Embed Size (px)
Citation preview

Abstract— Roball is a spherical robot designed to be a
platform to study child-robot interaction in open settings. It has
a spherical shell and uses motors attached along its rolling axis
plus an actuated counterweight for steering. It is designed to be
inexpensive and to generate a wide variety of movement. To
evaluate its locomotion capabilities in relation to the size and
weight of its components, we have derived analytical models
describing its longitudinal and lateral motion. Simulation
results are presented using MATLAB/Simulink and
SimMechanics, and validated using a real robot.
I. INTRODUCTION
spherical rolling robot is a mobile platform that moves
by using a mechanism that either change the center of
gravity or generate a force to make the robot roll on its outer
shell. Spherical rolling robots can be categorized into six
categories:
• A single driving wheel placed at the bottom inside a
sphere, attached to axis supporting a controlling box, a
spring and a balance wheel [1][2].
• A spherical wheel with an arch-shaped body outside the
sphere, similar to a mono-cycle robot [3].
• A hollow sphere with a small car [4] resting on the
bottom of the sphere. The concept is similar to having a
gerbil run inside a spherical plastic ball.
• A sphere with two side rotors, mutually perpendicular,
plus one rotor attached to the bottom of the sphere [5].
The change in angular velocities of these internal rotors
turning on themselves makes the robot move.
• A sphere with four inertial wheels [6][7] or masses that
move [8] over four axes in a tethrahedral structure.
• A sphere with motors attached to the side of the sphere
at the position of the rolling axis. A rotational mass [9]
or an actuated counterweight [10] [11] can be used to
steer the robot.
Surveys of ball-shaped and spherical robots are presented
in [2][4][12].
This work was supported in part by the Canada Research Chair (CRC),
the Natural Sciences and Engineering Research Council of Canada
(NSERC) and the Canadian Foundation for Innovation (CFI).
Jean-François Laplante and Patrice Masson are with the Department of
Mechanical Engineering of the Université de Sherbrooke, Québec
CANADA J1K 2R1 (e-mail: {Jean-Francois.Laplante,
Patrice.Masson}@USherbrooke.ca).
F. Michaud holds the Canada Research Chair in Mobile Robotics and
Intelligent Autonomous Systems. He is with the Department of Electrical
Engineering and Computer Engineering of the Université de Sherbrooke,
Québec CANADA J1K 2R1 (phone: 819-821-8000 x 62107; fax: 819 821-
7937; e-mail: [email protected]).
Fig. 1. First (left) and second (right) prototypes of Roball.
Our robot, named Roball [10][11][13][14], fits in the last
category. Roball is made of three rigid bodies: its spherical
outer shell, its internal structure holding the different internal
components of the robot (motors, microcontroller and
circuits), and its counterweight. We built two prototypes of
Roball: Roball-1 is made of a plastic sphere (bought in a pet
store) attached at the middle, and Roball-2 is designed to be
manufactured by thermoforming and was fabricated using
Rapid Prototyping in ABS (acrylonitrile-butadiene-styrene
copolymers) plastic. Shown in Fig. 1, both are about 6
inches in diameter. Propulsion motors are located on the side
of the internal structure, perpendicular (on the horizontal
plane) to the front heading of the robot and attached to the
extremities of the spherical shell. They move the center of
gravity of the robot forward or backward, for longitudinal
motion of the robot. The speed of the motors is regulated
according to longitudinal inclination of the internal structure,
keeping the center of gravity of the robot close to the
ground. Lateral motion is achieved using the battery as the
counterweight, mounted on a servo-motor. This allows the
robot to tilt on one side or the other as the shell rolls.
Since cost is an issue in designing a toy robot for child-
robot interaction [13], we used inexpensive sensors such as
tilt sensors (first prototype using two propulsion motors –
resolution approximately 30° over 160°) or custom-designed
inclinometers using small pendulums, wheel encoders and
photodetectors (second prototype using one propulsion
motor – resolution 10° over 360°) to provide control
measurement for velocity control of the robot’s motors. Such
increased range is required with Roball-2 because its
steering mechanism allows the robot to flip over from one
side to the other, over 250°, as shown in Fig. 2. Note that
with one of its side being flat (the other is the robot’s face),
Roball-2 can lie with its face facing upward, to facilitate
interaction with people.
Even though the six categories of spherical rolling robots
have implemented prototypes, not all have detailed
Analytical Longitudinal and Lateral Models of a Spherical Rolling
Robot
Jean-François Laplante, Patrice Masson and François Michaud
A

mathematical models of the robot’s motion capabilities. In
relation to other types of spherical rolling robots, only [3]
and [4] present models for longitudinal motion that can show
similarities with Roball, but following different locomotion
principles. For a spherical robot like Roball, to our
knowledge, no kinematic and dynamic models of
longitudinal or lateral motions have yet been developed. For
our work, advanced models would not be necessary to derive
a controller for the robot because of the low-precision
sensors used onboard. Simple models are desired to evaluate
the influence of the robot’s weight and diameter on its
motion.
Fig. 2. Roball-2 moving from one side to another, by moving its internal
counterweight. The middle picture illustrates how Roball-2 can lie face up.
In this paper, we present models that describe
mathematically the robot’s longitudinal and lateral motion
capabilities on flat surfaces, first described using
MATLAB/Simulink in Section II, and then validated using
SimMechanics and experimentally using Roball-2 as
reported in Section III.
II. MOTION MODELS
A. Longitudinal Motion
Let us start with a simplified model, only considering no-
slip longitudinal motion on flat surfaces. Fig. 3 illustrates the
simplified model with a side view of the robot. It represents
the spherical outer shell with its center of mass CMS and a
pendulum (composed of a massless link and a point mass at
its end) with center of mass CMQ and the axis attached at the
center of the sphere.
Fig. 3. Simplified model for longitudinal motion, side view of the robot.
Dynamic models can be derived for the pendulum and the
sphere using Newton-Euler method, summing the forces and
summing the moments. Fig. 4 illustrates the forces and
moments on each of the two rigid bodies. The sum of forces
on the pendulum expressed in relation to X and Y reference
frame is given by (1), with RX and RY the reacting forces at
the point of contact of the axis, rQ being the length of the
pendulum’s shaft, g is the gravitational acceleration, and ˙ ̇ x S
being the longitudinal acceleration of the sphere.
RX
RY
+ mQ
0
g
= mQ
˙ ̇ QrQ cos Q˙ Q
2rQ sin Q + ˙ ̇ x S˙ ̇ QrQ sin Q + ˙ Q
2rQ cos Q + 0
(1)
The sum of moments on the pendulum is presented by (2),
with C being the torque applied at the center of the sphere
and JQ the moment of inertia of the pendulum about an axis
perpendicular to the X-Y plane.
C mQrQgsin Q = JQ ˙ ̇ Q (2)
Fig. 4. Forces and moments for the pendulum (left) and the sphere (right).
The sum of forces and the sum of moments for the sphere
are given by (3) and (4) respectively, with f representing the
contact force, N the normal force with the ground, rS being
the radius of the sphere, JS the inertia of the sphere about an
axis perpendicular to the X-Y plane, and ˙ ̇ S the angular
acceleration of the sphere.
RX
RY
+ mS
0
g
+
f
N
= mS
˙ ̇ x S0
(3)
C + f rS = JS ˙ ̇ S (4)
The longitudinal acceleration of the sphere can be
expressed in terms of the angular acceleration of the sphere
according to (5).
˙ ̇ x S = ˙ ̇ SrS (5)
Fig. 5.
Q (left) and ˙ S (right) in relation to time using the non-linear
longitudinal model, with mS = 0.448 kg, rS = 0.0889 m, JS = 2.35x10-3 kg
m2, mQ = 0.5 kg, rQ = 0.0317 m, JQ = 5.025x10-4 kg m2.

Fig. 5 illustrates Q
and ˙ S with respect to time with a
step excitation of C = 0.01 Nm, using (1) to (5) is generated
in a MATLAB/Simulink simulation. The results indicate that
the system oscillates around a mean value of Q = 0.7 rad,
and such oscillations have an impact on the speed of the
sphere ˙ S .
In order to simulate Roball’s behavior, a model of its
propulsion actuator, i.e., a DC motor, must be derived.
Equations (6) and (7) present this model, with L the motor’s
inductance, R its resistance, kE the back electromotive force
(back-emf) constant, kM the torque constant constant, Z the
gear ratio, and i and e the current and applied voltage
respectively.
L˙ i + Ri + kE Z ˙ S ˙ Q( ) = e (6)
C = kM Zi (7)
Considering only the forces in the X axis and using these
seven equations, three non-linear equations are derived
expressing the longitudinal dynamic model of the robot.
Equation (8) is obtained by isolating RX in (1) and (3),
isolating f using (4) replacing ˙ ̇ x S by (5) and replacing C by
(7). Equation (9) is derived from replacing (7) in (2).
Equation (10) is derived directly from (6).
mQ (rQ ˙ ̇ Q cos Q rQ ˙ Q2 sin Q rS ˙ ̇ S ) +
kM Zi JS ˙ ̇ SrS
mSrS ˙ ̇ S = 0 (8)
JQ ˙ ̇ Q + mQrQgsin Q kM Zi = 0 (9)
L˙ i + Ri + kE Z ˙ S ˙ Q( ) e = 0 (10)
Using (8), (9) and (10), a linear model is expressed with
state variables of the form uBxAx +=& , with u equals to e,
is given by (11) and (12). The model is linearized at Q = 0
and ˙ Q = 0 .
˙ S˙ ̇ S˙ Q˙ ̇ Q˙ i
=
0 1 0 0 0
0 0mQ
2 rQ2rS g
G 0mQ rQ rS kM +kM ZJQ
G
0 0 0 1 0
0 0mQ rQ g
JQ0 kM Z
JQ
0 kE ZL 0 kE Z
LR
L
S
˙ S
Q
˙ Qi
+ e
0
0
0
01L
(11)
G = JQ mQrS2 + mSrS
2 + JS( ) (12)
Using the linear longitudinal model, we can demonstrate
that the system is controllable by state feedback [14] in order
to remove the oscillations shown in Fig. 5. However, with
Roball-2, to minimize the cost, we only have onboard
inclinometers installed on the robot, a small microcontroller
and no velocity sensors measuring the sphere’s speed of
rotation. It is therefore impossible to implement a complete
state-based control approach with Roball-2. The control
strategy is thus to assign a constant speed setpoint for the
sphere, and to use the angle Q
of Roball-2’s internal
structure measured by the inclinometer as the error signal.
At constant velocity and without considering friction,
Q 0 .
Fig. 6 illustrates the pole-zero map of the open-loop
transfer function of the system, derived using the linear
model given by (11). It shows an angular frequency of 3.85
rad/s and a damping of 0.089. For a unit step input, the gain
of the steady state response would be -0.8525.
Fig. 6. Pole-zero map (left) and unit step input (right) of the linear
longitudinal model, with kE = 3.3517x10-3 V/rad, kM = 2.130x10-3 N m/A.
Fig. 7. Effect of KBF on the pole-zero map.
In a closed-loop configuration, a proportional controller
with gain KBF can stabilize Q
around the desired position.
Fig. 7 shows the effect of KBF on the pole-zero map. As KBF
increases, the conjugated pole is moving away from the
imaginary axis while the real pole is moving closer, and
eventually the system becomes over-damped. KBF=0.126 is
the smallest gain for which the system remains over-damped
and stable. This results for a system with a rise time of 0.62
sec, no overshoot, a natural frequency of 4.2 rad/s and a
damping of 1, as shown in Fig. 8.
Fig. 8. Pole-zero map (left) and unit step input (right) of the linear
longitudinal model with KBF =0.126.
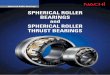
B. Lateral Motion
Lateral motion of Roball is achieved by changing the
angle of Roball-2’s counterweight B. The first interesting
aspect to model is how much the counterweight must be
inclined to create lateral motion of the robot when lying on
is side.
Fig. 9 illustrates the position of the center of mass of the
robot. To make the robot change direction, the minimal
angle B of the counterweight in relation to the internal
structure is given in (13). So, with l = 1.27 cm (the length of
the flat surface on Roball-2’s side), B must be at least
greater than 59° to make the robot change direction. A step
command with B = 59° will however cause oscillations, and
it would be preferable to use a ramp as a command for
steering.
Fig. 9. Lateral forces on the robot.
B = arcsin
mTOT l
2mBrB
(13)
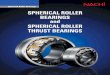
Fig. 10. Geometry of lateral motion (back view).
The other type of lateral motion that can be modeled is
circular motion. Fig. 10 illustrates the centers of mass, the
angles and the radius of the different rigid bodies of the
robot. When B T is small, sin( B T ) B T and
cos( B T ) 1. The coordinates of the center of mass of
the robot, xCM and yCM, are given by (14) and (15).
xCM =mB rB ( B T )
mTOT
(14)
yCM =(mP + mS ) rS + mB (rS rB )
mTOT
(15)
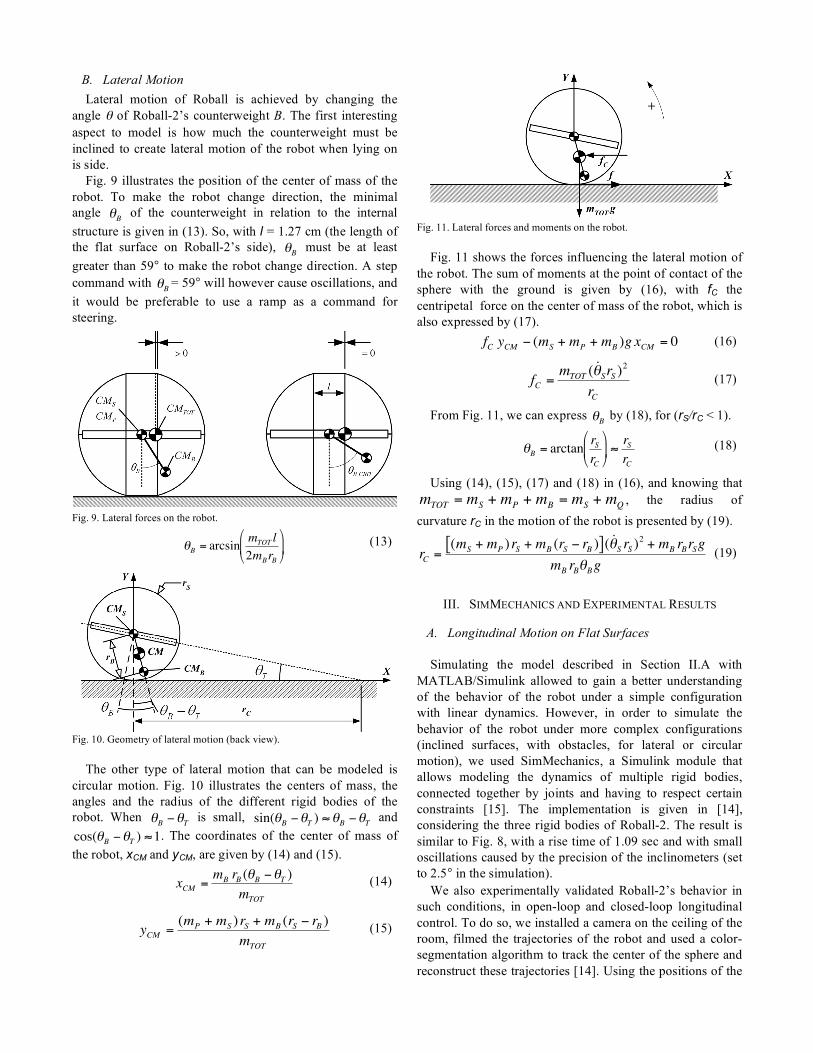
Fig. 11. Lateral forces and moments on the robot.
Fig. 11 shows the forces influencing the lateral motion of
the robot. The sum of moments at the point of contact of the
sphere with the ground is given by (16), with fC the
centripetal force on the center of mass of the robot, which is
also expressed by (17).
fC yCM (mS + mP + mB )g xCM = 0 (16)
fC =mTOT ( ˙ SrS )2
rC (17)
From Fig. 11, we can express B by (18), for (rS/rC < 1).
B = arctan
rSrC
rSrC
(18)
Using (14), (15), (17) and (18) in (16), and knowing that
mTOT = mS + mP + mB = mS + mQ , the radius of
curvature rC in the motion of the robot is presented by (19).
rC =(mS + mP ) rS + mB (rS rB )[ ]( ˙ S rS )2 + mB rBrSg
mB rB Bg (19)
III. SIMMECHANICS AND EXPERIMENTAL RESULTS
A. Longitudinal Motion on Flat Surfaces
Simulating the model described in Section II.A with
MATLAB/Simulink allowed to gain a better understanding
of the behavior of the robot under a simple configuration
with linear dynamics. However, in order to simulate the
behavior of the robot under more complex configurations
(inclined surfaces, with obstacles, for lateral or circular
motion), we used SimMechanics, a Simulink module that
allows modeling the dynamics of multiple rigid bodies,
connected together by joints and having to respect certain
constraints [15]. The implementation is given in [14],
considering the three rigid bodies of Roball-2. The result is
similar to Fig. 8, with a rise time of 1.09 sec and with small
oscillations caused by the precision of the inclinometers (set
to 2.5° in the simulation).
We also experimentally validated Roball-2’s behavior in
such conditions, in open-loop and closed-loop longitudinal
control. To do so, we installed a camera on the ceiling of the
room, filmed the trajectories of the robot and used a color-
segmentation algorithm to track the center of the sphere and
reconstruct these trajectories [14]. Using the positions of the

robot as a function of time, the velocity of the sphere can be
derived. Fig. 12 shows all of the results obtained with a
velocity setpoint of 4 rad/s with Roball-2 and with
SimMechanics. Compared to the simulation, more
oscillations occur with the real robot. This is caused by the
fact that the resolution of the inclinometer used on the robot
is 10°. To avoid inadequate behavior, inclinometer data
between ±10° are set to 0. This limitation causes oscillations
but, despite that, the closed-loop control allows reducing by
60% the oscillations in the angular speed of the robot,
compared to the open-loop configuration.
Fig. 12. Unit step input of Roball in open and closed loops with KBF =0.126
using SimMechanics.
B. Lateral Motion
Fig. 13 shows results obtained using this model for
different rotational velocities ˙ S . The round dots represent
results obtained using SimMechanics for ( ˙ S , B ) = (2 rad/s,
9°) and for ( ˙ S , B ) = (4 rad/s, 24°). MATLAB/Simulink
simulation results are shown for 2 rad/s, 3 rad/s and 4 rad/s.
Fig. 13. Radius of curvature in relation to the angle of the counterweight,
for different rotational velocities of the sphere.
Fig. 14. Circular trajectories made by Roball at ( ˙ S ,
B) = (3 rad/s, 45°).
Using the ceiling camera setup, we validated some of
these results using Roball-2 at ˙ S =3 rad/s and B set to 15°,
30° and 45°. Fig. 14 illustrates one trial. It is worth noticing
that the center of the circular trajectories moves as the robot
turn. This is caused by low-resolution readings of the
inclinometer (used in a PI controller of the angle of the
counterweight), unbalanced masses in the robot and small
inclination of the floor. Considering each complete circle
made by the robot and averaging the radius of curvature,
results in Fig. 13 shows good similarities between the
mathematical model and the trajectories of the real robot.
Finally, changing the setpoint for B over time allows
creating interesting trajectories like a spiral or an 8-figure, as
shown from simulation in Fig. 15. Such trajectories were
reproduced with Roball-2, but with less precision because of
the limitations of its onboard sensors. However, such sensors
are sufficient for generating interesting trajectories that will
keep children engaged in interacting with the robot.
Fig. 15. Spiral (top) and 8-figure (bottom) trajectories with ˙ S = 3 rad/s over
a 2m 2m area. The assigned setpoints for B
over time are shown on the
left, and on the right top views of the trajectories made by the robot are
shown.

IV. CONCLUSION
Manufacturing custom spherical shelves is expensive,
and being capable of anticipating the influence of the robotic
components’ weights and size before fabricating the robot
would be quite helpful. Spherical robots have complex
dynamics, and being able to simulate their behavior would
be quite valuable in the design process.
In this paper, we have presented non-linear and linear
models of longitudinal and lateral motions of a spherical
rolling robot that applies a torque at the rolling axis and can
control the position of a counterweight for steering.
Experimental trials done using Roball-2 confirm the validity
of the models, considering the resolution of its onboard
sensors.
Future work involves the design of new prototypes of
Roball of different sizes and weights, making the shell as
robust and light as possible, and to use these prototypes to
study infant-robot interaction [13]. As of now, Roball’s
prototypes were designed without any use of models to set
its size, weight, radius of the flat surface of its side, etc. The
models described in this paper will be useful in helping
evaluate the motion capabilities of different versions of
Roball before going into fabrication.
ACKNOWLEDGMENT
The authors want to acknowledge the contributions of
Serge Caron and Dominic Létourneau in building Roball’s
second prototype. Special thanks to Michel Lauria for his
helpful comments in reviewing this paper.
REFERENCES
[1] S. Halme, T. Schönberg, and Y. Wang, “Motion control of a spherical
mobile robot,” in Proc. Int. Workshop on Advanced Motion Control, Japan, 1996.
[2] K. Husay, Instrumentation of a Spherical Mobile Robot, Master’s
Thesis, Department of Engineering Cybernetics, Trondheim
06.08.2003, 2003.
[3] A. Koshiyama and K. Yamafuji, “Design and control of an all-
direction steering type mobile robot,” The International Journal of Robotics Research, vol. 12, no. 5, pp. 411-419, 1993.
[4] A. Bicchi, A. Balluchi, D. Prattichizzo, A. Gorelli, “Introducing the
Sphericle: An experimental testbed for research and teaching in non-
holonomy,” in Proc. IEEE Int. Conf. on Robotics and Automation,
1997.
[5] S. Bhattacharya and S. K. Agrawal, “Spherical rolling robot: A design
and motion planning studies,” IEEE Transactions on Robotics and Automation, vol. 16, no. 6, pp. 835-839, 2000.
[6] R. Mukherjee and M. Minor, “A simple motion planner for a spherical
mobile robot,”, in Proc. IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 896-877, 1999.
[7] R. Mukherjee and T. Das, “Feedback stabilization of a spherical
mobile robot,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2154-2162, 2002.
[8] A. Javadi and P. Mojabi, “Introducing August: A novel strategy for an
omnidirectional spherical rolling robot,” in Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3527-3533, 2002.
[9] B. Chemel, E. Mustcheler, and H. Schempf, “Cyclops: Miniature
robotic reconnaissance system,” in Proc. IEEE Int. Conf. on Robotics and Automation, 1999.
[10] F. Michaud and S. Caron, “Roball, the rolling robot,” Autonomous Robots, vol. 2, no. 12, pp. 211-222, 2002.
[11] F. Michaud and S. Caron, “Roball – the rolling robot (Patent style),”
U.S. Patent #6,227,933, May 8, 2001.
[12] J. Suomela and T. Ylikorpi, “Ball-shaped robots: An historical
overview and recent development at TKK,” Field and Service Robots, STAR 25, pp. 343-354, 2006.
[13] J.-F. Laplante, F. Michaud, H. Larouche, A. Duquette, S. Caron, D.
Létourneau, P. Masson, “Autonomous spherical mobile robot to study
child development,” IEEE Trans. on Systems, Man, and Cybernetics, Part A, vol. 35, no. 4, pp. 471-480, 2005.
[14] J.-F. Laplante, Étude de la dynamique d’un robot sphérique et de son effet sur l’attention et la mobilité de jeunes enfants, Masters thesis,
Department of Mechanical Engineering, Université de Sherbrooke,
Sherbrooke, Québec Canada, 2004.
[15] G. D. Woods, “Simulating mechanical systems in Simulink with
SimMechanics,” The MathWorks inc., 2003.