape of each layers of the beam can be imagined to form part of concentric circles of varying radii. Let R be the radius of the circle to which the neutral surface forms a part.
(CD=R(where ( is the common angle subtended by the layers at common center O of the circles. The layer AB has been elongated to A1B1.
( change in length =A1B1-AB
But AB=CD=R(If the successive layers are separated by a distance r then,
A1B1=(R+r)((Change in length=(R+r)(-R( = r(But original length = AB=R( (Linear strain =
Youngs Modulus Y= Longitudinal stress/linear strain
Longitudinal stress = Yx Linear strain
= Yx
But stress =
Where F is the force acting on the beam and a is the area of the layer AB.
Moment of this force about the neutral axis=F x its distance from neutral axis.
= F x r = Yar2 /R
Moment of force acting on the entire beam =
=
The moment of inertia of a body about a given axis is given by mr2, where m is the mass of the body. Similarly ar2 is called the geometric moment of Inertia Ig.
Ig=ar2 =Ak2 , where A is the area of cross section of the beam and k is the radius of gyration about the neutral axis.
Moment of force =
Bending moment =
Single Cantilever
If one end of beam is fixed to a rigid support and its other end loaded, then the arrangement is called single cantilever or cantilever.
Consider a uniform beam of length L fixed at M. Let a load W act on the beam at N.
Consider a point on the free beam at a distance x from the fixed end which will be at a distance (L-x) from N. Let P1 be its position after the beam is bent.
(Bending moment = Force x Perpendicular distance.
= W(L-x)
But bending moment of a beam is given by
= W(L-x) ----------------(1)
------------------(2)
But if y is the depression of the point P then it can be shown that
---------------------(3)
where R is the radius of circle to which the bent beam becomes a part.
Comparing equations 2 and 3
Integrating both sides
---------------(4)
C is constant of integration
But dy/dx is the slope of the tangent drawn to the bent beam at a distance x from the fixed end. When x=0, it refers to the tangent drawn at M, where it is horizontal. Hence (dy/dx)=0 at x=0. Introducing this condition in equation (4 )we get 0=C1 Equation 4 becomes
Integrating both sides we get
-----------------(5)
where C2 is constant of integration, y is the depression produced at known distance from the fixed end. Therefore when x=0, it refers to the depression at M, where there is obviously no depression. Hence y=0 at x=0. Introducing this condition in equation 5 we get
At the loaded end, y=y0 and x=L
Therefore
Depression produced at loaded end is
Therefore the youngs modulus of the material of the cantilever is
-----------------(6)
Case (a):
If the beam is having rectangular cross-section, with breadth b and thickness d then,
Ig = -----------------(7)
Substituting equation (7) in equation (6) we get
Case(b):
If the beam is having a circular cross section of radius r then,
---------------------(8)
Substituting equation (8) in equation (7) we get
Experiment to determine youngs modulus by single cantilever method. Single cantilever: Single cantilever is a beam fixed horizontally at one end and the free end to be loaded.
Experiment: The given material in the form of uniform bar whose one end is fixed to a rigid support is taken and an empty pan is attached to the other end.
A pin is firmly placed on the top of the loaded end. A traveling microscope adjusted to the vertical transverse is focused to the tip of the pin and the reading is taken and entered in the tabular column. A suitable weights are attached to the pan in a equal increments and the reading of the traveling microscope are noted for the corresponding positions of the tip of the pin.
Load (g)
m1TM reading (cm)Mean
R1Load
(g)
m2TM readings (cm)Mean
R2Depression for the load
(m2-m1)
R2(R1
Load increasingLoad decreasingLoad
IncreasingLoad decreasing
WW + 40
W + 10W + 50
W + 20W + 60
W + 30W + 70
After the required value of the load in the pan is attained, weights are unloaded by the same amount in each step as they were added while loading. The corresponding readings are entered in the tabular column. The value of is evaluated from the table. The length of the beam between the point of emergence of the beam from the rigid support and the point where the pin is mounted is measured. The breadth b and the thickness d of the beam are also measured. The youngs modulus of the material of the beam is calculated by using the formula N m-2.
b
l
W
UNIT 2. QUANTUM MECHANICS
Quantum Mechanics
Newtons laws describe the motion of the particles in classical mechanics and Maxwells equations describe electromagnetic fields in classical electromagnetism. The classical mechanics correctly explains the motion of celestial bodies like planets, macroscopic and microscopic terrestrial bodies moving with non-relastivistic speeds. However classical theory does not hold in the region of atomic dimensions. The classical theory could not explain the stability of atoms, energy distribution in the black body radiation spectrum, origin of discrete spectra of atoms etc. It also fails to explain large number of observed phenomena like photo electric effect, Compton effect, Raman effect etc. The insufficiency of classical mechanics led to the development of quantum mechanics. Quantum mechanics is the description of motion and interaction of particles at the small scale atomic system where the discrete nature of the physical world becomes important. With the application of quantum mechanics, several problems of atomic physics have been solved. Wave and particle duality of radiation
To understand the wave and particle duality, it is necessary to know what is a particle and what is a wave.
A particle is a localized mass and it is specified by its mass, velocity, momentum, energy etc. Whereas a wave is a spread out mass and is characterized by its wavelength, frequency, velocity, amplitude, intensity etc. It is hard to think mass being associated with a wave. Considering the above facts, it appears difficult to accept the conflicting ideas that radiation has wave particle duality. However this acceptance is essential because the radiation exhibits phenomena like interference, diffraction, polarization etc, and shows the wave nature and it also the particle nature in photo electric effect, Compton effect etc.
Radiation, thus, sometimes behave as a wave and at some other time as a particle, this is the wave particle duality of radiation. Here it should be remembered that radiation cannot exhibit its wave and particle nature simultaneously.
de- Broglies concept of matter waves.
Louis de-Broglie in 1924 extended the wave particle dualism of radiation to fundamental entities of physics such as electrons, protons, neutrons, atoms, molecules etc. de-Broglie put a bold suggestion that like radiation, matter also has dual characteristic, at a time when there was absolutely no experimental evidence for wave like properties of matter waves. de-Broglie hypothesis of matter waves is as follows.
In nature energy manifests itself in two forms namely matter and radiation.
Nature loves symmetry
As nature loves symmetry, if radiation act like wave sometime and like particle at some other times then the material particles ( like electrons, protons etc) should also act as waves at some other times.
The waves associated with matter in motion are called matter waves or de-broglie waves or pilot waves
Wave length of matter waves: The concept of matter waves is well understood by combining Plancks quantum theory and Einsteins theory. Consider a photon of energy E, fre4quancy and wavelength .
By Plancks theory
By Plancks theory
Where p is the momentum of the photon.
Now consider a particle of mass m moving with a velocity and momentum p.
According to the do-Broglie hypothesis matter also has dual nature . Hence the wavelength of
matter waves is given by
. This is the equation for the de-Broglie wave length
de Broglie wavelength of an electron
Consider an electron of mass m accelerated from rest by an electric potential V. The electrical work done (eV) is equal to the kinetic energy gained by the electron.
therefore wavelength of electron wave
But
Note : Instead of a an electron, if a particle of charge q is accelerated through a potential difference V, then
Properties of matter waves
1. Lighter the particle, greater would be the wavelength of matter waves associated with it.
2. Smaller the velocity of the particle, greater would be the wavelength.
3. For V = 0, is infinity ie, the wave becomes indeterminate. This means that matter waves are associated with moving particles.
4. Matter waves are produced by charged or uncharged particles in motion. Where as electromagnetic waves are produced only by a moving charged particle. Hence matter waves are non electromagnetic waves.
5. In an isotropic medium the wavelength of an electromagnetic eave is a constant whereas the wave length of a matter wave changes with the velocity of the particle. Hence matter waves are non- electromagnetic waves.
6. Velocity of any wave is greater by . therefore for a matter wave, wave velocity u is given
As the velocity of a particle cant exceed the velocity of light c, the velocity of matter waves is greater than the velocity of light.
7. A particle is a localized mass and a wave is a spread out spark. so, the wave nature of matter introduces a certain un certainty in the position of the particle.
8. Matter waves are probability waves.
Heisenbergs uncertainty principle.
Heisenbergs uncertainty principle is a direct consequence of dual nature of matter. In classical mechanics, a moving particle at any instant has a fixed position in space and a definite momentum which can be determined if the initial values are known (we can know the future if we know the present)
In wave mechanics a moving particle is described in terms of a wave group or wave packet. According to Max Borns probability interpretation the particle may be present anywhere inside the eave packet. When the wave packet is large, the momentum can be fixed but there is a large infiniteness in its position. On the other hand if the wave packet is small the position of the particle may be fixed but the particle will spread rapidly and hence the momentum ( or velocity ) becomes indeterminate. In this way certainty in momentum involves uncertainty in position and the certainty in position involves uncertainty in momentum. Hence it is impossible to know within the wave packet where the particle is and what is its exact momentum. (we cannot know the future because we cannot know the present). Thus we have Heisenbergs uncertainty principle.
According to the Heisenbergs uncertainty principle It is impossible to specify precisely and simultaneously certain pairs of physical quantities like position and momentum that describe the behaviour of an atomic system. Qualitatively this principle states that in any simultaneous measurement the product of the magnitudes of the uncertainties of the pairs of physical quantities is equal to or greater than h/4 ( or of the order of h)
Considering the pair of physical quantities as position and momentum, we have
px h/4 ..1
Where p and x are the uncertainties in determining the momentum and the position of the particle. Similarly we have other canonical forms as
Et h/4
2
J h/4
3
Where E and t are uncertainties in determining energy and time while J and are uncertainties in determining angular momentum and angle.
Experimental illustration of uncertainty principle
As an illustration of Heisenbergs Uncertainty Principle Neil Bohr proposed a thought experiment to the inevitable error involved to locate the position of an electron.
Let OP be the axis of an imaginary - ray microscope perpendicular to x- direction. Consider a -photon of wavelength and momentum h/ moving along x-direction strikes a stationary electron at P and undergoes Compton scattering at an angle to the x- direction and the electron recoils though an angle as shown in the following figure. Let be the wavelength of the scattered photon [according to Compton scattering there will be a change in the wave length of the scattered photon as it transfers part of its energy to the free electron]Fig. - ray microscope
For the angle < (90- ) and also for > (90+ ) the electron will not be seen at all as it cannot enter the microscope. The scattered photon can enter the microscope anywhere between PA and PB.
If the electron is scattered along PA
The x-component of momentum of the scattered photon = ( h/ ) cos
= ( h/ ) cos ( 90-)
= ( h/ ) sin The change in the momentum of the photon = ( h/ ) - ( h/ ) sin - - - - - - - - - - (1)
The change in the momentum of the photon is equal to the gain in the momentum of the electron and it is also the momentum of the electron because its initial momentum is zero.The momentum of the electron = ( h/ ) - ( h/ ) sin - - - - - - - - - - (2)
If the electron is scattered along PB
The x-component of momentum of the scattered photon = ( h/ )cos ( 90+)
= -( h/ ) sin
The change in the momentum of the photon
= ( h/ ) + ( h/ ) sin - - - - (3)
The change in the momentum of the photon is equal to the gain in the momentum of the electron and it is also the momentum of the electron because its initial momentum is zero.
As the scattered photon can enter the microscope anywhere between PA and PB there is an uncertainty in the momentum of the electron is given by (Px )maxMaximum uncertainty in locating the position of the electron
(Px )max = [( h/ ) + ( h/ ) sin ] [( h/ ) ( h/ ) sin ]
(Px )max = 2h/ sin - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(4). 6
For the photon to be seen by the microscope, there should be a Compton scattering of the photon and the recoil of the electron. Thus there is a change in the position of the electron. The smallest distance between any two points that can be resolved by a microscope is called the limit of resolution and it is equal to /2sin
The minimum uncertainty in the position of the electron = (x)min = /2sin . - - - - - (5).
From the equations (4) band (5) we havePx .x /2sin . 2h/ sin x h
Px .x hAs h> h/4, the above equation is in accordance with the Heisenbergs Uncertainty principle Px .x h/4.
Schrdingers Wave Equation
In1926 Schrdinger starting with de-Broglie equation ( = h/mv ) developed it into an important mathematical theory called Wave mechanic which found a remarkable success in explaining the behaviour of atomic system and their interaction with electromagnetic radiation and other particles. In water waves, the quantity that varies periodically is the height of water surface. In sound waves it is pressure. In light waves, electric and magnetic fields vary. The quantity whose variation gives matter waves is called wave function (). The value of wave function associated with a moving body at a particular point x in space at a time t is related to the likelihood of finding the body there at a time. A wave function (x,t) that describes a particle of entirely un known position moving in a positive x-direction with precisely known momentum and kinetic energy may assume any one of the following forms:
Sin( wt -kx) , cos( wt -kx), ei(wt kx), e-i(wt kx), e-iwt, e-i kx or some linear combination of them.
Schrdinger wave equation is the wave equation of which the wave functions are the solutions. It cannot be derived from any basic principles. It is an equation arrived at, consistent with previous theoretical and experimental results and is able to predict new verifiable results.
Time independent, one dimensional Schrdinger wave equation.
In many situations the potential energy of the particle does not depend on time explicitly; the force that acts on it, and hence the potential energy vary with the position of the particle only. The Schrdinger wave equation for such a particle is time independent wave equation. Let (x,t) be the wave function of the matter wave associate with a particle of mass m moving with a velocity v. The differential equation of the wave motion is as follows.
The solution of the Eq.(1) as a periodic displacement of time t is
(x,t) =0(x) e-iwt ..(2)
Where 0(x) is amplitude of the matter wave.
Differentiating Eq.2 partially twice w.r.t. to t, we get
0(x) e-iwt
0(x) e-iwt
0(x) e-iwt
- .(3)
Substituing Eq.3 in Eq.1
..(4)
We have
Substituting this in Eq4, we get
Substituting the wavelength of the matter waves =h/mv in Eq.6 we get
If E and V are the total and potential energies of the particle respectively then
The kinetic energy of the particle
Substituting this in Eq.7, we get
This is the Schrdinger time- independent, one dimensional wave equation.
Physical significance of the wave functionThe wave function (x,t) is the solution of Schrdinger wave equation. It gives a quantum-mechanically complete description of the behaviour of a moving particle. The wave function cannot be measured directly by any physical experiment. However, for a given , knowledge of usual dynamic variables, such as position, momentum, kinetic energy etc.,of the particle are obtained by performing suitable mathematical operations on it.
The most important property of is that it gives a measure of the probability of finding a particle at a particular position. In general is a complex quantity whereas the probability must be real and positive. Therefore a terrm called probability density is defined. The probability P(x.t) density is a product of the wave function and its complex conjugate *.
is also called the probability amplitude.
Normalization of wave function.
If is a wave function associated with a particle then is the probability of finding the particle in a small volume d . If it is certain that the particle is present in a volume then the total probability in the volume is unity i.e . This is the normalization condition and the wave function is called normalization condition.
In one dimension the normalization condition is
Note: When the particle is bound to a limited region the probability of finding the particle at infinity is zero i.e ., is zero.Properties of wave function:
The wave function should satisfy the following properties to describe the characteristics of matter waves.
1. must be a solution of Schrdinger wave equation2. The wave function should be continuous and single valued everywhere. Because it is related to the probability of finding a particle at a given position at a given time, which will have only one value.
3. First derivative of with respect to its variables should be continuous and single valued everywhere, because is finite.
4. must be normalized so that must go to 0 as x , so that over all the space be a finite constant.Eigen functions and Eigen valuesThe Schrdinger wave equation is a second order differential equation, it will have many mathematically possible solutions (). All mathematically possible solutions are not physically acceptable solutions. The physically acceptable solutions are called well behaved functions or Eigen functions (). To an acceptable wave function , it has to satisfy the following criteria.
1. is single valued
2. and its first derivative with respect to its variable are continuous everywhere.3. is finite everywhere
Eigen functions: Once the Eigen functions are known, they can be used in Schrdinger wave equation to evaluate the physically measurable quantities like energy, momentum etc., these values are called Eigen values. In an operator equation where is an operator for the physical quantity and is an Eigen function and is the Eigen value. Applications of Schrodingers wave equation
1. For a Particle a in one-dimensional potential well of infinite depth.
(or Particle in a box)
Consider a particle of mass m moving freely in
x- direction in the region from x=0 to x=a. Outside this region potential
energy V is infinity and within this region V=0.
Outside the box Schrodingers wave equation is
This equation holds good only if ( =0 for all points outside the box i.e., , which means that the particle cannot be found at all outside the box.
Inside the box v=o, hence the Schrodingers equation is given by,
where,
Discussion of the solution
The solution of the above equation is given by
where A & B are constants which depending on the boundary conditions of the well.
Now apply boundary conditions for this,
Condition: I at x =0, ( = 0. Substituting the condition I In the equation 4, we get A =0and B0.
(If b is also zero for all values of x, is zero . This means that the particle is not present in the well.)
Now the equation 3 can be written as
Condition: II : at x =a, ( = 0
Substituting the condition II in equation 5 we get 0= B sin(ka)
where, n = 1,2,3.
Substitute the value of k2 in equation (3).
The equation 6 gives energy values or Eigen value of the particle in the well. When n=0, (n = 0. This means to say that the electron is not present inside the box, which is not true. Hence the lowest value of n is 1.
( The lowest energy corresponds to n =1 is called the zero-point energy or Ground state energy.
All the states of n(1 are called excited states.
To evaluate B in equation (3), one has to perform normalization of wave function.
Normalization of wave function:
Consider the equation,
The integral of the wave function over the entire space in the box must be equal to unity because there is only one particle within the box, the probability of finding the particle is 1.
But
Thus the normalized wave function of a particle in a one-dimensional box is given by,
where n=1,2,3
This equation gives the Eigen functions of the particle in the box. The Eigen values are as follows.
Since the particle in a box is a quantum mechanical problem we need to evaluate the most probable location of the particle in a box and its energies at different permitted state.
Let us consider first three cases
Case (1) n=1.This is the ground stat and the particle is normally found in this state.
For n=1, the Eigen function is
In the above equation ( =0 for both x=0 & x=a. but (1 has maximum value 2/a for x=a/2.
1
A plot of the probability density versus x is as shown. From the figure, it indicates the probability of finding the particle at different locations inside the box.
( =0 at x = 0 and x = a also is maximum 2/a at x = (a/2).
This means, in the ground state the particle cannot be found at the walls of the box and the probability of finding the particle is maximum at the central region. The Energy in the ground state.
Case 2 : n =2
This is the first excited state. The Eigen function for this state is given by
now, (2 =0 for the values
and (2 reaches maximum at
these facts are seen in the following plot.
From the figure it can be seen that at x = 0, and at at It means that in the first excited state the particle cannot be observed either at the walls or at the center.
The energy is .
Thus the energy in the first excited state is 4 times the zero point energy.
Case 3: n =3.
This is the second excited state and the Eigen function for this state is given by
now, (3 =0 for the values
and (2 reaches maximum at
=0 for the values
and reaches maximum 2/a at at which the particle is most likely to be found.
The energy corresponds to second excited state is given by .
UNIT 3. LASER AND OPTICAL FIBERS.
LASERS
LASER is the acronym of Light Amplification by the Stimulated Emission of radiation.Characteristics of Laser beam
Directionality: The design of the resonant cavity, especially the orientation of the mirrors to the cavity axis ensures that laser output is limited to only a specific direction.
Monochromaticity: The laser beam is characterized by a high degree of monochromaticity (single wavelength or frequency) than any other conventional monochromatic source of light .the bandwidth ((() of the laser beam is narrow, while ordinary light spreads over a wide range of wavelength.
Coherence: The degree of coherence of a laser beam is very high than the other sources. The light from laser source consists of wave trains that are in identical in phase. Further it can be focused to a very small area 0.7(m2.
High Intensity: The laser beam is highly intense. When laser beam is incident on a square meter of surface, the energy incident is of the order of millions of joules.
Focus ability: since laser is highly monochromatic, it can be focused very well by a lens. Yet it is so sharp the diameter of the spot will be close to the wavelength of the focused light. Since even laser is not ideally monochromatic the spot diameter in actual cases will be 100 to 150 times larger than the wavelength.
Basic principles:Radiation interacts with matter under appropriate conditions .The interaction leads to an abrupt transition of the quantum system such as an Atom or a molecule from one energy state to another. If the transition is from a higher state to a lower one, the system gives out a part of its energy and if the transition is in the reverse direction, then it absorbs the incident energy.There are three possible ways through which interaction of radiation and matter can take place, They are Induced absorption:
Induced absorption is the absorption of an incident photon by a system as a result of which the system is elevated from a lower energy state to a higher energy state, where in the difference in energy of two states is precisely the energy of the photon.
The rate of induced absorption per unit volume is proportional to the number of atoms in the ground state and to the energy density of the incident photon.
Rate of induced absorption = B12UN1E2
Incident photon
E1
The process can be represented as,
Atom +Photon Atom *.
Spontaneous Emission:
Spontaneous emission is the emission of a photon, when a system transits from higher Energy State to lower Energy State without the aid of any external agency after a time of 10-9s.
Emitted photon
A photon of energy equal to the difference in the energy of the two states is released i.e., The energy of the emitted photon is E2 - E1 .The rate of spontaneous emission per unit volume is proportional to the number of atoms in the excited state.
Rate of spontaneous emission = A12N2 The process can be represented as,
Atom * Atom + photon
Stimulated Emission:
Stimulated Emission is emission of a photon by a system, under the influence of an incident photon of just the right energy that is equal to the energy difference of the two levels due to which the system transits from a higher energy state to lower Energy State. The photon emitted is called the stimulated photon and will have same phase, energy and direction of movement as that of the incident photon called stimulating photon
E2
Stimulated Photon
Incident photon
E1
The rate of induced emission per unit volume is proportional to the number of atoms in the excited state and to the energy density of the incident photon.
Rate of induced absorption = B21UN2The process can be represented as:
Atom * + photon
Atom + (photon + photon)
This is the kind of emission, which is responsible for laser action.
To achieve higher probability of stimulated emission we make use of the Phenomenon population inversion.Suppose we have two energy level system E1& E2 and say the number of atoms in E1 is N1and number of atoms in E2 is N2.At any given temperature, under thermal equilibrium conditions Boltzmann relation gives the distribution of atoms in different energy states.
Under normal conditions, the number of atoms in the higher energy state is less than the number of atoms in the lower energy state that is N2N1).b) Under equilibrium condition, the ratio of stimulated emissions to spontaneous emission is very small. The ratio is
In order to increase stimulated emission it is essential that N2>N1.Even if the population is more in the excited state, there will be a competition between stimulated and spontaneous emission. With metastable states ( the atom resides in that level for an unusually longer time, which is of the order of 10-3 to 10-2 s)the probability of spontaneous can be reduced. The above relation indicates that it is possible to have a higher stimulated emission than spontaneous emission, when photon energy density is high.
Three energy level system:
Consider three energy levels E1, E2 and E3 of a quantum system of which the level E2 is metastable state. Let the atoms be excited from E1 to E3 state by supply of appropriate energy. And then the atom from the E3 state undergoes downward transition to either E1or E2 states rapidly. Once the atoms undergo downward transitions to level E2 they tend to stay, for a long interval of time, because of which the population of E2 increases rapidly. Transition from E2 to E1 being very slow, in a short period of time the number of atoms in the level E2 is far greater than the level E1. Thus when E2 and E1 are compared the number of atoms in the former is greater than the number of atoms in later. Population inversion has been achieved. The transition from metastable state to ground state is the lasing transition.
Metastable state
lasing transition
Requisites of a laser system: An active medium is needed which is able to produce laser light.
An active medium that supports population inversion.
A pumping mechanism is needed to excite the atoms to higher energy levels
An optical resonator.
Active medium: A medium in which light gets amplified is called an active medium. The medium may be solid, liquid or gas. In an active medium, only small fractions of atoms of particular species are responsible for stimulated emission and consequent light amplification these atoms are called active centers.
Optical pumping: For realizing and maintaining the condition of population inversion, the atoms has to be raised continuously to the excited state .It requires energy to be supplied to the system. The process by which atoms are raised from the lower level to upper one is called the pumping process.
There are number of techniques for excitation, are used in laser devices they are optical pumping, electrical pumping, chemical pumpingetc.
Optical resonator:
An optical resonator generally consists of two plane mirrors, with the active material placed in between them. One of the mirrors is semitransparent while the other one is 100% reflecting. The mirrors are set normal to the optic axis of material.
The optical resonant cavity provides the selectivity of photon states by confining the possible direction of photon propagation .as a result lasing action occurs in this direction.
The distance between the mirrors is an important parameter as it chooses the wavelength of the photons. Suppose a photon is traveling from the direction X to Y.it undergoes reflection at the mirror kept at the other end .the reflected wave superposes on the incident wave and forms stationary wave pattern whose wavelength is given by
= 2L/n
Where L is the distance between the mirrors.
is the wavelength of the photon. n is the integral multiple of half wavelength
Einstein's Coefficients
Consider two atomic states of energies E1 and E2 of a system. Let N1 be the number of atoms in the lower energy state E1, and N2 be the number of atoms in the higher energy state E2 per unit volume of the system. Let radiation with a spectrum of frequencies be incident upon the system .let U( d( is the energy density incident/unit volume of the system. According to Albert Einstein, atomic transitions can be of three types. They are
1.Induced or stimulated absorption: In this process atom in the lower state E1 absorbs photon and get excited to higher state E2 .The number of such absorptions per unit time, per unit volume is called rate of absorption.
The rate of absorption is proportional to,
(a) The number density of lower energy state, i.e., N1, and,
(b) The energy density i.e., U
Rate of absorption = B12N1U (1)
Where B12 is the constant of proportionality called Einsteins coefficient of induced absorption
2.Spontaneous emission: In this process atom in the higher energy state E2 suffer spontaneous transition to the lower energy state E1 by emitting the radiation without the aid of any external agency .The emitted radiation is called spontaneous radiation and the phenomenon is called spontaneous emission .The number of such spontaneous emissions per unit time, per unit volume is called rate of spontaneous emission.
The rate of spontaneous emission is proportional to,
(a) The number density of higher energy state i.e., N2
Rate of spontaneous emission = A21N2 (2)
Where, A21 is the constant of proportionality called the Einstein's coefficient of spontaneous emission.
3.Induced or stimulated emission: In this process an atom in the higher energy state E2 is induced by the photon of right amount of energy to make a downward transition to the lower energy state E1 .The number of stimulated emission per unit time per unit volume called rate of stimulated emission
Rate of stimulated emission, is proportional to,
(a) The number density of the higher energy state i.e., N2, and
(b)The energy density i.e., U
Rate of stimulated emission = B21N2U, (3)
Where, B21 is the constant of proportionality called Einsteins coefficient of stimulated emission.
To get a relationship between these coefficients Einstein considered atoms to be in thermal equilibrium with radiation field, which means that the energy density U is constant in spite of the interaction that is taking place between itself and the incident radiation. This is possible only if the number of photons absorbed by the system per sec is equal to the number of photons it emits by both the stimulated and spontaneous emission processes.
At thermal equilibrium,
Rate of absorption = Rate of spontaneous emission + Rate of stimulated emission
B12N1U = A21N2 + B21N2UOr U (B12N1 B21N2) = A21N2
Or
By rearranging the above equation, we get
(4)
But, by Boltzmann's law, we have,
Equation (4) becomes,
(5)
According to Planck's law, the equation for U is,
(6)
Now comparing the equation (5) and (6), term by term on the basis of positional identity, we have,
And,
Or
Which implies that the probability of induced absorption is equal to the probability of stimulated emission. Because of the above identity, the subscripts could be dropped, and A21 and B21 can be simply represented as A and B and equation (6) can be rewritten.
At thermal equilibrium the equation for energy density is
SEMICONDUCTOR DIODE LASER
Semiconductor diode laser is a specially fabricated p-n junction device that emits coherent light when it is forward biased. Semiconductor lasers are the smallest (compact) and least expensive of all the lasers available. Pumping is due to current flowing in the device, makes the semiconductor laser the topmost in efficiency among all the laser devices. Egs,. GaAs, CdSe, all direct band gap semiconductors. In the case of silicon and germanium the energy is released in the form of heat. Hence these materials are not suitable for fabricating laser.
In the case of direct band gap semiconductors the band gap energy due to the electron-hole recombination released in the form of photon of light Therefore they are suitable for making lasers.
Construction:
Laser beam
The gallium arsenide laser diode is a single crystal of GaAs, and consists of a heavily doped n and p sections. n- section is derived by doping GaAs with tellurium and the p section is derived by doping GaAs with Zinc. The doping concentration is very high and is of the order of 1017-1019 dopants atoms /cm3.
The diode is extremely small with each of its size of the order 1mm.
The p-n junction layer forms the active region. The junction layer (active region) has a width varying from 1m to 100m depending upon the diffusion and temperature conditions at the time of fabrication.
The resonant cavity is required for energy amplification ,is obtained by cleaving the front and back faces of the semiconducting material
The junction lies in a horizontal plane through the center, the top and bottom faces are metallized and ohmic contacts are provided to pass current through the diode.
The front and rear faces are polished or cleaved at right angle to the junction layer, these planes play the role of reflecting mirror.
The other two faces are roughened to trap light inside the crystal.
Working:
The GaAs laser diode is subjected to a forward bias by using a d.c source as shown in the figure .At an absolute zero temperature (T=0K) for a semiconductor the conduction band is completely empty and valance band is completely filled, separated by the energy band gap(Eg). By the process of doping large number of charge carriers are available at room temperature due to thermal excitation.
When p-n junction is forward biased with a large current, it raises the electrons from the valance band to the conduction band, because this is an unstable state within a short time .the electrons in the conduction band drop to the lowest level in that band. At the same time, the electrons near the top of the valence band will drop to the lowest unoccupied levels, leaving behind holes. The lowest level within the conduction band is with a large concentration of electrons and the top of the valence band is full of holes. This is the state of population inversion. The narrow region where the state of population inversion is achieved is called active region.
At some instant, one of the excited electrons from the conduction band falls back to the valence band and recombines with a hole, and the energy associated with this recombination is emitted as a photon of light. This photon as it moves, stimulates the recombination of another excited electron with a hole and releases another photon.
These two photons are in phase with each other and have the same wavelength, thus travel together, get reflected at the end face. As they travel back, they stimulate more electron hole recombination with the release of additional photons of same wavelength coherence in nature. This beam gets resonated by travelling back and forth, and finally comes out through the partially reflecting face. As the current increase continuously, more electrons excited to the conduction band and generate holes in the valance band. This situation maintains population inversion.
The stimulated electron hole recombinations cause emission of coherent radiation of very narrow bandwidth. Semiconductor diode laser emits light at a wavelength lies in IR and visible region.
At low forward current level, the electron-hole recombination cause spontaneous emission of photons and junction acts as an LED.
These lasers are used in communications laser printers CD players etc.
Nd:YAG LASER :
Flash lamp Nd:YAG Rod Ellipsoidal reflector
M1
Trigger pulse
Capacitor bank
^^^^^
Power supply Resistor
Flash lamp Nd:YAG Rod
Ellipsoidal reflector
CONSTRUCTION:
Nd:YAG laser is one of the most popular solid state laser. Yittrium aluminiun garnet Y3Al5O12 ,commonly called YAG is an optically isotropic crystal.
Some of the Y3+ ions in the crystal are replaced by neodymium ions, Nd3+. The crystal atoms do not participate in the lasing action but serve as host lattice in which the active centers, namely Nd3+ ions reside.
It consists of an elliptically cylindrically reflector housing the laser rod along one of its focus lines and a flash lamp along the other focus line.
The two ends of the laser rod are polished and silvered and constitute the optical resonator.
The light leaving one focus of the ellipse will pass through the other focus after reflection from the silvered surface of the reflector. Thus the entire radiation is focused on the laser rod.
Working:
Energy level diagram
The pumping of the Nd3+ ions to upper state is done by a krypton arc lamp.
The optical pumping with light of wavelength range 5000 to 8000Aexcites ground state Nd3+ ions to higher states.
The metastable state E3 is the upper laser level and E2 forms the lower laser level.
The upper laser level E3 will be rapidly populated, as the excited Nd3+ ions quickly make a downward transition from the upper energy bands.
The population inversion is achieved between E3 and E2 level.
The laser emission occurs in infrared region at a wavelength 10,600A.
Nd:YAG lasers find applications like welding, hole drilling.etc.Applications of Lasers
Lasers find applications in various fields such as medicine, material processing, communications, energy resources, and photography. Etc.
Laser welding, cutting and drilling
Welding:
the
The laser is focused on to a spot to be welded.
Due to heat generation, the material melts over a tiny area on which beam focussed.
An impurity such as oxides floats upon the surface.
On cooling the material within becomes homogenous solid structure which makes weld strong
No destruction occurs in the regions around the welded portion
Since it is a contact less process no foreign material comes in contact in to the welded joint.
Since the heat-affected zone is small, laser welding is ideal in areas such as microelectronics.CO2 lasers are the most popular ones in this particular application.
Cutting:
Oxygen
Laser cutting is generally done assisted by gas blowing.
The combustion of the gas burns the metal thus reducing the laser power requirement for cutting.
When laser melts the local region the gas blows away the tiny splinters. The blowing action increases the depth and speed of the cutting process.
The quality of cutting is very high.
Complicated 3D cutting profiles is possible.
There will be no thermal damage and chemical change when cutting is done to regions around cut area.
Drilling:
Drilling of holes is achieved by subjecting materials to laser pulses of duration 10-4to 10-3 second.
The intense heat generated over a short duration by the pulses evaporates the material locally, thus leaving a hole.
ND-YAG laser is used to drill holes in metals, where as co2 is used in both metallic and non -metallic materials.
In conventional methods tools wear out while drilling whereas the problem doesn't exist with laser setup.
Drilling can be achieved at any angle.
Very fine holes of diameter 0.2 to 0.5mm could be drilled with a laser beam
Very hard materials or brittle materials could be subjected to laser drilling since there is no mechanical stress with a laser beam.
Pulsed Laser Deposition (PLD):
PLD is a new unconventional evaporation technique. It is one of the newer techniques for depositing thin films, making use of interaction of laser beams with material surfaces.
The PLD process is schematically depicted as shown in the figure
In its configuration a high power laser situated outside the vacuum deposition chamber is focused by means of external lenses onto the target surface, which serves as evaporation source. Lasers that have been most widely used for PLD center around Nd:YAG laser (wavelength= 1.064m) and gas excimer laser.Irrespective of the laser used, absorbed beam energy is converted into thermal, chemical and mechanical energy, causing electronic excitation of target atoms and exfoliation of the surface. The evaporants form a plume above the target consisting of a collection of energetic neutral atoms, molecules, ions, electrons, atom clusters, micron sized particulates and molten droplets. They are propelled to the substrate where they condense to form a film.One of the drawbacks of PL technique is that plume is highly directional which makes it difficult to uniformly deposit films over large substrate areas. Another drawback is splashing of macroscopic particles during laser- induced evaporation. Splashing of macroscopic particles include rapid expansion of gas trapped beneath target surface, rough target surface morphology whose mechanically weak projections are prone to fracturing during pulsed thermal shocks etc. To avoid splashing, a rapidly spinning pin-wheel like shutter between target and substrate is introduced. Slower moving particulates can be batted back, allowing more mobile atoms, ions and molecules to penetrate this mechanical mass filter.
OPTICAL FIBERS.
Construction
Optical fibers are the light guides used in optical communications as wave-guides. They are transparent dielectrics and able to guide visible and infrared light over long distance. They are made up of two parts. Core the inner cylindrical material made of glass or plastic and the cladding material the other part which envelops the inner core. The cladding is also made of similar material but of lesser refractive index. Both the core and the cladding materials are enclosed in a polyurethane jacket (as shown in fig. 1), which safeguards the fiber against chemical reaction with surroundings, and also against abrasion and crushing.
Core
Wave guides (propagation mechanism)
A wave guide is a tubular structure through which energy of some sort could be guided in the form of waves. In OF light waves can be guided through a fiber, it is called light guide.
The guiding mechanism
The cladding in an OF always has a lower refractive index (RI) than that of the core. The light signal which enters into the core can strike the interface of the core and the cladding only at large angles of incidence because of the ray geometry. The light signal undergoes reflection after reflection within the fiber core. Since each reflection is a total internal reflection (when the angle of incidence is greater than the critical angle, the ray undergoes total internal reflection), the signal sustains its strength and also confines itself completely within the core during propagation. Thus, the optical fiber functions as a wave guide.
Numerical Aperture and Ray Propagation in the Fiber
Let us consider the special case of ray which suffers critical incident at the core cladding interface. The ray, to begin with travels along AO entering into the core at an angle of (0To the fiber axis. Let it be refracted along OB at an angle (1 in the core and further proceed to fall at critical angle of incidence (= 90-(1) at B on the interface between core and cladding. Since it is critical angle of incidence, the refracted ray grazes along BC.
(1 B
(0
0 Core (n1)
A
Cladding (n2)
Incident ray
Now it is clear from the figure that any ray enters at an angle of incidence less than (0 at O, will have to be incident at an angle greater than the critical angle at the interface, and gets total internal reflection in the core material. Let OA is rotated around the fiber axis keeping (0 same, then it describes a conical surface. We can say that it a beam converges at a wide angle into the core, then those rays which are funneled into the fiber within this cone will only be totally internally reflected, and thus confined within for propagation. Rest of the rays emerges from the sides of the fiber.
The angle (0 is called the wave guide acceptance angle, or the acceptance cone half-angle, and sin (0 is called the numerical aperture (N.A.) of the fiber. The numerical aperture represents the light-gathering capability of the optical fiber.
Condition for Propagation:
Let n0, n1and n2 be the RI of surrounding medium, core and cladding respectively.
Now, for refraction at the point of entry of the ray AO into the core, by applying the Snells law that,
N1 Sin (0 = N2 Sin (1 -----1)
At the point B on the interface,
The angle of incidence = 90 - (1
Again applying Snells law, we have,
n1 sin (90-(1) = n2 sin 90.
Or, n1 cos (1 = n2
Or, Cos (1 = n2/n1 ----2)
Rewriting Eq (1), we have,
Sine (0 = n1/n0 sin (1 =
Substituting for Cos (1 from Eq. (2), we have,
If the medium surrounding the fiber is air, then n0 = 1,
Or,
If (I is the angle of incidence of an incident ray, then the ray will be able to propagate,
If, (I < (0 Or if Sin (I < Sin (0Or, Sin (I < N.A.
Fraction Index Changes (():
The fractional index change ( is the ratio of the refractive index difference between the core and the cladding to the refractive index of core of an optical fiber.
Therefore,
( = ------3)
Relation between N.A. and (From Equ. 3) , (n1-n2) = n1 ( ---4)
We have,
Since n1~ n2 , (n1+ n2) = 2n1Therefore,
Though an increase in the value of ( increase N.A., and thus enhances the light gathering capacity of the fiver, we cannot increase ( to a very large value, since it leads to what is called intermodal dispersion which causes signal distortion.
Types of Optical fibers.
In any optical fiber, the whole material of the cladding has a uniform RI value. But the RI of the core material may either remain constant or subjected to variation in a particular way. The curve which represents the variation of RI with respect to the radial distance from the axis of the fiber is called the refractive index profile.
The optical fibers are classified under 3 categories, namely,
a)Single mode fiber, b) step index multimode fiber and c)graded index multimode fiber.
This classification is done depending on the refractive index profile, and the number of modes that the fiber can guide.
a) Single Mode fiber (step index)
A single mode fiber has a core material of uniform RI value. Similarly cladding also has a material of uniform RI but of lesser value. This results in a sudden increase in the value of RI from cladding to core. Thus its RI profile takes the shape of a step. The diameter value of the core is about 8 to 10 (m and external diameter of cladding is 60 to 70 (m. Because of its narrow core, it can guide just a single mode as shown in Fig. 3. Hence it is called single mode fiber. Single mode fibers are most extensively used ones and they constitute 80% of all the fibers that are manufactured in the world today. They need lasers as the source of light. Though less expensive, it is very difficult to splice them. They find particular application in submarine cable system.
b) Step index Multimode fiber:
The geometry of a step-index multimode fiber is as shown in Fig.4.Its construction is similar to that of a single mode fiber but for the difference that, its core has a much larger diameter by the virtue of which it will be able to support propagation of large number of modes as shown in the figure. Its refractive index profile is also similar to that of a single mode fiber but with a larger plane regions for the core.
The step-index multimode fiber can accept either a laser or an LED as source of light. It is the least expensive of all. Its typical application is in data links which has lower bandwidth requirements.
c) Graded-Index Multimode FiberGraded index multimode fiber is also denoted as GRIN. The geometry of the GRIN multimode fiber is same as that of step index multimode fiber. Its core material has a special feature that its refractive index value decreases in the radially outward direction from the axis, and becomes equal to that of the cladding at the interface. But the RI of the cladding remains uniform. It RI profile is also shown in Fib.5 Either a laser or LED can be the source for the GRIN multimode fiber. It is most expensive of all. Its splicing could be done with some difficult. Its typical application is in the telephone trunk between central offices.
Attenuation in optical fibers
The total power loss offered by the total length of the fiber in the transmission of light is called attenuation.
The important factors contributing to the attenuation in OF are
1) Absorption loss, ii) Scattering loss iii) Bending loss iv) Intermodal dispersion loss and v)coupling loss.
The total losses in the fiber are due to the contribution of losses due to absorption, scattering radiation and coupling. All these losses are wavelength dependent and it can be minimized by selecting the operating wavelength.
Attenuation in fiber is defined as the ratio of power input and power output. It is denoted by symbol (. Mathematically attenuation of the fiber is given by,
, dB/km
Where Pout and Pin are the power output and power input respectively, and L is the length of the fiber in km.
1. Absorption loss:
There are two type of absorption, one is Absorption by impurities and the other Intrinsic absorption. In the case of first type, the type of impurities is generally transition metal ions such as iron, chromium, cobalt and copper. During signal propagation when photons interact with these impurities, the electron absorbs the photons and get excited to higher energy level. Later these electrons give up their absorbed energy either as heat energy or light energy. The reemission of light energy is of no use since it will usually be in a different wavelength or at least in different phase with respect to the signal. The other impurity which would cause significant absorption loss is the OH (Hydroxyl) ion, which enters into the fiber constitution at the time of fiber fabrication. In the second type i.e., intrinsic absorption, the fiber itself as a material, has a tendency to absorb light energy however small it may be. Absorption in a fiber is the absorption that takes place in the material assuming that there are no impurities and the material is free of all inhomogeneities, and hence it is called intrinsic absorption which sets the lowest limit on absorption for a given material.
2. Scattering loss:
The power loss occurs due to the scattering of light energy due to the obstructions caused by imperfections and defects, which are of molecular size, present in the body of the fiber itself. The scattering of light by the obstructions is inversely proportional to the fourth power of the wavelength of the light transmitted through the fiber. Such a scattering is called Rayleigh scattering. The loss due to the scattering can be minimized by using the optical source of large wavelength.
3. Bending losses
Bending losses occur due to the presence of macro bends and micro bends that are caused while manufacturing and as well as due to the applied stress on the fiber. At the point of bend the light will escape to the surrounding medium due to the fact that the angle of incidence at that point becomes lesser than the critical angle. Hence it will not undergo total internal reflection. In order to avoid this type of losses, the optical fiber has to be laid straight for long distances and they should be freed from the external stresses by providing mechanical strength by external encasements.
4. Coupling losses
Coupling losses occur when the ends of the fibers are connected. At the junction of coupling, air film may exist or joint may be inclined or may be mismatched and then can be minimized by following the technique called splicing.
Applications
Optical fibers find their applications in the fields of communication, medicine, industry and domestic.
1. Communication applications: (P to P communication)
The block diagram of a typical fiber optic communication system is as shown in the figure. Voice or any information is converted into electrical signals using the coder (photo multiplier) and is connected to the optical transmitter. The light signals from the optical transmitter are connected to the photo detector through optical fiber. The electrical signals from the photo-detector are decoded by the decoder to the original state, which may be the voice or information. In communication electrical signal is converted into optical signal, propagated through optical fibers and converted back into electrical signal at the other end.
Optical fibers find very important, applications in communication because of the following advantages they possess.
a. Transmission loss is low
b. Fiber is lighter and compact than equivalent copper cables.
c. Fibers have large data rate compared to equivalent copper cables
d. There is no interference in the transmission of light from electromagnetic waves generated by electrical applications.
e. Fibers are free from corrosion effect caused by salt, pollution and radiation. Hence, they are more reliable.
f. Tapping information from fiber is impossible. Hence, the transmission is more secured.
g. The cost of fiber optic communication system is lower than that of an equivalent cable communication system..
Optical fibers find few disadvantages in the communication systems. They are:
a. Fiber loss is more at the joints if the joints do not match (the joining of the two ends of the separate fibers are called splicing)
b. Attenuation loss is large as the length of the fiber increases.
c. Repeaters are required at regul