Embed Size (px)
Citation preview

TICAM REPORT 96-48October 1996
Aposteriori Error Estimation for Finite ElementSolutions of Helmholtz Equation - Part II:
Estimation of the Pollution Error
I. Babuska, F. Ihlenburg, T. Strouboulis and S. K.Gangaraj

Aposteriori Error Estimation for Finite Element Solutionsof Helmholtz' Equation - Part II:Estimation of the Pollution Error
1. Babuska1 and F. Ihlenburg1
Texas Institute for COlllputational and Applied lvlathelnaticsThe Universitv of Texas at Austin
Austin: Texas 78712
T. Strouboulis2 and S. K. Gangaraj2Department of Aerospace Engineering
Texas A&M UniversitvCollege Station, Texas 77843
August 6, 1996
IThe work of these authors was supported by the U.S. Office of Naval Research under Contract NOOOl4--90-J-I030,by the National Science Foundation under Grant CCR-88-20279 and by Grant Ih-23 of the Deutsche Forschungsge-meinschaft (F.I.).
2The work of these authors was supported by the U.S. Army Research Office under Grant DAAL03-G-028, by theNational Science Foundation under Grant MSS-9025110 and by the Texas Advanced Research Program under GrantTARP-71071.
1

Abstract: In part I of this investigation, we proved that the standard a-posteriori estimates, based onlyon local computations, may severely underestimate the exact error for the classes of wave-numbers and thetypes of meshes employed in engineering analyses. We showed that this is due to the fact that the localestimators do not measure the pollution effect inherent to the FE-solutions of Helmholtz' equation with largewavenumber. Here, we construct a-posteriori estimates of the pollution error. We demonstrate that theseestimates are reliable and can be used to correct the standard a-posteriori error estimates in any patch ofelements of interest.
1 Introduction
In part I of this investigation, we studied the reliablity two popular aposteriori error estimators forthe Helmholtz equation 6u + e·u = O. Problems that are governed by this equation arise in manyapplications, for instance in acoustics and electromagnetics. The solutions for Helmholtz' equationwith large wavenumber k are highly oscillatory, hence the finite element mesh has to be very fine inorder to resolve the oscillations. Beyond that, the resolution rule that is usually applied in practicefor piecewise linear approximation fails as the wavenumber increases - see [1, 9, 11]. Apriorierror estimates that exactly quantify this effect have been shown in [11, 13). These preasymptoticestimates established a link between the observations in numerical experiments and well-knownestimates from previous mathematical investigations of FEM convergence for Helmholtz' equation.It was shown that the previous estimates hold only asymptotically whereas the error is polluted inthe range of practical computations. The notion of numerical pollution for Helmholtz' equation wasfirst introduced in [3]. For numerical investigations of the pollution effect in higher dimensions see[2] and [10]. In [3], it is shown that pollution cannot be, in general, 'circumvented' by the applicationof stabilized FEM. The more feasible approach so far is to accelerate convergence by higher-orderapproximation with h-p-FEM [12) of analytical trial functions as in the Partion of Unity method[16, 17). An overview of higher-order methods for Helmholtz equation is given in [14). However,though a lot of research effort is devoted to higher-order FEM, most of the codes applied in thepractical analysis of acoustic and electromagnetic problems use linear elements [9, 15]. We showedin part I that the Babuska-Miller residual estimator and the ZZ-estimator by Zienkiewcz and Zhuare not reliable for FEM-solutions of Helmholtz' equation with high wavenumber unless the meshis very fine. The effectivity index is close to one only if the meshsize h is in the asymptotic rangecharacterized by k2 h ~ 1. On meshes used in practice, the error indicators from both methodssignificantly underestimate the true error and may thus lead to wrong judgement of the solutionquality. We showed that the decrease in accuracy of the estimators for large wavenumber is dueto an increasing phase shift of the finite element solution at large wavenumber. The pollutionintroduced by the phase shift cannot be "seen" by the traditional local estimators.
In this paper, we propose a methodology of aposteriori estimation of the pollution effect. Forproblems of linear elasticity, this topic has has been extensively studied in [4]-[8]. We start herefrom the results and methodologies developed in these references. However, the basic ideas have tobe adapted to the highly oscillatory character of the solutions in the present case.
The paper is organized as follows. In section 2, we refer the basic ideas for the aposterioriestimation of the pollution error developed in [4)-[8]. We show that these estimators are asymptot-ically exact also for FE-solutions of Helmholtz' equation. However, both a theoretical estimate andnumerical evaluation (also section 2) indicate that the estimators are highly oscillatory themselvesand that their quality is only slightly better than the local estimators analyzed in part 1. This leads
2

to the idea of computing estimators of the locally smoothened pollution error. The outline of thisidea concludes section 2. We test this new approach both analytically and numerically. As theanalytical tool, we derive in section 3 formula.e for the asymptotic behavior of the pollution index.The asymptotic expressions do not depend on meshsize h; hence they are suited to investigate thedependence of the pollution estimator on wavenumber k. In section 4, we evaluate the pollutionestimator and compare its effectivity to the local estimators of part 1. An algorithmic presentationofthe proposed methodology and the main results of its evaluation conclude this paper (section 5).
2 Basic ideas and analysis
In this section, we outline and analyse the basic ideas for the estimation of the pollution error. Weuse the notation and the model problem introduced in part I, considering the variational problem:Find u E V = H(lo(O, 1) stich that
11du dv 11 11
B( u, v) = -d -d dx - k2 uvdx - ik'lJ,(l )v(l) = fvdxo x x 0 0
(2.1)
holds for all v E V. Denoting by Ij a fmite element with number j, we denote by B IJ the restrictionof the form B to Ij.
2.1 Aposteriori estimation of the pollution error by Green's function approach
Reviewing the methodology for estimation of the pollution error proposed in [4]-[8] we see thatthe key point is to use the Green's function G(x,s) E V = Hlo(I) as a test-function. The Green'sfunction lies in the test-space as a function of s for arbitrarily fixed x or, vice versa, as a. functionof x for fixed s. Furthermore, by defini tion, B( w( .), G( x, .)) = w( x) for 0 ::; x ::; 1; w E V. Takingw = eh = u - Uh we have, in particular,
(2.2)
for all Vh E Vh, where Vh C V is the subspace of piecewise linear functions. Choosing Vh = Il G(piecewise linear interpolant of G), and denoting 9 = G - Il G, we have
N
eh = B(eh,g) = LBj(eh,gj)j=1
N N
L rIJ(gj) = L Bj(ej,gj),j=1 j=1
where
( d2uh 2) IT[:= -f - - - k UhJ dx2 [
J
is the interior local residuum, gj is the restriction of 9 to the element Ijindicator function defined as the solution of: Find ej E HJ(Ij) such that
3
(2.3)
and ej is the residual
(2.4)

holds for all v E H;(Ij). Here, H;(Ij) denotes the subspace of HI-functions that vanish on theelement boundaries and (u, vh = JI uv is the L2 inner product on interval I.
For practical purpose, it still remains to replace the interpolation error gj by a function v EH;(Ij) that is computable a. poster'ioT'i. The obvious choice is the local residual indicator e[ of theFE error G - Gh, where Gh is the finite element approximation of the Green's function G. Moreprecisely, we define e[ as the solution of: Find il E H;(Ij) such that
for all v E H;(Ij), whererG(x ..) = hA') - k2Gh(X, .).
J
(2.5)
(2.6)
Since we have alrea.dy established aposteriori estimates for the element interiors, it is sufficient tocompute the pollution estimate in ju.st one point of each element. We choose the right boundaryby fixing x = Xi for computation of the pollution error in the element h Resuming, we obtain theentity
NE(x.) .= " B (-. -:G(x;,.))" L IJ eJ,ej
j=I#i
(2.7)
B (_G(x;,.) -) _ (.G(x;,.) -)I ej , v - 1I ,v ,J J IJ
with rf(x;,.)( . ) = -k2Gh(Xi' . ). Note that the Dirac function in the residual is skipped here sinceJ
the evaluation is done in nodal points and the functional r acts only on functions that vanish inthe nodal points. The element of interest is left out in the summation since the pollution error is
evaluated on the outside of the element. Similarly to E(x), we define an estimator for ~:(:id,x + x
where Xi =' ,-1 is the midpoint of element Ii, as follows:2
where DG(Xi'·):= l(G(Xi") - G(Xi_I" )). As before, we have the equality
de Nd h(Xi) ~ L BIj(ej, DG(Xi") - IhDG(Xi, .)).
x j=I#i
Similarly to (2.6), we define the residual
DG(x;,') _ k2DG (_ )rIj - - h Xi' .
d t h I I· _DG(x .. ) HI(·I ) . f .a.n compu e t e oca estImators ej 'Eo j satis ymg
B (_DG(xi,·) -) _ ( DG(xj.·) -)Ij ej ,v - rIj , v IJ
4
(2.8)

(2.9)
for all v E HJ(Ij). Finally, we define now an estimator for the derivative of the error at xi as
NE'(-.) = "B ('. -;::DG(x;,.))
Xt L...J IJ eJ,eJj=1J:l.i
Remark 1: The computation of the discrete Green's function Gh( xi,' ) is inexpensive when adirect solver is employed for the solution of the system of linear equations for the finite elementsolution. It involves only the forward elimination of an additional right-hand side and a back-substitution.
2.2 Analytical and numerical evaluation
To a.nalyze the quality of E'(Xi), consider the difference IE'(Xi) - e'(xi)l. We have
N
IE'() '()I I" B (' -;::DGh(X;,.) " (- ))1' Xi - e Xi = L...J j ej, ei - 9 j Xi,·j=1,J:l.i
N
I L Bj(ej, G,x (Xi,') - DGh(Xi,') - (G,x (Xi,') - IhG,x (Xi, ')))1j=I,J:l.i
by definition of eDG and g'j := G,x -IG,x' By excluding the element Ii from the summation wemake sure that both the trial and test functions are HI-functions. Denoting by e the functionthat is identical with ei on each element Ii and letting z(·):= DGh(Xi,') -IhG,x(Xi,')' we haveequivalently , , -IE (Xi) - e (xi)1 = IB(e,z)1
where the form B is defined on j := I - Ii . Making use of the fact that e vanishes in all nodalpoints of the mesh ~, we can integrate by parts as follows:
IB(e,z)1 = 1 k e'z' - k2 k ezl
< 1 k ez"l + k21 k ezl< Ilell (lIz"lI + k2l1zll)
where we applied the Schwartz inequality for the L2 inner product. It can be shown (d. [11], proofof Theorem 3.1) that z solves the variational problem: find z such that
- 2B(z,v) = k (G,x -IhG,x,V)n
for all v E Vh. Then the norms of z and its derivatives can be estimated by the L2-norm of thedata k2!/ = k2 (G,x -IhG,x) using Lemma 1 from [11). We assume that this Lemma holds also onthe subspace (d. Lemma 3 of [11]). Then we have (all L2-norms are computed over the reduceddomain nand C is a generic constant which may be different in different estimates)
IIzll ~ Ckllg'lIIlz"ll ~ Ck311g'II
5

and, by the standard interpolation result
where IIG,xss II S; Ck2• Further, we know from our local analysis that lIell S; Ch2I1u"lI. Assemblingthe results we finally obtain
IE'(x) - e'(x)1 rv k5h4I1u"ll.On the other hand, it is well-known that Chllu"l1 ~ leII ~ chllu"ll. Hence, writing IE'/e'lIE' - e' + e'l and putting le'l rv leII we obtain the bounds
By similar argument, we may show that
Assuming that the shifted and the exact solution have similar curvatures in average we have shown
Proposition 2.1 LetEi:= E(xd and EI := E'(xd be the pollution estimators for the element Iias defined in eqs (2.7), (2.9), respectively, and let e(x) be the exact error of the FEM. Then thelocal pollution effectivity indices can be estimated as
1 - c(k4h2) < IEil < 1+ C(k4h2)- Ilell -
1 - c(k5h3) S; II~~IS; 1+ C(k5h3
)
where c, C are generic constants not depending on k, h.
(2.10)
(2.11)
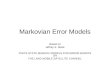
The estimates show that one can expect superconvergence in h, as in the non-oscillatory case.Eq (2.11) indicates a slight improvement in terms of h, k compared to the local estimate in Theorem3.1, part I, but it is still unsatisfactory since the constants c, C are not known and the bounds maybe extensively large if k is large and only hk is restricted. On the other hand, the broad band for theeffectivity index given by inequality (2.11) indeed reflects the oscillatory behavior of the pointwisepollution estimator E'(x). In Fig. 1, we show the true pollution error and the pollution estimatorE'(x) for k = 100 as a function of x. Though the estimator is close to the solution everywhere,still the effectivity index IE'(x )/e'(x)1 oscillates between peak values of ~ 2.2 and ~ 0.8. Observethat the upper peak values are achieved at coordinates where both the error and the estimator areclose to zero. Note that the computation is carried out on a refined (w.r. to the recommendedrelation for hk) mesh. Results from a computation with the "rule of thumb" hk = 0.6 - but forsmaller wavenumber k = 30 - are shown in Fig. 2. Observe that the maximal value of the pollutioneffectivity index is larger than 7.
6

k=100, h=1/3000.0050
0.0040....0........Q)- 0.0030(.)IIIx
W..:0
C5 0.0020E
-.;:;rJl I - Pollution estimator E'UJ
0.001 0 ~~ I~I~ij ~ , ~ f ~ , ~IU I U •Exact error le'bl
~I, I I I I I I . I
I I0.00000.0 0.2 0.4 0.6 0.8 1.0
x-coordinate
k=100, h=1/3002.25
2.00-.s::-Q):;;;;: 1.75LuxQ)"0 1.50.£:;
~:~u 1.25Q)
==UJ
1.00
0.750.0 0.2 0.4 0.6 0.8 1.0
x-coordinate
Figure 1: Pollution estimator to exact error and pollution effectivity index as functions of x fork = 100, hk = 0.3.
7

k=30, h=1/500.080
.... I Estimator E'0 - Derivative of the exact errorcoE 0.060~Q)
..:e....Q)
Q) 0.040..!:--0Q)>.~
0.020>'L:Q)0
0.0000.0 0.2 0.4 0.6 0.8 1.0
x-coordinate
k=30, h=1/508.0
iLlo 7.0coE~ 6.0Q)
Q)
£15 5.0><Q)"0c::';' 4.0-'S;.~u£ 3.0w
2.00.0 0.2 0.4 0.6 0.8 1.0
x-coordinate
Figure 2: Pollution estimator to exact error and pollution effectivity index as functions of x fork = 30, hk = 0.6.
8

2.3 Aposteriori estimation of locally smoothened pollution errors
From our analysis and numerical observations, we draw the following conclusions with respect tothe reliable estimation of the pollution error.
1. The error estimator E( x) (L2-norm) is not suited for reliable estimation of the pollution error.
2. The pollution error is oscillating with the same frequency as the solution itself. The effectivityindex becomes infinite or very large whenever the exact pollution error is zero or close to zero.
Hence, due to the oscillatory behaviour of the error and the estimators we cannot, in general,obtain reliable estimates of the pollution error at a point or in an element. As a remedy, we proposeto evaluate an smoothened value of the pollution error instead. The method of smoothening mustof course be local. Further, it should lead to a new function that is closely related to the function ofinterest but is less oscillatory and bounded away from zero. With these goals in mind, we consider(a) taking sliding averages of the estimator E'(x) and (b) approximating the upper envelope ofthe oscillatory curve by taking local maxima over a patch of elements. Both methods lead to newfunctions that have lower frequency and amplitude of oscillation than the original function. Bytaking the upper eIlvelope we make sure that the smoothened function is sufficiently bounded frowbelow.
More precisely, we define - for a given interior element number i-the local index-set
Jloc = {i - nloc, i - nloc + 1, ... , i + nloc}
with nloc = [4"h] where A is the wavelength and the square brackets mean the biggest integer notexceeding the argument. With this, we define smoothened errors in the element i as
env I ' (- ) Ieli = max eh XjJEJ10c
Both methods of smoothening are illustrated in Fig. 3 and Fig. 4. We note that for the slidingaverages the best smoothening effect is achieved if the averaging interval is chosen to be one-halfthe wavelength. In Fig. 4 we consider averaging by means of the upper envelope. As anotherillustration, we show in Fig. 5 the absolute value of the exact error for k = 100 and its mean valuecomputed by sliding averages. We see that the oscillations are significantly reduced in amplitudeand that the mean value curve is bounded away from zero. We will hence measure the averagederror over a patched by an averaged estimator which is designed such that it is overestimating. Inthe next section we will give the asymptotic study of the estimator and its averaged value.
3 Asymptotic behavior of the pollution index
We seek asymptotic expressions for the pollution estimator and the true error which are suitableas an analytical tool to investigate the behavior of the pollution effectivity index as a function of
9

k=100, hk=0.1
- No averaging- lav9= 0.05*wavelength---- lavQ= 0.25*wavelength
0.050
0.045'-01ii 0.040.1;iii 0.035wQ)
0.030L:-'0 0.025Q):Jto 0.020>
"C~ 0.015l!!Q) 0.010>«
0.005
0.0000.00 0.02 0.04 0.06
x-coordinate0.08 0.10
'-o1ii,I;Ji 7.0Q)L:15 6.0Q):JIii 5.0>Q)0>l!! 4.0Q)
10Q) 3.0L:-
(a) Absolut.e value of pollution est.imat.or using t.he sliding averages
k=100, hk=0.1
No averaginglav9= 0.05*wavelengthlavQ= 0.25*wavelength
'0 20>< •Q)
"C.£;; 1.0>--'(3
't3 0.02 0.00[j
0.02 0.04 0.06x - coordinate
(b) Effectivity index using t.he sliding averages
0.08 0.10
Figure 3: Effect of averaging on estimator and effectivity index as functions of x for k - 100,hk = 0.1.
10

Effect of the averaging intervallavg for the envelope of the exact error
0.100.08
lavg No averagingL~ = 0.25*wavelength
0.04 0.06x-coordinate
0.030
0.025
0.020
0.015
0.010
0.005
0.0000.00 0.02
0.050
0.045
0.040 .~
-0)- 0.035Q)::J
"'iii>
"Q)0>~Q)
><{
(a) Absolute value of pollutiou estimator using the upper envelope
No averagingL_ = 0.25*wavelenath
~o1iiE~ 7.0Q).c:: 6.0oQ)::J
"'iii 5.0>Q)
~ 4.0~Q)
iUQ) 3.0~-'0 2.0xQ)
".!; 1.0>.-'0·U 0.0~ 0.00Ui
0.02
k=100, hk=0.1
0.04 0.06x - coordinate
0.08 0.10
(b) Effectivity index using the upper envelope
Figure 4: Effect of averaging on estimator and effectivity index as functions of x for k 100,hk = 0.1.
11

Absolute error with and w/o averagingk~100.N=600
1.2a-05
1.00.80.60.4
- averaged over quarter of waveJength- - - - not averaged- averaged over hatf of wavelength
. ~~- , ~~
fi " ~ tI' ~ ~ ~ • • I I • ~~ft ~ ~ w ~ ," " " " II II .. ' ... I, '. II ,I ... ," It " ~ II 'I II 'I ~ " .~ " _ • •
"
I' ~ " ij ~ II ~ ~ ~ •• r·1~~II·~ll •,: II d : I0.2
:', i'II It" ,I" "HI i
•- .:: ~~ , ,I. '. :' '- , ,
I, ': :: ~ ~ ~ ••
" :! ~ ~ : ~ !
.. II " ~ : : >. I l •~ " • '..• 'II II ,! .: " " .. ~ t! n ~ n "
2.0a-060.0
1.0a-05
4.0e-06
8.Oe-06
6.0a-06
x
Figure 5: Smoothed exact error obtained by sliding averages over 1/2 wavelength
k. We begin by defining from eq (2.9) the normed expression
( )
1/2
1 N __£1:= h L IBIj(ej, efG(x;,. »)12
)=1j:f.i
(3.1 )
as the pollution estimator of the finite element solution uh(x,k) in HI-norm. Comparing to theexact pollution error, we define the pollution effectivity index
(3.2)
with
(3.3)N
el:= I L BI/ej,DG-IhDG)I·j=1j:f.i
Let us analyse the effectivity index for the model problem, considering first the asymptoticsh --+ 0 and then the asymptotics k --+ 00. Using difference calculus, one finds that, for data f = 1,the finite element solution in the nodal points Xh is [l1J
with a "discrete wavenumber" k(k, h) t= k. Similarly, the discrete Green's function is
(3.4)
where the coefficients A1(k, h), A2(k, h) are computed from the boundary conditions - see [11).
12

The shifted solution u is simply obtained by extending the nodal function Uh to all x E (0,1),
1 ( - - )u(x,k,h)= Jt2 -1+Alsinkx+coskx
For h -t 0, the function u converges to the exact solution
1u(x) = k2 (-1 + coskx + sin ksin kx + i(1 - cosk) sin kx).
Similarly, we can write the estimator iP as
eG = G(x, s) - Gh(X, s)
where G is obtained from Gh in eq (3.4) by replacing the discrete Xh with continuous x. (Forsimplicity of notation, we use here G h both for the nodal function defined above and the piece-wise linear function connecting the nodal values of G h') Now, the interpolation error of a twicedifferentiable function on the interval ~i = [Xi-I, xd is
ef(s) = (s - si-d(s - Si)J"(~(x))2
for some ~(x) E ~i' Assuming that h is small such that .f" does not change much over ~i we put
/"(0 ~ /,,(8)
where 8 = (Si + Si-l )/2 is the mid-point of the interval ~i. With this assumption, we compute thelocal forms in the estimator £1 as
BI}(e(s),eDG(x,)(s)) =1 -4u"(s)Gxss(s) BIj«S - Sj)(s - Sj-J), (s - Sj)(s - Sj-d)·
On uniform mesh, the local forms are constant, HIj == h3/l2 (1 - k2h2/lO), and we have
Considering this sum as a Riemann sum we see that the corresponding integral is
Similarly, we write the absolute value of the exact pollution error in x as
N
e(x) = I L BIj(e(s),Gx(x,s) - IGx(x, ·)(s))I·j=l,j#i
13

which leads to
Here, the second derivative of the shifted solution ii" has been replaced using its definition in part1. Remark 2: This expression can be used as an explicit estimator of the error in the derivative ofthe error, i.e. one can compute an estimate of the error directly without solving any local problems.
In order to further simplify the asymptotic expression consider the a.symptotics k -t k. Fromour analysis of the phase lag [11, 12] we know that k = k + O(k3h2). We assume that hand k aresuch that the phase lag is small. Then it -t U, G -t G and the numerator of the effectivity indexbecomes
(3.5)
(3.6)
with11l"( sW = sin2 ks(1 - 2 cos k) + sin 2ks sin k + 1.
We now compute the integrals in eq (3.5) under the assumption that k is large, neglecting termsof the form f(k,x)/k with bounded Ifl; e.g., we put fsin2ks = 1/2x-l/2ksinkxcoskx ~ 1/2x.Carrying out a similar computation for the denominator of the effectivity index Up, we show
Proposition 3.1 Consider the model problem {2.1-3} and let E1, el be the pollution estimator andexact pollution erTor as defined in eqs {3.1}, {3.3}, respectively. Then, for' 0 < x < 1, the equalities
El = A (x (f -1cosk) + (1- x)cos2 kx (~_ COsk))) 1/2
el = A (lcos2 kx ((cosk - x)2 - x2(cosk - 1)2)
x(x - 1) x2)+ coskxsinkxsin2k+-(I-cosk)
4 2
hold asymptotically for small h and large k, where
A = k2h2 (1- k:~2)
(3.7)
We see that, asymptotically, the error norm el (x) oscillates with frequency k. Furthermore,el (x) vanishes ar all zeros of cos kx if cos k = 1 . On the other hand, the error norm is boundedaway from zero for all x > 0 if cos k -1 > a > O. This explains observations from the finite elementcomputations that the (unaveraged) effectivity index is highly sensitive not only to the magnitudeof k and the relation of k and h but also to slight changes in the value of k on fixed mesh. Thissensitivity is clearly removed by the proposed ideas of smoothening.
14

4 Numerical evaluation
The goal is to show the reliability of the pollution error estimator compared to the local estimatorsanalyzed in part 1. In praticular, we want to see the effect of smoothening on realistic (preasymp-totic) meshes. By reliability in this context we mean if the estimator leads to good (i.e., sufficientlyclose to one) effectivity indices on meshes with kh = coust. It is also favorable that the estimatoroverestimates the true error.
Let us first evaluate the asymptotic behavior of the estimator. In Fig. 6, we show the asymptoticexpressions of E1(x),e1(x) for k = 100, together with the mean values and evelopes. The envelopeof the numerator E1 is obtained if we set I cos2 kxl = 1 or = 0, respectively.
{
(-5/8 + co~k)) x + 3/2 - cos(k)Env(E1) =
~ (7/4 _ 3CO;(k))
upper
lower
Approximate envelopes of the denominator are obtained by assuming that the phases cos2 kx andsin 2kx oscillate with equal amplitude. The mean values of the numerator and denominator arethen obtained as the arithmetic means of the envelopes. The effectivity indices, as functions ofx, with and without averaging, are shown in Fig. 7. We see the positive effect of smootheningon the effectivity index. The asymptotic mean value effectivity index, as a function of k, is shownin Fig. 8. The index oscillates but does not grow with k. Unlike the local estimators which areasymptotically exact, the pollution estimator is asymptotically overestimating, as intended by itsdesign.
Finally, we show FE-computations in the preasymptotic range on meshes designed by the refined"rule of thumb" hk = 0.3. We wish to compare the pollution estimator to the local estimatorsanalyzed in part 1. On the example of two large wavenumbers, k = 100 and k = 500, we show inFig. 9 the local residual indicators and the estimator Epal versus the smoothened true error Jeh(x)l·Note that the errors are plotted in log-scale. The pollution estimator overestimates the true errorin average by a factor 2-3 whereas the local indicators underestimate the true error by a factor100-1 ... 10-1. The dependence of the effectivity indices x is illustrated in Fig. 10 for different k.Firstly, we observe that the averaged effectivity index behaves smoothly w.r. to variation of thecoordinate x. The variation of the index w.r. to k are moderate and in the range predicted by theasymptotic analysis (Fig. 8).
15

(a) EI(x) with envelopes and mean value
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0_04
0.02
(b) el (x) with envelopes and mean value
Figure 6: Pollution estimator and pollution error, asymptotic expressions from Proposition,smoothed by wave-enveloping and mean-value approach as functions of x for k = 100.
16

5 Conclusion
Resuming our analysis, we propose the following methodology of a posteriori error estimation. Toestimate the pollution error for an element ~i in the enterior of n, do:
(1) Define nloc := [A], where the square brackets mean the largest integer not exceeding theargument. Thus n>. := 2nloc + 1 is approximately the number of elements per half-wave.Compute, for the elements ~m with i - n/oc ~ m ~ i+ n/oc, the pointwise estimator:
_ Xm + Xm-1where Xm = 2 '
efG(xm.·) E sg(Ij): B1j(efG(xm,·),v) = (( - k2DG(xm,· )),v(· ))IJ
and
_ _ v(xm) - v( xm-dDG(xm, .) E Vh : B(v, DG(xm, . )) = h V v E Vh.
Here, Vh is the usual (global) FE-space of piecewise linear approximation whereas sg(Ij) arelocal approximation spaces of order q > 1.
(2) Compute the a.rithmetic mean
and take this average to be the averaged pollution estimator for the element ~i.
Accordingly, we define the averaged pollution effectivity index as
Epol(~d(~.).= Ideh - )1epol ,. 1 ",j+nloc -( X
m- L..Jm=J-nloc dxn",
(5.1)
We thus propose a methodology that does not access the pollution error in one element only butrather over a patch of elements covering approximately one wavelength. Our evaluation shows thatthis approach guarantees for high wavenumber:
• Overestimation of the true error instead of severe underestimation by the local estimators;
• Effectivity indedes in the range of 1 ... 3 compared to 100-1 ... 10-1.
• Smoothening of the effectivity index w.r. to the coordinate x; i.e., the estimator is equallyreliable throughout the domain.
17

References
[1] A. Bayliss, C.l. Goldstein, E. Turkel, 'On accuracy conditions for the numerical computationof waves', J. Compo Phys., 59, 396-404 (1985).
[2J 1. Babuska, F. Ihlenburg, E. T. Paik, S. A. Sa.uter, 'A generalized finite elementmethod for solving the Helmholtz equation in two dimensions with minimal pollution',Compo Meth. Appl. Meeh. Engng., to appear
[3] 1. Babuska, S. Sauter, 'Is the pollution effect of the FEM avoidable for the Helmholtz equationconsidering high wave numbers', Technical Note BN-1172 (1994), Institute for Physical Scienceand Technology, University of Maryland at College Park.
[4] 1. Babuska., T. Strouboulis, A. Mathur, C. S. Upadhyay,' Pollution error in the h-versionof the FEM and the local quality of a-posteriori error estimators', Technical Note BN-1163(1994), Institute for Physical Science and Technology, University of Maryland at College Park.
[5] 1. Babuska, T. StroubouHs, C. S. Upadhyay, S. K. Ga.ngaraj, 'A-posteriori estimation andadaptive control of the pollution-error in the h-version of the FEM', Technical Note BN-1175(1994), Institute for Physical Science and Technology, University of Maryland at College Park.
[6J 1. Babuska, T. Strouboulis, S. K. Gangaraj, C. S. Upadhyay, , Pollution error in the h-versionof the FEM and the local quality of recovered derivatives', Technical Note BN-1l80 (1994),Institute for Physical Science and Technology, University of Maryland at College Park.
[7J 1. Babuska, T. Strouboulis and C. S. Upadhyay, 'A model study of the quality of a posteri-ori error estimators for linear elliptic problems. Error estimation in the interior of patchwiseuniform grids of triangles', Comput. Methods Appl. Meeh. Eng., 114,307-378 (1994).
[8J 1. Babuska, T. StroubouHs, C. S. Upadhyay, S. K. Gangaraj and K. Copps, 'Validation of aposteriori error estimators by numerical approach', Int. J. Numer. Methods Eng., 37, 1073-1123 (1994).
[9J Ph. Bouillard, J.-F, Allard and G. Warzee, 'Accuracy control for acoustic finite element anal-ysis', ACUSTICA I, 1996, p. S156
[10J K. Gerdes and F. Ihlenburg, The pollution effect in FE solutions of the 3D-Helmholtz equationwith large wave number, TICAM report 6/96
[l1J F. Ihlenburg and 1. Babuska, 'Finite element solution to the Helmholtz equation with highwave number - part I: The h-version of the FEM', Computers Math. Applie., Vol. 30 (1995),No. 9,9-37
[12J F. Ihlenburg and 1. Babuska, 'Finite element solution to the Helmholtz equation with highwave number - part II: The hp-version of the FEM', Technical Note BN-ll73 (1994), to appearin SIAM J. Numer. Anal.
f13] F. lhlenburg and 1. Babuska, 'Dispersion analysis and error estimation of Galerkin finite ele-ment methods for the Helmholtz equation', Int. j. Numer. Methods Eng., 38 (1995) 3745-3774
18

[14J F. lhlenburg and 1. Babuska, 'Solution of Helmholtz problems by knowledge-based FEM', toappear in "Computer Assisted Mechanics and Engineering Sciences"
[15J D. S. Katz, 'Large Scale Electromagnetic Analysis Using Unstructured Grids', Seminar lecture,TICAM, UT at Texas, May 1996
[16] J.M. Melenk and 1. Babuska, 'The partition of unity method: basic theory and applications',TICAM report 96-03, UT at Austin, 1996
[17J J .M. Melenk, 'On generalised finite element methods', PhD dissertation, Universtiy of Mary-land, 1995
19

.ff
(a) Effectivity index
0.5 ·0
(b) Averaged Effectivity index
Figure 7: Effectivity index, asymptotic expression, original and averaged by mean-value approachas functions of x for k = 100.
20

'100 2uO 3uOlev
400 Suo
Figure 8: Mean-value effectivity index in x = 0.4 as a function of k
21

Element residual error indicatorEstimator Epa,Averaged value of le'hl
0.1000
0.0100
0.0010
0.0001
\i\:: :.,
k=100, h=1/300I
h ..::
I
"
0.00000.700 0.720 0.740 0.760 0.780 0.800
x-coordinate
k=500, h=1/2oo00.1000 ~ ,
r-::~___....._ Element residual error indicator- Estimator Epo,- Averaged value of Ie'J
0.0100
e 0.0010....w
0.0001 !\(\NW~WwN{~WWWWWWWWWW:f\I' '\'0.0000
0.700 0.705 0.710x-coordinate
0.715 0.720
Figure 9: Reliability of averaged estimator compared to local aposteriori estimators, Estimator Epol
vs. averaged true error vs. local residual indicator as functions of x for k = 100, k = 500.
22

~0 hk = 0.3(tjE 3.0.~(/)
wQ) r k=500£"6 25Q) •
:J(ij>Q)0)coCii 2.0> I k=200coQ)
-£'0)( 1.5Q)"0 I k=100.!;;;
~.:;;U 1.0~ 0.40 0.42 0.44 0.46 0.48 0.50 0.52 0.54 0.56 0.58jjj x-coordinate
Figure 10: Averaged pollution effectivity index as function of x for increasing k
23