Embed Size (px)
Citation preview

ANALYTIC SOLUTIONS TO THE LOTKA-VOLTERRAMODEL FOR SUSTAINED CHEMICAL OSCILLATIONS†
C. M. Evansa,b and G. L. Findleyb,*
aCenter for Advanced Microstructures and Devices (CAMD) and Departmentof Chemistry, Louisiana State University, Baton Rouge, LA 70803
bDepartment of Chemistry, University of Louisiana at Monroe, Monroe, LA 71209
†This work was originally submitted by C. M. Evans to the faculty of the University of Louisiana at Monroe in partialfulfillment of the requirements for the degree of Master of Science in Chemistry.
*Corresponding author: email [email protected], tel. (318) 342-1835, fax (318) 342-1859.
ABSTRACT
The Lotka-Volterra (LV) model of oscillating chemicalreactions, characterized by the rate equations
has been an active area of research since it was originallyposed in the 1920s. In this Review, we present a simpletransformation which reduces the two-dimensional LVsystem to a one-dimensional system modeled by asecond-order nonlinear autonomous ordinary differentialequation. The formal analytic solutions to the LVproblem are then derived for the first time. Anintroductory analysis of these solutions is given whichleads to the development of an LV-related family ofdynamical systems. Analytic solutions to this family ofdifferential equations are presented, for certain cases, interms of known functions that exhibit oscillatorybehavior. The Hamiltonian nature of both the LV modeland the related family of differential equations isdeveloped, and future extensions of this treatment arediscussed.
1. INTRODUCTION
In this Review, we present analytic solutions to theLotka-Volterra (LV) model for sustained chemicaloscillations. During the analysis of these solutions, afamily of LV-related nonlinear autonomous ordinarydifferential equations, all of which can be solved
analytically (some in terms of known functions) aredeveloped. The Hamiltonian forms of both the LV modeland its related family are explored in order to gain moreinsight into the nature of dynamical systems whichpossess invariants.
An oscillating chemical system is one in which somemacroscopic feature of the system undergoes periodictemporal or spatial variations. (The LV system, forexample, exhibits sustained oscillations in time.) Inrecent years, an increasing amount of attention has beenpaid to oscillating chemical reactions because of thediscovery of oscillatory homogeneous biochemical andinorganic systems [1,2].
Although much research has been done on the natureof oscillating systems, such as the study by Prigogine andco-workers on the thermodynamic and kineticrequirements for the existence of oscillations [3,4], littleis known analytically about such systems. This lack ofknowledge is a result of the complexity of the differentialmodels used. Thus, the development of a systematictechnique for the solution of a set of n nonlinear first-order differential equations could lead to new insightsinto the nature of conservative systems which possesssustained oscillations. Because of the highly nonlinearnature of the differential equations used to modelchemical oscillators [5,6], much of the current researchhas been aimed at analyzing the qualitative behavior ofthe rate laws (e.g., [7]). The qualitative properties ofdifferential equations, including the requirements for asystem to be considered conservative, will be discussed inmore detail in Part 2, and applied throughout theremainder of this work. In Part 3, reaction schemes used

(2.4)
(2.1)
(2.2)
(2.3)
to model some common chemical oscillators will bedescribed, and the phenomenological rate laws will bedeveloped.
In Part 4, we present a method which allows a two-dimensional nonlinear conservative system, namely theLV model, to be reduced to a one-dimensional systemmodeled by a second-order nonlinear ordinary differentialequation. (The generalization of this method to systemswith dimensionality greater than 2 is briefly discussed inPart 6.) The main reasons for the choice of the LV modelfor our study are that it is the simplest known model of atwo-component system which exhibits sustainedoscillations, and it has wide applicability in many fields.The analytic solution to the LV model, which is presentedin Part 4, has a doubly periodic nature which implies thatit represents a new type of elliptic function. Anintroductory analysis of this function is presented in Part5 in terms of the analytic solutions to a LV-related familyof differential equations. This family, which appearsinitially to be more complicated than the LV model, iscapable in some cases of being solved analytically interms of known functions, with the solutions representingapproximations to the solution of the LV system.
The Hamiltonian form of the LV model isinvestigated in Part 4, leading to the definition of a newHamiltonian in a four-dimensional phase space. A briefdiscussion of the further extension of this Hamiltonian ton-dimensional systems is presented in Part 6. The LV-related family of differential equations is also shown topossess a Hamiltonian, although the function constructedis not a traditional Hamiltonian.
2. DYNAMICAL SYSTEMS
A. Qualitative Properties of Dynamical Systems
A dynamical system, by which any homogeneouschemical reaction is modeled [8-10], consists of a set offirst-order ordinary differential equations. In this Section,we present a review of the qualitative properties of suchsystems. (A qualitative property, such as stability, of adynamical system is one which may be determinedwithout explicitly solving the system.) The mathematicalresults presented here will be used throughout theremainder of this work.
Consider a system of first-order ordinary differentialequations (ODEs) represented by
where . By allowing x1, ..., xn to be com-ponents of a n-dimensional vector x, eq. (2.1) can be
written as
where f(t,x) is a vector-valued function. In order to bewell defined, eq. (2.2) requires that the function f becontinuous in both the one-dimensional real Euclideanspace of the scalar (t 0 ú) and the n-dimensional realEuclidean space of the vector (x 0 ún). The function fmaps an open subset G of ún+1 to ún, which can bewritten symbolically as f:G6ún where G d ún+1 [11,12].
A solution to eq. (2.2) is a function N(t) which isdefined on an interval I of the t-axis (Idú), such thatN:I6ún is continuously differentiable and N(t) satisfieseq. (2.2) [12]. The solution of eq. (2.2) is the curve 'lying in region G, where each point of the curve has thecoordinates (t,N(t)), and where the tangent to ' at eachpoint is represented by f(t,N(t)) [11].
One of the most important conditions that f(t,x) mustsatisfy is the Lipschitz condition for continuousdifferentiability. The condition for a function to beLipschitz continuous in the neighborhood of a certainpoint p0 is that
where L is a constant and 2r2 is the Euclidean length(norm) of the vector given by
and where x, x! belong to a bounded domain Dd ún
[13,14]. The neighborhood of a point p0 defined by thecoordinates (t0,x0) in ún+1 [p0 := (t0,x0)0ún+1] is the set ofpoints N(t0,x0) satisfying the conditions that for every(t,x), , t - t0 , < J and 2x - x02 < D, where J and D arepositive constants. A boundary point of G is defined asthe point (t0,x0) in ún+1 such that every neighborhood of(t0,x0) contains both points in G and points outside of G.The set G d ún+1 is open if and only if it contains none ofits boundary points, and is closed if it contains all of itsboundary points [11].
The requirement of Lipschitz continuity in theneighborhood of the point p0 implies that there exists aunique solution to the initial value problem, namely, theproblem of finding a solution to eq. (2.2) which satisfiesthe condition N(t0) = x0 [12-14]. This existence-uniqueness theorem may also be stated as follows: thereexists one and only one solution x = N(t,p0) of eq. (2.2)which satisfies the initial condition N(t0,p0) = x0 if f(t,x)and its first partial derivatives Mf/Mxi are continuous in Gd ún+1. Thus, each solution N(t,p0) exists and is

(2.5)
Fig. 1. Example of a trajectory which shows Lyapunov stability.
continuous on some interval I d ú containing t0, andevery solution is continuous with respect to variations inthe values of the initial condition p0 [11,15].
If eq. (2.2) is autonomous, f is not an explicit functionof time:
This is a special case of eq. (2.2), where the domain of fis some real n-dimensional region (G d ún) instead of an(n+1)-dimensional region. Throughout the remainder ofthis discussion, f(x) and its first partial derivatives will beassumed to be continuous so that the existence-uniqueness theorem discussed above applies. If, for aidof visualization, we assume that eq. (2.5) governs themotion of a physical system, then the components of xmay be viewed as the generalized coordinates for thesystem. This set of coordinates, {xi , i = 1,…,n},constitutes the configuration space for the system. Thesolution curves for this system, referred to as trajectoriesor orbits, represent the history of the positional variationsof the system, since the position x of the system at anygiven time will lie on one of these trajectories [13]. Thetrajectory that the position x moves along as timeadvances is determined by the initial conditions chosenfor the system.
The velocity of the point x at any given time along thetrajectory is the tangent vector to the point [i.e., eq. (2.5)].Thus the solution to eq. (2.5) can be viewed as a pointmoving along a curve in an n-dimensional space with aposition dependent velocity given by eq. (2.5). (Byconvention, the orientation of trajectories is in thedirection of increasing time.) A trajectory which passesthrough the initial point x0 0 ún represents an infinite setof solutions {N(t+c,x0) , c 0 ú} which differ from eachother in phase. The invariance of the solutions ofautonomous systems to translations of the independentvariable t can be shown as follows.
If "(t) = N(t,x0) is a solution to eq. (2.5) on theinterval (a,b), then $(t) = N(t-c,x0) is a solution on theinterval (a - c, b - c), where c is any real constant. Sincefor every J 0 (a,b), "(J) = $(J - c), "(J) and $(J) defineidentical trajectories in configuration space [11]. Thus,the solutions of eq. (2.5) are invariant to translations intime.
The solution "(t) = N(t,x0) of eq. (2.5) is periodic withperiod T if there exists some real finite positive number Tsuch that "(t + T) = "(t) œ t 0 ú (excluding the trivialcase of "(t) = constant). A system has periodic solutionsif and only if it possess trajectories which are closedcurves [16]. (Let ( be a closed curve that solves eq. (2.5)and is defined by " œ t 0 ú. Since ( is closed, thereexists a time t1 and a number T > 0 such that "(t1)="(t1 +
T). Therefore " is periodic [11,17].)A point xc 0 G is a critical point of a system (which
physically corresponds to a stationary or equilibrium stateof a system) if f(xc) = 0. If a solution of eq. (2.5)generates a trajectory ( which passes through at least onepoint with a non-zero velocity, then ( cannot passthrough a critical point in finite time [13,16]. Thebehavior of trajectories in a sufficiently smallneighborhood around the critical point determines thenature or stability of the critical point xc. A critical pointxc is Lyapunov stable [12], usually referred to as stable, iffor all g > 0, there exists some *(g) > 0 such that for anysolution N(t,x0) of eq. (2.5),
A stronger condition for stability is that there exist some* > 0 such that
A critical point which satisfies this condition for stabilityis said to be asymptotically stable [13]. A critical pointwhich does not meet any of the criteria for stability is saidto be unstable.
To develop a better understanding of stability, let us consider the two-dimensional autonomous system where
x:=(x1,x2) and f(x):=(f1(x), f2(x)), and investigate thegeometric implications of stability for this system. In atwo-dimensional system, the neighborhood of a point isa circle centered about that point with some radius D > 0,which will be referred to as the D-neighborhood of thepoint. For a critical point to be stable, there must exist asufficiently small *-neighborhood N(*) of xc contained inany g-neighborhood N(g) of xc such that every trajectorywhich passes through N(*) at some time t = t0, remains in

Fig. 3. Example of a trajectory which is unstable.
Fig. 2. Example of a trajectory which is asymptotically stable.
(2.6)
(2.7)
(2.9)
(2.10)
N(g) for all future times [12,17] (see Fig. 1). The criticalpoint is asymptotically stable if there exists a sufficientlysmall N(*) of xc such that every trajectory which passesthrough N(*) at some time t = t0 approaches the criticalpoint as t approaches infinity (see Fig. 2). All criticalpoints which are asymptotically stable are also Lyapunovstable; however, the converse is not true. For a criticalpoint to be unstable, a trajectory must exist which passesthrough N(*) but does not remain in N(g) (see Fig. 3).
The stability of critical points is important in theanalysis of physical systems since, for example, anequilibrium state of a chemical system corresponds to anasymptotically stable critical point. Thus, if a system isperturbed from its equilibrium point by a small amount,the system will return to the equilibrium point in asufficiently long period of time. This is an example of LeChâtelier’s Principle.
B. Conservative Systems
A conservative system is defined as a system given byeq. (2.5) which possesses at least one first integral on aregion R d G. A first integral is a differentiable functionF(x) on R such that for any solution x = N(t,x0) 0 ú of eq.(2.5),
such that x = N(t,x0) 0 ú. (The trivial case of Fidentically constant is excluded.) The integralrepresented in eq. (2.6) defines a family of (n-1)-dimensional surfaces, referred to as level surfaces, onwhich each trajectory lies [11]. A trajectory lies on alevel surface Ls if that trajectory touches the surface at atleast one point. This can be seen by allowing F to be anintegral on R d G and defining the level surface Ls = {x, F(x) = C} where C is some constant. Let N(t,x0) 0 ú bea solution of eq. (2.5) on the interval J, œ t 0 J. Then forsome t1 0 J, N(t1,x0) = x1 0 Ls implies that N will define atrajectory ( which touches Ls at the point x1 0 ú. Thecondition that x1 0 Ls implies that
but since F is an integral of R by hypothesis, the aboverelationship must hold for all t 0 J. This allows eq. (2.7)to be written as
which implies that F is equal to a constant on every pointof the trajectory (. Thus, every point of ( is an elementof Ls, implying that the trajectory must lie completely onthe level surface Ls. An integral, therefore, represents aspecial constraint on the system of equations whichreduces the dimensionality of the system by one. (Inclassical mechanics, general constraints are referred to asholonomic when the variable x represents spatialcoordinates [18].) Since for a two-dimensional system(n=2) the level surfaces reduce to trajectories [16], thetrajectories of a conservative two-dimensionalautonomous system are completely defined by a singleintegral.
In order to illustrate this, let us consider the twodimensional system
where fi and Mfi/Mxj (i,j = 1,2) are continuous in someregion D d ú2. Eq. (2.9) implies that
which is an exact differential if there exists a function Fsuch that

(2.15)
(2.14)
(2.11)
(2.12)
(2.13)
where 8 is a function of x1 and x2 which insures that
If an integrating factor 8 can be found such that thesolution to eq. (2.12) holds for every point (x1,x2) 0 D,then
where C is a constant, thus defining a conservativesystem.
Eq. (2.13) defines a family of curves, with each curvecorresponding to a different value of C as determined bythe initial conditions, which fills the (x1,x2) plane. Sincethese curves are the trajectories of eq. (2.9), and since theexistence-uniqueness theorem implies that one and onlyone trajectory passes through every point in the plane, theexistence of a first integral for a two-dimensional systemenables one to find all of the trajectories which solve thesystem. In other words, the existence of a first integral, orinvariant, reduces the dimensionality of the system byone.
In general, an n-dimensional system is completelyintegrable if a set of n-1 independent integrals for eq.(2.5) can be found [19]. Because of this, the implicitsolution of eq. (2.5) is often written as
A set of integrals is independent if no integral of the setis derivable from the other integrals of the set or, in otherwords, if there does not exist a function having the formN(F1,…,Fn-1) = 0, where Fi are the integrals. Theindependence of a set of integrals is determined by theexistence of a nonzero functional determinant or Jacobian[20],
If this condition is satisfied, the variables xi, œ i = 2,…,n,can be expressed as unique, continuous, differentiablefunctions of the one independent variable x1 [19]:
As a final note, conservative systems cannot possessasymptotically stable singular points [13]. This can beillustrated by defining an invariant F for eq. (2.9) andletting F(x1
c,x2c) = C0, where C0 is a known constant. The
condition for (x1c, x2
c) to be an asymptotically stable pointis that every trajectory in a sufficiently smallneighborhood of the critical point approaches this point ast 6 4. But, by hypothesis, F is an invariant, implying thatF is a constant on every trajectory in the (x1,x2) plane. If( is a trajectory which approaches the point (x1
c,x2c) as t
6 4, and F(x1,x2) = C1 along every point of (, then
Since every trajectory in a sufficiently smallneighborhood approaches the point (x1
c,x2c) as t 6 4, F
attains the value of C0 for every trajectory in some smallregion R about the point (x1
c,x2c). This contradicts the
hypothesis that F is invariant, since the value of F shouldchange for each trajectory. Although the previousargument is for a two-dimensional system, similararguments can be applied to systems with higherdimensionality.
The fact that no conservative system can possess anasymptotically stable critical or equilibrium point hasmany implications for oscillating chemical reactions. Themajor implication is that oscillating chemical systemsoccur far from equilibrium. On the other hand, somesystems which possess asymptotically stable points inconfiguration space may possess invariants in the reactioncoordinate space, which is a space defined not only by theposition but also by the velocity [11]. These systems maybe completely specified by a reaction Hamiltonian, whichis a conservative integral of the motion. The next Sectionwill discuss the nature of conservative integrals whichpossess Hamiltonian structure, and how these integralscan be used to determine the phase-space trajectories ofa system.
C. The Hamiltonian
Although the Hamiltonian approach to dynamicalsystems adds nothing new to the physical nature of theproblem, it does allow for the development of new andmore powerful approaches to working with physicalproperties of the system which have already beenestablished. The Hamiltonian can be developed eitherfrom the properties of work done on a conservativephysical system, or from a variational calculus approachapplied to Hamilton’s principle [22]. The latter approachwill be presented in this Section.
For a 2n-dimensional dynamical system which can bewritten in the form

(2.17)
(2.19)
(2.16) (2.20)
(2.22)
(2.18)
(2.23)
(2.21)
where a is a proportionality constant, the components ofthe vector x 0 ún are the coordinates of the system, andthe components of the vector y 0 ún are the momenta ofthe system. The 2n-dimensional real Euclidean space inwhich the solution curves to eq. (2.16) lie will be referredto as the phase space of the system, with the n-dimensional spaces in which the solution curves of = ay and = g(x,y) lie being referred to as configurationspace and momentum space, respectively. For con-venience, the proportionality constant a, which in amechanical system would be related inversely to mass,will be assumed to be one. The velocity of the systemrepresented by eq. (2.16) is and the acceleration is .Kinetic energy is the energy that the system possesses asa result of the motion of the system, and is classicallydefined as
The potential energy V is the energy that a systempossesses as a result of the configuration of the system.(A system which is subject to dissipative forces can havea potential linearly dependent on the velocity; in general,forces in a conservative system are derivable from thenegative gradient of the potential energy.)
One immediate result of eq. (2.16) is
implying that any 2n-dimensional system having the formof eq. (2.16) can be written as a n-dimensional system ofsecond-order autonomous differential equations. Theconverse of this argument is also true. In general, a setof n mth order differential equations can be expressed asa set of mn first-order differential equations [13]. Thus,any second-order differential equation can be viewed asa system which models a fictitious particle with a positionand momentum defined by eq. (2.16).
Hamilton’s principle [21] states that out of allpossible paths along which a dynamical system maytravel from one point to another in a specific amount oftime, the actual path followed is the one which minimizesthe time integral of the difference between the kinetic andpotential energies. Hamilton’s principle can besummarized by stating that the action integral,
where L = T - V, is constant for the actual path of motion.Thus, the variation [22] of eq. (2.19) is
which is a sufficient condition for deriving the equationsof motion for a dynamical system having the form of eq.(2.16) [18]. The function L(x, ) is termed theLagrangian of the system.
The variation of I is obtained by considering I as afunction of some parameter " which labels a set of curvesxi(t,") such that
where xi (t,0) are the solutions to the extremum problem(to be obtained), and 0i are independent functions of twhich vanish at the end points and are continuous upthrough second derivatives (C2) [18,22]. With the use ofeq. (2.21), eq. (2.20) becomes
which can be integrated by parts to give
Since all curves pass through the fixed end points,implying
eq. (2.22) reduces to
where

(2.24)
(2.25)
(2.26)
(2.29)
(2.30)
(2.27)
(2.28)
The fundamental lemma from variational calculus [22]states that if
for any arbitrary function 0(x) 0 C2, then M(x) mustvanish identically in the interval (x(1),x(2)). Applying thislemma to eq. (2.23) gives
This system of equations [eq. (2.24)] is referred to asLagrange’s equations and is equivalent to the originalequations of motion [eq. (2.16)]. Thus, the dynamicalsystem is now defined by a Lagrangian,
which satisfies Lagrange’s equations [eq. (2.24)]. Theconjugate momentum is now given by
which reduces to the form of eq. (2.16) if the system doesnot have a velocity-dependent potential. The transitionfrom a Lagrangian formulation to a Hamiltonianformulation is mathematically equivalent to a coordinatetransformation from (x, ) to (x,y). This switch incoordinates is accomplished by performing a Legendretransformation on the Lagrangian.
A Legendre transformation, in general, concerns afunction f of two variables (x,y) which has a totaldifferential given by
In order to change the coordinates from (x,y) to (u,y), withthe differential quantities expressed in terms of du and dy,a new function g is defined such that
Direct differentiation of g gives
which, upon substituting in the relationship for df, reducesto
By direct comparison of the last equation to the totaldifferential of g, the functional form of x and v mustsatisfy the relationships
and
Applying this transformation to eq. (2.25) gives theHamiltonian as
which, if the potential is linear in the velocity, reduces to
where
and
The Hamiltonian, which is the sum of the potential andkinetic energy of a system, represents the total energy.Eq. (2.28) are Hamilton’s equations, which completelydefine the motion of the system. It is important to notethat not all systems of first-order autonomous differentialequations can be placed into Hamiltonian form, althoughall conservative systems should possess a transformationwhich allows the equations to be placed into a formwhich solve Hamilton’s equations. If a system can beplaced into a form which solves Hamilton’s equations,and if
where i … j, the system possesses a Hamiltonian.The invariance of the Hamiltonian is easily shown for
a system with a velocity- independent potential by a directtime differentiation of eq. (2.27). When the potential isvelocity independent, eq. (2.27) reduces to
which has the time derivative
Using eq. (2.26) and Hamilton’s equations [eq. (2.28)],reduces eq. (2.30) to

(2.31)
(3.1)
(3.2)
(3.3)
(3.4)
(3.5)
Since H represents an invariant, similar to theinvariants discussed in the previous Section, it defines afamily of curves in the phase plane which are the possibletrajectories of the particle. The particular trajectory of theparticle is determined as soon as the initial position andmomentum of the particle are specified.
Although the form of the potential V(x) has not beengiven, several qualitative properties of the trajectories canbe determined from eq. (2.29). Since H is quadratic in yand y 0 ún, H(x,y) = H(x,-y), which implies that thetrajectories will be symmetric with respect to reflectionacross the x-axis. Furthermore, since T > 0, the potentialmust be less than or equal to the total energy of thesystem, thus confining the trajectories to that region ofphase space.
The equilibrium points for a Hamiltonian system [i.e.,a system solving eq. (2.28)] are y = 0 and dV/dx = -g(x) =0. This implies that the singular points of eq. (2.16), orequivalently eq. (2.28), lie on the x-axis and must be at apoint where the potential energy is an extremum. If thepotential energy attains a maximum at the singular point,the singular point is unstable; if the potential is at aminimum, the singular point will be stable [13,17].
The existence of a Hamiltonian for a given dynamicalsystem can be used to discover the other constants of themotion, since the Poisson bracket of the Hamiltonian witha function N(x,y) is the time derivative of N. The Poissonbracket of H with N is defined by
Later in this Review, a new approach to obtainingHamiltonians for the Lotka-Volterra model will bepresented. Also, the existence of a Hamiltonian structurefor a family of nonlinear differential equations related tothe Lotka-Volterra model will be shown. The ability towrite a Hamiltonian for a dynamical system allows theapplication of new techniques, such as Hamilton-Jacobitheory [18], in an attempt to develop analytic solutions.
3. THE DYNAMICS OF CHEMICAL SYSTEMS
A. Introduction
The dynamics of chemical systems (i.e., chemicalkinetics) is the study of the mechanism and rate oftransformation of one set of compounds (the reactants)
into another set (the products). As mentioned in Part 2,the rate of reaction of a system is modeled by a set offirst-order autonomous differential equations [10], whichare referred to as the rate laws. Recall from the previousSection that the variables xi 0 ún, œ i = 1,…,n, weretaken to be the generalized coordinates of a systemmodeled by a set of n first-order differential equations,and that the vector x in configuration space completelyspecified the state of the system at a given time. Thegeneralized coordinates xi of the dynamical system [eq.(2.5)] can be interpreted as composite variables of theamount of the chemical components in a system and arethen referred to as reaction coordinates.
The reaction coordinates for a system are definedchemically as follows. The total mass of a system of rcomponents at any given time can be written
where m"(t) is the mass of the "th component at time t.The change of the "th component can be expressed as
where dIm" and dEm" are the (differential) mass changesof the "th component resulting from reactions within thesystem, and from mass transfer with the exterior,respectively. The conservation of mass during a reactionimplies that
and, therefore, that
The differential reaction coordinate for a chemical systemis defined by
where dni" is the change in the number of moles of the"th component due to the ith reaction, and <i" is thestoichiometric coefficient of the "th component in the ithreaction [11]. (By convention, the sign of <i" is positiveif the component is a product and negative if it is areactant.) Converting to moles and substituting eqs. (3.2)and (3.4) into eq. (3.1) gives

(3.6)
(3.7)
(3.9)
(3.10)
(3.11)
(3.8)
If dEn" = 0 for some component $, then eq. (3.5) can beintegrated to give
which, if the component xj only appears in the ithreaction, reduces to
When the change in volume during the course of thereaction is negligible, this reaction coordinate [eq. (3.6)]can be expressed in terms of the molar concentrations ofthe components.
Chemical reactions are classified by how eqs. (3.2)and (3.3) are related, the type of mechanism followed, andthe order of the system. An open chemical reaction is areaction where some of the components gain or lose massby interaction with sources external to the system (dEm …0). If the mass of some of the components in the reactionis maintained constant via interactions with an externalreservoir, while the remaining components undergo masschanges due only to reactions within the system, thereaction is said to be simply open. In this case,
A system is closed if the total change in mass is zero,implying that the mass of the system is conserved duringthe course of the reaction. In most kinetic studies, onlysimply open or closed systems are considered.
The general mechanisms which are used to constructa model for a chemical system are either reversible orirreversible simple chemical reactions, or autocatalyticchemical reactions. A simple chemical reaction is aclosed single step reaction having the form
where k1 and k1! are rate constants, which are independentof the concentrations of the components but dependent ontemperature [23]. If k1! = 0, the reaction is irreversible;otherwise it is classified as a reversible reaction. Theorder of a system refers to the highest power to which theconcentrations of the components are raised (e.g., asecond-order reaction will have at least one quadraticterm) in the rate law. When a single-step reaction creates,as a product, one of the reactants, such that the totalconcentration of that reactant is constant for the reaction,the reaction is said to be autocatalytic. An oscillatingchemical system is a complicated system modeled by a
combination of simple and autocatalytic reactions with atleast one autocatalytic reaction, since an autocatalytic stepis a necessary condition for chemical oscillations to exist[3,4].
The solutions to the rate laws, usually referred to asintegrated rate laws, give the concentrations of thechemical components of a system as functions of time,thus allowing for predictions of the amount of a specificcompound in the reaction vessel at any given time. Twoapproaches for obtaining these solutions are thephenomenological approach [10,23] and the Hamiltonianapproach [11,24-26], with the latter being a simplemathematical extension of the former. Thephenomenological approach to chemical kinetics involveswriting the rate law for each reaction in terms of onecomponent for that reaction and solving the resultingsystem of differential equations. This approach canbecome complicated even for systems containing a smallnumber of chemical reactions. The Hamiltonian approachdevelops a set of reaction coordinates and their conjugatemomenta, and uses these to write a reaction Hamiltonianfor the system. Once a reaction Hamiltonian is defined,powerful solution techniques, such as Hamilton-Jacobitheory, can be applied in order to obtain analyticsolutions.
The reaction Hamiltonian for a system can inprinciple be derived as follows. Let a system of nchemical reactions possess the set of n corresponding rateequations
where x = (x1,…,xn) and f(x) = (f1(x),…,fn(x)). The secondtime derivative of eq. (3.8) is
which, using the same line of reasoning as that presentedin Part 2, can be expressed as a set of 2n first-orderdifferential equations
thus defining the reaction coordinates x and the reactionmomenta y of the system. If the system possesses apotential V(x) such that
then a reaction Hamiltonian, defined by
exists. The existence of a Hamiltonian guarantees that

(3.12)
(3.13)
(3.14)
(3.15)
(3.17)
the dynamical behavior of the system will be described byeq. (2.28), and that the solutions to the system will defineclosed curves in the reaction phase space. The particularphase space trajectory of the system is fixed by thespecification of a set of 2n initial conditions. Both thephenomenological and the Hamiltonian approaches to thesolution of the rate laws of simple and autocatalyticreactions will be presented in the following sections. Theformalism developed will then be used to set up thedynamical equations for the complex systems of somecommon chemical oscillators.
B. Simple Chemical Reactions
As mentioned in the previous section, a simplechemical reaction is a closed or simply open single-stepreaction having the form [eq. (3.7)]
where the forward reaction is of order r and the reversereaction is of order s-r. Processes which are modeled bysimple chemical reactions include radioactive decay,absorption and emission of electromagnetic radiation, andsome formation and degradation reactions.
For an irreversible reaction (k1! = 0), the phenomeno-logical rate law is
where n"(0) is the number of moles of the "th componentat t = 0, and x is the reaction coordinate as given in eq.(3.6) with x(0) = 0. The integrated rate law is
the solution of which depends upon the initialconcentrations of the components n"(0) for r > 1. Whenr = 1, the solution to eq. (3.13) is
or, equivalently,
which is the familiar equation for first-order exponentialdecay. If the initial concentrations of all the componentsin the reaction are equal [i.e., n"(0) = n"+1(0) / n(0), œ "
= 1,…,r - 1], eq. (3.13) can be integrated and solved for xto give
for all r > 1.When the reaction is a reversible reaction, the
phenomenological rate law is
which when written in integral form becomes
Eq. (3.15) can be integrated only in very limited cases,such as the second-order (r = 2, s = 4) case, where thevalues of n" (" = 1,2) are equal, and the initialconcentrations of n$ ($ = 3,4) are zero.
The Hamiltonian approach [11,24,25] to the solutionof an irreversible reaction modeled by eq. (3.7) when k1!= 0 begins with the reaction rate defined by eq. (3.12)where the reaction coordinate x is defined by eq. (3.6)without the assumption of x(0) = 0. Eq. (3.10) impliesthat the second time derivative of eq. (3.12) is equal to thenegative gradient of the potential for the system. Thus,the reaction potential is given by [11,24,25]
which implies that the reaction Hamiltonian is
The dynamical equations for the chemical reaction arenow given by the solution to Hamilton’s equations [eq.2.28]. The analytic solutions to these equations can beobtained by solving eq. (3.17) using Hamilton-Jacobitheory [18] and, in every instance, agree with thosesolutions obtained using the phenomenological approach[24,25]. For a reversible reaction [eq. (3.7) with k1! … 0],the reaction Hamiltonian has the form of eq. (3.11) witha potential given by [11,24,25]

(3.18)
(3.19)
(3.20)
(3.21)
(3.22)
Although the Hamiltonian formulation of chemicalkinetics initially appears more complicated, as thecomplexity of a chemical system increases, the ability towrite a reaction Hamiltonian and to use the solutiontechniques developed for solving Hamiltonian systems[18,22] improves the chance of obtaining analyticsolutions to the rate equations.
C. Autocatalytic Reactions [11,26]
Consider a chemical system having a fixed number ofreactions n which are coupled via a single intermediate X:
for all i = 1, …,n, where the components A" and A!", " =1,…,r, are maintained constant, and the coefficients ai",a!i" and ci
(j) (j = 1,2) for the ith reaction are non-negativeintegers [11,26]. An autocatalytic reaction is a reactionwhich produces as a product a larger quantity of one ofthe reactants than is used in the reaction. An autocatalyticscheme is a special case of eq. (3.18), where for at leastone of the reactions ci
(2) > ci(1).
The phenomenological rate law for the above reactionscheme, if ki! = 0, is
where
is the rate of change of the concentration of component X(denoted by [X]) in the ith reaction. The sign of eq.(3.20) is positive if ci
(2) > ci(1) and negative if ci
(1) > ci(2). If
the reaction scheme is reversible, eq. (3.20) becomes
In general eq. (3.19) can only be solved for small n interms of known functions.
The development of a reaction Hamiltonian for thechemical system of eq. (3.18) with ki! = 0 [11,26] beginsby defining the reaction coordinate for the system,
where n0 is the initial number of moles of component X,xi is the reaction coordinate of the ith reaction [as definedby eq.(3.6)], and <iX is the stoichiometric coefficient of Xin the ith reaction [11,26]. The reaction Hamiltonian forthe chemical system represented by eq. (3.18) when ki! =0 is [11,26]
where the potential Vi(x), given by
constitutes the contribution from the ith reaction, and thepotential Vij(x), given by
represents the coupling between the ith and jth reactions,with the sign being determined by the particular set ofreactions under consideration. Since every possiblecombination of binary coupling appears in theHamiltonian, the total number of coupling terms for a setof n reactions is [11,26] C(n) = n! [2! (n - 2)!]-1. Eq. (3.22)can also be used for reversible reactions by realizing thata set of n reversible reactions can be written as a set of 2nirreversible reactions [11,26]. Once a reactionHamiltonian is known, the solution techniques employedin Hamiltonian dynamics can be used to analytically solvethe dynamical system [18,21,22].
In the next section, the phenomenological approach tothe solution of simple and autocatalytic reactions will beused to set up dynamical models for some commonchemical oscillators.
D. Oscillating Chemical Reactions
In this Section, a brief introduction to chemicalsystems which exhibit sustained oscillations is presented.

(LV)
Fig. 4. Solution curves to eq. (3.23) of text showing the closedtrajectories indicative of periodic solutions.
Fig. 5. Solution curves to eq. (3.24) of text indicating growingoscillations.
(3.23)
(MLV)
(3.24)
This introduction will be expanded in Part 4 to a morethorough investigation of one of the models presentedbelow, namely the Lotka-Volterra model. Oscillatingchemical reactions are multi-component, multi-stepsystems which must possess at least one autocatalytic stepand have a component which exhibits sustainedoscillations in space or time. The autocatalytic stepcreates a feed-back loop which, in a sequence of chemicalreactions, is defined as the inhibition or activation of onestep in the reaction by a product of a later step in thereaction.
The simplest reaction scheme which exhibitssustained oscillations in time is the Lotka-Volterrasystem. This system, originally introduced in 1920 by A.Lotka [27], and later modified by V. Volterra [28] for usein ecology, is modeled by the following set of reactions:
We assume here that the concentration of A1 is heldconstant by contact with an external reservoir, theconcentration of A2 is constant during the course of thereaction, and A3 is unreactive. Under these conditions,the dynamics of the system are completely defined by thechanges in the concentrations of the two autocatalyticintermediates X1 and X2.
The phenomenological rate laws for the LV reactionscheme are
where, if the volume of the reaction remains constantduring the course of the reaction, xi=[Xi] (i=1,2), a = k1
[A10], b = k2, and c = k3 [A20], with [Ai0] symbolizing theinitial concentration of the component Ai. Numericalintegration of eq. (3.23), which will be considered furtherin Part 4, shows that the LV model has closed trajectories(see Fig. 4), indicating the existence of periodic solutions.Until recently [29], however, the analytic form of thesesolutions was not known. In Part 4, we present thetechnique used to obtain the analytic solutions to eq.(3.23).
Continued interest in the LV problem is a result of theease with which it can be modified to model a variety ofsystems in many different fields. Today, one of the mainapplications of the Lotka-Volterra system is in modelingthe interaction of biological species [30,31], not chemicalreactions. However, G. Rabal and co-workers [1] haveused the LV scheme, and a modification of this scheme,to model pH regulated oscillating systems which weredesigned for a continuously stirred tank reactor. Themodified reaction scheme which they [1] used is
The dynamical equations for this system are
where a = k2 [A10] [A20], b = k3 [A10], and c = k1 [A10][A20]. This system, which is similar to Lotka’s 1910reaction scheme [32], has an unstable critical point at(c/a, a/b) [see Fig. 5], indicating that the intermediatesexhibit forced oscillations (i.e., oscillations that increasein amplitude over time).
The next major advance in the study of chemical

(3.25)
Fig. 6. The solution curves for the Brusselator model illustratingthe existence of a stable limit cycle.
(3.26)
(OREG)
(BR)
oscillators was in 1952, when A. M. Turing [33] showedthat a chemical reaction coupled with diffusion couldexhibit stable spatial patterns. Later, Prigogine and co-workers [34,35] illustrated this phenomenon with thereaction mechanism
This mechanism, and any modifications to thismechanism which possess a 3rd order autocatalytic step,are referred to as the Brusselator [36] (since Prigogineand his associates were working in Brussels at the time).The intermediates X1 and X2 show sustained oscillationsin time without including diffusion. If diffusion terms areincluded, however, spatial patterns also develop. Thephenomenological rate laws, if diffusion is not consideredand if the concentrations of Ai (i=1,…,4) are constantthroughout the course of the reaction, are
where a = k1 [A10], b = k2 [A20], c = k3 and d = k4. Thesolution curves of eq. (3.25) exhibit a stable limit cycle(see Fig. 6). A limit cycle is a closed trajectory inconfiguration space which has the property that everytrajectory sufficiently near the limit cycle approaches thiscycle either as t 6 4 (a stable limit cycle) or as t 6 -4 (anunstable limit cycle) [13]. When a stable limit cycleexists, the structure of the oscillation will be stable forsmall perturbations of the initial values of x1 and x2 [13],implying that the qualitative behavior of the oscillations
is less dependent on the initial concentrations of thesystem.
Until recently [37], the LV reaction scheme and theBrusselator were the only two-component reactionmechanisms known which had intermediates exhibitingsustained oscillations. N. Samardzija and co-workers[37] have developed a method which allows them totransform the Van der Pol [12,13] rate equations,
where : is a positive constant, into phenomenologicalrate laws which can be modeled by a complex (10 step)reaction scheme with intermediates that show sustainedoscillations.
The first reaction known to exhibit both spatial andtemporal oscillations is the three-component reaction ofthe cerium-ion catalyzed oxidation of malonic acid bybromate in a sulfuric acid medium [38,39]. The reactionmechanism proposed by Field, Körös, and Noyes (FKN)for this so-called Belousov-Zhabotinskii reaction [2]consists of two processes, as summarized in Table 1. Thefirst process, process A, is the reduction of bromate ionsby bromide ions through a series of oxygen transfers.When the concentration of the bromide level goes belowa certain critical concentration, the reaction switches tothe second process, process B, which is the oxidation ofCe(III) by the radical BrO20000 species. This reactionautocatalytically produces bromous acid, which is acomponent in the first process. The Ce(IV) produced bythe oxidation of Ce(III) reacts with one of the products ofprocess A to produce the bromide ion. As theconcentration of the bromide ion increases past thecritical concentration, the reaction switches back toprocess A. Thus, the bromide ion can be viewed as adelayed negative feed back component [2,5].
A generalization of the FKN mechanism, generallyreferred to as the Oregonator, leads to the followingreaction scheme [2,5]:

Table 1. FKN [2,5] mechanism for the Belousov-Zhabotinskiireaction.
Process A
Process B
Net Reaction
Side Reactions
(LV)
(3.26)
(OREG)
where f is a stoichiometric factor [5]. If the rate constantsfor the reverse reactions are close to zero, and theconcentrations of Ai, œ i = 1,…,4, are held constant, thenthe rate laws for the Oregonator can be written
where a = k1 [A10] and b = k3 [A20]. The solutions of eq.(3.26) exhibit stable limit cycle behavior.
Using the law of mass action, N. Samardzija and co-workers [36] have transformed numerous well knownmulti-dimensional dynamical systems, such as the Rösslerrate equations [40], the Lorenz attractor rate equations
[41], and the rate equations for the forced Duffing system[42], into phenomenological rate laws which can be usedto model large multi-step chemical reaction schemes. Theintermediates in these schemes not only show oscillatorybehavior but also show chaotic behavior like period-doubling (when the period of the limit cycle successivelydoubles, causing the system to circulate twice around thecycle before the initial concentrations are restored).
Since the first introduction of chemical reactionschemes which possess rate equations exhibitingsustained oscillations [27], and the discovery of an actualoscillating chemical system [38,39], the theory ofoscillating chemical reactions has been an extremelyactive area of research. Nevertheless, oscillatoryphenomena are still not well understood, mainly due tothe lack of a sufficiently developed mathematicaltreatment of the highly nonlinear first-order differentialequations which model these systems. In the nextSection, a method for obtaining analytic solutions toconservative dynamical systems possessing two degreesof freedom will be developed and applied to the Lotka-Volterra (LV) model.
4. THE LOTKA-VOLTERRA MODEL
A. Introduction
Since the Lotka-Volterra problem was originallyposed in 1920 by Lotka [27], it has been one of the moststudied models for a two-dimensional dynamical systemexhibiting sustained oscillations. Among the reasons forthe popularity of this model are the relative simplicity ofthe differential equations which characterize the system,and the wide applicability of this system to a variety ofdifferent physical, chemical and biological problems.
The chemical reaction scheme originally developed byLotka [27] is
which, when the concentrations of A1, A2, and A3 areassumed to be constant, leads to the rate equations givenby eq. (3.23), namely
where a, b, and c are as defined in Chapter 3. V. Volterra

(4.2)
(4.1)
[28] later recast this model in terms of the populations oftwo interacting biological species, where one speciespreys upon the other. Both Lotka [27] and Volterra [28]generalized the two species model [eq. (3.23)] to an n-dimensional system (GLV) modeled by the rate equations
for all i = 1, …, n, where gi is the coefficient of increaseor decrease of the ith species, $i measures the strength ofcoupling of the ith species to predator-prey interactions,and "ij gauges the interaction between the ith and the jthspecies.
The LV and GLV models have been adapted andapplied to neural networks [43], epidemiology [44], andmode-specific coupling in lasers [45], as well as beingused in population biology [30,46] and chemical kinetics[1,47]. Recently, V. Fairen and B. Hernández-Bermejo[48] showed that any set of kinetic equations can beassociated to an equivalent GLV representation by theintroduction of suitable collective variables. These resultshave later been expanded for application to generalnonlinear systems [49].
Despite the increasing number of LV applications, theanalytic solutions to this problem have never beenexplicitly determined until the present work. Since theoriginal publications [27,28], the system was known to beconservative, thus implying that the solutions are periodic,but the analytic form of the solutions was unknown.Many different techniques have been applied anddeveloped in the attempt to derive analytic solutions tothe LV model. One of the first methods applied whentrying to determine the nature of the solutions to anordinary differential equation is numerical integration,since the numerical integration of an equation generatesdata which can then be plotted allowing for thevisualization of solution curves. The technique ofnumerical integration will be discussed and applied to theLV model later in this Chapter. Another traditionalapproach is linearization of the rate equations in order tosimplify the system [50]. The linearization of the LVmodel [51] leads to the rate equations
which are the familiar differential equations for theharmonic oscillator, and which have the general solutions[51]
where A, B, C, D, E, F (not all independent) aredetermined by the initial conditions, and T is determinedby a, b, and c. Other methods used in order to attempt todetermine directly analytic solutions to eq. (3.23) haveincluded decomposition methods [52], iterative solutiontechniques [53], and perturbation techniques [54,55].None of these methods leads directly to analytic solutionsto the LV model. Later in this Part, we present a directmethod involving a transformation which uses theinvariant of the LV system to derive the form of theanalytic solutions to eq. (3.23).
Another approach to obtaining analytic solutions tothe LV problem is to analyze the invariant, or firstintegral, of the system, since the existence of a firstintegral reduces the system to a one-dimensional problem.Since Lotka’s 1920 paper [27], the form of the firstintegral of eq. (3.23), namely
has been known. Normally when the invariant for a two-dimensional system is known, the invariant can be used toeliminate one of the variables. However, eq. (4.2) cannotbe easily solved for either x1 or x2 once given a fixed 7.The inability to solve eq. (4.2) in a straightforwardmanner has led to the development of Hamiltonian formsfor the LV model. In the 1960s, E. H. Kerner [56]showed that a simple logarithmic transformation of eq.(3.23) allows the LV model to be written in Hamiltonianform with the transformed eq. (4.2) being theHamiltonian. Kerner then expanded this logarithmictransformation to make it applicable to the GLV system[eq. (4.1)]. Recent interest in the Hamiltonian nature ofthe LV problem has led to the rediscovery of thistransformation for both the two-dimensional and multi-dimensional cases [57-60]. The ability to write aHamiltonian for the LV model led R. Dutt [61] in the1970s to apply Hamilton-Jacobi theory to Kerner’sHamiltonian, but because of the nontraditional form of theHamiltonian, only approximate solutions to the rateequations could be obtained. In an attempt to develop atraditional Hamiltonian for the LV model, T. Georgianand G. L. Findley [11] transformed the two-dimensionalLV system into a four dimensional system involving boththe rate equations and the acceleration equations. Later inthis Chapter the Hamiltonian nature of the two-dimensional LV model will be discussed in greater detail.
The form of the invariants for the GLV model [eq.(4.1)] has been an important area of research in the pastfew years. L. Cairó and M. R. Feix [62] used a Carlemanembedding method [63] to develop the linear polynomialfamily of invariants for the GLV model, whereas B.Grammaticos and co-workers [64] used a method based

on the Frobenius integrability theorem [65] to develop thesame invariants for the three-dimensional case. Thestudy done by Grammaticos and co-workers was laterclarified by S. Labrunie [66], who derived the conditionswhich must be satisified by polynomial first-integrals forthe three dimensional LV system. Another techniqueused by M. A. Almeida and co-workers [67] to determinethe invariants for the GLV model is a Lie symmetryanalysis [68]. The Lie symmetry method permitted M. A.Almeida and co-workers to determine conditions on theconstants gi, $i, "ij in eq. (4.1) which allow for theexistence of first integrals. As in the two-dimensionalcase, the existence of invariants for the GLV system hasled to the study of the Hamiltonian nature of the GLVsystem [69,70] in an attempt to develop analytic solutionsto the GLV model.
Although a large amount of research has been done onthe conservative nature and Hamiltonian forms of the LVand GLV systems, none of this research has led to analyticsolutions for either model until now. In this Part, wepresent (for background purposes) a simple technique fornumerically integrating eq. (3.23). Then, with the use ofeq. (4.2), a coordinate transformation is introduced toreduce the LV system to a one-dimensional problem,which can be modeled by a second-order nonlinearordinary differential equation. This characteristicdifferential equation is then formally integrated to give thequadrature which represents the analytic solution to theLV problem. Finally, the Hamiltonian nature of the LVmodel is explored from a novel perspective.
B. Numerical Integration
In the study of nonlinear differential equations,analytic solutions are usually unknown; therefore, one ofthe first steps in analyzing a nonlinear system is thenumerical integration of the differential equations fordifferent initial conditions. Numerical integrationgenerates a set of data which can be plotted, thus allowingvisualization of the solution curves which can help todetermine the stability of the system (as well as otherqualitative properties). Because of the frequency withwhich this technique is used, many different methods fornumerical integration have been developed; all of thesetechniques can be placed into one of three sub-divisions,however: extrapolation/interpolation, single-step meth-ods, or multi-step methods [71]. In this Section, a briefintroduction to these methods will be given, and then adetailed explanation of one type of single-step method,namely the Runge-Kutta method, will be presented andapplied to the LV model.
Extrapolation/interpolation methods involve the
approximation of an integral of the function f(t) oversome interval (a,b) by a summation. In other words [72],
where the form of ci and ti are determined by the methodused, and where n determines the level of approximation.(For example, in the Newton-Cotes (NC) methods ti / t0+ i h, œ i = 0,…,n, with h / (b-a)/n, t0 = a and tn = b for aclosed NC method, and h / (b-a)/(n+2), t0 = a+h, and tn= b-h for an open NC method.) This method can only beused if the differential equation can be written as a first-order, separable differential equation. (A separabledifferential equation in this context is a differentialequation which can be written in the form = f(t) g(x).)
Single-step and multi-step methods use weightedaverage values of f(x,t) taken at different points in theinterval tn # t # tn+1. This weighted average is defined by[71]
where h is the step size, or distance between the pointsalong an interval, and "i and $i are constants œ i = 1,…,k.If k = 1, implying that the value of x is dependent on theprevious step only, the method is a single-step method. Ifk > 1, the value of x is dependent on several previoussteps, and the method is known as multi-step. Thetechnique used for determining the constants "i and $iseparate the different single-step or multi-step methods[71]. Common single-step methods include the Euler, ortangent-line method, and the Runge-Kutta method.Common multi-step methods are the Milne Predictor-Corrector method and the Adams-Moulton methods. Themost popular method for numerical integration, becauseof the accuracy and ease of programming, is the single-step Runge-Kutta method which will now be discussed inmore detail.
The single-step Runge-Kutta method involves thegeneral equation [71]
where wi is a weighting coefficient to be determined, r isthe number of f(t,x) substitutions, and
for all i = 1, …, r. The determination of the parameters

(4.3)
(4.4)
(4.5)
wi, ci, and aij is done by Taylor series expansion of xn+1 inpowers of h, such that this expansion agrees with thesolution of the differential equations to a specifiednumber of terms in the Taylor series [71]. The number rof terms in the Taylor series defines the order of theRunge-Kutta method. The local truncation error for ageneral Runge-Kutta method is proportional to hr+1, andthe global truncation error for a finite interval isproportional to hr [51]. Since both the error and thestability of the numerical integration using a Runge-Kuttamethod are related to the step-size h chosen for theintegration [71], J. B. Rosser [73] has developedtechniques which allow the step-size to be adjusted duringthe numerical integration. This modification allows theRunge-Kutta methods to be used for stiff differentialequations. (A stiff differential equation is one which hasat least one rapidly decaying solution [50,71].)
The most common Runge-Kutta method used fornumerical integration is the classic fourth-order Runge-Kutta. This method can be applied to both first-order andsecond-order differential equations with only slightmodifications to the general Runge-Kutta formula. Thegeneral fourth-order Runge-Kutta formula for numericalintegration of a first order differential equation [ = f(t,x)]is [74]
where
When the differential equation is a second-orderdifferential equation [ =f(t,x, )], the numerical integra-tion formula becomes
where
All of the solution curves which are used as figureillustrations in the present work were obtained bynumerically integrating the relevant differential equationsusing one of the two Runge-Kutta methods presentedabove.
The numerical integration of the LV system can beaccomplished in three different ways using a fourth-orderRunge-Kutta technique. Each of these methods producesthe same numerical results, although the stability of theintegration for different initial conditions differs for eachmethod. The first method is the direct numericalintegration of eq. (3.23) using eq. (4.3). This method iseasily coded as an executable program, or even as a macroin a spreadsheet, making the data easily accessible foranalysis. This integration of the rate equations is stableover a wide range of initial conditions. The secondmethod involves the numerical integration of the secondtime derivatives of eq. (3.23), namely
using a modification of eq. (4.4). Although this methodproduces the same numerical results, it is not as stable asthe first method, which means that this method cannot beused for extreme initial conditions. The final methodnumerically integrates the four-dimensional systemderived by expressing eq. (4.5) as a system of first-orderdifferential equations. This method proved to be the leaststable of the three methods used for numerical integration.
The numerical integration of the LV system [eq.(3.23)] allows for the shape of the solution curves to bevisualized. The solution curves for x1 and x2 are doublyperiodic functions, with the solution of x2 being slightlyout of phase with respect to x1 (see Fig. 7). This doubleperiodicity suggests that the solutions to eq. (3.23) arerelated to the family of elliptic functions [74]. Later inthis work, the relationship between the analytic solutions

(4.7)
(4.11)
(4.12)
(4.13)
(4.14)(4.8)
(4.9)
(4.10)
(4.6)
Fig. 7. The solutions of eq. (3.23) of text showing the doublyperiodic nature of x1 and x2. (Curves are for the constant values a =0.50, b = 1.30, and c = 0.67 and the initial conditions x1(0) = 0.90 andx2(0) = 0.30.
to the LV problem, which will be derived in the next sec-tion, and the elliptic functions will be shown.
C. Analytic Solutions [29]
The numerical integration of the LV problem allowsthe solution curves to be visualized, but does not give theform of the analytic solution. In this section, a simplecoordinate transformation will be presented whichreduces the LV system to a one-dimensional problemcharacterized by a second-order nonlinear autonomousordinary differential equation. The integral quadraturewhich represents the solution to this differential equationis then derived.
The development of the analytic solution to eq. (3.23)begins by using the invariant 7 [eq. (4.2)] to define newcoordinates z1(t) and z2(t) such that
Several different ways of partitioning eq. (4.2) into twonew coordinates consistent with eq. (4.6) are possible.We choose to define the new coordinates by placing thelinear terms of the invariant into one coordinate, and thenonlinear terms of the invariant into another, to give
This choice allows for the original coordinates x1 and x2to be expressed in terms of the new coordinates as
Because of eq. (4.6), the new coordinates can be writtenas a single angle N defined by
With z1 and z2 now being defined as
both eq. (3.23) and the time derivative of eq. (4.2) reduceto the same second-order nonlinear autonomous ordinarydifferential equation, namely
Since solving eq. (4.10) is equivalent to solving the rateequations for the LV model [i.e., eq. (3.23)],simplification of eq. (4.10) is in order. By defining a newangle M = 2 N, and by using the half-angle formulas [72],eq. (4.10) reduces to
Eq. (4.11) still cannot be solved formally as yet, but it canbe further simplified by defining a new variable w as
which reduces eq. (4.11) to
Transforming eq. (4.8) to the new variable gives thevalues of the original coordinates x1 and x2 as
Eq. (4.13) can be formally integrated using a symbolic

(4.16)
(4.17)
(4.18)
(4.19)
(4.20)
(4.21)
(4.15)
Fig. 8. Numerical solution of eq. (4.13) of text showing thedoubly periodic nature of the formal solution, namely eq. (4.15) oftext.
processor [75] for the special case of a = c to give theanalytic solution (via quadrature)
where t0 and w0 are dependent on initial data. Eq. (4.15)represents a new function. Numerical analysis of eq.(4.13) using eq. (4.3) shows that the implicit function wis doubly periodic (see Fig. 8), indicating a relationship tothe Jacobian elliptic functions [74]. This relationship willbe explored further in the next Part.
When c … a, the solution of eq. (4.13) is moreproblematic, but straightforward. The first step in solvingeq. (4.13) is the rearrangement of the invariant [eq. (4.2)]to yield
where " = c/a and k2 = - b2 e-7/a. Substituting eq. (4.16)into the rate equations [eq. (3.23)] gives
which, upon using the transformation given by eq. (4.14),allows eq. (4.13) to be written as
Eq. (4.18) can be formally integrated using a symbolicprocessor [75] to give the analytic solution (viaquadrature)
where t0 is an initial datum and D solves
When " = 1 (a = c), eq. (4.19) reduces to eq. (4.15), withw0 = k2.
Even though eq. (4.18) cannot be integrated in termsof known elementary functions, it does represent theanalytic solution to the LV problem, since substitution ofthe values of w and obtained from a numericalintegration of eq. (4.18) into eq. (4.14) generates the samesolutions as a direct numerical integration of eq. (3.23).An introductory analysis of eq. (4.18) using a powerseries expansion will be presented in the next Part in thecontext of generating analytical solutions to a LV-relatedfamily of differential equations.
D. Hamiltonians
As mentioned in Section 4.A, a great deal of interesthas been expressed in the Hamiltonian form of the LVmodel, mainly because of the powerful solutiontechniques which can be applied if a Hamiltonian exists.Although the analytic solution to the LV model wasderived in the last Section without using a Hamiltoniantechnique, in this Section we will review differentapproaches to developing Hamiltonians for the LVproblem, since Hamiltonian methods are important whenconsidering the symmetry of the system.
In the 1960s, while studying the dynamical aspects ofchemical kinetics, E. H. Kerner [56] showed that the LVmodel could be placed into Hamiltonian form using asimple logarithmic transformation. This transformationdefined the position q and the momentum p as [56]
which allowed the rate equations to be written as
The invariant for the transformed system is theHamiltonian and is defined by [56]
which by direct differentiation with respect to q and pyields Hamilton’s equations. This Hamiltonian, however,because of its nontraditional nature, cannot be solvedusing Hamilton-Jacobi theory or any of the otheradvanced solution techniques that Hamiltonian dynamicsallows. (A traditional Hamiltonian is defined by aninvariant having the form of eq. (2.27).)
In an attempt to develop a more traditional

(4.24)
(4.25)
(4.26)
(4.27)
(4.28)
(4.29)
(4.30)
(4.31)
(4.32)
(4.33)
(4.34)
(4.35)
(4.36)
(4.37)
(4.22)
(4.23)
Hamiltonian, T. Georgian and G. L. Findley defined apossible reaction Hamiltonian as [11]
where yi = , and
which comes from assuming that M2 = M1 (Mi = M/Mxi
for i = 1,2). Eq. (4.23) was proposed initially as aholonomic constraint [11]. However, the Hamiltonianrepresented by eq. (4.22) is not constant because thecondition implied by eq. (4.23) does not hold for anyarbitrary trajectory (although it does hold for the criticalpoint). This approach does allow, however, formodifications in terms of a coordinate transformation andan integrating factor.
We begin the modification of eq. (4.22) by definingnew coordinates q1 and q2 such that
which transform the rate equations [eq. (3.23)] to
This transformation is similar to the transformation whichKerner applied [56], except that both of the originalcoordinates are kept as position coordinates. TheHamiltonian for the system can now be defined by
where the form of the conjugate momenta pi (i = 1,2) willbe discussed below, : / :(p1,p2) is an integrating factorwhich will also be discussed below, and V is a potentialwhich solves
with being the accelerations and > / >(q1,q2). Theacceleration equations, derived by taking the second timederivative of eq. (4.25), are
In order for eq. (4.27) to be satisfied and for dV to be anexact differential, the second derivatives of the potentialmust commute. In other words, which gives the characteristic partial differential equationin terms of > as
The solution of eq. (4.30) for >, which defines thepotential since
begins by defining a new function $(q1,q2) such that
which is solved by
If the potential is defined as V = - $ , then theaccelerations [eq. (4.28)] can be written as
with > being defined as
Thus, the Hamiltonian is now
Hamilton’s equations [eq. (2.28)] imply that
which can be used to develop relationships for pi (i = 1,2),as well as the form of the function :. At this time, wehave not investigated the functional form for either pi or: other than the relationships given in eq. (4.37).

(4.38)
(4.39)
(4.40)
(4.41)
(4.42)
(4.43)
(4.44)
(4.45)
(4.46)
Another method which can be used to develop aHamiltonian for the LV system also uses the coordinatetransformation represented by eq. (4.24). G. D. Birkoff[76] showed that any dynamical system with two degreesof freedom can be transformed into a system possessinga Lagrangian
where "i (i = 1,2) and ( are functions of q1 and q2 only,and satisfy the following conditions:
A Legendre transformation of eq. (4.38) defines theHamiltonian as
where the conjugate momenta pi are defined by
and where the potential ( is determined by eq. (4.39). Ifwe want the system to satisfy the condition that the timederivative of the momenta equal the accelerations, then "1and "2 must be constants for any set of initial conditions.Therefore, we define "1 and "2 as
since 7 is invariant for any set of initial conditions.Substitution of eq. (4.42) into eq. (4.39) gives the partialdifferential equations which the potential must solve.Since the second derivatives of ( commute, eq. (4.39) canbe integrated to define the potential as
With this definition of the potential, the Hamiltonianbecomes
with the derivatives being given as follows:
The partial derivatives of the potential ( are:
The Hamiltonian represented by eq. (4.44) is in thetraditional form, but with a velocity dependent potential.
Since the system being characterized by eq. (4.44) isa four-dimensional system, three constants of the motionshould exist. Two of the constants, namely the originalinvariant [eq. (4.2)] and the Hamiltonian [eq. (4.44)],have now been developed. As discussed in Part 2, theHamiltonian for a dynamical system can be used to findthe other constants of the motion by construction of aPoisson bracket. If f(q,p) is an invariant for the dynamicalsystem, then the Poisson bracket of f(q,p) with H [eq.(4.44)] can be reduced using eq. (4.45) to the condition

(4.47)
(5.1)
(5.2)
Fig. 9. The configuration space trajectories of eq. (5.2) of textfor different values of n. The initial conditions for the numericalintegration where x1(0) = 0.70000, x2(0) = 0.55560 and the structuralconstants were a = 1.0, " = 1.0, and k = 0.35845 i (where ).
One approach to solving eq. (4.46) is to define a functionR such that
which is solved by
The existence of three independent invariants (representedby 7 [eq. (4.2)], H [eq. (4.44)] and R [eq. (4.47)]) impliesthat the system is completely integrable. (The linearindependence of the three invariants was checked bycomputing the Jacobian of the system, which is non-zero.)Complete integrability implies that the LV system can berepresented by one independent variable, which wasshown explicitly in the last section.
5. LOTKA-VOLTERRA RELATED FAMILY OFDIFFERENTIAL EQUATIONS
A. Development [77]
As mentioned in Part 4, the technique used to solvethe LV model leads to a family of LV-related differentialequations. In this Part, this family will be derived, andthe analytic solutions (which represent approximatesolutions to the LV model) will be presented. The familyof invariants for this system will be developed, and asimple transformation will be shown which allows thesesystems to be written in Hamiltonian form.
In Section 4.C, the rate equations for the LV modelwere rewritten as [eq. (4.17)]
where k2 = - b2 e-7/a. Introducing a power series expansionfor the exponential term yields
A family of differential equations related to the LV modelcan be derived by truncating the power series in eq. (5.1)to give
for n = 0,…,4, with n = 4 corresponding to the LVmodel. (Although the value of k2 can be any negativenumber, for the system to become the LV model as n 6 4,k must be defined by k2 = - b2 e-7/a, where 7 is the valueof eq. (4.2) at t = 0.) The family of differential equationsrepresented by eq. (5.2), even though it appears to bemore complicated than the original LV problem, will beshown in the next Section to possess analytic solutions interms of known functions for the cases when " =1 and n# 3. The integral quadrature for the cases of n = 2 and n= 3 will also be presented. Numerical integration of eq.(5.2) shows that for n $ 2, the solution curves are closed,which implies the existence of periodic solutions (see Fig.9). Thus, eq. (5.2) represents a family of two-dimensionaldynamical systems which show sustained oscillations.
Eq. (5.2) may have applications in a variety of areas.In the 1970s, J. J. Tyson and J. C. Light [6] developed atechnique for deriving two-component reaction schemesmodeled by equations similar to this family. (Due to thecomplexity of the rate laws, however, no attempt wasmade to obtain analytic solutions.) Another area in whichthis family may have applications is population biology,since eq. (5.2), when n = 2 and " = 1, has the quadraticcoupling term which appears in the LV predator-prey

(5.3)
(5.4)
(5.5)
Fig. 10. The solution curves of eq. (5.3) of text when " = 1 for n =4 and n = 4, showing both the doubly periodic nature of the solutionsas well as the order of approximation to the LV model.
(5.6)
(5.7)
model [eq. (3.23)], as well as the quadratic termsdependent only upon x1 and x2 (which is reminiscent ofthe LV competition model [78]).
B. Analytic Solution [77]
In this Section, eq. (5.2) will be reduced to a one-dimensional system modeled by a second-order nonlineardifferential equation. The analytic solutions to thisequation in terms of known functions will be derived forthe special cases " = 1 and n # 3, and the integralquadratures will be derived which represent the analyticsolutions for the special cases " = 2 and " = 3. Therelationship between these analytic solutions and theanalytic solution to the LV model [eqs. (4.15) and (4.19)]will be discussed.
Since the family of differential equations representedby eq. (5.2) is directly related to the LV model, the sametransformation, namely eq. (4.14), can be used to reducethe present system to a one-dimensional problem modeledby the variable w(t). This one-dimensional system ischaracterized by the second-order differential equation
for n = 0,…,4. Eq. (5.3), which as n 6 4 becomes thecharacteristic differential equation for the LV model [eq.(4.18)], can be integrated using a symbolic processor [75]to give the quadrature
where D is given by the solution to the polynomial
for all n = 0, …, 4. Eq. (5.5) can be solved in terms ofradicals for " # 3 with the aid of a symbolic processor[75]. Numerical integration of eq. (5.3) for a specifiedvalue of " > 0 and n > 1 shows that the solution curvesare doubly periodic functions with the same general shape
as that for the LV model (see Fig. 10). As the value of nincreases, the solution curves of eq. (5.4) become betterapproximations to the LV model.
When " = 1, eq. (5.5) is a second order polynomialwhich can be solved using the quadratic formula to give
which when substituted into eq. (5.4) yields the integralquadrature
Eq. (5.6), which reduces to eq. (4.15) when n = 4, can besolved in terms of known functions for n # 3 (with theuse of a symbolic processor [75,79]); these solutions arepresented in Table 2. From these solutions it becomesobvious that the doubly periodic nature of the LV problemappears as a result of the higher-order terms in the powerseries expansion, since the solutions for the n = 0 and n =1 case are exponential (although the solution for the n =1 case can become periodic when a2 < 2 k2). Ellipticfunctions, like the solutions to the n = 2 and n = 3 case,are known for their doubly periodic nature [74].
For the case of " = 2, the solution of eq. (5.5) hasthree branches which, when substituted back into eq.(5.4), give

aM. Abramowitz and I. A. Stegun, Handbook of Mathematical Functions (Dover, New York, 1965).
Table 2. Analytic solutions to eq. (5.6) of text for n # 3.
n Solution
0
1
where
2
where F is an elliptic function of the first kinda and
with p2 defined as
n Solution
3
where
with p3 defined by

(5.8)
(5.9)
(5.10)
and
where p2 is defined as
When the summation in eq. (5.9) is allowed to go toinfinity, eqs. (5.7) and (5.8) represent the integralquadratures for the LV model when a = 2 c.
When " = 3, the four solutions to eq. (5.5), uponsubstitution into eq. (5.4), lead to the integral quadraturespresented below:
and
where
and
These analytic solutions to eq. (5.3) also represent thesolutions to the LV model when a = 3 c, if the summationis allowed to go to infinity.
The integral quadratures presented above, althoughnot reducible to known functions, do represent analyticsolutions to eq. (5.3) for finite n, and to eq. (4.18) forinfinite n. The numerical integration of these quadraturesleads to periodic solutions which are indicative of aconservative system. In the next Section, the invariantsfor eq. (5.2) will be derived, and a simple transformationwhich allows this system to be written in Hamiltonianform will be presented.
C. Invariants and Hamiltonians [77]
The fact that eq. (5.2) possesses closed curves assolutions (see Fig. 5.1) is indicative of the existence of aninvariant for the system. The derivation of the invariantfor any two-dimensional system modeled by a set of first-order differential equations begins by taking the ratio ofthe rate equations. For the system represented by eq.(5.2), this ratio is
which can be rewritten as
Eq. (5.10) can be integrated to give

(5.11)(5.15)
(5.12)
(5.13)
(5.14)
(5.17)
(5.18)
(5.16)
which can be shown by induction to be the first integral ofthe system as follows.
The condition for eq. (5.11) to be invariant is
where MiIn = MI/Mxi and for some specific valueof n. When n = 0, eq. (5.12) can be written as
which simplifies to zero. Now, eq. (5.2) can be writtenrecursively as
and Ij+1 [eq. (5.11)] can be rewritten as
Substitution of eq. (5.13) and the derivatives of eq. (5.14)into eq. (5.12) gives, upon rearrangement,
which (since M1Ij (j) + M2Ij
(j) = 0 by assumption)reduces to
Expansion and rearrangement simplifies eq. (5.15) tozero, thus completing the proof that eq. (5.11) is invariant.
Another method leading to the characteristicdifferential equation [eq. (5.3)] for eq. (5.2) begins bydefining new coordinates z1 and z2 in the same manner asdeveloped in Part 4 for the solution to the LV problem.The coordinate z1 is defined such that it contains only theterms linear in x1 and x2 in the invariant, while thecoordinate z2 contains the remaining terms of theinvariant. Applying the remaining coordinatetransformations of Part 4 reduces eq. (5.2) to eq. (5.3).
The transformation of eq. (5.2) into Hamiltonian formbegins by introducing new variables q and p such that
This transformation allows the rate equations [eq. (5.2)]for the system to be written as
and the invariant [eq. (5.11)] to be rewritten as
The derivation of Hamilton’s equations from eq. (5.18)may be shown simply as follows. The derivatives of eq.(5.18) with respect to q and p are

and
and (6.1)
(5.19)
which by direct comparison with eq. (5.17) leads toHamilton’s equations, namely
The Hamiltonian of eq. (5.18), like Kerner’s Hamiltonianfor the original LV problem, does not treat bothcoordinates equally. An extension of this system to a fullfour-dimensional space in order to develop a moretraditional Hamiltonian has not been attempted. If a moretraditional Hamiltonian can be developed for this generalfamily of functions, the nature of the third invariant forthe general system could be compared to the thirdinvariant of the LV model [eq. (4.47)] to perhaps givemore insight into the symmetry of both the LV problemand its related family.
6. CONCLUSIONS
In this Review, we have presented the analyticsolutions to the Lotka-Volterra problem. Our presentationbegan with a brief discussion of the qualitative propertiesof dynamical systems in Part 2. This treatment was thenused in Part 3 for the development and solution of the ratelaws pertaining to various chemical reaction schemes.Part 3 also provided a brief introduction to the study ofsystems which exhibit sustained chemical oscillations.Our study of chemical oscillations was then expanded inPart 4 to a more thorough investigation of the LV model,which led ultimately to the development of a newcoordinate transformation for the LV system. Thistransformation [eq. (4.7)] reduced the dimensionality ofthe LV problem by one and allowed for the developmentof an equivalent second-order differential equation [eq.(4.13)], which was then solved analytically viaquadratures. These quadratures [eqs. (4.15) and (4.19)],although not capable of being integrated in terms of
known elementary functions, define new functions whichrepresent the analytic solutions to the Lotka-Volterraproblem. In Part 5, an introductory analysis of theseanalytic solutions was provided, one which led to thedevelopment of a new family of LV-related dynamicalsystems [eq. (5.2)]. This family of dynamical systems,although appearing more complex than the LV system,could in some instances be solved in terms of knownfunctions (Table 2). The Hamiltonian forms for both theLV problem (Section 4.D) and the LV-related family [eq.(5.18)] were also explored. The analytic solutions to theLV problem represent, if fully analyzed, the definition ofnew elliptic-type functions. The full analysis of anyquadrature begins by comparing the form of its solutionsto the solutions of known functions. This comparisonleads to the development of approximations to thequadrature in terms of known functions, as well as toinsight into the nature of the function. For the analyticsolutions to the LV problem [eq. (4.19)], we began thiscomparison by performing a power series expansion onthe exponential term in the quadrature. When a = c,truncation of this expansion led to a relationship (given inTable 2) between this function and the family of ellipticfunctions [74]. A future full analysis of eq. (4.19) willinvolve showing that eq. (4.19) is convergent,determining the exact nature of the two periods of thesolution, and defining the singularities of the function(see, for example, E. T. Whittaker and G. N. Watson’sbook on modern analysis [80]).
The coordinate transformation employed to solve theLV model [eq. (4.7)], which involved the first integral ofthe system [eq. (4.2)], may have the capability of beinggeneralized to an n-dimensional system such as GLV (cf.Part 4). For example, an integrable four-dimensionalsystem will possess three invariants. If two of theseinvariants were known, four new coordinates zi (i =1,…,4) could be defined such that the system could berepresented by two angles Q and S, with these anglesbeing given by
With eq. (6.1), the old system could be represented by thesolution to two second-order characteristic differentialequations in terms of Q and S, which may or may not becoupled. (The coupling would depend upon the nature ofthe original invariants, and on how the coordinates zi aredefined.) If the differential equations are coupled, itmight be possible to use the same technique to reduce thesystem to one dimension if an invariant in terms of Q andS can be found.
The determination of the invariants of any n-

(6.3)
(6.4)
(6.5)
(6.2)
dimensional system, however, is a problem in its ownright. This problem can be solved in part if the systemcan be written in Hamiltonian form, since once aHamiltonian is known, the construction of the Poissonbracket with a general function can lead to insight into theform of other invariants. The Lagrangian that Birkhoff[76] developed for a two-dimensional system [cf. eq.(4.38)] can be generalized to an n-dimensional Lagrangiangiven by
where "i, œ i = 1,…,n, and ( are functions dependentonly upon the coordinates qi. These functions can bedetermined as follows. For eq. (6.2) to truly define aLagrangian, Lagrange’s equations [i.e., eq. (2.24)] mustbe satisfied. This condition leads to the function ( beingdefined by a system of n partial differential equations,namely
for all i = 1,…,n. If there exists a set of functions "i (i =1,…,n) such that ( possesses a complete differential (inother words, if all of the mixed partial derivatives of (commute), the system will be able to be written inLagrangian form. Once the Lagrangian is defined, aLegendre transformation (defined in Section 2.C, above)of eq. (6.2) leads to a Hamiltonian having the form
where the momenta of the system pi are defined by
Once eq. (6.4) is determined for the system, the Poissonbracket [i.e., eq. (2.31)] can be constructed and analyzedin order to develop the other invariants for the system.The existence of eq. (6.4) can also be used to determinethe analytic solutions to the system by applying Hamilton-Jacobi theory [22].
The family of LV-related differential equationsdeveloped in Part 5 [eq. (5.2)] represents a set of two-dimensional systems which show sustained oscillations(see Fig. 5.2). The applications for which these systemsmay provide models have not yet been explored. It maybe possible (using the techniques of J. J. Tyson and J. C.Light [6], or the approach of N. Samardzija and co-
workers [37]) to develop oscillating chemical reactionschemes, modeled by eq. (5.2), in which the analyticsolutions to the rate laws are known in terms of well-defined functions. Eq. (5.2) should also be able to berecast in terms of complex interactions betweenpopulations of biological species. This family ofdynamical systems clearly provides a rich analyticalground for a plethora of future model studies.
ACKNOWLEDGMENTS
This work was supported by the ULM DevelopmentGrants Program and by the Louisiana Board of RegentsSupport Fund (LEQSF (1997-00)-RD-A-14).
REFERENCES
1. G. Rábai, M. Orbán and I. R. Epstein, Acc. Chem.Res. 23, 258 (1990).
2. R. Field, E. Körös and R. Noyes, J. Am. Chem.Soc. 94, 8649 (1972).
3. G. Nicolis and I. Prigogine, Self Organization inNonequilibrium Systems (Wiley, New York,1977).
4. P. Glansdorff and I. Prigogine, ThermodynamicTheory of Structure, Stability and Fluctuations(Wiley-Interscience, New York, 1971).
5. R. J. Field and R. M. Noyes, J. Chem. Phys. 60,1877 (1974).
6. J. J. Tyson and J. C. Light, J. Chem. Phys. 59,4164 (1973).
7. Z. Yi, J. Math. Anal. 199, 391 (1996).
8. W. E. Stewart, W. H. Ray and C. C. Conley, eds.,Dynamics and Modeling of Reactive Systems(Academic Press, New York, 1980).
9. G. R. Gavalas, Nonlinear Differential Equationsof Chemically Reacting Systems (Springer-Verlag,New York, 1968).
10. C. Capellos and B. Bielski, Kinetic Systems: Mathematical Description of Chemical Kinetics inSolution (Wiley-Interscience, New York, 1972).
11. T. Georgian and G. L. Findley, Hamiltonian

Formulations of Chemical Kinetics, unpublishedmanuscript.
12. F. Verhulst, Nonlinear Differential Equations andDynamical Systems (Springer-Verlag, New York,1990).
13. N. Minorsky, Nonlinear Oscillations (VanNostrand, New York, 1962).
14. S. Lefschetz, Differential Equations: GeometricTheory (Wiley-Interscience, New York, 1963).
15. P. Hartman, Ordinary Differential Equations(Wiley, New York, 1973).
16. F. Brauer and J. A. Hohel, The Qualitative Theoryof Ordinary Differenital Equations (W. A.Benjamin, Inc., New York, 1969).
17. A. A. Andronow and C. E. Chaikin, Theory ofOscillations (Princeton University Press, NewJersey, 1949).
18. H. Goldstein, Classical Mechanics, 2nd ed.(Addison-Wesley, New York, 1981).
19. V. I. Smirnov (D. E. Brown and I. N. Sneddon,trans.), Advanced Calculus, Vol. II (PergamonPress, New York, 1964).
20. A. E. Taylor and W. R. Mann, Advanced Calculus(Wiley, New York, 1972).
21. J. B. Marion and S. T. Thornton, ClassicalDynamics of Particles and Systems, 4th ed.(Saunder College, Fort Worth, 1995).
22. C. Lanczos, The Variational Principles ofMechanics, 4th ed. (Univ. Of Toronto Press,Toronto, 1970).
23. P. Atkins, Physical Chemistry, 5th ed. (Freeman,New York, 1994).
24. T. Georgian and G. L. Findley, Int. J. QuantumChem., Quantum Biol. Symp. 10, 331 (1983).
25. T. Georgian, J. M. Halpin and G. L. Findley, Int.J. Quantum Chem., Quantum Biol. Symp. 11, 347(1984).
26. T. Georgian and G. L. Findley, J. Comp. Chem. 8,744 (1987).
27. A. Lotka, J. Am. Chem. Soc. 42, 1595 (1920).
28. V. Volterra, in Animal Ecology, R. N. Chapman,ed. (McGraw Hill, New York, 1926).
29. C. E. Evans and G. L. Findley, J. Math. Chem. 25,105 (1999).
30. S. Levin, Studies in Mathematical Biology (Math.Assoc. Amer., Providence, R.I., 1978)
31. R. M. Buchsbaum and M. Buchsbaum, BasicEcology (Boxwood Press, Pittsburg, 1957).
32. B. Chance, E. K. Pye, A. K. Ghosh and G. Hess,eds., Biological and Biochemical Oscillators(Academic Press, New York, 1973).
33. A. M. Turing, Philos. Trans. R. Soc. Lond. B 237,37 (1952).
34. I. Prigogine and G. Nicolis, J. Chem. Phys. 46,3541 (1967).
35. I. Prigogine and R. Lefever, J. Chem. Phys. 48,1695 (1968).
36. J. J. Tyson, J. Chem. Phys. 58, 3919 (1973).
37. N. Samardzija, L. D. Greller, and E. Wasserman,J. Chem. Phys. 90, 2296 (1989).
38. B. P. Belousov, Sb. Ref. Radiats. Med., 1958,Medgiz, Moscow, 145 (1959).
39. A. M. Zhabotinskii, Oscillatory Processes inBiological and Chemical Systems (Science Publ.,Moscow, 1967).
40. O. E. Rössler, Phys. Lett. A 57, 397 (1976).
41. E. N. Lorenz, J. Atmos. Sci. 20, 130 (1963).
42. P. Homes, Philos. Trans. R. Soc. London 292, 419(1979).
43. V. W. Noonburg, SIAM J. Appl. Math. 49, 1779(1989).

44. M. R. Roussel, SIAM Rev. 39, 106 (1997).45. E. Hofelich-Abate and F. Hofelich, Z. Physik 209,
13 (1968).
46. K. -i. Tainaka, Phys. Rev. Lett. 63, 2688 (1989).
47. Z. Noszticzius, E. Noszticzius, and Z. A. Schelly,J. Phys. Chem. 87, 510 (1983).
48. V. Fairén and B. Hernández-Bermejo, J. Phys.Chem. 100, 19023 (1996).
49. V. Fairén and B. Hernández-Bermejo, Math.Biosciences 140, 1 (1997).
50. W. Boyce and R. DiPrima, ElementaryDifferential Equations and Boundary ValueProblems, 5th ed. (Wiley, New York, 1992).
51. J. R. Brearly and A. C. Soudack, Int. J. Control27, 933 (1978).
52. S. Olek, SIAM Rev. 36, 480 (1994).
53. G. Czajkowski and P. Schillak, Nuovo Cimento12, 1477 (1990).
54. K. N. Murty and D. V. G. Rao, J. Math. Anal.Appl. 122, 582 (1987).
55. A. R. Hausrath and R. F. Manasevich, J. Math.Anal. Appl. 157, 1 (1991).
56. E. H. Kerner, Bull. Math. Biophys. 26, 333(1964).
57. Y. Nutku, Phys. Lett. A 145, 27 (1990).
58. E. H. Kerner, Phys. Lett. A 151, 401 (1990).
59. M. Plank, J. Math. Phys. 36, 3520 (1995).
60. E. H. Kerner, J. Math. Phys. 38, 1218 (1997).
61. R. Dutt, Bull. Math. Biol. 38, 459 (1976).
62. L. Cairó and M. R. Feix, J. Math. Phys. 33, 2440(1992).
63. T. Carlemann, Acta Mathematica 59, 63 (1932).
64. B. Grammaticos, J. Moulin-Ollagnier, A. Ramani,
J. -M. Strelcyn and S. Wojciechowski, Physica A163, 683 (1990).
65. J. -M. Strelcyn and S. Wojciechowski, Phys. Lett.A 133, 207 (1998).
66. S. Labrunie, J. Math. Phys. 37, 5539 (1996).
67. M. A. Almeida, M. E. Magalhães, and I. C.Moreira, J. Math. Phys. 36, 1854 (1995).
68. S. Lie, Vorlesungen über DifferentialGleichungen (Teubner, Leipzig, 1891).
69. M. Plank, Nonlinearity 9, 887 (1996).
70. C. Cronström and M. Noga, Nucl. Phys. B 445,501 (1995).
71. L. Lapidus and J. H. Seinfeld, Numerical Solutionof Ordinary Differential Equations (AcademicPress, New York, 1974).
72. D. Zwillinger, CRC Standard MathematicalTables and Formulae, 30th ed. (CRC Press, BocaRaton, Florida, 1996).
73. J. B. Rosser, SIAM Rev. 9, 417 (1967).
74. M. Abramowitz and I. A. Stegun, eds., Handbookof Mathematical Functions with Formulas,Graphs, and Mathematical Tables (Dover, NewYork, 1972).
75. Maple V, Rel. 4.00a, Waterloo Maple, Inc.,Waterloo, Ontario.
76. G. D. Birkhoff, Trans. Amer. Math. Soc., 18, 199(1917).
77. C. M. Evans and G. L. Findley, J. Math. Chem.25, 181 (1999).
78. See, for example, M. A. Abdelkader, Int. J.Control 35, 55 (1982).
79. Mathematica Rel. 3.0, Wolfram Research, Inc.,Champaign, Illinois.
80. E. T. Whittaker and G. N. Watson, A Course ofModern Analysis (Cambridge Univ. Press., NewYork, 1958)







![Competitive Lotka-Volterra Population Dynamics with · PDF filearXiv:1102.2163v1 [math.PR] 10 Feb 2011 Competitive Lotka-Volterra Population Dynamics with Jumps Jianhai Bao1,3, Xuerong](https://img.pdfslide.us/doc/110x75/5aa5c9347f8b9a185d8dc6a8/competitive-lotka-volterra-population-dynamics-with-11022163v1-mathpr-10.jpg)


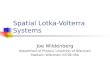






![On the Periodic Lotka-Volterra Competition Model › download › pdf › 82568635.pdf · PERIODIC LOTKA]VOLTERRA COMPETITION MODEL 59 the averages of the ‘‘birth rates’’](https://img.pdfslide.us/doc/110x75/5f1088e27e708231d44995e1/on-the-periodic-lotka-volterra-competition-model-a-download-a-pdf-a-periodic.jpg)











