-
Seediscussions,stats,andauthorprofilesforthispublicationat:https://www.researchgate.net/publication/319932593
ApplicationsoftheVOLAFormatfor3DDataKnowledgeDiscovery
ConferencePaper·July2017
CITATIONS
2
READS
403
7authors,including:
Someoftheauthorsofthispublicationarealsoworkingontheserelatedprojects:
EoT(EyesofThings)Viewproject
Interest-point-basedhumanbodytrackingViewproject
JonathanByrne
Intel
29PUBLICATIONS212CITATIONS
SEEPROFILE
SamCaulfield
Intel
9PUBLICATIONS9CITATIONS
SEEPROFILE
LéonieBuckley
TrinityCollegeDublin
5PUBLICATIONS2CITATIONS
SEEPROFILE
XiaofanXu
TrinityCollegeDublin
7PUBLICATIONS9CITATIONS
SEEPROFILE
AllcontentfollowingthispagewasuploadedbyJonathanByrneon20September2017.
Theuserhasrequestedenhancementofthedownloadedfile.
https://www.researchgate.net/publication/319932593_Applications_of_the_VOLA_Format_for_3D_Data_Knowledge_Discovery?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_2&_esc=publicationCoverPdfhttps://www.researchgate.net/publication/319932593_Applications_of_the_VOLA_Format_for_3D_Data_Knowledge_Discovery?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_3&_esc=publicationCoverPdfhttps://www.researchgate.net/project/EoT-Eyes-of-Things?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_9&_esc=publicationCoverPdfhttps://www.researchgate.net/project/Interest-point-based-human-body-tracking?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_9&_esc=publicationCoverPdfhttps://www.researchgate.net/?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_1&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Jonathan_Byrne?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_4&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Jonathan_Byrne?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_5&_esc=publicationCoverPdfhttps://www.researchgate.net/institution/Intel?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_6&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Jonathan_Byrne?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_7&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Sam_Caulfield?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_4&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Sam_Caulfield?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_5&_esc=publicationCoverPdfhttps://www.researchgate.net/institution/Intel?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_6&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Sam_Caulfield?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_7&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Leonie_Buckley?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_4&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Leonie_Buckley?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_5&_esc=publicationCoverPdfhttps://www.researchgate.net/institution/Trinity_College_Dublin?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_6&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Leonie_Buckley?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_7&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Xiaofan_Xu4?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_4&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Xiaofan_Xu4?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_5&_esc=publicationCoverPdfhttps://www.researchgate.net/institution/Trinity_College_Dublin?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_6&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Xiaofan_Xu4?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_7&_esc=publicationCoverPdfhttps://www.researchgate.net/profile/Jonathan_Byrne?enrichId=rgreq-68fcbbaac9a192ca7c765bb078b0cdde-XXX&enrichSource=Y292ZXJQYWdlOzMxOTkzMjU5MztBUzo1NDA2MzAyNzY4MTY4OTZAMTUwNTkwNzcxMDU5NA%3D%3D&el=1_x_10&_esc=publicationCoverPdf
-
1
Applications of the VOLA Format for 3D DataKnowledge
Discovery.
Jonathan Byrne, Sam Caulfield, Léonie Buckley, Xiaofan Xu,
Dexmont Pena, Gary Baugh and David MoloneyComputer Vision and
Machine Learning Group, Movidius / Intel
Email: [email protected], [email protected],
[email protected],
[email protected],[email protected], [email protected],
[email protected]
Abstract—VOLA is a compact data structure that unifiescomputer
vision and 3D rendering and allows for the rapid cal-culation of
connected components, per-voxel census/accounting,CNN inference,
path planning and obstacle avoidance. Usinga hierarchical bit array
format allows it to run efficiently onembedded systems and maximize
the level of data compression.The proposed format allows massive
scale volumetric data to beused in embedded applications where it
would be inconceivable toutilize point-clouds due to memory
constraints. Furthermore, ge-ographical and qualitative data is
embedded in the file structureto allow it to be used in place of
standard point cloud formats.This work examines the reduction in
file size when encoding 3Ddata using the VOLA format and finds that
it is an order ofmagnitude smaller than the current binary standard
for pointcloud data.
Index Terms—Point Clouds, Embedded Systems, Auralisation,Deep
Learning, GIS.
I. INTRODUCTIONThe worlds of computer vision and graphics,
although
separate, are slowly being merged in the field of
robotics.Computer vision is taking input from systems, such as
lightdetection and ranging (LIDAR), structured light or
camerasystems and generating point clouds or depth maps of
theenvironment. This data then must be represented internally
forthe environment to be interpreted correctly. Unfortunately
theamount of data generated by modern sensors quickly becomestoo
large for embedded systems. An example of the amountof memory
required by dense representations is SLAMbench(kFusion) which
requires 512 MiB to represent a 5 m3 volumewith 1 cm accuracy [1].
A terrestrial LIDAR scanner generatesa million unique points per
second [2] and an hour long aerialsurvey can generate upwards of a
billion unique points.
The result of having such vast quantities of data is that itsoon
becomes impossible to process, let alone visualize thedata on all
but the most powerful systems. Consequently itis almost never used
directly. It is simplified by decimation,flattened into a DEM, or
meshed using a technique such asDelaunay triangulation or Poisson
reconstruction.
The original intention of VOLA was to develop a format
thatenabled an embedded system to process point cloud data intoan
internalized 3D model to easily navigate the environment.It has
since been applied to numerous applications, such asray-casting,
deep learning, auralisation, machine learning and3D Mapping. VOLA
has shown itself to be a compact yetversatile format. This paper
gives a summary of the differentapplications areas and the results
obtained.
II. RELATED RESEARCH
There exist several techniques for organizing point clouddata
and converting it to a solid geometry. Point clouds areessentially
a list of coordinates, with each line containingpositional
information as well as colour, intensity, number ofreturns and
other attributes. Although the list can be sortedusing the
coordinate values, normally a spatial partitioningalgorithm is
applied to facilitate searching and sorting the data.Commonly used
approaches are the the Octree [3] and theKD-Tree [4].
Octrees are based in three dimensional space and so
theynaturally lend themselves to 3D visualization. There are
ex-amples where the Octree itself is used for visualizing 3D
data,such as the Octomap [5]. Octrees are normally composed
ofpointers to locations in memory which makes it difficult tosave
the structure as a binary. One notable exception is theDMGOctree
[6] which uses a binary encoding for the positionof the point in
the octree. Three bits are used as a uniqueidentifier for each
level of the Octree. The DMGOctree usesa 32 or 64 bit encoding for
each point to indicate the locationin the tree to a depth of 10 or
20 respectively.
Another technique for solidifying and simplifying a pointcloud
is to generate a surface that encloses the points. A com-monly used
approach that locally fits triangles to a set of pointsis Delaunay
triangulation [7]. It maximizes the minimum anglefor all angles in
the triangulation. Triangular irregular networks(TIN) [8] are
extensively used in Geographical InformationSystems (GIS) and are
based on Delaunay triangulation. Oneissue with that approach is
that noise and overlapping pointscan cause the algorithm to make
spurious surfaces.
A more modern and accurate meshing algorithm is Poissonsurface
reconstruction [9]. The space is hierarchically parti-tioned and
information on the orientation of the points is usedto generate a
3D model. It has been shown to generate accuratemodels and it is
able to handle noise due to the combination ofglobal and local
point information. Poisson reconstruction willalways output a
watertight mesh but this can be problematicwhen there are gaps in
the data. In an attempt to fill areas withlittle information,
assumptions are made about the shape whichcan lead to significant
distortions. There are also problemswith small, pointed surface
features which tend to be roundedoff or removed by the meshing
algorithm.
Finally there are volumetric techniques encoding pointclouds.
Traditionally used for rasterizing 3D data for render-
-
2
VOLA OctreeImplementation Bit Sequence Pointer BasedTraversal
Arithmetic Modular PointerVariable Depth Yes YesDense Search
Complexity O(1) O(h)Sparse search complexity O(h) O(h)Embedded
System Support Yes NoLook Up Table (LUT) Support Yes NoEasily Save
to File Yes NoFile Structure Implicit ExplicitCacheable Yes
NoHierarchical Memory Structure No Yes
TABLE I: A comparison between VOLA and Octrees.
ing [10], the data is fitted to a 3D grid and occupancy of
apoint is represented using a volumetric element, or “Voxel”.Voxels
allow the data to be quickly searched and traversed dueto being
fitted to a grid. While it simplifies the data and maymerge many
points into a single voxel, each point will have arepresentative
voxel. Unlike meshing algorithms, voxels willnot leave out features
but conversely may be more sensitive tonoise. The primary issue
with voxel representations is that theyencode everything, including
open space. This means that thereis a cubic relationship between
the number of voxels that needto be stored and the volume
resolution. For example, if theresolution is doubled then the
memory requirements increaseby a factor of 8.
VOLA combines the hierarchical structure of the Octreewith
traditional volumetric approaches, enabling it to onlyencode for
occupied voxels. The approach is described indetail below.
III. THE VOLA FORMAT
VOLA is unique in that it combines the benefits of partition-ing
algorithms with a minimal voxel format. It hierarchicallyencodes 3D
data using modular arithmetic and bit countingoperations applied to
a bit array. The simplicity of thisapproach means that it is highly
compact and can be runon hardware with simple instruction sets. The
choice of a 64bit integer as the minimum unit of computation means
thatmodern processor operations are already optimized to handlethe
format. While octree formats either need to be fully denseto be
serialized or require bespoke serialization code for sparsedata,
the VOLA bit array is immediately readable withoutheader
information.
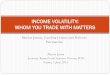
VOLA is built on the concept of hierarchically definingoccupied
space using “one bit per voxel” within a standardunsigned 64 bit
integer. The one-dimensional bit array thatmakes up the integer
value is mapped to three-dimensionalspace using modular arithmetic.
The bounding box containingthe points is divided into 64 cells and
if there are pointscontained within a cell the bit is then set to 1
otherwise it isset to zero. The result of the first division is
shown in Figure 1.
For the next level each occupied cell is assigned andadditional
64 bit integer and the space is further subdividedinto 64 cells.
Any unoccupied cells on the upper levels areignored allowing each
64 bit integer to only encode foroccupied space. The bits are again
set based on occupancyand appended to the bit array. The number of
integers in each
Fig. 1: Tree depth one, the space is subdivided into 64
cells.The occupied cells are shown in green.
Fig. 2: Tree depth two. Each occupied cell is subdivided into64
smaller cells
-
3
Fig. 3: Tree depth three. The process is repeated until
asufficiently granular resolution is obtained.
Fig. 4: Depth 1.
level can be computed by summing the number of occupiedbits in
the previous level. The resolution increases fourfold foreach
additional level as shown in figure 2
The process is repeated with each level increasing theresolution
of the representation by four until a resolutionsuitable for the
data is reached. This depends on the resolutionor points per meter
of the data itself.
A. Two Bits Per Voxel
While the basic VOLA format can give occupancy informa-tion in a
3D environment, it cannot store information aboutthe voxels. A
backward compatible variation of the format wasadopted in order to
add this functionality. The VOLA Model isessentially mirrored so
that each 64 bit block has an additional64 bit block appended to
it. The additional block contains theinformation related to that
volume. The information resolutionis less than the voxel resolution
but the additional overheadonly equates to an additional bit per
voxel. The result is that
Fig. 5: Depth 2.
Fig. 6: Depth 3.
Fig. 7: Depth 4.
-
4
the file size doubles but as it is already a fraction of the
sizeof the original point cloud, the difference is negligible.
The64 bits can be adapted to contain a variety of payloads, suchas
material properties, geographical information and
colourinformation.
This section has described the basic implementation ofthe VOLA
format and the adapted format for embeddinginformation about the
voxels. The following sections describethe applications that have
been built upon this work.
IV. AUDIOAuralisation is used to describe rendering audible
(imagi-
nary) sound fields[11]. For the purpose of JIT (Just In
Time)auralisation, the environment being modelled is
representedusing VOLA. The response being modelled depends on
twomain factors - how far the sound travels between source
andobserver, and by how much it is attenuated.
The distance travelled indicates how much the response willbe
delayed with respect to the source, and the attenuationindicates
how the power of the sound source is diminished.The attenuation is
determined by the medium that the soundrays travel through/reflects
off (e.g. through air or off a wall).Both the distance travelled
and the attenuation of the soundcan be obtained from the VOLA
model.
Using Pythagoras’ theorem, the distance between the soundsource
and an occupied voxel is calculated. This is repeated forthe return
distance between the same voxel and the observer.These two
distances are then combined as the total distancetravelled by the
sound ray and is known as an early reflector.
Currently only direct sound and early reflectors are takeninto
account as they contain the majority of the sound energyof the
acoustic response. These rays and their energies areshown in
figures 8a and 8b respectively. Direct sound rays aresound rays
that travel directly to the observer without reflectingoff any
surfaces/objects.
The reflection coefficients are stored in the second bitof
VOLA’s two per voxel representation, as described insection III-A.
This can be manually set for an entire scene(e.g. if it is know
that all the walls and floor are wooden).Manually measuring the
reflection coefficient of materials isa complex process[12],
however, CNNs can be trained todistinguish simple materials[13]
(e.g. wood, metal, carpet), andassign predetermined reflection
coefficients to voxels of thesematerials.
For optimisation, voxels that cause the same attenuationdue to
distance travelled and reflection coefficients are binnedtogether.
This is referred to as ”thresholding” the environment.Each of these
bins are combined to generate an FIR filterthrough which the sound
source is passed. The process ofconstructing this filter is shown
in figure 9. The responsefrom multiple sound sources can be
calculated simultaneouslythrough generating multiple filters.
An algorithm, SonifEye[14], implementing auralisation
asdescribed above is implemented on the Myriad 2[15] . Thesounds
source can be pre-recorded e.g. a musical recording,or can be
recorded using a microphone. The runtime for aural-ising a single
sound source in a 256 voxel cubed environmentis given in table
II.
(a) Ray reflections
(b) Energy of ray reflections
Fig. 8: Sound Rays
Fig. 9: JIT audio modelling
The user’s surrounding are often neglected when providingaudio
for VR. SonifEye allows for more realistic VR audio tobe generated
in real time, eliminating the need to store cannedaudio.
V. DEEP LEARNING AND CONVOLUTIONAL NEURALNETS.
Performing object recognition on 3D point-cloud occludedvolumes
depicting real-world scenes containing ubiquitousobjects is an
important problem in the computer vision field. It
Step Time (ms)Threshold Environment 820
Create Filter 0.3Apply Filter 4.05
TABLE II: SonifEye Step Timings for a 256 voxel cubedenvironment
for a sound source 1 second is length
-
5
presents multiple challenges, including the significant
memoryrequirements for these volumetric representations as well
asreal-time recognition of objects in mobile, power-constrainedor
autonomous conditions.
Convolutional Neural Networks (CNNs) have been shownto be
powerful classification tools for multiple real-worldcomputer
vision tasks, such as scene segmentation andlabelling[16], medical
imaging diagnosis[17], [18] and objectdetection in autonomous
driving[19], in many cases approach-ing near-human performance. As
CNNs take on new and morechallenging recognition tasks, they have
been increasing incomplexity, thus requiring larger datasets for
training. Thelack of readily available training data and memory
require-ments are two of the factors hindering the training
andaccuracy performance of 3D CNNs. Based on the previousworks [20]
[21], a voxelised point-cloud dataset was createdcontaining 10
different 3D objects associated with differentscenes in VOLA format
shown in Fig.10. This dataset can min-imize the memory footprint as
well as increase the efficiency ofCNN performance. In order to cope
with high computationalpower with low-power supply requirements and
low-energyconsumption levels for real-time applications, the CNN
modeltrained with our dataset is ported to a very low power and
lowcost Fathom NCS [22] based on Myriad2 MA2450 VPU [15]and can
perform inference in 11 ms.
Fig. 10: ModelNet10 [23] objects placed in different roomswith
voxelised representation in VOLA format.
In order to train the network on our 3D objects with scene,we
have developed a new architecture shown in Fig. 11. Theinput to the
network is 64 × 64 × 64 VOLA format objectwith scene shown in
Fig.10. There are 3 convolutional layers,1 fully connected layer
and a softmax layer to produce theoutput. We also add a dropout
layer after the third convo-lutional layer with drop rate of 0.5.
The first convolutionallayer produces 8 feature blocks with size
573, the secondand the third convolutional layer produces 16
feature blockswith size 503 and 433 respectively. After that we add
1 fullyconnected layer to produce 10 units and the final output
givesthe probability for different classes based on the input.
This3D CNN model is designed and trained using Caffe [24].
Theaccuracy achieved for the 3D CNN is shown in Table III.
VI. KFUSIONSimultaneous localisation and mapping (SLAM) is a
classic
computer vision problem which requires a significant amount
Fig. 11: 3D CNN architecture layout for Objects with
back-ground. The input is a 64× 64× 64 object in VOLA formatwith
each voxel represented by a single bit. The input passesthrough 3
convolutional layers and 1 fully connected layer.The kernels used
for convolutional layers are 8 × 8 × 8 withstride 1 which gives the
output feature blocks with size 573,503 and 433 from Conv1, Conv2
and Conv3 respectively. Theoutput from fully connected layer is 10
units.
Method AccuracyPointNet [25] 77.6%
3D ShapeNet [23] 84%OctNet[26] 90.1%
Our 3D CNN 91.3%VoxNet[27] 92%
TABLE III: Accuracy achieved for different existing CNNmodels
and our model. The existing CNN models are trainedand tested on
pure ModelNet10 objects where our 3D CNN istrained and tested on
voxelized point-clouds contain Model-Net10 objects with background.
(Higher percentage indicatesbetter performance).
of computational resource. Most SLAM solutions can becategorized
as either a dense or sparse approach. For sparsetechniques only a
subset of image/sensor features are trackedin order to map an
environment and localize the position andorientation of the sensor.
However for dense approaches themain goal is to create a compact
map with sufficient detail ofthe environment being captured.
KFusion[28] is a dense SLAM open source implementationof
Microsoft’s KinectFusion[29] algorithm. KFusion has beenported to
the Myriad 2 platform with the goal of using VOLAin the pipeline
for storing compact volumetric 3D data. Byusing VOLA, large maps
constructed by the algorithm willoccupy a smaller memory footprint
compared to the defaultdense voxel grid of truncated signed
distance function andweights. Figure 12 shows the hardware setup
for a live KFu-sion implementation running on Movidius’ Myriad 2
platform.A demonstration of KFusion running on the Myriad chip
isavailable online at [30].
VII. TERRESTRIAL SCALE POINT CLOUD MAPPING INREAL TIME.
Laser scan (LIDAR) surveys have been carried out overmost major
cities due to the high accuracy and speed of datacollection.
Furthermore the open data movement has meantthat many governments
have made this data publicly availablefor public use. Unfortunately
the size of the point cloudsgenerated from the scans is so large
(10 gigabytes up toa terabyte) that it is almost never used
directly. Convertingit to the VOLA format allows for the size of
the data to
-
6
Fig. 12: Live KFusion running on Myriad 2 platform.
Fig. 13: Height data embedded in geo-referenced VOLA data.
be massively reduced while still allowing it to be used
formapping and machine learning applications.
The format specification has been designed to be compatiblewith
terrestrial mapping applications. The point cloud data
isgeoreferenced using both the WGS84 coordinate system [31]and the
projected coordinate system that it was originallyrecorded in. This
allows for all data to be georeferenced whileminimising distortion
due to re-projection.
In order for the format to be used with standard
GISapplications, an approach was developed to embed
informationabout the voxels while minimizing memory usage.
Semanticinformation, such as color, classification, number of
returnsand height, is embedded in the data using the two bits
pervoxel technique. An example of this is given in figures 13and 14
which show the height data and the number of returnsfrom the LIDAR
scanner respectively.
VIII. EMBEDDED RAYCASTING
In autonomous applications, a compact and highly-detailedmap is
not useful unless the autonomous agent can meaning-fully interact
with it. One of the most fundamental interactionsis collision
detection. Accurate and high-performance collisiondetection is of
particularly high importance in applicationssuch as drones, where
collision at speed can result in damageto property and harm to
individuals. Common methods ofray/geometry intersection involve
spatial partitioning schemes
Fig. 14: LIDAR return data embedded in geo-referencedVOLA data.
The trees are highlighted in the dataset as theygenerate multiple
returns.
such as the KD-tree or octree as mentioned previously. Theoctree
is the most popular technique for geometry arrangedin regular
grids. I compares the VOLA format to octrees ina number of
scenarios. However, for certain architectures, theVOLA format
provides other significant improvements overthe octree.
A. Parallelism
In a parallel program, cores may have to wait longer onaverage
to perform writes and removes to a pointer-basedoctree when
compared to VOLA. This is because of thecascading memory
allocations and memory frees that wouldhave to be performed during
the critical section. In the worstcase VOLA would only require a
cascade of memory writes,resulting in less time spent waiting on
unlocks.
B. Cache-friendliness
A level in an octree uses pointers to indicate the occupancyof
the level below. On a 64-bit system, the pointer uses 8bytes of
memory where a single bit would suffice to representoccupancy. The
ratio of metadata (pointers) to data (voxels)is far lower in VOLA
because everything is a voxel. Thisresults in better cache
friendliness because voxel data doesnot compete with pointer data
for space in the cache.
C. Level of detail
VOLA supports similar level of detail to that of octrees.In an
octree, the number of voxels in the first level is 8 andthis number
increases by a factor of 8 each successive level.In VOLA, this
number is simply 64. This means the VOLAlevels of detail converge
on the full level of detail faster whilestill offering several
degrees of coarseness.
D. Data locality
Using heap-allocation for the octree can result in
highlyfragmented memory and no assumptions can be made about
-
7
Fig. 15: VOLA raycaster running on Movidius Fathom. Theraycaster
runs at 8 FPS.
the relative positions of data in memory. In VOLA, thelayout of
the voxels is totally deterministic and very compact.Additionally,
VOLA does not lose the ability to use MortonEncoding[32] to enhance
data locality. In situation where mul-tiple VOLA structures are
used in parallel (e.g. to store sub-sampled colour information in
addition to voxels), a relativeaddress jump can be made from one
VOLA structure to thesame point in the other.
E. Efficient Ray-casting
The above characteristics of VOLA result in high perfor-mance
ray-casting on amenable platforms. Efficient algorithmsexist for
ray/grid intersection tests[33]. These algorithms canbe further
optimised to make use of level of detail to skipa large number of
tests that would otherwise test known-empty space. Multi core
systems can use the extra cores tocast multiple rays in
parallel.
The Movidius Myriad 2 is a heterogenous VPU that fea-tures 12
vector processors and an on-chip addressable cachememory. Each
vector processor has a 128 KiB preferentialslice of the 2 MiB
on-chip memory which facilitates fast low-power access. Using VOLA,
each slice can comfortably storeits own copy of the top three
levels of detail of the VOLAdata structure. The remaining levels of
the structure are storedin DDR memory.
A realtime raycaster was implemented on the MovidiusFathom stick
as an example of the raycasting performance.The rays produce a
depth image which visualises the voxelsdirectly without producing
an intermediate data structure suchas a triangular mesh.
IX. CONCLUSIONSVOLA has proven to be a versatile and compact
format.
It has been used for applications as diverse as audio mod-
elling, machine learning, and storing georeferenced geo-data.It
allows for massive compression of data without
sacrificingfunctionality. The bit sequences are amenable for use
onembedded systems and have been applied to ray-casting
andSLAM.
A. Future WorkVOLA is now been developed so that any
information
can be automatically added and unpacked from the two bitper
voxel representation. This will allow data to be sent forspecific
applications for the same database. VOLA is alsobeing merged with
existing GIS data so that a curated trainingset can be developed
for training CNNs on real-world objects.
REFERENCES[1] C. D. Mutto, P. Zanuttigh, and G. M. Cortelazzo,
Time-of-flight cameras
and microsoft kinect (TM). Springer Publishing Company,
Incorporated,2012.
[2] L. Geosystems, “Leica scanstation p30/p40,” Product
Specifications:Heerbrugg, Switzerland, 2015.
[3] D. Meagher, “Geometric modeling using octree encoding,”
Computergraphics and image processing, vol. 19, no. 2, pp. 129–147,
1982.
[4] J. L. Bentley, “Multidimensional binary search trees used
for associativesearching,” Communications of the ACM, vol. 18, no.
9, pp. 509–517,1975.
[5] A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W.
Burgard,“Octomap: An efficient probabilistic 3d mapping framework
based onoctrees,” Autonomous Robots, vol. 34, no. 3, pp. 189–206,
2013.
[6] D. Girardeau-Montaut, Change detection on three-dimensional
geomet-ric data. PhD thesis, T e l e com ParisTech, 2006.
[7] J.-D. Boissonnat, “Geometric structures for
three-dimensional shaperepresentation,” ACM Transactions on
Graphics (TOG), vol. 3, no. 4,pp. 266–286, 1984.
[8] T. K. Peucker, R. J. Fowler, J. J. Little, and D. M. Mark,
“Thetriangulated irregular network,” in Amer. Soc. Photogrammetry
Proc.Digital Terrain Models Symposium, vol. 516, p. 532, 1978.
[9] M. Kazhdan, M. Bolitho, and H. Hoppe, “Poisson surface
reconstruc-tion,” in Proceedings of the Fourth Eurographics
Symposium on Ge-ometry Processing, SGP ’06, (Aire-la-Ville,
Switzerland, Switzerland),pp. 61–70, Eurographics Association,
2006.
[10] J. F. Hughes, A. Van Dam, J. D. Foley, and S. K. Feiner,
Computergraphics: principles and practice. Pearson Education,
2014.
[11] M. Kleiner, B.-I. Dalenbäck, and P. Svensson,
“Auralization-anoverview,” Journal of the Audio Engineering
Society, vol. 41, no. 11,pp. 861–875, 1993.
[12] D. Markovic, K. Kowalczyk, F. Antonacci, C. Hofmann, A.
Sarti, andW. Kellermann, “Estimation of acoustic reflection
coefficients throughpseudospectrum matching,” IEEE/ACM Transactions
on Audio, Speechand Language Processing (TASLP), vol. 22, no. 1,
pp. 125–137, 2014.
[13] S. Bell, P. Upchurch, N. Snavely, and K. Bala, “Material
recognition inthe wild with the materials in context database,” in
Proceedings of theIEEE conference on computer vision and pattern
recognition, pp. 3479–3487, 2015.
[14] L. Buckley, S. Caulfield, and D. Moloney, “Mvecho -
acoustic responsemodelling for auralisation,” in 2016 IEEE Hot
Chips 28 Symposium(HCS), p. 1, Aug 2016.
[15] B. Barry, C. Brick, F. Connor, D. Donohoe, D. Moloney, R.
Richmond,M. O’Riordan, and V. Toma, “Always-on vision processing
unit formobile applications,” IEEE Micro, vol. 35, no. 2, pp.
56–66, 2015.
[16] A. Karpathy and L. Fei-Fei, “Deep visual-semantic
alignments forgenerating image descriptions,” in Proceedings of the
IEEE Conferenceon Computer Vision and Pattern Recognition, pp.
3128–3137, 2015.
[17] A. Prasoon, K. Petersen, C. Igel, F. Lauze, E. Dam, and M.
Nielsen,“Deep feature learning for knee cartilage segmentation
using a triplanarconvolutional neural network,” in International
conference on medicalimage computing and computer-assisted
intervention, pp. 246–253,Springer, 2013.
[18] H. R. Roth, L. Lu, A. Seff, K. M. Cherry, J. Hoffman, S.
Wang, J. Liu,E. Turkbey, and R. M. Summers, “A new 2.5 d
representation for lymphnode detection using random sets of deep
convolutional neural networkobservations,” in International
Conference on Medical Image Computingand Computer-Assisted
Intervention, pp. 520–527, Springer, 2014.
-
8
[19] C. Chen, A. Seff, A. Kornhauser, and J. Xiao, “Deepdriving:
Learningaffordance for direct perception in autonomous driving,” in
Proceedingsof the IEEE International Conference on Computer Vision,
pp. 2722–2730, 2015.
[20] X. Xu, D. Corrigan, A. Dehghani, S. Caulfield, and D.
Moloney, “3d ob-ject recognition based on volumetric representation
using convolutionalneural networks,” in International Conference on
Articulated Motionand Deformable Objects, pp. 147–156, Springer,
2016.
[21] X. Xu, A. Dehghani, D. Corrigan, S. Caulfield, and D.
Moloney, “Con-volutional neural network for 3d object recognition
using volumetricrepresentation,” in Sensing, Processing and
Learning for IntelligentMachines (SPLINE), 2016 First International
Workshop on, pp. 1–5,IEEE, 2016.
[22] “Movidius announces deep learning accelerator and
fathomsoftware framework.”
https://www.movidius.com/solutions/machine-vision-algorithms/machine-learning.
[23] Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang, and J.
Xiao, “3dshapenets: A deep representation for volumetric shapes,”
in Proceedingsof the IEEE Conference on Computer Vision and Pattern
Recognition,pp. 1912–1920, 2015.
[24] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R.
Girshick,S. Guadarrama, and T. Darrell, “Caffe: Convolutional
architecture forfast feature embedding,” in Proceedings of the 22nd
ACM internationalconference on Multimedia, pp. 675–678, ACM,
2014.
[25] A. Garcia-Garcia, F. Gomez-Donoso, J. Garcia-Rodriguez, S.
Orts-Escolano, M. Cazorla, and J. Azorin-Lopez, “Pointnet: A 3d
convolu-tional neural network for real-time object class
recognition,” in NeuralNetworks (IJCNN), 2016 International Joint
Conference on, pp. 1578–1584, IEEE, 2016.
[26] G. Riegler, A. O. Ulusoys, and A. Geiger, “Octnet: Learning
deep 3drepresentations at high resolutions,” arXiv preprint
arXiv:1611.05009,2016.
[27] D. Maturana and S. Scherer, “Voxnet: A 3d convolutional
neural networkfor real-time object recognition,” in Intelligent
Robots and Systems(IROS), 2015 IEEE/RSJ International Conference
on, pp. 922–928,IEEE, 2015.
[28] L. Nardi, B. Bodin, M. Z. Zia, J. Mawer, A. Nisbet, P. H.
J. Kelly,A. J. Davison, M. Luján, M. F. P. O’Boyle, G. Riley, N.
Topham,and S. Furber, “Introducing SLAMBench, a performance and
accuracybenchmarking methodology for SLAM,” in IEEE Intl. Conf. on
Roboticsand Automation (ICRA), May 2015. arXiv:1410.2167.
[29] R. A. Newcombe, S. Izadi, O. Hilliges, D. Molyneaux, D.
Kim,A. J. Davison, P. Kohli, J. Shotton, S. Hodges, and A. a.
Fitzgibbon,“Kinectfusion: Real-time dense surface mapping and
tracking,” in IEEEISMAR, IEEE, October 2011.
[30] “Raycaster running on the myriad demo video.”
http://www.youtube.com/watch?v=-LHpTfX4cIsg.
[31] B. L. Decker, “World geodetic system 1984,” tech. rep.,
DTIC Docu-ment, 1986.
[32] G. M. Morton, A computer oriented geodetic data base and a
newtechnique in file sequencing. International Business Machines
CompanyNew York, 1966.
[33] J. Amanatides and A. Woo, “A fast voxel traversal algorithm
for raytracing.” Accessed: 2017-06-70.
View publication statsView publication stats
https://www.movidius.com/solutions/machine-vision-algorithms/machine-learninghttps://www.movidius.com/solutions/machine-vision-algorithms/machine-learninghttp://www.youtube.com/watch?v=-LHpTfX4cIsghttp://www.youtube.com/watch?v=-LHpTfX4cIsghttps://www.researchgate.net/publication/319932593
IntroductionRelated ResearchThe VOLA FormatTwo Bits Per
Voxel
AudioDeep Learning and Convolutional Neural
Nets.KFusionTerrestrial Scale Point Cloud Mapping in Real
Time.Embedded RaycastingParallelismCache-friendlinessLevel of
detailData localityEfficient Ray-casting
ConclusionsFuture Work
References



![AutomatedSecurityAnalysisof InfrastructureClouds · In recent development, Cisco now provides a virtual switch implemen- tation (Cisco Nexus 1000V series [Cis10]), which unifies](https://img.pdfslide.us/doc/110x75/5f60725fb9ac90218e5efc2f/automatedsecurityanalysisof-infrastructureclouds-in-recent-development-cisco-now.jpg)