Embed Size (px)
Citation preview

Appendix. Vectors and Vector Calculus
Addition and Subtraction of Vectors
Physical quantities possessing both magnitude and direction can be described mathematically as vectors. A vector can be visualized as an oriented line segment (an arrow). Vectors can be added (and subtracted) to form other vectors, and they can be multiplied by real numbers (see the figure below).
-0
b 3b
The Dot Product, a· b
Let a be a vector with length a, and b be a vector with length b. The dot product a· b, also known as the scalar product, is defined by
a· b == abcos(a, b),
where cos(a, b) denotes cosine of the angle between the two vectors. Note that no coordinate system is involved in the definition of the scalar product.
The value of the scalar product does not depend on the orientation of the angle (a, b) (why?). From this, we see that
a·b=b·a.
The scalar product is commutative. If a . b = 0, we say that the vectors are orthogonal. And, since cos 0 = 1, we have that a· a = a2 ; we often use the

434 Appendix. Vectors and Vector Calculus
notation a· a = 1 a 12. The vector ea == a/a is a unit vector, Le., a vector of length 1, in the direction of a. We can divide vectors with a number, but not vice versa - the scalar product has no inverse. The equation a . x = c thus has no unique solution for the vector x.
k
We often employ the set (i,j, k) of three unit vectors. These are unit vectors, i· i = j . j = k· k = 1, directed along the axis of a cartesian coordinate system, and mutually orthogonal: i . j = j . k = k . i = O.
An arbitrary vector a can be written as a combination of the three unit vectors:
The three numbers, ax, ay and az are called respectively the x, y, and the z coordinates of the vector a. We have that ax = a . i, ay = a . j and az = a· k. We identify a vector with its coordinates, writing a = (ax, ay, az ).
Expressed in terms of coordinates, a± b = (ax±bx , ay±by, az±bz ), and ka = (kax , kayk, kaz), where k is a constant. Expressed in terms of its coordinates, the length of a vector a is given by
a = ra.-a = va; + a~ + a~ ,
and the unit vector in the direction of the vector a thus has coordinates

Appendix. Vectors and Vector Calculus 435
, ........ I ~~
............. ~'
The Cross Product, a X b
Let a be a vector with length a, and b be a vector with length b. The cross product, also known as the vector product, is defined as
a x b == absin(a, b)n(a, b)
where n( a, b), is a unit vector giving the direction of a x b according to the following right-hand rule:
To find the direction of the cross product, place your right hand such that the fingers are in the direction of the first vector a and the palm of your hand is towards the second vector b. The direction of a x b is then perpendicular to the plane spanned by a and b, and in the direction of your thumb.
axb
Note that the result of the multiplication this time is a new vector, not a number, and the result does depend on the relative orientation between the vectors a and b. We employ no coordinate system, but an orientation convention (right handed in the present case). The angle between the vectors a and b is now the smallest angle through which one can turn the vector a until it is aligned with b. That angle is always between 0 and 1800 • If we interchange a and b, the angle is unchanged, but the right hand rule makes the vector n(b, a) point opposite the vector n(a, b). Consequently,
b x a = -a x b,
so the vector product is anti-commutative. If b is along the direction of a, sin(b, a) = 0, so that, in particular, a x a = 0 .

436 Appendix. Vectors and Vector Calculus
In a coordinate system with orthonormal vectors (i,j, k), we can find the coordinates for a x b in terms of the coordinates of a and the coordinates of b.
i x j k
~ jxk = 1 J
kxi j
Note: the vectors i, j, and k are oriented in such a way that they form the basis of a right-handed coordinate system.
Using the above formulae, and the anti-commutative law, one obtains the cartesian coordinate expression for the cross product:
axb (axi + ayj + azk) x (bxi + byj + bzk)
(aybz - byaz)i + (azbx - bzax)j + (axby - bxay)k.
Briefly,
An important formula which we shall use several times, and which can be verified by direct (and repeated) use of the coordinate expression for the vector product, is the so called "bac-cab" formula:
a x (b xc) = b( a . c) - c( a . b)
The scalar and vector products give rise to a number of similar identities that can be verified by checking the coordinate expressions of both sides of the equation. Below we list just a couple of these:
a . (b xc) = b . (c x a) = c . (a x b) ,
(a x b) . (c x d) = (a· c)(b· d) - (a· d)(b· c).
Vector Calculus
Consider a vector r which is the position vector for a particle P (see the figure below). Suppose that r has coordinates (x, y, z) in some cartesian coordinate system:
r = xi + yj + zk .
If the particle P is in motion relative to the coordinate system, the vector r varies with time in such a way that the coordinate values (x(t), yet), z(t)) are

Appendix. Vectors and Vector Calculus 437
differentiable functions of time. We define the time derivative of the vector r to be
The vector v == dr / dt is called the velocity of the particle P relative to the chosen coordinate frame. The vector a == dv / dt = d2r / dt2 is called the acceleration of the particle P relative to the chosen coordinate frame.
dv d2r a=-=-=
- dt dt 2
dr dt
We now consider the particular case of motion confined to a plane. Suppose the vector r is the position vector for a particle moving within the
plane. The set (x, y) of cartesian coordinates specify the vector r in the sense that r = xi + yj. We shall now introduce another set of mutually orthogonal unit vectors, (en eo).
The vector e r is the unit vector in the direction of r, and eo is perpendicular to e r and in the direction of increasing e (see the figure). The two direction vectors are known when e is known.

438 Appendix. Vectors and Vector Calculus
If the position of the particle changes with time, r = ((dx/dt), (dy/dt)) and r = ((d2x/dt2), (d2y/dt2)) are the cartesian coordinates of the velocity vector v and acceleration vector a, respectively.
What are the coordinates of the vectors v and a expressed by e r and eo? We need to know how the vectors e r and eo change with time. In cartesian coordinates these unit vectors are given by
e r ( cos 8, sin 8) ,
eo (- sin 8, cos 8) .
By differentiation with respect to time we get
der . -=er dt
B( - sin 8, cos 8) ,
deo . -=eo dt
B( - cos 8, - sin 8) .
The direction vectors thus change with time according to
er Bee, eo -Ber .
This result can also be seen geometrically by inspection of the figure. The unit vectors change in direction, but not in magnitude.
For the position, velocity and acceleration we obtain by differentiation:
r r(t)er ,
r r(t)er + r(t)er ,
r r(t)er + 2r(t)er + r(t)e~ .
By using the formulae for er and ee, and rearranging, we finally get
v
a
The polar coordinates of the velocity and the acceleration vectors are consequently
(r,rB) = (~:,r~~)
(r-rB2,2rB+re) = (~:~ -r (~~y , ~! (r2~~)) .

Selected References
[1.) Born M. (1962): Einstein's Theory of Relativity, Dover Publications, New York [2.) Born M. (1949): Natural Philosophy of Cause and Chance, The Clarendon
Press, Oxford [3.) Feynman R. P., Leighton R. B. and Sands M. (1963): The Feynman Lectures
on Physics (vol.1), Addison-Wesley, Massachusetts [4.) French A. P. (1971): Newtonian Mechanics, W. W. Norton, New York [5.) Goldstein H. (1980): Classical Mechanics (2nd ed.), Addison-Wesley, Mas
sachusetts [6.) Kittel C., Knight W. D. and Ruderman M. A. (1973): Berkeley Physics Course
(vol. 1), McGraw-Hill, San Francisco [7.) Newton 1. (1686): Philosophire Naturalis Principia Mathematica, (English
translation by Motte A. 1729), University of California Press, Berkeley and Los Angeles (1962)
[8.) Guckenheimer J. and Holmes P. (1986): Nonlinear Oscillations, Dynamical Systems and Bifurcations of Vector Fields, Springer, Berlin
[9 .) Ott E . (1993): Chaos in Dynamical Systems, Cambridge University Press, Cambridge
[10.) Wiggins S. (1990): Introduction to Applied Nonlinear Dynamical Systems and Chaos, Springer, Berlin

Answers to Problems
Chapter 1
1.1 (1) w = 33.02 s-l. Between the hand and the first mass (2) No
1.2 (1) M = 6.48 X 1023 kg (2) T = 684 days
1.3 8=Mg 1.4 (1) 8 1 = m(lw2:,j29) , 82 = m(lw2,;,j2g)
(2) w2 :::- ,;2g/l 1.5 v = y'Mgr/m 1.6 (1) 8 = mlw2
(2) cos()= g/lw 2
(3) sin () = 0
1.7 (1) 8 = ~ e~2 + V39), R = ~ (g - ,?lw2) (2) w2 = 2g/V3l .
1.8 (1) v = (J6, 2,,;2) (2) v = 2V3 (3) j3 = 54.7° (4) 'Y = 65.9°
1.9 70.5° 1.10 t=~s, d=(~,-~,O)m 1.12 (1) aT = 4.9 ms- 2 , aN = 0
(2) w = e = 0, jj = w = 7 s-2 (3) 8 = 4.24 N
Chapter 2
2.1 Ve = 5.03 X 103 ms- 1 , Ve = 2.38 X 103 ms- 1
2.2 (1) h = 22.5 m (2) 42.9 m
2.3 a=g/9,8=2.18N 2.4 f = m~MF

442 Answers to Problems
2.5 tanB> JL 2.6 (1) dry ~ 174.6 kmh- 1 iey ~ 87.1 kmh- 1
(2) rmax = 4.4 em 2.7 (1) JL = tan CPo
(2) F=~ V1+J.t 2
2.8 (1) dmax = 4.9 em (2) Yo = 4.9 em (3) a = g, upwards
2.9 Hint: K(.:::h1 + .:1x2) = k2.:1X2; k1.:1x1 = k2.:1x2 T - 2 M(kl +k2)
- 1r klk2
2.10 (1) F = ~z (2) F(r) = ~~2 (L2 _ r2)
2.11 (1) VMoon/Vesc = Jl - 1/60 = 0.9916 (2) Vmax ~ 42 kms-1 + 30 kms-1 = 72 kms- 1
2.12 F = (m2/m1)(M + m1 + m2)g 2.13 (1) a = (1/3)g
(2) S = 70 kg = 686 N 2.14 v = 331.9 ms- 1
2.15 B = 45° 2.16 (1) J=3(Mg/L)S
(2) J = 3Mg 2.17 (1) u = M"'.;.m Vo
(2) T = J.t9(1~m/M) _ 1 v6
(3) D - "2 IJ-g(1+m/M)
2.18 (1) F = pau2
(2) F = 9000 N (3) 27 m (4) F = pa(u - v)2
2.20 (1) U1 = ::;:~v (2) U2 = m2.;'M V
(3) J = (~~ki)2' r = l+~/M (4) J = ;2
2.21 v = ;;~m Vo 2.22 (1) JL = 2mg/Vrel ~ 26 kgs- 1
(2) b = g/Vrel ~ 3.3 X 10-3 s-1
2.23 F = JLV
Chapter 3
3.1 (1) 11.4 kg* = 111.7 N

(2) 26.4 kg* = 258.7 N (3) 84.3 kg* (4) 55.7 kg*
Chapter 4
4.1 x'(t') = 5t,2 + 4 v' x(t') = lOt' m s-1
a'x = ax = 10 ms- 2
Chapter 5
5.1 (1) v = w x r = 211"(2, -4.;2,2.;2) ms- 1
Answers to Problems 443
(2) a = w x (w x r) = 411"2(12.;2, -4, -20) ms-2
5.2 a = R.w2 = 3.3 X 10-2 m S-2
Chapter 6
6.1 Cork (floats) to the left, lead (sinks) to the right. 6.2 a = g/p,
6.3 (2) T = 211"/f 6.4 T = 84.4 min 6.5 T = 84.4 min 6.6 d = 2.66 mm, east 6.7 (1) W = ..jg/p,R
(2) v = 8.6 ms- 1
6.8 (1) Centrifugal force: mw2p. Coriolis force: 2m (v x w) (2) Xo = ~..j p,2g2 - 4V2W2
6.9 () = 30° 6.10 (1) Wo = y'f7"(g-:"/r--'-)-ta-n-"()
(2) W = 211"v w2 > !l. sin O+y c,:,s 0 , - r CosO-J.LsmO
(3) p,-l = tan ()max
6.11 (1) w = (O,wcosP,-wsinp) (2) mx = -2mwysinp
my = 2mwxsinp (3) y = 10.4 m
6.13 Llt = 2(M~:)J.Lg 6.14 T = ws7nq,

444 Answers to Problems
Chapter 8
8.1 31.9 m 8.2 59.6 x 103 ms-1 :::::: 60 kms- 1
8.3 cosO=~ 8.4 (1) Vo = 7.9 kms- 1
(2) to = 7rJR/g = 42.2 min mv2
8.5 (1) R = 7 - mg(2 - 3cosO) (2) 0 = 60° (3) F = 4mg (4) 0 = 45°
8.6 (1) h = R/2 (2) F = 4mg, horizontal
8.7 (1) To = (1/2)mgL (2) U = n!l..;gr, v = ~~~..;gr, q = (n!1)2 (3) n --+ 00, q --+ 0, reflection from infinite mass.
(4) cos 00 = 1-! (~~~)2 (5) n --+ 00 cos 00 --+ 1/2
8.8 hmax = a + l2/(27r2a)
Chapter 9
9.1 (1) ill = vVmfk (2) ill = vv (M~'::,)k
9.2 x = D MAf.-m
9.3 (1) d = ILV Vi--'( m""-+-p.-)-( M-M-+-m-+-P.)-k
(2) T = T/4 = (7r/2) In/k , n = ;:++:1~ (3) interchange M and m.
9.4 (1) S = 2~9 (m';'M) 2 v2
(2) ilp:::::: 1 kgms- 1 , ilP:::::: 720 kgms- 1
9.5 Highest when the people jump off one by one, as described in (b) 9.6 d = 18.1 m 9.7 (1) U = M"':-mv:::::: :v
(2) P = mv (3) V - m V ~ m V eM - 2M+m ~ 2M
(4) K = !(2M + m)v6M (5) E - 1 m 2 v 2 ~ 1 m 2 2
- 2M+m ~ 2Mv (6) ill = "'';kvM
(7) T = 27rJM/2k

9.8 v = J2ghM;;.m 9.9 (1) YCM = ~gt2
(2) a(l) = 2g a(2) = 0
(3) z = (L/2) + (mg/2k) cos )2k/m t
Chapter 11
11.1 T = 27r/fi :=:::! 1.1 s
11.2 (1) T = 27rJR2/g2iL2
(2) T = 27r J R2 /g~L2 11.3 (1) TI = ~(2M + m)l2wr
(2) W2 = 2AftrwI, T2 = TI (1 + 2~) (3) W3 = WI, T3 = TI
(4) v = lWI)l + 2~ 11. 4 (1) CM falls along the vertical.
(2) T = ~ML2e2 (sin2 0 + t) u = -Mg~ (1 - cosO)
(3) . - . 0 3gL(I-cos 8) Y - sm 4-3cos28
11.5 (1) VCM = ~ (2) T = t~ (1 + 12b) (3) OC = L 2 /12d; below 0
d ~ L/6 ( ) m,fiih
11.6 1 U = 2M+m+I/r2
(2) Q h 2M+I/r2 = mg 2M+m+I/r2
11.7 (1) v = 3:::!~ (2) S = (1/2)l, d = (3/2)l
Chapter 12
12.1 (1) VCM = ¥ 4Mm;3m
(2) Vrn = .;r2'-(M....:+:.c:m....:)..::.cga"":(-ct,;:=-2;--I-)(-4M-+-3m-)
12.2 (1) v = 5.4 ms- I
(2) v = 4.4 ms- I
12.3 a = (mg/Mr) sin 00
12.4 h = (3/2)r
Answers to Problems 445

446 Answers to Problems
12.5 to = 7r fIT :::::: 50 min.
12.6 (1) t = ~ Vo l' 7/"9
(2) D = 12~ 49/"9
(3) W = ~MV02 12.7 J1min = 2a/7g 12 8 mvo
. W = MR+2mR
12.9 F = lMg, upwards. 12.10 (1) Wo = ~ ;:;r
(2) v = (2M/m)JgL/3 (3) F1 = ~Mg
(4) F2 = ! 'it fii (5) ..::1t« T, T = 27r I¥i
12.11 (1) VCM = v/2 (2) w = 6v/5L (3) ..::1T = (1/10)Mv 2
(4) d = (2/3)L 12.12 (1) (p = (39/ L)(sinOo - sinO)
(2) sin 01 = (2/3) sin 00
(3) rCM = (1/3)y'gL 12.13 (1) F1 = (1/28)Mg
(2) F2 = (41/14)Mg (3) h = (7;22
- !) L
Chapter 13
M1'3 W 2 13.1 R=~+Mg
13.2 (1) ..::10 = 2r;:;;0f :::::: 0.04 rad :::::: 2°
(2) ..::1t«.J2h19:::::: 1/3 s
13.3 (1) D = JI21;~/4 (2) FB = !m [g + W 2 + r: won]
Fe = !m [g + w2 - 1': won] 13.4 l/ = wo/27r = 1O.8s- 1
Chapter 14
14.1 (1) Vo = 11.2 kms- 1 (independent of 0)
Answers to Problems 447
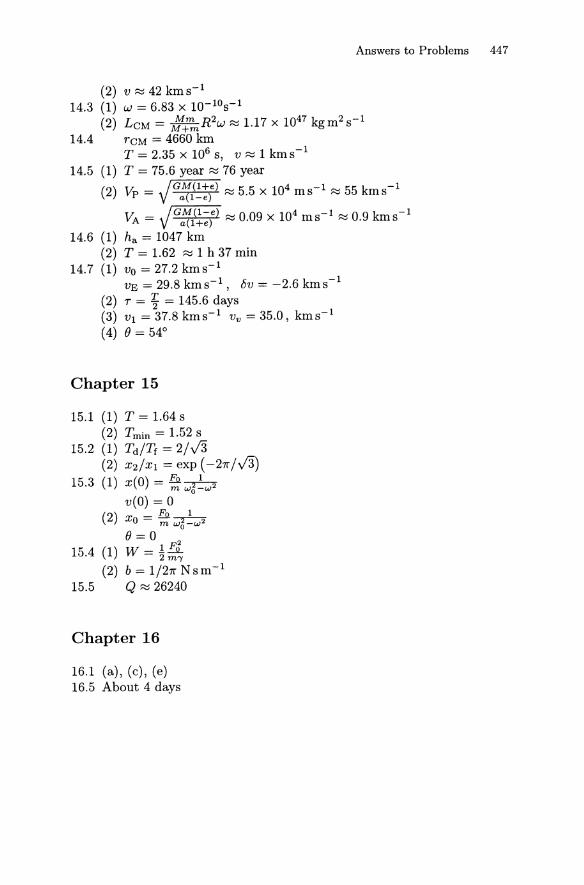
(2) v ~ 42 kms- 1
14.3 (1) w = 6.83 X 1O- lOs- 1
(2) LCM = 11+":nR2w ~ 1.17 X 1047 kgm2 s- 1
14.4 rCM = 4660 km T = 2.35 X 106 s, V ~ 1 kms- 1
14.5 (1) T = 75.6 year ~ 76 year
(2) Vp = C:[P!)e) ~ 5.5 x 104 ms- 1 ~ 55 kms- 1
V CM(I-e) ~ 0 09 104 -1 ~ 0 9 k -1 A = a(l+e) ~ . x ms ~. ms
14.6 (1) ha = 1047 km (2) T = 1.62 ~ 1 h 37 min
14.7 (1) Vo = 27.2 kms- 1
VE = 29.8 kms- 1 , 8v = -2.6 kms- 1
(2) T = t = 145.6 days (3) VI = 37.8 kms- 1 Vv = 35.0, kms- 1
(4) e = 54°
Chapter 15
15.1 (1) T = 1.64 s (2) T min = 1.52 s
15.2 (1) Td/Tf = 2/../3 (2) X2/Xl = exp (-27r/../3)
15.3 (1) x(O) = ~ w2~w2 a
v(O) = 0 (2) Xo = Fo~
m wo-w
e=o 15.4 (1) W = ! fl. 2 ml'
(2) b = 1/27r Nsm- 1
15.5 Q ~ 26240
Chapter 16
16.1 (a) , (c), (e) 16.5 About 4 days

Index
Absolute space 30, 155 Absolute time 30 Acceleration 29 - absolute 103 - centripetal 107 - comoving 104 - Coriolis 104 - of gravity 11 -- varition with latitude 118 Action-reaction 29 Andromeda 83 Angular momentum - around CM 228 - conservation of 253 - definition 219 - for a system of particles 224 - referred to various points 256 - Theorem 219 Angular velocity vector 95 Aphelion 232 Aristotle 1 Asteroids 429 Astronomical unit (AU) 53, 351 Asymmetry 159 Asymmetry of nature 186 Attractor 426 - strange 426 Atwood machine 41, 262
Ballistic pendulum 206 Bay of Fundy 125 Bifurcation 421, 423 Binding energy 183 Brahe 1, 345
Celestial sphere 345 Center of gravity 227 Center-of-mass (CM) theorem 193,
195 Center-of-mass frame 197 Central force 221 Central force field 170
Centrifugal force 116, 160 Centrifugal potential energy 232, 366 Centripetal acceleration 107 Chaotic oscillator 427 Circular motion 12 Closed system 56, 195 CM of solar system 371 Collision approximation 204, 206, 280 Communication satellite 13 Comoving velocity 103 Conic section 352, 374 Conservation law - for angular momentum 221 - for mechanical energy 188 - for momentum 54 Conservative force 52, 169 Copernicus 1, 346 Coriolis force 128, 138 Coupled differential equations 46 Critical damping 394 Cyclotron radius 45
Damped oscillations 392 Deterministic equntions 299, 411 Dimensional analysis 20 Dot product 433 Double stars 370 Duffing equation 424
Earth - bulging of 120 - rotation of 98 Eccentricity 352 Effective potential 232, 366 Eigenvalues 327 Einstein 110, 155, 162 - box 111 Elastic collision 56 Elastic force 34 Ellipse 352 Elliptic function 418 Energy 167

450 Index
- conservation of 172 - of Kepler orbits 363 Epicycles 3 Equation of motion 31 Equilibrium point 415 Equivalence principle of mechanics
109 Escape velocity 54 Euler equations 328, 330 Exact differential 174
Fictitious forces 108, 164 Field strength 180 Force 29 - constant 34 Forced oscillations 396 Forces - external and infernal 194 - tidal 121 Foucault pendulum 137 Frequency 36 Frequency characteristics 400 Friction 38, 40 - rolling 288 Frictionless curve 181
Galilei transformation 84 Galileo 1, 90 -laws 2 Geocentric reference frame 98, 122 Gradient 174 Gravitational constant 10, 17 Gravitational field 9 - around a homogeneous sphere 175,
179 Gravitational mass 73 Gravitational potential 180 Gravity 9 11
Harmonic oscillator 33, 385 - energy in 386 Heliocentric frame 85, 98, 101 Hohman orbit 378 Homogeneous gravitational fields 114 Hooke's law 34 Hoop 421 Horizontal throw 14 Hyperbola 352
Impetus 1 Impulse 55, 168 Inelastic collision 56, 202 Inertia - arm of 291
- in rotational motion 313 -law of 27 - moment of 240 - tensor 321 Inertial frame 31 - global 137 - local 136, 137 Inertial mass 74 Invariance 158
Konig's theorem 198 Kepler 1, 346 -laws 4 Kinetic energy 51, 167 - of a rotating rigid body 330 Kirkwood gaps 430
Lagrange 430 Liapunov exponents 427 Libration curves 417 Lorentz 44 - curve 405 - force 44
Mach 120, 162 Magnetic field 44 Map 427 Mathematical pendulum 115 Mechanical energy 52, 172 Milky Way 83 Moment of inertia 240 - calculation of 245 - circular disk 246 - homogeneous rod 246 - rectangular plate 249 - solid sphere 248 - spherical shell 247 Monkey 226
Newton - bucket
1,120 142
- experiment 76 -laws 27-31 North Star 342 Nutation 336
Opposition 347 Ordinary differential equation -linear 412 -- homogeneous 413 - nonlinear 412

Parabola 352 Parallel axis theorem 241 Particle 31 Pendulum 115, 182 Perihelion 232 Period of oscillation 75 Perpendicular axis theorem 242 Phase space 414 Physical pendulum 263 Physical reality 159 Pitch of a helix 47 Poincare 426 Polar coordinates 355 Potential energy 52, 167, 171 - calculation of 174 - due to electric forces 183 - effective 232 Potter's wheel 226 Power 168, 266 - in rotation of a rigid body 254 Precession 107 - of the Earth 342 - regular 319 Principal coordinate system 327 Principia 1
Q-value 403
R!ilmer 350 Reaction 29 Reduced mass 368 Relativity principle of mechanics 87,
159 Resonance 398 Retrograde motion 342 Right-hand rule 435 Right-handed coordinate system 436 Rigid body 193, 237 Roche limit 126 Rocket propulsion 57 Rolling 289 Rotation
Index 451
- around a fixed axis 243 - of the Earth 97 - vector 238
Satellite 78 Saturn 127 Scalar product 433 Second law of thermodynamics 187 Semi-major axis 355 Semi-minor axis 355 Separatrix 420 Sidereal period 347 Small oscillations 385 Spherical shell 176 Spring force 175 Strange attractor 426 Superposition 413 Symmetry 156 Synodic period 347
Tension 19 Thomson J. J. 48 Tidal forces 121 Torque 220 - of gravity 227 - with respect to an axis 223 Torsion pendulum 255 Turning point 417 Two-body problem 367
Vectors 433
Weightless 79 Work 51,167 - and energy 51 - done by a force 167 - in rotation of a rigid body 254
Yo-Yo 295
Stefan Zweig 350