Thesis.dviANSWER SET PROGRAMMING WITH
CLAUSELEARNINGDISSERTATIONPresented in Partial Fulllment of the
Requirements forthe Degree Do tor of Philosophy in theGraduate S
hool of The Ohio State UniversityByJerey Alan Ward, B.A., B.S.,
M.S., M.S.* * * * *The Ohio State University2004Dissertation
Committee:Timothy J. Long, Co-AdviserJohn S. S hlipf, Co-AdviserEri
Fosler-LussierNeelam Soundarajan Approved
byCo-AdviserCo-AdviserDepartment of Computerand Information S ien
e
ii
ABSTRACT Answer set programming (ASP) is a knowledge representation
paradigm relatedto the areas of logi programming and nonmonotoni
reasoning. Many of the appli- ations for ASP are from the areas of
arti ial intelligen e{related diagnosis andplanning. The problem of
nding an answer set for a normal or extended logi program is
NP-hard. Current omplete answer set solvers are patterned after
theDavis-Putnam-Loveland-Logemann (DPLL) algorithm for solving
Boolean satisa-bility (SAT ) problems, but are adapted to the
nonmonotoni semanti s of answer setprogramming.Re ent SAT solvers
in lude improvements to the DPLL algorithm. Of spe ial notein this
regard is the in orporation of on i t lauses. A on i t lause
representsa ba ktra king solver's analysis of why a on i t o urred.
This analysis an beused to further prune the sear h spa e and to
dire t the sear h heuristi . The useof su h lauses has improved
signi antly the eÆ ien y of satisability solvers overthe past few
years, espe ially on stru tured problems arising from appli ations.
Inthis dissertation we des ribe how we have adapted on i t lause te
hniques for usein the answer set solver Smodels. We experimentally
ompare the performan e ofthe resulting program, Smodels , to that
of the original Smodels program. We also ompare the performan e of
Smodels with that of two other re ent answer set solvers,iii
ASSAT and Cmodels-2, whi h all satisability solvers dire tly, and
whi h take adierent approa h to adding lauses to onstrain an answer
set sear h.
iv
VITA February 11, 1961 . . . . . . . . . . . . . . . . . . . . . .
. . . . Born - Ft. Thomas, Kentu ky1984 . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .B.A.
Philosophy,B.S. Mathemati s,Northern Kentu ky University1987 . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . .M.S. Mathmati s,The Ohio State University1988 . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .M.S.
Computer and InformationS ien e,The Ohio State University1985-1993
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Graduate Tea hing Asso iate,Mathemati s and CIS Departments,The
Ohio State University1994-1996 . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . Assistant Professor,Department of
Mathemati s andComputer S ien e,College of Mount Saint
Joseph1996-1999 . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . Computer Game Programmer,PyroTe hnix, In .,Cin
innati, Ohio1999-2002 . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . Graduate Resear h Assistant,Department of Ele
tri al andComputer Engineering andComputer S ien e,University of
Cin innati
v
PUBLICATIONSResear h Publi ationsWolfgang W. Kue hlin and Jerey A.
Ward. \Experiments with Virtual C-Threads".Pro eedings of the
Fourth IEEE Symposium on Parallel and Distributed Pro essing,Ft.
Worth, Texas, De ember 1991.John Fran o, Mi hal Kouril, John S
hlipf, Jerey Ward, Sean Weaver, Mi hael Drans-eld, and Mark Van
eet. \SBSAT: A State-based, BDD-based Satisability Algo-rithm".
Theory and Appli ations of Satisability Testing: 6th International
Confer-en e (SAT 2003), Santa Margherita Ligure, Italy, May
2003.Jerey Ward and John S. S hlipf. \Answer Set Programming with
Clause Learn-ing", Pro eedings of Logi Programming and Nonmonotoni
Reasoning 7 (LPNMR-7),Ft. Lauderdale, Florida, January 2004.FIELDS
OF STUDYMajor Field: Computer S ien eStudies in:Logi and Logi
Programming Prof. John S. S hlipfProf. Wolfgang W. Kue hlinProf.
Timothy J. CarlsonTheory of Computation Prof. Timothy J.
LongComputer Algebra Prof. George C. Collins
vi
TABLE OF CONTENTS PageAbstra t . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . iiiVita . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vList of Tables . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . xList of Figures . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . xiiChapters:1. Introdu tion
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Answer Set Programming . . . . . . . . . . . . . . . . . . . .
. . . 11.2 Clause Learning . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 31.3 Contributions . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 42. Ba kground: Answer Set Programming
. . . . . . . . . . . . . . . . . . . 62.1 De larative Logi
Programming . . . . . . . . . . . . . . . . . . . . 62.1.1 Ground
Instantiations . . . . . . . . . . . . . . . . . . . . . 72.2
Answer Set Semanti s for Normal Logi Programs . . . . . . . . . .
92.3 Relationship to Classi al Boolean Satisability (SAT) . . . . .
. . . 142.3.1 Redu ing of SAT to ASP . . . . . . . . . . . . . . .
. . . . 162.3.2 Completion Semanti s . . . . . . . . . . . . . . .
. . . . . . 172.3.3 Expressing the Hamiltonian Cy le Problem . . .
. . . . . . 192.3.4 Unfounded Sets . . . . . . . . . . . . . . . .
. . . . . . . . . 242.3.5 Redu ing ASP to SAT . . . . . . . . . . .
. . . . . . . . . . 282.4 Extended Rules . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 282.5 Disjun tive Logi Programming
. . . . . . . . . . . . . . . . . . . . 34vii
3. Ba kground: Basi Sear h Algorithms for SAT and ASP . . . . . . .
. . 373.1 DPLL SAT algorithm . . . . . . . . . . . . . . . . . . .
. . . . . . 373.2 Smodels . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 403.2.1 Smodels' Inferen e Rules for Normal
Programs . . . . . . . 423.2.2 Smodels' Inferen e Rules for
Extended Programs . . . . . . 463.2.3 Lookahead-Based Heuristi . .
. . . . . . . . . . . . . . . . 493.2.4 Computing Multiple Answer
Sets . . . . . . . . . . . . . . . 513.2.5 Implementing Minimize
Statements . . . . . . . . . . . . . . 514. Con i t Clauses for SAT
and ASP . . . . . . . . . . . . . . . . . . . . . 544.1 Overview of
Con i t Clauses . . . . . . . . . . . . . . . . . . . . . 544.2
Relationship to Previous Work . . . . . . . . . . . . . . . . . . .
. 604.3 Generating the Impli ation Graph . . . . . . . . . . . . .
. . . . . 624.3.1 Generating the Impli ation Graph in a SAT Solver
. . . . . 624.3.2 Generating the Impli ation Graph in an ASP Solver
. . . . 664.3.3 An ASP Impli ation Graph Example . . . . . . . . .
. . . . 714.3.4 In orporating Extended Rules . . . . . . . . . . .
. . . . . . 764.4 Unique Impli ation Points . . . . . . . . . . . .
. . . . . . . . . . . 804.4.1 UIP-based Clause Generation
Strategies . . . . . . . . . . . 834.4.2 Finding UIPs . . . . . . .
. . . . . . . . . . . . . . . . . . . 854.5 Generating the Con i t
Clause . . . . . . . . . . . . . . . . . . . . 924.6 Using Con i t
Clauses in the Sear h . . . . . . . . . . . . . . . . . 944.6.1 Ba
kjumping . . . . . . . . . . . . . . . . . . . . . . . . . .
944.6.2 Serving as Additional Constraints . . . . . . . . . . . . .
. . 954.6.3 Sear h Heuristi s . . . . . . . . . . . . . . . . . . .
. . . . . 974.6.4 Restarts . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1014.6.5 Clause Deletion . . . . . . . . . . . .
. . . . . . . . . . . . . 1034.7 Computing Multiple Answer Sets . .
. . . . . . . . . . . . . . . . . 1064.7.1 Minimize statements . .
. . . . . . . . . . . . . . . . . . . . 1075. Answer Set Solvers
Whi h Call SAT Solvers Dire tly . . . . . . . . . . . 1085.1
Cmodels-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 1095.2 ASSAT . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1105.3 Cmodels-2 . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 1115.4 Comparison with Smodels . .
. . . . . . . . . . . . . . . . . . . . 112 viii
6. Experimental Results . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 1146.1 Boolean Satisability . . . . . . . . . . . . .
. . . . . . . . . . . . . 1176.2 Graph Coloring . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 1206.3 Hamiltonian Cy les . .
. . . . . . . . . . . . . . . . . . . . . . . . . 1226.4 Bounded
Model Che king . . . . . . . . . . . . . . . . . . . . . . . 1267.
Con lusions and Future Work . . . . . . . . . . . . . . . . . . . .
. . . . 1307.1 Con lusions . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 1307.2 Future work . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 1327.2.1 Disjun tive Logi
Programming . . . . . . . . . . . . . . . . 1327.2.2 In orporating
SAT Solvers . . . . . . . . . . . . . . . . . . . 132Appendi es:A.
Redu tions of ASP to SAT . . . . . . . . . . . . . . . . . . . . .
. . . . . 134A.1 Redu tions That In rease the Number of Atoms . . .
. . . . . . . . 134A.2 An Exponential Spa e Redu tion That Does Not
In rease the Num-ber of Atoms . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 136B. Weight Constraint Rules: Semanti s and
Translations . . . . . . . . . . . 140B.1 Formal Semanti s . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 140B.2 Translation
to Basi Rules . . . . . . . . . . . . . . . . . . . . . . . 142C.
Smodels Proof of Corre tness . . . . . . . . . . . . . . . . . . .
. . . . 144D. Smodels Proof of Completeness . . . . . . . . . . . .
. . . . . . . . . . 151E. Comparison of Hamiltonian Cy le Redu
tions . . . . . . . . . . . . . . . 154F. Experimental Results with
Lookahead Options in Smodels and Smodels 160Bibliography . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
ix
LIST OF TABLES Table Page2.1 Answer set for Hamiltonian y le
problem instan e . . . . . . . . . . 222.2 Completion semanti s
model for Hamiltonian y le problem instan e,with dieren es from
Table 2.1 highlighted. . . . . . . . . . . . . . . . 233.1
Davis-Putnam-Loveland-Logemann algorithm for SAT . . . . . . . . .
393.2 Smodels algorithm . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 413.3 Smodels' lookahead-based heuristi . . . . . . . .
. . . . . . . . . . . 524.1 Computing skip-to-depths . . . . . . .
. . . . . . . . . . . . . . . . . 914.2 Skip-to-depths of nodes
from example impli ation graph . . . . . . . 914.3 Finding the
losest UIP . . . . . . . . . . . . . . . . . . . . . . . . . 924.4
Computing a on i t lause . . . . . . . . . . . . . . . . . . . . .
. . 935.1 ASSAT algorithm . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 1116.1 Boolean satisability runtimes . . . . . . .
. . . . . . . . . . . . . . . 1196.2 Coloring runtimes . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 1216.3 Runtimes on
uniform Hamiltonian y le problems . . . . . . . . . . . 1246.4
Runtimes on lumpy Hamiltonian y le problems . . . . . . . . . . .
1266.5 Runtimes on lumpy Hamiltonian y le problems, Extended redu
tion 127x
6.6 Bounded model he king runtimes - step semanti s . . . . . . . .
. . 1286.7 Bounded model he king runtimes - interleaving semanti s
. . . . . . 129E.1 Runtime omparison of dierent Hamiltonian Cy le
redu tions . . . . 158E.2 Grounding omparison for dierent HC redu
tions . . . . . . . . . . . 158E.3 Grounding omparison for a larger
HC problem . . . . . . . . . . . . 159F.1 Lookahead results on
satisability problems . . . . . . . . . . . . . . 161F.2 Lookahead
results on oloring problems . . . . . . . . . . . . . . . . .
161F.3 Lookahead results on uniform Hamiltonian y le problems . . .
. . . 162F.4 Lookahead results on lumpy Hamiltonian y le problems .
. . . . . . 162F.5 Lookahead results on Bounded Model Che king -
step semanti s . . . 163F.6 Lookahead results on Bounded Model Che
king - interleaving semanti s164
xi
LIST OF FIGURES Figure Page2.1 A Hamiltonian y le problem instan e
. . . . . . . . . . . . . . . . . 222.2 The solution to the HC
problem instan e . . . . . . . . . . . . . . . . 232.3 A \solution"
under the ompletion semanti s . . . . . . . . . . . . . . 244.1 Rea
hing the rst on i t in a DPLL-based sear h . . . . . . . . . . .
564.2 Ba ktra king from the rst on i t . . . . . . . . . . . . . .
. . . . . 574.3 Situation after ba kjumping based on :a2 _ :a3 _
:a100 . . . . . . . 594.4 Impli ation graph for a single inferen e
. . . . . . . . . . . . . . . . . 634.5 A SAT-based impli ation
graph with on i t . . . . . . . . . . . . . . 644.6 Adding a on i t
edge . . . . . . . . . . . . . . . . . . . . . . . . . . 654.7
Impli ation graph involving unfounded set inferen es . . . . . . .
. . 704.8 Impli ation graph after hoosing a = true . . . . . . . .
. . . . . . . 724.9 Impli ation graph after inferring b by Modus
Ponens . . . . . . . . . 734.10 Impli ation graph after inferring :
from All Rules Can elled . . . . . 734.11 Impli ation graph after
inferring :d from Ba k hain True . . . . . . . 744.12 Impli ation
graph after inferring e from Ba k hain False . . . . . . .
74xii
4.13 Impli ation graph after unfounded set dete tion . . . . . . .
. . . . . 754.14 SAT impli ation graph example (Figure 4.6)
revisited . . . . . . . . . 824.15 A path from the hoi e node to a
on i t node . . . . . . . . . . . . . 874.16 Adjusting the on i t
node and orresponding path . . . . . . . . . . 884.17 Adding a on i
t edge to the adjusted on i t node . . . . . . . . . . 89
xiii
CHAPTER 1INTRODUCTION 1.1 Answer Set ProgrammingAnswer set
programming (ASP) is a knowledge representation paradigm relatedto
the areas of logi programming and nonmonotoni reasoning. In this
approa h,a problem is represented as a logi program whose models
under the answer setsemanti s onstitute solutions (answer sets).
The logi program representation istypi ally presented as input to
an answer set sear h engine, whi h sear hes for one ormore valid
models. The answer set semanti s was dened by Gelfond and Lifs hitz
[23as a generalization of their denition in [22 of the stable model
semanti s. The answerset/stable model semanti s is urrently the
leading de larative semanti s for logi programs.Many of the urrent
pra ti al appli ations of answer set programming are in theareas of
arti ial intelligen e{related diagnosis and planning ([34, [21, [2,
[51, [49,[11). Due to the expressive power of logi programs under
the answer set semanti s,appli ations have also been onsidered in
other areas su h as graph algorithms [49and bounded model he king
[28. 1
Answer set programming may be ompared to the widely used knowledge
repre-sentation approa hes that represent problems as lassi al,
propositional logi formu-las. The problem of nding a model for su h
a formula is essentially the well-knownsatisability testing problem
(SAT), whi h involves reasoning in a monotoni logi .There are
parallels between the way that reasoning is urrently done in answer
setprogramming and in SAT. Firstly, logi programs that are to be
tested for answer setsare normally \grounded" by a prepro essing
stage so that they, like SAT problems,are represented in a
propositional form before being presented to a sear h engine.Se
ondly, a solution to an answer set program, like a solution to a
SAT problem, onsists of a model whi h sets some of the atomi
propositions in the problem totrue, and the remaining atomi
propositions to false. Thirdly, omplete answer setsear h engines,
like omplete SAT sear h engines, are generally based on a
depth-rst,ba ktra king sear h patterned after the
Davis-Putnam-Loveland-Logemann (DPLL)algorithm [10, [9.However,
some ontrasts an be made between answer set programming and SATthat
motivate onsidering answer set programming as a useful alternative.
Someproblems seem to be representable asymptoti ally more on isely
as logi programsunder the answer set semanti s than they an be
represented as SAT formulas. Oneimportant advantage of this is
greater onvenien e for the user in representing theproblem.
Previous work has also suggested that this an result in a faster
sear hfor solutions on some problems. (See, for instan e,
experiments by Simons [53 onsolving Hamiltonian y le problems with
SAT and ASP solvers.) Although the SATde ision problem an easily be
redu ed in linear time to the problem of the existen e ofanswer
sets, there is no known way of redu ing answer set programming
problems to2
SAT without either (1) introdu ing a signi ant number of new atoms,
whi h ouldsubstantially in rease the size of the sear h spa e, or
(2) reating a representationthat, in the worst ase, is
exponentially large in terms of the size of the originalanswer set
programming representation.An important key to the ability of
answer set languages to express ertain problemssu in tly is the
prin iple of negation as failure, whi h is ommon to logi
program-ming formalisms. This prin iple states that, if a
proposition annot be \proven" fromthe rules given in the
program/database, then the proposition will be assumed to befalse.
The embodiment of this prin iple in the answer set semanti s adds
onsider-able expressive power and onvenien e to the paradigm, but
also results in answerset solvers having a onsiderably more omplex
set of inferen e rules than the set ofinferen e rules used in SAT
solvers.The problem of determining whether a normal logi program
has an answer set isNP- omplete [42. Thus, it is not surprising
that the task of omputing answer sets isoften omputationally
expensive in pra ti e. In order to expand the usefulness of
theanswer set programming paradigm, it will be very useful to
improve the eÆ ien y of urrent answer set sear h algorithms. This
is a topi of onsiderable urrent interestin the answer set
programming ommunity ([17,[40,[53,[24) and is the subje t ofthis
dissertation.1.2 Clause LearningPerhaps the most important
development over the past several years towardsmaking SAT solvers
more eÆ ient in solving pra ti al problems has been the use of on i
t lauses [3,[43. A on i t lause represents a ba ktra king solver's
analysis3
of why a on i t o urred during the sear h. This analysis an be used
to furtherprune the sear h spa e and to dire t the sear h heuristi
. Con i t lauses have beenespe ially useful in improving the eÆ ien
y of SAT solvers on stru tured problemsarising from appli ations.
The great majority of urrent, well-known, omplete SATsolvers, su h
as GRASP [43, rel sat [3, SATO [62, Cha [46, BerkMin [27, andSIMO
[26, on entrate their optimizations and heuristi s around eÆ iently
and ef-fe tively generating and using on i t lauses.1.3
ContributionsFor this dissertation we in orporate on i t lause
learning into one of the mostwidely used answer set solvers,
Smodels [50. The resulting program, Smodels [61, isable to use on i
t lauses to prune the sear h spa e and to dire t the sear h
heuris-ti . The fundamental new problem whi h we had to address in
order to a omplishthis on erned nding an algorithm to diagnose the
auses of on i ts in Smodels'sear h. The main hallenge in this
regard involved analyzing on i ts whi h resultedfrom negative
inferen es derived from Smodels' dete tion of unfounded sets.1
Thedete tion of unfounded sets is entral to Smodels' enfor ement of
the answer set se-manti s' version of negation as failure. Negative
inferen es derived from unfoundedsets result in a number of ompli
ations when performing a on i t diagnosis. Weoutline these ompli
ations in Se tion 4.3.2. However, our experimental results showthat
frequently testing for unfounded sets is riti al to obtaining good
performan eon ertain important problems.1The notion of an unfounded
set was dened by van Gelder, Ross, and S hlipf in [20. We dis ussit
in Se tion 2.3.4. 4
We ondu t empiri al tests omparing the performan e of Smodels to
that of theoriginal Smodels program. We also ompare the performan e
of Smodels to that oftwo other re ent high-performan e answer set
solvers, ASSAT and Cmodels-2. Thesetwo solvers instead take the
approa h of dire tly alling SAT solvers to perform themajority work
involved in an answer set sear h.The results of these tests show
that on i t lause learning an greatly improvethe runtime performan
e of an answer set solver su h as Smodels. This was evident
onproblems arising from appli ations (hardware veri ation and
bounded model he k-ing), and on randomly generated problems whi h
had a non-uniform data distribution(e.g., graph oloring where the
distribution of edges was \ lumpy").The most popular performan e
ben hmark for answer set systems over the pastseveral years has
been solving uniform, random Hamiltonian y le problems. In
thisdomain, Smodels had orders of magnitude better performan e than
any of the othersolvers whi h we tested.On so- alled \tight"
problems2, ASSAT and Cmodels-2 provided somewhat betterperforman e
than Smodels . This was expe ted sin e they all re ent, highly
opti-mized SAT solvers to perform the sear h, and tight problems
are easily redu ed toSAT.However, in our tests involving
\non-tight" problems, su h as the Hamiltonian y le problems
mentioned above, Smodels performed mu h better than ASSAT
andCmodels-2. On these problems, Smodels is able to provide tighter
pruning of thesear h spa e than ASSAT and Cmodels-2 be ause of the
test for unfounded sets whi hSmodels inherits from the original
Smodels solver.2See Denition 25 in Se tion 2.3.5 for the distin
tion between tight and non-tight problems.5
CHAPTER 2BACKGROUND: ANSWER SET PROGRAMMINGThis hapter provides ba
kground information on the area of Answer Set Pro-gramming. Nothing
in this hapter is new to this dissertation. Citations are
providedfor major denitions and results.2.1 De larative Logi
ProgrammingA logi program is a set of rules of the form' 1; : : : ;
nwhere '; 1; : : : ; n are formulas in some logi . In the above
general form, ' is referredto as the head of the rule and 1; : : :
; n is the rule's body. Intuitively, su h a rulesays that if all of
the formulas in the body of the rule are true, then the formula
atthe head of the rule must also be true. If n = 0 then we normally
omit writing the symbol. In su h a ase the rule simply states un
onditionally that ' is true.The basi task of a de larative logi
programming system is to answer questionsabout whi h fa ts are
implied by the logi program at hand, or to nd a set of fa tswhi h
would onstitute a model for the logi program. There are dierent
ways ofinterpreting these questions formally, whi h gives rise to
dierent logi programmingsemanti s. 6
2.1.1 Ground InstantiationsThe formulas whi h appear in a logi
program may in lude predi ates whi h takeone or more arguments, and
some of these arguments may be variables. The vari-ous de larative
logi programming semanti s generally treat a rule with variables
asrepresenting the set of ground instantiations of that rule. Thus
the meaning of alogi program with variables is redu ed to the
meaning of a logi program withoutvariables.Example 1 Assume that a,
b, and are treated as onstants and that X and Y aretreated as
variables.3 Consider the logi program P :Ar (a,b)Ar (b,
)Nonterminal(X) Ar (X,Y)The ground instantiation of this program
would be:Ar (a,b)Ar (b, )Nonterminal(a) Ar (a,a)Nonterminal(a) Ar
(a,b)Nonterminal(a) Ar (a, )Nonterminal(b) Ar (b,a)Nonterminal(b)
Ar (b,b)Nonterminal(b) Ar (b, )Nonterminal( ) Ar ( ,a)Nonterminal(
) Ar ( ,b)Nonterminal( ) Ar ( , )A pra ti al problem with reating a
ground instantiation is that its size may beexponentially large in
terms of the size of the original logi program. Most intelligent3It
is, in fa t, a ommon onvention in logi programming that arguments
whi h begin withlower ase letters are onstants, and arguments whi h
begin with upper ase letters are variables. Wewill adopt this
onvention throughout this dissertation.7
grounding programs try to produ e relatively small ground
instantiations, while stillpreserving the meaning of the original
program. For instan e, under the varioussemanti s whi h we will
onsider in this dissertation, it would be permissible to restri
tthe ground instantiation above to only the rules:Ar (a,b)Ar (b,
)Nonterminal(a) Ar (a,b)Nonterminal(b) Ar (b, )This is be ause it
is lear that the only instantiations of the Ar predi ate whi h an
be established based on the given program are Ar (a; b) and Ar (b;
).The methods used by the various grounding programs to ut down the
size ofthe ground instantiation may vary. However, the grounding
pro ess is not a entral on ern of this dissertation. For our
experiments in Chapter 6 we used the Lparseprogram[57 to reate
ground instantiations of our logi programs.The upshot is that, in
this dissertation, we will restri t our attention to
nite,propositional logi programs. The kinds of de ision problems
whi h one would usu-ally ask about a logi program, su h as whether
it has a model or whether it impliesa parti ular statement, are
generally de idable when the program is nite and
propo-sitional.4Sin e the arguments to the predi ates mentioned in
a ground instantiated programwill be onstants, we an view ea h
atomi proposition in the program as essentially a4In order to
ensure that the ground instantiation is nite, answer set grounders
make some restri -tions on how fun tion symbols and variable
symbols may be used in a program. These restri tionsmay vary from
system to system, but are not regarded as part of the ore denition
of the answerset semanti s. The interested reader may nd details on
Lparse's restri tions in [57 and [58. Innon-answer set logi
programming languages with less tight synta ti restri tions, su h
as Prolog,ground instantiations may be innite, and typi al de ision
problems, e.g., the Halting problem, areoften unde idable. 8
0-ary predi ate. Thus, the logi program above, after grounding,
might be expressedto a solver as follows: pqr ps q
2.2 Answer Set Semanti s for Normal Logi ProgramsIn the following
dis ussion, we will assume that Atoms is some xed set of atomi
propositions (0-ary predi ate symbols).Denition 1 (Horn program) A
Horn rule is a logi programming rule of the formh a1; : : : ;
anwhere h; a1; : : : ; an 2 Atoms. A Horn program is a olle tion of
Horn rules.We will denote the set of atoms mentioned in P by
Atoms(P ). Also, we willassume that the logi programs onsidered in
this dissertation have a nite numberof rules.Denition 2 (Model of a
Horn program) A model of a Horn program P is asubset M Atoms su h
that for every rule h a1; : : : ; an 2 P , a1; : : : ; an 2
Mimplies h 2M .Denition 3 (Minimum model) A minimum model of a
program P is a model ofP whi h is a subset of all other models of P
.9
If a program has a minimum model, then it has only one minimum
model. Animportant fa t is that every Horn program does have a
minimummodel. Furthermore,the minimum model of a Horn program an be
omputed by the following pro edure:MinimumModel(HornProgram P)f M
;while 9 rule R = h a1; : : : ; an 2 Psu h that a1; : : : ; an
2Mand h =2Mdo M M [ fhgreturn Mg Note, then, that the minimum model
of a Horn program P is therefore the dedu -tive losure of P , if we
view the rules of P as inferen e rules. The minimum modelis
generally taken to be the anoni al model of a Horn program. Using
suitable datastru tures, the runtime of the above pro edure is
linear in the size of P . (This wasshown by Dowling and Gallier in
[12, and the resulting version of the pro edure isknown as the
Dowling-Gallier algorithm). Thus, reasoning with Horn programs
iseasy from a omputational omplexity viewpoint.An important on ern
in logi programming resear h is how to deal with the pres-en e of
logi al negation operators in programs. The preeminent negation
operator inlogi programming is the not operator, also known as the
negation as failure operator.Denition 4 (Normal program) A normal
rule is a rule of the form:h a1; : : : ; an; not b1; : : : ; not
bmwhere h; a1; : : : ; an; b1; : : : ; bm 2 Atoms. A normal logi
program is a olle tion ofnormal rules. 10
Atom h is the head of the above rule, while a1; : : : ; an; not b1;
: : : ; not bm form therule's body. We refer to a1; : : : ; an as
the body's positive subgoals, and not b1; : : : ; not bmas its
negative subgoals. The logi programming semanti s whi h we onsider
will viewthe body of a rule as a set of subgoals: the order in whi
h the subgoals appear in thebody does not matter.The next two
denitions give the answer set semanti s for normal logi
programs,and therefore formally dene the meaning of the not
operator in the answer setprogramming paradigm.Denition 5 (Redu t)
Given a normal logi program P and a set S Atoms(P ),the redu t of P
by S, denoted P S, is the logi program obtained from P by
deleting1. ea h rule ontaining a negative literal not bi in its
body where bi 2 S, and2. all negative subgoals from the bodies of
the remaining rules.Note that the redu t P S is a Horn program, and
therefore has a (unique) minimummodel. The mapping whi h takes P
and S and produ es P S is alled the Gelfond{Lifs hitz transform.
This mapping is the key to the following denition.Denition 6
(Answer set) (Gelfond and Lifs hitz [22) If P is a normal logi
pro-gram, then a set S Atoms(P ) is an answer set for P if the
minimum model of P Sis equal to S.A normal logi program may have
zero, one, or more than one answer sets. Theproblem of determining
whether a grounded normal logi program has any answersets is NP-
omplete [42. 11
Example 2 The logi programa b, not b not not bhas two answer sets:
S1 = fa; bg and S2 = f g.Example 3 The logi programb not bhas no
answer sets.Note that if a normal logi program does not ontain the
not operator, then it isa Horn program and it has exa tly one
answer set, namely the minimum model.As suggested earlier, the not
operator in logi programs is used to express a formof negation
based on the prin iple of negation as failure. In other words, an
expressionof the form not a is satised if there is no eviden e for
the truth of a, i.e. it is notpossible to prove a. An answer set S
for a normal logi program P onstitutes atwo-valued logi al
interpretation of the atoms mentioned in P . Those atoms whi hare
onsidered to be true are those whi h are elements of S. Atoms not
in S are onsidered to be false. The atoms onsidered false in an
answer set S are exa tlythose atoms for whi h there is no proof
(spe i ally, no proof from P S). The atomswhi h are onsidered true
in S are exa tly those atoms whi h have proofs (from P S).The fa t
that P S is a Horn program (does not mention not) means that the
notionof whether an atom has a proof from P S is well-dened and
straightforward. 12
Classi al negationAnswer sets for normal logi programs are also
referred to as stable models, whi hwas the term used in the paper
where these notions were rst dened ([22). Theterm \answer set" was
used in [23, where the semanti s was extended to programsin
orporating the : operator.The : operator is often referred to as
the lassi al negation operator, whereas thenot operator is referred
to as the negation as failure operator. Informally, :a meansthat a
is false, whereas not a means that a does not have a proof. Synta
ti ally, themain dieren e is that the : operator is allowed in the
head of a rule, whereas thenot operator is not allowed in the head.
Thus, a rule su h as:a b; whi h says that \if b and are true, then
a is false" is allowed in an extended logi program [23. However, a
rule su h asnot a b; whi h says that \if b and are true, then a
does not have a proof" is not allowed.The interested reader may
refer to [23 for the semanti s and uses of the : operatorin answer
set programming. Typi ally, one would in lude lassi al negation if
onewanted to work with three- or four-valued logi al models rather
than two-valued(\true/false") models. For instan e, if : is used,
then a and :a are both treated asliterals whi h may belong to an
answer set M . If a 2 M , then a is regarded as truein the model.
If :a 2 M , then a is regarded as false. If neither a nor :a belong
toM , then the truth value of a is onsidered unknown. If both a and
:a belong to M ,then a represents a ontradi tion. 13
However, in [23, it was shown how programs involving both the not
and : op-erators ould easily be redu ed to normal programs (i.e.,
to programs whi h use notas the only negation operator). In fa t,
the Lparse program automati ally performsthis redu tion on all
programs involving :. Hen e, we will restri t our onsiderationof
negation operators to the not operator only.Integrity
onstraintsSometimes we would like to express in our logi program
that a set of onditionsis impossible. We an do this by writing an
integrity onstraint, whi h is simply arule with an empty
head.Example 4 The rule R = a; not bstates that no answer set of
the program an have both a = true and b = false.Formally, the rule
R above is dealt with by treating it as shorthand for the ruleR0 =
f a; not b; not fwhere f is a new atom introdu ed into the program
spe i ally for use, as above, inintegrity onstraints. The reader an
he k that the resulting program, whi h in ludesR0, annot have an
answer set with both a = true and b = false.2.3 Relationship to
Classi al Boolean Satisability (SAT)One of the useful features
(alluded to in Se tion 2.1.1) of answer set systems isthat they
allow the user to write predi ates whi h an take variables as
arguments.14
As we will see, this greatly helps to make it onvenient to express
problems in ananswer set language. Answer set systems also
generally provide a ri her syntax thanmerely normal logi programs.
For example, the Lparse and Smodels systems providethe \extended
rules" whi h we will onsider in Se tion 2.4. These are some of
thestrengths of answer set programming over lassi al Boolean logi
as a knowledgerepresentation paradigm.However, for the remainder of
this se tion we will restri t our attention to a om-parison of
grounded normal logi programs interpreted under the answer set
semanti sversus lassi al Boolean logi expressions (written, say, in
onjun tive normal form)interpreted under the usual semanti s in
that domain. It turns out that even withthese restri tions, the
answer set programming paradigm has a signi ant advantageover lassi
al Boolean logi when it omes to expressing problems on isely and
on-veniently. This advantage omes from the way in whi h the answer
set semanti s em-bodies the prin iple of negation as failure. In
pra ti e, one of the payos of negationas failure in the answer set
semanti s is that it allows us to write indu tive denitionsof predi
ates. We will see an instan e of this in Se tion 2.3.3, where we
express theHamiltonian y le problem as an answer set problem.
Expressing indu tively denedpredi ates tends to be mu h more diÆ
ult in lassi al Boolean logi .Before we look at that example, we
will onsider the problem of redu ing lassi alBoolean logi problems
to answer set programming problems (Se tion 2.3.5). We labelthe
respe tive de ision problems as SAT and ASP. We re all that both
SAT and ASPare NP- omplete. Later, in Se tion 2.3.5, we will
onsider the problem of redu ingASP to SAT. We will see that it
seems to be mu h easier to devise a on ise, pra ti alredu tion of
SAT to ASP than to do the reverse. We will see how this relates to
the15
negation as failure prin iple. This motivates onsidering the answer
set paradigmas an alternative to lassi al Boolean logi on ertain
problems. It is also relevantto understanding the dieren es between
our approa h with Smodels (dis ussed inChapter 4), and the approa h
of answer set solvers whi h all SAT solvers dire tly(Chapter
5).2.3.1 Redu ing of SAT to ASPRedu ing SAT to ASP is rather
simple, as we will see below.Denition 7 (Literal) A literal is an
expression of the form a or :a, where a isan atom (proposition
letter).In the above denition, a is a positive literal, and :a is
an negative literal.Denition 8 (Clause) A lause is a disjun tion of
literals.Denition 9 (Conjun tive Normal Form) A Boolean statement
is in onjun -tive normal form (CNF) if it is expressed as the onjun
tion of a set of lauses.Example 5 The Boolean expression(a _ b) ^
(a _ :b) ^ (:a _ :b _ )is in onjun tive normal form.Suppose S is a
formula written in onjun tive normal form. We onstru t a
orresponding normal logi program P as follows:1. For ea h atom a
appearing in S, in lude atoms a and a0 in P , along with therules
16
a not a0a0 not a2. For ea h lause C = a1_ : : :_am_:b1_ : : :_:bn
in S, in lude in P the integrity onstraint not a1; : : : ; not am;
b1; : : : ; bnThen M has a satisfying assignment if and only if P
has an answer set.Two favorable properties are evident in the above
redu tion. First, the size ofthe resulting logi program is linear
in the size of the original CNF formula, with arather small
expansion fa tor. Se ondly, although the redu tion doubles the
numberof atoms whi h were in the original problem, the new atoms do
not a tually addto the size of the sear h spa e whi h needs to be
onsidered. That is, for any ofthe ommonly used answer set solvers,
if a truth value is assigned to atom a at anytime in the sear h,
the solver an immediately infer the opposite truth value for a0from
the rules given above. Likewise, if the solver assigns a truth
value for a0, it animmediately infer the opposite truth value for
a. As a result, the new atoms whi hare introdu ed by this redu tion
do not in rease the number of hoi es whi h wouldneed to be made in
the sear h for a solution to a problem instan e.2.3.2 Completion
Semanti sBefore onsidering redu tions of ASP to SAT, we will look
at a semanti s fornormal logi programs whi h is dened in terms of
lassi al Boolean logi . Under-standing the relationship of the
answer set semanti s to the ompletion semanti s17
helpful in understanding the redu tions of ASP to SAT, is parti
ularly relevant tounderstanding the approa h of the solvers dis
ussed in Chapter 5.Denition 10 (Program Completion) Let P be a
normal logi program. Foratom h 2 Atoms(P ) let 'h be the
propositional formulah$ Wfa1 ^ : : : ^ an ^ :b1 ^ : : : ^ bm j h
a1; : : : ; an; not b1; : : : ; not bm 2 PgThen the ompletion of P
, denoted Comp(P ), is the formula Vf'hjh 2 Atoms(P )g.An
interpretation M is said to be a model of P under the ompletion
semanti sif it satises Comp(P ). This semanti s is due to Clark [7.
It is easy to he k thatevery model of P under the answer set
semanti s is a model of P under the ompletionsemanti s. However,
the onverse is false:Example 6 a bb aThe ompletion of the pre eding
program is the Boolean logi statement(a$ b) ^ (b$ a):Thus the
program has two models under the ompletion semanti s: M1 = fg andM2
= fa; bg. However, M1 is the only answer set of P .Both the
ompletion semanti s and the answer semanti s embody the prin iple
ofnegation as failure, whi h states that an atom will be onsidered
false if and only if it annot be proven true. However, the answer
set semanti s, interpretes this prin iple18
more stri tly. That is, the answer set semanti s pla es a tighter
restri tion on whatkind of proof is permitted to justify the
assertion of an atomi proposition.To see this, suppose that we have
a normal logi program P and we wish to he k whether a parti ular
interpretation I is a model of P under the answer set and ompletion
semanti s, respe tively. Let I+ = fa 2 Atoms(P ) : a is true in I
g. LetI = f:a : a 2 Atoms(P ), a is false in I g. Then from
Denition 6 we an see thatI is an answer set of P if and only if I+
is exa tly the dedu tive losure of I [ P .On the other hand, I is a
model of the ompletion of P if and only if I+ is exa tlythe dedu
tive losure of I+ [ I [ P . Thus, under the ompletion semanti s,
theelements of I+ an be used as assumptions to prove the elements
of I+. This meansthat atoms whi h are asserted true in ompletion
semanti s models may have ir ularjusti ations.Su h ir ular proofs
are not allowed as justi ations under the answer set seman-ti s.
Example 6 gave an instan e of this distin tion. We give another
illustratingexample in Se tion 2.3.3.2.3.3 Expressing the
Hamiltonian Cy le ProblemSuppose that we wish to express in a
normal logi program the problem of ndinga Hamiltonian y le in a
dire ted graph. As is often the ase in logi programming,we will
express the problem in two parts. The rst part of our program,
alled theintentional database (IDB), onsists of a set of rules
(typi ally involving variables)whi h express the logi of the
problem. The se ond part of the program, the exten-sional database
(EDB), will onsist of the set of fa ts (expressed as rules with
emptybodies) whi h determine a parti ular instan e of the problem.
In the ase of the19
Hamiltonian y le problem, the IDB will onsist of a set of rules whi
h spe ify thata Hamiltonian y le is a set of edges whi h form a
path whi h starts from an initialnode, visits every node exa tly on
e, and returns to the initial node.The following is an IDB similar
to one given by Niemela [48 for the Hamiltonian y le problem:% Sele
t edges for the y leh (X;Y ) not h 0(X;Y ); edge(X;Y )h 0(X;Y ) not
h (X;Y ); edge(X;Y )% Ea h vertex has at most one in oming edge in
a y le h (X1; Y ); h (X2; Y ); edge(X1; Y ); edge(X2; Y ); vertex(Y
);X1 6= X2% Ea h vertex has at most one outgoing edge in a y le h
(X;Y1); h (X;Y2); edge(X;Y1); edge(X;Y2); vertex(X); Y1 6= Y2:%
Every vertex must be rea hable from the initial vertex% through the
hosen h edges. vertex(X); not r(X)r(Y ) h (X;Y ); edge(X;Y );
initialvertex(X)r(Y ) h (X;Y ); edge(X;Y ); r(X)Of spe ial signi an
e in this redu tion is the rea hability predi ate, r. r(Y )means
that Y is rea hable from the initial vertex. Note that r is dened
indu tivelyin this program. The rules state how to prove that the r
predi ate is true. It is notne essary to state when the r predi ate
is false: By the prin iple of negation as failure,it is assumed
that if r(Y ) annot be proven true based on the above rules, then
r(Y ) isfalse. The problem of expressing the rea hability relation
is what seems to make theHamiltonian y le problem diÆ ult to
express on isely in lassi al Boolean logi .(See Simons [53 for some
experiments ontrasting solving the Hamiltonian y leproblem with an
answer set solver versus solving it with SAT solvers. He was ableto
obtain mu h smaller redu tions, and mu h better runtimes with the
answer setapproa h.) 20
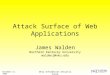
Now, suppose that the parti ular instan e at hand is the dire ted
graph shown inFigure 2.1. Then a orresponding EDB would
be:initialvertex(1)vertex(1)vertex(2)vertex(3)vertex(4)vertex(5)vertex(6)vertex(7)vertex(8)edge(1;
2)edge(2; 4)edge(3; 1)edge(4; 3)edge(4; 6)edge(5; 3)edge(5;
6)edge(6; 8)edge(7; 5)edge(8; 7)Our program P will be the grounding
of the union of the above IDB and EDB.From the perspe tive of
feasibly solving HC problems, a very ni e feature of the aboveredu
tion is that that the size of the grounded program P will be linear
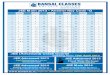
in the sizeof the graph being represented.There is only one answer
set to the above program, and it is given in Table 2.1.This answer
set orresponds to hoosing the set of edges highlighted in Figure
2.2,whi h is the only set of edges from this graph that yields a
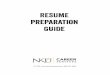
Hamiltonian y le.Table 2.2 gives an interpretation whi h is a model
of the program under the ompletion semanti s. The orresponding set
of edges is highlighted in Figure 2.3.Label the answer set given in
Table 2.1 M , and the ompletion semanti s modelgiven in Table 2.2 N
. We will again take spe ial note of the rea hability predi ater.
r(X) had to be true for every vertex X in ea h model, be ause of
the integrity21
1 2
3 4
5 6
7 8Figure 2.1: A Hamiltonian y le problem instan e
initialvertex(1)vertex(1) edge(1; 2) h (1; 2) r(1)vertex(2) edge(2;
4) h (2; 4) r(2)vertex(3) edge(3; 1) h (4; 6) r(3)vertex(4) edge(4;
3) h (6; 8) r(4)vertex(5) edge(4; 6) h (8; 7) r(5)vertex(6) edge(5;
3) h (7; 5) r(6)vertex(7) edge(5; 6) h (5; 3) r(7)vertex(8) edge(6;
8) h (3; 1) r(8)edge(7; 5) h 0(4; 3)edge(8; 7) h 0(5; 6)Table 2.1:
Answer set for Hamiltonian y le problem instan e
22
1 2
3 4
5 6
7 8Figure 2.2: The solution to the HC problem instan e
initialvertex(1)vertex(1) edge(1; 2) h (1; 2) r(1)vertex(2) edge(2;
4) h (2; 4) r(2)vertex(3) edge(3; 1) h 0(4;6) r(3)vertex(4) edge(4;
3) h (6; 8) r(4)vertex(5) edge(4; 6) h (8; 7) r(5)vertex(6) edge(5;
3) h (7; 5) r(6)vertex(7) edge(5; 6) h 0(5;3) r(7)vertex(8) edge(6;
8) h (3; 1) r(8)edge(7; 5) h (4;3)edge(8; 7) h (5;6)Table 2.2:
Completion semanti s model for Hamiltonian y le problem instan e,
withdieren es from Table 2.1 highlighted. 23
1 2
3 4
5 6
7 8Figure 2.3: A \solution" under the ompletion semanti s onstraint
vertex(X); not r(X). It is not hard to he k that ea h r(X) is in
thededu tive losure of M [ P , for X = 1; : : : ; 8.However, as we
turn our attention to N , we observe that r(5); : : : ; r(8) are
notprovable from N [ P . The only way to justify r(5); : : : ; r(8)
from N is by usingelements of N+ as assumptions. Spe i ally, r(5);
: : : ; r(8) an be proven only by a ir ular sequen e of dedu
tions.We will return to this example in the next se tion.2.3.4
Unfounded SetsDenition 11 (Partial Interpretation) Let P be a logi
program. A (partial) in-terpretation (on P ) is a set of literals
mentioning only atoms from Atoms(P ). 24
A (partial) interpretation I on P is onsidered total if every
element of Atoms(P )o urs in some element of I.For example, if
Atoms(P ) = fa; b; g, then I1 = fa;: g is a partial
interpretationon P and I2 = fa; b;: g is a total interpretation.
Informally, we onsider a partialinterpretation to be a set of
assertions about whi h atoms are true, and whi h atomsare false in
a model of P . For instan e, based on the above, we may write I1(a)
= true,I1( ) = false, and I1(b) = unknown.5 Also, if, for some atom
d, both d and :dare members of an interpretation I, then I is in
onsistent and we may write bothI(d) = true and I(d) = false.6
(Partial) interpretations are sometimes referred to as(partial)
truth assignments.We denote the positive (resp., negative) elements
of I by I+ (resp., I). In theexample above, I+2 = fa; bg and I2 =
f: g. We always have I = I+ [ I. And I is onsistent if Atoms(I+) \
Atoms(I) = ;.We say that an interpretation J extends an
interpretation I if I J .Suppose P is a logi program and S Atoms(P
). Then the total interpretationon P orresponding to S is M+ [M
where M+ = S and M = Atoms(P ) n S.Likewise, a total interpretation
M orresponds to the set of atoms M+. If westate that an
interpretationM is an answer set of a normal program P then we
meanthat (1) M is a total interpretation on P , and (2) M+ is an
answer set of P underdenition 6.The following denition is due to
Van Gelder, Ross, and S hlipf [20:5In the literature, I1(b) =
unknown is often written I1(b) = ?.6This situation is sometimes
expressed by the equation I(d) = >. 25
Denition 12 (Unfounded Set) Let P be a normal logi program and I a
partialinterpretation on P . Then H Atoms(P ) is said to be
unfounded with respe t to Pand I if for every rule R of P with head
h 2 H we have at least one of the following onditions:1. there is a
negative subgoal 'not d' in the body of R su h that I(d) = true,2.
there is a positive subgoal ' ' in the body of R su h that I( ) =
false, or3. there is a positive subgoal ' ' in the body of R su h
that 2 H.Example 7 Let P be the logi program from Se tion 2.3.3 whi
h expresses the Hamil-tonian y le problem instan e given in Figure
2.1. Let I = f:h (4; 6)g. ThenH = fr(5); r(6); r(7); r(8)g is
unfounded with respe t to P and I.Observe that if H is unfounded
with respe t to P and I, and interpretation Jextends I, then H is
unfounded with respe t to P and J .The following proposition is an
immediate orollary to Theorem 6.1 in [20. How-ever, we prove the
result dire tly here.Proposition 1 (Van Gelder, Ross, and S hlipf
[20) Let P be a normal logi program and I a partial interpretation
of Atoms(P ). Let H Atoms(P ) be un-founded with respe t to P and
I. Let M be a onsistent, total interpretation of Pwhi h extends I,
su h that M+ is an answer set of P . Then M+ \ H = ; (i.e.,
Minterprets every element of H as false).Proof: Sin e M+ is an
answer set of P , we have M+ = Dedu tiveClosure(PM+).We will show
that H \Dedu tiveClosure(PM+) = ; by indu ting on the length of
a26
derivation D = [b1; : : : ; bn from PM+. So we take as our indu
tion hypothesis thatbi =2 H for 1 i < n. For the sake of showing
a ontradi tion, suppose that bn 2 H.Let RM+ = bn 1; : : : ; mbe the
rule from PM+ used to derive bn in D. Then in P there is a
orresponding ruleR = bn 1; : : : ; m; not d1; : : : ; not dqwhere
ea h di =2 M+. Sin e H is unfounded with respe t to P and I, we
have threepossible ases for R:1. di 2 I M , for some 1 i q. This is
not possible sin e it ontradi ts ourassumption about R.2. : i 2 I M
, for some 1 i m. Sin e RM was used to dedu e bn in D, i = bj for
some 1 j < n. Thus, i is in the dedu tive losure of PM+, andis
therefore in M+. This ontradi ts M being onsistent. Thus this ase
isimpossible.3. i 2 H, for some 1 i m. Again, sin e RM was used to
dedu e bn in D, i = bj for some 1 j < n. But our indu tion
hypothesis was that no su h bjwas an element of H. Hen e, this ase
is also impossible.We on lude that bn =2 H, whi h ompletes the indu
tive proof. Example 8 Let P , I, and H be as in Example 7. Let N be
the set of atoms givenin Table 2.2, whi h onstituted a model of P
under the ompletion semanti s. If we onsider the total
interpretation M on P su h that M+ = N , we see that M extendsI,
but M+ \H 6= ;. Hen e, by Proposition 1, N =M+ is not an answer set
of P .27
In summary, if I is a partial interpretation of P , the set of
atoms U is unfoundedwith respe t to I, and we hope to extend I to
an answer set of P , then we will needto ensure that every element
of U is interpreted as false in the extension. Dete tingunfounded
sets early in the sear h will be one of the key issues as we
onsider dierentapproa hes to sear hing for answer sets.2.3.5 Redu
ing ASP to SATWe saw in Se tion 2.3.1 that it is straightforward to
redu e the Boolean satis-ability problem to the problem of nding an
answer set for a normal logi program.We ited some ni e pra ti al
properties of the redu tion given there. Spe i ally,the redu tion
did not in rease the size of the representation mu h, and the new
rep-resentation did not in lude any new atoms whi h would require
extra hoi e pointsin a sear h for a model. The task of redu ing
answer set programming problems toSAT problems is less
straightforward, and has been studied in various papers. Wedivide
su h redu tions into two lasses: (1) those redu tions whi h operate
in poly-nomial time, but whi h signi antly in rease the number of
atoms in the problemrepresentation, and (2) those whi h do not in
rease the number of atoms, but whi hexponentially in rease the
representation size. Be ause the known redu tions fall intoeither
of these two types, it presently does not seem to be feasible, in
general, to solvean ASP problem by rst redu ing the problem to SAT
and then alling a SAT solver.We present examples of ASP-to-SAT redu
tions in Appendix A.2.4 Extended RulesCertain ideas are diÆ ult to
express on isely in normal logi programs. Anexample would be a
onstraint whi h says that from a set of n atoms, fa1; : : : ;
ang,28
at least k atoms must be true. Or, suppose that the edges in a
graph have variousweights, and we wish to express that a
Hamiltonian y le whi h is hosen throughthe graph is to have at most
a ertain total weight.In order to make expressing su h onstraints
feasible, Simons, Niemela, and Soini-nen [54 introdu ed weight
onstraint rules, whi h are implemented in Lparse andSmodels. We
summarize their denitions below.Denition 13 (Weight Constraint) A
weight onstraint is an expression of theform l fa1 = wa1 ; : : : ;
an = wan ; not b1 = wb1 ; : : : ; not bm = wbmg uwhere ea h ai and
bj is an atom; and l, u, and ea h wx is a real number.7In the above
denition, l and u are alled the lower and upper bounds of the
onstraint, respe tively. Ea h w term in the above expression is a
weight. Intuitively,the onstraint says that W , the sum of the
weights of the satised ai and not bjexpressions, satises the
inequality l W u. Either of the bounds may be omittedfrom the
onstraint. A missing lower bound in the weight onstraint is taken
toindi ate a lower bound of 1. Similarly, the default upper bound
is +1.Denition 14 (Weight Constraint Rule) A weight onstraint rule
is an expres-sion of the form C0 C1; : : : ; CnA weight onstraint
rule program is a program onsisting of weight onstraintrules.
Appendix B, Se tion B.1 gives the formal denition of an answer set
for aweight onstraint rule program.7In Smodels, l, u, and the wx
terms are all restri ted to integers.29
Useful shorthand notationThe notation given below (all of whi h
omes from [54) provides some usefulshorthand for some ommonly
utilized weight onstraint rule onstru ts. Of parti ularrelevan e to
the implementation of the Smodels program, the grounding
programLparse translates any weight onstraint rule program into a
program onsisting onlyof the types of rules whi h we des ribe below
in this subse tion. Thus, handlingthese rule types is suÆ ient for
Smodels to deal with arbitrary weight onstraint ruleprograms.A
ardinality onstraint is an expression of the forml fa1; : : : ; an;
not b1; : : : ; bmg uwhi h is shorthand for the following weight
onstraint with all weights equal to one:l fa1 = 1; : : : ; an = 1;
not b1 = 1; : : : ; not bm = 1g u:A weight rule is a rule of the
formh l fa1 = wa1 ; : : : ; an = wan ; not b1 = wb1; : : : ; not bm
= wbmgwhere l and all of the weights are non-negative. This is a
shorthand for the rule1 fh = 1g l fa1 = wa1 ; : : : ; an = wan ;
not b1 = wb1; : : : ; not bm = wbmg:A hoi e rule is a rule of the
formfh1; : : : ; hkg a1; : : : ; an; not b1; : : : ; not bmand is
shorthand for0 fh1 = 1; : : : ; hk = 1g n+m fa1 = 1; : : : ; an =
1; not b1 = 1; : : : ; not bm = 1g:30
Informally, a rule of this form states that if a1; : : : ; an are
true and b1; : : : ; bm are false,then any of h1; : : : ; hk may be
true.A ardinality rule8 is a rule of the formh k fa1; : : : ; an;
not b1; : : : ; bmgand orresponds toh k fa1 = 1; : : : ; an = 1;
not b1 = 1; : : : ; not bm = 1g:Thus a ardinality rule is shorthand
for a weight rule with weights all equal to one.A normal rule is a
rule of the formh a1; : : : ; an; not b1; : : : ; not bmand
orresponds toh n+m fa1 = 1; : : : ; an = 1; not b1 = 1; : : : ; not
bm = 1g:This formal denition of a normal rule in terms of weight
rules results in the samesemanti s for normal rules as that given
in Denition 6.An integrity onstraint is a rule of the form a1; : :
: ; an; not b1; : : : ; not bmand orresponds tof n+m + 1 fa1 = 1; :
: : ; an = 1; not b1 = 1; : : : ; not bm = 1; not f = 1gwhere f is
a new atom used only in integrity onstraints.8In the Lparse user's
manual, and in the Smodels sour e ode, ardinality rules are
referred toas \ onstraint rules". 31
In their paper, Simons, Niemela, and Soininen show how to translate
arbitraryweight onstraint rule programs rules into programs using
only weight rules and hoi erules. (We outline their translation in
Appendix B, Se tion B.2.) Lparse uses asimilar approa h whereby it
translates arbitrary weight onstraint rule programs intoprograms
onsisting only of weight rules, hoi e rules, ardinality rules, and
normalrules. Separate data stru tures and lasses are used by
Smodels to deal with ea h ofthese four rule types.Conditional
literalsConditional literals are relevant only to logi programs
with variables. They pro-vide a onvenient way to express to the
grounding program (su h as Lparse) how thevariables mentioned in a
onstraint may be grounded.A onditional literal is an expression of
the form p : d where p is a predi ate or apredi ate pre eded by the
not operator. d is the onditional part of the literal, andalso must
be a predi ate. The : operator in the literal may be read as \su h
that".The grounding program reates from the p : d expression
groundings of p su h that dis true.For example, re all the
extensional database for the Hamiltonian y le probleminstan e in Se
tion
2.3.3:initialvertex(1)vertex(1)vertex(2)vertex(3)vertex(4)vertex(5)vertex(6)vertex(7)vertex(8)edge(1;
2) 32
edge(2; 4)edge(3; 1)edge(4; 3)edge(4; 6)edge(5; 3)edge(5; 6)edge(6;
8)edge(8; 7)edge(8; 7)Given that the EDB uses the predi ates
\vertex" and \edge" as shown above,then the statement 1 fh (X; Y )
: edge(X; Y )g 1 vertex(Y )expresses that every vertex Y must have
exa tly one in oming edge satisfying the\h " predi ate.The
onditional predi ate d is used to determine whi h groundings of p
are allowed.Therefore, for any ground instan e of d0 of d, it
should be well-dened whether d0 istrue or false. That is, it should
not be the ase that d0 is true in some models of theprogram and
false in others. Also, it should be omputationally easy to
determinewhether d0 is true or false, sin e this needs to be
determined by the grounding programbefore the ground instantiation
is given to the answer set solver.In [54, Simons, Niemela, and
Soininen enfor e this restri tion by stating that dmust be what a
refer to as a domain predi ate. Domain predi ates are su h that,
ifwe restri t a logi program to only those rules whi h dene domain
predi ates, thenthe resulting program will have a unique, easily
omputed answer set.99The denition of what qualies as a domain predi
ate for Lparse has hanged over time. Theinterested reader may refer
to the Lparse manual [57 and to a paper by Syrjanen [58. In
thisdissertation, we will use as onditional predi ates only predi
ates whi h are dened by the program'sextensional database (EDB).
Sin e all rules in the EDB have empty bodies, su h predi ates
ertainlyqualify as domain predi ates. Note also that the grounding
phase is not the part of the solutionnding pro ess where our
ontribution lies. 33
Minimize statementsA minimize statement is a statement of the
formminimizefa1 = wa1 ; : : : ; an = wan ; not b1 = wb1 ; : : : ;
not bm = wbmg:Su h a statement asks the solver to nd an answer set
whi h minimizes the totalweight of the satised subgoals listed
inside the bra es. If more than one minimizestatement is given in a
logi program, then the olle tion of minimize statementsindu e a
lexi ographi ordering on the answer sets of the program. Under this
order-ing, minimize statements whi h o ur earlier in the program
are taken to be moresigni ant.The maximize statementmaximizefa =
wa; not b = wbgis shorthand for minimizefa = wa; not b = wbg.2.5
Disjun tive Logi ProgrammingA disjun tive rule diers from a normal
rule in that it may ontain a disjun tionof atoms in its head. Thus
a disjun tive rule is a rule of the form:h1 _ : : : _ hk a1; : : :
; an; not b1; : : : ; not bmwhere h1; : : : ; hk; a1; : : : ; an;
b1; : : : ; bm 2 Atoms. A disjun tive logi program is a olle tion
of disjun tive rules. The answer set semanti s for disjun tive
programswas dened by Gelfond and Lifs hitz in [23. The relevant
denitions parallel thedenitions by whi h the same authors dened the
answer set semanti s for normalprograms. We provide their denitions
below.34
A disjun tive program is positive if none of the rules involve the
not operator. Aset of atoms M is a model of a positive ruleh1 _ : :
: _ hk a1; : : : ; anif M is a model of the lassi al logi
formula(a1 ^ : : : ^ an)! (h1 _ : : : _ hk):If P is a disjun tive
program whi h onsists of positive rules only, thenM is an answerset
of P if M is a minimal model of P . \Minimal model" means that M is
a modelof every rule of P , and no stri t subset of M is a model of
every rule of P .The (Gelfond-Lifs hitz) redu t, PM , of a disjun
tive program is onstru ted fromP and M just as it is in the ase of
a normal program:1. Remove every rule whi h has a subgoal of the
form not b where b 2M , and2. Remove every negative subgoal from
the resulting program.Note that, for an arbitrary disjun tive
program P , PM is positive. Hen e, whethera set is an answer set of
PM is dened above.Denition 15 (Answer Set of a Disjun tive Program)
Let P be an arbitrarydisjun tive logi program. Then a set M is an
answer set of P if it is an answer setof PM .The question of
whether a disjun tive program has an answer set is P2 - omplete
[15.Disjun tive logi programming systems generally ompute answer
sets through atwo phase guess-and- he k pro ess whi h works as
follows:35
1. (Guess Phase) Sear h for a set of atoms M whi h is a model of
its own redu tPM .2. (Che k Phase) Determine whether there is a set
M 0 ( M su h that M 0 is alsoa model of PM . M is an answer set of
P i no su h M 0 exists.The leading solver for disjun tive logi
programming for the past several yearshas been DLV [13. A re ent
system, GnT (\Guess 'n' Test") [30, performs theguess and he k
phases above by reating normal program instan es from the
originaldisjun tive problem. GnT makes su essive alls to the
Smodels solver to solve thesenormal instan es until an answer set
has been determined for the original problem.
36
CHAPTER 3BACKGROUND: BASIC SEARCH ALGORITHMS FORSAT AND ASP This
hapter provides ba kground information on the
Davis-Putnam-Loveland-Logemann (DPLL) algorithm, whi h sear hes for
satisfying assignments to Booleanformulas. It also des ribes in
some detail the answer set sear h program Smodels,whose high-level
stru ture is based on DPLL. Here, again, nothing in this hapter
isnew to this dissertation. However, it sets the stage for Chapter
4, where we des ribehow others have used on i t lause learning to
improve the eÆ ien y of DPLL, andalso where we des ribe how we have
adapted on i t lause learning to Smodels to reate the program
Smodels .3.1 DPLL SAT algorithmCurrent algorithms whi h sear h for
satisfying assignments to lassi al Booleanlogi formulas an be pla
ed into either of two broad ategories: omplete methodsor in omplete
methods. Complete methods are those methods whi h, in prin iple,are
guaranteed to return a satisfying assignment if the problem has
one, or a messagewhi h states that the problem is unsatisable if no
satisfying assignment exists. Thein omplete methods sear h for a
solution to the given problem instan e but are not37
guaranteed to return a result if the instan e is unsatisable. So an
in omplete methodmay in prin iple run forever if no satisfying
assignment exists.In omplete methods for SAT usually employ some
kind of lo al, hill- limbingsear h. GSAT [52 was a pioneering
solver in this ategory.In this dissertation we will only deal with
omplete methods for solving SAT andASP problems. These omplete
methods are usually based on the Davis-Putnam-Loveland-Logemann
algorithm [10,[9. The algorithm assumes that the Boolean for-mula
to be solved is expressed in onjun tive normal form, or CNF
(Denition 9).The DPLL algorithm may be des ribed as a re ursive pro
edure, as in Table 3.1.The pro edure has three subroutines: BCP,
Redu e, and Heuristi . The BCP routineperforms Boolean Constraint
Propagation, also known as Unit Propagation. It he kswhether any of
the lauses in the formula are unit lauses. A unit lause is one whi
h onsists of only a single literal. If su h a lause exists, then
the BCP routine adds theliteral to the urrent partial assignment
and simplies the formula. This inferen erule is known as the unit
lause rule or the unit literal rule. BCP repeatedly appliesthe unit
lause rule until either a on i t with the partial assignment is
dete ted, oruntil no unit lauses remain in the formula.The Redu e
subroutine is used by both the DPLL pro edure and the BCP pro
e-dure to simplify a CNF formula by a single new assignment.It is
assumed in the pseudo ode of Table 3.1 that the negation of a
negative literalis a positive literal. For instan e, if literal =
:a, then :literal = a.The remaining subroutine used by DPLL is
Heuristi . The all Heuristi ('0)sele ts an atom a appearing in '0
and returns either the positive or the negativeliteral mentioning
a. This orresponds to the algorithm making a guess as to
whether38
DPLL(', I)// ' is a Boolean CNF formula; I a partial
interpretation.// Pre ondition: Atoms(') \Atoms(I) = ;.// This
routine sear hes for an assignment whi h extends I and satises './/
If su h an assignment is found, it outputs the assignment and
returns true.// Otherwise, it returns false.f ('0; I 0; onfli t)
BCP('; I)if ( onfli t = true)return falseif ('0 ontains no
lauses)output I 0 // I 0 is a satisfying assignmentreturn
trueliteral Heuristi ('0)if (DPLL(Redu e('0; literal); I 0 [
fliteralg) = true)return trueelse return DPLL(Redu e('0; :literal);
I 0 [ f:literalg)gBCP(', I)// Boolean Constraint Propagation//
Applies the unit lause inferen e rule to '// until a on i t is
found or until no unit lauses remain.// Returns the resulting ' and
I, as well as a ag// indi ating whether a on i t was found.f while
(9 a unit lause C = fliteralg in ') doif :literal 2 Ireturn ('; I;
true)I I [ fliteralg' Redu e('; literal)return ('; I; false)gRedu
e(', literal)// Returns ' simplied by the assumption that literal =
true.f Remove from ' all lauses ontaining literal.Remove :literal
from any remaining lauses in whi h it o urs.Return the resulting
'.g Table 3.1: Davis-Putnam-Loveland-Logemann algorithm for
SAT39
a will be true or false in the satisfying assignment. We refer to a
as a hoi e atom,and the assignment whi h is made to a as a hoi e
assignment. DPLL then makesa re ursive all to itself with a
instantiated a ording to the hoi e assignment. Ifthat re ursive all
fails, then DPLL ba ktra ks and makes another re ursive all,
thistime with the value of a reversed. The eÆ ien y of the DPLL
algorithm depends toa signi ant extent on the hoi es made by the
heuristi routine, and onsiderableresear h has gone into developing
ee tive heuristi strategies for DPLL.The exe ution of the DPLL
algorithm may be portrayed as a binary tree whereea h node in the
tree represents a re ursive all to DPLL, and ea h leaf node
representseither a on i t or a satisfying assignment.3.2 SmodelsThe
Smodels algorithm follows the general outline of the DPLL pro
edure. How-ever, rather than representing its problem instan e as a
set of Boolean lauses, Smod-els uses the representation whi h it re
eives from the grounding program Lparse.Smodels a epts a
grounded10, extended logi program. (We will assume for the mo-ment
that the program in ludes no minimize statements, but will address
minimizestatements in Se tion 3.2.5). Re all that Lparse translates
extended logi programsinto a set of normal rules, hoi e rules,
ardinality rules, and weight rules. The oun-terpart to the BCP pro
edure in the DPLL routine is the Expand routine in Smodels.Pseudo
ode for the Smodels algorithm is given in Table 3.2.10i.e.
propositional 40
Smodels(P , I)// P is an extended logi program.// I is a set of
literals representing a partial interpretation.// This routine sear
hes for a total interpretation whi h extends I to an answer set for
P .// If su h an interpretation is found, Smodels outputs it and
returns true.// Otherwise, it returns false.f J Expand(P; I)if (Con
i t(J))return falseif (J overs Atoms(P ))output J+ // J+ is an
answer setreturn trueliteral; for ed Heuristi (P; J)if (Smodels(P;
J [ fliteralg) = true)return trueif (for ed)return falsereturn
Smodels(P; J [ f:literalg)gExpand(P , I)// P is an extended logi
program.// I is a set of literals representing a partial
interpretation.// This routine derives inferen es whi h are true
in// any answer set of P extending I,// and adds the inferred
literals to I.// Returns the resulting ' and I, as well as a ag//
indi ating whether a on i t was found.f repeatI 0 II AtLeast(P; I)I
I [ fnot x jx 2 Unfounded(P;A)guntil I = I 0 or Confli t(I)return
IgCon i t(I)f return I+ [ I 6= ;g Table 3.2: Smodels
algorithm41
The two main subroutines of Expand are the AtLeast and Unfounded11
routines,both of whi h are used to obtain inferen es whi h will
extend the urrent truth as-signment. In Se tion 3.2.1 we des ribe
how these fun tions operate on normal logi programs. Then, in Se
tion 3.2.2 we look at how they apply to extended logi
pro-grams.3.2.1 Smodels' Inferen e Rules for Normal ProgramsRe all
from Denition 4 that a normal rule is one of the formh a1; : : : ;
ak; not b1; : : : ; not bmand that a normal logi program is a olle
tion of normal rules.AtLeast(P,I)AtLeast uses inferen e rules whi h
are valid under both the ompletion semanti sand the answer set
semanti s. We summarize the four inferen e rules used by
AtLeastbelow:Modus Ponens: If all of the subgoals in a rulea b1; :
: : ; bk; not 1; : : : ; not mare true in the urrent truth
assignment, infer a. For example, suppose that theprogram ontains
the rule w x; y; not z and that the urrent truth assignmentin ludes
x; y and :z. Then infer w.11In the Smodels sour e ode, and in
papers su h as [53 and [54, the routine whi h omputesunfounded sets
is alled the AtMost pro edure. 42
All Rules Can elled If every rule with head a has its body an elled
by the urrenttruth assignment,12 infer :a. For example, suppose
that the only rules with w intheir head are w x; not yw not x; not
zand that the urrent truth assignment ontains :x and z. Then infer
:w.Ba k hain True: If atom a is true in the urrent truth
assignment, and if everyrule with head a ex ept one has at least
one subgoal that is false in the urrent truthassignment, infer all
the subgoals of that remaining rule to be true. For example,suppose
the only rules with a in their head area b; ; not da e; fa not g;
hand that the urrent truth assignment ontains a; d;:e. Then infer
:g; h.Ba k hain False: If an atom a is false in the urrent truth
assignment and somerule a b1; : : : ; bk; not 1; : : : ; not mhas
every subgoal ex ept one true in the urrent truth assignment, infer
the remainingsubgoal to be false. For example, suppose the rule is
a b; ; not d and that :a; b; are in the truth assignment. Then
infer d.The all AtLeast(P; I) takes the logi program P and urrent
truth assignmentI, and applies the above four inferen e rules until
no further inferen es an be made,12A normal rule: h a1; : : : ; ak;
not b1; : : : ; not bm has its body an elled by I i :ai 2 I forsome
1 i k or bi 2 I for some 1 i m 43
or until a on i t is rea hed13, whi hever omes rst. The resulting
truth assignmentis returned as the result of the
all.Unfounded(P,I)Given a logi program P and a partial truth
assignment I, it is immediate fromthe denition of an unfounded set
(Denition 12) that the union of a olle tion ofunfounded sets is
itself unfounded. Thus, the greatest unfounded set [20, GUS(P;
I),with respe t to P and I is the union of all of the sets whi h
are unfounded withrespe t to P and I. The all Unfounded(P; I)
returns the set GUS(P,I).A basi subroutine used by the Unfounded
pro edure is the MinimumModelalgorithm for omputing the minimum
model of a Horn program (Se tion 2.2). Re allthat Dowling and
Gallier presented a version of this algorithm whi h runs in
lineartime in the size of the Horn program.One algorithm whi h ould
be used to ompute GUS(P,I) is the following:1. Let P 0 be the set
of rules in P minus all rules whi h have their body an elledby I.2.
Let P 00 be the set of rules in P 0 but with all negative subgoals
removed from allof the rule bodies. (Hen e, P 00 is a Horn
program.)3. Return GUS(P; I) = Atoms(P ) nMinimumModel(P
00).However, the pre eding algorithm is not as eÆ ient as one would
like for use inSmodels: the routine re omputes MinimumModel(P 00)
from s rat h every time thatthe Unfounded routine is alled. The
Unfounded routine an be alled multiple timesfrom Expand ea h time
that Expand is alled by the Smodels algorithm.13i.e., for some atom
x, both x and :x are in the truth assignment44
Note that the GUS operator is monotoni in the sense that, if I I 0,
thenGUS(P; I) GUS(P; I 0). So if GUS(P; I) has already been
omputed, and the setI n I 0 is not very large, one might hope to lo
alize the omputation of GUS(P; I 0) nGUS(P; I) to a relatively
small fra tion of the rules in P . Smodels a omplishes thisthrough
an optimization whi h uses sour e pointers.For ea h atom a 2
Atoms(P ), a sour e pointer a:sour e is maintained whi hpoints to
the rst rule whi h aused a to be ex luded from GUS(P; I). During
theexe ution of the AtLeast routine, if it is dete ted that a ruleR
= a Bodyhas its body an elled by a new guessed or inferred
assignment, and a:sour e = R,then a is entered into a set U .Then
the all Unfounded(P; I) works as follows:1. Close set U under the
following operator: If atom h =2 U and the rule pointedto by h:sour
e has a positive subgoal b 2 U then U U [ fhg.2. Remove elements
from U as follows: If a 2 U and ruleR = a Bodyis su h that I does
not an el R's body and PosSubgoals(R) \ U = ;, thenU U n fag.
(Also, set a:sour e = R.)3. Return GUS(P; I) = U .Step 2 of the
above algorithm essentially loses the set U using the
Dowling-Gallieralgorithm on P I. 45
3.2.2 Smodels' Inferen e Rules for Extended ProgramsAs mentioned
earlier, Lparse translates any extended logi program into a set
ofnormal rules, hoi e rules, ardinality rules, and weight rules.
For ea h of these ruletypes, Smodels implements the Modus Ponens,
All Rules Can elled, Ba k hain True,and Ba k hain False inferen e
rules, as well as negation based on unfounded sets.In the pre eding
se tion, we explained how these inferen e rules are implementedfor
normal logi programming rules. In this se tion, we will explain how
they areimplemented for the hoi e, ardinality, and weight
rules.Choi e RulesRe all from Se tion 2.4 that a hoi e rule is a
rule of the formfh1; : : : ; hkg a1; : : : ; an; not b1; : : : ;
not bm:Su h a rule is equivalent to having k rules of the formfhig
a1; : : : ; an; not b1; : : : ; not bm (3.1)where 1 i k. The Ba k
hain True, All Rules Can elled, and Unfounded Setinferen e rules
treat a rule of the form 3.1 exa tly as though it were a normal
rulewith hi at the head. The Modus Ponens and Ba k hain False
inferen e rules, however,do not apply to hoi e rules.Cardinality
RulesA ardinality rule is one of the formh k fa1; : : : ; an; not
b1; : : : ; bmg: (3.2)46
With respe t to implementing the Smodels inferen e rules, the main
dieren es be-tween a ardinality rule and a normal rule are the
onditions under whi h the ruleres (i.e., when Modus Ponens applies)
and the onditions under whi h the rule is an elled. A normal rule h
a1; : : : ; an; not b1; : : : ; not bmres when n + m of its
subgoals are satised, and is an elled when any one of itssubgoals
is ontradi ted. A rule of form 3.2 res when any k of its subgoals
aresatised, and is an elled when any n +m k + 1 of its subgoals are
ontradi ted.The threshold for ring ae ts when Modus Ponens and Ba k
hain False areapplied to the rule. For instan e, suppose that h has
been set to false and k 1 ofthe subgoals in the rule body have been
satised. Then the Ba k hain False inferen erule is applied to
ensure that the remaining subgoals of the rule are ontradi ted.The
threshold for rule an ellation ae ts the appli ation of the All
Rules Can- elled and Ba k hain True. For instan e, if the head atom
h from rule 3.2 has beenset to true, all other rules with h in
their head have been an elled, and n+m k ofthe subgoals of this
rule have been ontradi ted, then the remaining k subgoals maybe
inferred true.Both thresholds are involved in implementing the
inferen e rule for unfounded sets.The reason for this is evident
from the algorithm given for the Unfounded pro edureoutlined in Se
tion 3.2.1. The rst phase of the pro edure adds elements to the
setU when supporting rules are (in a sense) \ an elled". Then the
se ond phase of thepro edure removes elements from U when new
supporting rules are found through arule-ring pro ess. 47
Weight RulesRe all that a weight rule is a rule of the formh l fa1
= wa1 ; : : : ; an = wan ; not b1 = wb1 ; : : : ; not bm = wbmg:
(3.3)As with ardinality rules, a weight rule has two important
thresholds: the ringthreshold, l, and the an elling threshold w =
Pni=1 wbi +Pmi=1 w i l. The rule is an elled only if the sum of the
an elled subgoals is greater than w.The main dieren e in
implementing weight rules, as opposed to ardinality rules, omes
from fa t that the weights mentioned in the body of the rule may
dier fromea h other. This presents no extra ompli ation regarding
the Modus Ponens, AllRules Can elled, and Unfounded Set inferen e
rules, but does somewhat ompli atethe implementation of the two ba
k haining inferen e rules.First, we will dis uss how Smodels' Ba k
hain True inferen e works for weightrules. Suppose that rule R is
of the form shown in 3.3. Suppose that d is the ombined weight of
the an elled subgoals in the body of R. Suppose also that x isan
uninstantiated subgoal of maximal weight from the body of R. Then
the Ba k hainTrue inferen e rule an be applied to R to infer that x
is true if and only if (1) theatom h is true, (2) all of the rules
other than R whi h have h in their heads havebeen an elled, (3) d
w, and (4) d + wx > w (where w is the an elling thresholddened
above).On e subgoal x has been inferred true by ba k haining,
Smodels he ks whetherthere are anymore uninstantiated subgoals in
the body of R. If so, then x is resetto refer to the uninstantiated
subgoal of maximal weight, as before. If we againhave d + wx > w
then the new x is also inferred to be true by the Ba k hain
True48
inferen e rule. The rule is repeatedly applied to R until there is
no subgoal x su hthat d+ wx > w.Next, we onsider how Smodels
applies the Ba k hain False inferen e rule to ruleR. Suppose that s
is the ombined weight of the satised subgoals in the body of
R.Suppose that x is an uninstantiated subgoal of maximal weight
from the body of R.The Ba k hain False inferen e rule an be applied
to R to infer that x is false if andonly if (1) h is false, (2) s
< l, (3) s+ wx l.As with the Ba k hain True inferen e rule, the
Ba k hain False inferen e rulefor weight rules may make several
inferen es by iterating through the uninstantiatedsubgoals in the
body of the rule. The iteration goes through the subgoals in de
reasingorder of their weights and sets ea h subgoal to false until
there is no uninstantiatedsubgoal x remaining in the rule su h that
s+ wx l.3.2.3 Lookahead-Based Heuristi Smodels' heuristi routine pi
ks the hoi e atom a, whi h will be the next atominstantiated in the
urrent truth assignment. It returns a if Smodels is to rst
in-stantiate a to true, and returns :a if the initial value of a is
to be false.Perhaps the biggest drawba k of Smodels' heuristi
routine is that it is often ratherexpensive to ompute. A signi ant
advantage of the routine is that it sometimesprovides new for ed
inferen es, rather than just guessed inferen es.The heuristi
attempts to hoose a in su h a way that instantiating a will yielda
large number of inferen es. Suppose that I is the urrent truth
assignment beingapplied to logi program P . Then, for ea h
uninstantiated atom a 2 Atoms(P ) denePosS ore(a) = jExpand(P; I [
fag)j49
NegS ore(a) = jExpand(P; I [ f:ag)j:Smodels' heuristi returns the
atom a su h that min(PosS ore(a); NegS ore(a))is maximized. Ties
are broken by hoosing a su h thatmax(PosS ore(a); NegS ore(a))is
maximized. Ties whi h still remain are then broken randomly. The
pro ess of all-ing the Expand routine on I [ fag and I [ f:ag is
alled a lookahead.Calling the Expand routine on every
uninstantiated atom at every hoi e pointin the sear h may be very
expensive. To partially alleviate this expense, Smodelsdoes not
perform a lookahead on an atom b if, during the exe ution of the
same allto the heuristi , a lookahead was performed on some atoms a
su h that b or :b wasan element of Expand(P; I [ a) or Expand(P; I
[ :a). The reason for omitting thelookahead for b in this ase is
that if, for example, b 2 Expand(P; I [ fag), then it isguaranteed
that Expand(P; I [ fbg) Expand(P; I [ fag):Therefore, one may
regard it as somewhat likely (though not ertain) that a will s
orebetter than b on Smodels' heuristi .On e the atom a with the
best heuristi s ore has been sele ted, then a is returnedas the hoi
e literal if PosS ore(a) > NegS ore(a). Otherwise, :a is
returned.Obtaining for ed inferen es from lookaheadsIf, for some
literal x, Expand(P; I [ fxg) is found to ontain a on i t (i.e.,
botha and :a for some atom a), it is valid to infer that x is false
in any answer set whi hextends I. In su h a situation the heuristi
routine an immediately return :x asa for ed inferen e. Obtaining
these for ed inferen es is potentially a very valuablebenet whi h
is earned from the (potentially quite expensive) lookahead pro
ess.50
Pseudo ode for Smodels' heuristi routine in given in Table 3.33.2.4
Computing Multiple Answer SetsThe default behavior of Smodels is
that it seeks to nd and display a single answerset for the given
logi program. However, a ommand-line option exists whi h allowsthe
user to request that all answer sets for a given logi program be
omputed anddisplayed. The user an also request that Smodels ompute
and display up to nanswer sets for the program, where n is a
user-spe ied, positive integer.Suppose the user has requested that
Smodels ompute multiple answer sets. Then,whenever Smodels omputes
a new answer set, it displays the answer set and he kswhether the
desired number of answer sets has been met. If not, then it ba ktra
ksfrom the most re ent assignment, and ontinues its sear h.3.2.5
Implementing Minimize StatementsIn the ase where the program P
ontains minimize statements, then Smodelsmust, at least impli itly,
iterate through all of the answer sets of P and ompare theirs ores
relative to those statements. After all answer sets have been
enumerated, theone with the best s ore is returned as the
solution.An optimization to this s heme whi h Smodels uses is to
modify the Con i troutine so that it ompares the s ore of the
urrent partial truth assignment to thes ore of the best answer set
found so far. (The s ore of a partial truth assignmentis the total
weight of the subgoals satised by the assignment. Thus it provides
alower bound on the s ore whi h an be a hieved by any assignment
whi h extends the urrent assignment.) If the s ore of the urrent
partial assignment is already worse51
Heuristi (P , I)// Returns the next literal whi h is to be set to
true// by the sear h routine.// Also, returns a Boolean value whi h
indi ates whether the literal// represents a for ed inferen e.f
Avail Atoms(P ) n Atoms(I)bestMin bestMax 0for a 2 AvailI 0
Expand(P; I [ fag)if Confli t(I 0)return :a, trueAvail Avail n
Atoms(I 0)posS ore jI 0jI 0 Expand(P; I [ f:ag)if Confli t(I
0)return a, trueAvail Avail n Atoms(I 0)negS ore jI 0jmin min(posS
ore; negS ore)max max(posS ore; negS ore)if (min > bestMin) or
(min = bestMin and max > bestMax)bestMin minbestMax maxbestAtom
abestPolarity (posS ore > negS ore)if (bestPolarity)return
bestAtom, falseelse return :bestAtom, falseg Table 3.3: Smodels'
lookahead-based heuristi 52
(i.e. higher) than the s ore of the best known answer set, then Con
i t returns true,indi ating that there is no purpose in extending
this assignment.
53
CHAPTER 4CONFLICT CLAUSES FOR SAT AND ASP In this hapter we will
dis uss how SAT solvers generate on i t lauses and howthey use
these lauses to improve sear h eÆ ien y. In parallel, we will dis
uss how wehave adapted these te hniques into our Answer Set
Programming solver, Smodels (\Smodels with on i t lauses").The
algorithmi te hniques whi h are original to this dissertation are
dis ussed inSe tions 4.3.2-4.3.4 and 4.4.2, where we explain how
Smodels diagnoses the auseof a on i t in an answer set sear h. (See
also Appendi es C and D, where we proofthat the resulting Smodels
sear h algorithm is orre t and omplete.)4.1 Overview of Con i t
ClausesA on i t lause is a ba ktra king solver's diagnosis of why a
on i t o urred.The solver an use this diagnosis to prune the sear h
spa e and to dire t the sear hheuristi .14 Any solver whi h is
based upon the Davis-Putnam-Loveland-Logemannalgorithm an in prin
iple utilize on i t lauses. This observation, ombined withthe su
ess of on i t lause learning in improving the eÆ ien y of
DPLL-based SAT14Con i t lauses are sometimes referred to as
\lemmas" be ause they are intermediate resultswhi h may be reused
by the solver as it develops a solution to the original
problem.54
solvers on industrial appli ations, was our motivation for adapting
on i t lauses toASP sear h.In this se tion, we will motivate the
general idea of on i t lause learning by anabstra t example of
DPLL-based sear h. This example will be equally appli able toSAT
sear h or to ASP sear h.Let us suppose that we have a DPLL-based
solver whi h is sear hing for thesolution to a problem. Suppose
further that, before rea hing the rst on i t in itssear h, the
solver has sele ted atoms a1; a2; : : : ; a100, in this order, as
its hoi e atoms,and that it has initially instantiated ea h of
these atoms to the value true. Assumealso that immediately after
instantiating a100 to true, it rea hes a on i t in the sear h(i.e.,
these 100 assumptions have aused the sear h engine to dedu e that
some otheratom x is both true and false). This situation is
portrayed in Figure 4.1.After rea hing this on i t, the basi DPLL
algorithm would ba ktra k the as-signment of a100 = true, set a100
= false, and ontinue the sear h. (See Figure 4.2.)However, if our
algorithm in orporates on i t lauses, it would pause
immediatelyafter the on i t is dete ted in Figure 4.1 in order to
to analyze the \ ause" of the on i t. In solvers using the same on
i t lause strategy as Cha and Smodels ,the diagnosis returned will
identify a subset of the assignments made that would, inthe ontext
of the problem at hand, have been suÆ ient to result in the on i t
thatis being analyzed.For instan e, suppose in our example that the
on i t analysis routine returns adiagnosis whi h states that the
assignments a2 = true, a3 = true, and a100 = true,taken together,
were suÆ ient to ause the on i t in Figure 4.1. (In Se tions
4.3through 4.5, we will explain how this diagnosis is obtained.)
From this diagnosis,55
a1
a2
a3
a4
a99
a100
Conflict
true
true
true
true
true
true
Figure 4.1: Rea hing the rst on i t in a DPLL-based sear h
56
a1
a2
a3
a4
a99
a100
true
true
true
true
true
true false
continue searchFigure 4.2: Ba ktra king from the rst on i t
57
we may infer that no solution of the problem at hand an set a2, a3,
and a100 si-multaneously to true. This results in our solver
inferring the lassi al logi lause::a2 _ :a3 _ :a100.On e this on i
t lause has been omputed, it may be used by the solver in threeways
to improve the sear h eÆ ien y: (i) to dire t ba kjumping, (ii) to
serve as anadded onstraint, and (iii) to guide the sear h heuristi
.Ba kjumping, also known in the SAT literature as \non hronologi al
ba ktra k-ing" [43, potentially allows the solver to remove several
levels of assumptions fromthe sear h when ba ktra king from a
single on i t. As we saw in Figure 4.2, thebasi DPLL algorithm (whi
h uses \ hronologi al ba ktra king") removes only theassumption
a100 = true from its sta k, and sets a100 = false at the 99-th
level ofthe sear h. (We dene the sear h level of an inferen e to be
the number of hoi eassignments whi h were in ee t when the inferen
e was made.) In ontrast, a solverutilizing the on i t
lause/diagnosis :a2 _ :a3 _ :a100 an ba kjump past the as-sumptions
of a99 = true, : : :, a4 = true sin e none of these assumptions
were requiredin order to produ e the on i t. The solver then
assigns a100 = false at level 3 of thesear h, as shown in Figure
4.3. (In the gure, the assignment a100 = false does notappear in a
bubble be ause it is a for ed assignment in this ir umstan e.)The
se ond use of a on i t lause is to serve as an added (\learned")
onstraint.In our example, immediately after ba kjumping, the solver
would store the lause:a2 _ :a3 _ :a100 for later referen e.
Suppose, then, that later in the sear h the urrent partial
assignment in ludes a2 = true and a100 = true. Then, based onthe
stored on i t lause, the solver ould immediately infer that a3 =
false, therebyfurther pruning the sear h spa e. Moskewi z et al.
[46 provide the following intuition58
a1
a2
a3
true
true
true a100 = false
continue searchFigure 4.3: Situation after ba kjumping based on :a2
_ :a3 _ :a100for using on i t lauses in this way: If we interpret
rea hing a on i t in the sear has the solver making a \mistake",
then a on i t lause an be seen as the solver'sattempt to diagnose
the ause of the mistake, and to learn from it so that futureinstan
es of the same mistake are not repeated.The third use of on i t
lauses is to guide the sear h heuristi . Part of the roleof the
sear h heuristi in the DPLL algorithm i