Embed Size (px)
Citation preview

ANTROPOMETRIC DATA
Segment Dimensions – Body segment lengths can be expressed as a fraction of body height, H.

ANTROPOMETRIC DATA

MASS OF SEGMENT
Calculate COM of thigh and foot using antropometric data.
Coordinates:
Ankle (84.9, 11.0), metatarsal (101.1,1.3), greater trocanter (72.1, 92.8), lateral femoral condyle (86.4, 54.9)

COM of thigh and foot
Based on table 3.1, foot COM is 0.5 of the distance from the lateral malleolus (ankle to the metatarsal marker. Thus, the center of mass of the foot is
• x = (84.9 + 101.1) / 2 = 93.0 cm • y = (11.0 + 1.3) / 2 = 6.15 cm
• The thigh center of mass is 0.433 from the proximal end of the segment. Thus, the center of mass of the thigh is
• x = 72.1 + 0.433 (86.4 - 72.1) = 78.3 cm • y = 92.8 - 0.433 (92.8 - 54.9) - 76.4 cm

CENTRE OF MASS OF MULTI SEGMENT
Xo = (m1x1+ m2x2 + m3x3)/M
The same for Yo.
MASS MOMENT OF INERTIAMost body segment do not rotate about their mass center, but rather the joint at either end. The parallel axis theorem is used to calculate the moment of inertia in such cases.
I = Io + mx2
A Prosthetic leg has a mass of 3 kg and a center of mass of 20 cm from the knee joint. The radius of
gyration is 14.1 cm. Calculate I about the knee.
Io = 3(0.141)2 kg.m2
I = Io + mx2 = 0.06 + 3 (0.2)2

LINK SEGMENT MODEL
The process in which the reaction forces and muscle moments are
calculated is known as link segment modeling.

ANATOMICAL VS LINK SEGMENT MODEL.
Joints are replaced by hinge joints and segments are replaced by masses and moments of inertia located at each segment’s centre of mass.
It represents all the forces acting on the total body system itself.

JOINT REACTION FORCESIn analyzing a segments one at a time, we need to
calculate the reaction between segments.

FBD

BONE-ON-BONE FORCESConfusion between joint reaction and bone –
on-bone forces.Bone-on-bone forces: actual forces acting
on the articulating surfaces and include the effect of muscle activity.
100 100
FREE BODY DIAGRAM OF A SINGLE SEGMENT
Equations:
1. X direction
2. Y direction
3. About the segment COM

We can assume that Rx1, Rx2 are acting in the x direction and right direction is positive. Therefore the equation is
Rx1-Rx2=max
If everything is in static condition (standing without movement for example, then
Rx1-Rx2=max=0 or Rx1=Rx2
What are the forces acting in X directions (linear movement) in the single segment in previous slide?

What are the forces acting in Y directions (linear movement) in the single segment in previous slide?
We can assume that Ry1, Ry2 and weight are acting in the y direction and upward direction is positive. Therefore the equation is,
Ry1-Ry2-m1g=may
If everything is in static condition (standing without movement), then
Ry1-Ry2-m1g=may=0

Rotation at the top joint (point 1).
Assume that the length of the segment is a and this segment is tilting at angle α from vertical.
ΣM=I1ω
M1-M2 - Rx2.a sin α - Ry2 cos α - m1g (a/2) cos α = I1 ω
In static condition, the above equation is equal to 0.
M1-M2 - Rx2.a sin α - Ry2 cos α - m1g (a/2) cos α = 0.
α
Top segment length: a
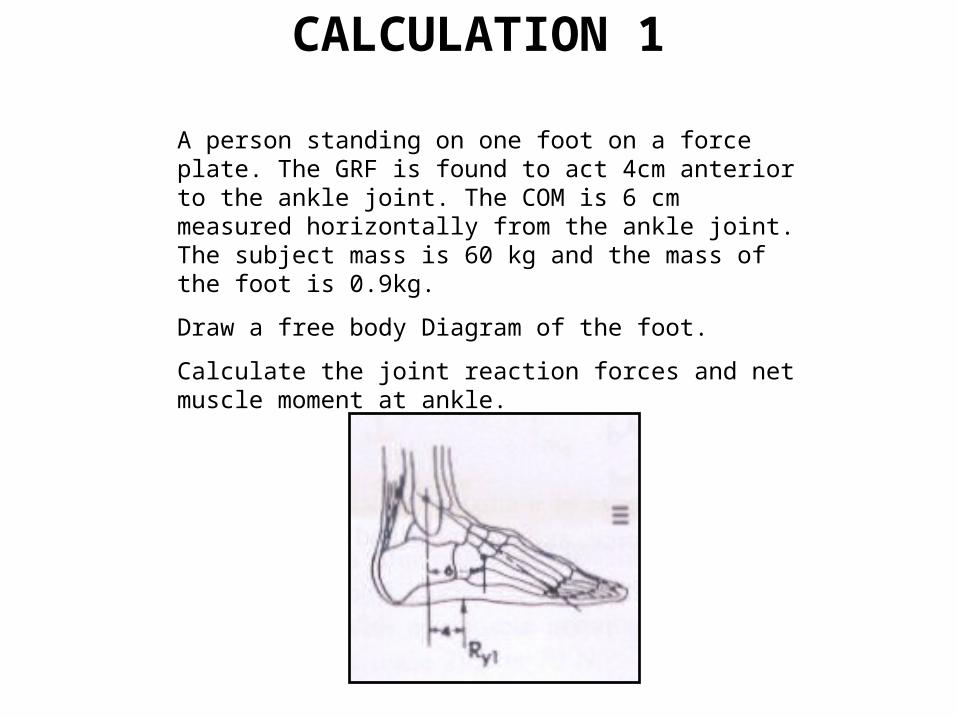
CALCULATION 1
A person standing on one foot on a force plate. The GRF is found to act 4cm anterior to the ankle joint. The COM is 6 cm measured horizontally from the ankle joint. The subject mass is 60 kg and the mass of the foot is 0.9kg.
Draw a free body Diagram of the foot.
Calculate the joint reaction forces and net muscle moment at ankle.