Embed Size (px)
Citation preview

1
Analysis and Evaluation of Automatic Vehicle Location (AVL) for Maryland Transit Administration (MTA): Short-Term And Long-Term Strategies
Young-Jae Lee, Ph.D. Assistant Professor
School of Engineering Morgan State University
Baltimore, MD 21251
National Transportation Center Montebello D-206
Morgan State University Baltimore, MD 21251
December 2002

2
DISCLAIMER
The contents of this report reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented herein. This document is disseminated under the sponsorship of the Department of Transportation, University Transportation Centers Program, in the interest of information exchange. The U.S. Government assumes no liability for the contents or use thereof.

3
Technical Report Document Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No.
4. Title and Subtitle Analysis and Evaluation of Automatic Vehicle Location (AVL) for Maryland Transit Administration (MTA): Short-Term And Long-Term Strategies
5. Report Date
6. Performing Organization Code
7. Authors: Young-Jae Lee, Asst. Professor, Engineering, Morgan State University
8. Performing Organization Report No.
9. Performing Organization Name and Address National Transportation Center Morgan State University 1700 E. Cold Spring Lane Baltimore, MD 21251
10. Work Unit No. (TRAIS) 11. Contract or Grant No.
12. Sponsoring Organization Name and Address Maryland Transit Administration 6 St. Paul St. Baltimore, MD 21251
14. Sponsoring Agency Code
15. Supplementary Notes 16. Abstract The AVL system that the Maryland Transit Administration (MTA) provides has many potential advantages for both operators and passengers on a short-term and a long-term basis. AVL systems can contribute to the optimization of vehicle operation, scheduling, and run-cutting for operators and reliable service and travel information for passengers. This research suggests the proper data to be collected from the system and shows the impact of the AVL system on scheduling adherence as short-term improvement. It suggests proper running time analysis based on collected data and includes recommendations for scheduling changes for future operation. 17. Key Words
18. Distribution Statement No restrictions. This document is available to the public from the: National Transportation Center Morgan State University 1700 E. Cold Spring Lane Baltimore, MD 21251
19. Security Classification (of this report)
20. Security Classification (of this page)
21. No. of Pages
22. Price

4
TABLE OF CONTENTS Introduction 9 Introduction to AVL System
1.2 AVL System in ITS Application
1.3 Benefits from AVL System
1.4 AVL History at MTA
1.5 Current Reporting System for AVL
1.6 Objectives of the Project
1.7 Scope of the Project Methodology 17 2.1 Data Collection
2.2 Schedule Adherence 2.3 Changes in Drivers’ Behavior with AVL Support
2.4 Running-time Analysis
2.5 Trade-off between Link Travel Time and Schedule Adherence
Analysis of Results by AVL Intervention 21
3.1 Schedule Adherence and Drivers’ Operational Behavior --Aggregated Data Analysis
3.2 Schedule Adherence and Drivers’ Operational Behavior – Disaggregated Data Analysis or the Peak Time and Off-peak Time
3.3 Travel Time Distribution and Running Time Analysis
3.4 A Scheduling Example
Conclusion 81 4.1 Data Collection
4.2 Schedule Adherence
4.3 Running Time Analysis ACKNOWLEGEMENTS REFERENCE

5
LIST OF TABLES Chapter 1 Table 1.1 Results of the survey from 40 Operators at MTA regarding their operational behaviors Chapter 3 Table 3.1 Schedule Adherence and Link Travel Times before and after AVL Interventio Table 3.2 Averages and Variances of the Arrival Times at the Main Timepoints and Next Timepoints, and Link Travel Times Table 3.3 Tests of Statistical Hypotheses for the Various Cases Table 3.4 Schedule Adherence and Link Travel Times before and after AVL Intervention during Peak Hours Table 3.5 Schedule Adherence and Link Travel Times before and after AVL Intervention during Off-peak Hours Table 3.6 Bus number and number of links having overnight as base variable for regressions Table 3.7 Summary of results from regression analysis Table 3.8 Summary of Regression Analysis on links where some variables are not present Table 3.9 Summary of Results from regressions categorized by routes having all variables with overnight as base Table 3.10 Parameters for GED distributions and number of rows per link for all Routes Table 3.11 Bus routes information Table 3.12 Starting and ending time points of links for all routes TABLE 3.13 Predicted Travel Times at different Percentages for On-time performance for Route 2 Table 3.14 Predicted Travel Times at different Percentages for On-time performance for Route 3 Table 3.15 Predicted Travel Times at different Percentages for On-time performance for Route 13 Table 3.16 Predicted Travel Times at different Percentages for On-time performance for Route 22 Table 3.17 Percentages of buses arriving late at different definitions of lateness Table 3.18 Travel time for superlink Saratoga Lexington Market – Fred Ingl using different ways for calculation Table 3.19 Comparison of on-time performance results using different methods of travel time estimation for different definitions of late for superlink Saratoga Lexington-Fred Ingl

6
LIST OF FIGURES Chapter 1 Figure 1.1 Percentage of Agencies surveyed that have deployed or plan to deploy ITS technology Figure 1.2 Schematic map with the testing routes in MTA bus system. Chapter 3 Figure 3.1 Arrival distribution at the main Timepoints Figure 3.2 Arrival distribution at the next Timepoints after early arrival at the main Timepoints Figure 3.3 Link travel time distribution after early arrival at the main Timepoints Figure 3.4 Density functions for Link 23 Figure 3.5 Density functions for Link 115 Figure 3.6 Density functions for Link 66 Figure 3.7 Density functions for Link 139 Figure 3.8 Density functions for Link 165 Figure 3.9 Density functions for Link 117 Figure 3.10 Travel times at different percentiles Figure 3.11 Travel times at different percentiles Figure 3.12 Travel times at different Percentiles Figure 3.13 Travel times at different Percentiles Figure 3.14 Travel Times at different Percentiles Figure 3.15 Travel times at different Percentiles Figure 3.16 Travel times at different Percentiles Figure 3.17 Travel times at different Percentiles Figure 3.18 Route travel time versus on-time performance (Route 2 direction 0) Figure 3.19 Route travel time versus on-time performance (Route 2 direction 1)

7
Figure 3.20 Route travel time versus on-time performance (Route 3 direction 0) Figure 3.21 Route travel time versus on-time performance (Route 3 direction 1) Figure 3.22 Route travel time versus on-time performance (Route 13 direction 0) Figure 3.23 Route travel time versus on-time performance (Route 13 direction 1) Figure 3.24 Route travel time versus on-time performance (Route 22 direction 0) Figure 3.25 Route travel time versus on-time performance (Route 22 direction 1)

8

9
Analysis And Evaluation of Automatic Vehicle Location (AVL) for Maryland Transit Administration (MTA): Short-Term And Long-Term Strategies
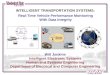
Introduction 1.1 Introduction to AVL System An AVL system is a computer-based vehicle tracking system capable of determining a vehicle’s location in real time. It allows a dispatcher from a control center to track vehicle movement and to communicate with the vehicle’s operator. The expected benefits from an AVL system are improved schedule adherence, better emergency response, real time information and data availability potentially used for planning and operation purposes [1]. At present, more than 60 transit agencies throughout the nation are at various stages of considering or installing AVL systems on their buses to improve fleet management and transit services. Although some benefits of the AVL system seem evident, there are very few studies that show the analytical results and benefits. The goal of this research is to gather the data from MTA and to show the impacts and benefits from the AVL system. 1.2 AVL System in ITS Application In addition to above benefits expected from the AVL system, there are other potential benefits. AVL is a key application of Intelligent Transportation System (ITS) to public transportation. According to the survey in 1994/1995, among ITS technology for transit including AVL, smart card, Automatic Passenger Counting (APC), passenger information system and adaptive signal control, AVL system has the most support from transit agencies: about 80 percent of agencies answered that they have deployed or plan to deploy AVL system as shown in Figure 1.1 [2].

10
80
2533
42
64
25
0
10
20
30
40
50
60
70
80
90
AVL SMARTCARDS
APC AUTOANNUN
PASSINFO
SIGNALPREMP
TECHNOLOGIES
PER
CEN
T O
F SU
RVE
YED
AG
ENC
IES
ITSTECHNOLOGIES
Figure 1.1 Percentage of Agencies surveyed that have deployed or plan to deploy ITS technology. 1.3 Benefits from AVL System As mentioned in previous section, there are numerous impacts and benefits expected from AVL system. In this section, they are briefly categorized: Spatial • Real-time application • Off-line application Type • Quantitative • Qualitative Object • Passenger • Agency

11
Temporal • Short-term • Long-term The Automatic Vehicle Location (AVL) system that Maryland Transit Administration (MTA) provides has many potential advantages for the operator and passengers for both short- and the long-term. These systems can contribute to the optimization of vehicle operation, scheduling and runcutting for the operator as well as reliable service and travel information for passengers. 1.4 AVL History at MTA
1.4.1 Background [5, 6, 7] During 1986, MTA decided to enter the Bus Communications and Control Program. The program was to help MTA meet its goal of providing the public with more efficient and reliable service. It was decided that the program was to be implemented in phases: Phase I: Improve radio communication between dispatcher and bus
operator. Phase II: Introduce LORAN-C based AVL on 50 buses and four
supervisory jeeps with: Route-Schedule Adherence; historical data; map playback; 20-second vehicle polling. This phase was used to verify the AVL concept.
Phase III: Start fleetwide implementation of the AVL systems
w/Automatic Passenger Counting; improve radio coverage and efficiency; AVL on Light Rail.
Phase IV: Complete radio system transition to 490mhz trunking;
acquire additional frequencies (if available); acquire or upgrade necessary portable and mobile radios.
Phase V: Complete fleetwide implementation of AVL; integrate AVL
with other systems. At the conclusion of Phase II of the program, an evaluation was conducted to determine whether the program was meeting its goals. The AVL On-Time Performance Report, published in April 1993, clearly illustrated that the objectives were met by the Phase II system. This system, however, had its limitations. These limitations are addressed in Phase III. The Phase III AVL system would include the following: Upgrade from LORAN-C to GPS; add it to 200 buses (including the upgrade of the Phase II buses) and all Light Rail Vehicles; upgrade the radio system from conventional to trunked; acquire a schedule and run-cutting system; and add Automatic Passenger Counting to 25 buses. The objectives of the Phase III system were essentially the same as those in Phase II. However, in Phase III, MTA

12
expected to achieve a solution applicable for the next 20 years of operation. The MTA expects to:
A. Improve service reliability. B. Increase driver and passenger safety. C. Reduce operational expenses. 1.4.2 Other AVL-Related Projects
There are other major projects in progress right now that are directly related to AVL or have a profound effect upon the operation of AVL. These relationships are described below.
Transit Information Center Upgrade (TICU) Phase II TICU II provides an automated transit information system and Multimedia Kiosks that require the integration of existing MTA systems including the scheduling and runcutting, AVL/CAD Phase III, and computer-telephony integration. This integration provides the capability of providing the public with current and real-time information via the ATIS and the Kiosks. Computer-based training modules will be provided to improve the training process and to provide a refresher course for the Transit Information Center Agents and Bus Supervision. Automatic Vehicle Location Phase IV The AVL Phase IV Program expands the trunked radio communications system from five to eight channels and installs additional desktop radio consoles at the Bus Communications Control Center and the Light Rail Control Center. Specifically, this includes the design, installation, optimization, and placing into service three new base stations at each of the two radio sites (Westview and Mays Chapel), along with the addition of site controller, central electronics bank and voting comparator equipment. The trunking enhancements to the existing MTA Radio communications Systems will increase the efficiency of all bus, maintenance, and dispatcher operation by decreasing the average time that users must wait before a frequency is clear for talking. The objective of Phase IV is to provide the radio communication requirements necessary for complete outfitting of all MTA bus and maintenance vehicles with AVL/CAD Systems. Scheduling and Runcutting System The scheduling and runcutting system was replaced as a part of the AVL Phase III project. This provided a map-based scheduling system to ease data transfer to the AVL system. Along with this, PLAN, a supportive data collection system is also being installed to interface with both scheduling software and the map. Just as vehicle schedules and route map activity supports the AVL system through PLAN, they also support the manual

13
collection of ridership data and will allow the use of an Automatic Passenger Counting (APC) System as well as hand-held data collectors. The data collected and summarized by the PLAN system provides the information required to update the schedules and runs. This in turn makes the use of the scheduling system practical. Automatic Passenger Counting System (APC) The MTA became the first transit property to require the linking of a real-time GPS system to an APC system. Previously, such systems used signposts along the scheduled route and dead reckoning to identify stop locations. This new system uses the schedules and stop location information, transferred to the AVL, to actively count passengers boarding or alighting transit vehicles. This data is then transferred, through AVL, to the scheduling system’s PLAN software, where it will be used to update the schedules, to answer patron complaints, and respond to service requests. The intent is to automate the data collection, transfer, uploading and summarization process. This linking of GPS and APC has now become standard in the industry wherever both systems exist.
1.5 Current Reporting System for AVL [8] The SmartTrack CAD/AVL system, developed and provided to MTA by Orbital/Transportation Management Systems (TMS) in Orbital for the data collection and monitoring operation, is a fleet management system providing voice and data communications between dispatchers and vehicle operators, incident management, vehicle location tracking, route/schedule adherence tracking, data collection, report generation and status monitoring. Schedule Adherence tracking is performed by the system as follows. When a driver logs onto the route and block, and he/she is about to run, the SmartTrack server at the dispatch center downloads the schedule for the specified route and block to the Intelligent Vehicle Logic Unit (IVLU) on the vehicle. When the vehicle goes off-schedule (early or late) by more than a specified amount at a time point, which is a pre-set location for checking the schedule adherence by the system, a data message (incident) is sent to the SmartTrack dispatcher workstation and the off-schedule incident is also stored in the SmartTrack database. The Lead Dispatcher can adjust the amount of time used to determine when a vehicle is considered early or late. The Lead Dispatcher can also generate the Schedule Adherence Report, which lists all early/late incidents received during a given time frame. 1.6 Objectives of the Project Although some benefits of AVL, including qualitative impacts, are evident, many benefits from off-line applications, including operations analysis and planning, have been discussed [1, 3, 4], but there is little research to show the analytical results and benefits. Although operators have the written schedule for their operation, and are expected to try to keep the schedule, efforts by the operators to meet the schedule have been hardly

14
appreciated. Table 1.1 is the result of a survey of 40 Operators, which was conducted after the "without AVL intervention" test period. This project will suggest the proper data to be collected from the AVL system. Also, this project will evaluate the effects of the short-term improvement through AVL (real-time intervention), and will suggest the long-term planning and operation plan as well as predict the long-term effects of those systems (link travel time adjustments for future scheduling). Table 1.1 Results of the Survey from 40 Operators at MTA Regarding Their Operational Behaviors Always
(5) Almost
(4) Sometimes
(3) Seldom
(2) Never
(1) Average
I check my schedule at each timepoint.
17 12 11 - - 4.15
If I am running ahead of schedule, I try to drag the line to get back on schedule.
20 10 7 2 1 4.15
If I am running late, I try to get back on schedule by safely adjusting speed.
21 10 6 2 1 4.2
If I am operating off the schedule, I call radio supervision to explain why.
12 4 12 4 8 3.2
As a short-term benefit of the AVL system, short-term operational adjustment can be expected. This short-term adjustment will allow the predictable operation and runcutting. Also, better on-time performance can be expected. These expectations can be examined with two sets of one-month experimental data with and without short-term adjustment. As a long-term benefit of the AVL system, the appropriate scheduling through properly estimated link travel time will be suggested for the better on-time performance from the collected data with short-term adjustment. This results in more reliable and cost-efficient scheduling. These potential improvements through the AVL system will be beneficial not only for the transit agency but also for transit users. Higher reliability will increase ridership, which will increase revenue of the system and will be beneficial for the agency, eventually.

15
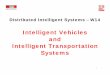
1.7 Scope of the Project This study collected the data from four bus routes of MTA, numbers 2, 3, 13, and 22 shown in Figure 1.2. These lines were chosen with several factors in mind:
1. Utilization of all four of the bus divisions in MTA. 2. Sufficient AVL equipped vehicles to handle the routes simultaneously. 3. Good ridership data. 4. Somewhat difficult to manage the schedule adherence. The data was collected for two sets of four-week periods. During the first four weeks, the AVL system was used only as a tool for the radio communications and the data collection. It was not used to intervene schedule abnormalities that occur on the street. This phase is identified by the phrase ‘without AVL intervention’. On the other hand, operators had to be watched carefully to guarantee proper logons at pullout, layovers, for relief, et.al. This policing function was carried out by the dispatcher.

16
Route 02
Towson
Morgan State Univ
St Paul Street
Sheppard Prat hosp
Lombard Conway
Penn Station
Camden Yards
Northern Pkwy
Baltimore Street
Fayette Street
Gay Street Lombard Street
Joppa Road
U.S Rt 40
Coppin State College
Boston
East Ave
Spruce
Lafayette
University Parkway
Eaton
Route 22
Route 13
Route 03
City of Baltimore
Figure 1.2 Schematic map with the testing routes in MTA bus system The following four-week period was identified by the phrase ‘with AVL intervention’. The AVL system was used vigorously to intervene or intercept problems found along the four evaluation routes. Dispatchers were expected to not only make sure logons have occurred but must also contact vehicle with regard to route and schedule adherence, mechanical problem indications, and service adjustments.

17
This study analyzes the data in aggregated way for the scheduling adherence to test overall performance by AVL intervention. However, link time estimation will be examined for the each route. METHODOLOGY In this section, methodologies for major issues such as data collection, scheduling adherence, drivers’ behavior analysis, running time analysis and the relationship between scheduling adherence and estimated link travel times will be discussed. 2.1 Data Collection MTA and TMS generate incident files and three kinds of reference files. The incident files contain date, schedule time, vehicle ID, operator ID, route number, block number, arrival status (early, late or on-time), thresholds, time point (TP) ID, and TP name. This file gives the idea how early or late a bus arrives at time points. The minimum threshold that can be set to show the earliness and lateness is one minute. If the vehicle is more than a minute early or late, then the system shows the earliness and lateness in half a minute. This threshold can be set in two ways: one for the record and the other for the alert. Although the threshold for the record for this research was set to a minute to provide the arrival time data close to the real arrival time, the threshold for the alert that was informed and displayed to operators and dispatchers was set to one minute for the earliness and three minutes for the lateness. Original incident files contain only off-schedule data, which are in early or late status, but for this research, additional data for the on-time arrivals were artificially generated according to the schedule time. The reference files are log-on file, log-off file and error file, and they provide the additional information in terms of the correctness of the incident file. Although incident files are supposed to have correct data, some of them are not correct due to the system malfunction and mistakes by the operators. Only 86.9% of the collected data was used for the analysis.
2.2 Schedule Adherence This study follows a “before-and-after” study to compare the results by “with” and “without” AVL intervention to show the impacts on schedule adherence for transit systems by the AVL system. The collected data is categorized by the arrival status at time points: 1) early (more than one minute ahead of schedule), 2) late (more than three minutes behind schedule), and 3) on-time (less than one minute early and less than three minutes late). In order to show the impacts, frequencies of occurrences for each arrival status, average arrival times compared to the schedule, and variances of the arrival times for both with and without AVL intervention, will be analyzed and tested for the statistical hypotheses to show the improvement by AVL. The result will be analyzed, aggregated as well as disaggregated, for each route, time period and each time point.
2.3 Changes in Drivers’ Behavior with AVL Support Although schedule adherence itself is important, drivers’ behavior and their responses to AVL system may be more valuable, because in many cases, especially when the operation is behind schedule, to get back on schedule is difficult and sometimes out of the

18
operator’s control. However, the AVL may encourage the driver to meet the schedule. This impact can be shown in the link travel times after the incident happens. In order to show the drivers’ behavior, the data is categorized by the arrival status at time points: 1) early, 2) late and 3) on-time. For each case, arrival status at the next time points and link travel times after those particular stops are examined to see whether there is a relationship between arrival status and link travel time, and whether AVL encourages the relationship to go in a positive direction. Usually, when the vehicle is ahead of schedule, it creates a problem, because once passengers miss the bus, they need to wait the entire headway, which is usually longer than the waiting time caused by a vehicle that is behind schedule. However, the problem of a vehicle being ahead of schedule is easier to resolve. In this analysis, the results of both aggregated and disaggregated ways will be discussed.
2.4 Running-time Analysis Running time analysis is when data is collected and analyzed with AVL intervention to find proper link travel times for efficient scheduling. There can be two approaches for running-time analysis in terms of the formation of data. The first uses discrete data, which is a similar format with those collected from the AVL system. The arrival times and the link travel times are separated by the given gap by AVL system, which is 30 seconds in this study. The second approach uses continuous density function, which can be estimated from the collected discrete data. When the discreteness of the data is severe and the amount of the collected data is minimal, using the continuous data function can be more effective, because it can reduce distortions and size of the collected data, although it requires higher skill to estimate the functions from the collected data. In this study, estimation of the density function is briefly introduced, and the estimation of link travel time is also introduced [9]. First, a standard ordinary least squares (OLS) regression was performed with link travel time as the dependent variable. The right-hand side variables were: weekday (vs. weekend), a vector of time of day, lag status early and lag status late. Note that every variable is a dummy variable. While other variables may affect the average travel time, these are the variables that seem reasonable to include in a scheduling process. Seasonal variables could be of interest as well, but the short duration of the data collection process precludes inclusion of these variables in this analysis. Lag status early and lag status late are used to pickup an important part of travel time that is not totally dependent on the time of day. It was shown that when a bus is behind schedule at a certain time point, the driver will make an effort to speed up and return to schedule. When a bus is ahead of schedule, the driver will make an effort to slow down

19
[9]. Both of these actions by the driver are more pronounced, and more successful, with AVL intervention. Since the travel times are significantly affected by these actions, we include them in the regression analysis. The form of the linear regression used is
77665544332211 xxxxxxxtraveltime βββββββa +++++++= where x1 = early morning and late evening time periods, x2 = mid-day periods, x3 = morning rush hours, x4 = afternoon rush hours, x5 = lag status early, x6 = lag status late, and x7 = weekdays.
The regression is estimated by OLS techniques in GAUSS, for each of the links separately. The time periods selected for the analysis were contradictory to the time period for morning rush hours used by the MTA. According to MTA, morning rush hours were from 6:00 a.m. to 9:00 a.m. and evening rush hours were from 3:00 p.m. to 6:00 p.m. Following the regression analysis, the travel times were fit to density functions. Many density functions were tried and tested against the data. The best density function for describing the data is kept for each link and used in the analysis. This allows examination of not only the changes in the mean of the travel time across links (as a regression allows), but also how various other benchmarks perform. For example, we can examine the 85th percentile travel time – or any other. A large group of density functions were fit to the data. Graphical results were presented from two of the functions, the Poisson distribution and the Generalized Error Distribution (GED). The Poisson is a discrete distribution function that is often used for arrival time data similar to that of the travel times in this study. The GED is a general form of continuous symmetric distribution. The distribution function for the Poisson is
!)(
xexf
xλλ−= , x = 0, 1, 2…
where λ ( λ ≥ 0 )is the parameter of the distribution and x represents the travel time. The mean of a Poisson distribution is λ. The density function for the GED distribution is

20
p
p
p
x
p
e
pp
xg σ
µ
σ
−−
+Γ
=112
1)( 1
where µ, σ, and p are the parameters of the distribution and x represents the travel time and p ≥1. µ = Mean of the distribution, σ2 = variance of the distribution and p = the “steepness” of the distribution. When p=2, the GED is the normal distribution; when p < 2, the distribution is more steep than normal distribution; and, when p > 2 the distribution is more flat than the normal distribution. For each link, the travel times are used to estimate the parameters of the distribution. The estimations are carried out in GAUSS using a maximum likelihood routine. The parameters that are returned maximize the likelihood that the data was drawn from a distribution of that type. There are no true tests between likelihood functions, this performance of the various distribution functions is judged by examining the graphical output, and from its performance in the χ2 test. Further research is being carried out to perform the tests. The scheduling procedure outlined in this research is quite simple once the density functions are estimated. The goal is to create a scheduling procedure where the manager of the transit system can trade on-time performance for frequency in full knowledge of the consequences. The examples presented in this paper are either for a sub-set of a single route or for the whole route in some cases and does not employ advanced estimation techniques. Because some links were not selected for the analysis, the travel time for whole route could not be obtained in some cases. Hence, a sub-set of the route (where the links were connected directionally) was used for those cases. It is merely meant to be illustrative of how the methodology presented can be used to schedule. For each of the links selected, the 50, 75, 85, 90, 95, 99, and 99.9 percent values are obtained. These give us the scheduled times needed for an on-time performance of that level. The sum of the scheduled times gives us the total time needed to cover the whole route or a sub–set of the route. In the section containing the examples, further extensions and refinements are presented.
2.5 Trade-off between Link Travel Time and Schedule Adherence It is not unreasonable to expect that there is a relationship between schedule adherence and running time for scheduling. To estimate the relationship, a couple of assumptions are necessary. When buses arrive early at the stations, if drivers are willing to wait or slow down to keep the schedule, then longer estimated run time will increase schedule adherence. However, if drivers do not slow down, longer estimated run time will cause poor schedule adherence due to the early departure. For this reason, a proper assumption is necessary.

21
Because of AVL intervention, it is assumed that there is no early departure – which means longer estimated running time would increase schedule adherence. The other issue which should be discussed is whether schedule adherence at minor Time Points should be kept or not. It is obvious that the effort to keep the schedule adherence at the “all Time Points” will increase estimated link travel time. If the schedule adherence of the selected major Time Points is considered, then running time would not be increased as much because of expected compensations of running times between major Time Points. Although keeping the schedule adherence at the major Time Points is more realistic, in this paper, both examples will be briefly presented.
ANALYSIS OF THE RESULTS BY AVL INTERVENTION 3.1 Schedule Adherence and Drivers’ Operational Behavior – Aggregated Data Analysis As mentioned, the results of the analysis are presented in an aggregated manner. Although the general results are important, the impact by the AVL intervention when the operation is ahead of schedule is paid special attention because the particular case can be easily improved by the drivers’ awareness of the schedule and willingness to meet the schedule. 3.1.1 Frequency Analysis on the Arrival Status and Link Travel Time The data collected before AVL intervention and after AVL intervention is classified in Table 3.1. The results show that regardless of the AVL intervention, the drivers try to maintain their schedule in most cases. Generally, when the arrival status is late at the main Time Point, it is expected that the traffic condition is not good, and there is more possibility in longer link travel time after the main Time Point, if drivers do not consider the schedule adherence. On the other hand, when the arrival status is early, it is expected that the traffic condition is good, and the vehicle can be operated with the shorter travel time, if the schedule adherence is not considered. In both cases, with and without AVL interventions, the opposite results to the normal expectations mentioned above were found. This result indicates that drivers are well aware of their schedule and most of drivers tried to adjust their operation speed to keep the schedule.

22
Table 3.1 Schedule Adherence and Link Travel Times before and after AVL Intervention Main Timepoint Next Timepoint Link Travel Time
Arrival status
Frequency (%)
Arrival status
Frequency (%)
Travel status
Frequency (%)
Before AVL
Early 5378 (4.4)
Early 3438 (63.9) Early 1512 (28.1) Late 396 (7.4) Late 3106 (57.8) On-time 1544 (28.7) On-time 760 (14.1)
Late 6269 (5.2)
Early 64 (1.0) Early 2871 (45.8) Late 5215 (83.2) Late 2483 (39.6) On-time 990 (15.8) On-time 915 (14.6)
On-time 109306 (90.4)
Early 1421 (1.3) Early 3384 (3.1) Late 3112 (2.8) Late 3779 (3.5) On-time 104773 (95.9) On-time 102143 (93.4)
Total 120953 (100.0)
Total 120953 (100.0)
Total 120953 (100.0)
After AVL
Early 1808 (1.8)
Early 1137 (62.9) Early 502 (27.8) Late 189 (10.5) Late 1031 (57.0) On-time 482 (26.7) On-time 275 (15.2)
Late 3747 (3.7)
Early 46 (1.2) Early 1612 (43.0) Late 3259 (87.0) Late 1548 (41.3) On-time 442 (11.8) On-time 587 (15.7)
On-time 96823 (94.6)
Early 527 (0.6) Early 1395 (1.4) Late 1297 (1.3) Late 1614 (1.7) On-time 94999 (98.1) On-time 93814 (96.9)
Total 102378 (100.0)
Total 102378 (100.0)
Total 102378 (100.0)
In terms of schedule adherence, the first concern that can be discussed from the test is the impact on the schedule adherence by the AVL application. The result in the aggregated manner is shown at the third column in Table 3.1. After the AVL intervention, the on-time performance (less than one minute early and less than three minute late) is improved by 4.2 percent from 90.4 percent to 94.6 percent. Consequently, early arrival and late arrival are also reduced by 2.6 percent and 1.5 percent respectively. As shown in the Table 1.1, because the drivers try to meet the schedule and they are well aware of the schedule, even without AVL intervention, the schedule adherence was not really low. However, with the alert system of the AVL system, the drivers could be aware of their operational status more effectively, and as results, schedule adherence was improved. The second concern that can be discussed is the breakdown of schedule adherence at the next Time Points to the main Time Points. This result can show the drivers’ behavior and willingness to keep the schedule. The fifth column in Table 3.1 shows that the overall schedule adherence (on-time performance), after the abnormal arrival status at the main Time Points, does not really improve. However, after the early arrivals, the probability of the early arrivals at the next time points is slightly improved by one percent from 63.9 percent to 62.9 percent. This indicates that even though drivers are aware of their

23
operational status from the AVL system, they were either not able to or not willing to keep the schedule at the next Time Points. For detailed analysis, link travel times were categorized in the seventh column of Table 3.1. This data shows the drivers’ behavior in the best way. In many cases, despite drivers who are willing to adjust their operating speeds in a safe manner to meet the schedule, since the traffic condition may not allow them to adjust their speeds, it is hard for them to meet the schedule at the very next stop after the abnormality in the previous stops. However, if they are willing to adjust, their willingness can be easily shown at the link travel time after the main Time Points. When the operation is ahead of schedule, the results show that AVL did not affect much to change drivers' willingness to slow down, since there is slight reduction (0.3 percent, from 28.1 percent to 27.8 percent) in shorter link travel time, which shows increase of the operating speed. These results conclude that AVL helps drivers to be aware of schedules and to adjust their speed to meet the schedule. However, it was also shown that some drivers, regardless of AVL intervention, did not and/or could not try to adjust their operation. One main reason can be the design of the bus stop. If there is no pocket for the bus at the stop, it is not possible to stay at the stop to keep the schedule. Also, because of given traffic condition, slowing down the operation may not be easy in many cases. Other improvement can be suggested with the active intervention by the dispatchers with the AVL intervention to the drivers who do not pay attention to their operation in terms of schedule adherence. For this case, education of the drivers will make the AVL system more effective. 3.1.2 Arrival Time and Link Travel Time Distributions Although Table 2 showed the frequency of incidents, and that table itself showed some improvements by AVL, in order to show detailed impact, the averages and variances for the cases introduced in Table 3.1 were computed in Table 3.2.
Table 3.2 Averages and Variances of the Arrival Times at the Main Timepoints and Next Timepoints, and Link Travel Times Main Timepoint Next Timepoint Link Travel Time
Arrival status
Average (Variance)
Arrival status
Average (Variance)
Travel status
Average (Variance)
Before AVL
Early -3.00 (4.82)
Early -3.37 (5.10) Early -1.24 (1.07) Late +2.46 (5.22) Late +2.40 (7.11) On-time 0.00 (0.00) On-time 0.00 (0.00) Average -1.69 (8.52) Average +1.00 (7.17)
Late +5.18 (24.00)
Early -1.76 (2.66) Early -1.70 (5.05) Late +6.18 (30.07) Late +1.44 (3.84) On-time 0.00 (0.00) On-time 0.00 (0.00) Average +4.83 (30.67) Average -0.30 (5.96)
On-time 0.00 (0.00)
Early -1.80 (1.50) Early -1.60 (1.58) Late +3.70 (16.35) Late +3.70 (16.35) On-time 0.00 (0.00) On-time 0.00 (0.00) Average +0.06 (0.74) Average +0.07 (0.73)

24
Total +0.31 (4.89) Total +0.40 (5.64) Total +0.08 (1.52) After AVL
Early -2.68 (4.92)
Early -3.03 (6.12) Early -1.23 (1.56) Late +3.17 (19.28) Late +2.54 (8.88) On-time 0.00 (0.00) On-time 0.00 (0.00) Average -1.57 (10.21) Average +1.11 (8.38)
Late +5.88 (32.36)
Early -2.16 (3.77) Early -1.81 (5.49) Late +6.60 (28.78) Late +1.47 (3.87) On-time 0.00 (0.00) On-time 0.00 (0.00) Average +5.55 (30.89) Average -0.25 (6.26)
On-time 0.00 (0.00)
Early -1.71 (1.46) Early -1.54 (1.35) Late +3.78 (16.13) Late +3.78 (16.13) On-time 0.00 (0.00) On-time 0.00 (0.00) Average +0.03 (0.32) Average +0.03 (0.31)
Total +0.28 (3.86) Total +0.31 (3.86) Total +0.03 (0.82) In most cases, with AVL intervention, the numbers were consistently improved compared to those without AVL intervention. Average arrival time for the main time points were reduced from 0.31 minutes late to 0.28 minutes late. Figure 3.1 shows the distributions of the arrival statuses with and without AVL interventions. Although data is recorded by 0.5-minute intervals, because the minimum amount of initial earliness and lateness recorded by AVL is one minute, all the data between one minute early and one minute late is recorded as on time. Since this system exaggerates on-time performance (0 minute in terms of arrival status), frequency recorded as on time was smoothly allocated to 0.5 minute early, 0.5 minute late and on-time artificially for realistic results. In spite of this effort, the figure shows extremely concentrated frequencies around on-time arrival. Because of this concentrated result, from Figure 3.1, it is not easy to distinguish two curves by with and without AVL. However, with a closer look, it is shown that the curve with AVL is more concentrated than the one without AVL, which shows the better schedule adherence with AVL. However, as discussed before, the case that we need to focus on for this paper is when the operation is ahead of schedule. The Table 3.2 shows that when the operation is ahead of schedule, the average earliness with AVL reduced by 0.32 minutes from 3.00 minutes early to 2.68 minutes early. In addition to that, at the next Time Points, average earliness was reduced by 0.34 minutes and average lateness was increased by 0.61 minutes from 2.46 minutes late to 3.17 minutes late. Consequently, the average arrival time at the next Time Points after the early arrival at the main Time Points was increased by 0.12 minutes from 1.69 minutes early to 1.57 minutes early. Figure 3.2 shows the arrival distribution curves with and without AVL at the next Time Points when the arrival status was early at the main Time Points. It is clearly shown that with AVL, the curve moves a little to the right side of the curve without AVL. That shows that when the early arrival occurs at the main Time Points, the arrival status with AVL is closer to on-time as compared to that without AVL.

25
0.00%
5.00%
10.00%
15.00%
20.00%
25.00%
30.00%
35.00%
40.00%
45.00%
-8 -3 2 7
DEVIATION FROM THE ACTUAL TIME
NU
MB
ER O
F IN
CID
ENTS
WITHOUT AVL WITH AVL
Figure 3.1 Arrival distribution at the main Time Points

26
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
16.00%
-25 -13.5 -8.5 -3.5 1.5 6.5 13.5
DEVIATION FROM THE SCHEDULED TIME
% N
UMBE
R O
F IN
CID
ENTS
WITHOUT AVL WITH AVL
Figure 3.2 Arrival distribution at the next Time Points after early arrival at the main Time Points
At the same time, average link travel time after the early arrivals at the main Time Points was increased by 0.11 minutes from 1.00 minute late to 1.11 minute late. The numbers referred here may look small and not significant, however, that is because earliness and lateness canceled each other in most cases. Also, since most scheduled link travel times are between two minutes to five minutes, one-minute change in link travel time can be considered as a big change. Figure 3.3 shows the distribution curves of the link travel times with and without AVL after early arrival occurs at the main Time Points. Unlike other distribution curves, although the curves are concentrated at the center, they have two peaks regardless of AVL implementation. This result can be explained that when the operation is ahead of schedule, there are mainly two groups of drivers: one who enjoys congestion-free driving conditions and the other who tries to keep the schedule. In other words, it is interpreted that AVL has not been very effective to some drivers at MTA, who do not pay attention to schedule adherence.

27
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
16.00%
-14.5 -5 0 5 10 15 22DEVIATION FROM THE SCHEDULED TIME
% N
UM
BER
OF
INC
IDEN
TS
WITHOUT AVL WITH AVL
Figure 3.3 Link travel time distribution after early arrival at the main Timepoints Variances of the arrival status and link travel times are also shown in Table 3, and it shows consistent results. The variances for the main Time Points and the next Time Points are reduced after AVL intervention because of the better schedule adherence at the stops. On the other hand, the variance of the link travel times with AVL intervention was increased, and this can be interpreted as some drivers were affected more by the AVL operation, while others were not affected much, so the link travel times are more spread with AVL intervention. 3.1.3 Tests of the Statistical Hypotheses In order to verify the impact of the AVL intervention, the significance tests for the selected cases were pursued and the results are shown in Table 3.3. Among many cases introduced in Table 3.1 and Table 3.2, the arrival status at the main Time Points, and arrival status at the next Time Points and link travel time after early arrival status at the main Time Points were selected for significance tests due to their expected direct impact of the AVL intervention. From the mean values and variances in the Table 3.2 and sample sizes in Table 3.1, one-tailed z-test to compare two means was applied due to the big sample size. For each case, statistical hypotheses were applied. As shown in Table 3.3, all null hypotheses were rejected, which means that averages of arrival statuses and link travel times without AVL intervention, than with intervention, are not the same at the 90 percent – 99 percent confident level.

28
Table 3.3 Tests of Statistical Hypotheses for the Various Cases
Main TP Early at main TPs
Next TP Link travel time Without
AVL (Case A)
µA = 0.31 σ2
A = 4.89 n = 120953
µA = -1.69 σ2
A = 8.52 n = 5378
µA = 1.00 σ2
A = 7.17 n = 5378
With AVL
(Case B)
µB = 0.28 σ2
B = 3.86 n = 102378
µB = -1.57 σ2
B = 10.21 n = 1808
µB = 1.11 σ2
B = 8.38 n = 1808
Statistical hypotheses
H0: µA= µB H1: µA> µB
H0: µA= µB H1: µA< µB
H0: µA= µB H1: µA< µB
Zcal Ztable (90%) (95%) (99%)
3.387 1.282 1.655 2.325
1.411 1.282 1.655 2.325
1.424 1.282 1.655 2.325
P-value 0.0003 0.0793 0.0772 Result Reject H0 at 99%
confident level Reject H0 at 90% confident level
Reject H0 at 90% confident level
µ: mean value (minute) σ2: variance (minute2) n: population size The results in Table 3.3 once made sure that with AVL intervention, average operation was improved and when the early arrival happens at the certain Time Point, link travel time becomes longer to keep the schedule on time. Consequently, the earliness at the next Time Point was reduced. While schedule adherence and link travel time after the early arrival were improved by the AVL, it is not clear that those after the early arrival were either improved or deteriorated. These results can be induced from the circumstance of the operation behind schedule. In most cases, operation behind the schedule is caused by the traffic congestion, and in most cases, there is nothing that drivers can do to improve schedule adherence. 3.2 Schedule Adherence and Drivers’ Operational Behavior – Disaggregated Data Analysis for the Peak Time and Off-peak Time Tables 3.4 and 3.5 show the frequency analysis for peak and off-peak just like Table 3.1 for aggregated analysis. On time performances are improved by AVL implementation during both peak and off-peak from 86.93 percent to 92.54 percent and from 86.98 percent to 92.75 percent, respectively. Although the results show that AVL intervention improved the schedule adherence for both peak and off-peak significantly, schedule adherences between peak and off-peak were not significantly different before AVL intervention (86.93 percent and 86.98 percent, respectively) and after AVL intervention (92.54 percent and 92.75 percent, respectively).

29
Although the results do not show the significant difference in on-time performance between off-peak and peak for the both with and without AVL intervention, the drivers’ behavior shows the different reaction to the AVL intervention between peak and off-peak hours. Without AVL intervention, compared to the off-peak hours, peak hours have a higher late ratio (8.97 percent to 8.35 percent) but also have a lower early ratio (4.10 percent to 4.66 percent). These results satisfy the common expectation, which is higher late ratio in peak hour due to potential congestion, and higher early ratio in off-peak hour due to the better traffic condition. Table 3.4 Schedule Adherence and Link Travel Times before and after AVL Intervention during Peak Hours Main Time Point Next Time Point Link Travel Time
Arrival status
Frequency (%)
Arrival status
Frequency (%)
Travel status
Frequency (%)
Before AVL
Early 1914 (4.1)
Early 1171 (61.2) Early 526 (27.5) Late 144 (7.5) Late 1144 (59.8) On-time 599 (31.3) On-time 244 (12.7)
Late 2646 (5.7)
Early 27 (1.0) Early 1208 (45.7) Late 2192 (82.9) Late 1064 (40.2) On-time 427 (16.1) On-time 374 (14.1)
On-time 42139 (90.2)
Early 573 (1.4) Early 1369 (3.3) Late 1374 (3.3) Late 1584 (3.7) On-time 40192 (95.3) On-time 39186 (93.0)
Total 46699 (100.0)
Total 46699 (100.0)
Total 46699 (100.0)
After AVL
Early 684 (1.8)
Early 410 (59.9) Early 189 (27.6) Late 78 (11.4) Late 409 (59.8) On-time 196 (28.7) On-time 86 (12.6)
Late 1435 (3.7)
Early 11 (0.8) Early 612 (42.7) Late 1262 (87.9) Late 593 (41.3) On-time 162 (11.3) On-time 230 (16.0)
On-time 36618 (94.5)
Early 223 (0.6) Early 598 (1.6) Late 521 (1.4) Late 646 (1.8) On-time 35874 (98.0) On-time 35374 (96.6)
Total 38737 (100.0)
Total 38737 (100.0)
Total 38737 (100.0)

30
Table 3.5 Schedule Adherence and Link Travel Times before and after AVL Intervention during Off-peak Hours Main Time Point Next Time Point Link Travel Time
Arrival status
Frequency (%)
Arrival status
Frequency %
Travel status
Frequency %
Before AVL
Early 3461 (4.7)
Early 2265 (65.4) Early 987 (28.5) Late 251 (7.3) Late 1959 (56.6) On-time 945 (27.3) On-time 515 (14.9)
Late 3623 (4.9)
Early 37 (1.0) Early 1663 (45.9) Late 3017 (82.3) Late 1419 (39.2) On-time 567 (15.7) On-time 541 (14.9)
On-time 67170 (90.4)
Early 848 (1.3) Early 2018 (3.0) Late 1742 (2.6) Late 2199 (3.3) On-time 64580 (96.1) On-time 62953 (93.7)
Total 74254 (100.0)
Total 74254 (100.0)
Total 74254 (100.0)
After AVL
Early 1122 (1.8) Early 727 (64.8) Early 313 (27.9) Late 110 (9.8) Late 620 (55.3) On-time 285 (25.4) On-time 189 (16.8)
Late 2311 (3.6)
Early 35 (1.5) Early 999 (43.2) Late 1995 (86.3) Late 955 (41.3) On-time 281 (12.2) On-time 357 (15.5)
On-time 60206 (94.6)
Early 304 (0.5) Early 797 (1.3) Late 774 (1.3) Late 973 (1.6) On-time 59128 (98.2) On-time 58436 (97.1)
Total 63639 (100.0)
Total 63639 (100.0)
Total 63639 (100.0)
With AVL intervention, reduced early incidents are the major improvement for both peak (4.10 percent to 1.76 percent) and off-peak (4.66 percent to 1.76 percent) times. Also, late incidents are also reduced for both peak (8.97 percent to 5.69 percent) and off-peak (8.35 percent to 5.5 percent) times. Overall, it is shown that on-time performance during off-peak was improved more than that peak, because of higher early incident in off-peak. This is due to the better traffic condition which could be improved with AVL intervention at the higher rate. 3.3 Travel Time Distribution and Running Time Analysis 3.3.1 Regression Analysis The regression analysis was performed separately for each of the 188 links studied. While each of these links was studied, results are discussed for only 164 links in this paper. These 164 links satisfied the following:
1. Observations on both weekdays and weekends 2. Observations from each of the times of day

31
3. Buses that were early, on-time, and late at the time point
For these links, the base for the regression analysis was overnight and on a weekend with the bus being on-time at the last time point. Summary statistics for the regressions for all the routes are shown in Table 3.6. Table 3.7 shows the 164 links in which all the variables are present with overnight as base and are categorized according to the four routes under study for this paper.
Table 3.6 Bus number and number of links having overnight as base variable for regressions
Bus # Number of Links 2 40 3 43 13 42 22 39
Table 3.7 Summary of results from regression analysis
Variable Number of links with significant
positive coefficients
Number of links with insignificant coefficients (zero)
Number of links with significant
negative coefficients
Average value of coefficients as percentage of
weekend overnight travel time
Morning and evening off peak
65 87 12 0.17
Daytime 107 45 12 0.22 Morning rush hour 120 34 10 0.33 Evening rush hour 121 34 9 0.38 Lag Status (Early) 125 18 21 0.66 Lag Status (Late) 68 29 67 0.08
Weekday 77 67 20 0.17 Goodness of Fit – R2 Statistics
Minimum 0 Mean 0.218
Maximum 0.65 The results for the remaining 24 links are not discussed in detail in the research as these links had different bases for regression and lack of substantial number of observations for the links to arrive at any realistic conclusions. The summary statistics of the regressions for the 24 links can be found in the Table 3.8. Table 3.8 Summary of Regression Analysis on links where some variables are not present Route 2 Weekend not present Overnight as base
Variable Positive No Effect Negative Percentage Morning and Evening off peak
0 0 1 -0.78
Daytime 1 0 0 1.13 Morning rush hour 0 0 1 -0.17

32
Evening rush hour 1 0 0 0.386 Lag Status (Early) 1 0 0 0.49 Lag Status (Late) 1 0 0 0.17 Missing Early, Evening off peak and Overnight with Daytime as the base
Variable Positive No Effect Negative Percentage Morning rush hour 0 1 0 0 Evening rush hour 0 1 0 0 Lag Status (Late) 0 0 1 -1 Weekday 0 1 0 0
Route 3 Weekend not present Overnight as base
Variable Positive No Effect Negative Percentage Morning and Evening off peak
3 0 0 0.10
Daytime 2 0 1 0.22 Morning rush hour 3 0 0 0.5 Evening rush hour 3 0 0 0.65 Lag Status (Early) 1 1 1 0.20 Lag Status (Late) 1 1 1 0.3 Route 13 Missing Evening Off Peak, morning peak, early, weekend and Overnight and Daytime as the base
Variable Positive No Effect Negative Percentage Evening rush hour 0 1 0 0 Lag Status (Late) 1 0 0 0.33 Missing Late and Weekend with Overnight as base
Variable Positive No Effect Negative Percentage Morning and Evening off peak
0 0 1 -1
Daytime 0 0 1 -1 Morning rush hour 0 0 1 -1 Evening rush hour 0 0 1 -1 Lag Status (Early) 0 1 0 0 Missing Overnight Evening off peak and weekend with Daytime as base
Variable Positive No Effect Negative Percentage Morning Peak 1 0 0 0.36 Evening Peak 1 0 0 0.43 Lag Status (Early) 1 0 0 0.48 Lag Status (Late) 0 0 1 -0.27
Route 22 Weekend not present Overnight as base
Variable Positive No Effect Negative Percentage Morning and Evening off peak
5 0 0 0.21
Daytime 4 0 1 0.40 Morning rush hour 4 0 1 0.72

33
Evening Peak 4 0 1 0.77 Lag Status (Early) 3 0 2 0.41 Lag Status (Late) 2 1 2 0.30 Missing Evening Off Peak, morning peak, weekend and Overnight and Daytime as the base
Variable Positive No Effect Negative Percentage Evening rush hour 0 1 0 0.069 Lag Status (Early) 1 0 0 0.628 Lag Status (Late) 0 0 1 -0.25 Missing Overnight and Evening rush hour with Daytime as base
Variable Positive No Effect Negative Percentage Morning and Evening off peak
0 0 1 -0.1
Morning rush hour 0 1 0 -0.08 Lag Status (Early) 1 0 0 0.19 Lag Status (Late) 0 0 1 -0.39 Weekday 0 1 0 0.094 Missing Evening Off Peak and Overnight and Daytime as the base
Variable Positive No Effect Negative Percentage Morning rush hour 1 6 0 0.04 Evening rush hour 1 5 1 0.029 Lag Status (Early) 4 0 3 0.79 Lag Status (Late) 5 0 2 0.68 Weekend 1 5 1 0.032 Missing Early, Evening off peak and Overnight with Daytime as the base
Variable Positive No Effect Negative Percentage Morning rush hour 0 1 0 0.004 Evening rush hour 0 1 0 -0.0013 Lag Status (Late) 0 0 1 -0.21 Weekday 0 1 0 -0.007
It was expected that all of the variables except lag status late would increase travel times on the link. It is assumed that congestion levels are lowest during the overnight hours and greater during the week than on weekends. If a bus was early at the last time point, it is assumed that the driver will likely slow down to correct this deviation from schedule on the next link. The division of time into 30-second intervals makes it less likely that this effect will be significant. If a bus is late at the previous time point, there are two possibilities. The first is that there is congestion and the bus will likely continue to lose time. The other possibility is that the driver will attempt to “make-up” time in an attempt to regain schedule adherence. These two conditions predict opposite signs on the variable lag status late. It is evident that all of the variables performed as expected. The results are presented in two forms. First, the number of links that had positive, insignificant, or negative coefficients for a particular variable; and, second, the average value of the coefficient

34
over all links for that variable. It takes longer for buses to travel a link during every period of the day than overnight. Using aggregate averages, early morning and late evening hours experience a 17 percent increase in travel times relative to overnight while afternoon rush hours experience a 38 percent increase in travel times relative to overnight values. All other time periods fall between these two figures. It is important to note that this is not a uniform increase for each link, but merely an average over the 164 links studied. The regressions found that more than 70 percent of the links, the rush hour variables were significantly positive. The early morning and late evening variables were significantly positive for 40 percent of the links, but had no effect for 53 percent of the links. While of less importance to this study, the results from the lag status variables are interesting. For lag status late, 41 percent of the links show a positive and significant coefficient while 41 percent show a negative and significant coefficient. This means that on some links, a late status at the previous time point seems to suggest congestion that continues to affect the bus relative to schedule. On other links, the bus travels more quickly to “make-up” time. The characteristics of the links that allow this to occur are not specifically modeled here. Analysis of which links fall into which category is something that should be of future concern to transit schedule researchers. The strongest affect of all the variables was lag status early. In 77 percent of the links, the coefficient on this variable was positive and significant. In addition, the average value of the coefficients implied a 66 percent increase in travel time when the bus was early at the last time point. This is nearly double the effect of rush hour congestion. This implies that drivers will make an effort to slow down to adhere to a schedule, confirming the results of previous sections. In the next few paragraphs the regressions for disaggregate links are discussed. The assumptions for the regressions are the same as they are for the aggregate four routes, except that the links are categorized according to the individual routes as shown in Table 3.9. The results for the regressions for disaggregate links are somewhat different as compared to the results for the aggregate links. Using aggregate averages, the travel time for the early morning and late evening were increased by more than 25% for routes 2 and 13, and 4.0 to 5.0 percent for routes 3 and 22. Another interesting observation is seen for the daytime variable for route 22. Table 3.9 shows that the daytime variable for route 22 experienced a decrease in travel time by 4.2 percent. The daytime variable for other routes experienced an increase in travel time by more than 25 percent as compared to the overnight travel time. The evening rush hour variable for routes 2 and 22 had a significant effect on travel time. It showed that the travel times increased by 54 percent and 25 percent relative to the overnight travel time values, which are significantly different from the aggregate rush hour values for the 164 links.

35
Table 3.9 Summary of Results from regressions categorized by routes having all variables with overnight as base Route 2
Variable Positive No Effect Negative Percentage Evening off peak
22 14 4 0.27
Daytime 26 10 4 0.32 Morning Peak 27 10 3 0.30 Evening Peak 32 6 2 0.54 Lag Status (Early)
32 0 8 0.80
Lag Status (Late)
21 3 16 0.26
Weekday 24 9 7 0.22
Route 3 Variable Positive No Effect Negative Percentage
Evening off peak 19 21 3 0.045 Daytime 29 12 2 0.256 Morning Peak 35 7 1 0.327 Evening Peak 30 12 1 0.370 Lag Status (Early) 39 1 3 0.670 Lag Status (Late) 16 11 16 -0.00221 Weekday 21 16 6 0.123 Route 13
Variable Positive No Effect Negative Percentage Evening off peak 13 29 0 0.30 Daytime 29 13 0 0.35 Morning Peak 29 11 2 0.46 Evening Peak 30 9 3 0.34 Lag Status (Early) 33 6 3 0.83 Lag Status (Late) 18 7 17 0.06 Weekday 20 19 3 0.20

36
Route 22
Variable Positive No Effect Negative Percentage Evening off peak 11 23 5 0.048 Daytime 23 10 6 -0.042 Morning Peak 29 6 4 0.230 Evening Peak 29 7 3 0.256 Lag Status (Early)
21 11 7 0.345
Lag Status (Late) 13 8 18 0.017 Weekday 12 23 4 0.110 From the regressions for the individual routes, it was found that more than 65 percent of the links had a significantly positive effect on the travel time for individual routes during morning and evening rush hours. The strongest effects of all the variables for route 2 were lag status early and evening rush hours. In about 80 percent of the links the coefficients for these variables were significantly positive. For route 3, more than 90 percent of the links had significantly positive coefficients for the morning rush hour variables. It was also found that the travel time during the morning rush hours increased by 46 percent. The early morning and late evening were significantly positive for 55 percent of the links and had no effect for 35 percent of the links for route 2. But the results found in the other routes were quite different for the early morning and late evening variables. For route 3, the coefficients for the variables were significantly positive for 45 percent of the links but had no effect for 50 percent of the links. For route 13 and 22 the variables had no effect on over 60 percent of the links. Among all the routes the strongest effect of all the variables for the links was lag status early for route 3. It was found that 91 percent of the links had coefficients significantly positive and experienced an increase in travel time by 67 percent, which indicates that whenever a bus was early at previous time point, attempts were made to slow down the bus to be on the scheduled arrival time at the next time point. The lag status for route 22 had the weakest positive effect for the links relative to the lag status for the other routes. It showed that the coefficients for only 54 percent of the links were significantly positive. For route 2, 60 percent of the links had the weekday variable significantly positive. In addition to this the travel time was increased by 22 percent as compared to the overnight weekend variable. Route 22 experienced no effect for the weekday variable for about 59 percent of the links. The effects of weekday variables for the other routes were between route 2 and route 22. The lag status late variable had coefficients for 33 percent of the links significantly positive and 46 percent of the links significantly negative for route 22. This indicates that for 46 percent of the links the bus attempts were made to drive faster and reach early at the next time point, however it took longer travel time to cover the 33

37
percent of the links. This may have been due to bad weather, congestion or breakdown of the bus or some other reasons. For route 2, 53 percent of the links had significantly positive coefficients for the lag status late variable and 40 percent of the links experienced a significantly negative effect. Aggregate averages can often be misleading and ambiguous. The results from the regressions show that each link has its own characteristics that extend to how congestion seems to affect the average travel time. It also shows that congestion levels can be different for different routes. Aggregate averages can often be misleading. Scheduling problems that use aggregate data to determine the effects of times of day on travel time will be using data that is not sufficient for the task. The difference between using aggregate data and disaggregate data can be noticed from the regression tables and the above discussions. As a first step in correcting this problem, the density function that describes the link travel time was estimated. 3.3.2 Results from Distributions The distributions that were estimated were the Poisson, and Generalized Error Distribution (GED). The GED is a more general form of the Normal distribution that allows for varying levels of peakedness and skewness. In all of our links, the normal distribution was discarded in favor of the more peaked GED. Figures 3.4 through 3.9 show results from several representative links for the Poisson and GED density function estimations. The values of the parameters that are obtained are presented in the in Table 3.10

38
Figure 3.4 Density functions for Link 23

39
Figure 3.5 Density functions for Link 115

40
Figure 3.6 Density functions for Link 66

41
Figure 3.7 Density functions for Link 139

42
Figure 3.8 Density functions for Link 165

43
Figure 3.9 Density functions for Link 117 Table 3.10 Parameters for GED distributions and number of rows per link for all Routes
Route 2 Link Number of Rows µ σ p
1 1466 5.00 0.81 1.00 2 1568 5.27 2.30 1.54 3 1467 4.04 0.92 1.47 4 1418 1.50 0.80 1.55

44
Link Number of Rows µ σ p 5 1369 2.22 1.17 1.65 6 1358 1.44 0.91 1.79 7 1343 1.00 0.34 1.00 8 1408 2.00 0.41 1.00 9 1418 2.00 0.30 1.00 10 1469 2.77 0.85 1.49 11 1492 1.84 1.21 1.73 12 1484 4.40 1.78 2.70 13 1589 4.00 0.41 1.00 14 1402 2.00 0.20 1.00 15 1319 3.00 0.20 1.00 16 1326 1.00 0.31 1.00 17 1330 1.00 0.31 1.00 18 1252 1.00 0.28 1.00 19 1245 1.00 0.42 1.00 20 1271 5.79 0.72 1.66 21 1300 3.00 0.68 1.00 22 181 4.38 3.17 8.32 23 83 1.00 0.01 1.00 24 1309 3.00 0.52 1.00 25 1283 5.63 0.91 1.83 26 1266 2.55 0.78 2.16 27 1232 1.00 0.28 1.00 28 1313 1.00 0.17 1.00 29 1365 1.44 0.77 1.73 30 1412 2.48 0.85 2.36 31 1442 2.00 0.19 1.00 32 1566 3.68 0.78 2.00 33 1525 4.19 1.02 2.28 34 1519 2.72 0.89 2.36 35 1529 1.64 0.80 1.92 36 1528 1.61 0.80 1.89 37 1489 1.00 0.32 1.00 38 1454 2.00 0.21 1.00 39 1467 2.00 0.28 1.00 40 1489 2.00 0.59 1.00 41 1512 2.00 0.42 1.00 42 1458 2.33 1.00 1.70

45
Route 3
Link # Number of Rows µ σ p 43 928 3.00 0.52 1.00 44 862 3.00 0.32 1.00 45 1204 1.00 0.21 1.00 46 1104 3.81 0.95 2.13 47 1307 1.00 0.47 1.00 48 1364 2.00 0.13 1.00 49 1379 3.00 0.59 1.12 50 1388 1.00 0.19 1.00 51 1430 3.00 0.39 1.00 52 1553 4.00 0.25 1.00 53 1448 2.00 0.18 1.00 54 1441 1.00 0.33 1.00 55 1483 2.83 0.69 2.34 56 1496 2.00 0.19 1.00 57 1485 3.70 0.85 2.00 58 1467 2.59 0.77 1.92 59 1441 3.20 1.01 2.93 60 1443 2.00 0.35 1.00 61 1464 3.84 0.95 1.42 62 1450 2.00 0.52 1.00 63 1423 1.00 0.36 1.00 64 1577 3.00 0.76 1.00 65 353 11.99 1.87 1.30 66 122 1.00 0.29 1.00 67 344 7.00 0.66 1.00 68 131 2.00 0.24 1.00 69 1578 2.00 0.79 1.00 70 1547 3.76 1.27 2.08 71 1563 4.05 1.50 2.23 72 1527 2.00 0.16 1.00 73 1512 1.00 0.41 1.00 74 1445 1.26 0.93 1.23 75 1431 3.00 0.60 1.00 76 1416 3.67 0.79 1.62 77 1432 3.00 0.30 1.00 78 1355 3.88 0.78 1.70 79 1387 1.00 0.40 1.00 80 1337 2.00 0.37 1.00 81 1451 3.00 0.64 1.00 82 1449 2.00 0.31 1.00 83 1318 2.56 0.87 1.49 84 1294 2.00 0.38 1.00 85 1362 3.00 0.47 1.00

46
Link # Number of Rows µ σ p 86 1315 2.00 0.15 1.00 87 1192 1.00 0.34 1.00 88 1261 4.35 1.33 1.73
Route 13
Link # Number of Rows µ σ p 89 129 11.26 3.64 2.97 90 69 5.00 0.04 1.00 91 68 6.00 0.03 1.00 92 1946 2.00 0.35 1.00 93 2145 5.95 0.99 1.60 94 2073 3.04 0.69 1.72 95 2096 1.00 0.23 1.00 96 2072 7.73 1.56 2.60 97 2044 1.34 0.65 1.76 98 2061 1.00 0.25 1.00 99 2053 2.53 0.68 2.75
100 2097 1.00 0.17 1.00 101 2110 4.67 1.15 3.01 102 1117 1.72 0.63 2.05 103 986 1.00 0.13 1.00 104 964 1.00 0.08 1.00 105 943 7.95 1.23 1.53 106 957 1.00 0.22 1.00 107 964 2.76 0.94 5.01 108 944 4.00 0.49 1.00 109 180 4.31 1.52 2.51 110 755 1.00 0.38 1.00 111 945 1.00 0.15 1.00 112 918 4.66 1.15 2.58 113 929 1.00 0.13 1.00 114 944 2.00 0.18 1.00 115 927 2.00 0.33 1.00 116 937 3.33 0.95 1.16 117 974 10.07 2.78 3.61 118 942 5.00 0.45 1.00 119 887 2.55 0.63 3.01 120 935 6.27 1.43 2.97 121 2043 4.79 1.50 3.39 122 2016 1.00 0.13 1.00 123 2058 1.00 0.13 1.00 124 2040 2.73 1.10 2.58 125 2013 1.00 0.49 1.00 126 2080 7.00 0.59 1.00

47
Link # Number of Rows µ σ p 127 2049 3.30 0.64 2.01 128 2086 1.00 0.25 1.00 129 2042 7.22 2.47 3.72 130 137 13.00 0.02 1.00 131 927 3.61 0.71 1.68 132 903 3.00 0.18 1.00 133 919 3.00 0.11 1.00
Route 22 Link # Number of Rows µ σ p
134 308 1.00 0.07 1.00 135 319 1.00 0.07 1.00 136 316 1.00 0.08 1.00 137 321 3.00 0.08 1.00 138 731 2.00 0.18 1.00 139 759 1.00 0.15 1.00 140 778 4.00 0.25 1.00 141 832 4.87 1.28 3.10 142 865 2.99 0.90 2.55 143 876 3.32 0.71 2.31 144 860 5.49 0.89 1.86 145 860 1.00 0.15 1.00 146 872 1.57 0.74 1.84 147 882 1.82 0.73 2.15 148 895 5.33 1.55 3.41 149 890 2.94 0.85 1.68 150 850 1.00 0.25 1.00 151 866 4.00 0.39 1.00 152 855 4.02 2.09 4.03 153 311 12.43 1.14 1.43 154 289 3.00 0.17 1.00 155 292 9.04 2.28 2.70 156 292 2.00 0.15 1.00 157 226 2.00 0.06 1.00 158 153 2.00 0.04 1.00 159 281 8.00 0.32 1.00 160 276 5.00 0.09 1.00 161 287 6.00 0.35 1.00 162 89 3.00 0.15 1.00 163 99 2.00 0.10 1.00 164 97 2.00 0.01 1.00 165 299 9.31 2.11 2.54

48
Link # Number of Rows µ σ p 166 550 3.00 0.57 1.00 167 280 7.00 0.11 1.00 168 288 8.00 0.39 1.00 169 229 1.00 0.07 1.00 170 306 1.00 0.10 1.00 171 317 3.00 0.19 1.00 172 308 1.00 0.21 1.00 173 322 7.29 0.75 2.20 174 815 3.00 0.26 1.00 175 820 2.00 0.19 1.00 176 838 3.75 1.17 3.10 177 854 1.00 0.24 1.00 178 862 3.00 0.34 1.00 179 868 5.94 1.83 3.80 180 872 3.64 1.27 3.66 181 894 5.08 1.23 2.95 182 906 3.25 0.77 1.92 183 900 2.00 0.18 1.00 184 872 6.17 3.30 7.30 185 863 2.00 0.31 1.00 186 848 2.00 0.16 1.00 187 781 1.00 0.44 1.00 188 374 3.00 0.08 1.00
It is obvious that the GED provides a much better fit to the data than the Poisson. In fact, the GED provided a better fit to the travel time distribution than any distribution we could find. Further research for the formal tests of this is being done. For the example below, the GED distribution is used. The evaluation carried out below uses information from a constant parameter density function. It was shown that in looking at congestion, parameters that are allowed to vary can increase the predictive power of the analysis [10]. This is an extension of the work that is currently being carried out. Even with this simple representation of the GED density function, the fit is surprisingly good for a large number of links. Figures 3.4 and 3.5 depict two links that are typical of the good fit from the GED function. Figures 3.6 and 3.7 indicate two more links that show one of the problems encountered in the scheduling example below. Note that, despite the good fit of the density function, the right-hand tail of the distribution is to the right of the data. This is caused by two factors. First, the data are extremely discrete while the density function is continuous. When there is some variance in the arrival times, such as for the links depicted in Figures 3.7 and 3.8, this is not a concern. When there is very little variance, it leads to a distribution that seems to overstate the tails of the data. This arises from fitting the few observations that do lie outside the norm. Second, the density function is estimated with only one set of parameters. Complicated density function

49
analysis is currently being performed on the links and this problem with the tails is mitigated with this approach. In a complicated density function all of the parameters are allowed to change with the conditions. In the case of transit travel time analysis, the parameters would vary with time of day. This allows the density function to have more than one peak (of differing sizes if needed) and each peak can be narrower. This removes the excess tail when it is caused by the fixed parameters rather than the discrete nature of the data. Figures 3.8 and 3.9 present two links that were typical of those that were not fit well with a simple density function. This was the smallest category of links, but points out a problem with the simple density functions employed and the discrete data. Note that both of these links have multiple peaks. In addition, Figure 3.8 is spread out and figure 3.9 has a very strong peak at the far right of the travel time distribution. This is likely a result of the discrete nature of the data. However, it is also possible that complex density functions are needed to explain these links satisfactorily. With a complex GED density function, it is possible for the density function to have multiple peaks as well. The link for FRED-CATH to FRED-FONT is typical of a situation where this is possible. The second peak is likely for the buses during the half of the day that experiences longer travel times (daytime, morning rush and afternoon rush). The first peak, and scattered observations, is likely for the buses that run the rest of the day (in essence very early morning, late evening and overnight). A two-peaked GED density function could very easily approximate these data by having different parameters for the two periods. Preliminary work implies that this improvement is found in most links. The problem of the discrete nature of the data remains however. 3.4 A Scheduling Example 3.4.1 Analysis with All Time Points As discussed in methodology section, the analysis in this chapter will be pursued based on the assumptions, which are no early departure with AVL intervention and schedule adherence at all time points. Taking the results of the density function estimation and some basic scheduling principles, it is possible to illustrate how these density function estimates can be used to improve the scheduling process. First, it is necessary to determine the value of schedule adherence that we want to pursue. The example presented here will look at several different levels of schedule adherence and will show the costs of each in terms of frequency, given a fixed number of vehicles for the route. There are several assumptions made for this example. The most important is the assumption that no vehicle will depart a measured time point early. This means that it is assumed that AVL devices are deployed and that drivers will wait at the measured time point until the scheduled time. There are no early buses at these measured time points. In addition, every link is assumed to be a measured time point. This is not necessary. In fact, on many routes, there may be only a few time points where schedule adherence is an issue of concern (namely those time points where bus routes cross and an interchange is established).

50
Tables 3.11 and 3.12 detail the characteristics of the routes and links used in the analysis. For each of the time points on this hypothetical route, an actual link from the MTA data is assigned to represent the link. Please note that the schedule time necessary for each benchmark of on-time performance is higher than would be necessary if on-time performance was measured at fewer of the links. Table 3.11 Bus routes information (Source: Maryland Mass Transit Administration) Route Starting Point Ending Point Links used for calculating
the travel time in graphs Direction
2 Route 40 & Geipe Rd.
Downtown 24 – 42 and 1 0
2 Downtown Route 40 & Geipe Rd
2 – 21 1
3 Sheppard Pratt Inner Harbor 44-64 0 3 Inner Harbor Sheppard Pratt 69-88 and 43 1 13 Clinton &
Newgate Walbrook Junction
121-130 0
13 Walbrook Junction
Clinton & Newgate
90-109 1
22 Bank & Grundy Mondawmin Metro Station
134-161 0
22 Mondawmin Metro Station
Bank & Grundy 169-188 1
Table 3.12 Starting and ending time points of links for all routes

51
Route 2 Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name
1 249 4409 Saratoga Lexington Baltimore Charles 2 4420 249 Fayette Charles Saratoga Lexington 3 4424 4420 Fayette Eutaw Fayette Charles 4 4436 4424 Fayette Green Fayette Eutaw 5 4619 4436 N/A Fayette Green 6 3404 4619 Fayette Care N/A 7 253 3404 Fayette Gilmore Fayette Care 8 255 253 Fred Pula Fayette Gilmore 9 256 255 Fred Cathedral Fred Pula
10 257 256 Fred Font Fred Cathedral 11 258 257 Fred Fred Fred Font 12 260 258 Fred Agus Fred Fred 13 263 260 Ceda Thor Fred Agus 14 264 263 Fred Beec Ceda Thor 15 265 264 Fred North Fred Beec 16 266 265 Fred Over Fred North 17 267 266 Fred Para Fred Over 18 268 267 Fred Baltimore Fred Para 19 269 268 Fred Ingl Fred Baltimore 20 309 269 N/A Fred Ingl 21 304 309 Rout Roll N/A 22 237 263 Will Bris Ceda Thor 23 331 267 Para Loop Fred Para 24 308 304 Roll Emdo Geip Kt 25 219 308 Fred Mell Roll Emdo 26 230 219 Fred Belt Fred Mell 27 231 230 Fred Para Fred Belt 28 233 231 Fred Cher Fred Para 29 232 233 Fred Nort Fred Cher 30 234 232 Fred Beec Fred Nort 31 238 234 Thor Ceda Fred Beec 32 240 238 Fred Augu Thor Ceda 33 242 240 Fred Frhi Fred Augu 34 243 242 Fred Font Fred Frhi 35 244 243 Fred Cathedral Fred Font 36 245 244 Prat Pula Fred Cathedral 37 247 245 Guli Lomb Prat Pula 38 3426 247 Balt Care Guli Lomb 39 4474 3426 Balt Mlk Balt Care 40 4438 4474 Balt Gree Balt Mlk 41 4477 4438 Balt Howaard Balt Gree 42 4409 4477 Balt Charles Balt Howard

52
Route 3
Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name 43 6960 6950 Cromwell Bridge Lochraven Joppa 44 6955 6960 Lochraven Joppa Cromwell Bridge 45 6902 6955 Lochraven Natu Lochraven Joppa 46 5948 6902 Lockraven Taylor Lochraven Natu 47 6948 5948 Lochraven Sach Lockraven Taylor 48 6911 6948 Lochraven Loch Lochraven Sach 49 6904 6911 Lochraven Sherwood Lochraven Loch 50 6905 6904 Lochraven Belvedere Lochraven Sherwood 51 6700 6905 Lochraven Stone Lochraven Belvedere 52 6703 6700 Lochraven Green Lochraven Stone 53 5608 6703 Alameda 33rd Lochraven Green 54 5613 5608 33rd Lochraven Alameda 33rd 55 5605 5613 33rd Green 33rd Lochraven 56 5617 5605 St. Paul 32nd 33rd Green 57 4500 5617 St. Paul 25th St. Paul 32nd 58 4509 4500 St. Paul North Ave St. Paul 25th 59 4499 4509 St Paul Biddle st St. Paul North Ave 60 4212 4499 Cathedral Eager St St Paul Biddle st 61 4498 4212 Cathedral Saratoga Cathedral Eager St 62 4213 4498 Hopkins Arena Cathedral Saratoga 63 4497 4213 Hopkins Pratt Hopkins Arena 64 3542 4497 Charles Pratt Hopkins Pratt 65 4950 5900 Shepphard Pratt Joppa Prov 66 6910 6945 Goucher Taylor Lochraven Sayw 67 5900 6950 Shepphard Pratt Lochraven Joppa 68 6701 5624 Lochraven Hart Lochraven Winf 69 4480 3542 Charles Redwood Charles Pratt 70 4496 4480 Charles Saratoga Charles Redwood 71 4469 4496 Charles Read Charles Saratoga 72 4463 4469 Charles Biddle Charles Read 73 5568 4463 Charles Penn Charles Biddle 74 4501 5568 Charles North Ave Charles Penn 75 4547 4501 Charles 25th st Charles North Ave 76 4467 4547 Charles 32nd St Charles 25th st 77 5609 4467 33rd Greenmount Charles 32nd St 78 5602 5609 Alameda 33rd 33rd Greenmount 79 5618 5602 Alameda 35th Alameda 33rd 80 5622 5618 Loch Green Alameda 35th 81 5623 5622 Lochraven Northwood Loch Green

53
82 5624 5623 Lochraven Winf Lochraven Northwood 83 5625 5624 Lochraven Belvedere Lochraven Winf 84 5626 5625 Lochraven Northern Parkway Lochraven Belvedere 85 6901 5626 Lochraven Loch Lochraven Northern Parkway 86 6945 6901 Lochraven Sayw Lochraven Loch 87 6946 6945 Lochraven HDSC Lochraven Sayw 88 6950 6946 Lochraven Joppa Lochraven HDSC
Route 13 Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name
89 501 501 Security Boulevard Security Boulevard 90 504 501 S. S West Security Boulevard 91 1522 504 Kern Wins S. S West 92 2502 1521 North Denison St Kern Wins 93 3513 2502 North More North Denison St 94 4544 3513 North Care North More 95 3502 4544 North Penn North Care 96 4511 3502 North Ave Howard Street North Penn 97 4542 4511 North Charles North Ave Howard Street 98 4541 4542 North Ave St. Paul St North Charles 99 5508 4541 North Ave Greenmount Ave North Ave St. Paul St
100 5509 5508 North Home North Ave Greenmount Ave 101 5513 5509 North Wolf North Home 102 6503 5513 North Pratt North Wolf 103 5528 6503 North Milton Ave North Pratt 104 6515 5528 Milton Federal North Milton Ave 105 6430 6515 Baltimore Ellwood Milton Federal 106 6421 6430 Baltimore Eastern Ave Baltimore Ellwood 107 6429 6421 East East Baltimore Eastern Ave 108 6302 6429 Clin Toon East East 109 6303 6302 Clin Newg Clin Toon 110 7301 6302 Canton Clin Newg 111 5428 5513 Wolf Lafa North Wolf 112 5418 5428 Wolf Monument St Wolf Lafa 113 5417 5418 Wolf Mcel Wolf Monument St 114 5416 5417 Wolf Baltimore St Wolf Mcel 115 5415 5416 Wolf Eastern Ave Wolf Baltimore St 116 5440 5415 Fells Point Fells Point 117 6508 6431 Milt North Eastern Ave Baltimore St 118 6428 7301 East East Clintoon 119 6431 6428 Eastern Ave Baltimore St East East 120 5512 6410 North Wolf Washington Monument St 121 5506 5512 North Home North Wolf

54
Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name 122 5505 5506 North Greenmount Ave North Home 123 5507 5505 North Barc North Greenmount Ave 124 4543 5507 North Charles North Barc 125 4510 4543 North Ave Howard Street North Charles 126 3501 4510 North Ave Pennsylvania Ave North Ave Howard Street 127 3503 3501 North Ave Ruxton North Ave Pennsylvania Ave 128 3512 3503 North More North Ave Ruxton 129 2734 3512 Clif Garr North More 130 1521 2734 Wind Kern Clif Garr 131 6411 5440 Washington Eastern Ave Fells Point 132 6409 6411 Washington St Baltimore St Washington Eastern Ave 133 6410 6409 Washington Monument St Washington st Baltimore St
Route 22 Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name 134 7417 7409 Eastern Ave Rapp Bay View 135 7404 7417 Eastern Ave Ponca St Eastern Ave Rapp 136 7412 7404 Eastern Ave Newk Eastern Ave Ponca St 137 7403 7412 Bank Grun Eastern Ave Newk 138 6413 7403 Bank Conk Bank Grun 139 6405 6413 Highland Ave Bank Bank Conk 140 6511 6405 Highland Ave Monument St Highland Ave Bank 141 4895 6511 Edison Sinc Highland Ave Monument St 142 6614 4895 Erdman Ave Belair Rd Edison Sinc 143 6604 6614 Hardford Rd 32nd St Erdman Ave Belair Rd 144 5601 6604 33rd Alameda Hardford Rd 32nd St 145 5614 5601 33rd Lochraven 33rd Alameda 146 5619 5614 33rd Elle 33rd Lochraven 147 5605 5619 33rd Greenmount Ave 33rd Elle 148 4706 5605 University Parkway and 40th St 33rd Greenmount Ave 149 4707 4706 41st Falls Rd University Parkway and 40th St 150 3710 4707 41st St Edge 41st Falls Rd 151 3602 3710 Park Circ 41st St Edge 152 2601 3602 Liberty Heights Park Circ 153 2407 2601 Luth Hosp Liberty Heights 154 2413 2407 Edmd Fran Luth Hosp 155 2306 2413 Cato Wilk Edmd Fran 156 2302 2306 Cato Bens Cato Wilk 157 1204 2302 Bens Joh Cato Bens 158 1206 1204 Cato Joh Bens Joh 159 3553 1206 Pratt Stat Cato Joh 160 5120 3553 Pratt Hand Pratt Stat

55
Link Time Point Lag Timepoint Timepoint Name Lag Timepoint Name 161 5112 5120 Curt Spru Pratt Hand 162 1203 1206 Viol A.M Cato Joh 163 1205 1207 Bens Joh Cato Joh 164 1202 1206 Viol P.M. Cato Joh 165 2410 2305 Edmd P.Gr Cato Wilk 166 3609 2407 Mond Stat Luth Hosp 167 5121 5112 Pata Hand Curt Srpu 168 1207 6511 Cato Joh High Monu 169 2303 1205 Cato Bens Bens Joh 170 2305 2303 Cato Wilk Cato Bens 171 2411 2410 Luth Hosp Edmd P. Gr 172 2414 2411 Lafa Brad Luth Hosp 173 3608 2414 Gywn Tiog Lafa Brad 174 2605 3609 Liberty St Druid Park Drive Mond Stat 175 3604 2605 Park Circ Liberty St Druid Park Drive 176 3711 3604 41 St Buen Park Circ 177 4709 3711 41 St Falls Rd 41 St Buen 178 4710 4709 University Parkway and 40th St 41 St Falls Rd 179 5609 4710 33rd St Greenmount Ave University Parkway and 40th St 180 5610 5609 33rd Alameda 33rd St Greenmount Ave 181 6607 5610 32nd Hardford Rd 33rd Alameda 182 6610 6607 Erdman Ave Belair Rd 32nd Hardford Rd 183 4812 6610 Edison Sinc Erdman Ave Belair Rd 184 6531 4812 Monument St Highland Ave Edison Sinc 185 6401 6531 Highland Ave Baltimore St Monument St Highland Ave 186 6417 6401 Bank Conk Highland Ave Baltimore St 187 7402 6417 Goug Grun Bank Conk 188 7413 7402 East Newk Goug Grun
We look at seven benchmarks of schedule adherence. The benchmarks are for 50, 75, 85, 90, 95, 99 and 99.9 percent on-time performance. For each benchmark, the appropriate percentile is calculated from the estimated GED distribution. Tables 3.13 – 3.16 contain the results for this example for the different routes studied in the paper. The table presents the amount of time necessary to generate the appropriate on-time performance at each time point as well as the total time for travel for each of the direction. The total times in the last row of the tables represent the aggregate travel times from all the links used in the paper. Figures 3.10 – 3.17 show the travel times at different percentiles for the whole route or for a segment of the route. Since all the links were not selected for estimating the travel times, the travel times were determined only for a continuous segment of the route.

56
TABLE 3.13 Predicted Travel Times at different Percentages for On-time performance for Route 2
(min) Link
#
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th % travel time
Predicted 75th % travel time
Predicted 85th % travel time
Predicted 90th % travel time
Predicted 95th % travel time
Predicted 99th % travel time
Predicted 99.9th %
travel time
1. 6.51 10.02 5 5.56 5.98 6.31 6.87 8.18 10.06 2. 8.84 10.65 5.27 6.84 7.78 8.46 9.51 11.64 14.24 3. 4.02 10.70 4.04 4.67 5.05 5.33 5.76 6.66 7.77 4. 1.42 10.01 1.50 2.04 2.36 2.59 2.95 3.68 4.56 5. 2.27 12.05 2.22 3.01 3.48 3.80 4.31 5.30 6.49 6. 1.21 11.12 1.43 2.05 2.40 2.63 2.99 3.69 4.50 7. 1.11 9.97 1.0 1.23 1.40 1.54 1.77 2.31 3.08 8. 1.82 16.12 2.0 2.28 2.49 2.66 2.94 3.60 4.55 9. 1.98 14.80 2.0 2.20 2.36 2.48 2.68 3.16 3.84 10. 2.77 15.50 2.77 3.35 3.70 3.96 4.35 5.17 6.18 11. 1.45 18.43 1.84 2.66 3.12 3.45 3.94 4.91 6.05 12. 4.77 13.68 4.40 5.58 6.15 6.52 7.03 7.91 8.81 13. 4.23 10.88 4.0 4.28 4.49 4.65 4.93 5.59 6.52 14. 2.0 10.55 2.0 2.13 2.23 2.31 2.45 2.76 3.21 15. 2.92 4.47 3.0 3.14 3.24 3.32 3.46 3.79 4.25 16. 1.0 5.73 1.0 1.21 1.37 1.50 1.70 2.19 2.9 17. 1.1 7.36 1.0 1.21 1.37 1.50 1.72 2.23 2.95 18. 1.1 8.54 1.0 1.19 1.33 1.45 1.64 2.09 2.73 19. 1.21 11.97 1.0 1.28 1.50 1.67 1.96 2.62 3.58 20. 5.79 11.01 5.79 6.28 6.56 6.76 7.07 7.68 8.41 Total (Dir 1) 51.01 47.26 56.63 62.38 66.58 73.16 86.98 104.62 51.01 21. 3.45 10.38 3.0 3.47 3.82 4.09 4.56 5.66 7.22 22. 2.3 14.36 4.38 6.32 7.10 7.52 7.99 8.60 9.06 23. 1.0 1.20 1.0 1.0 1.01 1.02 1.02 1.04 1.07 24. 3.05 12.07 3.0 3.36 3.62 3.84 4.20 5.04 6.24 25. 5.5 7.87 5.63 6.25 6.59 6.83 7.19 7.88 8.67 26. 2.53 6.0 2.55 3.077 3.35 3.53 3.79 4.28 4.81 27. 1 3.89 1.0 1.19 1.34 1.45 1.64 2.09 2.74 28. 1 4.26 1.0 1.11 1.20 1.27 1.38 1.64 2.02 29. 1.4 6.59 1.44 1.96 2.25 2.46 2.77 3.39 4.11 30. 2.37 7.93 2.48 3.05 3.34 3.52 3.79 4.28 4.79 31. 2 10.81 2.0 2.12 2.22 2.30 2.42 2.72 3.15 32. 3.63 9.0 3.68 4.20 4.49 4.68 4.96 5.49 6.08 33. 4.37 7.27 4.19 4.87 5.22 5.45 5.78 6.38 7.02 34. 2.66 4.37 2.72 3.31 3.61 3.81 4.09 4.59 5.13 35. 1.45 8.17 1.63 2.17 2.47 2.67 2.97 3.54 4.18 36. 1.46 8.90 1.61 2.15 2.44 2.64 2.94 3.52 4.18 37. 1 8.79 1.0 1.22 1.39 1.52 1.74 2.27 3.01 38. 2 7.63 2.0 2.15 2.25 2.33 2.48 2.82 3.30 39. 2.1 9.13 2.0 2.19 2.33 2.45 2.64 3.10 3.74 40. 1.66 11.68 2.0 2.41 2.71 2.96 3.36 4.32 5.68 41. 2.21 12.43 2.0 2.29 2.50 2.67 2.96 3.63 4.60 42. 2.25 13.03 2.32 3.0 3.39 3.67 4.08 4.90 5.87 Total 51.15 50.25 58.637 63.7 67.38 73.07 85.1 100.45 51.15

57
Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th % travel time
Predicted 75th % travel time
Predicted 85th % travel time
Predicted 90th % travel time
Predicted 95th % travel time
Predicted 99th % travel time
Predicted 99.9th %
travel time
(Dir 0) Total 107.91
104.96 125.21 137.13 145.65 158.96 186.47 221.52

58
Table 3.14 Predicted Travel Times at different Percentages for On-time performance for Route 3
(min) Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
43. 3.7 8.19 3.0 3.36 3.62 3.83 4.19 5.03 6.22 44. 3.2 3.94 3.0 3.22 3.38 3.51 3.73 4.25 4.99 45. 1.4 9.05 1.0 1.14 1.24 1.33 1.47 1.80 2.28 46. 3.85 4.42 3.81 4.45 4.78 5.01 5.33 5.94 6.60 47. 1.32 5.27 1.0 1.32 1.56 1.75 2.08 2.83 3.92 48. 2.1 6.74 2.0 2.09 2.16 2.22 2.31 2.53 2.84 49. 3.09 5.58 3.0 3.40 3.68 3.90 4.27 5.08 6.19 50. 1.2 7.27 1.0 1.13 1.22 1.30 1.43 1.73 2.16 51. 2.77 9.58 3.0 3.27 3.46 3.62 3.89 4.51 5.40 52. 3.94 7.34 4.0 4.17 4.3 4.41 4.58 4.99 5.57 53. 2.0 4.62 2.0 2.12 2.21 2.28 2.41 2.69 3.11 54. 1.2 8.32 1.0 1.23 1.40 1.53 1.77 2.30 3.07 55. 2.85 8.29 2.83 3.30 3.54 3.69 3.91 4.31 4.74 56. 2.0 9.69 2.0 2.13 2.22 2.30 2.43 2.73 3.17 57. 3.79 8.48 3.7 4.27 4.58 4.78 5.09 5.67 6.31 58. 2.9 9.20 2.58 3.10 3.39 3.58 3.87 4.42 5.05 59. 3.25 8.12 3.20 3.86 4.18 4.37 4.64 5.10 5.56 60. 2.18 7.90 2.0 2.24 2.42 2.56 2.81 3.38 4.19 61. 3.68 8.53 3.84 4.49 4.89 5.19 5.65 6.62 7.82 62. 1.92 8.34 2.0 2.36 2.63 2.84 3.20 4.04 5.24 63. 1.15 9.41 1.0 1.24 1.43 1.57 1.82 2.40 3.22 64. 3.29 10.52 3.0 3.52 3.91 4.22 4.75 5.97 7.72 Total (Dir 0) 53.08 50.96 58.05 62.58 65.96 71.44 83.29 99.15 53.08 65. 11.58 13.31 11.98 13.27 14.09 14.71 15.71 17.83 20.58 66. 1.19 4.92 1.0 1.2 1.34 1.46 1.66 2.12 2.78 67. 6.78 11.62 7.0 7.46 7.80 8.07 8.52 9.59 11.12 68. 2.38 3.81 2.0 2.16 2.28 2.38 2.54 2.92 3.47 69. 2.41 11.91 2.0 2.54 2.94 3.26 3.81 5.07 6.88 70. 3.85 10.60 3.76 4.62 5.07 5.37 5.82 6.65 7.56 71. 3.99 9.91 4.04 5.06 5.58 5.92 6.42 7.34 8.33 72. 2 7.33 2.0 2.11 2.19 2.26 2.37 2.63 3.0 73. 1.37 6.87 1.0 1.28 1.49 1.65 1.94 2.59 3.53 74. 1.36 11.69 1.26 1.90 2.32 2.64 3.16 4.29 5.78 75. 2.63 14.25 3.0 3.41 3.72 3.97 4.39 5.36 6.75 76. 3.64 13.63 3.67 4.21 4.52 4.75 5.09 5.78 6.60 77. 2.96 13.68 3.0 3.20 3.35 3.47 3.68 4.16 4.84 78. 3.87 5.09 3.88 4.41 4.71 4.93 5.25 5.90 6.65 79. 1.1 8.29 1.0 1.27 1.48 1.64 1.92 2.57 3.49 80. 1.76 3.36 2.0 2.25 2.44 2.59 2.84 3.43 4.28 81. 2.69 8.27 3.0 3.44 3.76 4.02 4.46 5.49 6.96 82. 2.16 8.48 2.0 2.21 2.36 2.49 2.70 3.19 3.89 83. 2.47 8.65 2.56 3.15 3.52 3.78 4.19 5.03 6.06 84. 1.75 8.57 2.0 2.26 2.46 2.61 2.88 3.50 4.38 85. 2.75 7.85 3.0 3.32 3.56 3.76 4.08 4.84 5.93

59
Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
86. 2.0 3.34 2.0 2.10 2.18 2.24 2.35 2.60 2.95 87. 1.2 6.71 1.0 1.23 1.40 1.54 1.77 2.31 3.08 88. 4.1 8.40 4.35 5.25 5.77 6.13 6.67 7.75 6.01 Total (Dir 1) 53.76 53.52 62.58 68.44 72.85 79.98 95.51 113.17 53.76 Total
128.77 126.53 144.88 156.72 165.58 180.01 211.38 253.40

60
Table 3.15 Predicted Travel Times at different Percentages for On-time performance for Route 13
(min) Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
89. 11.06 1.55 11.26 13.67 14.80 15.51 16.49 18.13 19.77 90. 5.5 2.89 5.0 5.02 5.04 5.05 5.08 5.14 5.22 91. 6.6 1.47 6.0 6.02 6.03 6.04 6.06 6.11 6.18 92. 2.5 4.42 2.0 2.25 2.42 2.57 2.81 3.38 4.20 93. 6 5.5 5.95 6.63 7.02 7.31 7.74 8.62 9.67 94. 3.06 1.88 3.04 3.50 3.77 3.96 4.24 4.80 5.45 95. 1.1 5.58 1.0 1.15 1.27 1.36 1.52 1.88 2.40 96. 8.25 4.73 7.72 8.77 9.28 9.60 10.06 10.87 11.71 97. 1.32 7.80 1.34 1.78 2.03 2.21 2.47 2.98 3.58 98. 1.15 5.48 1.0 1.17 1.29 1.39 1.57 1.96 2.53 99. 2.61 2.38 2.53 2.98 3.20 3.34 3.53 3.86 4.20 100. 1.1 5.24 1.0 1.11 1.20 1.27 1.38 1.65 2.03 101. 4.53 4.31 4.67 5.43 5.78 6.0 6.31 6.82 7.32 102. 1.68 2.41 1.71 2.13 2.36 2.51 2.73 3.15 3.61 103. 1.1 2.84 1.0 1.09 1.16 1.21 1.30 1.52 1.82 104. 1.2 2.90 1.0 1.05 1.09 1.12 1.18 1.30 1.48 105. 8.05 1.80 7.95 8.78 9.28 9.65 10.21 11.36 12.76 106. 1.2 5.01 1.0 1.15 1.27 1.35 1.51 1.87 2.38 107. 2.62 5.70 2.76 3.36 3.61 3.76 3.93 4.20 4.43 108. 4.25 4.98 4.0 4.33 4.58 4.78 5.11 5.89 7.01 109. 4.55 4.24 4.31 5.32 5.82 6.14 6.60 7.41 8.26 Total (Dir 1) 68.37 64.98 73.02 77.5 80.62 85.34 94.77 106.24 68.37 110. 1.7 1.60 1.0 1.26 1.46 1.61 1.87 2.48 3.36 111. 1.2 5.92 1.0 1.10 1.18 1.24 1.34 1.58 1.93 112. 4.7 2.61 4.65 5.42 5.79 6.03 6.37 6.96 7.58 113. 1.1 4.30 1.0 1.08 1.15 1.20 1.28 1.49 1.77 114. 2.1 6.35 2.0 2.12 2.22 2.29 2.42 2.71 3.14 115. 2.3 5.50 2.0 2.22 2.39 2.53 2.76 3.28 4.04 116. 3.77 0.75 3.32 3.98 4.43 4.77 5.34 6.58 8.26 117. 10.75 5.23 10.07 11.88 12.70 13.19 13.84 14.88 15.87 118. 5 1.91 5.0 5.31 5.54 5.72 6.03 6.76 7.80 119. 2.75 1.24 2.54 2.96 3.15 3.27 3.44 3.72 4.0 120. 6.15 6.09 6.27 7.21 7.66 7.94 8.32 8.97 9.62 121. 4.69 4.31 4.78 5.77 6.21 6.49 6.85 7.45 8.03 122. 1.2 3.23 1.0 1.08 1.15 1.20 1.29 1.49 1.77 123. 1.1 5.63 1.0 1.09 1.15 1.21 1.30 1.51 1.81 124. 2.58 4.85 2.73 3.46 3.82 4.05 4.38 4.95 5.54 125. 1.31 4.57 1.0 1.34 1.59 1.80 2.13 2.92 4.04 126. 7.35 6.15 7.0 7.40 7.71 7.94 8.35 9.30 10.65 127. 3.73 2.78 3.29 3.73 3.96 4.12 4.35 4.78 5.27 128. 1.2 6.13 1.0 1.17 1.29 1.39 1.56 1.96 2.53 129. 7.85 3.13 7.22 8.83 9.55 9.98 10.54 11.44 12.29 130. 13 0.73 13.0 13.01 13.02 13.03 13.04 13.07 13.11 Total 44.01 42.02 46.88 49.45 51.21 53.79 58.87 65.04 44.01

61
Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
(Dir 0) 131. 4.25 1.40 3.61 4.09 4.37 4.56 4.86 5.45 6.15 132. 3.5 4.32 3.0 3.12 3.22 3.29 3.42 3.72 4.14 133. 3.1 6.85 3.0 3.07 3.13 3.17 3.25 3.43 3.68 Total
175.81 166.81 188.56 200.30 208.28 220.32 243.92 272.53

62
Table 3.16 Predicted Travel Times at different Percentages for On-time performance for Route 22
(min) Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel
time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
134. 1.5 6.17 1.0 1.05 1.09 1.12 1.17 1.29 1.46 135. 1 4.70 1.0 1.05 1.09 1.11 1.16 1.27 1.44 136. 1 4.74 1.0 1.05 1.09 1.12 1.17 1.29 1.47 137. 3 4.98 3.0 3.05 3.09 3.13 3.19 3.32 3.51 138. 2.4 4.24 2.0 2.12 2.21 2.28 2.40 2.69 3.09 139. 1 3.55 1.0 1.1 1.17 1.23 1.33 1.57 1.91 140. 3.9 6.68 4.0 4.17 4.29 4.39 4.56 4.96 5.53 141. 5 6.85 4.86 5.70 6.1 6.34 6.67 7.22 7.77 142. 2.86 8.44 2.98 3.58 3.87 4.06 4.33 4.80 5.29 143. 3.32 8.80 3.32 3.80 4.04 4.20 4.42 4.84 5.28 144. 5.52 3.48 5.49 6.09 6.42 6.64 6.99 7.64 8.39 145. 1.2 4.30 1.0 1.1 1.18 1.24 1.34 1.58 1.92 146. 1.5 6.42 1.57 2.07 2.35 2.55 2.84 3.39 4.04 147. 1.72 7.50 1.82 2.31 2.57 2.74 2.99 3.45 3.96 148. 5.21 7.50 5.32 6.34 6.80 7.08 7.45 8.06 8.65 149. 2.81 4.27 2.94 3.51 3.85 4.08 4.44 5.15 5.99 150. 1.1 7.88 1.0 1.17 1.30 1.40 1.57 1.97 2.55 151. 3.91 9.12 4.0 4.27 4.47 4.63 4.90 5.53 6.43 152. 4.5 6.20 4.02 5.37 5.95 6.30 6.79 7.46 8.11 153. 13.11 6.43 12.43 13.21 13.69 14.05 14.60 15.76 17.20 154. 3.0 3.80 3.0 3.11 3.20 3.27 3.38 3.65 4.04 155. 9.23 3.42 9.04 10.55 11.29 11.76 12.42 13.55 14.71 156. 2.1 3.76 2.0 2.1 2.17 2.24 2.34 2.58 2.92 157. 2.1 3.98 2.0 2.04 2.07 2.10 2.15 2.25 2.40 158. 2.0 1.96 2.0 2.02 2.05 2.07 2.09 2.16 2.26 159. 7.6 3.20 8.0 8.22 8.38 8.51 8.73 9.25 9.99 160. 5.0 2.54 5.0 5.06 5.11 5.15 5.21 5.37 5.58 161. 6.5 2.09 6.0 6.24 6.42 6.56 6.80 7.37 8.17 Total (Dir 0) 103.09 100.79 111.45 117.31 121.35 127.43 139.42 154.06 103.09 162. 3.0 3.37 3.0 3.10 3.18 3.24 3.34 3.59 3.94 163. 2.0 1.01 2.0 2.07 2.12 2.16 2.23 2.40 2.63 164. 2.0 1.03 2.0 2.0 2.01 2.01 2.02 2.04 2.06 165. 9.67 2.0 9.31 10.71 11.41 11.85 12.50 13.60 14.76 166. 3.3 6.0 3.0 3.39 3.68 3.91 4.31 5.23 6.54 167. 7.6 2.5 7.0 7.07 7.13 7.17 7.25 7.42 7.67 168. 8.1 5.20 8.0 8.27 8.47 8.63 8.90 9.53 10.43 169. 1.1 2.18 1.0 1.05 1.08 1.11 1.16 1.28 1.44 170. 1.1 5.55 1.0 1.07 1.12 1.16 1.23 1.39 1.63 171. 3 2.84 3.0 3.13 3.22 3.30 3.43 3.73 4.15 172. 1.1 3.89 1.0 1.14 1.24 1.33 1.47 1.80 2.28 173. 7.38 2.79 7.29 7.79 8.05 8.22 8.47 8.94 9.44 174. 3.3 5.27 3.0 3.18 3.31 3.42 3.60 4.02 4.62 175. 1.92 6.83 2.0 2.13 2.23 2.31 2.44 2.75 3.19 176. 3.67 4.77 3.75 4.52 4.87 5.10 5.40 5.91 6.40

63
Link #
Mean Scheduled time
Observed Percent of Buses
Late
Predicted 50th
percentile travel time
Predicted 75th
percentile travel time
Predicted 85th
percentile travel
time
Predicted 90th
percentile travel time
Predicted 95th
percentile travel time
Predicted 99th
percentile travel time
Predicted 99.9th
percentile travel time
177. 1.1 9.25 1.0 1.16 1.28 1.38 1.54 1.92 2.46 178. 3.5 8.35 3.0 3.23 3.40 3.54 3.77 4.31 5.08 179. 5.67 8.64 5.94 7.13 7.66 7.97 8.39 9.04 9.66 180. 3.61 7.11 3.64 4.47 4.84 5.06 5.36 5.83 6.27 181. 5.15 6.82 5.08 5.90 6.28 6.52 6.86 7.42 7.98 182. 3.26 5.63 3.24 3.77 4.05 4.24 4.53 5.08 5.71 183. 2 7.22 2.0 2.12 2.21 2.28 2.40 2.68 3.08 184. 6.36 4.93 6.17 8.21 9.03 9.48 10.00 10.70 11.24 185. 2.1 8.46 2.0 2.21 2.37 2.50 2.72 3.22 3.94 186. 2 7.54 2.0 2.11 2.19 2.25 2.36 2.62 2.99 187. 2 6.53 1.0 1.30 1.52 1.70 2.0 2.70 3.70 188. 3 1.87 3.0 3.05 3.09 3.12 3.17 3.29 3.47 Total (Dir 1) 62.32 60.11 68.67 73.04 75.99 80.3 88.63 98.73 62.32 Total
201.08 195.27 216.90 228.54 236.48 248.41 272.03 301.00

64
Figure 3.10 Travel times at different percentiles
Hence only those links were selected which occurred along the length of the route on a continuous basis. For example consider a route which has links a-b-c-d-e-f-g-h and there is a branch at f, f-x-y-z and the links f-x-y were selected from the branch and a-b-c-d-e and g-h were selected from the main line, then only the travel times for links a-b-c-d-e were used for the graphs for estimation of the route travel time or segment travel time.
Comparision of Travel Times at different Percentiles Route 2 Direction 1
0
20
40
60
80
100
120
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Link #
Trav
el T
ime
in m
in
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

65
Figure 3.11 Travel times at different percentiles
Comparision of Travel Times at different Percentiles for Route 3 Direction 0
0
20
40
60
80
100
120
44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64
Link #
Trav
el T
ime
in m
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

66
Figure 3.12 Travel times at different Percentiles
Comparision of Travel times at different Percentiles Route 3 Direction 1
0
20
40
60
80
100
120
69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 43
Link #
Trav
el T
ime
in m
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

67
Figure 3.13 Travel times at different Percentiles
Comparision of Travel Times at different Percentiles for Route 13 Direction 0
0
10
20
30
40
50
60
70
121 122 123 124 125 126 127 128 129 130
Link #
Trav
el T
ime
in M
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

68
Figure 3.14 Travel Times at different Percentiles
Comparision of Travel Times at different Percentiles for Route 13 Direction 1
0
20
40
60
80
100
120
90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109
Link #
Trav
el T
ime
in m
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%
1

69
Figure 3.15 Travel times at different Percentiles
Comparision of travel times at different Percentiles for Route 22 Direction 0
0
20
40
60
80
100
120
140
160
180
134
136
138
140
142
144
146
148
150
152
154
156
158
160
Link #
Trav
el T
ime
in M
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

70
Figure 3.16 Travel times at different Percentiles
Comparision of Travel Times at different Percentiles for Route 22 direction 1
0
20
40
60
80
100
120
169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188
Link #
Trav
el ti
me
in m
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

71
Figure 3.17 Travel times at different Percentiles Figures 3.18 – 3.25 portray the trade-off between schedule adherence and travel time. They also describe the relationship between on-time performance and time required to cover the whole route or a segment of the route. The graph shows that the greater the time taken to cover the entire route, the higher the on-time performance. From this information the number of cycles can also be determined using frequencies. Frequencies are calculated on 24 hours of operation for a single bus with no turnaround time between cycles. Adjustments to either the hours of operation or the turnaround time would not
Comparision of Travel Times at different Percentiles Route 2 Direction 0
0
20
40
60
80
100
120
23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 1
Link #
Trav
el T
ime
in m
inut
es
Cum AvgCum 50%Cum 75%Cum 85%Cum 90%Cum 95%Cum 99%Cum 99.9%

72
change these results qualitatively. For example, Figure 3.18 for route 2 direction 0, shows that for an on-time performance of 99.9 percent requires 17 percent more one way travel time than a 99 percent on-time performance and 15.8 percent more one way travel time than a 95 percent on-time performance. A 95 percent on-time performance allows 9 percent higher travel time than a 90 percent on-time performance and an 85 percent on-time performance allows 6.3 percent higher travel time than an 85 percent on-time performance. To achieve an 85% on-time performance, a 9.2 percent higher travel time is required than to achieve a 75 percent on-time performance. In other words, the higher the on-time performance, the higher is the travel time required. So, the trade off is quite clear, and becomes very steep at high levels of on-time performance. From the graphs shown in Figures 3.10 – 3.17, scheduled traveled time lies between the median and the 75th percentile for all the routes. The graphs also show the time required to cover different sections of the route at different percentiles. With the help of these graphs, the time required to cover a particular link or a particular segment of the route, or the whole route, can be determined using the different percentiles which can be used in scheduling. The origins and destinations for all the routes or sections of routes used for the graphs are shown in Table 3.11.

73
Figure 3.18 Route travel time versus on-time performance (Route 2 direction 0)
Figure 3.19 Route travel time versus on-time performance (Route 2 direction 1)

74
Figure 3.20 Route travel time versus on-time performance (Route 3 direction 0)
Figure 3.21 Route travel time versus on-time performance (Route 3 direction 1)

75
Figure 3.22 Route travel time versus on-time performance (Route 13 direction 0)
Figure 3.23 Route travel time versus on-time performance (Route 13 direction 1)

76
Figure 3.24 Route travel time versus on-time performance (Route 22 direction 0)
Figure 3.25 Route travel time versus on-time performance (Route 22 direction 1) It should be noted that the density functions used in this example tend to overstate the travel time at high percentile figures. This is because the distribution is “spread out” rather than moving. If the parameters of the distributions were allowed to vary with conditions (as the average travel times did in the regression) this problem would be

77
removed. This type of analysis is currently being performed and the results should be substituted within a month. With such an analysis, each link, under each condition (time of day, day of week, etc.), has its own travel time for each percentage on-time examined. Another interesting point to be mentioned about these links is that the data show approximately 5-18 percent of the buses running late for these links. Some of these buses are quite late. Looking at the behavior of one link, link 63 in the analysis, we can see why the results are so different from the scheduled time. The average scheduled time for this link was 1.2 minutes. The average actual travel time was almost 1.55 minutes. The maximum observed time was 15 minutes. In the data there may have been some express buses that did not stop at some stops, but the time at the stops where the buses did not stop was recorded which would make the averages lower than normal. Thus, the presence of a 0 second link time would be critical in drawing the distribution and calculating the averages. While there were over 1400 observations for this link, it is clear that the presence of a 15-minute observation was critical in drawing the distribution “upward” in travel time. A further consideration in this example is the problematic definition of “late”. The definition of late used by the MTA is a bus that is more than three minutes behind schedule. The definition used for our analysis was a bus that is late if it is one second behind schedule. Now we consider different definitions of late to justify our discussion. Obviously, some sort of consideration must be given to this definition and how it affects the scheduling. Different definitions of lateness should be considered to justify the discussion. Four definitions of late are considered in this example. They are one second, 30 seconds, one minute and three minutes. Some links from Tables 3.11 – 3.16 are discussed. Table 3.17 shows the percentages of buses that are estimated to be late for the different definitions of late. It can be seen how the ambiguous different definitions of the term “late” can be from the above table. For example, considering link 15; if the scheduled time is increased by 30 seconds or if 30 seconds is selected as the cut off time for late, then the change in the percentage of buses arriving late is changed by 39 percent as compared to one second as the cut off time. Now if the scheduled travel time is increased by one minute or if the cut off time is changed to one minute then it would mean that almost all the buses arrived on time. If we look at link 61, if the bus is late by one second then 55 percent of the buses would be late but if the scheduled time was increased by one minute, the number of buses arriving late would change by approximately 38.5 percent, which means that about 16.5 percent of the buses would be late. If the scheduled link time were increased by three minutes, then only one percent of the buses would be late. These differences are quite significant. Thus the tolerance limit for late should be properly defined. The above table shows to determine the schedule time on a disaggregate basis i.e. the scheduled time should be analyzed link by link for different percentiles. Aggregation of the results for disaggregate analysis can be done to estimate the total travel time which would also help in determining the frequencies, headways, number of cycles required during the day and fleet size.

78
Table 3.17 Percentages of buses arriving late at different definitions of lateness
Link # 1 second late 30 seconds 1 min 3 min 10. 50% 40% 14% 0.4% 14. 50% 10% 0.4% 0% 15. 54% 15% 0.4% 0% 31. 50% 10% 0.2% 0% 32. 51% 63% 11% 0% 40. 65% 50% 15% 4% 41. 27% 9% 3% 0% 56. 50% 10% 0.5% 0% 61. 55% 45% 16.5% 1% 63. 40% 14% 3% 0% 64. 35% 20% 9% 0.7% 72. 50% 8% 0% 0% 77. 51% 16% 2% 0% 90. 0% 0% 0% 0%
108. 27% 15% 4% 0% 133. 20% 1% 0% 0% 138. 5% 0.9% 0% 0% 141. 41% 33% 17% 0% 177. 26% 14% 0.8% 0% 188. 50% 1% 0% 0%
It is possible to use a zero tolerance definition for lateness, but this is not practical at the link level. At a more aggregate level this might make more sense. A more realistic approach would only demand on-time performance at certain time points. These time points would be denoted critical time points. Most likely, these would be time points associated with interchanges. As the zero tolerance for lateness is applied to fewer of the time points, the cycle length required is reduced. This is because it is possible for a bus to be ahead of schedule and maintain this status for several links. This possibility would reduce the amount of time necessary for the “superlink”. Analyses of this type are currently being carried out and will likely be added in the next month. Preliminary results show a considerable decrease in the required scheduling time to achieve any particular on-time performance. 3.4.2 Analysis with Super Links Table 3.18 shows that by grouping the links to form a super link and by calculating the superlink travel times in different ways, a subsequent reduction in travel time can be obtained. In the first row of the table, the travel time for superlink Saratoga Lexington Market – Fred Ingl for the above stated percentiles is obtained by adding the individual links on the route. In the second row, travel time for the superlink is obtained at different percentiles is obtained by the difference in the arrival times at main time point and lag time point, respectively, at all times of the day described in case 2. The third row shows the travel time for the superlink at different percentiles is obtained by calculating the difference in arrival times at the main time point lag timepoint during one time period of

79
the day (morning off peak in this case) as discussed in case 3. The time periods are grouped together based on average scheduled times. From the analysis, on-time performances for superlink vary by the method used for calculations. Table 3.19 shows the percentage of buses late obtained by using different methods of estimation of superlink travel time. It is seen that maximum on-time performance is achieved by grouping the superlinks according to different times of the day using method 3 described in the methodology section. By calculating the superlink travel time as a difference between the main time point and the lag time point at all times of the day increases the on-time performance relative to the on-time performance obtained by merely adding the travel times for each individual links. But, the change is not quite significant. By grouping and estimating superlink travel times according to different times of day, a significant change in running times and on-time performance is achieved. In Table 3.19, it can be seen that in order to achieve a 50 percent on-time performance, for case 3, the running time for the superlink is reduced by 3.52 percent as compared to case 1 and 2.40 percent for case 2. To achieve an on-time performance of 75 percent, there is a reduction in running time by 16.81 percent for case 3 relative to case 1, and a reduction of 15.41 percent when compared to case 2. It is also seen that 23.18 percent more time is required to cover the superlink for case 1 as compared to case 3 for an on-time performance of 85 percent. A 90 percent on-time performance allows 27.13 percent higher travel time for case 1 and a 21.91 percent higher travel time for case 2 as compared to case 3. For an on-time performance of 95 percent, a 32.40 percent higher running time is required for case 3 and a 24.60 percent more running times is required compared to case 3. A 99 percent on-time performance allows 41 percent lesser travel time for case 3 as compared to case 1 and a 26.14 percent lesser travel time for case 3 relative to case 2. To achieve an on-time performance of 99.9 percent, 50.40 percent higher travel time is required for case 1 and 34.22 percent higher travel time is required for case 2 when compared to case 3. This is because for the individual link, the superlink running time is the sum of the running times for the individual links at different percentages resulting in higher superlink travel times but for case 2 and 3, the running times are not the cumulative of the individual links which result in a lower superlink travel times. For the definitions of lateness, it is seen that by calculating superlink travel time according to different times of day, a 96.62 percent of on time performance is achieved if the bus runs at scheduled time. If the tolerance for lateness is three minutes, then 99.7 percent on time performance can be achieved, as compared to 72 percent on time performance obtained by calculating the travel times at all times of the day and 69 percent on time performance which was obtained by aggregating the individual link travel times at a 3 min late tolerance. It is also seen that by allowing the tolerance at 1 min for case 3, 98.42 percent of the buses would be on time. The percentage change in on-time performance at between case 1 and case 3 is due to the addition of late tolerances for each individual link as seen in case 1 and the fact that the on time performance for case 1 is for all times of the day where as the on-time performance for case 3 is only for morning off peak period. The complex GED can be used to estimate on time performance as shown in case 3 as it has multiple peaks that group the travel times according to the averages (or different times of the day) which also help in reducing the number of cycles

80
per day. Thus, a more reliable on-time performance can be achieved by grouping the travel times at different times of the day.
Table 3.18 Travel time for superlink Saratoga Lexington Market – Fred Ingl using different ways for calculation
Link
Mean Scheduled
time
Predicted 50th % travel time
Predicted 75th % travel time
Predicted 85th % travel time
Predicted 90th % travel time
Predicted 95th % travel time
Predicted 99th % travel time
Predicted 99.9th %
travel time
Cumulative 1. Link
Travel time 45.22 41.47 50.35 55.82 59.82 66.09 79.30 99.21
2. Super Link for all times of the
day
45.22 41.10 49.50 53.42 55.82 59.23 63.35 74.81
3. Super link for morning off peak
45.22 40.1 41.87 42.88 43.59 44.67 46.79 49.20
Table 3.19 Comparison of on-time performance results using different methods of travel time estimation for different definitions of late for superlink Saratoga Lexington-Fred Ingl
Link 1 second late 30 seconds late 1 min late 3 min late 1. Link Travel
time 60% 61% 63% 69%
2. Super Link for all times of the
day 60.70% 62.10% 64.05% 72%
3. Super link for morning off peak 96.62% 97.67% 98.42% 99.70%

81
4. CONCLUSION In this research, three major categories can be discussed: 1) data collection, 2) scheduling adherence, and 3) running time analysis. 4.1 Data Collection The data has been collected through AVL system and abnormal arrival data is sent to the main storage system. In this process, there can be a few barriers to completing a proper analysis. The first potential problem is about how to send and store data. Currently, the AVL system only sends abnormal arrival data. To make an analysis, it was necessary to assume that the data, which is not sent, is on time. For this reason, the newly generated set of data, which includes received abnormal arrival data and assumed normal arrival data, was screened with log-on data, log-off data and error data files. This process required tremendous effort, and still the quality of the data set was not guaranteed. In order to reduce unnecessary efforts to clean up the data and analyze high quality data, better data collection methods should be provided. There can be a several suggestions on this matter. One is to install a hard disk in the AVL system in individual buses. This would require extra cost, however this will store all the possible data safely and correctly. Another way is to send all the information to the main system. Although this case will increase the quality of data, still it may not be very accurate because of the potential errors in transaction of the data. Also, this suggestion will require a bigger storage in the main system. The final suggestion is using APC (Automatic Passenger Counting) equipment to install arrival data for the buses with APC. Currently, some buses at MTA have APC equipment and it is expected that APC will be installed on more buses. Since APC records arrival time when buses stop at the station, unless a bus does not stop at the station, APC can record the arrival data accurately. The second potential problem is the 30-second interval for recording the data. This discreteness may not look serious and important, but it can create a larger window for on-time performance. Currently, arrival between one-minute early and three-minute late is defined as on-time performance. However, with this discreteness, less than one minute and 15-second arrival is considered as an on-time arrival. Likewise, less than three- minute and 15-second late arrival is also considered as an on-time arrival. Altogether, the time window for on-time arrival becomes four minutes and 30 seconds from four minutes. This increased time window can exaggerate on-time performance. This discreteness can cause another difficulty in estimating link travel time. In this research, the discreteness of collected data was smoothed by estimating density function. However, because estimating density function for arrival requires hard efforts for most transit agencies, it is recommended to shorten discreteness. The third potential problem is the location of the time points. Ideally, two Time Points for each station are recommended for the accurate analysis to measure exact arrival time and departure time. However, currently there is only one Time Point around a station, and

82
that is not even on the identical location with a station. This means it was necessary to assume that the arrival time and departure time are almost identical and the locations of Time points and locations of the stations are identical as well. 4.2 Schedule Adherence The impact of the AVL system on schedule adherence and its analysis were discussed. From the results of the analysis, it was shown that regardless of AVL intervention, operators were willing to adjust their operating speeds to keep the schedule within the given condition according to the survey in Table 1. This willingness was presented as changed link travel time and its distribution in Tables 2, 3, and 4, and Figures 2, 3, and 4. In terms of schedule adherence, with AVL intervention, the overall schedule adherence was improved by 4.2 percent from 90.4 percent to 94.6 percent. However, for those who did not keep the schedule, AVL did not have much affect as shown in link travel time status in the Tables 2, 3, and 4. Although improved schedule adherence with AVL was proved with a 99 percent confidence level, after early arrival at the main Time points, improvement with AVL for both arrival status at the next Timepoints and link travel times was accepted with only 90 percent confidence level. When late arrival occurred at the main Timepoint, the results were inconclusive. As mentioned, when the vehicle is behind schedule, which implies traffic congestion, it is not easy to keep the schedule. However, when the vehicle is ahead of schedule, keeping the schedule is much easier. Operators can do this by slowing down or staying at the stop. Even though the vehicle may not be back on the schedule right after the abnormal arrival, increased link travel time should have been shown, if Operators are willing to meet the schedule. Although a fairly high rate of increased link travel time (57.8 percent without AVL intervention and 57.0 percent with AVL intervention), under expected better than normal traffic conditions due to the early arrival in the previous Time Points, assures that the operators tried to keep the schedule, not much impact from AVL intervention to slow down the operation was found. As mentioned, two groups of Operators (two peaks of the distribution curves) were observed in Figure 4, when the operation was ahead of schedule, and this result clearly shows that current AVL implementation does not intervene operation effectively. The results in this paper can be summarized as following statements:
- AVL gives operators better information regarding scheduling adherence as shown in
Table 2, 3, and 4, and Figure 2, 3, and 4. - AVL helps some operators who are willing to adjust their operating speeds to keep
the schedule. - The improvement of schedule adherence by AVL was accepted at 99 percent
confidence level. - However, for some operators, AVL did not actively intervene operations when the
operation is ahead of schedule as shown as two peaks in Figure 4.

83
- In order to improve the operators’ behavior after the abnormal arrival status, more active communication and intervention by the dispatcher as well as more education for the operators is suggested.
- Schedule adherence after AVL were improved during both peak and off-peak hours. - Although on-time performances during peak and off-peak hours before AVL were
similar, the components of results during peak hours and those during off-peak hours were different.
- Before AVL, in comparison with off-peak hours, a greater numbers of late incidents and a lesser number of early incidents were found during peak hours due to the potential congestion.
- The numbers of early incidents during both peak and off-peak hours were reduced to the same level after AVL.
- The number of late incidents during both peak and off-peak hours was reduced. - The less number of late incidents was found during off-peak hours while the number
of late incidents during peak hours was reduced at the faster rate. 4.3 Running Time Analysis As discussed in the earlier section, there is major difficulty in conducting a proper analysis because of current data collection methods, which is one-minute interval for the on-time performance and then 30-second interval from the initial one-minute interval. In order to minimize distortion of the discrete data, instead of using discrete arrival data, running time estimation using estimated density function was applied in this research. Because of the continuous property of the statistics generated from density functions, even with less data, more realistic and less distorted estimates of travel time can be achieved compared to using discrete data. The MTA bus link travel time data was best described with a GED density function. Using this function allows a smoothing of the discrete data supplied by the AVL device and appropriate travel times can be obtained. First, the scheduling example shows several interesting results that deserve consideration. It also shows that using averages merely for scheduling could often be incorrect and misleading as it was found out in the example. It was also shown that scheduling should be done for different hours of the day rather than grouping peak hours. In the scheduling example first, due to the assumption, which is no early departure by the AVL intervention, the trade-off between on-time performance and the travel times are clearly defined. Knowledge of the specific relationship between these two quality measures can allow transit planners to make decisions for frequency effected by cycle time and on-time performance. Second, the analysis shows that the more disaggregate the level of on-time performance required, the higher are the travel times required. This argues for a level of on-time performance that is utilized at a level above the most disaggregate possible. On-time performance may be best measured at the “superlink” level, where only critical time points (such as major interchanges) are measured as shown in the running time analysis example for superlinks. By grouping travel times according to different times of the day,

84
more reliable estimations of link travel time at superlink level can be obtained which is one of the major factors in achieving a higher on-time performance at lesser running times. Since drivers and passengers do not have specific idea for schedule for all Time Points, the super link idea would make sense. Better grouping and estimations of link travel times at different percentiles are possible by using complex GED functions. ACKNOWLEGEMENTS This project was funded by the Mass Transit Administration (MTA) in the State of Maryland and National Transportation Center (NTC) at the Morgan State University in Baltimore, MD. The author would like to thank William Susie in Orbital Transportation Management Systems (TMS) for his support in data collection, as well as peers David Hill, Randal Reed and Nimish Desai.

85
REFERENCE 1. Zhao, Fang and L. David Shen, Planning and Implementation of Automatic
Vehicle Location Systems for Public Transit, Leheman Center for
Transportation Research, Florida International University, Miami, FL,
Department of Transportation, Office of Research and Special Programs,
Washington, DC, 1997.
2. Jones, William S., ITS Technology in Public Transit: Deployment & Benefits.
Transit ITS Compendium, Chapter Five, 1997.
3. Okunieff, Paula E., AVL Systems for Bus Transit, Synthesis of Transit Practice
24, Transit Cooperative Research Program, Transportation Research Board,
Washington DC, 1997.
4. Wilson, Nigel, Transit ITS Application: Dispatch/Service Management.
Transit ITS Compendium, Chapter Three, 1997.
5. MDOT Mass Transit Administration , Transit Route Profiles 1998, Office of
Planning and Programs, Service Planning Section, 1999.
6. MDOT Mass Transit Administration, AVL On-Time Performance Report,
Office of Engineering, Systems Engineering Department, 1993
7. MDOT Mass Transit Administration, A Primer on MTA's Automatic Vehicle
Location (AVL) System, Office of Engineering, Systems Engineering
Department, 1994.
8. Orbital Transportation Management Systems, Dispatcher Guide for
SmartTrack System, Columbia, MD, 1996.
9. Lee, Young-Jae, Kyung Soo Chon, David Hill, and Nimish Desai, Impact of
AVL System on Schedule Adherence for MTA Bus System, Transportation
Research Board Annual Meeting, No. 01-1984, Washington DC, 2001.
10. Reed, R. Projecting Landside Congestion at BWI Airport. Report 0102-002,
National Transportation Center at Morgan State University, 2002.
(forthcoming).

86