Embed Size (px)
Citation preview
UNIVERSIDAD TECNOLOGICA DE CAMPECHE
SEGUNDO CUATRIMESTRE MECATRONICA, GRUPO: C
NOMBRE DEL PROYECTO:
“BANDA TRANSPORTADORA”
QUE PRESENTA:
ARCOS NOVELO CALOS EMANUEL
CERINO GARCÍA VANESA
FLORES ARGÁEZ CYNTHIA DE JESÚS
VASCONCELO MAY JOSUE
SN. ANTONIO CARDENAS, CARMEN, CAMP. ABRIL 20 DE 2010
Introducción.
En este reporte se comentara y explicara la realización de un proyecto final
realizado por alumnos del segundo cuatrimestre de la carrera ingeniería
mecatrónica, que deberá cubrir ciertos requisitos tales como: el uso de dos
sensores como mínimo para demostrar los conocimientos obtenidos en la
materia de sensores, los cuales deberán ser programados por un arduino para
exponer la programación que se aprendió en la materia de lógica de
programación, y debido a estas aplicaciones de misma manera se abarcara la
materia de electrónica analógica, por último para muestra de la implementación
de la materia de neumática, al proyecto se le incorporara el uso de
electroválvulas y cilindro neumático.
El proyecto llamado “la banda transportadora” surgió de la idea de mejorar la
propuesta realizada un cuatrimestre anterior. Esta idea se constituye por una
banda que transportara objetos, la cual será movida por un motor regulado con
9 volts aproximadamente. Los objetos al ser transportados por la banda
pasaran por un sensor que detecta el color de los objetos. , si uno de ellos es
del color determinado como basura; se activara un actuador que lo expulsará.
Los demás objetos seguirán pasando por la banda y serán contados al final de
esta.

Objetivo.
El objetivo de la realización de este trabajo es el ser ingeniosos para elaborar
un proyecto en el cual podamos demostrar lo aprendido durante el
cuatrimestre. El saber qué tipo de sensor debemos usar para determinada
aplicación, y el uso de este mismo, poder programar los sensores, manejar
con habilidad la electrónica que se necesitara hacer para la construcción del
proyecto, y complementar este proceso con el uso de la neumática.
Con la realización de este trabajo, y la compresión y uso de las asignaturas
cursadas, el principal objetivo es el saber cómo realizar la automatización, ya
que es la estructura de esta carrera.
Justificación.
La justificación del por que hacer este trabajo, es en una parte para cumplir
como una tarea asignada para las materias de sensores, electrónica analógica,
lógica de programación y sistemas hidráulicos y neumáticos, con la cual se
calificara el tercer parcial del cuatrimestre. Pero el motivo de la decisión de por
el cual construir “la banda transportadora” fue el hecho de querer poder realizar
un proceso automatizado para diversas aplicaciones en cualquier industria en
el cual se muestre la finalidad de nuestra carrera.
Desarrollo.
Objeto Camara Arduino Electrovalvula Cilindro
Detector de objetos Contador
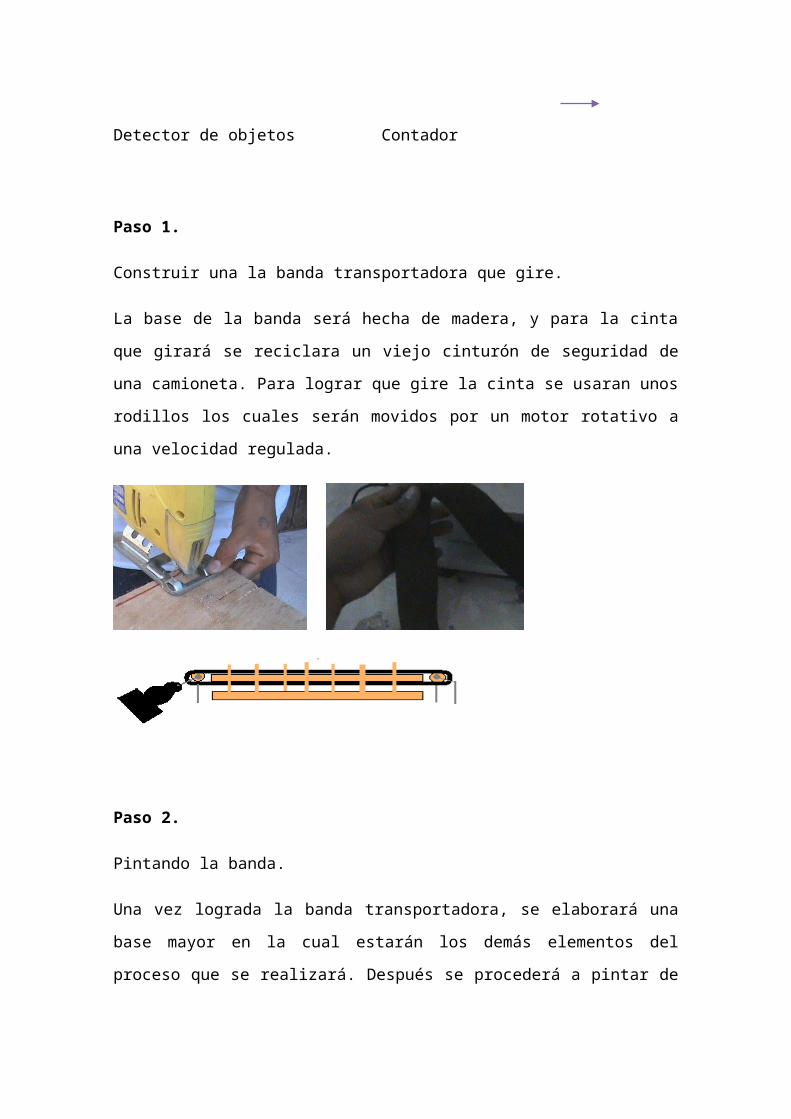
Paso 1.
Construir una la banda transportadora que gire.
La base de la banda será hecha de madera, y para la cinta que girará se
reciclara un viejo cinturón de seguridad de una camioneta. Para lograr que gire
la cinta se usaran unos rodillos los cuales serán movidos por un motor rotativo
a una velocidad regulada.
Paso 2.
Pintando la banda.
Una vez lograda la banda transportadora, se elaborará una base mayor en la
cual estarán los demás elementos del proceso que se realizará. Después se
procederá a pintar de pintura metalica cromada, para simular que es metal la
estructura.
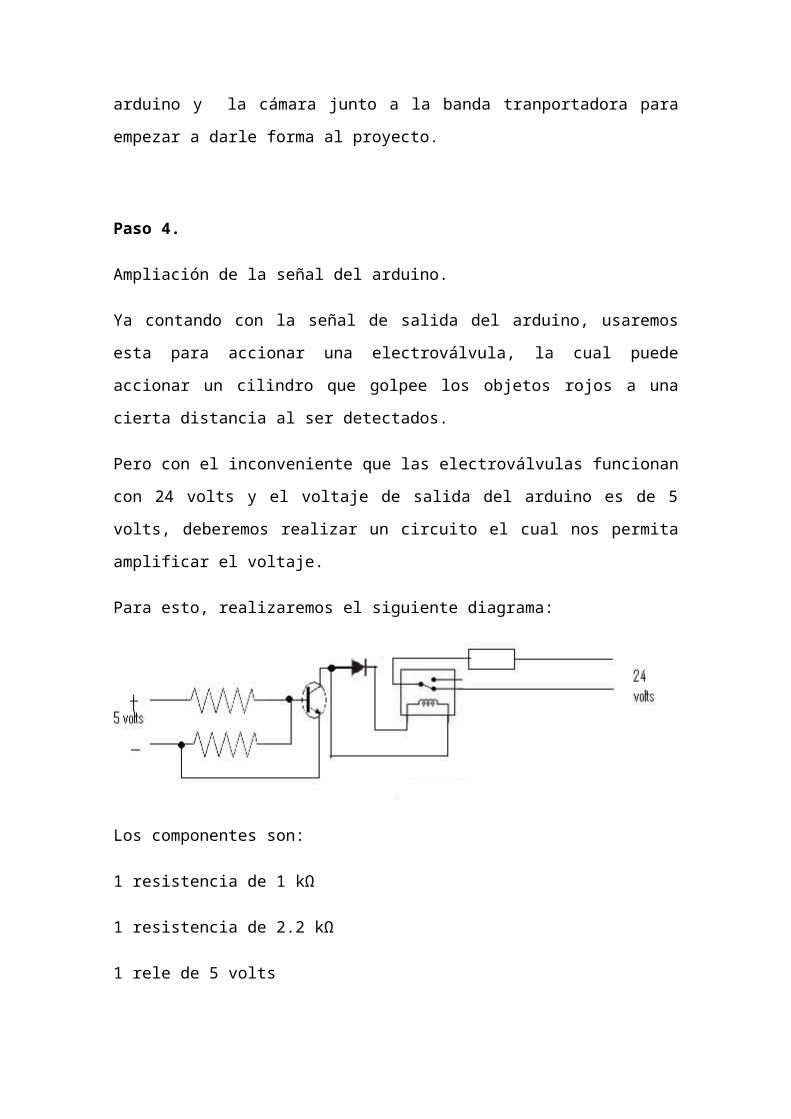
Paso 3.
Programar con el arduino la cámara.
Al inicio de la banda se localizará una webcam que funcionara como un sensor
para detectar los colores de los objetos que pasarán por ese mismo punto.
Para lograr esto tenemos que programar la cámara con el arduino, un software
y hadware que cuando la cámara detecte el color determinado como basura
(en este caso el rojo) enviara una señal de 5 volts que se usara para otra
función.
Una vez logrado que la cámara detecte el color rojo y que el arduino mande
una señal al suceder esto, se ajusta el arduino y la cámara junto a la banda
tranportadora para empezar a darle forma al proyecto.
Paso 4.
Ampliación de la señal del arduino.
Ya contando con la señal de salida del arduino, usaremos esta para accionar
una electroválvula, la cual puede accionar un cilindro que golpee los objetos
rojos a una cierta distancia al ser detectados.
Pero con el inconveniente que las electroválvulas funcionan con 24 volts y el
voltaje de salida del arduino es de 5 volts, deberemos realizar un circuito el cual
nos permita amplificar el voltaje.
Para esto, realizaremos el siguiente diagrama:
Los componentes son:
1 resistencia de 1 kΩ
1 resistencia de 2.2 kΩ
1 rele de 5 volts
1 diodo rectificador
1 transistor 3904
Una vez que se haya probado que funcione el circuito, se proseguirá a pasarlo
a una placa fenolica realizando los mismos pasos antes mencionados para este
procedimiento.
Paso 5.
Activación de la electroválvula.
Al tener el circuito del rele para amplificar la salida del arduino, podemos
conectar la electroválvula donde va la carga en el circuito del reley. Para hacer
esto, debemos tener ya conectado el compresor a la unidad de mantenimiento,
y esta a una línea que alimente a la electroválvula, y esta debe ir conectada a
un cilindro de doble efecto. Así podremos verificar que funcione y se actue el
cilindro en un determinado tiempo al pasar un objeto de color rojo.
Una vez que haya funcionado esto, se debe ajustar el cilindro en el lugar donde
exactamente queramos que expulse al objeto. Para esto tenemos que realizar
una base para que el cilindro también vaya ajustado a la base del proyecto.
Codigo del Arduino
int valvula=8;//delcamos valvula en el puerto 8//void setup() //funcion donde delclaramos que va hacer esa variable pinMode(valvula,OUTPUT);//declaramos que valvula es de salida Serial.begin(9600);//empiesa a leer en taza de 9600 baud la señalvoid loop()//funcion donde se hacen las operaciones if(Serial.available()>0)//si la señal es mayor que cero entras digitalWrite(valvula,LOW);//apaga la valvula delay(350);//retrasso de 750 mili segundos digitalWrite(valvula, HIGH);//prende la valvula delay(250);//retraso de 250 mili segundo digitalWrite(valvula,LOW);//apaga la valvula Serial.flush();//borra lo guardado
Paso 6.
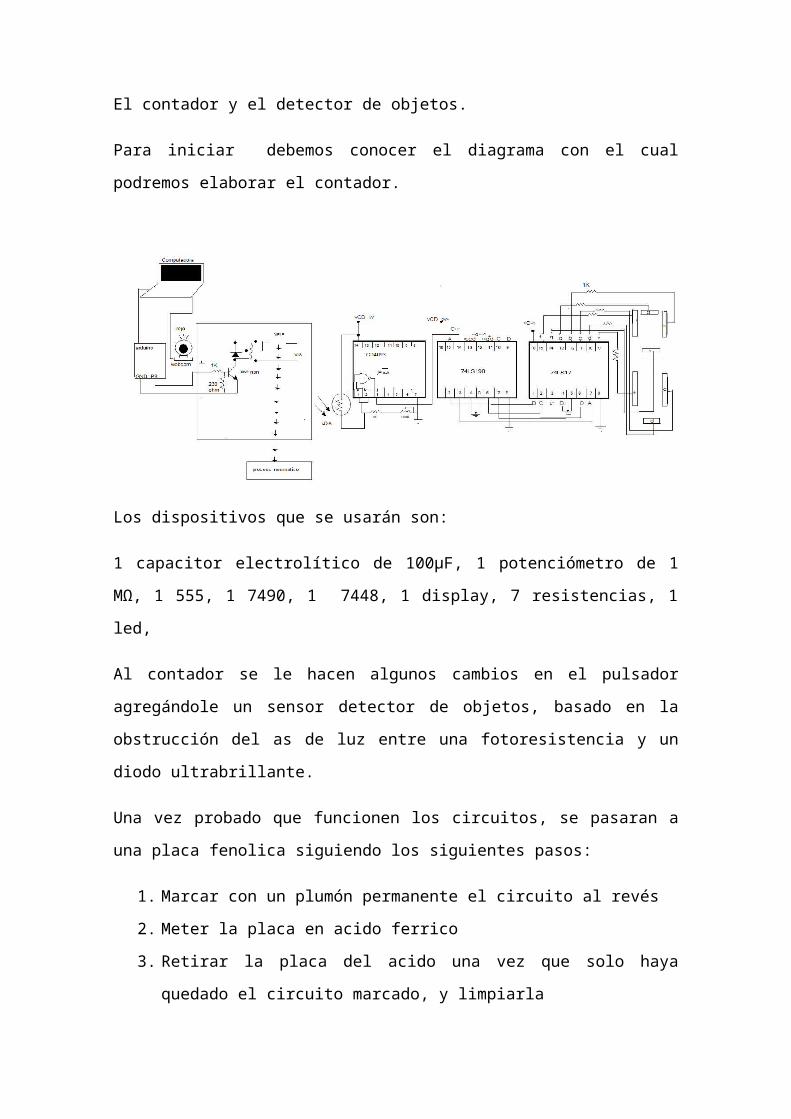
El contador y el detector de objetos.
Para iniciar debemos conocer el diagrama con el cual podremos elaborar el
contador.
Los dispositivos que se usarán son:
1 capacitor electrolítico de 100µF, 1 potenciómetro de 1 MΩ, 1 555, 1 7490, 1
7448, 1 display, 7 resistencias, 1 led,
Al contador se le hacen algunos cambios en el pulsador agregándole un sensor
detector de objetos, basado en la obstrucción del as de luz entre una
fotoresistencia y un diodo ultrabrillante.
Una vez probado que funcionen los circuitos, se pasaran a una placa fenolica
siguiendo los siguientes pasos:
1. Marcar con un plumón permanente el circuito al revés
2. Meter la placa en acido ferrico
3. Retirar la placa del acido una vez que solo haya quedado el circuito
marcado, y limpiarla
4. Soldar las piezas.
Al estar concluido el contador con el detector de objetos, se instalaran en la
base junto a la banda.
Paso 7.
Ajustes finales.
En este paso ya logramos que todo el proceso funcione, por lo que lo que
prosigue es ajustar todos los componentes a la base, pintar todo y hacer
pruebas finales.
Conclusión.
Podemos decir en conclusión, que gracias al arduino podemos programar una
cámara web para ser usada como sensor, y a la vez, este arduino puede enviar
una señal que active una sistema neumático. Con la aplicación de la

electrónica se puede realizar un contador que se active con una señal
mandada por un sensor simple como una fotoresistencia y un diodo
ultrabrillante, cabe decir que en este caso el sensor principal fue la cámara web
en si ya que por medio del Roborealm (programa) se hizo un sistema de
reconocimiento de imágenes mandando a activarse cuando pasara únicamente
el color rojo, cualquier duda sobre esta parte con mucho gusto la contestare.
Este proyecto fue un buen aprendizaje de cómo realizar algo automatizado, y
nos sirvió para afirmar nuestros conocimientos obtenidos durante este
cuatrimestre.
Ahora se sabemos reconocer que tipo de sensor usar para determinada
variable en un proceso, el uso la programación como algo indispensable para
poder utilizar sensores, el uso de la neumática sirve para todo proceso
automatizado, y gracias a lo aprendido de electrónica pudimos realizar los
circuitos que se presentarón.


![$1RYHO2SWLRQ &KDSWHU $ORN6KDUPD +HPDQJL6DQH … · 1 1 1 1 1 1 1 ¢1 1 1 1 1 ¢ 1 1 1 1 1 1 1w1¼1wv]1 1 1 1 1 1 1 1 1 1 1 1 1 ï1 ð1 1 1 1 1 3](https://img.pdfslide.us/doc/110x75/5f3ff1245bf7aa711f5af641/1ryho2swlrq-kdswhu-orn6kdupd-hpdqjl6dqh-1-1-1-1-1-1-1-1-1-1-1-1-1-1.jpg)
![1 1 1 1 1 1 1 ¢ 1 1 1 - pdfs.semanticscholar.org€¦ · 1 1 1 [ v . ] v 1 1 ¢ 1 1 1 1 ý y þ ï 1 1 1 ð 1 1 1 1 1 x](https://img.pdfslide.us/doc/110x75/5f7bc722cb31ab243d422a20/1-1-1-1-1-1-1-1-1-1-pdfs-1-1-1-v-v-1-1-1-1-1-1-y-1-1-1-.jpg)



















![1 $SU VW (G +LWDFKL +HDOWKFDUH %XVLQHVV 8QLW 1 X ñ 1 … · 2020. 5. 26. · 1 1 1 1 1 x 1 1 , x _ y ] 1 1 1 1 1 1 ¢ 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1](https://img.pdfslide.us/doc/110x75/5fbfc0fcc822f24c4706936b/1-su-vw-g-lwdfkl-hdowkfduh-xvlqhvv-8qlw-1-x-1-2020-5-26-1-1-1-1-1-x.jpg)





