Embed Size (px)
Citation preview

Discrete Time System
h[n]
1
Yogananda Isukapalli
Applications of Z-Transform in Signal Processing - I

Discrete Time System
h[n]
Definition:
å¥
-¥=
-=n
nznhzH ][)(
Causal : {h[n]} = 0 for n < 0
å¥
=
-=0
][)(n
nznhzH
Example :
Consider two identical systems :
{h[n]} = (1/2)n , n ³ 0
h1[n]x[n] y[n]
h2[n]
h1[n] = h2[n] = (1/2)n , n ³ 0
2
Causal and Stable systems

Discrete Time System
h[n]
Response :
y[n] = (x[n]* h1[n] )* h2[n]
Taking the z transform we have:
Y(z) = X(z)H1(z) H2(z)
21
12
11
211
)()(
211
1)(
211
1)(
÷øö
çèæ -
=
-=
-=
-
-
-
z
zXzY
zzH
zzH
Suppose Now : x[n] = 1 for n ³ 0
111)( --
=z
zX
Now:
3

Discrete Time System
h[n]
Therefore now the response of the system for the given Input would be :
( )
0..)21)(1()
21(24][
)21()
21(
21
4)( ..
)21)(1(
)( ..
2111
1)(
2
2
2
3
211
³+--=
--
--
-=
--=
÷øö
çèæ --
=--
nnny
z
z
z
zzzzYei
zz
zzYei
zzzY
nn
4

Discrete Time System
h[n]
Stability Theorem :
The system is said to be stable if and only if :
å¥
-¥=
¥<n
nh |][|
Recall :
å
å
å
¥
-¥=
¥
-¥=
¥
-¥=
£
-£
¥<<
-=
m
m
m
mhlny
mnxmhny
thenlx
assume
mnxmhny
|][||][|
|][||][||][|
|[.]|:
][][][
5

Discrete Time System
h[n]
Follows : |y[n]| is bounded if and only if :
å¥
-¥=
¥<n
nh |][|
Stable Causal Systems :
Example :
2
2
1
10)(
)}({]}[{
pzC
pzCCzH
zHnh
-+
-+=
«
Poles : p1, p2
Follows : h[n] = C0d[n] + C1p1n + C2p2
n
If h[n] ® 0, as n ®¥ then :
Implies ® if |pi| < 1 for all ih[n] ® 0, as n ®¥
å¥
-¥=
¥<n
nh |][|
6

Discrete Time System
h[n]
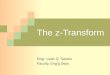
p1 p2
|z| = 1
ROC includes the unit circle |z| = 1 for a stable {|pi| < 1} causal systems.
Formal Definition: A causal system with a rational transfer function H(z) is stable if all the poles (pi) of H(z) are located inside the unit circle.
7

Discrete Time System
h[n]
Example :
0][][][)(
)(
1
2
®=
-=
-
nhnunpnh
pzzzH
n
if |p| < 1as n ®¥
Stable even for repeated poles if |pi| < 1
Marginally Stable
nnh
zzzH
1][)1(
)(
=
-=
å¥
-¥=
¥<n
nh |][|
is not satisfied.
For finite N is bounded
pole is on |z| = 1
å¥
-¥=nnh |][|
8

Discrete Time System
h[n]
Complex Conjugate poles on the unit circle :
å ¥<
=+=
-+
-=
-
---
|][|
][)cos(2][][
)1(1
)1(1
)(
0
11
00
00
nh
nunnheenh
ezezzH
njnj
jj
q
is satisfied for finite N.
Multiple poles repeated on the Unit circle will make the system to be unstable.
9
Note: q=wT (rad)

Discrete Time System
h[n] Examples
1. The trapezoidal integration formula can be represented as an IIR digital filter represented by a difference equation given by
y[n] = y[ n – 1 ] + (1/2) { x[n] + x[ n – 1 ] }with y[-1] = 0. Determine the transfer function of the abovefilter.
Soln) Given, the difference equation representing trapezoidal integration
formula as:y[n] = y[ n – 1 ] + (1/2) { x[n] + x[ n – 1 ] }
Taking the z-transform of the above equation gives that:
)1(2
)1( )( ..
X(z)Y(z) H(z)
:is H(z)function transfer Therefore,
]X(z)[1 21 ]1)[( ..
} )( )( { 21 )( )(
1
1
11
11
-
-
--
--
-+
=
=
+=-
++=
zzzHei
zzzYei
zXzzXzYzzY
10

Discrete Time System
h[n]
2. Let H(z) be the transfer function of a causal stable LTI discrete-time system. Let G(z) be the transfer function obtained by replacing z-1 in H(z) with α + z-1/ 1+ α z-1. Show that G(1)=H(1) and G(-1)=H(-1).
Soln) Given that the transfer function G(z) is obtained from H(z)by replacing
1-
-11
1-
-11
z1z )()( i.e.
z1zby
aa
aa
++
==++ -- zzHZGz
11
z1z
by z replace
or
zz1
by z replace i.e.
1-
1-
aa
aa
++
++
a) To show G(1) = H(1)
)1()1
1()1(
1, zWhen z1z )()(
HHG
zzHZG
=++
=
=++
==
aa
aa
b) G(-1) = H(-1)
When z = -1,
H(-1)
)1
1( )1(
=--
=-a
aHG

Discrete Time System
h[n]
3. Determine the transfer function of a causal stable LTI discrete-timesystem described by the following difference equation:
y[n] = 5x[n] + 5x[n-1] + 0.4x[n-2] + 0.32x[n-3]- 0.5y[n-1] + 0.34y[n-2] + 0.08y[n-3]
Express the transfer function in a factored form and sketch its pole-zeroplot. Is the system BIBO stable?
Soln)The difference equation of a casual LTI discrete system is:y[n] = 5x[n] + 5x[n-1] + 0.4x[n-2] + 0.32x[n-3]
- 0.5y[n-1] + 0.34y[n-2] + 0.08y[n-3]
Taking z-transform of the above equation:
4)2.01(
7619.4)5.01(
6237.5)8.01(
0256.1)(..
08.034.05.0132.04.055
X(z)Y(z))(
:is H(z)function transfer The
]32.04.055)[(]08.034.05.0Y(z)[1
..
)(08.0)(34.0)(5.0-
)(32.0)(4.0)(5)(5)(
111
321
321
321321
321
321
-+
+-
+--
=
--++++
==
+++=--+
++
+++=
---
---
---
------
---
---
zzzHei
zzzzzzzH
zzzzXzzz
ei
zYzzYzzYz
zXzzXzzXzzXzY
12

Discrete Time System
h[n]
The system is stable since all the poles lie inside the unit circle
The pole zero plot of the transfer function using Matlab:
13

Discrete Time System
h[n]
4. Using z-transform methods, determine the explicit expression For the impulse response h(n) of a causal LTI discrete-time systemwhich develops an output y[n]=4(0.75)n µ[n] for an input x[n]=3(0.25)n µ[n].
Soln)
Given that the system response
for an input
n][4(0.75) y[n] nµ=
n][3(0.25) x[n] nµ=
Taking z transform of each of the equation, we get
)25.01(
13)(X and )75.01(
14 [z] 11 -- -=
-=
zz
zy
Therefore, the transfer function H(z) is:
[ ] ]1[(0.75)25.0][(0.75) 34 h[n]
)75.01(
25.0 - )75.01(
134
)75.01()25.01(.
34
)()( )(
1-nn
1
1
1
1
1
--=
úû
ùêë
é--
=
--
==
-
-
-
-
-
nn
zz
z
zz
zXzYzH
µµ
14

![Applications of Z-Transform in Signal Processing -Iyoga/courses/DSP/P7... · 2020. 3. 9. · -0.5y[n-1] + 0.34y[n-2] + 0.08y[n-3] Express the transfer function in a factored form](https://img.pdfslide.us/doc/110x75/609303b979286b42ae5d3f91/applications-of-z-transform-in-signal-processing-i-yogacoursesdspp7-2020.jpg)


![6.003 Lecture 6: Z Transform · Z Transform Z transform is discrete-time analog of Laplace transform. Z transform maps a function of discrete time n to a function of z. X(z)= x[n]z](https://img.pdfslide.us/doc/110x75/5e6f94456e2ffa7b6442a280/6003-lecture-6-z-transform-z-transform-z-transform-is-discrete-time-analog-of.jpg)