Embed Size (px)
Citation preview

Analytic coordinates recording cubic dynamics. ∗
Carsten Lunde Petersen Tan Lei
January 17, 2008
Abstract
Let H be the central hyperbolic component of cubic polynomials (i.e. the onecontaining z 7→ z3). Works of Milnor show that H enjoys a kind of universalityproperty. We construct an analytic coordinate on H recording the dynamical invari-ants. We use quadratic dynamics as parameter models. This coordinate has goodextension properties to at least a large part of the boundary of H. We illustrate thisby proving some of these extension properties.
This paper concerns parameter spaces of rational maps viewed as dynamical systemsthrough iteration. The parameter space of a family of rational maps has often a naturaldecomposition into the hyperbolic locus and the non-hyperbolic locus: a rational mapis hyperbolic if and only if all its critical points are attracted to attracting periodicorbits. The hyperbolic locus is open (and conjecturally dense, in any reasonable family).A hyperbolic component is a connected component of the hyperbolic locus. Mapswithin the same hyperbolic component have essentially the same macroscopic dynamics.
However, this quantitative change of dynamics becomes qualitative and often drasticwhen one moves to the boundary of the hyperbolic component. Therefore a major researchinterest in this field is to understand the boundary structure of a hyperbolic component,including its topology, geometry and the bifurcations of the dynamics that occurs.
Given such a component H , in order to study its boundary, the first step is actuallyto study in detail the inner structure of H , to put our hand on an effective measuring ofthe (infinitessimal) changes of the dynamics within H .
One way to address this problem is to find some suitable model space X together witha map Φ : H → X , satisfying simultaneously the following properties:
1. (coordinate) Φ is injective in H and Φ(f) depends analytically on f ;
2. (dynamics) Φ(f) records a complete set of dynamical invariants of f . In otherwords from these invariants (together with some combinatorial data) one can reconstructf up to conformal conjugacy.
Once we have such a coordinate, we may use Φ(H) to represent H and use ∂Φ(H) tostudy ∂H . This will depend on boundary extension properties of Φ. Thus the next stepwill be to study how well Φ or Φ−1 extends to the boundary and to which extent it stillreflects the dynamical invariants.
∗AMS 2000 Mathematics Subject Classifications: 37F10, 37F20, 37F45, 32H02.
1

We will call Φ a dynamical-analytic coordinate on H .
Douady and Hubbard have already constructed such coordinates for the hyperboliccomponents of the family of quadratic polynomials. Furthermore their construction gen-eralizes easily to other families with only one critical point or singular value.
Concerning hyperbolic components with two or more critical points, there is a remark-able pioneering work by Mary Rees on the family of quadratic rational maps with markedcritical points ([Re], 1990). Rees provides topological-dynamical (non-analytic) coordi-nates for the hyperbolic components of the family, together with some radial extensionsto the boundary.
The main purpose of this paper is to construct a dynamical-analytic coordinate onthe principal hyperbolic component of the family of cubic polynomials, and then provethat this coordinate extends continuously to a large part of the boundary and records thebifurcations of the dynamics. Once this is done, we would obtain automatically a similarcoordinate for many other hyperbolic components, via a previous work of Milnor (howeverthe boundary extensions may vary from one another, and may require extra studies).
Our coordinate is similar in spirit to that of Mary Rees. However instead of usingBlaschke products we will use quadratic polynomial dynamics as part of dynamical in-variants (similar ideas can be found in [GK], [M3]). There are several advantages of doingso. On one hand, the quadratic polynomials are well-understood and are more conve-nient to deal with. On the other hand they lead to the analyticity of our coordinate,thus reflect better the analytic structure of the parameter space. This analyticity is alsoabsolutely essential in our study of the boundary, as it will allow us to do holomorphicmotions between parameter slices. In particular it will allow us to extend a powerfulresult of Faught-Roesch on a single slice to all the other slices. Moreover we use parts ofdynamical planes of quadratics to model cubic parameter slices. In the case of quadraticpolynomials with an indifferent fixed point there are still many unsolved questions. Anyfuture progress on the study of such quadratic polynomials will contribute to our furtherunderstanding of cubic polynomials.
Cubic parameter space and quadratic models
Let M3 denote the space of affine conjugacy classes [P ] of cubic polynomials, and let Hdenote the central hyperbolic component ofM3, i.e. the component containing the class[z 7→ z3]. This H can also be characterized as the set of [P ] of cubic polynomials suchthat P has an attracting fixed point in C, whose immediate basin contains two criticalpoints, or equivalently as the set of [P ] of hyperbolic cubic polynomials with a Jordancurve Julia set.
Denote by D the unit disc in C.
For (λ, a) ∈ C2, define Pλ,a(z) = λz +√az2 + z3. Then the map (λ, a) 7→ [Pλ,a] is well
defined from C2 onto M3 (as the two choices of√a will lead to conjugate polynomials),
but it is not globally injective (as one may normalize different fixed points to be at 0).However, if we assume λ ∈ D, then any P in [Pλ,a] will have an attracting fixed pointwith multiplier λ. It follows then easily that we may parametrize H as
H = a = (λ, a) | λ ∈ D, the immediate basin of 0 for Pa contains two critical points ,
2

and this makes H a connected and bounded open subset of C2. Define also for each λ ∈ D
the slice Hλ := (λ, a) ∈ H.Our first main result in this paper will be:
Theorem A (coordinatization). There is a complex manifold X isomorphic to D × C
and a dynamical-analytic coordinate Φ of H mapping H onto an open subset Y of X .
A more precise statement will be give in Theorem A’ below.
The definition of Φ is in fact quite easy to describe. It is based on the idea that a cubicpolynomial Pa = Pλ,a : z 7→ λz +
√az2 + z3 should behave like the quadratic polynomial
Qλ : z 7→ λz + z2 together with an extra critical point. More precisely we will produce asemi-conjugacy ηa from Pa to Qλ whose domain of definition contains both critical points,and whose image of the ’first’ attracted critical point is the critical point of Qλ. Now the’second’ critical point c1
awill have some position under ηa. Our map Φ(a) will be roughly
(λ, ηa(c1a)) ∈ D×C.
But the notation of ’first’ and ’second’ attracted critical point is not always welldefined. It is to rule out this ambiguity that we will have to perform a kind of cut andzip surgery on D× C, and to obtain a quotient space X for Φ(H) to live in.
There is a close relation between our coordinate Φ and Douady-Hubbard theory onthe quadratic family fc : z 7→ z2 + c:
The unique unbounded hyperbolic component H∞ of this family is characterized asthe set of c such that the critical value escapes to ∞ under the iterations of fc. Douadyand Hubbard defined a conformal isomorphism ϕ : H∞ → C r D, with ϕ(c) recording theBöttcher position of the escaping critical value. It turns out that this ϕ is a dynamical-analytic coordinate of H∞.
Now a parameter c /∈ H∞ is in the hyperbolic locus if fc has an attracting periodicorbit z0, . . . , zn−1. For each hyperbolic component H 6= H∞, Douady and Hubbard proved
that the multiplier map λH : H → D; c 7→ (fnc )′(z0) =
n−1∏
i=0
f ′c(zi) is a dynamical-analytic
coordinate on H .
In a way the first coordinate in our map Φ : H → X is the Douady-Hubbard multipliermap and the second is an adapted version of the Douady-Hubbard ϕ-map.
The boundary extensions
The Douady-Hubbard multiplier map λH has a homeomorphic extension to the closure,and, conjecturally, the inverse of the ϕ-map has a continuous extension to the closure.Many partial results have been obtained in this direction.
In our setting denote by Y the closure of Y in X . We will split the boundary ∂H ⊂ C2
into two parts. The tame part denoted ∂HD := (λ, a) ∈ ∂H|λ ∈ D, and the wild part∂HS1 := (λ, a) ∈ ∂H||λ| = 1. Set HD := H ∪ ∂HD.
Our second main result in this paper will be:
Theorem B (boundary extension) The map Φ : H → Y given by Theorem A extends asa homeomorphism Φ : HD −→ Y .
In forth coming papers we will study the wild part of the boundary of H, using (often
3

highly non-trivial) results on its quadratic counter parts. See Section A for a more detaileddescription.
Outline of the paper
In Section 1 we will give precise definitions and a restatement of Theorem A. The theoremis proved in the following three sections. In Section 6 we prove Theorem B.
In the appendix we will translate Theorem A to the settings of monic centered polyno-mials (Theorem C). We then recall results of Milnor and use them to carry our coordinateto other hyperbolic components of the same type (Corollary 17).
At the end of the paper we will provide a table of notations.
1 Basic definitions
Let f : W −→ C be holomorphic and suppose f(α) = α ∈W is an attracting fixed pointwith multiplier f ′(α) = λ ∈ D. Define the attracting basin B(α) = z ∈W |fn(z) −→
n→∞α.
We say that B(α) is a proper basin, if the restriction f : B(α) −→ B(α) is a proper map.Similar definitions apply when α belongs to an attracting cycle, i.e. fk(α) = α ∈W forsome k ≥ 1.
Attracting basins and attracting cycles come in two flavors: λ ∈ D∗ called attractingand λ = 0 called super attracting. If α is super attracting then
f(z) = α + ak(z − α)k +O(z − α)k+1,
with ak 6= 0, where k > 0 is the local degree at α. Moreover there exists a Böttchercoordinate around α, that is a univalent map φ : V −→ C, V ⊆ B(α), with φ(α) = 0and φ f = (φ)k. The Böttcher coordinate is unique up to multiplication by a (k − 1)-th root of unity. In the particular case of k = 2 (the case we are considering in thispaper), φ is unique. If α is attracting there exists a Schröder/linearizing coordinate or inshort a linearizer for f . It is a univalent map φ : V −→ C, V ⊆ B(α) with φ f = λφ.A linearizer extends to a holomorphic, locally finite branched covering φ : B′(α) −→ C
(where B′(α) is the connected component of B(α) containing α). A linearizer on B′(α)is unique up to multiplication by a non-zero complex number.
Please refer the upper figure of Figure 1, as well as Figure 2 for the following definitions.
Definition of U0 and L0 in the case λ ∈ D∗. There is a unique domain U0 ⊂ B(α)
containing α and characterized by being the largest set which is mapped univalently bya linearizer φ onto a round disc centered at 0. Define L0 as the connected componentof f−1(f(U0)) containing α. It is a pinched closed disk. The sets U0, L0 are evidentlyindependent of the choice of φ. For a choice of φ denote by ψ the local inverse of φ,defined on φ(U0) and mapping 0 to α.
Definition of c0, v0 and normalization of the linearizer. In case λ = 0, α is also acritical point. Set c0 = α. In case λ ∈ D∗, ∂U0 contains at least one critical point. Wechoose one of them and name it by c0, it is a first attracted critical point. Let v0 = f(c0) be
4

the corresponding critical value. It is contained in U0. Unless explicitly stated otherwisewe shall assume φ is normalized so that φ(c0) = 1 and hence U0 = ψ(D) and v0 = ψ(λ).
Definition of the (filled) potential function κ in case λ ∈ D∗. The Schröderpotential function is the sub-harmonic function κ : B′(α) −→ [−∞,∞[ defined by
κ(z) =log |φ(z)|
log 1|λ|
.
It satisfies κ(f(z)) = κ(z)− 1 and κ(α) = −∞ as well as κ(z) = −∞ for any preimagez of α. For t ∈ R we let U(t) denote the connected component of κ−1([−∞, t[) contain-ing α and similarly L(t) denote the connected component of κ−1([−∞, t]) containing αor equivalently L(t) = ∩s>tU(s). Each U(t) is a Jordan domain, contained in the com-pact subset L(t) ⊂ B′(α). We have U(t) = L(t) if and only if ∂U(t) does not contain a(pre)critical point for f . Note that U(0) (resp. L(0)) coincides with U0 (resp. L0) pre-viously defined, due to our normalization of φ. The Milnor filled potential functionκ : B′(α) −→ [−∞,∞[ is defined by
κ(z) = infs|z ∈ U(s).
It has the virtue κ−1([−∞, t[) = U(t) = f(U(t+ 1)), κ−1([−∞, t]) = L(t) = f(L(t+ 1)),κ−1(t) = L(t) r U(t). It is sub-harmonic with α as its sole pole.
Consider the family of quadratic polynomials Qλ(z) = λz + z2 and the family of cubicpolynomials Pa(z) = Pλ,a(z) = λz +
√az2 + z3. For λ ∈ D the point α = 0 is a
(super)attracting fixed point for both Qλ and Pa. Denote by Bλ (resp. Ba) the attractingbasin of 0 for Qλ (resp. for Pa). Objects (such as φ, ψ, U0, c0, v0 etc) with a subscript λwill be those related to Qλ, and those with a subscript a will be related to Pa. Howeverwe omit the superscript 0 on c0λ and v0
λ since they are unique, in particular cλ = −λ2
andφλ(cλ) = 1. For the special parameter λ = 0 we define φ0 = ψ0 = id. Recall that
H = a | B′a
= Ba contains both finite critical points of Pa .
Set H∗ = Hr 0 and H∗0 = H0 r 0.
Definition of co0a
and c1a. For a ∈ H∗ the critical point labelled c0
ais the choice (gener-
ically the unique choice) of a first attracted critical point. The other critical point islabelled c1
a. We denote by co0
a, the co-critical point of c0
a, that is the unique point with
Pa(co0a) = Pa(c
0a) for which co0
a6= c0
aif and only if c0
a6= c1
aand co0
a= c0
aif and only if
c0a
= c1a
is a double critical point.
Definition of t1a, Ua and La. Assume at first λ 6= 0. For a ∈ HrH0 define t1
a= κa(c
1a),
Ua = Ua(t1a) and La = La(t
1a). Note that c1
a∈ L0
aiff t1
a= 0. Assume now λ = 0. For
a ∈ H∗0 and φa the unique Böttcher coordinate, define t1
a= log |φa(c
1a)|, Ua ⊂ Ba to
be the largest set mapped univalently by φa to a round disc, and La = Ua. Necessarilyφa(Ua) = D(0, et1a). For a = 0, set t1
a= −∞, Ua = ∅ and La = 0. Define ψ0 = id and
L0(t) = D(0, et).
For a ∈ H∗0 define Ωa = Ua, then ηa = ψ0 φa = φa : Ωa −→ L0(t
1a) is a homeomorphic
conjugacy, which extends to a holomorphic semi-conjugacy on a neighborhood of Ωa. Thefollowing Proposition extends this idea to the case λ ∈ D∗.
5

Proposition 1 For a ∈ HrH0, the local conjugacy ηa := ψλφa from Pa toQλ extends toa continuous surjective semi-conjugacy ηa : Ωa −→ Lλ(t
1a), where Ωa is a closed, connected
and simply connected set with Ua∪c1a ⊂ Ωa ⊂ La. Moreover ηa extends holomorphicallyto a neighborhood of Ωa r co0
a and κλ(ηa(c
1a)) = t1
a= κa(c
1a).
The map a 7→ ηa(c1a) takes values in Bλ r U0
λ . It is single-valued if c1a/∈ ∂U0
a, and
double-valued if c1a∈ ∂U0
aand φa(c
1a) 6= ±1 (due to the two ways of labeling c0
aand c1
a).
In the later case its two values z0, z1 belong to ∂U0λ and satisfy φλ(z0) · φλ(z1) = 1.
This proposition will be proved in the next section, where more details on Ωa is alsoprovided.
We want to use a 7→ ηa(c1a) to parametrize H. In order to turn this multi-valued
function into a single valued one, we define an equivalence relation ∼λ on C r U0λ (see
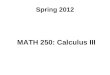
Figure 1) by:
λ ∈ D∗ , z1 ∼λ z2 ⇔ [z1 = z2] or [(z1, z2 ∈ ∂U0λ) and (φλ(z1) = φλ(z2))] ;
λ = 0 , ∼λ is trivial.
Note that ∼λ can be given an intrinsic meaning, depending only on ∂U0λ (but not on the
normalization of φλ).
(Incidentally, ∼λ can be also thought of as an equivalence relation on C, where z1 ∼λ
z2 ⇔ [z1 = z2] or [(z1, z2 ∈ U0λ) and Re(φλ(z1)) = Re(φλ(z2))], thus eliminating the need
for the excision of U0λ .)
Define U0 = (λ, z)|λ ∈ D∗ and z ∈ U0λ and an equivalence relation on D×C \ U0 as
follows(λ1, z1) ∼ (λ2, z2)⇔ (λ1 = λ2) and (z1 ∼λ1
z2) .
Let Π : D×C\U0−→(D×C\U0)/ ∼ denote the natural projection, and let πλ denoteits restriction to the λ-slice.
Definition 2X = Π(D× C \ U0) the cut-glued space,Y = Π(B \ U0) the cut-glued basin,Γ = Π(∂U0) the scar.
Denote by Xλ := Π(λ×C\Uλ),Yλ := Π(λ×Bλ \Uλ) and Γλ := Π(λ×∂Uλ), λ 6= 0and Γ0 := Π(0, 0) the corresponding slices related to λ × C. Set X ∗ := X \ Π(0),Y∗ = Y r Π(0).
These spaces comes naturally with the (Hausdorff) quotient topology. The space X(and Y ⊂ X ) has a canonical complex structure off Γ for which Π is holomorphic.
We may now restate Theorem A:
Theorem A’ (modelization).a) The space X equipped with the quotient topology is Hausdorff, Π(0) ∈ Y and Y is openin X .b1) X is a 2-dimensional complex manifold.b2) X is isomorphic to D × C, with the isomorphism commuting with the projection tothe λ coordinate.
6

πλ
Γλ
cλU0λ
Figure 1: The sets U0λ , L0
λ (the closed set bounded by the figure eight) and the cut-glue operation.
c) The map Φ : H −→ Y :
0 7→ Π(0)
a 7→ Π(λ, ηa(c1a)) for a 6= 0
is a well defined bi-holomorphic
homeomorphism.
Part a) is trivial. Parts b1) and c) are proved in §2-5, in the following way: We firstprove that there is a natural complex structure on X ∗ (and therefore on the open setY∗). We then show that Φ is a homeomorphism, mapping 0 to Π(0) and is analyticfrom H∗ onto Y∗. This completes the atlas on X and gives both b1) and c). We thenprove Theorem B using a result of Faught-Roesch together with Słodkovski extensions ofholomorphic motions. It is the content of §6. Finally we establish part b2) of TheoremA’ as a consequence of Theorem B.
2 Definition of Ωa and extension of ηa
The main purpose of this section is to prove Proposition 1. We shall however also introducesome auxiliary notions and some preliminary results which will serve also in subsequentsections.
The following properties of the sets Lλ(s) are easily verified. For later reference we
7

state them as a Lemma, whose proof we leave for the reader.
Lemma 3 (structure of Lλ(s)) Assume λ ∈ D∗.
• For s ∈ R, the set Uλ(s) is a closed Jordan domain.
• For s /∈ N, Lλ(s) = Uλ(s).
• For s ∈ N (starting from s = 0), Uλ(n) ⊆ Lλ(n) and Lλ(n) r Uλ(n) consists of 2n
components each one attached to Uλ(n) by a point in Q−nλ (cλ).
• In particular, Lλ(0) is bounded by a figure eight whose branching point is the criticalpoint cλ.
• The restrictions Qλ : Uλ(s)→ Uλ(s− 1) are homeomorphisms for s ≤ 0 and cover-ings of degree two branched over vλ for s > 0; the restrictions Qλ : Lλ(s)→ Lλ(s−1)are homeomorphisms for s < 0 and coverings of degree two branched over vλ fors ≥ 0.
The following Lemmas show that the structure of La(s) is biholomorphically the sameas the structure of Lλ(s), when s < t1
a:= κa(c
1a).
Lemma 4 (local bi-holomorphic conjugacy) For a = (λ, a) ∈ H r H0 the conformalisomorphism
ηa := ψλ φa : U0a−→ U0
λ
satisfies ηa(v0a) = vλ and ηa Pa = Qλ ηa on U0
a. It continuously extends to a semi-
conjugacy ηa : L0a−→ L0
λ, is analytic on a neighborhood of L0a
r co0a, and is unique if
c0a6= co0
a. We have c0
a= co0
aiff c1
a= c0
a, and co0
a∈ L0
aiff c1
a∈ L0
a. It is a conjugacy if
t1a> 0.
The proof is easy and is left to the reader. See Figure 2 for a schematic illustration.
We want to extend ηa further if c1a/∈ L0
a(i.e t1
a> 0). For the rest of this section we
shall omit a as a subscript.
Lemma 5 For a ∈ HrH0 the local conjugacy η has a unique bi-holomorphic extensionη : U = U(t1) −→ Uλ(t
1) where t1 = max0, κ(v1) + 1.
Proof : By construction the local conjugacy η : U(0) −→ Uλ(0) is bi-holomorphic andpreserves critical values: η(P (c0)) = Qλ(cλ). Write t = κ(v1). If t ≤ −1 then c1 ∈L(0) \ U(0), hence t1 = 0 and the conclusion of the lemma holds.
Suppose t > −1 and let n be the unique integer with n − 1 ≤ t < n. Then therestriction P : U(n) −→ U(n− 1) has degree 2 and hence we can extend η recursivelyto unique bi-holomorphic conjugacies η : U(k) −→ Uλ(k) by lifting η P on U(k) to Qλ
on Uλ(k) for k = 0 · · ·n. The degree of P : U(t+ 1) −→ U(t) is 2 and the degree ofP : U(s + 1) −→ U(s) is 3 for any s > t, because v1 ∈ U(s) \ U(t) for any such s. Itfollows from the latter that t1 ≤ 1+ t. And it follows from the former that we can extendη to a uniquely determined bi-holomorphic conjugacy η : U(t+ 1) −→ Uλ(t+ 1) by lifting
8

as above. Hence 0 < t+ 1 ≤ t1. q.e.d.
The bi-holomorphic conjugacy above extends uniquely as a homeomorphic conjugacyof the closures η : U(t1) −→ Uλ(t1), because both the open sets U(t1) and Uλ(t
1) areJordan domains. Moreover this extension is (except when co0 ∈ ∂U(t1), or equivalentlyc1 ∈ ∂U (t1)) locally the restriction of a holomorphic function.
(c0, 0), U(t)η−→ Uλ(t), (cλ, 0) L(t)
η−→ Lλ(t)
P ↓ ↓ Qλ and P ↓ ↓ Qλ
(v0, 0), U(t− 1)η−→ Uλ(t− 1), (vλ, 0) L(t− 1)
η−→ Lλ(t− 1)for t ≤ t1 for t < t1
Proof of Proposition 1
We shall construct Ω and η.
Case 0. λ = 0. We take Ω = Ua then η = φ : Ω −→ D(0, et1) is a homeomorphism, whichis the restriction of an analytic map.
Assume from now on λ 6= 0.
Recall that we are looking for a closed, connected, simply connected set Ω such thatc1 ∈ Ω, U(t1) ⊆ Ω ⊆ L(t1), and such that the following diagram commutes:
Ωη−→ Lλ(t
1)
P ↓ ↓ Qλ
L(t1 − 1)η−→ Lλ(t
1 − 1)
.
Recall also that U = U(t1), U(0) = U0 and L(0) = L0.
Case 1. t1 = 0. We take Ω = L(0) = L0. Then η has a continuous extensionη : Ω −→ Lλ(t
1), which is analytic except at the boundary point co0 of Ω. Its valueat c1 is uniquely determined.
Case 2. t1 > 0 and c1 ∈ U(t1) = U . Then c1 is a separating point for L(t1) and thecritical value v1 is a point in ∂L(t1 − 1). Let coΩ denote the connected component ofP−1(L(t1 − 1) r v1) containing the co-critical point co0. Define Ω = L(t1) r coΩ, thenη P : Ω −→ Lλ(t
1 − 1) ⊂ U(t1) has a unique lift η : Ω −→ Lλ(t1) to Qλ, extending η to
U(t1).
Case 3. t1 > 0 and c1 /∈ U(t1). In this case the truncation of L(t1) is slightly more deli-cate: We have t1 = n > 0 an integer, c1 ∈ L(n) r U(n) and v1 ∈ L(n− 1) r U(n− 1) byLemma 5. The first attracted critical point c0 is a separation point for L(0), i.e. L(0) r c0has two components. It follows by induction that form ≤ n there are 2m points of P−m(c0)on the boundary of U(m) and for m < n they are precisely the separation points of L(m).Let w0 be the separation point of L(n− 1) which separates 0 from the critical value v1
and let L′(n− 1) denote the connected component of L(n− 1) r w0 containing 0. More-over let coΩ denote the connected component of P−1(L′(n− 1)) containing co0. We setΩ = L(n) r coΩ. Then η P : Ω −→ Lλ(n− 1) ⊂ U(n) has a unique lift η : Ω −→ Lλ(n)
9

L(n)
Case 1, t1 = 0.
0
L(n)
L(n− 1) L(n− 1)
w0 w0
v1
w1 c1
w1
00
c1
c0
c1
v1
c1 ∈ ∂U(t1)
c1c0c00 0
L(n)
L(n− 1)L(n− 1)v1
L(n)
v1
c1
c1c1
c1 /∈ ∂U(t1).
t1 = n
Case 3, t1 = n > 0, c1 /∈ ∂U(t1).
co0
co0
0 c0 = c1 = co0
t1 /∈ N
co0
co0
co0
co0 co0
t1 = n
Case 2, t1 > 0 and c1 ∈ ∂U(t1)
(1.1)(1.2)
(1.3)(1.4)
(2.1) (2.2) (2.3)
(3.2)(3.1)
co0c1
Figure 2: The set Ω is the closed region bounded by the solid curves. We have coΩ = L(n) \ Ωand co0 /∈ Ω in cases 2 and 3, and coΩ = ∅ and co0 ∈ ∂Ω in case 1.
10

to Qλ, extending η on U(n). This extension is locally the restriction of a holomorphicfunction.
This ends the construction of Ω and η.
Clearly c1 /∈ ∂U0 if and only if c0 is the unique first attracted critical point anda 7→ ηa(c
1a) is single valued. Thus suppose a is such that both critical points belongs to
∂U0, and let z0 and z1 denote the two values of η(c1) = ψλ φ(c1) ∈ ∂U0λ . That is fix
a labelling c0, c1 of the critical points and let φ0, φ1 denote the two normalizations of φwith φi(c
i) = 1 for i = 0, 1, then zi = ηi(c1−i) = ψλ φi(c
1−i) and φλ(zi) = φi(c1−i),
i = 0, 1. Moreover φ1 = ρ · φ0 for some ρ of modulus 1. In particular ρ = ρ · 1 = φλ(z1)and ρ · φλ(z0) = 1. So φλ(z1) · φλ(z0) = 1.
Finally κλ(ηa(c1a)) = t1
a= κa(c
1a) follows from the constructions above. This ends the
proof of Proposition 1.
Corollary 6 The map Φ : H −→ Y , 0 7→ Π(0) and a 7→ Π(λ, ηa(c1a)) is well defined.
Moreover if a 6= 0 then Φ(a) 6= Π(0).
Proof : The only ambiguity in the definition of Φ occurs when ∂U0a
contains two distinctcritical points. In this case different choices of the labeling c0
a, c1
alead to two different maps
ηa and to two values z0, z1 for ηa(c1a), with φλ(z1) ·φλ(z0) = 1. So Π(λ, z0) = Π(λ, z1), andis independent of the choices involved. Hence Φ is well defined.
Clearly Φ(a) 6= Π(0) if a 6= 0, and Φ(H) ⊂ Y . q.e.d.
3 Analyticity of the map (a, z) 7→ ηa(z).
The purpose of this section is to prove Proposition 10 below. For this we will rely on aresult of Petersen (Proposition 7 below).
For a = (0, a) ∈ H∗0 define the potential function ga : Ba → [−∞, 0 [ by ga(z) = log |φa(z)|
near 0, and extend it to the entire basin by the recursive relation
ga(z) = ga(Pa(z))/2. (3.1)
For t ∈ R− let Ua(t) denote the connected component of g−1a
([−∞, t[) containing 0. Definealso the filled potential
ga(z) = infs|z ∈ Ua(s).Then t1
a= ga(c
1a), Ua = Ua(t
1a) and Ωa = Ua(t1a).
Define
F := Φ−1(Γ) = 0 ∪ a ∈ HrH0 | both critical points are on ∂U0a
and Fλ = F ∩Hλ. Set
U = (λ, a, z)|a = (λ, a) ∈ Hr F and z ∈ Ua .
Proposition 7 The set U is open in C3 and the map (a, z) 7→ ηa(z) is complex analyticon U .
11

Proof : See Petersen [Pe], where the Proposition is proved for the family Pλ,b(z) =λz + bz2 + z3, which double covers the family Pa, and there is no obstruction to passingthe result to the quotient, because we are avoiding the parameters in F . q.e.d.
Definition. In case λ 6= 0 and t1a> 0 set pCλ = Qn
λ(cλ)|n ≥ 1, pCa = P na(c0
a)|n ≥ 1
and copCa = P−1a
(pCa) r L0a. The last two sets depend analytically on a.
Lemma 8 Fix a ∈ H with λ 6= 0 and t1a> 0. Let X ⊂ Ba(0) r copCa be any simply
connected forward invariant (Pa(X) ⊂ X) domain, with Ua(T ) ⊂ X for some 0 < T ≤ t1a.
Then the restriction of ηa to U0a
has an analytic extension η to X satisfying η Pa =Qλη. This extension is uniquely determined byX, but in general depends onX. Howeverif η(X) ⊂ Uλ(t
1a), then X ⊂ Ua(t
1a) and η = ηa on X. And inversely if Ua(t) ⊂ X for
some 0 < t ≤ t1a, then ηa = η on Ua(t). Furthermore if Ωa ⊂ X then ηa = η on Ωa.
Let us remark that η has no continuous extension to a neighborhood of co0a
as a semi-conjugacy: Assume at first co0
a6= c0
a. Then Pa is locally univalent around co0
a. But
ηa(Pa(co0a)) = vλ and ηa is locally univalent at P (co0
a), and vλ has a unique preimage by
Qλ which is cλ, around which Qλ is non-univalent. The other case co0a
= c0a
is similar (Pa
is locally of degree 3 this time).
Proof : Uniqueness comes from the uniqueness of analytic continuations on simplyconnected domains. In the following we omit the subscript a for simplicity.
For t ∈ R define Xt as the connected component of U(t)∩X containing 0. Then eachXt is a simply connected forward invariant domain (in fact P (Xt) ⊆ Xt−1 ⊆ Xt) andXt ∩ copC = ∅. We define η = η on X0 = U(0) and will define η recursively on Xn, n ≥ 0as the unique lift of η P on Xn to Qλ fixing 0.
In order to get the existence of the lifting, we make use of the following classical result(see for example Massey [Ma]):
Lemma 9 Let Y, Z,W be path connected and locally path connected Hausdorff spaceswith base points y ∈ Y, z ∈ Z and w ∈W . Suppose p : W → Y is an unbranched coveringand f : Z → Y is a continuous map such that f(z) = y = p(w).
Z, zf−→ W,w
f ց ↓ pY, y
Then there exists a continuous lift f of f to p with f(z) = w if and only if
f∗(π1(Z, z)) ⊂ p∗(π1(W,w)) , (3.2)
where π1 denotes the fundamental group. This lift is unique.
By assumption U(T ) ⊂ X for some 0 < T ≤ t1 and by Lemma 5 the conjugacy η hasa bi-holomorphic extension η : U(T ) −→ Uλ(T ). We shall prove by induction on n ≥ Tthat η has a unique analytic extension to Xn, with η−1(pCλ) = pC ⊂ U0.
12

Suppose that η is analytically extended to Xn−1 with η−1(η(pC)) = pC ⊂ U0 andsuppose n ≥ T . We want to prove that there exists a lift η of the analytic, hencecontinuous map η P on Xn to Qλ extending η. Moreover we want to show that η isinjective above pCλ, i.e. η−1(pCλ) = pC ⊂ U0.
Xn \ c0 eη−→ Bλ \ cλP ↓ ↓ Qλ
Xn−1 \ v0 bη−→ Bλ \ vλ
.
We set all base points to be 0. Any closed loop γ in Xn \ c0 is homotopic to a closedloop γ′ in U(T ) \ c0, because Xn is simply connected and contains U(T ), for whichc0 is an interior point. Thus (η P )∗(π1(Xn \ c0, 0)) = (η P )∗(π1(U(T ) \ c0, 0)) ⊂(Qλ)∗(π1(Bλ \ cλ, 0)) is satisfied, by the pure existence of η. Hence the lift η fixing 0exists and is unique. In particular η = η on the connected subset Xn−1rc0 ⊂ Xnrc0,hence extends to a continuous map on Xn. To see that η−1 is injective above pCλ, wenote that since η is injective above pCλ, we have η(z) ∈ pCλ if and only if z ∈ P−1(pC).However since η = η is injective on L0 ⊂ U(T ), we have either z ∈ pC or z ∈ copC.By assumption however copC ∩ Xn = ∅. Thus η is injective above pCλ. In particularη(Xn \ v0) ⊂ Bλ \ vλ and we can continue the induction. q.e.d.
Proposition 10 The set Ωa varies upper-semi-continuously for a ∈ H∗ for the Hausdorfftopology. The map a 7→ ηa(c
1a) is analytic on Hr F .
Proof : Semi-continuity of Ωa. This is carried out by inspecting each case in Figure 2(and using Proposition 7 for the case λ = 0).
Assume λ 6= 0. Suppose at first that t1a> 0. Choose an open connected and simply
connected neighborhood X of Ωa with Pa(X) ⊂ Ua(t1a− 1
2) and with copCa∩X = ∅. There
exists a neighborhood Λ of a such that for all a′ ∈ Λ we have Pa′(X) ⊂ Ua′(t1
a′) = Ua′ ,Ωa′ ⊂ X and copCa′∩X = ∅, because Ωa′ varies upper semi-continuously and copCa′ variescontinuously with a
′ for the Hausdorff metric on compact subsets. Lemma 8 implies thatfor every a
′ ∈ Λ the map ηa′ has a unique analytic extension ηa′ to X, which agrees withηa′ on Ωa′. We need to prove that these lifts define a continuous and hence analytic map.
Denote by p1 the projection a′ = (λ′, a′) 7→ λ′.
⋃a′∈Λ(a′, X r c0
a′) (p1, eηa′
)−→ ⋃a′∈D∗(λ′, Bλ′ r cλ′)
(id, Pa′) ↓ ↓ (id, Qλ′)
⋃a′∈Λ(a′, Ua′ r v0
a′) (p1, ηa′
)−→ ⋃a′∈D∗(λ′, Bλ′ r vλ′)
.
Here we set the base points to be (a, 0) for the left hand sets, and (λ, 0) for the right handsets. By Proposition 7, the map (p1, ηa′) is analytic, therefore continuous. The right handmap is a covering. Now any loop in
⋃a′∈Λ(a′, X r c0
a′) based at (a, 0) is homotopic toa loop on the slice a
′ = a. So the condition (3.2) is satisfied due to the existence of ηa.Thus we can apply Lemma 9 to obtain a continuous lift in the above diagram, obviouslyin the form (p1, ηa′). Using the uniqueness of lifts on each slice, we get ηa′ = ηa′.
13

This implies that (a′, z)→ ηa′(z) on Λ×X is continuous, and analytic on each variable,therefore analytic on the joint variable (a′, z). In particular a
′ 7→ ηa′(c1a′) = ηa′(c1
a′) isanalytic.
Suppose next that t1a
= 0 and c1a∈ L0
ar U0
a. Then for ǫ > 0 sufficiently small the set
Ωa r D(co0a′, ǫ) is a connected closed set containing U0
aand c1
a. Using a similar argument
as above with a sufficiently small neighborhood X of this set we may conclude similarly.
Case λ = 0. Choose a connected and simply connected neighborhood X of Ωa withco0
a/∈ X. Then the same argument as above works. q.e.d.
4 The natural complex structure of X r 0Let Γ = (λ, z), z ∈ U0
λ ∪ 0. Then the restriction Π : D× (C r Γ) −→ X r Γ is ahomeomorphism of open sets. Thus it defines a complex analytic structure A on X r Γ.We will show that this complex structure is in fact the restriction of a complex analyticstructure on X ∗ = X r Π(0):
Proposition 11 The space X ∗ has a complex analytic structure A∗ containing A. More-over this structure gives each fiber Xλ := Π(λ, z)|z ∈ C a unique complex structure andthe corresponding Riemann surface is isomorphic to C.
Proof : We prove first that each fiber Xλ, λ ∈ D has a unique complex structurecontaining the chart π−1
λ : Xλ r Γλ −→ C, which is complex analytic for the structure A.
For λ = 0, the map π−10 : X0 −→ C is a homeomorphism, and thus a global chart.
Fix now λ ∈ D∗. We define a chart kλ on Wλ := πλ(Uλ(1)), a neighborhood of Γλ asfollows:
Uλ(1) r U0λ
θλ→ C r Uf−→ C r D
φλ ց ւg
πλ ↓ C ⊃ D( 1|λ|) ⊃ D ↓ h
Wλkλ−→ C
We will use a model double cover g : C −→ C which is the quadratic polynomialg(z) = −z2 + 1. Note that g has critical point at 0, with critical value at 1, and g(−1) = 0.
The restriction φλ : Uλ(1) −→ D(1/|λ|) is proper of degree 2 and with critical pointcλ and critical value 1. There is thus a univalent lift θλ : Uλ(1) −→ C of φλ to g withθλ(cλ) = 0 and θλ(0) = −1.
Denote by U the connected component of g−1(D) containing −1. Then θλ(U0λ) = U .
Let f : C r U −→ C r D with f(∞) = ∞ be the homeomorphically extended Riemannmap normalized by f(0) = 1. Then f(z1) = f(z2) ∈ S1 for z1, z2 ∈ ∂U with g(z1) = g(z2),because both g and f have only real coefficients. Denote by h the branched doublecovering h(z) = z + 1/z : C −→ C. It satisfies h(z) = h(1/z) for all z, and in particular
14

h(z) = h(z) whenever z ∈ S1. The map
kλ := h f θλ π−1λ : Wλ −→ C (4.1)
is a well defined homeomorphism onto its image. Moreover the compositionkλ πλ = h f θλ : Uλ(1) r U0
λ −→ C r [−2, 2]
is holomorphic. Hence the two charts kλ and π−1λ together define a complex analytic atlas
on Xλ.
Finally let χ : ω −→ C be a chart for a complex structure on Xλ and suppose χ πλ isholomorphic on π−1
λ (ω) r ∂U0λ . Then χ k−1
λ is continuous where defined and holomorphicon kλ(ω) r [−2, 2]. But then it is holomophic on all of kλ(ω) by Morera’s theorem. Thusχ is in the atlas defined by kλ. This proves the uniqueness of the complex structure onXλ containing the chart π−1
λ on Xλ r Γλ.
It remains to be proved that the complex structures on the fibers line up to forma complex structure on X ∗. The set W := ∪λ∈D∗λ ×Wλ is an open neighborhood ofΓ∗ = Γ r Π(0). Moreover K : W −→ C2 given by K(λ, z) = (λ, kλ(z)) is a homeomor-phism onto its image, because the map (λ, z) 7→ kλ(z) is continuous on W and a homeo-morphism of Wλ onto its image for each fixed λ ∈ D∗.
Finally the composition
K Π :⋃
λ∈D∗
λ ×(Uλ(1) r Uλ(0)
)−→ C
2
is holomorphic. Thus K and Π−1 together define a complex analytic atlas on X ∗. q.e.d.
5 Proof of Theorem A’
Injectivity of Φ (rigidity), a lifting process
· · · CP1−→ C
P1−→ C ⊃ Ω1P1−→ P1(Ω1)η1
ցη1
ւ· · · h2 ↓ h1 ↓ h0 ↓ h0 ↓ Lλ(t) ↓ h0
η2
րη2
տ· · · C
P2−→ CP2−→ C ⊃ Ω2
P2−→ P2(Ω2)
Given any two (in the following fixed) points a1 = (λ1, a1) and a2 = (λ2, a2) withΦ(a1) = Φ(a2), we shall prove that a1 = a2. To reduce notation we use the indices1, 2 for all the involved quantities. In particular P1 = Pa1
and P2 = Pa2. It follows
immediately that λ1 = λ2 = λ and by Proposition 1 that t := t1a1
= κλ(η1(c11)) = κλ(z) =
κλ(η2(c12)) = t1
a2. Hence also η1(Ω1) = η2(Ω2) = Lλ(t). Possibly exchanging the labels of
c02 and c12, we can assume that η1(c11) = z = η2(c
12), and Φ(a1) = Φ(a2) = Π(λ, z).
The injectivity of Φ on H0 is proved by Milnor. The proof in the case λ 6= 0 is similar,the core is the so called pull-back argument. We shall however go through the details.We shall recursively define quasi conformal maps hn, which are conformal on larger and
15

larger domains. Extracting a convergent subsequence will provide a conformal conjugacybetween P1 and P2.
Definition of h|Ω1. We claim that there exists a homeomorphic conjugacy h : Ω1 −→ Ω2
of P1 to P2, such that h is the restriction of a bi-holomorphic conjugacy between neigh-borhoods of the two sets.
Assume at first t = t1a1
= t1a2
is not an integer. Then both Ω1 and Ω2 are closed Jordandomains. Set h = η−1
2 η1, it is a well defined homeomorphism and maps c11 ∈ ∂U1(t) toc12 ∈ ∂U2(t).
Assume next t = n ≥ 0. Note that Lλ(n) r Uλ(n) consists of 2n components, each oneis attached to Uλ(n) by a point in Qλ
−n(cλ). Each component, except the one containingz, is homeomorphically covered under each of the maps η1 and η2 by similar componentsof Ωi r Ui(n), i = 1, 2. The component containing z is however double covered underboth maps with z as critical value and ci as resp. critical points. Thus the existence of hfollows also in this case. This proves the claim.
Extension of h. We shall extend h to a homeomorphism h : L1(t) −→ L2(t) conjugatingP1 to P2. For this we remark first that Li(t) = Ωi ∪ coΩi, where the sets coΩi, i =1, 2 were defined in the proof of Proposition 1. And secondly that ηi Pi maps coΩi
homeomorphically onto a common image. The existence of the homeomorphic extensioneasily follows.
Denote by Ai the annuli Ui(t+1)rLi(t) and by Bi the annuli Ui(t)rLi(t−1), i = 1, 2.Then Pi : Ai −→ Bi are covering maps of degree 3. Moreover by the above the restrictionh|B1
: B1 −→ B2 is a homeomorphism and a conformal isomorphism of the annuli. Alsothe restriction h|∂L1
: ∂L1 −→ ∂L2 is a homeomorphism. It easily follows that h P1 onA1 has a unique homeomorphic (bi-holomorphic) lift to P2 extending h on L1(t). Oneway to see this is to uniformize the annuli as round annuli with concentric boundaries andtransport the maps to the uniformized annuli, trivially solve the problem and transportthe solution back. Since all the involved maps are continuous on the closures and allboundaries are locally connected, continuity and hence analyticity of h on ∂L1 is assured.
Definition of h0. Fix a smooth equipotential κ−11 (T ) with t < T < t + 1 and define
h0 := h on the domain U1(T ) inside this equipotential. Then κ−12 (T ) is also smooth
bounding a domain U2(T ) and h0 := h : U1(T ) −→ U2(T ) is a bi-holomorphic conjugacy.
For i = 1, 2 fix neighborhoods Vi = φ−1i,∞(CrD(R)) of infinity, where φi,∞ are Böttcher
coordinates at infinity and R > 1. Define h0 := φ−12,∞ φ1,∞ : V1 −→ V2. Extend h0 to a
global quasi conformal homeomorphism of C, by a, say C1 homeomorphism between thetwo remaining annuli.
Our map h0 is now globally defined and is conformal on the forward invariant domainsV1 and U1(T ).
The lifting h1. We claim that there is a homeomorphism h1 : C→ C such that1) P2 h1 = h0 P1, i.e.
Ch1−→ C
P1 ↓ ↓ P2
C −→h0
C
2) h1 restricted to P−11 (V1 ∪ U1(T )) is holomorphic,
16

3) h1|U1(T ) = h0|U1(T ),4) h1 is isotopic to h0 relative to the postcritical set of P1.
(This is to say that P1 and P2 are c-equivalent, a notion that generalizes Thurston’scombinatorial equivalence to postcritically infinite hyperbolic maps. See [CJS] and [CT]for a detailed study of the notion.)
Proof. We want to apply Lemma 9 to h0 P1. Notice that for i = 1, 2, the restric-tions Pi : C r P−1
i (v0i , v
1i ) −→ C r v0
i , v1i are covering maps. Set Z := U1(T ) r
P−11 (v0
1, v11). Now any loop based at 0 in C r P−1
1 (v01, v
11) is homotopic to a loop
based at 0 in Z. This means that π1(C r P−11 (v0
1, v11), 0) is canonically identified with
π1(Z, 0).
The map h0 restricted to Z satisfies P2 h0 = h0 P1 and h0(0) = 0. So
(h0 P1)∗π1(C r P−11 (v0
1, v11), 0) = (h0 P1)∗π1(Z, 0) =
= (P2 h0)∗π1(Z, 0) = P2∗π1(C r P−12 (v0
2, v12), 0) .
So we can apply Lemma 9 to h0 P1 to guarantee the existence of a continuous h1
satisfying 1) together with the base point condition h1(0) = 0.
By uniqueness of the lifting, we have also 3). The point 2) follows.
Now we may exchange the role of P1 and P2 to show that h1 has a continuous inversemap. In other words h1 is in fact a homeomorphism.
The postcritical set of P1 is contained in U1(T ) ∪ ∞. We will use the fact that ahomeomorphism on the closed unit disc D which is the identity on 0∪∂D, is isotopic tothe identity relative to 0∪∂D. This implies that h0 and h1 are isotopic rel U1(T )∪∞,in particular rel the postcritical set of P1. This proves 4) and ends the proof of the Claim.
Notice that we can not guarantee h1|V1= h0|V1
. And this fact is usually not true.
The subsequent liftings hn. From now on it follows from a general rigidity principle,see for example [Mc]. We may either apply a general theorem or redo the argument inour setting. We choose the latter option.
Define recursively hn : C −→ C for each n by P2 hn = hn−1 P1 and hn(0) = 0.
Each hn is quasi conformal with the same maximal dilatation K as h0 and satisfieshn = h0 on U1(T ) and that hn is conformal on P−n
1 (U1(T ) ∪ V1). The family (hn) is thusnormal. Let (hnk
) be a subsequence converging uniformly to some K-quasi conformalmap H : C −→ C. Notice that C r ∪nP
−n1 (U1(T ) ∪ V1) coincides with the Julia set J1 of
P1. Therefore H is conformal except possibly on J1. However J1 has Lebesgue measurezero, because P1 is hyperbolic (in fact J1 is a quasi-circle). Thus H is globally conformal.But since H = h0 on U1(T ) we have H P1 = P2 H on U1(T ). By the isolated zerotheorem of holomorphic maps we have actually H P1 = P2 H on C.
This shows that P1 and P2 are conformally conjugate.
Finally we have parametrized our family so that each conformal conjugacy class isrepresented only once. So a1 = a2.
Analyticity of Φ
Analyticity of Φ on H r (λ, 3λ), (λ, 0)|λ ∈ D.
17

From Proposition 10 we obtain immediately that Φ is complex analytic on HrF , asit is a composition of complex analytic maps.
As H r (λ, 3λ), (λ, 0)|λ ∈ D = (H r F) ⊔ (F r (λ, 0), (λ, 3λ)|λ ∈ D), it remainsto show the analyticity of Φ at a0 ∈ F r (λ, 0), (λ, 3λ), λ ∈ D. (The parameters (λ, 3λ)and (λ, 0) in F corresponds to maps with a double critical point, respective maps with asymmetry (commute with z 7→ −z).)
Denote by ϕa the linearizer of Pa at 0 normalized so that ϕ′a(0) = 1. Note that this
normalization does not depend on which critical point is the ’closest’, and is analytic onthe parameter a.
Recall that Pa(z) = z3 +√az2 + λz. The two critical points are: c±
a= (−√a ±√
a− 3λ)/3. Assume that a0 ∈ H and a0 6= (λ, 0), (λ, 3λ). Then the maps
a 7→ c−a, a 7→ c+
a, Σ+ : a 7→ ϕa(c
−a)
ϕa(c+a ), Σ− : a 7→ ϕa(c
+a)
ϕa(c−a )=
1
Σ+(a)
are locally holomorphic in a neighborhood of a0, as long as the denominators are non-zeroat a0. This is the case when a0 ∈ F , a0 6= (λ, 3λ), in which case Σk(a0) ∈ S1 r 1,k = +,−.
Assume now a0 ∈ Fr(λ, 0), (λ, 3λ), λ ∈ D. Then ϕa0(c+
a0) = reiθ+
, ϕa0(c−
a0) = reiθ−,
θ+ 6= θ−, and for k = +,−, the component of 0 in ϕ−1a0
(seiθk
, 0 ≤ s < r) reaches cka0
atone end.
Claim 1. There is a small polydisc neighborhood ∆ of a0 so that ϕa(cka) ∈ r
√|λ| <
|z| < r/√|λ| for k = +,−, the two points ϕa(c
ka), k = +,− are on distinct radial lines,
and for the half closed radial segment Kka
from 0 to ϕa(cka) (excluding ϕa(c
ka) but including
0), the component of 0 in ϕ−1a
(Kka) reaches ck
aat one end.
Proof. Only the last part is non-trivial. Fix k = + or −. Note at first cka
are simplecritical points of ϕa. Take Uk a small disc neighborhood of ck
a0such that ϕa0
has no othercritical points in Uk. This remains true for ϕa with a ∈ ∆ and ∆ small. By Rouché’stheorem ϕa(c
ka) has two preimages (counting with multiplicity) in Uk. But ck
ais one of
them, and it has multiplicity two. So it is in fact the only preimage. Similarly one canshow that the component of 0 in ϕ−1
a(Kk
a) ends in Uk and ends at a preimage of ϕa(c
ka).
By uniqueness, the end is cka.
Claim 2. Let h(z) = z + 1/z. For any a = (λ, a) ∈ ∆, we have
Φλ(a) = (h φλ π−1λ )−1(Σ+(a) + Σ−(a)) =
= (h φλ π−1λ )−1 h(Σ+(a)) = (h φλ π−1
λ )−1 h(Σ−(a)) .
Proof. For every λ ∈ D∗, one can find Rλ = 1/|λ| such that ψλ, the inverse of the linearizerφλ for Qλ (normalized so that φλ(cλ) = 1), has a univalent extension to D(Rλ) r [1, Rλ].Denote its image by U ′
λ. Set W ′λ = πλ(U
′λ). It is a neighborhood of Γλ r πλ(0). Then for
the complex structure of Xλ the map h φλ π−1λ maps W ′
λ univalently onto h(A′), whereA′ = z|1 ≤ |z| < Rλ, z /∈ R+. Therefore πλ ψλ h−1 = (h φλ π−1
λ )−1 maps h(A′)holomorphically onto W ′
λ, where h−1 : h(A′)→ A′ is the multi-valued function.
Fix a = (λ, a) ∈ ∆. For k = +,−, denote by φka
the linearizer that maps cka
to 1. Wehave φk
a(z) = ϕa(z)/ϕa(c
ka).
18

Now at least one of the critical points c±a
is the closest. Assume, say, it is c+a. Denote
by U ′a
the connected component of 0 in (φ+a)−1(D(Rλ) r [1, Rλ[). Then ηa = ψλ φ+
aon
U ′a. By Claim 1, c−
a∈ U ′
ar Ua. Therefore h φ+
a(c−
a) ∈ h(A′) and
Φλ(a) = πληa(c−a) = (πλψλh
−1)h(φ+a(c−
a)) = (h φλ π−1
λ )−1h(φ+a(c−
a)) ∈W ′
λ .
But h(φ+a(c−
a)) = h( ϕa(c−a )
ϕa(c+a )) = Σ+(a) + Σ−(a). We are done with Claim 2.
From Claim 2 it is clear that a 7→ Φλ(a) is analytic in ∆, as it is the composition ofanalytic functions.
This proves the analyticity of Φ(a) = (λ,Φλ(a)) in H r (λ, 0), (λ, 3λ)|λ ∈ D.Analyticity of Φ on H∗ := Hr 0.
Assume now λ ∈ D∗.
At first Φλ is holomorphic on Hλ r (λ, 0), (λ, 3λ). The two singularities are clearlyremovable (by boundedness). Therefore Φλ : Hλ → Yλ is holomorphic. Next Φ(a) is alsoholomorphic in λ on (λ, 3λ0), λ ∈ D a small disc about λ0, as it is so on the punctureddisc D r λ0 and the puncture is again removable. To get the analyticity at (λ, 0) wejust need to make the change of coordinates (λ, a) → (λ + a, a) and proceed as above.Therefore Φ|H∗ is holomorphic in each variable, hence holomorphic as a function of thetwo variables (λ, a).
Surjectivity of Φ.
It suffices to prove that for every λ ∈ D, the map Φλ : Hλ −→ Yλ is surjective. Forλ = 0 this was proved by Milnor.
Assume λ ∈ D∗. By the above Φλ : Hλ → Yλ is holomorphic. We just need to
show that Φλ is proper (as proper holomorphic maps over a connected domain are alwayssurjective). It is easily seen that Hλ is bounded in C and has therefore compact closure.Let an = (λ, an) ∈ Hλ be a sequence diverging to the boundary of Hλ. We need to provethat Φλ(an) ∈ Yλ diverges to the boundary of Yλ or equivalently that κλ(Φλ(an))→ +∞.Assume not and note that κλ(Φλ(an)) = κan
(c1an
) by the very definitions. Hence thereexists a subsequence ank
with κank(c1
ank
) uniformly bounded, say by some K > 0 and byrelative compactnes with ank
→ a′. We contend that κa′(c1
a′) ≤ K <∞ and thus a′ ∈ Hλ,
contradicting that an diverges to the boundary of Hλ. If κa′(c1a′) = 0 we are through so
assume not. Then c0an
k
converges to c0a′ and c1
ank
converges to c1a′. Hence the linearizers
φankconverge uniformly on compact subsets of Ba′ to φa′. But then also κank
convergeuniformly to κa′ on compact subsets of Ba′. Thus κan
k(c1
ank
)→ κa′(c1a′) ≤ K.
Bi-holomorphicity of Φ on H∗.
This follows from a general result about analytic and bijective maps (cf. [Ch], page53). However the fiber structures give a direct proof: On H r F , the map Π−1 Φ hasthe form (λ, a) 7→ (λ, ηa(c
1a)). So
Jac(Π−1 Φ) =
(1 0∗ d
daηa(c
1a)
).
As Φλ is univalent, ddaηa(c
1a) 6= 0. So the determinant of the Jacobian is non zero, i.e. Φ
is locally bi-holomorphic.
19

On F , the argument is similar, by locally uniformizing Y to a poly-disc (preservingthe fibers) via a bi-holomorphic map F and by studying the Jacobian of F Φ.
A consequence. The set Fλ coincides with Φ−1(Γλ), it is a real-analytic arc with end-points (λ, 3λ) and (λ, 0).
Continuity of Φ and Φ−1 at 0.
First the continuity of Φ. We proceed by contradiction. Assume that there is asequence an = (λn, an) → 0 such that Φ(an) → (0, b), b 6= 0. Then λn 6= 0 since Φ0 iscontinuous with Φ0 = 0, and (0, b) ∈ Y0.
Claim. We may assume that (0, b) ∈ Y0.
Proof. We may check by hand that Φ(λn, 3λn) → 0. Choose Kn ⊂ Hλna continuum
containing an and (λn, 3λn), such that Kn → 0 in the Hausdorff topology. Then asubsequence of Φ(Kn) converges to a continuum K in Y0. The set K contains 0 and(0, b). So K contains a point in Y0 r 0. End of the proof.
On the other hand, Φ : H∗ → Y∗ is bijective. So there is (0, a) with a 6= 0 such thatΦ(0, a) = (0, b). But Φ is also open near (0, a) thus maps a small neighborhood ∆ of(0, a) onto a neighborhood of (0, b). We may choose ∆ to avoid an for large n. Thesefacts together contradict the fact that Φ is injective.
Therefore Φ is continuous at 0, with Φ(0) = 0.
A similar argument shows that Φ−1 is continuous at 0.
Conclusion: Φ : H → Y is a homeomorphism, bi-holomorphic on H∗.
An atlas for X . On X r0 we use the natural complex structure given in the previoussection. On Y we use Φ−1 : Y → H ⊂ C2. Due to the analyticity of Φ on Hr 0 we geta collection of charts on X , making it a 2-dimensional complex variety.
This ends the proof of parts a),b1) and c) of Theorem A’.
The remaining part b2) follows from b1) by a general result about analytic varietiesfibered over D with fibers isomorphic to C. At the end of the next section we will alsoprovide a direct proof of b2).
6 The extension of Φ to Y. Proof of Theorem B
The objective here is to prove Theorem B, which claims that the biholomorphism Φ :H → Y extends to a homeomorphism Φ : HD → Y, where subscript D indicates theintersection with the cylinder above D.
Note that ∂Yλ is a quasi-circle and ∂Hλ is not (it contains many cusps pointingoutwards). We may thus conclude
Corollary 12 Φλ is not a quasi-conformal map for any λ ∈ D.
In order to prove the theorem we will need information from outside of H and Y .The essential tool we shall use is holomorphic motions, a notion developed by Sullivanand Thurston. A (classical) holomorphic motion of a set X ⊂ C over a complex analyticmanifold Λ is a mapping H : Λ× X→ Λ×C, (λ, z) 7→ (λ, h(λ, z)), such that
1. For all z ∈ X the map λ 7→ h(λ, z) =: hz(λ) is analytic on Λ.
20

2. For all λ ∈ Λ the map z 7→ h(λ, z) =: hλ(z) is injective on X.
3. The time 0 map h0 is the identity map.
Being a holomorphic motion is a strong property and holomorphic motions have someelementary properties which can be easily proved using normal family arguments, forexample that H has a unique extension as a holomorphic motion over Λ of the closure X
of X, and that H is continuous with respect to (λ, z). The next important property is thatfor each time λ the map hλ is (the restriction of a) quasi conformal (homeomorphism).Moreover if Λ = D then hλ is log(1+ |λ|)/(1−|λ|) quasi conformal. A far deeper propertyis however the celebrated Słodkovski theorem which states that a holomorphic motion ofsome set X over D extends to a holomorphic motion of all of C over the same disc D,the extension is by no means unique in the interior of the complement of X however. Fordetails, see for example [BR], [D1].
We shall use a slightly generalized definition of holomorphic motions. Let X be acomplex analytic manifold and p : X → Λ be a holomorphic projection. Denote by Xλ
the fiber p−1(λ). Let E ⊂ X0. A holomorphic motion of E over Λ into X isH : Λ×E → X ,(λ, z) 7→ H(λ, z) such that
1. For any fixed λ, H(λ, ·) is injective on E and maps E into Xλ.
2. For any fixed z ∈ E, H(·, z) is analytic.
3. H(0, ·) is the identity.
Fix Pλ,b(z) = z3 + bz2 + λz. Set a = b2. Denote by C0 the connectedness locusin (0, a), a ∈ C, by C the connected locus in (λ, a), (λ, a) ∈ D × C, and by Cc thecomplement (D×C)rC. We shall use the following ad hoc notation
√A = (λ, b) | (λ, b2) ∈
A whenever A ⊂ D×C.
Set b = (λ, b). For any Pb, define ϕb(z) to be its normalized Böttcher coordinates at∞, more precisely
ϕb(z) := limn→∞
(P nb(z))
1
3n = limn→∞
z
(Pb(z)
z3
) 1
3(P 2
b(z)
Pb(z)3
) 1
32
· · ·(P n+1
b(z)
P nb(z)3
) 1
3n+1
= z
∞∏
k=0
(P k+1
b(z)
P kb(z)3
) 1
3k+1
= z
∞∏
k=0
(1 +
b
P kb(z)
+λ
P kb(z)2
) 1
3k+1
.
For Qλ(z) = z2 + λz, define similarly
ϕλ(z) := limn→∞
(Qnλ(z))
1
2n = limn→∞
z
(Qλ(z)
z2
) 1
2(Q2
λ(z)
Qλ(z)2
) 1
22
· · ·(Qn+1
λ (z)
Qnλ(z)2
) 1
2n+1
= z
∞∏
k=0
(Qk+1
λ (z)
Qkλ(z)
2
) 1
2k+1
= z
∞∏
k=0
(1 +
λ
Qkλ(z)
) 1
2k+1
.
Denote by V = (λ, z), |λ| < 1, z ∈ Bcλ. Then
Lemma 13 The map (λ, z) 7→ (λ, ϕλ(z)) is a homeomorphism from V onto D × Dc andis bi-holomorphic in the interior. Its inverse map is denoted by Ψ. We have Bc
0 = C r D
and Ψ(0, z) ≡ (0, z).
21

Now Ψ : D×Bc0 → V is a bi-holomorphic map, in particular a holomorphic motion of
Bc0 = Dc.
For any (λ, b) with (λ, b2) ∈ Cc, there is a unique critical point c of Pλ,b in the basinof ∞. Denote by c′(λ, b) the co-critical point. Then ϕλ,b is well defined at c′(λ, b).
Proposition 14 The map√L : (λ, b) 7→ (λ, ϕλ,b(c
′(λ, b))) is bi-holomorphic from√Cc
onto D× Dc, odd with respect to b, and induces a bi-holomorphic map L : Cc → D× D
c.
In particular√L0 : (0, b) 7→ (0, ϕ0,b(c
′(0, b))) is bi-holomorphic from√Cc
0 onto Dc, odd
with respect to b, and induces a bi-holomorphic map : Cc0 → D
c.
For a proof see [B-H]. Define a bi-holomorphic mapM = L−1(Id×L0) : D×Cc0 → Cc.
It is a holomorphic motion.
Proof of Theorem B: We write alsoM : D× C −→ D×C for the extended holomor-phic motion, whose existence is assured by the Słodkovski theorem ([BR], [D1]). Thisextension is uniquely determined on the boundary of Cc
0, which contains the boundary ofH0. Hence it easily follows that for each fixed λ ∈ D we have M(λ, ∂H0) = ∂Hλ andM(λ,H0) = Hλ. ThusM restricts to D×H0 is a homeomorphism from D×H0 onto HD.
We define a new map N : D×X0 → X by
N (λ, z) =
Π Ψ(λ, z) if z ∈ Yc
0 = Bc0 = C r D
Φ M (Id× Φ−10 )(λ, z) if z ∈ Y0 = D .
It is easy to check that N is a generalized holomorphic motion.
Claim. The map N is a homeomorphism.
Assuming for the moment this claim, we have Φ = N (Id × Φ0) M−1 : H →Y . However, a deep result of Faught-Roesch ([Fa, Ro]) assures that Φ0 extends to ahomeomorphism (also denoted by Φ0) : H0 → Y0. Let us call it the FR-extension.Therefore the composition above defines a homeomorphic extension Φ : HD → Y . Thebig diagram below illustrates the various maps and their relationships, where the diagram∗ is the final step.
Proof of the Claim: Clearly N is injective and a local homeomorphism at an (λ, x) with|x| 6= 1. Fix (λ0, x0) with x0 ∈ S1 and |λ0| = r0 < 1. Fix r0 < r < 1. Now the set ofz ∈ Y0 whose leaf intersects
⋃|λ|≤rλ×Γλ = Γ|λ|≤r is compact in Y0 = D, as it is the case
inH0. Hence there is a neighborhood V ⊂ C of x0 such thatN (Dr×V )∩Γ = ∅. ThereforeΠ−1 N : Dr×V → Dr×C is a holomorphic motion in the classical sense. It is thereforea homeomorphism from Dr × V onto its image ([BR], [D1]). So N = Π (Π−1 N ) isa homeomorphism from Dr × V onto its image, in particular a local homeomorphism at(λ0, x0). q.e.d.
Corollary 15 (=Theorem A’.b2)) The variety X is isomorphic to D×C.
Proof : The map N : D× C = D× X0 → X is a holomorphic motion, and analytic onD×|z| ≥ R for some large R. Now for each λ ∈ D the maps Nλ pulls back the complexstructure of Xλ to a complex structure σλ on C, which has compact support. It follows
22

that λ 7→ σλ is holomorphic. By the Measurable Riemann Mapping Theorem, there is aholomorphic motion
D× CO←− D× C
normalized so that Oλ is tangent to the identity at∞ and fixes 0, such that Oλ integratesσλ. Now
N O−1 : D× CO←− D×C
N−→ Xis bi-holomorphic, and fiber-preserving. q.e.d.
D× Dc (λ,b2)←− D× D
c
րId×L0↑L ↑√L Böttcher position of the
D× Cc0
M−→ Cc (λ,b2)←−√Cc escaping co-critical point
∩ ∩
D× CM−→ D×C Słodkovski extension
∪ ∪
D×H0 ⊂ D×H0M−→ HD ⊃ H ⊃ λ × Hλ ∋ a
Id×Φ0↓ FR-extension
Id×Φ0↓ ∗ ↓Φ ↓Φ ↓Φλ
ηa(c1a) ↓
D×Y0 ⊂ D× Y0N−→ Y ⊃ Y ⊃ Yλ
πλ←− Bλ
∪ ∪ ∩
D× ∂Y0N−→ ∂Y X
∩ ∩
D× Yc0
N−→ Yc Y0 = B0 = D
Id ↑ ↑Π
D× Bc0
Ψ−→ V
(λ, z) 7→ (λ, h(λ, z)) Böttcher coordinates at ∞
A Boundary extensions as |λ| → 1
Fix λ0 ∈ S1. In order to extend our coordinate Φ to the λ0-slice the first task is to definea suitable Yλ0
from the dynamical plane of Qλ0, and then study the limit of Φ as λ ∈ D
and λ→ λ0 radially.
In the parabolic case λ0 = ei2πp/q, (p, q) = 1 the sets U0λ , their boundaries and the
equivalence relations ∼λ have describeable limits. This will lead to the definition of Yλ0
23

together with a map Φλ0from the corresponding part of ∂H to Yλ0
. We will prove thatΦλ0
is a radially continuous extension of Φ. This will be the content of [P-R-T].
The case λ0 = ei2πθ with θ irrational is a lot more subtle. Let us denote by ω(c0) theω-limit of the critical orbit.
Yoccoz [Yo] has proved that, depending on whether θ satisfies the Brjuno conditionor not, either Qλ0
has a Siegel disk ∆λ0and the pointed domains (U0
λ , 0) converge in thesense of Caratheodory to (∆λ0
, 0); or Qλ0has a Cremer point and (U0
λ , 0) diverge in thesense of Caratheodory to the singleton 0.
The easiest case to study is the case that ∆λ0exists, and has a Jordan curve boundary
passing through the critical point cλ0. In this case ω(cλ0
) = ∂∆λ0and the linearizer
φλ0: ∆λ0
−→ D normalized by φλ0(cλ0
) = 1 induces an equivalence relation ∼λ0on C\∆λ0
similar to the one in the case λ ∈ D. Therefore (Kλ0\∆λ0
)/ ∼λ0would be a good candidate
for our Yλ0. For θ of bounded type S. Zakeri [Za] has indeed proved that the parameter
slice (λ0, a)|a ∈ C contains an embedded copy of Yλ0. But it remains to prove that this
copy sits on the boundary of H and that Φ extends radially continuously on it.
In the remaining cases, conjecturally, the compact sets ∂U0λ converges in the Hausdorff
topology to ω(cλ0) and ∼λ converges to some equivalence relation ∼λ0
. Then we can defineYλ0
accordingly. The difficulty here is to prove that the Hausdorff limit of ∂U0λ does exist
and does not exceed ω(cλ0). We don’t have yet definite results in these cases. However
the new results by Inou-Shishikura on parabolic renormalization will surely contribute tofuture progress on this problem.
B Application to other hyperbolic components
In order to apply Milnor’s result ([M2]) we will need to work on a different parametrizationof cubic polynomials.
For d ≥ 3 let Pd = P |P (z) = zd + ad−2zd−2 + . . . + a0 ≈ Cd−1 denote the space of
monic centered polynomials of degree d.
We want to carry our result on H to the central hyperbolic component H3 of P3. Weshow here that H3 is naturally a double cover of H. We then define an appropriate squareroot, denoted by Y3, of Y , and provide a dynamical-analytic coordinate from H3 onto Y3.
To be more precise, define the Moduli spaceMd as the space of affine conjugacy classes[P ] of degree d polynomials P and let projd : Pd −→Md denote the natural projection.If ρd−1 = 1 and P ∈ Pd, then ρP (z/ρ) ∈ Pd and thus the conjugation by any of therotations z 7→ ρz, ρd−1 = 1 leaves Pd invariant. On the other hand any other affine mapconjugates any element of Pd out of Pd. It follows that projd : Pd −→Md is a degree(d−1) branched covering. Let Hd
M denote the central hyperbolic component ofMd, thenalso the restriction projd : Hd −→ Hd
M has degree d− 1. For any d > 1 the complex lineP ∈ Pd|a1 ∈ C, a0 = a2 = a3 = . . . = ad−2 = 0 is contained in the branching locus,and for d = 3, 4 it equals the branching locus for projd. For any d > 2 the polynomials onthis line are characterized by having 0 as a fixed point with multiplier a1 and a d− 1 foldrotational symmetry. Since this line equals the branching locus when d = 3 (and 4) theprojection onto moduli space is a simple squaring respectively cubing around this line.
24

For λ ∈ D∗ := Dr0, recall that ψλ : D→ C denote the inverse of the linearizer φλ forQλ, and that ψλ(1) is the critical point of Qλ. The map β : D −→ C given by β(0) = 0 andβ(λ) = ψλ(−1) for λ ∈ D∗ is holomorphic by the removable singularities theorem. Definea holomorphic branched double covering χ : D×C −→ D× C by χ(λ, z) = (λ, χλ(z)) =(λ, z2 + β(λ)) and define S3 = χ−1(D×C \ U). On the space S3 we define an equivalencerelation ∼3 by declaring (λ1, z1) ∼3 (λ2, z2) iff λ1 = λ2 = λ and either z1 = z2 orboth z1 and z2 belongs to the same connected component of χλ
−1(ψλ(S1 \ −1)) and
χλ(z1) ∼λ χλ(z2). Let Π3 : S3 −→ S3/ ∼3:= X 3 denote the natural projection and equipX 3 with the quotient topology. This topology is easily seen to be Hausdorff. Define alsoY3 = Π3(χ−1(B \ U)) ⊂ X 3 and an involution κ : X 3 −→ X 3 by κ(Π3(λ, z)) = Π3(λ,−z).The fixed point set for this involution is the set C3 = Π3(D, 0). Define Σ : Y3 −→ Yby Σ(Π3(λ, z)) = Π(χ(λ, z)) so that Σ is a degree 2 branched covering with coveringtransformation κ and branching locus equal to C3 and branch value set equal to thecomplex disk V = Π(D, 0) = Π((λ, β(λ))|λ ∈ D). Then Y3 and hence X 3 has a (unique)complex structure for which the map Σ is holomorphic. This is the unique structure forwhich the projection Π3 : D× C \ U −→ X 3 is holomorphic.
Theorem C. There exists a bi-holomorphic map Φ3 : H3 −→ Y3 such that Σ Φ3 =Φ proj3.
Proof : The restriction proj3 : H3 −→ H is also a holomorphic degree 2 branchedcovering with the set of branch values equal to Φ−1(V). It follows that there existsa bi-holomorphic map Φ3 : H3 −→ Y3 with Σ Φ3 = Φ proj3. This map satisfiesΦ3(−a0, a1) = κ(Φ3(a0, a1)) and is unique up to post composition by κ or equivalently byprecomposition by the map (a0, a1) 7→ (−a0, a1) : H3 →H3. q.e.d.
Note that it follows from Theorem A’ that there exists a bi-holomorphic map from X 3
onto D×C, commuting with projection to the first coordinates.
Universality of HOur coordinate on H and H3 can be carried to a similar coordinate to many other hy-perbolic components, through a result of Milnor ([M2]). He has classified the hyperboliccomponents of Pd into a finite number of types. He then constructs one abstract complexanalytic model for each type and proves that any hyperbolic component is canonicallybi-holomorphic to its abstract model.
In order to make precise statements, let us recall Milnor’s classification [M2, M2, pages3–8] of hyperbolic components in terms of mapping schemes. By definition a (finite)(critical) mapping schema is a weighted finite directed graph S = (S,w) such that eachvertex v ∈ S is the origin of precisely one directed edge ev, which is allowed to be a closedloop, and w(v) is a non negative integer called the critical weight of v. The vertex v iscritical iff w(v) > 0. The positive integer d(ev) = 1 + w(v) is called the degree of theedge ev. The mapping schema S is connected iff the underlying un-oriented graph is pathconnected. Clearly each connected component of S contains a unique cycle v0, . . . , vp−1,i.e. the terminal point of evi
is the vertex v(i+1) mod p. It is further assumed that S iscritical i.e. each cycle contains at least one critical vertex, and any entry vertex, i.e.
25

one which is not the terminal point of any edge, is critical. Two mapping schemes areisomorphic if there is a weight preserving bijection between the two underlying orientedgraphs.
A mapping schema S is reduced iff every vertex is critical. There is a natural projectionmap from the space of mapping schemes to the space of reduced mapping schemes givenby contracting each chain of degree 1 edges as well as their endpoints onto the terminalvertex of the chain.
(Reduced) Mapping Schemes encode the dynamical types of hyperbolic componentsin a canonical way: Firstly, associated with any hyperbolic polynomial P is a mappingschema S = (S,w), where the set of vertices of S equals the set of Fatou components Ufor P , with U containing at least one critical or postcritical point. For U ∈ S a vertexthe edge eU terminates on the vertex P (U) and the critical weight equals the number ofP critical points in U counted with multiplicity, so that the degree of the edge eU equalsthe degree of the restriction P|U , by the Riemann-Hurwitz theorem. Secondly, if two poly-nomials P1 and P2 belong to the same hyperbolic component, then they have isomorphicmapping schemes, because they are quasi-conformally conjugate in a neighborhood oftheir Julia sets, or J-equivalent, in the language of Mañé-Sad-Sullivan ([M-S-S]). Thusany hyperbolic component for which all the Fatou components are simply connected hasa unique (isomorphic class of) associated mapping schema.
For cubic polynomials with connected Julia set, there are four types of hyperboliccomponents according to their reduced mapping schema (the names are not completelyidentical to those of Milnor, there are also two types with disconnected Julia set that wedo not mention, see [B-H, B-H2] for related results):
Type I, (truly) cubics, corresponds to polynomials with an attracting periodic orbit forwhich one component of the immediate basin contains both critical points and hencethis component is mapped properly by degree 3 onto its image.
Type II, bi-transitive, corresponds to polynomials with an attracting periodic orbit for whichboth critical points are in the immediate basin of a single attracting cycle, butin two different connected components. The two components are thus mappedquadratically onto their images and the first return map on a component of theimmediate basin has degree 4.
Type III, capture, corresponds to polynomials with an attracting periodic orbit which attractsboth critical points, but only one of them is in the immediate basin, the other iscontained in a strictly preperiodic preimage. Again the map is quadratic on thecritical components, but the first return map on a connected component of theimmediate basin is quadratic.
Type IV, bi-quadratic, corresponds to maps with two distinct attracting cycles, each one witha critical point in the immediate basin.
The corresponding reduced mapping schemes are illustrated in Figure 3.
A type IV (bi-quadratic) hyperbolic component H is in some sense not cubic sincethe dynamics of the two critical points are completely decoupled. Such a component issimply the product of two one-dimensional hyperbolic components and the direct product
26

(1)
Type I Type III Type IV
(1)
(1)
(1)
(2)
(1)
(1)
Type II
Figure 3: The reduced mapping schemes corresponding to the four types of cubic hyperboliccomponents. The vertex weight is indicated by the adjacent number in parenthesis. This figureis equivalent to [M2, Figure 2, p. 4] but with different notations.
of the multiplier maps of the two attracting periodic orbits defines a bi-holomorphic maponto the bi-disk D× D. Bi-quadratics are also bi-renormalizable with two quadratic likerenormalizations, see also the paper [E-Y] for extended results in this direction.
Let us return to polynomials of general degree. Milnor [M2, Definition 2.4, p. 6]defines a universal polynomial model space PS associated with every mapping schema S
as follows: The elements of PS are the self maps f of |S| × C (where |S| denotes the setof vertices of S) such that f maps v × C onto v′ × C as a monic centered polynomial ofdegree d(ev), where v′ is the terminal vertex of ev. The hyperbolic locus HS ⊂ PS is thesubset of maps for which every critical point converges to an attracting periodic cycle.The central hyperbolic component HS
0 of HS is the connected component of HS containingthe map f which has the form zd(ev) on each complex plane v × C. Note that for S theweighted graph with only one vertex, with weight d− 1, and hence with exactly one edgeof degree d, we have PS = Pd, and HS = Hd, where Hd denotes the central hyperboliccomponent of Pd, namely the one containing zd. Note also that the dynamics of any PS
factors into sub factors corresponding to each connected component S′ of S and that each
such factor is universal in the sense that it depends on S′ only and in particular not on
the other factors corresponding to the other components of S. Evidently the attractingperiodic cycles are in 1 : 1 correspondence with the connected components of S, e.g. suchas type IV above.
27

Here is a schematic picture:
hyperbolic polynomials ⊂ Pd
↓H, hyperbolic components
↓Julia equivalent classes
↓mapping schemes
↓S, reduced schemes ←→ PS ←→ HS
0l
⊔Si
∣∣∣ Si connected reduced schema←→
∏ HSi
0
Though not explicitly stated, Milnor establishes the following factorization theoremfor hyperbolic components:
Theorem 16 (Milnor) Let H be a hyperbolic component in Pd for some d ≥ 2 withreduced mapping schema S and let S1, . . . ,Sn be the connected components of S. ThenH is bi-holomorphic to the direct product HS1
0 × . . .×HSn
0 . In particular, if one Si is theType I reduced schema above (i.e. with only one vertex of weight 2), then the centralhyperbolic component H3 of P3 appears as a factor in H . Consequently every Type Ihyperbolic component in P3 is canonically bi-holomorphic to H3.
(Note that this statement is similar to the discussion of the Teichmüller space of a rationalmap by McMullen and Sullivan in [McM-S].
Combining this with our result, we obtain
Corollary 17 The dynamical-analytic coordinate forH3 constructed in Theorem C yieldsautomatically a similar coordinate for any truly cubic (Type I) factor of any hyperboliccomponent in Pd, d ≥ 3; in particular for any Type I hyperbolic component of P3.
Note that the tools and ideas we have developed in this paper can easily be adaptedto the study of Type III components.
Milnor’s result on isomorphism of hyperbolic components of the same type is in factonly valid for the spaces Pd of monic centered polynomials and the universal polynomialmodel spaces PS. The reason is that for an arbitrary parameter space a hyperboliccomponent may be a branched covering of a corresponding component in Pd. In this caseit is not in general bi-holomorphic to the covered component. Or if some component inPd has a symmetry the branching may go the other way. In fact some of the hyperboliccomponents in Pd do have symmetries. The most prominent example is the centralhyperbolic component Hd ⊂ Pd, consisting of maps for which some attracting fixed pointattracts all critical points in the immediate basin. In a terminology similar to the abovethese polynomials are truly degree d.
28

C Table of notations
λ ∈ D Pa(z) = Pλ,a(z) =λz +
√az2 + z3 Qλ(z) = λz + z2
attracting fixed point 0 0attracting basin Ba Bλ
case λ 6= 0max. domain mapped
univalently onto a round U0a
U0λ
disc by a linearizercritical points c0
a∈ ∂U0
a, c1
ac0λ ∈ ∂U0
λ
critical values v0a∈ U0
a, v1
av0
λ ∈ U0λ
normalized linearizer φa, φa(c0a) = 1 φλ, φλ(c
0λ) = 1
ϕa, ϕ′a(0) = 1
filled potential function κa : Ba → [−∞,+∞[ κλ : Bλ → [−∞,+∞[open potent. domain U0
a(t) =c.c. of κ−1
a[−∞, t[ U0
λ(t) =c.c. of κ−1λ [−∞, t[
closed potent. domain La(t) =c.c. of κ−1a
[−∞, t] Lλ(t) =c.c. of κ−1λ [−∞, t]
case λ = 0, a 6= 0Böttcher coordinates φa φ0 = idmax. domain mapped
univalently onto a round U0a
B0 = D
disc by φcritical points c0
a= 0, c1
a∈ ∂U0
ac00 = 0
potential function ga : Ba → [−∞, 0[ gλ : Bλ → [−∞, 0[
Γλ = ∂U0λ/ ∼,Yλ = Bλ r U0
λ/ ∼quotient Xλ = C r U0
λ/ ∼where z1, z2 ∈ ∂U0
λ , z1 ∼ z2⇐⇒ φλ(z1) = φλ(z2)
H the hyperbolic component of z3
parameter space ηa = extension of φ−1λ φa: a subset of Ba −→ Bλ
X :=⊔
λXλ, Y :=⊔
λ Yλ, Γ =⊔
λ Γλ
Φ : a 7→ [ηa(c1a)], H → Y ⊂ X , F → Γ
Acknowledgment. We wish to thank J. Milnor for communicating with us his ideasabout the subject, A. Douady for inspiring discussions, and the anonymous referee forcareful reading. This research has been partially supported by British EPSRC GrantGR/L60999. The first author also wishes to thank the CNRS-UMR 8088 at Cergy-Pontoise for several invitations and the Danish Natural Sciences Research Council fortravel support.
29

References
[BR] L. Bers & H.L. Royden, Holomorphic families of injections, Acta Math. 157(1986) pp 259-286.
[B-H] B. Branner & J. H. Hubbard The iteration of cubic polynomials. I.: The globaltopology of parameterspace. Acta Math. 160 (198)8, 143-206.
[B-H2] B. Branner & J. H. Hubbard The iteration of cubic polynomials. II.: Patternsand parapatterns. Acta Math. 169 (1992), 229-325.
[Ch] B. Chabat, Introduction à l’analyse complexe, Tome 2, Functions de plusieursvariables. Mir, 1990.
[CJS] Guizhen Cui, Yunping Jiang & Dennis Sullivan, On geometrically finite branchedcoverings-II. Realization of rational maps, in Complex dynamics and related top-ics, ed. Yunping Jiang and Yuefei Wang, The international press 2004, p. 15-29.
[CT] Cui G.-Z. & Tan L., Sub-hyperbolic mappings without Thurston obstructions andcodings by Hubbard trees, prépublication Université de Cergy-Pontoise, Number10/2005.
[D1] A. Douady, 1993, Prolongement de mouvements holomorphes [d’après Słodkovskiet autres]. Séminaire Bourbaki 755.
[DH1] A. Douady & J.H. Hubbard, Itération des polynômes quadratiques complexes,C.R.Acad.Sc.Paris, t 294 (18 janvier 1982) Série I p. 123
[DH2] A. Douady & J.H. Hubbard, On the dynamics of polynomial-like mappings, Ann.Scient. Ec. Norm. Sup., 18 (1985), pp 287-343.
[E-Y] A. Epstein and M. Yampolsky, Geography of the cubic connectedness locus: in-tertwining surgery. Ann. Sci. École Norm. Sup. (4) 32 (1999), no. 2, 151-185.
[Fa] D. Faught, thesis at Cornell University.
[GK] L. Goldberg and L. Keen, The mapping class group of a generic quadratic rationalmap and automorphisms of the 2-shift. Invent. Math. 101 (1990), pp 335-372.
[Ma] Massey, Introduction to Algebraic Topology, Springer Verlag.
[Mc] C. T. McMullen, Self-similarity of Siegel disks and Hausdorff dimension of Juliasets. Acta Math. 180, (1998), no. 2, pp. 247–292, Appendix A.
[McM-S] C. T. McMullen & D. Sullivan, Quasiconformal homeomorphisms and dynamicsIII. The Teichmüller space of a holomorphic dynamical system. Adv. Math. 135(1998) no. 2, pp 351–395.
[M-S-S] R. Mañé, P. Sad and D. Sullivan, On the dynamics of rational maps., Ann. Sci.École Norm. Sup. 16 (1983), pp 193–217.
30

[M1] John Milnor, Dynamics in one complex variable. Introductory lectures. Friedr.Vieweg & Sohn, Braunschweig, 1999.
[M2] John Milnor, Hyperbolic Components in Spaces of Polynomial Maps. IMSPreprint #1992/3 SUNY StonyBrook.
[M3] Milnor, private communication
[Pe] C. L. Petersen, When Schröder meets Böttcher, Convergence of level sets,C. R. Math. Acad. Sci. Paris, Ser. I, Vol. 339/3 (2004), pp 219-222.
[P-R-T] C. L. Petersen, P. Roesch and Tan Lei, Parabolic slices on the boundary of H.manuscript in preparation.
[Re] M. Rees, Components of degree two hyperbolic rational maps, Invent. math., Vol.100 (1990), pp 357-382.
[Ro] P. Roesch, Hyperbolic components of polynomials with a fixed critical point ofmaximal order. PRÉPUBLICATIONS DU LABORATOIRE EMILE PICARD,UNIVERSITÉ PAUL SABATIER, U.F.R. M.I.G., n.306 (2006).
[Za] S. Zakeri, Dynamics of cubic Siegel polynomials. Comm. Math. Phys. 206 (1999),no. 1, pp 185-233.
[Yo] J.-Ch. Yoccoz, Petits Diviseurs en Dimension 1. Astérisque 231 (1995), SociétéMathématique de France.
Addresses:
Carsten Lunde Petersen, IMFUFA, Roskilde University, Postbox 260, DK-4000 Roskilde,Denmark. e-mail: [email protected]
Tan Lei, Unité CNRS-UMR 8088, Département de Mathématiques, Université deCergy-Pontoise, 2 Av. A. Chauvin, 95302 Cergy-Pontoise. e-mail: [email protected]
31













![ANALYTIC GEOMETRY - Announcementssanjosemathcircle.org/handouts/2008-2009/20090328.pdf · 3. (1958 AMC 12, ]35) A triangle is formed by joining three points whose coordinates are](https://img.pdfslide.us/doc/110x75/5ac0805d7f8b9ae45b8c3e25/analytic-geometry-announceme-1958-amc-12-35-a-triangle-is-formed-by-joining.jpg)













