-
1
Applications of Z-Transform in Signal Processing - II
Yogananda Isukapalli
-
Frequency response estimation
h[n]x[n] y[n]
The frequency response of a system can be obtained from its
z-transform as:Given {h[n]},
We have:
nj
n
j
n
n
enheH
znhzH
qq -¥
-¥=
¥
-¥=
-
å
å
=
=
][)(
].[)(
Implies that :
qq
jezj zHeH
== )()( (1)
-
Discrete Time System
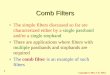
h[n] Example : A Comb Filter
y[n] = x[n] - x[n-12]
zeros zm = 1ejm(2p/12)m=0, 1, 2, ….1112 zeros and 12 poles
H(ejq) = 1 - e-j12q
= j2 e-j6qsin(6q)
=2sin(6q)ej(p /2 - 6q)
12
1212 11)(
zzzzH -=-= -
………….
0 p/6 p/3 p/2 p q
|H(ejq)|
Plot of H(ejq)
3
-
Frequency response function properties :
(1) H(ejq) is a periodic function.
1
.].[)(
].[)(
2
2)2(
)2()2(
=
=
=
-
-¥
-¥=
-+
¥
-¥=
+-+
å
å
mj
mj
m
mjj
m
mjj
e
eemheH
emheH
p
pqpq
pqpq
for all integer values of m
)()(
].[)(
:
)2(
)2(
qpq
qpq
jj
m
mjj
eHeH
emheH
Therefore
=
=
+
¥
-¥=
-+ å
(2) M = |H(ejq)| = |H(e-jq)|)()( qq jj eHeHP --==
(3) MdB = 20log10M
-
Frequency units used in discrete-time systems:
and then evaluating the z- transfer function, H(z), in the
following intervals:
• Two frequency units are normally used to describe the
frequency response of discrete-time systems: w (rad s-1) and f
(Hz)
• The frequency response is found by letting fTjTjj eeez 2pwq
===
-
• The following figure shows how wT and z change as w varies
from 0 to ws.
• As the angle q=wT goes from 0 to 2p the value of z varies from
1 through j and back to 1.
Fig: Units of frequency used in discrete-time systems and their
relationship to points on the unit circle
-
• The following figure also makes it clear that the frequency
response of a discrete-time system is cyclic.
Fig: z-plane unit circle showing critical frequency points
• As we go round the circle one or more revolutions the values
of z simply repeat.
-
Example)
Soln)
-
Geometric evaluation of frequency response:
We have
Õ
Õ
=
=
-
-
=------
=N
ii
N
ii
N
N
pz
zzK
pzpzpzzzzzzzK
zH
1
1
21
21
)(
)(
))...()(())...()((
)(
The frequency response is given by
2/0 sww ££
Õ
Õ
=
=
-
-
==N
ii
Tj
N
ii
Tj
Tjj
pe
zeK
eHeH
1
1
)(
)(
)()(w
w
wq for
(2)
(3)
• For a z-transform with only two zeros and two poles, the
frequency response is given by
2211
2211
21
21
))(())((
)()(
ffqq
ww
wwwq
ÐÐÐÐ
=
--
--==
VVUKU
pepezezeK
eHeHTjTj
TjTjTjj
(4)
-
where U1 and U2distances from the zeros to the point z=ejwT
V1 and V2 distances from the poles to the point z=ejwT
Fig: Geometric evaluation of the frequency response from
pole-zero diagram
•
[ ] )()(1 ,)(
2121
21
21
ffqqw
w
+-+=Ð
==
Tj
Tj
eH
KVVUU
eH(5)
-
• In general, in the geometric method, the frequency response at
a given frequency w (at an angle wT) is given by
poles ofnumber ,...1 zeros, ofnumber ,...1 , ==ÐÐ
jiVU
jj
ii
fq
Example: Determine the frequency response at dc, 1/8, 1/4, 3/8
and 1/2 the sampling frequency of the causal discrete-time system
with the following z-transform:
7071.01)(
-+
=zzzH
Soln) H(z) has single pole and single zero. So,
)sin(7071.0)cos()sin()cos(1
7071.01
)(TjT
TjTee
VUeH
Tj
TjTj
wwww
fq
w
ww
+-++
=-
+=
ÐÐ
= (6)
At dc, wT=0 and the zero and pole vectors to the point z=0 are
ando02Ð o02929.0 Ð
-
o0828.62929.0/2)( Ð==TjeH w
Fig: Frequency response estimation using geometric method and
pole-zero diagram
Thus the frequency response is given by
At 4/8/ ,8/ pwwww === sss FT
oo
o5.676131.2
907071.05.228477.1
)4/sin(7071.0)4/cos()4/sin()4/cos(1
)(
-Ð=Ð
Ð=
+-++
=pp
ppwj
jeH Tj
-
The responses at the remaining frequencies are summarized
below:
Fig: A sketch of the frequency response
-
Example : The Graphical Design of a Comb filter :
• In medical applications, the 60Hz frequency of the power
supply is often “picked up” by the test equipment (EKG
recorder)
• Also harmonically related frequencies such as f2 = 2x60 =
120Hz, and f3 = 3x60 = 180 Hz are generated because of non-linear
phenomena.
14
• It is observed that the magnitude response is symmetrical
about half the sampling frequency (Nyquist frequency), and the
phase response antisymmetrical about the same frequency.
• The frequency response is periodic with a period of ws.
-
• The object of a digital filter design is to eliminate or
suppress these unwanted frequencies which distort or mask up the
signals of interest.
Thus the desired response of the filter would be :
0 60 120 180 f Hz
p/3 2p/3 p q rad
M
Thus we require a nonrecursive (FIR) comb filter:
Note : Digital Frequencies
Sampling frequency 360 Hz15
-
Thus we have :
q1 = w1T = 2p(60)/360 = p/3
q2 = w2T = 2p(120)/360 = 2p/3
q3 = w3T = 2p(180)/360 = p
Proposed pole - zero design :
Note :
1.) Complex zeros must occur in conjugate pairs.
2.) q = 0 is added to eliminate any DC component in the
signal.
0 60 120 180 f Hz
p/3 2p/3 p q rad
Actual Response
16
-
]6[][][
)1()(
1)(
][]6[][
1)())()()()()(1()(
6
6
6
6
35
34
32
3
--=
-=\Þ
-=
-+=
-=
------=
-
nxnxny
zzHzzzH
nxnxny
zzH
ezezezezezzzHjjjjjpp
ppp
Implies :
But the above obtained filter is non-causal !! To make it causal
filter we place six poles at z = 0.
Thus the required causal FIR comb filter is:
17
-
Design of a Notch Filter
SignalNoise
2px60 2px1000 2px1250 wwn w1 w2
Analog
SignalNoise
-0.03p 0.03p 0.5p 0.625p wwn w1 w2
Digital Ts=0.25x10-3sq=wTs
-0.03p 0.03p 0.5p 0.625p wwn w1 w2
Proposed Filter:
18
-
.03p
Pole - Zero Locations
Follows :
and
pq
q
p
03.0
1|)(|
0|)(| 03.0
±¹
»
=±
foreH
eH
j
j
-0.03 p -0.03 p ….. p
Designed Filter|H(ejq)|
X19
-
Sinusoidal Steady state response of discrete -time systems :
h[n]x[n] y[n]
Convolution : å¥
-¥=
-=m
mnxmhny ][][][
Input x[n]: Complex exponential ejnq
Output :
å
å
å
¥
-¥=
-
¥
-¥=
-
¥
-¥=
-
=
=
=
=
m
mjj
njjss
m
mjnjss
m
mnjss
emheH
WhereeeHny
eemhny
emhny
qq
qq
qq
q
].[)(
:)(][
].[][
].[][ )(
20
Note: q=wT (rad)
-
Discrete Time System
h[n]
å¥
-¥=
-=m
mjj emheH qq ].[)(
H(ejq) is the frequency response function.
Example : h[n] = d[n] + d[n-1]
H(ejq) = 1 + e-jq
Now consider the input to the system to be :
)10
cos(101][pn
nx +=
Re-writing the input in terms of complex exponentials:
][][][][
55.1][
321
10100
nxnxnxnx
neeenx
njnjnj
++=
¥££¥-++=
-pp
21
-
Discrete Time System
h[n]
Using the Superposition principle :
We have :
16.01010
16.01010
00
321
97.11)()(
97.11)()(
21)()(:
)()()(][
3
2
1
332211
jjjj
jjjj
jjj
jjjjjjss
eeeHeH
eeeHeH
eeHeH
WhereeceHeceHeceHny
=+==
=+==
=+==
++=
-
--
-
ppq
ppq
q
qqqqqq
We have c1 = 1, c2 = 5, c3 = 5
)16.010
cos(7.192][
)97.1.(52][
)(][
)16.010()16.0
10(
3
1
-+=
úû
ùêë
é++=
=
---
=å
p
pp
qq
nny
eeny
eceHny
ss
njnj
ss
njk
k
kjss
k
22
-
Discrete Time System
h[n]
Generalization:
h[n]x[n] = Acos(nq) yss[n] = AMcos(nq+P)
)(
|)(|
].[)(
q
q
qq
j
j
jP
m
mjj
eHP
eHM
MeemheH
=
=
== å¥
-¥=
-
23
-
Discrete Time System
h[n]
Example :
h[n] = 2d[n] - 3d[n-1] + 4d[n-2]
H(z) = 2 - 3z-1 + 4z-2
H(ejq) = 2 - 3e-jq + 4e-j2q
Example:y[n] + 0.25y[n-4] = x[n] -x[n-2]
4)2(
41
414
)2(4
4
4
22
)25.0()(
25.025.0
25.0)1()(
pp
pp
mj
mj
ez
ez
z
zzzzH
+
+
=
=
-=
+-
=
Filter Poles:
43
2
41
707.0
707.0p
p
j
j
ep
ep
=
=
25.0)1()(
707.0
707.0
4
22
47
4
45
3
+-
=
=
=
q
qqq
p
p
j
jjj
j
j
eeeeH
ep
epPoles are:
Filter is stable :
24
-
Discrete Time System
h[n] Only Stable systems have Sinusoidal Steady State
Response.
H(z)X(z) Y(z)
Y(z) = H(z)X(z)
qq jjin
ezC
ezC
pzzC
pzzCzY in--
+-
+-
+-
=*
2
2
1
1)(
Sinusoidal Input
y[n] = C1P1n + C2P2n + Cinejqn + C*ine-jqn
System Poles Input Poles
y[n] = yss[n] = Cinejqn + C*ine-jqn
if |Pi| < 1 (stable)
25
-
Discrete Time System
h[n] Generalization for Stable System
H(z)Acos(nq) yss[n]
yss[n] = A|H(ejq)|cos(nq +
-
A Typical Signal Processing Example :
Ås[n] Desired Signal
r[n] Signal received at sensor
Digital Filter
g[n] Unwanted Signal due to medium y[n]
• The purpose of designing a digital filter is to minimize the
effect of the unwanted signal or to completely eliminate it from
y[n].
• Specify for illustration :s[n] = Acos(nq) = 10cos(pn/20)
g[n] = Bcos(10qn + f) = 4cos(pn/2 + p/6 )
r[n] = 10cos(pn/20) + 4cos(pn/2 + p/6 )
27
-
Propose :
y[n] = r[n] + 0.9r[n-2]
Then :
)62
cos(4.0][
1.0)(
)62
cos(4][
)15.020
cos(8.18][
88.19.01)(
)20
cos(10][
9.01)(
9.01)(
1
02
1
15.01020
2
2
pp
pp
p
p
p
pp
qq
+=
=
+=
-=
=+=
=
+=
+=
--
-
-
nny
eeH
nnr
nny
eeeH
nnr
eeH
zzH
ss
jj
ss
jjj
jj
By Superposition :
For an Input of :
For an input of :
28
-
)62
cos(4.0)15.020
cos(8.18][ppp
++-=
\Þnnnyss
Notes:
1.) Desired Signal is amplified by a factor of 1.88 when passed
through the filter.
2.) Filter response :
p/10 p/2 3p/4 p q
2.0
1.75
0.25
3.) Sketch the Pole zero locations of the filter.
29