Embed Size (px)
Citation preview

Copyright 0 1991 by the Genetics Society of America
LEWONTIN and KOJIMA Meet FISHER: Linkage in a Symmetric Model of Sex Determination
Marcus W. Feldman,* Freddy B. Christiansent and Sarah P. Otto*
*Defartment of Biological Sciences, Stanford University, Stanford, Calijornia 94305, and tDefartment of Ecology and Genetics, University of Aarhus, DK-8000 Aarhus C, Denmark
Manuscript received February 13, 199 1 Accepted for publication May 30, 1991
ABSTRACT The effect of linkage and epistasis on the evolution of the sex-ratio is studied in a symmetric two-
locus model of autosomal sex determination closely related to the symmetric viability model of R. C. Lewontin and K. Kojima. R. A. Fisher’s expectation of an even sex ratio for autosomal sex determi- nation by a single gene governs the dynamics when the loci are tightly linked. However, recombination may preclude optimization of the sex ratio just as occurs in viability selection models. Many of the evolutionary phenomena known for the symmetric viability model also occur here. In addition, we exhibit a series of new phenomena related to the presence of surfaces of even sex ratio.
T HE evolutionary significance of the even sex ratio has interested population geneticists and ecolo-
gists since FISHER’S (1930) famous argument for an even sex ratio. He considered the number of future offspring of individuals in a population (at time t ) that on the average produce more male than female off- spring. The offspring population (generation t + 1) will therefore contain more males than females, and when these individuals reproduce, a female will on average contribute to more offspring (generation t + 2) than will a male, because each offspring has one mother and one father. With this scenario FISHER reasoned that if variation exists among individuals in the original population (generation t ) , then those orig- inal individuals that produce a higher than average fraction of female offspring would produce more grand offspring (generation t + 2). In this way the mechanism (presumably genetic) that controlled sex determination will evolve to move the population closer to the even sex ratio.
Subsequent quantitative analyses of models of sex determination have generally confirmed FISHER’S speculation. When sex is determined by a single au- tosomal locus, a population’s sex ratio is expected to evolve towards evenness. This is true irrespective of whether the analysis is made by optimality reasoning [see e.g., extensive reviews by CHARNOV (1982) and BULL (1 983)] or by formal population genetic analysis (BODMER and EDWARDS, 1960; NUR 1974; ESHEL 1975; UYENOYAMA and BENGTSSON 1979; ESHEL and FELDMAN 1982a; see’ also chapters 3 and 4 of KARLIN and LESSARD, 1986). In models of sex determination which involve consanguinity, sex-linkage or haplodi- ploidy, sex ratios different from even may be ap-
Genetics 1 2 9 297-312 (September, 1991)
proached (HAMILTON 1967; CHARNOV 1978; UYEN- OYAMA and BENGTSSON 198 1 ; BULL 198 1 ; ESHEL and FELDMAN 1982b; see also KARLIN and LESSARD 1986).
When sex is determined by more than one autoso- mal locus, epistasis and recombination might be ex- pected to interfere with the evolution of the popula- tion towards an even sex ratio. The evolution of the sex ratio can be represented in terms of a viability selection model where the fitnesses of males and fe- males of a given genotype are the frequency of males and females within that genotype, i .e. , the male fitness is m and the female fitness is 1 - m, where m is the frequency of males within the genotype. Thus, a pop- ulation genetic model for the evolution of sex is a special case of the two-sex viability selection model, and we may employ the same tools for the study of the effect of linkage and recombination as was used in the study of these effects in one-sex viability selec- tion models.
Gne of the first and most successful models of two- locus viability selection is the symmetric viability model of LEWONTIN and KOJIMA (1960). They as- sumed that the fitness assigned to a genotype is de- pendent only on the loci at which it is heterozygous. This assumption introduced sufficient simplification to allow a fairly complete picture of the dynamics of the model yet still address a variety of biological phenomena (LEWONTIN and KOJIMA 1960; B ~ D M E R and FELSENSTEIN 1967; EWENS 1968; KARLIN and FELDMAN 1970). The analyses of this and other two- locus or multilocus models are aided by the fact that the dynamics for tight linkage are well predicted by the dynamics of the model for absolute linkage, which in turn are equivalent to those of a one locus multi- allele model.
In single-locus multiallele autosomal models of sex

298 M. W. Feldman, F. B. Christiansen and S. P. Otto
determination, the equilibrium configurations can be of two types (ESHEL and FELDMAN 1982a). In one the allele frequencies in males and females are equal and take the value characteristic of a one-locus multiallele viability model for which the probabilities of being male, for example, represent the viabilities. Such equi- libria are commonly called sex-symmetric. In the other equilibrium configuration, the sex ratio is even. With two alleles there may be two isolated equilibria of this type (ESHEL 1975) and these equilibria are always locally stable. With more than two alleles, KARLIN and LESSARD (1983, 1984; see also 1986, Chapter 3) showed that with r > 2 alleles a surface of dimension r - 2 of equilibria with the even sex ratio may exist. They also showed that a stable sex-sym- metric polymorphism (i.e., sex-symmetric in allele fre- quencies) with, say, k alleles present cannot coexist with an equilibrium with even sex ratio involving these k alleles. For two alleles this means that the sex- symmetric equilibria may only be stable when the even sex-ratio equilibria do not exist.
The evolutionary literature on sex determination by two or more loci is sparse. PAMILO (1 982) made a numerical study of haplodiploid sex determination with four and five loci in which control of the sex ratio was implemented according to a variety of be- havioral mechanisms believed to be characteristic of eusocial hymenoptera. With queen control, for ex- ample, he saw convergence to the even sex ratio while with worker control the sex ratio tended to be biased towards females. MAFFI andJAYAKAR (1 98 1) proposed a two locus model for sex determination in Aedes aegypti. One locus determined sex according to a diallelic system with Mm male and mm female. A second linked locus modified the segregation proba- bilities for Mm thereby acting effectively as a segre- gation distorter. Detailed analyses of this model by LESSARD (1987) and FELDMAN and OTTO (1989) re- vealed a surprising range of possible dynamics, includ- ing cycling and convergence to different polymorphic equilibria according to the frequency of recombina- tion between the two genes. There appear to be few other evolutionary case studies of sex determination by two or more loci.
LIBERMAN et al. (1 990) address long term evolution of the population sex ratio in multilocus models, gen- eralizing the approach of ESHEL and FELDMAN (1 982a) (see also LESSARD, 1989 for analysis of a comparable two-sex viability model). Here the population is as- sumed to be at equilibrium with a sex ratio different from even when a mutant allele appears at one of the loci. This new allele will increase when rare if it brings the population’s sex ratio closer to even. If, however, a new chromosome appears at such an equilibrium state it may increase even if it causes the sex ratio to depart further from even than was the case prior to its
appearance (LIBERMAN et al. 1990). The conditions that determine the fate of such a new chromosome exhibit complicated interaction between the recom- bination fraction and the parameters of sex determi- nation.
KARLIN and LESSARD (1986, Ch. 5) applied the results of KARLIN and LIBERMAN (1 979a,b,c) and KAR- LIN and AVNI (1 98 1) on nonepistatic selection systems to multilocus autosomal models of sex determination. Their focus was on the equilibrium configurations and their stability. In these models, the genes which determine the probability that an individual is male interact multiplicatively or additively (or some com- bination of these) or in such a way that this probability depends only on the number and/or position of het- erozygous loci. KARLIN and LESSARD obtained condi- tions under which the multilocus linkage-equilibrium point is stable. They show that this equilibrium is stable for sufficiently loose linkage, as in classical one- sex viability models.
This paper is devoted to an analytical and numerical study of the dynamics of sex-ratio evolution as a function of recombination in the simple symmetric two-locus case where the probabilities that a zygote develops into a male have the same properties as the viabilities in the classical two-locus viability model of LEWONTIN and KOJIMA (1 960). Thus these probabili- ties depend only on the loci at which the zygote is heterozygous. We obtain equilibria that depend on the recombination fraction and study the relationship between these, the linkage-equilibrium point, and the situation where the sex ratio is even. Many of the intricacies that arise in the classical theory of linkage and selection are shown to have analogs in the sym- metric sex determination system. In addition, there is the added complication of surfaces of even sex ratio which may be attracting even when stable isolated equilibria exist. We also show that in the simplest symmetric and overdominant multiplicative model, stability of the central equilibrium requires more than just an inequality expressing that linkage is sufficiently loose. In fact, there is a rather delicate tradeoff be- tween the “effective” selection on males and females that must also be met before this equilibrium is stable. Coexistence of different classes of stable polymorphic and fixation states is also demonstrated as well as the analog to the classical “Ewens gap” (EWENS 1968). In fact, two different versions of a gap exist. The first is like that of the selection model where monomorphic equilibria displace polymorphic equilibria for an in- terval of recombination frequencies. The second type of gap is produced by the existence of attracting points with an even sex ratio, in which case locally stable equilibria with an uneven sex ratio may yield to even sex-ratio equilibria for an interval of recombination frequencies.

Linkage in a Model of Sex Determination 299
Some preliminary remarks on the Lewontin- Kojima model.
Consider two loci with alleles A and a at the first and B and b at the second. The frequencies of the four chromosomes AB, Ab, aB and ab are denoted by ul, up, u3 and u4, and, at equilibrium by 61, 6 2 , 43,224.
The viabilities of the ten genotypes in LEWONTIN and KOJIMA’S (1960) model are represented in a matrix that shows the parental gametes of the individuals:
AB Ab aB ab A B a b c d A b b a d c a B c d a b a b d c b a
BODMER and FELSENSTEIN (1967) and KARLIN and FELDMAN (1970) normalize to the double heterozy- gote and use the notation a = 1 - 6, b = 1 - 7 , c = 1 - 8, d = 1. If viability depends only on the number of heterozygous loci (and not on their position) then b = c. The frequency of recombination between the loci is R, and reproduction occurs by random mating.
LEWONTIN and KOJIMA (1960) claimed that there are three equilibria of this model. These have the property 4, = Zi, = 1/4 f 6, z i p = 2i3 = 1/4 7 6 with either D = 0 or
6 = t l i i 4 - ii22i3 (1)
= f % [ l - 4Rd/(a + d - b - c ) ] ” ~ .
6 is +‘le equilibrium value of the linkage disequili- briL The equilibria given by (1) are valid for
R < 118 (2)
where 1 = 2(a + d - b - c ) / d . The equilibrium with 6 = 0,
t l = z i p = .lis = 2i4 = Y 4 , (3)
commonly called the central point may be stable for R > 1/8. The first complete stability analysis of these equilibria can be found in Ewens (1968). For R suffi- ciently small there is always a locally stable equilibrium of the form 2il = 2i4,2i2 = ti3. For R > 118 and d - a > 16 - c I the central point (3) is locally stable. When d > a, b, c and 1 > 0 it is usually the case that equilibria (1) are stable for R < 1/8. EWENS (1968), however, showed that when the central point is stable for R > 4% these points may be unstable for R in an interval (I? d) [ O , 1/81. We call ( I? I?) the “Ewens gap” and an alternative derivation of the values I? and d is given by KARLIN and FELDMAN (1 970). The gap exists
when the quadratic in R,
(b + c - 2a)* - 16Rd(b - a)(c - a)/ l
= (2d - b - c - 4Rd)’ (4a)
has real roots in [0 , 1/81. When b = c this reduces to the inequality
d - b > (2 + &)(d - a) . (4b)
KARLIN and FELDMAN also discovered that up to four equilibria of the form Zil # 2i4, $2 # 2i3 may exist but cannot be stable if b = c. HASTINGS (1985) showed that all four may be stable if b # c for R less than and sufficiently close to 1 - a/d. When b = c < a and R > 1 - a/d, the four chromosomal fixation states 61 = 1, 2i2 = 1, t i 3 = 1, 6 4 = 1 are stable, and this may occur simultaneously with stability of the polymorphic equi- libria (1) or (3) (FELDMAN and LIBERMAN 1979).
Generalizations of the Lewontin-Kojima model to multiple loci were developed by KARLIN and AVNI (1981). For these a condition for stability of the cen- tral point is that the amount of recombination (see the original papers for the exact expression) is sufficiently large. As for the two locus model these conditions for the stability of the central point are related to the existence of a variety of equilibria like the equilibria given by (1) (CHRISTIANSEN 1988). In addition, CHRIS- TIANSEN (1 988) gives conditions for simultaneous sta- bility of central points with different numbers of pol- ymorphic loci and of the central point and fixation states. These conditions have been extended to the symmetric fertility model (CHRISTIANSEN 1989), which includes models of sex-ratio evolution.
The algebraic analysis of the Lewontin-Kojima model is simplified somewhat by the assumption b = c. In the following analysis of sex ratio evolution we make an analogous assumption in order to facilitate comparisons with the viability case, and we will refer to the results described above for symmetric viabili- ties.
Two-locus model of sex determination
Suppose that sex is determined by the genotype at two loci with alleles A and a at the first and B and b at the second. The chromosomes AB, Ab, aB, ab are labeled 1, 2, 3, 4, respectively, and the entries of the matrix M = 11 mq 11 represent the probabilities that zygotes of genotype (2, j ) develop into males, with my = mji. The probability that a zygote of genotype (i, j ) becomes female is then 1 - mQ. Thus the matrix U - M = 11 1 - mtj 11 describes the probabilities that zygotes become females, where U = 11 uij 11 with uq = 1 for all i and j . We assume throughout that there is no position effect; i.e., m14 = m25. After fertilization the frequencies of the zygotes are denoted by rii, for double homozygotes, and 22,., for all other genotypes.

300 M. W. Feldman, F. B. Christiansen and S. P. Otto
Following the determination of sex the proportions of the various genotypes are xii and 2xV among males and yii and 2yc among females with
x.. - m..z../M I1 - It It ,
2 x ~ = 2mVzV/M ( 5 )
yii = (1 - mi&/( 1 - M ) ,
2yij = 2( 1 - mV)zv/( 1 - M )
for i, j = 1, 2 , 3, 4 (i # j ) where M = E, X i myzV. Denote the frequencies of gametes made by these individuals when they mature by xi in males and yi in females. Then, after recombination at rate R we have
XI = XI, - RD,, x2 = ~ 2 , + RD,, j j
xs = x3j + RD,, x4 = x4, - RD, (sa) j j
and
JI = E Jlj - RDy, y2 = y2j + m y , i j
YS = C ysj + RDy, ~4 = y4j - RDy. (6b) i j
where 0, = x14 - x23 and Dy = y14 - y23 measure the linkage disequilibrium in males and females respec- tively. These gametes unite at random to produce zygotes whose frequencies are
Z; = (xiyj + ~ j y i ) / 2 (7) for i, j = 1, 2 , 3, 4, so that for all i, j
x!. = m..z!./M’, ‘I ‘I’I y,$ = (1 - mV)z&/(1 - M’) (8)
where, from (7) M’ = m..z!. ‘I = mvxiyj. (9)
i j i j
From (6a) and (6b) we may now compute the gamete frequencies xi’, y! produced by these individuals as adults as follows:
2M’x; = my(x ly j + x j y l ) - m14RDc (loa) j
2 M ‘ d = m 2 j ( ~ ~ y j + X j y 2 ) + m14RDc (lob) j
2M‘xI = msj(xsyj + xjy3) + m14RDc (1 Oc)
2M‘x; = m4j(x4yj + xjy4) - m14RDc (1 Od) j
i 2( 1 - M’)$ = XI + ~ l - R D c - 2 M ‘ ~ i (1 0 4
2( 1 - M’)$ = + 9 2 + RDc - ~ M ’ X ; (10f)
2( 1 - M’)$ = xs + ~3 + RDc - ~ M ’ X ; (1%)
2( 1 - M’)$ = x4 + y4 - RDG - 2M’x; (1 Oh)
where
Dc = 2 ( d 4 - zds) = xIy4 + yIx4 - xZy3 - x3Y2 (1Oi)
is the overall linkage disequilibrium among zygotes. From (1 0e)-( 1 Oh) at equilibrium we have
(1 - 2M)(i?1 - j l ) = R 6 c (1 la)
(1 - 2M)(i2 - j 2 ) = -R6c (1 1b)
(1 - 2M)(i?3 - j s ) = -REG (1 1 4
(1 - 2M)(& - j 4 ) = R&. (1 1 4
This implies (1 - 2M)( iF - $) = 0 and (1 - 2M) (@ - &) = 0, where $’ = i 1 + i 2 , iz = j l + j2, &’ = i1 + &, is = jl + j 3 are the respective equilibrium allele frequencies. Thus at equilibrium we have the two possibilities
M = ‘/2 or {i? =i; and i f= ii), ( 1 2 )
which generalizes the one locus result of ESHEL and FELDMAN (1 982a);
Result 1: At equilibrium either the sex ratio is even, or the allele frequencies in males and females are equal. This is independent of the recombination frac- tion.
Result 1 can be found in LIBERMAN et al. (1990) and can be generalized to an arbitrary number of loci. It follows that a sex-symmetric two locus equilibrium must be in linkage equilibrium. More generally we have
Result 2: If recombination ?ccurs, then at an equi- librium with even sex ratio (M = %) or with gamete frequencies equal in males and females (i?i = j , ) the population must be in linkage equilibrium.
We may write
so that at an equilibrium with M # Yi we have
R6G &/2 = kc - - = 6% + A (14) 2(1 - 2M) 2( 1 - 2M) ’ after substitution from (1 l), with
e--- G - X1X4 - .&&, 6& = j1j. l - j&. (15)
Thus, from (14) we derive equilibrium expressions

Linkage in a Model of Sex Determination 30 1
for the gametic disequilibrium in each sex separately:
.. 6,(1- 2 f i + R ) DE = A
2(1 - 2M) ’ 6 c ( l - 2 f i - R )
Dyc = A
2(1 - 2M) ’
(16)
which are functions of the linkage disequilibrium among zygotes and the deviation of the sex ratio from evenness. Thus, if there are fewer males than females (fi < V2) the magnitude of the linkage disequilibrium is greater in males than females, and vice versa. Finally from (1 4) it is obvious that
6, = d., + 6%. (17)
Equilibria other than those of the form described in Result 2 may exist and will be studied at length in what follows.
Boundary behavior The stability properties of equilibria with one or
both loci fixed for one allele may aid in understanding the equilibrium behavior of the situation with poly- morphism at both loci. Consider first the “corners” (by which we mean the chromosome fixation states) and take x1 = yl = 1 (where the population is fixed on AB). This fixation state is locally unstable if allele a increases in frequency when introduced at low fre- quency, i.e., when the gamete aB increases, and this occurs if
The fixation state is also locally unstable if allele 6 , i.e., gamete Ab, increases in frequency when intro- duced at low frequency, which occurs if
If either of these conditions is satisfied, then the population sex ratio moves closer to even (ESHEL and FELDMAN 1982a; LIBERMAN et al. 1990). Finally, the fixation state is locally unstable if the alternative alleles at both loci increase in frequency when rare due to the increase of gamete ab, and this occurs if
( 1 - R ) (% + 1 - m14 > 1 . (18c) 2m11 2(1 - mll)
Only this last condition involves the recombination fraction, and we write it more usefully as
< R* = (m14 - mll)(l - 2mll) . (18c’)
Notice that if R = 0, the one-locus multiple-allele result obtains, namely that for m l l > L/2 no invading
(mil + m14 - 2m11m14)
2
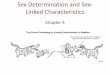
FIGURE 1 .--Stable equilibria on the edge where allele A is fixed in the symmetric model with m l l = m22. The regions where the corner equilibria are stable are marked “fixation” (condition 18a violated), those where the sex-symmetric equilibrium is stable are marked “p = $4’’ and the regions where the even sex-ratio equilibria exist and are stable are marked “M = ’h .” The even sex-ratio equilibria are separated by the sex-symmetric equilibrium which is unstable.
chromosome j for which ml, > m l l can succeed (and similarly for ml < G). LIBERMAN et al. (1 990) showed that invasion due to condition (18c) does not neces- sarily entail that the sex ratio moves closer to even.
Next consider a gene fixation edge where one locus is fixed, say the B / b locus is fixed on allele B, so initially x2 = x4 = y2 = y4 = 0. The equilibrium properties within this edge are covered by the one locus theory (ESHEL 1975; KARLIN and LESSARD 1986, Ch. 4, App. A), so either the sex ratio is even, M = V2,
or the equilibrium is sex-symmetric, il = j1 and is = j s . The possible stability arrangements are shown in Figure 1 . At the even sex ratio equilibrium the local analysis of stability against invasion of allele b (the external stability) is severely complicated by the exist- ence of unit eigenvalues of the stability matrix (see KARLIN and LESSARD 1986, Ch. 3). At the sex-sym- yetric equilibrium we define M2. = m21i1 + m23i3 and M4. = m 4 , i 1 + m4& which locally approximate the sex ratio among individuals carrying the rare gemetes Ab and aB, respectively. Now write
for i = 2, 4, and
K = - + - , m14 1 - m14
2M 2(1 - M)
Then the stability to invasion by allele b is determined by the eigenvalues of the matrix

302 M. W. Feldman, F. B. Christiansen and S. P. Otto
Analogously to BODMER and FEUENSTEIN (1 967) we note that if HZ < 1 and H4 < 1 then the equilibrium is stable, and if H z > 1 and H4 > 1 then the equilibrium is unstable. If H z < 1 and H4 > 1 (or H Z > 1 and H4 < 1) then the stability of the equilibrium depends on the recombination fraction. For instance, for H Z > 1 and H4 < 1 the equilibrium is locally unstable when
and it is locally stable if the inequality is reversed. Irrespective of R, however, the initial increase of b entails that near the gene fixation edge the fraction M of males moves close to ‘/2 (LIBERMAN et al. 1990; see also LFSSARD 1980).
In the presence of recombination these “corners” and “edges” are the invariant boundaries of the gene frequency space. When R = 0, two further two-gamete invariant boundaries exist, the so-called “high comple- mentarity boundaries” where x2 = x3 = 0 or x1 = x4 = 0. The equilibrium behavior on these boundaries is governed by the results for the one locus boundaries for R = 0. Similarly, three allele boundaries are rele- vant for R = 0, and the analysis of the possible equi- librium configurations may be found in Chapter 3 of KARLIN and LESSARD (1 986).
Lewontin-Kojima model of sex determination: symmetric equilibria
A symmetric model of sex determination can be described by the following matrix MLK of probabilities that the two locus genotypes are male:
where 0 d mV d 1. We consider this to be the Lewon- tin-Kojima model of sex determination and use the abbreviation LK to stand for the matrix (22) and LKR for the case m12 = m13 in which only the number (and not the position) of heterozygous loci is important.
The recurrence equations (1 0) with the sex deter- mination given by (22) have the property that if the gene frequencies at both loci in both sexes are equal to ‘/2, then the gene frequencies will remain at Yz. That is, if x1 + x:, = Yz, yl + y:, = !A, X I + x3 = ‘/2 and yl + y3 = %, then xi + x; = yi + yb = x; + xi = y{ = yQ = Y”. The collection of points with all gene frequencies equal to ‘/2 will be called, by analogy with classical two locus theory, the symmetric hyperplane. It may also be characterized by x1 = x4, x:, = x3, yl = y4, and y2 = y3,
so that
Substituting (23) into (9) produces
M = (mll + m14 + m12 + m13)/4
= (mil + m14 + m12 + m13)/4
+ Di[ 1 - R2/(1 - 2M)‘]
.(mil + m14 - m12 - mls), (24)
in the symmetric hyperplane. Equilibria in the symmetric hyperplane are called
symmetric equilibria, and from (23) and (1 6) we need only to characterize 6, to determineA a symmetric equilibrium. The expression (24) for M may be sub- stituted into the left side of (loa) and the values of ii and,$ expanded using (23) and (16). After simplifica- tion we have
&{&’ - 2&[1 + R + m l l + m14(1 - 2R)]
+ m l l + m14(1 - 2R)j = 0. (25)
The symmetric equilibria are therefore of two classes. The first has 8~ = 6; = & = 0 so that
* A , . A A A A A x1 = x:, = x3 = x4 = yl = y2 = y3 = y4 = Y4, (26a)
and is the central point. Here M takes the value
= (mll + m I 2 + m13 + m14)/4. (26b)
The second class of symmetric equilibria zorresponds to fractions of males in the population, M , which are the roots of the quadratic equation
Q ( M ) sf 4M2 - 2M[1 + R + m l l + m14(l - 2R)]
+ mll + m14(1 - 2R) = 0. (27)
These roots may then be substituted into (24) to yield 5,:
6; = fi - (mil + m14 + m12 + m13)/4
( m l l + m ~ 4 - m l z - m l ~ ) [ l -R‘/(I - 2 ~ 2 ) ~ l ’ (28)
The resulting values of d G give 6; and 6% from (1 6) and hence solutions of the form (23).
The central point (26a) exists for all choices of MLK of the form (22). Existence and validity of the roots of (27)) however, require further analysis. Note first that Q(I/z) = -R d 0 while Q(0) 3 0 and Q(1) 3 0 so that (27) has real roots. Next observe that at R = 0

Linkage in a Model of Sex Determination 303
the two roots of (27) are
say. If A? = !h then the symmetric equilibria belong to a surface of equilibrium points (see e.g., KARLIN and LESSARD 1986, Ch. 3). At R = 0 two equilibria with M = '/2 may exist on the high complementarity edges where one of the complementary pairs (AB, ab) or (Ab, uB) is absent. Also on these edges at R = 0 are equilibria of the form
. A
X ] = x 4 = jl = j4 = !h, i* = x3 = y2 = j 3 = 0
i l = 324 = jl = j4 = 0, x2 = x3 = 92 = y3 = 1/2,
* A
and (30) A , . . . . .
with DC = f!h (i.e., & = 6% = f%) and M = M h c .
(The condition for existence of the M = '/2 equilibrium on the high complementarity edges for R = 0 is described by Figure 1 with m14 replacing m12 on the vertical axis.)
The equilibria (30) correspond to what are usually called high complementarity equilibria in multilocus vi- ability studies. For R > 0 the equilibria given by the (valid1 roots of (27) are neither sex-symmetric nor of the
form M = 1/2. This is a major departure from the single locus case, although the two-locus equilibria retain the sex-symmetry of the gene frequencies. We now pre- sent the conditions under which the high complemen- tarity equilibria are valid.
Validity of the symmetric equilibria For R > 0 one root of (27) is greater and one is less
than ' / z . De$gnate the larger and smaller roots of (27) by M L and M, respectively. Then M l > '/2 and $is < ' / 2 .
Further
Q y = R [ ( m l l - l ) + ( m 1 4 - 1)(1 - 2 R ) ] < O (31a)
unless mil= 1 and m I 4 = 1, or m l l = 1 and R = 1/2, or R = 0, and
unless m l l = 0 and m14 = 0, or m l l = 0 and R = !h, or R = 0. Setting aside these degeneracies, (31a) and (3 1 b) demonstrate that
MS < (1 - R) /2 , MI > (1 + R ) / 2 (32a)
so that
(1 - 2M)' > R 2 . (32b)
For validity of a root 2 of (27) we must show that
6: defined by (28) is indeed positive and that (6;)' and (6%)' corresponding to (28) are both less than %6. In APPENDIX 1 we show that if
+ dm142 - mll - m12 - m13 - m14)
then M l is the valid root of (27) provided that
2 - m12 - m13 < mll + m14 < m12 + m13, (34a)
while fi, is valid provided that
2 - m12 - m13 > m l l + m14 > m12 + m13. (34b)
If Ro < 0 then neither root of (27) is valid. Consider f i i and $Is as functions of R . From (29)
if m l l + m I 4 > 1 then &(O) = ( m l l + mI4)/2 and d,(O) = 1/2, and these are reversed if ml 1 + m14 < 1 . Implicit differentiation of k with respect to R in (27) reveals that
and
- aMs = -2(Ms + m14 - 2 M s m 1 4 ) / A < 0, (35b) dR
where A is the discriminant of (27). Thus whichever root is valid under conditions (33) and (34), the sex ratio at symmetric equilibria departs further from even as R + Ro. Note also that the product k(1 - k), which has been used as an analog to the mean fitness in classical viability studies, is also a decreasing function of R . This follows because
a aM - [M(l - k)] = (1 - 2 M ) - < 0 (36) aR aR
by (35a), (35b) and M s < ?h < k~. The symmetric equilibria that emerge from a sym-
metric equilibrium with even sex ratio as R increases from 0 provide an important departure from the LK viability model. In the viability model all symmetric equilibria emerge from high complementarity edge equilibria with mean fitness ( a + d ) / 2 at R = 0, and this corresponds to the class M = (mil + m14)/2. The above analysis suggests that equilibria with M = '/z at R = 0 on the symmetric hyperplane may give rise to valid isolated equilibria as R increases.
Stability of the linkage equilibrium point We saw in the previous section that if one of the
pairs of inequalities (34a) or (34b) holds, then there are two high complementarity equilibria if R < Ro with Ro defined in (33). The central point (26a) always exists and linearization of (10) in the neighborhood

304 M. W. Feldman, F. B. Christiansen and S. P. Otto
of (26a) produces a 6 X 6 matrix whose nonzero eigenvalues are those of a 3 X 3 matrix. From these the conditions for local stability of the central point (26a) are
mI4 - mll > I mlp - mI3 I and A& ‘/z (37a)
or
m14 - mll - I m12 - m13 I and kc> ‘12 (37b)
and
R > Ro. (374
When (37a) or (37b) holds, the central point is stable for sufficiently loose linkage. In APPENDIX 2 we show that if (37a) or (37b) holds, then Ro < Yz.
Inequalities (37) tell us that if& < ?h, the conditions on mij for stability of f i C are 5xactly those expected if mg were viabilities, while if M, > Yi it is 1 - mg that behave like viabilities. These conditions emerge from the stability analysis of the central point as an equilib- rium of the one-locus four-allele LK model with R = 0 and may be inferred from Theorem 3.3 of KARLIN and LESSARD (1 986); see also CHRISTIANSEN (1 989).
A very simple special case of conditions (37) for the LKR model emerges from an example treated by KARLIN and LESSARD (1986; p. 166). They took mI4 = 1, mll = mI2 = 0. With these parameters the solution of (27) depends only on R:
M=” 1 R + R(l + 4/R)’/’ 2 4 (38)
Note that since 2(1 - mI2) > mll + mI4 > 2m12 in this case only the root M s < !h of (27) is valid. Substitute df from (38) into (28) to obtain
1 - 2R + 5R2/2 + R3
40; = - (R - R2/2 - R3)(l + 4/R)’/‘
1 - 2R
= H(R), (39)
say. We may then combine (38) and (39) in (23) and (16) to obtain the equilibrium chromosome frequen- cies
i 1 = i 4
= ’/4 f ‘/4 [ l - R/2 + (R/2)
- (1 + 4/R)’/2](H(R))’/2 (404
x p = x3
= ‘/4 T ‘/4 [ 1 - R/2 + (R/2)
(1 + 4/R)1/p](H(R))’/p (40b)
ml
1 -
1 2 -
0 1
4
-K M = i
central point
hation
/ \ fixation
central point
M = f
0 1 - m12 1
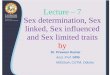
FIGURE 2.-Stability of the central point and the external stabil- ity of the sex-symmetric equilibria on the one-locus boundaries in the symmetric LKR model (m12 = mls). The value of mI2 is consid- ered fixed and m12 < %. The two regions where conditions (37a) or (37b) are fulfilled are marked “central point” and here the central point may be stable. The regions where the boundary equilibria are stable with respect to the increase of an allele at the other locus are marked “fixation.” Even sex-ratio equilibria separate the central point and the boundary equilibria in the regions marked “M = %,” and here the central point and the boundary equilibria are unstable.
j l = j 4
= ‘/4 f ‘/4 [ l + R/2 - (R/2)
- (1 + 4/R)1/p](H(R))’/p (404
j 2 = j 3
= ‘/4 T ‘/4 [ 1 + R/2 - (R/2)
- ( 1 + 4/R)’/‘](H(R))’/’. (404
Substituting into Ro we see that the central point is stable for R > ‘/6 and the results from the next section demonstrate that two symmetric equilibria (40) are stable for R C ’/e.
The conditions (37a) or (37b) are linked to the external stability conditions of the sex-symmetric equi- libria on the one-locus boundaries (CHRISTIANSEN 1989). Figure 2 depicts these conditions in the LKR model; conditions (37a) or (37b) are fulfilled in the sectors marked “central point” and the external sta- bility condition at the one-locus equilibrium is satisfied in the sectors marked “fixation.” If neither the central equilibrium nor the one-locus boundary equilibria are stable due to violation of these conditions, then at- tracting points on a surface with M = ?h separates these two classes of equilibria.
Stability of the symmetric high complementarity equilibria
For most of the following analysis we use the LKR model, i .e. , m12 = m13. At the end of the next section some of the ramifications of this assumption will be

Linkage in a Model of Sex Determination 305
4
1 - mll 1 0 -
2 2m1z
FIGURE 3,”Stable equilibria on the hyperplane p , = ‘/z and p 2 = % of symmetric points (23) for R = 0 in the symmetric LKR model (mls = m13). The value of m12 is considered fixed and m12 < %. The regions where the central equilibrium is stable within the hyper- plane are marked “central point,” those where the central equilib- rium is unstable within the hyperplane are marked “H.C.” when the high complementarity equilibria on the boundary are stable within the hyperplane, and “M = %” when the even sex-ratio points exist and are stable within the hyperplane.
discussed. We first record properties of the four-allele one-locus model that is identical to the LKR model at R = 0. There can be only one fully polymorphic isolated equilibrium, given by (26a) and the conditions for its stability are (37a) or (37b). According to KAR- LIN and LESSARD (1986, Ch. 3, Theorem 3.4) fi = ‘/2 equilibria are in a two-dimensional surface of equilib- ria. No isolated equilibrium with three chromosomes present can be stable at R = 0 (KARLIN and LIBERMAN 1976; KARLIN and LESSARD 1986, Ch. 4) but curves of h = ‘/2 equilibria are possible.
The symmetric equilibria that solve (27) emerge from symmetric equilibria at R = 0. In the AB, ab edge (x2 = y2 = x3 = y3 = 0) there may be convergence to fixation in one chromosome, to a polymorphism with x1 = x4 = yl = y4 = ‘/2 and fi = (mil + ym4)/2, or to one of two isolated polymorphisms with M = ‘/2 and x2 = y2 = x3 = y3 = 0 (Figure 1 with m14 replacing m12). The sex-symmetric polymorphism on the boundary is a symmetric equilibrium, and the conditions for sta- bility at R = 0 of the symmetric high complementarity equilibria with M = (mll + m14)/2 are
m14 > mll and 1 > ~ I I + m14 > 271112 (41a)
m14 < m11 and 1 < m l l + m14 < 2mI2. (41b)
The last inequality in (41a) and (41 b) relates to the external stability while the others are simply restate- ments of the conditions for stability within the bound- ary (Figure 1 with mI4 replacing mI2). The last ine- qualities in (41a) and (41b) are the conditions for stability within the hyperplane of symmetric points
or
4
central point
0 m u + l - m n 1
FIGURE 4.-Combination of Figures 1 , 2 and 3 for R = 0 in the symmetric LKR model (mI2 = m,s). The value of m12 is considered fixed with mI4 < ‘h. The regions where the boundary equilibria with p = Yz are the only stable equilibria are marked “ p = % boundary.” Here the boundary high complementarity equilibria are unstable within the boundary and the corresponding boundary M = l /n equilibria do not exist. The regions where the central point is the only stable equilibrium are marked “central point.” The regions where the symmetric high complementarity points on the boundary are the only stable equilibria are marked “H.C.” The region where the monomorphic equilibria are the only stable equilibria is marked “fixation.” Outside these regions, points with M = % exist and are stable within some of the hyperplanes and boundaries analyzed in the text.
given by (23), and condition (41a) is illustrated in Figure 3. The condition for stability of the central point within the symmetric hyperplane is Ro < 0 (see 37c), and this condition is also shown in Figure 3. When both the high complementarity points and the central points are unstable, then at R = 0 a pair of even sex-ratio equilibria (2 = %) exists (see 29), and these equilibria are stable within the symmetric hy- perplane (CHRISTIANSEN 1989).
Condition (41a) for the stability of the high comple- mentarity equilibria at R = 0 is shown in Figure 4 which synthesizes the conditions depicted in Figures 1, 2 and 3, as well as Figure 1 with m14 replacing mI2 to exhibit the dynamics on the high complementarity edge. The sector marked “M = %” comprises param- eter values where surfaces of even sex-ratio eguilibria exist, and on the borders of this section M of the prevailing isolated equilibrium becomes one half.
At R = 0 the two isolated points with M = ‘/z on the high complementarity edge have eigenvalues 1 with respect to invasion by new chromosomes (ESHEL and FELDMAN 1982a). In the same way the 6 = ‘/z equilib- ria on the symmetric hyperplane have eigenvalues 1 governing the movement of the population away from the symmetric hyperplane. These equilibria are there- fore on the M = ‘/2 surface at R = 0 whenever they exist. AFor R > 0, however, no symmetric equilibria with M = ‘/z exist.

306 M. W. Feldman, F. B. Christiansen and S. P. Otto
For R > 0 recall from (34a) that the larger root, A&, of (27) is valid if
2(1 - m12) < mll + m14 < 2m12 (42a)
and from (34b) the smaller root, f i s of (27) is valid if
2(1 - m12) > m l l + m14 > 2m12, (42b)
provided that R < Ro. The local stability of these is analyzed in the standard way by linearizing (1 0) in the neighborhood of the pair of equilibria specified by the appropriate M .
The local linear transformation is, on first exami- nation, specified by a 6 X 6 matrix. After re- arrangement this factors into three 2 X 2 matrices whose characteristic polynomials are
and
where
21&[1 - R2/(1 - 2M)']
L = .(2M - 1) + el + A(e2 - el) .. A
2M(1 - M )
and
l"dz[R(el + en)/(l - 2 4
K = + R2(e2 - el)/(l - 2M)2] A A
M(1 - M ) 9
with *
1 = m l l + m14 - 2m12,
el = [mll + ml4(l - 2R)]/2,
e2 = 1 - R - [mil + m14(1 - 2R)]/2.
The equilibria specified by M L or M s are stable if the six roots of Ql(X) = 0, &(A) = 0, and Q3(X) = 0 are all less than unity in absolute value. The following is an
outline of the derivation of the conditions for stability. The algebra is omitted.
It is first shown that the roots of Qs(X) = 0 are real and the larger one is positive. Then dQs/dX is evalu- ated at h = 1 and shown to be positive. With these in hand, the roots of are greater or less than unity in absolute value according to whether Q3( 1) is nega- tive or positive respectively. Repeated use of (27) reveals that the sign of Q3(l) is the sign of
(1 - 2M)Z 1 - - 1 + - . (44) A - [ 1 !2M][ 1 ?2M]
Now refer to (42a) and (42b). If 1" is positive then ilk < '12 is the relevant root of (27) and, by (32), R < 1 - 2Ms so that (44) is positive and both roots of Q3 are less than unity. If I" is negative than A& > '/z is the relevant root of (27) and, by (32), R < 2fit - 1 so that (44) is positive. With respect to Q3(X), therefore, both eigenvalues are less than unity under the existence conditions (42a), (42b) and R < Ro.
A similar analysis of @(X) and &(X) reveals that both have real roots, the larger of which is positive, and that these eigenvalues are less than unity in ab- solute value if both of the following inequalities hold:
(1 - 2M)[~2 - (mil + m12)/2 + &m12 - mil)] > o (454
If either of these inequalities is reversed, then the equilibrium is unstable. From (37a) and (37b) for R sufficiently close to RO (so that & is very small) these inequalities are satisfied for whichever of M t or M s is relevant. Near R = 0 we have seen in (29) that the relevant high complementarity equilibrium may emerge from the boundary equilibrium with M = ( m l l + m14/2 or from the symmetric equilibrium with M = %. In the former case, which is analogous to the high complementarity point in classical sym- metric viability models, (45a) and (45b) rFduce to (414 and (41b). Thus whichever of kt or M , = '/2 is relevant at R = 0, this high complementarity equilib- rium is stable near R = 0 when the symmetric M = ' / z equilibrium does not exist for R = 0 (Figs. 3 and 4). The symmetric equilibrium with M = '/z, which may exist for R = 0, produces equality in conditions (45a) and (45b) corresponding to eigenvalues of one. Any symmetric equilibrium is stable near R = Ro when (37a) or (3'7b) are satisfied.
In concluding this section we recall the results of FELDMAN and LIBERMAN (1979) concerning the over-

Linkage in a Model of Sex Determination 307
lap of stability of the high complementarity equilibria, or the central point, with the four chromosome fixa- tion states in the symmetric viability model. Analogous phenomena are possible in the symmetric model of sex determination. When Ro > R > R*, with R* given by (1 8c'), the high complementarity points and chro- mosome fixation states can be simultaneously stable. Similarly, when R > max(R0, R*) and (37a) or (37b) holds, the central point and corners can be simulta- neously stable.
The Ewens Gap For the classical symmetric viability model, EWENS
(1 968) showed that there exists an interval of recom- bination values where the high complementarity equi- libria exist but are unstable. We might expect similar behavior for the high complementarity equilibria in the sex determination case. Keep in mind, however, that at R = 0, equilibria with M = % can be stable on the high complementarity edge. These add a new wrinkle to Ewens gap.
The complete stability analysis of the high comple- mentarity equilibria in the symmetric viability model was made by EWENS (1 968). He showed that the cubic characteristic polynomial factors into three linear terms, the first of which gives the inequality (2) above. From the other two roots, if the viabilities obey ine- quality (4b) above, then Ewens' gap exists. In terms of the LKR viability matrix these two roots are
A* = (a + 6)/2 f 2(b - a)6 [a + d( l - 2R)]/2 (46)
where 6 is given by (1) above and the denominator of (46) is the equilibrium value of the mean fitness.
Rewrite (45a) and (45b) as
From (1 Oi) we may identify 6, in (47) with 2 6 in (46). If we further identify M with the mean fitness, i.e., the denominator in (46), we have a complete analogy between the bracketed term in (47) and 1 - A* in (46). In other words, when k < Yz we expect that the conditions on m l l , m12 and m14 that produce a gap of instability in the sex determination model should be of the form (4b) while if k > ?4 inequality (4b) should be reversed. It remains to see how an equality of the form (4b) may be inferred from inequalities (45a) and (45b).
Consider first ks < !A. Then the high complemen- tarity equilibria are unstable if
hs - (mi l + m12)/2 & &(mi2 - mil) C 0, (48)
i e . , if
- ( ~ I I m14 2m12)/4 A
f DG(ml2 - mll) + (m14 - m11)/4 0. (49)
From (28) we may write (49) as
i Z [ 1 - R ~ / ( I - 2M)21(m11 + m14 - 2mI2)
* d G ( m I 2 - mll) + (m14 - m11)/4 0. (50)
For validity of hs, (34b) gives ml l + m14 > 2ml2 and, with (32b), the coefficient of 6; in (50) is positive.
If mll + m14 < 1 then, at R = 0, M, = (mil + mI4)/? and (48) cannot hold. In this case, when m14 > mi I , M, is stable in intervals near R = 0 (Figure 4) and R = Ro. If m l l + m14 > 1 then at R = 0 ds = 'h and it is stable in the symmetric hyperplane if m l l + m14 < 2(I - m12) (Figure 3).
The sum of the last two terms on the left side of (50) is bounded between (mll + m14 - 2m12)/4 and (m14 + 2mI2 - 3m1 1)/4 where the first bound is positive by (34b). If m12 > m l l both of these are positive and (50) cannot hold. If m l l > m12 then we proceed to consider the discriminant of the left side of (50) as a quadratic in 6 G . In order for (50) to hold, this discrim- inant must be positive; i.e.
(m12 - mil)' - (m14 - mll)(mll + m14 - 2m12)
[ 1 - R2/(1 - 2k)*] > 0. (51)
Thus from (32b) we obtain
(m12 - m11)' > (m14 - mli)(mll + m14 - 2m12) (52)
as a sufficient condition for d, = '/2 to be unstable. Rearranging, (52) is equivalent to
[(ml4 - mil) - (m14 - m12)I2
> (m14 - mll)[P(ml4 - m12) - (m14 - mll)]. (53)
Since m11 > m12, inequality (53) is true provided
(m14 - m12) > (2 + &)(m14 - mil). (54)
Clearly (54) is identical in form to (4b) which gives the Ewens gap in the LKR symmetric viability model. When m l l + m14 < 1, then an argument parallel to the above can be made for the equilibrium specified by M I > ?h, which extends from MI = '/2 at R = 0. In this case the condition for a gap of instability extend- ing from R = 0 is
m14 - m12 < (2 + f i ) ( m 1 4 - mil), (55)
the reverse of the classical inequality. We have not been able to derive sufficient condi-
tions for the existence of the more familiar form of Ewens gap, namely that applicable to equilibria ex- tending from $ = (mil + m14)/2 at R = 0. From (51), however, it is clear that (54) or (55) are necessary for its existence. In our numerical work, which is the

308 M. W. Feldman, F. B. Christiansen and S. P. Otto
subject of the next section, those cases that give rise to the gap of instability satisfy either (54) or (55). It does seem reasonable to speculate that if fi c Yi, a gap will exist if (54) holds while if fi > %, (55) is the appropriate condition. We would also predict that if R* < Ro, and Ewens gap exists, then either the chro- mosome fixation states or M = Y2 should be stable depending on whether the high complementarity equilibria emerged from k = ( m l l + m I 4 ) / 2 or
In his analysis of the local stability of the high complementarity equilibrium in the LK viability model, EWENS (1968) was able to factor the charac- teristic polynomial to obtain the eigenvalues explicitly. The LK sex determination model, i.e., the case m I 2 # m l g does not yield to such a direct analysis. The characteristic polynomial for the local stability of the central point factors to produce the conditions (37a,b,c). For the other symmetric equilibria, how- ever, the characteristic polynomial factors into a quad- ratic and a quartic. The quadratic yields the condition R < Ro for stability of the appropriate high comple- mentarity equilibria. The fourth degree polynomial reduces, when m12 = m13, to the product of @(A) and &(X) in (43a,b). We have made an analysis similar to that leading to (45a) and (45b) but omit the details here. Suffice it to say that a necessary condition for the high complementarity equilibria to be unstable at R = O i s
Qml2 - m13)'/4
A= %.
- l(ml4 - mll)(mll - m12)(m11 - m13)
+ (m11 - m12)*(m11 - m13)' > 0, (56) - where 1 = m l l + m I 4 - mlp - m13.
If we return to EWENS' (1968) analysis and substi- tute his viabilities for our my in (56) we arrive at exactly the condition that the quadratic (4a) in R have real roots. Once again the sex-determination model differs from the viability case in that the latter does not allow a stability gap near R = 0. Of course near R = Ro the conditions relating ( m I 4 - mil) and (m12 - m I 3 ) to the sign of (1 - 2M,) (as in (37)) apply.
Numerical results for the LKR model One hundred parameter sets, each a triplet m1 1,
m12 = m 1 3 , m I 4 were chosen at random uniformly on [0 , 11. For each of these, four initial conditions (x], xp, xg, x 4 ; y l , y2, y 3 , y4) were chosen at random within lop5 of (a) the chromosomal fixation state (1, 0, 0 , 0; 1, 0, 0, 0), (b) the allele fixation state (Y2, 1/2, 0, 0; ' / 2 , Y2, 0, 0), (c) the high complementarity edge equilibrium ( I h ,
0, 0, Y2; %, 0, 0, %), and (d) the central point (%, %, %, %; %, %, %, %). From these initial conditions the recursion system (10) was iterated until successive maximum variable differences were less than 10"2
and in some cases less than 1 0-l6. In each case recom- bination values in [0, 1/21 were selected according to the positivity of Ro; in cases where Ro > 0 we focused more in the range 0 S R G Ro. In other cases we chose values of R more evenly dispersed in [0, 1/21.
Of the 100 cases, 15 converged to the centroid (linkage equilibrium point) from all four starting con- ditions and for all R > 0; in all of these Ro < 0. Five cases gave chromosomal fixation and six gave allele fixation from all starting conditions. In 42 cases the symmetric high complementarity equilibria were sta- ble for some range of R in [0, Ro]. In all of these cases part of the range of stability was of the form [R1, Ro) so that the stable high complementarity points merged into the stable central point. The high complementar- ity point A?l = ( m l l + m14) /2 was stable at R = 0 in 21 of these 42 cases. Of these 2 1 cases, 20 were such that the high complementarity points were stable in [0, Ro) while only one gave rise to the classical form of Ewens gap, with an interval of instability fully contained in (0, Ro). An additional six parameter sets (mil, m I 2 = m13, m14) were chosen subject to the constraints that fi = ( m l l + m 1 4 ) / 2 C Yi be stable at R = 0, the central point be stable for R > Ro, and that ( m I 4 - m12) > ( 2 + 4 ) ( m I 4 - mil). In each case an interval of instability fully contained in [0, Ro) was found, and in this interval all starting conditions resulted in conver- gence to chromosome fixations. Thus, although we have not proved that (54) and (55) are the conditions for existence of a classical Ewens' gap, there is little doubt that at least they are extremely good approxi- mations.
The remaining cases that produced symmetric high complementarity equilibria somewhere in [0, Ro) de- serve more detailed comment. Seven of them satisfied either (54) or (55) and for small values of R iteration from all starting conditions moved the population to an M = Y2 surface. For R near to but less than Ro, and starting conditions near the high complementarity edge or the central point, there was convergence to a symmetric high complementarity point, i e . , a root of (27). From these same starting conditions increasing R above Ro resulted in convergence to the central point. From points near the cornersAor allelic fixation edges there was convergence to M = ' /2 for all R. Clearly there are domains of attraction to M = '/2 and isolated symmetric equilibria for the same R value. These seven cases are examples for which (5 1) is true at R = 0 and for which we have a modified version of Ewens gap for high complementarity equilibria, namely a gap from R = 0 to some value less than RO in which the high complementarity equilibria exist but are unstable.
In the remaining 14 cases that produced high com- plementarity equilibria, iteration fromA near corners or allelic fixation edges resulted in M = Yz. From

Linkage in a Model of Sex Determination 309
starting points near the high complementarity or cen- tral points, there was convergence to = Yi at R = 0 but for R very small there was convergence to a symmetric equilibrium, a root of (27), namely that emerging from M = Yi at R = 0. No gaps of stability in [0 , Ro) were seen in these cases, although in 3 cases there were simultaneous stability of corners and high complementarity points, and in an additional 3 the corners and central point were stable together.
In all 42 examples that produced stable equilibria with 6, # 0 the linkage disequilibrium exhibited a property well known from yultilocus viability studies, namely d6G/dR < 0 when &(R) varies along a stable trajectory of equilibria.
Thus 68 of the randomly chosen parameter sets produced equilibria that were at least reminiscent of the familiar symmetric viability system. The remain- ing 32 all converged from every starting condition to points on 2 = YP surfaces. In no case was there convergence to an isolated asymme_tric equilibrium. In many of those that converged to M = YP there were specific points on the surface that appeared to be semi-symmetric in the sense that x1 = x4, yl = y4 but X P
# x3 and y2 # y3. Such points can be obtained explicitly from the relations M = YP, 6, = 0 assuming, e.g., x1 = x4, yl = y4 only. In the numerical iteration points of this kind arose frequently but convergence to them was always extremely slow.
Stable asymmetric equilibria may arise, however, in the LK model, i e . , when mI2 # mI3. We were led by the results of HASTINCS (1985), described above, to chose mll = 0.36, m12 = 0.32, m13 = 0.24, m I 4 = 0.4. Here the corners are stable for R > 0.0237288, the high complementarity points are stable at R = 0 and, since m I 4 - m l l < m12 - m13, the central point cannot be stable. Therefore the high complementarity points cannot be stable for R very close to Ro. In a small interval including R = 0.022 we observed four stable asymmetric equilibria, 2.e. isolated equilibria with x1 # x4, y~ # y4, X P # XQ, y2 # y3. For R > 0.0237288, the four chromosome fixations were stable.
DISCUSSION
One locus models of autosomal sex determination predict that evolution proceeds toward the state at which the sex ratio is even, as suggested by FISHER (1930). The dynamics of a population with variation in the sex ratio is therefore reminiscent of the dynam- ics of a population with variation in the probability of survival to sexual maturity where the average fitness increases every generation. This fundamental prop- erty of one-locus viability selection breaks down if linked loci with epistatic interactions in fitness are considered. If additive epistasis is absent, then the mean fitness increases globally (EWENS 1969; KARLIN and LIBERMAN 1990), but this property does not gen-
eralize, even in the limit of slow selection considered by FISHER (AKIN 1979). For the case of sex determi- nation, this violation of the principle of optimization is clearly demonstrated by the simultaneous existence of even sex-ratio equilibria and locally stable symmet- ric equilibria with a sex ratio that deviates from equal proportions of males and females.
In addition, from these parallel properties there appear to be several interesting qualitative differences between the well known results for the symmetric viability model and the symmetric sex determination model analyzed here. The most obvious is the central role played by M = Yz surfaces. It was known from multiple allele theory that when the viability analo- gous (usually called sex-symmetric in the one locus context) equilibria are not stable, then the &i = YP surface is. We have seen here that in the two locus case, M = YP and isolated symmetric equilibria with M # Yi may be simultaneously stable. Of particular in- terest is our finding that points which for some R are in a domain of attraction to M = Y2 might belong to the domain of attraction of an isolated symmetric equilibrium for larger R.
The conditions for existence of stable fully poly- morphic equilibria in one locus viability models be- come more stringent as the number of alleles increases (LEWONTIN et al. 1978; KARLIN 198 1). With tight linkage the same is true as the number of loci in a multilocus viability system increases. We might spec- ulate that as the number of loci or alleles increases, the relative importance of fi = YP (measured, e.g., by the size of its domain of attraction) also becomes greater.
The isolated symmetric points with M = Yz at R = 0 on the high complementarity hyperplane have no analogy in the classical symmetric viability model. It is not surprising that the high complementarity roots of (27) which emanate from these exhibit novel sta- bility properties such as the gap of instability near R = 0. On the other hand, the symmetric equilibria emanating from fi = ( m l l + mI4)/2 at R = 0 behave very much like the high complementarity equilibria in symmetric viability models.
Throughout the stability analysis, the contingency of conditions on M < or M > '/2 is apparent. In general, an equilibrium with M < '/2 is subject to stability conditions closely related to the classical sym- metric viability model with viabilities my. If hi > Yi, mij must be replaced by 1 - my. The importance of this distinction can be illustrated by two examples whose viability analogs are very well known.
The first example is a symmetric multiplicative model of the LKR type with
m l l = a(1 - s ) ~ ,
m12 = m I 3 = a(1 - s), m14 = a < 1. (57)

310 M. W. Feldman, F. B. Christiansen and S. P. Otto
With a d 1, s > 0 it is obvious that and
mll + m14 > 2m12. Here we have
and the high complementarity equilibria (MS) exist for R < Ro. For 2/(2 - s)’ + !A > a > 2/(2 - s ) ~ , however, (58) is negative so that the high complementarity equilibria do not exist. Further, the central point is unstable. For example, if s = 0.1, a = 0.6, then m l l = 0.486, m12 = 0.54, mI4 = 0.6. Hence m l l + mI4 > 2m12, but 2(1 - m12) < m l l + mI4. Here the chromosome fixations are unstable, the high complementarity points do not exist, RO < 0 but the central point is unstable. This suggests that only the surface k = ?h can be stable and numerical iteration bears this out. Note that this is a case where RO < 0, mI4 > mll but 2(1 - m12) < m l l + m14. The instability of the central point here for all R contradicts the claim by KARLIN and LESSARD (1986; p. 171) that the central point is always stable at R = ‘h. It appears that in deriving their Corollary 5.1, using the methods of KARLIN and LIBERMAN (1 979a,b,c) and KARLIN and AVNI (1 98 l), some of the constraints imposed by the eigenvalues computed in the earlier studies escaped detection.
A second example is an additive model of sex de- termination which should be compared to the classical two-locus additive viability model (see e.g., EWENS 1979). The matrix of sex determination is
a1 + P1 a1 + P 2 a2 + 81 a2 + 82 f f 1 + P 2 f f 1 + 8 3 a 2 + 82 a2 + P 3
ffz + P I ff2 + P 2 a3 + 81 a 3 + 82 a2 + P 2 a2 + P 3 a3 + 8 2 a3 + 8 3
Here the linkage equilibrium point is A , .
21 = j l = i A i B , 22 = y*2 = P A P , ,
where
The validity of (59) requires a2 > a], a3 or a:, < al , a3 and 8 2 > 81, 83 or PZ < PI, Ps.
Once again the cubic characteristic polynomial for local stability of (59) factors into three linear terms. The conditions of (43) are then
(a2 - a1)(1 - 2M) > 0, (61)
(82 - P1)(1 - 2M) > 0, (62)
where
R > 0, (63)
Clearly if A? < ?I:,, stability requires “overdomi- nance” in male dctermination, i.e., a2 > a1, a3 and /32
> 81, P 3 , but if M > ‘/2 stability requires “overdomi- nance” in female determination, i.e., 1 - a2 > 1 - a], 1 - a 3 and 1 - 8 2 > 1 - P I , 1 - P 3 in accordance with the expectation that optimization occurs in the addi- tive viability model (EWENS 1969; KARLIN and LIB- ERMAN (1990). These results apply to the general additive model, but if a1 = a3 and PI = P3, the additive model is also of the LK type and conditions (61) and (62) reduce to (37).
During the numerical analysis we monitored the evolutionary properties of several functions. The tra- jectory of M during evolution was often not monotone especially in those cases where more than one type of equilibrium was stable for a fixed value of R (see also LESSARD 1989). We found no cycling of the type described by HASTINCS (1981) but we sampled far fewer parameter sets than +e did. In many of the examples that converged to M = Yz, the point on this surface that was approached was of a semisymmetric type, with x1 - x4, yl - y4 very close to zero and no apparent relationship between x:, and x3 or y:, and y3.
It is not difficult to solve (10) at equilibrium with M = Yi, Dc = 0 and i1 = i4, j1 = j4 and ind$ed in many cases this solution was the point on the M = ?h surface that was approached, albeit very slowly.
From an analytical point of view the most interest- ing dynamics occur in our model when there is epis- tasis and quite strong linkage. These are the c?ses where 6, is most likely to be nonzero and hence M # %. If a natural population is observed to depart con- sistently from an even sex ratio, it might provide an opportunity to uncover a set of loci whose population frequencies exhibit strong linkage disequilibrium. With loose linkage, however, the central point with linkage equilibrium and M # ’/2 may also exhibit a large domain of attraction.
The authors thank professors W. J. EWENS and R. C. LEWONTIN for their comments on an earlier draft of the manuscript. Research was supported in part by National Institute of Health grants GM 10452 and 28016, by grant 11-7805 from the Danish Natural Science Research Council, and by grants from the Research Foun- dation of Aarhus University and the United States-Israel Binational Science Foundation.
LITERATURE CITED AKIN, E.,1979 The Geometry of Population Genetics (Lecture Notes
BODMER, W. F., and A. W. F. EDWARDS, 1960 Natural selection in Biomathematics 31). Springer-Verlag, New York.
and the sex ratio. Ann. Hum. Genet. 24: 239-244.

Linkage in a Model of Sex Determination 31 1
BODMER, W. F., and J. FELSENSTEIN, 1967 Linkage and selection: theoretical analysis of the deterministic two locus random mat- ing model. Genetics 57: 237-265.
BULL, J. J., 1981 Coevolution of haplodiploidy and sex determi- nation in the Hymenoptera. Evolution 35: 568-580.
BULL, J. J., 1983 Evolution of Sex Determining Mechanism. Benja- min-Cummings, Menlo Park, Calif.
CHARNOV, E. L., 1978 Sex-ratio selection in eusocial Hymenop- tera. Am. Nat. 112: 317-326.
CHARNOV, E. L., 1982 The Theory of Sex Allocation. Princeton
CHRISTIANSEN, F. B., 1988 Epistasis in the multiple locus symmet-
CHRISTIANSEN, F. B., 1989 The multiple locus symmetric fertility
ESHEL, I . , 1975 Selection on sex ratio and the evolution of sex
University Press, Princeton, N.J.
ric viability model. J. Math. Biol. 26: 595-618.
model. Theor. Popul. Biol. 37: 39-54.
determination. Heredity 34: 351-361. ESHEL, I . , and M. W. FELDMAN, 1982a On the evolutionary ge-
netic stability of the sex ratio. Theor. Popul. Biol. 21: 430- 439.
ESHEL, I . , and M. W. FELDMAN, 1982b On the evolution of sex determination and the sex ratio in haplodiploid populations. Theor. Popul. Biol. 21: 440-450.
EWENS, W. J., 1968 A genetic model having complex linkage behavior. Theor. Appl. Genet. 38: 140-143.
EWENS, W. J., 1969 Mean fitness increases when fitnesses are additive. Nature 221: 1076.
EWENS, W. J., 1979 Mathematical Population Genetics. Springer- Verlag, Heidelberg.
FELDMAN, M. W., and U. LIBERMAN, 1979 On the number of stable equilibria and the simultaneous stability of fixation and polymorphism in two-locus models. Genetics 92: 1355-1 360.
FELDMAN, M. W., and S. P. OTTO, 1989 More on recombination and selection in the modifier theory of sex-ratio distortion. Theor. Popul. Biol. 35: 207-225.
FISHER, R. A., 1930 The Genetical Theory of Natural Selection, 2nd Rev Ed., 1958. Dover Publications, New York.
HAMILTON, W. D., 1976 Extraordinary sex ratios. Science 156:
HASTING, A,, 198 1 Stable cycling in discrete-time genetic models. Proc. Natl. Acad. Sci. USA 7 8 7224-7225.
HASTING, A., 1985 Four simultaneously stable polymorphic equi- libria in two-locus two-allele models. Genetics 109: 255-261.
KARLIN, S., 1981 Some natural viability systems for a multiallelic locus: a theoretical study. Genetics 97: 457-473.
KARLIN, S . , and H. AVNI, 1981 Analysis of central equilibria in multilocus systems: A generalized symmetric viability regime. Theor. Popul. Biol. 20: 241-280.
KARLIN, S., and M. W. FELDMAN, 1970 Linkage and selection: two locus symmetric viability model. Theor. Popul. Biol. 1: 39- 71.
KARLIN, S., and S . LESSARD, 1983 On the optimal sex ratio. Proc. Natl. Acad. Sci. USA 80: 5931-5935.
KARLIN, S . , and S. LESSARD, 1984 On the optimal sex ratio: a stability analysis based on a characterization for one-locus mul- tiallele viability models. J. Math. Biol. 2 0 15-38.
KARLIN, S . , and S. LESSARD, 1986 Sex Ratio Evolution. Princeton University Press, Princeton, N.J.
KARLIN, S., and U. LIBERMAN, 1976 A phenotypic symmetric selection model for three loci, two alleles: The case of tight linkage. Theor. Popul. Biol. 10: 344-364.
KARLIN, S., and U. LIBERMAN, 1979a Central equilibria in multi- locus systems. I. Generalized nonepistatic selection regimes. Genetics 91: 777-798.
KARLIN, S., and U. LIBERMAN, 1979b Central equilibria in multi- locus systems. 11. Bisexual generalized nonepistatic selection models. Genetics 91: 799-816.
477-488.
KARLIN, S., and U. LIBERMAN, 1979c Representation of nonepis- tatic selection models and analysis of multilocus Hardy-Wein- berg equilibrium configurations. J. Math. Biol. 7: 353-374.
KARLIN, S., and U. LIBERMAN, 1990 Global convergence proper- ties in multilocus viability selection models: the additive model and the Hardy-Weinberg law. J. Math. Biol. 2 9 161-176.
LESSARD, S., 1987 The role of recombination and selection in the modifier theory of sex-ratio distortion. Theor. Popul. Biol. 31: 339-358.
LESSARD, S., 1989 Resource allocation in Mendelian populations: further in ESS theory. pp. 207-246 in Mathematical Evolution- ary Theory, edited by M. W. FELDMAN. Princeton University Press, Princeton, N.J.
LEWONTIN, R. C., and K. KOJIMA, 1960 The evolutionary dynam- ics of complex polymorphisms. Evolution 14: 458-472.
LEWONTIN, R. C., L. R. GINZBWRG and S. D. TULJAPURKAR, 1978 Heterosis as an explanation for large amounts of genic polymorphism. Genetics 88: 149-169.
LIBERMAN, U., M. W. FELDMAN, I. ESHEL and S . P. OTTO, 1990 Two-locus autosomal sex determination: On the evo- lutionary genetic stability of the even sex ratio. Proc. Natl. Acad. Sci. USA 87: 2013-2017.
MAFFI, G., and S. D. JAYAKAR, 1981 A two-locus model for polymorphism for sex-linked meiotic drive modifiers with pos- sible applications to Aedes aegypti. Theor. Popul. Biol. 1 9 19- 36.
NUR, U., 1974 The expected changes in the frequency of alleles affecting the sex ratio, Theor. Popul. Biol. 5: 143-147.
PAMILO, P., 1982 Genetic evolution of sex ratios in eusocial Hy- menoptera: allele frequency simulations. Am. Nat. 119: 638- 656.
UYENOYAMA, M. K., and B. 0. BENGTSSON, 1979 Towards a genetic theory for the evolution of the sex ratio. Genetics 93:
UYENOYAMA, M. K., AND B. 0. BENGTSSON, 1981 Towards a genetic theory for the evolution of the sex ratio. 11. Haplodi- ploid and brood sex ratio and brood size. Theor. Popul. Biol. 2 0 57-79.
72 1-736.
Communicating editor: A. G. CLARK
APPENDIX 1
Conditions for validity of roots of (27). From (16) and (32a), DE and DyC are of the same
sign and
0 S DkDyC l/16. (All
Using (24) we must have either
MC = (mil + m12 + m13 + mI4)/4 s fi (mil + m14)/2 = M h C
when mll + mI4 > m12 + m13, or
(mil + m14)/2 s M S (m11 + m12 + m13 + m14)/4 (A2b)
when mll + m14 < m12 + m13. The bounds in (A2a, b) are achieved when DE DyC = 0 or l/16. It follows that any root M in the intervals (A2a, b) corresponds to a valid disequilibrium.

312 M. W. Feldman, F. B. Christiansen and S. P. Otto
The quadratic (27) has the properties
and is therefore negative in the interval of M between "z and M h c . The roots of Q must be outside this interval. It follows then from (A2a, b) that if &, is between '/2 and k h , , the central point is the only valid symmetric equjlibrium for R > 0 and only fih5is valid at R = 0. If M, G f i h c s '/2 or '/2 s M h c s M,, then again M h , is the only valid root of (27) at R = 0. For R > 0 exactly one root of (2'7) exists in the interval between M , and fib, when Q(M,) 3 0, and this occurs if R < Ro where
If f i h c d '/2 d fi, or h, d '/2 d M h , then both roots of (27) are valid at R = 0, and for R > 0 there is exactly one valid root provided R < RO and this lies in the interval between Yi and fi,.
From (31a) and (31b) we infer in each case that if i f h , S if,, the valid root of (27) is while if d, d M,,,, the valid root is Ms.
APPENDIX 2
RO < '/z when the central point may be stable. We claim that under conditions (37) Ro < '/2. First,
the denominator of Ro in (33) is positive since it can be rewritten as
2(m11 + m12 + ml3 + m14)(1 - m14)
+ 2m14(4 - m l l - m12 - m13 - m14) > 0.
For RO < '/2 we require
ml l + m12 + m13 + m14 + 2m14(2 - m12 - ml3)
- 2m14(m11 + m14) > (2 - m12 - rnlS)(mll + m14)
+ (m12 + ml3)(mll + m14) - (mll + m14)2
- (m12 + mls)(2 - m12 - mls).
t . e . ,
(m12 + m d ( 2 - m12 - ml3) + ( m l l + m14)2
- (m11 + m14) + mI2 + ml3 645)
+ 2m14(2 - m12 - ml3) - 2??814(m11 + m14) > 0.
The left side of (A5) can be reorganized to become
[2 - ( 1 - m12 - m13)(2 - mll - m12 - m13 - m14)]
+ (m14 - m11)(2 - mll - m12 - m13 - m14),
the first term of which is clearly non-negative and the second is positive under (37).