Embed Size (px)
Citation preview
Análisis numérico de uniones abulonadas en materiales compuestos
Cristhian David Rodríguez Flores
Tesis de Maestría en Ciencias de la Ingeniería – Mención Aeroespacial Universidad Nacional de Córdoba – Instituto Universitario Aeronáutico
Director: Dr. Ing. Walter B. Castelló Co Director: MSc. Ing. Julio C. Massa
Noviembre de 2014

i
ANÁLISIS NUMÉRICO DE UNIONES ABULONADAS EN MATERIALES COMPUESTOS
Resumen. La combinación de bajo peso y alta resistencia que brindan los materiales compuestos, los posiciona convenientemente en aplicaciones estructurales exigentes, sin embargo es conocido que la vinculación o unión entre elementos estructurales fabricados en compuestos es un punto crítico. En este trabajo se desarrolla un modelo numérico para estudiar una unión abulonada de solape simple de dos placas de material compuesto. El análisis del problema se hace empleando un código de elementos finitos y el modelo desarrollado contempla el múltiple contacto entre las placas de compuesto, el cuerpo del bulón, la tuerca y las arandelas. Las placas se consideran fabricadas con varias capas de fibra de carbono unidireccional en una matriz de epoxi, las arandelas son de acero, mientras que el bulón y la tuerca son de titanio. Los resultados de este análisis computacional concuerdan muy bien con los obtenidos experimentalmente por otros autores, no solo en cuanto a nivel tensional sino también en las deformaciones y las distorsiones mostradas por las placas. A partir de los resultados satisfactorios obtenidos con el modelo de un solo bulón, se extendió el estudio a la simulación numérica del comportamiento de otras configuraciones de abulonado cuyos resultados muestran buena concordancia con datos obtenidos experimentalmente por otros autores en situaciones similares.
NUMERICAL ANALYSIS OF COMPOSITES BOLTED JOINTS Abstract. It is well known that combination of low weight and high strength of composite materials is a great advantage while designing demanding structural applications; however it is also well known that connections between structural elements made of composite are a critical issue. In this thesis a numerical model is developed to study a single lap bolted union of two composite plates. The problem is addressed using a commercial finite element code and developing a model that takes into account multiple contacts between the plates of composite, the body of the bolt, the nut and the washers. The plates contain several layers of unidirectional carbon fiber in an epoxy matrix considered as sub-laminates; the washers are made of steel, while the bolt and nut are constructed of titanium. The results of the computational analysis agree very well with those obtained experimentally by other authors, not only in terms of stress level but also on the defor-mations and distortions shown by the plates. Based on the satisfactory results obtained with the model of a single bolt, the work continued with numerical simulations of the behavior of other configurations of bolted unions. The results of the simulation in those cases also showed very good agreement with experimental data obtained by other authors for similar situations.

ii

iii
A Xime por estar siempre ahí, con su apoyo, amor y comprensión en los días tristes y alegres, soleados y lluviosos
A Fabiola, mi madre por su amor, apoyo y confianza permanente,
rompiendo la barrera de la distancia
A Reinaldo, mi padre, y a Gaby, María y Raquel, mis hermanas, por su amor y su fe

iv
v
Agradecimientos Cuando inicié esta etapa, lejos de mi patria y de mi familia, un país generoso, grande
y amable me acogió; con gente solidaria, confiable y cariñosa que supo tenderme una mano cuando lo necesité: Argentina, gracias, te llevo atesorada en mi corazón.
Al regresar a los libros luego de casi una década, es inevitable encontrarse con que la ciencia ha avanzado de modo que estás perdido en algún punto de ese avance. Es entonces cuando se necesita la guía de quienes han seguido ese avance y han hecho de su vida una religión de servicio a la formación de los jóvenes, capitalizando en su forma de ser, paciencia, sabiduría y demás virtudes que los caracterizan como verdaderos maestros. Mi admiración y gratitud para los que fueron los guías en esta hermosa etapa de nuevo aprendizaje: José Inaudi, Gustavo Scarpin, Walkiria Schultz, Patricia Silvetti, Andrea Costa, Mario D’errico, Gustavo Wolfman y Eduardo Zapico. Una especial mención merecen dos excelentes maestros: Carlos Sacco y Sergio Elaskar, siempre con una palabra de aliento en el camino, gracias por estar prestos a brindarme su ayuda y apoyo incondicional más allá de lo académico.
Gracias también a mis compañeros de clase: Luis Soria, Carlos Contreras, Andrés Cimino, Dino Antonelli, Mario Rabale, José Alé, Marco Gómez y a todos los que compartieron este interesante camino, que el éxito los cobije siempre. A mis amigos presentes: Juan Carlos, Angelita, Ivanna, Pablo, Jeremías, Josué, Verónica, Enrique, Jorge, Luis L., Andrés, Luis Germán, Gaby, Paola, Andrea C., Fernanda, Liz, Carlita y la pequeña Rocío, gracias por su apoyo. A Doña. Marina, mi gratitud y mi cariño por su forma de ser, su preocupación, solidaridad y por hacerme sentir parte de su familia, compartiendo hermosos momentos. A mis amigos de siempre: Fredy, Paúl, Edward y Fátima gracias por su aliento permanente desde el lugar donde se encuentren.
A Marco, Raúl, Ramiro, Raquel Alicia, Carlota, Silvia, Marco Jr., Tania, Rodrigo, Susy, Sophia, y a todos quienes conforman mi familia, su apoyo siempre ha sido, es y será importante.
A mi padre Reinaldo, a Gaby, María y Raquel mis hermanas, gracias por su cariño, confianza y preocupación que impulsan siempre mi caminar. A mi madre, todo mi amor, por todos los sacrificios hechos, porque siempre ha confiado en mí, incluso cuando yo mismo me he perdido la fe.
A Xime, todo el amor del mundo, por estar conmigo siempre, por darme su amor, comprensión, ternura, apoyo incondicional y poner su hombro para sacar adelante este proyecto y nuestro hogar.
A mis directores, Walter Castelló y Julio Massa, mi gratitud eterna y mi admiración por llevar adelante el reto de dirigir este trabajo, superando las barreras físicas de la distancia, por su disposición a contestar mis inquietudes y enfrentar los altibajos de este proyecto, por buscar soluciones para salir de los problemas y por sacarme adelante.
Finalmente, mi gratitud a mi Ecuador y la Fuerza Aérea Ecuatoriana por creer en mí, a la Fuerza Aérea Argentina, la UNC y el IUA por su apoyo y prestancia. Gracias finalmente a mis compañeros de trabajo Galo Álvarez, José Salcedo, Raúl Banderas, Hernán Salazar y a todos quienes confiaron en que era posible salir adelante con este proyecto y que hoy por la fragilidad de la memoria no constan en estos párrafos.
Cristhian Rodríguez
vi
vii
INDICE
Página
Capítulo 1: INTRODUCCIÓN
1.1 Motivación............................................................................................................................. 1
1.2 Justificación del proyecto...................................................................................................... 3
1.3 Objetivos................................................................................................................................ 4
1.4 Alcance del proyecto............................................................................................................. 4
1.5 Metodología de análisis......................................................................................................... 5
1.6 Contenido de la tesis.............................................................................................................. 6
Capítulo 2: MECÁNICA DE MATERIALES COMPUESTOS
2.1 Introducción............................................................................................................................ 7
2.2 Compuestos laminados........................................................................................................... 7
2.2.1 Secuencia del laminado............................................................................................... 8
2.3 Deformaciones y tensiones en compuestos........................................................................... 9
2.4 Matriz de rigidez de un laminado delgado........................................................................... 13
2.4.1 Matriz de rigidez del laminado usado en la tesis...................................................... 20
Capítulo 3: MODELACIÓN NUMÉRICA DE COMPUESTOS
3.1 Introducción.......................................................................................................................... 23
3.2 Estado actual del análisis numérico de materiales compuestos............................................23
3.3 Análisis por elementos finitos.............................................................................................. 27
3.4 Ecuación de gobierno........................................................................................................... 29
3.5 Selección del elemento finito y de las funciones de forma.................................................. 30
Capítulo 4 ANÁLISIS NUMÉRICO DE UNIONES DE MATERIAL COMPUESTO ABULONADAS
4.1 Introducción.......................................................................................................................... 35
4.2 Descripción del problema..................................................................................................... 36
4.3 Modelo de elementos finitos................................................................................................. 37
4.3.1 Malla de elementos finitos......................................................................................... 37
4.3.2 Tipo de elementos utilizados..................................................................................... 39
4.3.3 Condiciones de borde y de carga............................................................................... 39
4.3.4 Modelo constitutivo del material................................................................................41
viii
4.4 Validación numérica y experimental del modelo propuesto................................................ 42 4.4.1 Deformaciones en la superficie de la placa............................................................... 43 4.4.2 Rigidez y deformaciones de la unión......................................................................... 48 4.4.3 Desplazamiento del plano medio de la placa............................................................. 48 4.4.4 Distribución de tensiones........................................................................................... 50 4.4.5 Deformación de la junta............................................................................................ 53
4.5 Resultados numéricos para uniones abulonadas dobles....................................................... 54
4.5.1 Modelo de dos bulones axiales.................................................................................. 54 4.5.1.1 Geometría de la probeta con dos bulones axiales......................................... 55 4.5.1.2 Deformaciones en la superficie de la placa y rigidez de la unión................. 56 4.5.1.3 Distribución de tensiones en la unión con dos bulones axiales..................... 56 4.5.1.4 Distorsión del plano medio de la placa para dos bulones axiales.................. 58 4.5.1.5 Deformación de la unión con dos bulones axiales.........................................59
4.5.2 Modelo de dos bulones transversales........................................................................ 59 4.5.2.1 Geometría de la probeta con dos bulones transversales................................ 60 4.5.2.2 Deformaciones en la superficie de la placa y rigidez de la unión................. 61 4.5.2.3 Distribución de tensiones en la unión con dos bulones transversales........... 61 4.5.2.4 Distorsión del plano medio de la placa para dos bulones transversales........ 63 4.5.2.5 Deformada final de la unión con dos bulones transversales......................... 64
Capítulo 5: CONCLUSIONES 5.1 Introducción......................................................................................................................... 65
5.2 Conclusiones........................................................................................................................ 66
5.3 Contribuciones del presente trabajo..................................................................................... 67
5.4 Líneas de trabajos futuros.................................................................................................... 68
ANEXO: MATRICES DE RIGIDEZ DE LAMINADOS Y SUBLAMINADOS 1 Introducción........................................................................................................................... 69
2 Matrices de transformación tensión-deformación.................................................................. 69 2.1 Transformación de tensiones.......................................................................................... 70 2.2 Transformación de deformaciones................................................................................. 72
3 Condición de tensión plana.....................................................................................................73
4 Obtención de la matriz de flexibilidad de sublaminados........................................................76 4.1 Elementos de la matriz S debido a tensiones en el plano.................................................. 77 4.2 Elementos de la matriz S debido a las tensiones fuera del plano...................................... 79 4.3 Elementos de S debido a tensiones cortantes fuera del plano........................................ 82 4.4 Conformación de la matriz de rigidez............................................................................ 83
BIBLIOGRAFÍA........................................................................................................................ 85
1
CAPÍTULO 1
1 INTRODUCCIÓN
1.1 Motivación
En las últimas décadas la industria ha generado nuevos materiales, que debido a sus características se adaptan mejor a las nuevas condiciones de trabajo a las que son sometidos. Entre los materiales que han alcanzado un amplio desarrollo en los últimos tiempos se encuentran los materiales compuestos, caracterizados como su nombre lo indica por ser elaborados con dos o más componentes. Habitualmente uno de los componentes cumple la función de reforzar al otro, para lograr una determinada característica deseada como la resistencia mecánica. Entre estos materiales se puede identificar, entre otros, a los compuestos reforzados por fibras.
Reedy [1] define como material compuesto a aquel construido con dos o más componentes que juntos producen propiedades deseables que no pueden alcanzar ninguno de ellos por sí solos. En el presente trabajo, se tratan materiales compuestos por una matriz o base epóxi que recibe un refuerzo de fibras continuas, estas últimas poseedoras de propiedades mecánicas que superan incluso a las de los metales más resistentes. Los materiales de matriz epóxi con refuerzo de fibras, que en el presente trabajo se denominan materiales compuestos o simplemente compuestos, han tenido una amplia difusión en la industria automotriz de avanzada y particularmente en la aeronáutica.
La aplicación de los materiales compuestos en el campo aeronáutico ha ido creciendo a pasos agigantados. Esto se debe esencialmente a la versatilidad de estos materiales, principalmente para proveer características de resistencia óptimas para diversos tipos de aplicaciones. Así mismo, el uso de estos materiales permite una reducción de peso importante, que se logra reemplazando componentes estructurales metálicos de aeronaves por otros de compuesto. Existen varios casos de aviones modernos que explotan las características de los materiales compuestos, entre ellos un caso singular es el Boeing 787 [2] donde un 50 % de su peso corresponde a materiales compuestos.
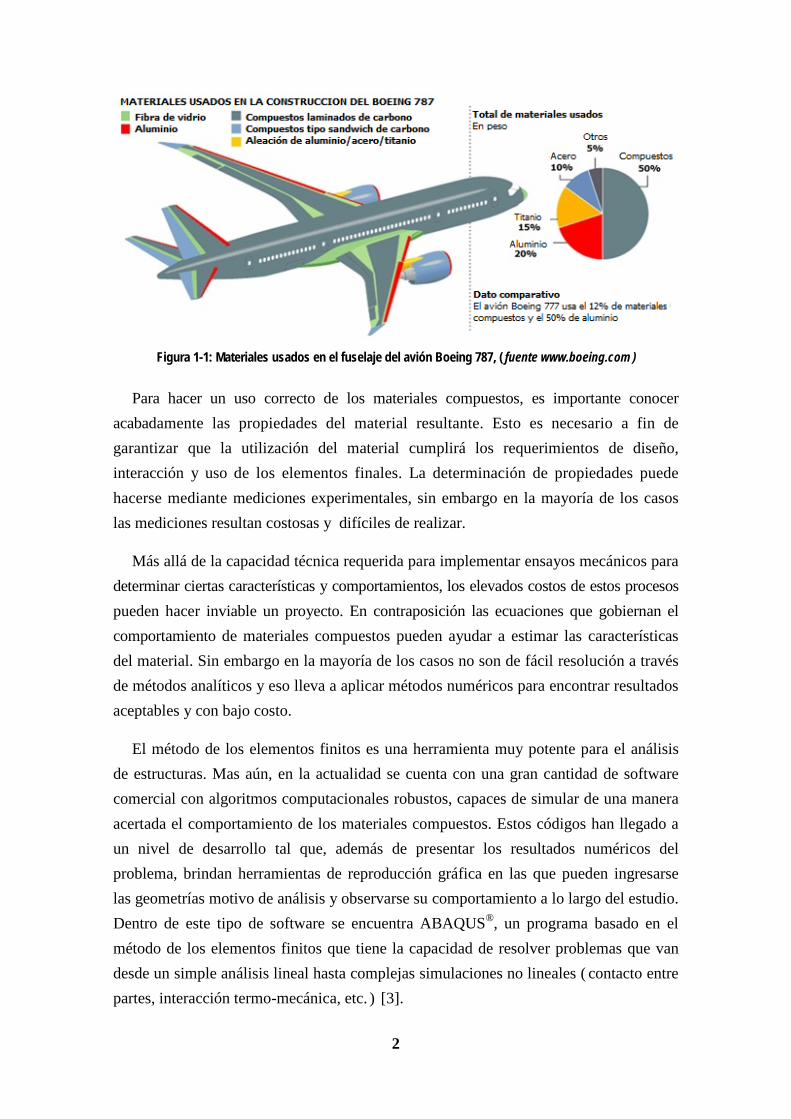
En la Figura 1-1 se muestran los materiales usados en el fuselaje del Boeing 787, su ubicación y su peso dado como porcentaje del peso total. Se observa la participación mayoritaria de los compuestos del orden del 50 %, seguido por aluminio (20 %) , titanio (15 %) y acero (10 %). Para visualizar el progreso en el uso de materiales compuestos basta mencionar que un modelo anterior, el Boeing 777 usa sólo un 12 % de materiales compuestos y 50 % de aluminio.
2
Figura 1-1: Materiales usados en el fuselaje del avión Boeing 787, ( fuente www.boeing.com )
Para hacer un uso correcto de los materiales compuestos, es importante conocer acabadamente las propiedades del material resultante. Esto es necesario a fin de garantizar que la utilización del material cumplirá los requerimientos de diseño, interacción y uso de los elementos finales. La determinación de propiedades puede hacerse mediante mediciones experimentales, sin embargo en la mayoría de los casos las mediciones resultan costosas y difíciles de realizar.
Más allá de la capacidad técnica requerida para implementar ensayos mecánicos para determinar ciertas características y comportamientos, los elevados costos de estos procesos pueden hacer inviable un proyecto. En contraposición las ecuaciones que gobiernan el comportamiento de materiales compuestos pueden ayudar a estimar las características del material. Sin embargo en la mayoría de los casos no son de fácil resolución a través de métodos analíticos y eso lleva a aplicar métodos numéricos para encontrar resultados aceptables y con bajo costo.
El método de los elementos finitos es una herramienta muy potente para el análisis de estructuras. Mas aún, en la actualidad se cuenta con una gran cantidad de software comercial con algoritmos computacionales robustos, capaces de simular de una manera acertada el comportamiento de los materiales compuestos. Estos códigos han llegado a un nivel de desarrollo tal que, además de presentar los resultados numéricos del problema, brindan herramientas de reproducción gráfica en las que pueden ingresarse las geometrías motivo de análisis y observarse su comportamiento a lo largo del estudio. Dentro de este tipo de software se encuentra ABAQUS®, un programa basado en el método de los elementos finitos que tiene la capacidad de resolver problemas que van desde un simple análisis lineal hasta complejas simulaciones no lineales ( contacto entre partes, interacción termo-mecánica, etc. ) [3].
3
En lo que respecta a la simulación computacional de elementos estructurales fabricados en compuesto, a principios de la década pasada se inició el proyecto BOJCAS (Bolted Joints in Composite Aircraft Structures) [4]. En ese esfuerzo se reunieron: tres empresas constructoras de aeronaves, cuatro laboratorios aeroespaciales, dos universidades y dos compañías de investigación; de ocho países europeos.
El objetivo del proyecto BOJCAS fue analizar las juntas abulonadas de materiales compuestos, muy utilizadas en la construcción de estructuras aeronáuticas modernas. Entre otras configuraciones de unión, se analizaron placas de fibra de carbono unidas mediante una solapa simple y con un solo bulón. Este esquema de unión fue sometido a ensayos de tracción de manera experimental, y posteriormente estos ensayos fueron replicados de manera numérica por McCarthy y otros [5].
En este trabajo de tesis se busca reproducir a nivel computacional, mediante el uso del software comercial de análisis por elementos finitos ABAQUS®, una unión abulonada de solapa simple de dos placas de fibra de carbono. Particularmente se pretende estudiar el mismo esquema propuesto en el proyecto BOJCAS [4] y [5], debido a que los resultados experimentales disponibles permiten validar la simulación computacional. Luego, una vez replicados los resultados de BOJCAS, se busca extender el modelo numérico al estudio de otras configuraciones de abulonado para estudiar el comportamiento de las mismas.
1.2 Justificación del proyecto
El desarrollo de simulaciones computacionales del comportamiento de uniones de partes construidas con materiales compuestos, representa un importante aporte para ampliar el campo de aplicación de estos materiales en la construcción de elementos estructurales en todas las ramas de la ingeniería. Es de amplio conocimiento que los materiales compuestos muestran un excelente comportamiento mecánico, con la excepción de las zonas donde no existe continuidad de fibras como por ejemplo agujeros y bordes de unión.
Por ese motivo el desarrollo y validación de un modelo numérico, que sea capaz de brindar resultados satisfactorios en la solución de ese tipo de problemas, resulta crucial en el estudio de estructuras construidas con material compuesto.
Por otra parte la metodología numérica de análisis se presenta como una importante herramienta de apoyo para complementar los estudios experimentales de uniones de piezas construidas con compuestos. La simulación computacional abre un camino al desarrollo de nuevos experimentos ( numéricos ) , disminuyendo los costos de análisis experimental de piezas, esquemas de vinculación, tipo de unión, etc. Dicho esto, queda justificada la conveniencia de explorar alternativas para simular por la vía de elementos finitos el problema de las uniones abulonadas de piezas construidas con materiales compuestos.
4
1.3 Objetivos
El presente trabajo de tesis tiene como objetivo general, reproducir a nivel computa-cional los ensayos experimentales de uniones de placas laminadas en material compuesto que fueron desarrollados dentro del proyecto BOJCAS. Para cumplir este objetivo se ha empleado el software comercial de análisis por elementos finitos ABAQUS®.
Después de validar el modelo de unión simple, el siguiente objetivo es desarrollar y estudiar otras configuraciones de abulonado a fin de analizar el comporta-miento de las mismas (deformaciones, tensiones y modos de falla) .
Para alcanzar los objetivos generales enunciados en el párrafo anterior se plantean los siguientes objetivos específicos:
• Estudiar las características del programa de elementos finitos ABAQUS® con la finalidad de familiarizarse con su uso.
• Analizar el trabajo desarrollado por los participantes del proyecto BOJCAS [4], en lo que refiere a la junta abulonada de solapa simple con un bulón.
• Definir un modelo numérico apropiado para replicar el comportamiento del abulonado de solapa simple de material compuesto.
• Validar el modelo comparando los resultados numéricos del presente trabajo con sus similares experimentales y numéricos del proyecto BOJCAS [4] y del trabajo de McCarthy [5].
• Sobre la base de los resultados obtenidos y usando las características del modelo validado, desarrollar mediante el mismo software modelos para otras configuraciones de abulonado con el fin de anticipar los resultados que se obtendrían al realizar un ensayo de tracción sobre los mismos.
1.4 Alcance del proyecto En este trabajo se ha considerado que los elementos constituyentes del material
compuesto tienen un comportamiento lineal, de este modo se puede inferir la zona de falla del material pero no se ha incluido ningún modelo de daño. Por otro lado se ha estudiado la interacción entre las placas de compuesto y también la interacción entre las placas y el bulón. Para ello fue necesario considerar los contactos entre las diferentes partes involucradas en la unión. El modelo empleado tiene en cuenta la fricción en las zonas de contacto entre las partes, como así también el ajuste previo debido al torque aplicado sobre el bulón.
5
1.5 Metodología de análisis
Con el fin de alcanzar los objetivos planteados para este trabajo, se sigue la siguiente
metodología:
1. Se analiza el proceso experimental llevado a cabo en el Proyecto BOJCAS [4] y los
trabajos realizados por McCarthy [5], para conocer en detalle: i) los criterios utilizados,
ii) los ensayos experimentales de tracción realizados y iii) las simulaciones numéricas
llevadas a cabo para estudiar el comportamiento de las uniones de placas de material
compuesto por medio del abulonado.
2. Se estudia la mecánica de los materiales compuestos, haciendo énfasis en las relaciones
tensión-deformación, las diferentes características de simetría de propiedades que se
puede lograr a partir de la combinación fibra-matriz epóxi y otros temas de interés
para el trabajo. Luego se identifica la característica que mejor se adapta al material,
experimentando con el fin de seleccionar un modelo matemático satisfactorio que lo
represente numéricamente.
3. Se utiliza el software ABAQUS® para el análisis numérico, validando un modelo que
resulta adecuado para simular los ensayos experimentales, con materiales, tipos de
elementos finitos y mallados que representan de forma adecuada las características
del experimento y de las componentes estructurales que motivan el análisis.
4. Se comparan los resultados numéricos, obtenidos en el presente trabajo para uniones
de solapa simple y con un solo bulón, con los datos experimentales reportados en el
Proyecto BOJCAS y los valores numéricos publicados en el trabajo de McCarthy
5. Se analizan otras configuraciones de abulonado con dos bulones para determinar el
comportamiento que se observaría al realizar un ensayo sobre las mismas.
6. Se utiliza el trabajo experimental desarrollado por Morales y Quadri [6] en la
Universidad Nacional de Córdoba para determinar coincidencias que permitan
reforzar la validez del modelo que busca predecir el comportamiento de otras
configuraciones diferentes a la analizada por McCarthy.
6
1.6 Contenido de la tesis
El contenido del presente trabajo se detalla a continuación. En el Capítulo 2, se expone la mecánica de los materiales compuestos, haciendo hincapié en las principales relaciones entre las tensiones, los desplazamientos y las deformaciones, y se formula la matriz de rigidez de un material laminado.
En el Capítulo 3, se expone la mecánica de los materiales compuestos, abarcando las características que mejor se ajustan a las necesidades del presente trabajo, así como la teoría de los laminados. Eso facilita después conocer e identificar los tipos de compor-tamiento que se han presentado durante el análisis experimental, y permite plantear posteriormente las ecuaciones matemáticas que los representan.
En el Capítulo 4 se desarrolla el modelo numérico computacional presentado en esta tesis, el cual permite reproducir las condiciones bajo las cuales se llevaron a cabo las experimentaciones del proyecto BOJCAS y los trabajos numéricos de McCarthy. En este capítulo se describe el modelo desarrollado para replicar los resultados experimentales, se valida el modelo, y se desarrollan modelos similares para otras configuraciones de abulonado que permiten anticipar el comportamiento que se observaría al experimentar sobre las mismas.
En el Capítulo 5 se exponen las conclusiones y recomendaciones derivadas del presente trabajo. Se enuncian las contribuciones de esta tesis al ámbito académico y se listan posibles líneas de trabajo futuras que se pueden derivar de la misma.
En el Anexo se detalla la metodología para obtener las matrices de rigidez de laminados cuyas capas tienen diferentes orientaciones, así como también para el caso de sub-laminados.
7
CAPÍTULO 2
2 MECÁNICA DE MATERIALES COMPUESTOS
2.1 Introducción
Los compuestos laminados, de acuerdo a Paris y colab. [7], son considerados desde el punto de vista macroscópico como la combinación de dos o más materiales con interfaces de separación entre ellos. El material así obtenido muestra habitualmente propiedades mecánicas que no pueden ser alcanzadas por sus constituyentes actuando en forma aislada.
Dado que los materiales compuestos presentan como ventaja elevadas relaciones resistencia-peso y rigidez-peso, resultan adecuados para ser utilizados en estructuras en las cuales el peso es una variable fundamental en el proceso de diseño. Sus aplicaciones, principalmente en la industria aeronáutica, han sido notorias debido a esas características, aunque también se observa un crecimiento de su campo de aplicación en otras ramas de la industria como lo afirman Car y colab. [8]
En este capítulo se cubre la mecánica de los compuestos laminados. Se definen las relaciones aplicables a un laminado sometido a cargas, en lo que refiere a los campos de desplazamientos, deformaciones y tensiones; como así también las relaciones entre ellos. Se han introducido además las relaciones asociadas al estado de tensión plana, que es el más generalizado para el análisis de compuestos. Por último a partir de las relaciones mencionadas, se obtienen las matrices de rigidez de las capas y la matriz de rigidez global del laminado.
2.2 Compuestos laminados
Habitualmente los materiales compuestos de fibra continua están constituidos por capas de material, pegadas entre si de modo que forman un laminado. Las capas que conforman este tipo de compuestos, pueden estar constituidas de fibras largas, continuas unidireccionales, tejidos multidireccionales ó de otro tipo; embebidas en una matriz inicialmente líquida para facilitar la cohesión. Esta matriz luego de su curado a temperatura ambiente, ó mediante tratamiento térmico, se endurece dando el soporte necesario a las fibras del material laminado.
8
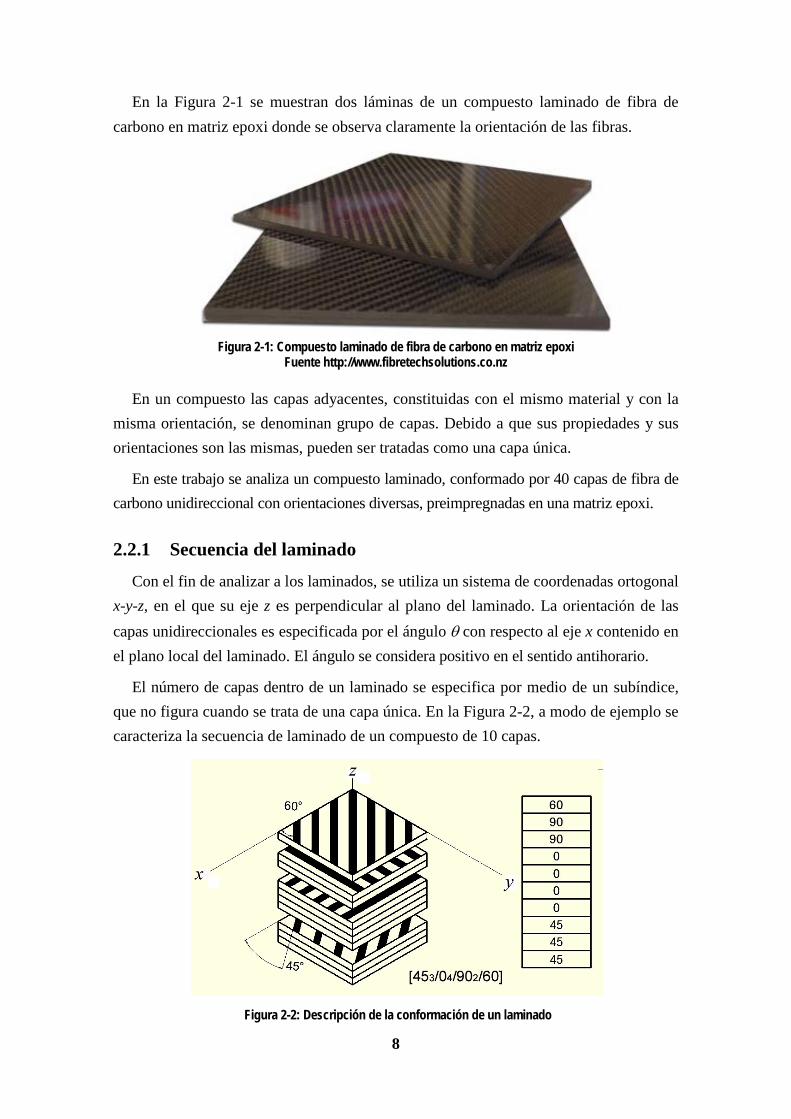
En la Figura 2-1 se muestran dos láminas de un compuesto laminado de fibra de carbono en matriz epoxi donde se observa claramente la orientación de las fibras.
Figura 2-1: Compuesto laminado de fibra de carbono en matriz epoxi
Fuente http://www.fibretechsolutions.co.nz
En un compuesto las capas adyacentes, constituidas con el mismo material y con la misma orientación, se denominan grupo de capas. Debido a que sus propiedades y sus orientaciones son las mismas, pueden ser tratadas como una capa única.
En este trabajo se analiza un compuesto laminado, conformado por 40 capas de fibra de carbono unidireccional con orientaciones diversas, preimpregnadas en una matriz epoxi.
2.2.1 Secuencia del laminado
Con el fin de analizar a los laminados, se utiliza un sistema de coordenadas ortogonal x-y-z, en el que su eje z es perpendicular al plano del laminado. La orientación de las capas unidireccionales es especificada por el ángulo θ con respecto al eje x contenido en el plano local del laminado. El ángulo se considera positivo en el sentido antihorario.
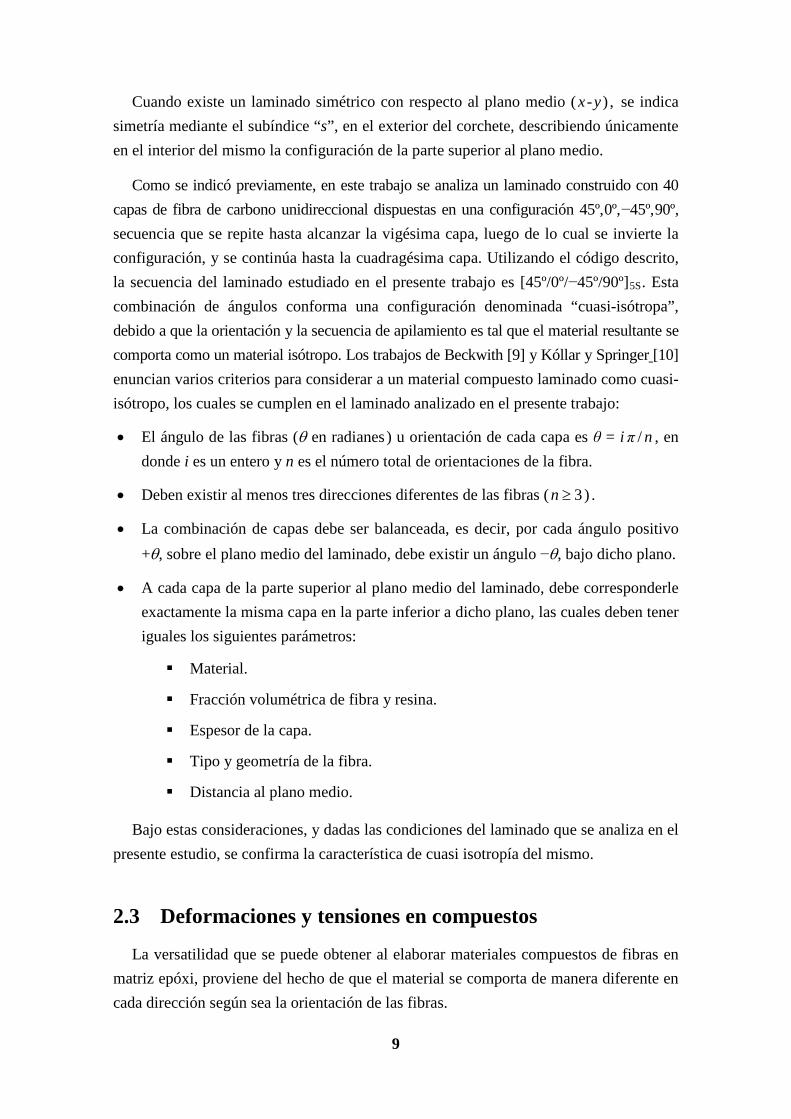
El número de capas dentro de un laminado se especifica por medio de un subíndice, que no figura cuando se trata de una capa única. En la Figura 2-2, a modo de ejemplo se caracteriza la secuencia de laminado de un compuesto de 10 capas.
Figura 2-2: Descripción de la conformación de un laminado
9
Cuando existe un laminado simétrico con respecto al plano medio ( x-y ) , se indica simetría mediante el subíndice “s”, en el exterior del corchete, describiendo únicamente en el interior del mismo la configuración de la parte superior al plano medio.
Como se indicó previamente, en este trabajo se analiza un laminado construido con 40 capas de fibra de carbono unidireccional dispuestas en una configuración 45º,0º,−45º,90º, secuencia que se repite hasta alcanzar la vigésima capa, luego de lo cual se invierte la configuración, y se continúa hasta la cuadragésima capa. Utilizando el código descrito, la secuencia del laminado estudiado en el presente trabajo es [45º/0º/−45º/90º]5S. Esta combinación de ángulos conforma una configuración denominada “cuasi-isótropa”, debido a que la orientación y la secuencia de apilamiento es tal que el material resultante se comporta como un material isótropo. Los trabajos de Beckwith [9] y Kóllar y Springer [10] enuncian varios criterios para considerar a un material compuesto laminado como cuasi-isótropo, los cuales se cumplen en el laminado analizado en el presente trabajo:
• El ángulo de las fibras (θ en radianes) u orientación de cada capa es θ = i π / n , en donde i es un entero y n es el número total de orientaciones de la fibra.
• Deben existir al menos tres direcciones diferentes de las fibras (n ≥ 3) .
• La combinación de capas debe ser balanceada, es decir, por cada ángulo positivo +θ, sobre el plano medio del laminado, debe existir un ángulo −θ, bajo dicho plano.
• A cada capa de la parte superior al plano medio del laminado, debe corresponderle exactamente la misma capa en la parte inferior a dicho plano, las cuales deben tener iguales los siguientes parámetros:
Material.
Fracción volumétrica de fibra y resina.
Espesor de la capa.
Tipo y geometría de la fibra.
Distancia al plano medio.
Bajo estas consideraciones, y dadas las condiciones del laminado que se analiza en el presente estudio, se confirma la característica de cuasi isotropía del mismo.
2.3 Deformaciones y tensiones en compuestos
La versatilidad que se puede obtener al elaborar materiales compuestos de fibras en matriz epóxi, proviene del hecho de que el material se comporta de manera diferente en cada dirección según sea la orientación de las fibras.

10
Las deformaciones ε están definidas a partir del cambio en los desplazamientos u. De esta manera teniendo en cuenta pequeñas deformaciones, las componentes del tensor de deformaciones se pueden obtener a partir de la siguiente relación:
/ 0 00 / 00 0 /0 / // 0 // / 0
x
y
z
yz
xz
xy
xy uz vz y wz x
y x
εεεγγγ
∂ ∂ ∂ ∂ ∂ ∂ = = = → = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
u uε ε∂ ∂ (1)
Luego la relación constitutiva entre las tensiones y las deformaciones para un material anisótropo y linealmente elástico, en un sistema coordenado x-y-z, puede evaluarse a partir de la expresión:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55
x x y z yz xz xy
y x y z yz xz xy
z x y yzz xz xy
yz x y z yz xz xy
xz x y z yz xz
C C C C C C
C C C C C C
C C C C C C
C C C C C C
C C C C C
σ ε ε ε
σ ε ε ε
σ ε ε ε
τ ε ε ε
τ ε
γ γ γ
γ γ γ
ε
γ γ γ
γ γ γ
γ γε
= + + + + +
= + + + + +
= + + + + +
= + + + + +
= + + + + 56
61 62 63 64 65 66
xy
xy x y z yz xz xy
C
C C C C C Cτ ε ε ε
γ
γ γ γ
+
= + + + + +
(2)
donde las ijC son constantes que definen al material. La relación general (2) puede ser expresada matricialmente como:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
=
x x
y y
z z
yz yz
xz xz
xy xy
C C C C C CC C C C C CC C C C C CC C C C C CC C C C C CC C C C C C
εεεγγγ
σσστττ
→ =
Cσ ε (3)
donde la matriz C es la matriz de rigidez en el sistema coordenado x-y-z. Al invertir la relación expresada previamente, obtenemos la siguiente:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
σσσ
γ
εεε
ττ
γγ
τ
=
x x
y y
z z
yz yz
xz xz
xy xy
S S S S S SS S S S S SS S S S S SS S S S S SS S S S S SS S S S S S
→ =
Sε σ (4)

11
En la ecuación (4), S es la matriz de flexibilidad del material, la cual resulta ser la inversa de la matriz C. Para el caso de un material elástico se cumple que tanto la matriz de flexibilidad como la de rigidez son simétricas con lo que únicamente 21 de los 36 elementos que las componen son independientes.
En el caso de láminas, se observa que las tensiones en dirección transversal al plano de la lámina de material compuesto , yz yz xzσ τ τ se consideran nulas. Esto conlleva a un estado de tensión plana, donde (4) se transforma en:
11 12 16 13 23 36
12 22 26 14 24 46
16 26 36 15 25 56
ε εε γγ
σ σσ στ τγ
= =
x x z x
y y yz y
xy xy xz xy
S S S S S SS S S S S SS S S S S S
(5)
A partir de las relaciones planteadas, y bajo consideraciones atribuibles a los arreglos de las fibras, los compuestos pueden caracterizarse en general como anisótropos cuando no hay planos de simetría respecto al alineamiento de las fibras. Los compuestos monoclínicos son aquellos donde hay un plano de simetría respecto al alineamiento de las fibras. El caso más habitual es el de los compuestos ortótropos donde hay tres planos de simetría mutuamente perpendiculares respecto al alineamiento de las fibras. Los transversalmente isótropos tienen las mismas características del ortótropo pero uno de sus planos de simetría puede tratarse como isótropo. Finalmente para el caso de los metales se pueden tratar como materiales isótropos dado que todos los planos son planos de simetría.
Las diferentes características que presentan los compuestos hacen que se modifique la matriz de flexibilidad para adaptarse a esas particularidades. Para el caso de un material ortótropo con planos de simetría x-y, x-z y y-z, donde xσ que está en el plano de simetría x-y que no provoca deformaciones cortantes fuera del plano ( 0xz yzγ γ= = ), la tensión de corte xyτ también es nula debido a que xσ también está en el plano de simetría x-z con lo que los elementos S14, S15 y S16 son nulos. Con argumentos similares, se puede demostrar que para un material ortótropo los elementos S24, S25, S26,
S34, S35, S36, S45, S46, y S56 también son nulos. De este modo la relación deformación-tensión (4) queda establecida por:
11 12 13
22 23
33
44
55
66
0 0 0 0 0 0 0 0 0
0 0 0
S S SS S
SS
sim SS
=
S (6)
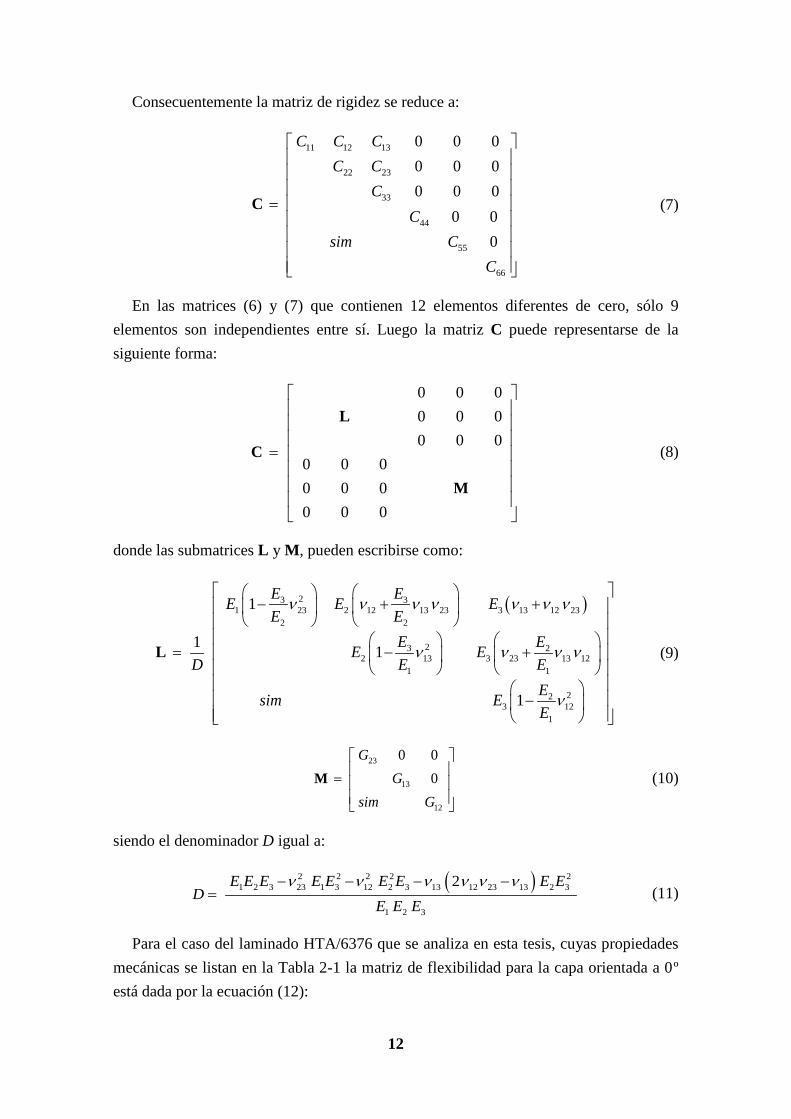
12
Consecuentemente la matriz de rigidez se reduce a:
11 12 13
22 23
33
44
55
66
0 0 0 0 0 0 0 0 0
0 0 0
C C CC C
CC
sim CC
=
C (7)
En las matrices (6) y (7) que contienen 12 elementos diferentes de cero, sólo 9 elementos son independientes entre sí. Luego la matriz C puede representarse de la siguiente forma:
0 0 00 0 00 0 0
0 0 00 0 00 0 0
=
L
C
M
(8)
donde las submatrices L y M, pueden escribirse como:
( )23 31 23 2 12 13 23 3 13 12 23
2 2
23 22 13 3 23 13 12
1 1
223 12
1
1
1 1
1
E EE E EE E
E EE ED E E
Esim EE
ν νν ν ν
ν
ν
ν
ν
ν
ν ν
− + +
= − + −
L (9)
23
13
12
0 00
GG
sim G
=
M (10)
siendo el denominador D igual a:
( )2 2 2 2 2
1 2 3 23 1 3 12 2 3 13 12 23 13 2 3
1 2 3
2E E E E E E E E ED
E E Eν ν ν ν ν ν− − − −
= (11)
Para el caso del laminado HTA/6376 que se analiza en esta tesis, cuyas propiedades mecánicas se listan en la Tabla 2-1 la matriz de flexibilidad para la capa orientada a 0º está dada por la ecuación (12):

13
Tabla 2-1: Propiedades de rigidez unidireccional [GPa] para una lámina de carbono/epóxi HTA/6376
E11 E22 E33 G12 G13 G23 ν12 ν13 ν23 140 10 10 5,2 5,2 3,9 0,3 0,3 0,5
2
9
1 0,3 0,3 0 0 0140 140 140
1 0,5 0 0 010 10
1 0 0 010 m 1 01 N0 0
3,91 0
5,21
5,2
sim
−
− − −
=
S x (12)
Invirtiendo la matriz (12) se obtiene la matriz de rigidez para una capa del material compuesto estudiado, la cual es:
2
9
143,7 6,16 6,16 0 0 0
13,60 6,93 0 0 0
13,6 0 0 0 m 1 0N3,9 0 0
5, 2 0
5, 2
sim
=
C x (13)
2.4 Matriz de rigidez de un laminado delgado En este trabajo se aplican los conceptos y desarrollos de Kóllar y Springer [10]. El
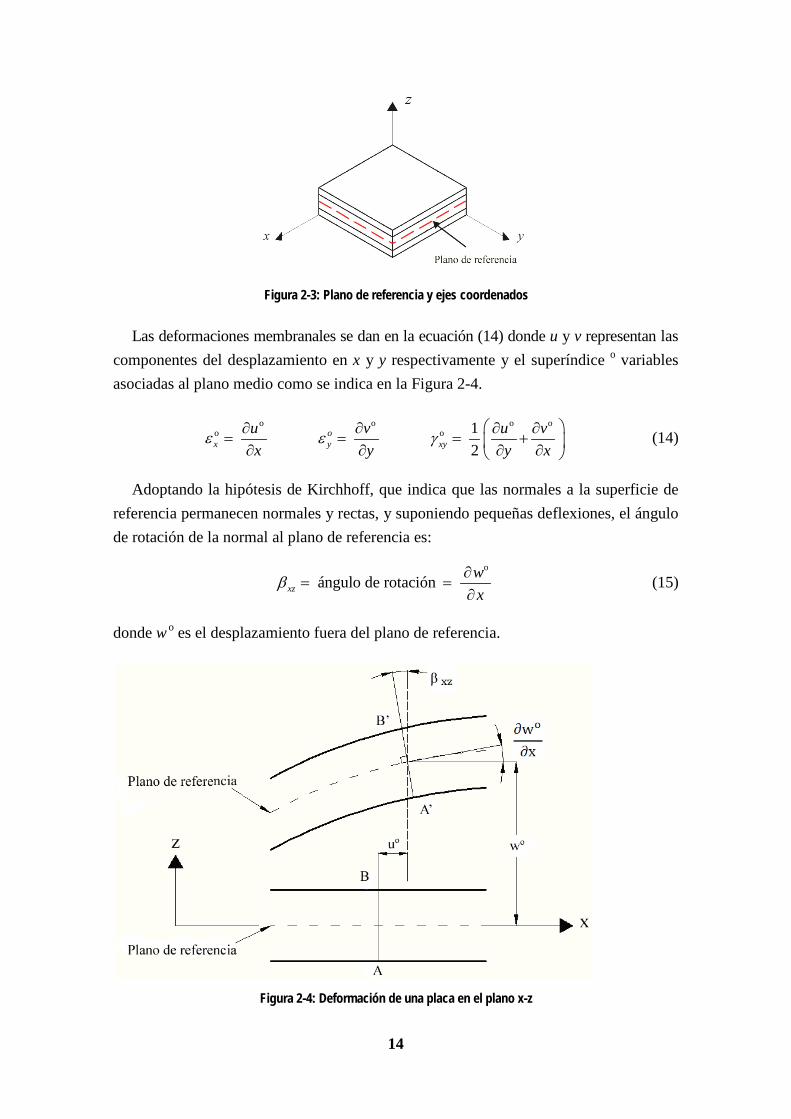
análisis que se presenta está basado en la teoría de placas laminadas asumiendo que los laminados son planos. Por conveniencia, se ubica al laminado en un sistema de coordenadas referencial x-y-z, y se usa un plano de referencia en la mitad del laminado como se muestra en la Figura 2-3.
Se supone que el laminado experimenta pequeñas deformaciones y que las deforma-ciones varían linealmente a través del laminado en la dirección z. De este modo las deformaciones cortantes son despreciables, dado que la tensión fuera del plano (normal σz y las cortantes τxz, τyz) son pequeñas en comparación con las tensiones en el plano: σx, σy y τxy. Estas aproximaciones implican que las relaciones tensión-deformación pueden aplicarse bajo consideraciones de tensión plana.
14
Figura 2-3: Plano de referencia y ejes coordenados
Las deformaciones membranales se dan en la ecuación (14) donde u y v representan las componentes del desplazamiento en x y y respectivamente y el superíndice o variables asociadas al plano medio como se indica en la Figura 2-4.
o o o o
o o 12
ox y xy
u v u vx y y x
ε γε ∂ ∂ ∂ ∂
= = = + ∂ ∂ ∂ ∂ (14)
Adoptando la hipótesis de Kirchhoff, que indica que las normales a la superficie de referencia permanecen normales y rectas, y suponiendo pequeñas deflexiones, el ángulo de rotación de la normal al plano de referencia es:
o
ángulo de rotaciónxzwx
β ∂= =
∂ (15)
donde w o es el desplazamiento fuera del plano de referencia.
Figura 2-4: Deformación de una placa en el plano x-z
15
El desplazamiento total en la dirección x e y está dado por:
oo o
oo o
x z
y z
wu u z u zx
wv v z v zy
β
β =
∂= − = −
∂∂
= − −∂
(16)
Sustituyendo (16) en las definiciones de deformación (14) se obtiene:
o 2 o
2
o 2 o
2
o o 2 o1 12 2
x
y
x y
u u wzx x xv v wzy y y
u v u v wzy x y x x y
ε
ε
γ
∂ ∂ ∂= = −
∂ ∂ ∂∂ ∂ ∂
= = −∂ ∂ ∂
∂ ∂ ∂ ∂ ∂= + = + − ∂ ∂ ∂ ∂ ∂ ∂
(17)
Las derivadas segundas en la ecuación (17) miden las curvaturas del plano de referencia,
2 o 2 o 2 o
2 2x y x yw w wx y x y
κ κ κ∂ ∂ ∂∂ ∂
= =∂ ∂
= (18)
de modo que (17) se puede escribir como:
o
o
o
x x x
y y y
xy xy xy
zε κε
γκεεκγ
= +
(19)
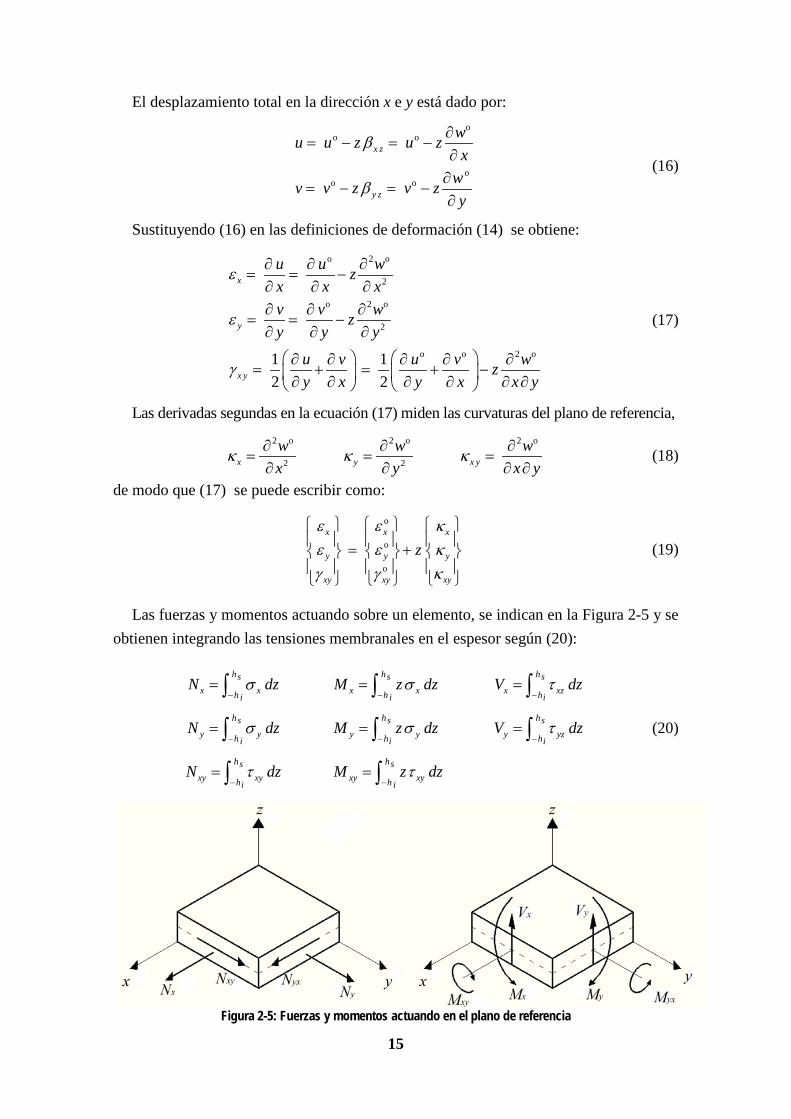
Las fuerzas y momentos actuando sobre un elemento, se indican en la Figura 2-5 y se obtienen integrando las tensiones membranales en el espesor según (20):
h h hs s sx x x x x xzh h hi i i
h h hs s sy y y y y yzh h hi i i
h hs sxy xy xy xyh hi i
N dz M z dz V dz
N dz M z dz V dz
N dz M z dz
σ σ τ
σ σ τ
τ τ
− − −
− − −
− −
= = =
= = =
= =
∫ ∫ ∫
∫ ∫ ∫
∫ ∫
(20)
Figura 2-5: Fuerzas y momentos actuando en el plano de referencia

16
En la ecuación (20) los esfuerzos Ni representan las fuerzas en el plano distribuidas sobre el contorno de la placa, M i son los momentos distribuidos en el contorno, y Vi son las fuerzas cortantes transversales distribuidas en el contorno. Los límites de integración hs y hi, son las distancias desde el plano de referencia a la superficie superior e inferior del laminado, respectivamente. Recordando la relación tensión-deformación para tensión plana (5), y denominando Q a la matriz de rigidez, se tiene:
x x
y y
x y x y
εε
σστ γ
=
Q (21)
En la ecuación (21), Q es la matriz de rigidez de la capa en el sistema coordenado x-y, y la misma está relacionada con la matriz de rigidez Q en un sistema de coordenadas x1-x2-x3 (donde el eje x1 se encuentra alineado con la dirección longitudinal de la fibra ). Mediante la transformación (22), cuya deducción está en el Anexo de esta tesis, se puede establecer que:
11 12 16 11 12 16
22 26 22 26
66 66
Q Q Q Q Q QQ Q Q Q
sim Q sim Q
−
= =
σ1
εQ T T (22)
Las matrices Tσ y Tε son las matrices de transformación, relacionadas con las funciones trigonométricas del ángulo de orientación de las fibras, θ, dadas por:
2 2
2 2
2 2
cos sen 2cos sensen cos 2cos sen
cos sen cos sen cos senσ
θ θ θ θθ θ θ θ
θ θ θ θ θ θ
= − − −
T (23)
2 2
2 2
2 2
cos sen cos sensen cos cos sen
2cos sen 2cos sen cos sen
θ θ θ θθ θ θ θ
θ θ θ θ θ θ
= − − −
εT (24)
Reemplazando (21) en las ecuaciones de fuerzas y momentos (19) se obtiene:
o
o
o
o
o 2
o
x x xh hs s
y y yh hi i
x y x y x y
x x xh hs s
y y yh hi i
x y x y x y
NN d z z d zN
M z d z z dM
Mz
κκκ
κκκ
εεε
εεε
− −
− −
= +
= +
∫ ∫
∫ ∫
Q Q
Q Q
(25)

17
Partiendo de (25) se pueden evaluar las matrices de rigidez del laminado, que se definen entonces como:
2h h hs s s
h h hi i idz z dz z dz
− − −= = =∫ ∫ ∫A Q B Q D Q (26)
siendo los elementos de las submatrices (26) :
2 1, 2, 6h h hs s s
i j i j i j i j i j i jh h hi i iA Q d z B z Q d z D z Q d z i
− − −= = = =∫ ∫ ∫ (27)
Debido a que Q es constante en cada capa, las integrales de las ecuaciones que anteceden pueden reemplazarse por sumatorias:
( ) ( ) ( ) ( ) ( ) ( )2 2 3 31 1 1
1 1 1
1 12 3
m m m
i j i j k k i j i j k k i j i j k kk k kk k k
A Q z z B Q z z D Q z z− − −= = =
= − = − = −∑ ∑ ∑ (28)
en donde m es el número total de capas o grupos de capas en el laminado, zk y zk-1 son las distancias desde el plano de referencia a las dos superficies de la k-ésima capa y ( i jQ )k
son los elementos de la matriz de rigidez de la k-ésima capa.
Con las definiciones (28), las expresiones para las fuerzas y momentos en el plano se convierten en:
o11 12 16 11 12 16
o12 22 26 12 22 26
o16 26 66 16 26 66
11 12 16 11 12 16
12 22 26 12 22 26
16 26 66 16 26 66
x x
y y
xy xy
x x
y y
xy xy
N A A A B B BN A A A B B BN A A A B B B
M B B B D D DM B B B D D DM B B B D D D
κ
ε
κ
γ
κ
ε =
(29)
En la ecuación (29) los vectores a izquierda y derecha representan los esfuerzos y deformaciones generalizadas. Invirtiendo la ecuación (29), se obtienen las deformaciones y curvaturas en términos de las fuerzas y momentos en el plano:
o11 12 16 11 12 16
o12 22 26 12 22 26
o16 26 66 16 26 66
11 12 16 11 12 16
12 22 26 12 22 26
16 26 66 16 26 66
x x
y y
xy xy
xx
yy
xyxy
NNN
MMM
α α α β β βα α α β β βα α α β β β
κ β β β δ δ δκ β β β δ δ δκ
ε
β β β δ δ
εγ
δ
=
(30)
de modo que resulta la relación:

18
11 12 16 11 12 16 11 12 16 11 12 16
12 22 26 12 22 26 12 22 26 12 22 26
16 26 66 16 26 66 16 26 66 16 26 66
11 12 16 11 12 16 11 12 16
12 22 26 12 22 26 12 22 2
16 26 66 16 26 66
A A A B B BA A A B B BA A A B B B
B B BB B B
α α α β β βα α α β β βα α α β β β
β β β δ δ δβ β β δ δ δβ β β δ δ δ
=
11 12 16
6 12 22 26
16 26 66 16 26 66
D D DD D D
B B B D D D
−
1
(31)
Las submatrices A, B y D representan la rigidez del laminado, y permiten obtener la respuesta del mismo a fuerzas y momentos en el plano medio o de referencia:
• Aij es la rigidez en el plano que relaciona las fuerzas N con las deformaciones en el plano ε.
• Dij es la rigidez a la flexión que relaciona los momentos M con las curvaturas κ.
• Bij es la rigidez de acople en el plano y fuera del mismo, que relaciona las fuerzas N con las curvaturas κ y los momentos M con las deformaciones en el plano ε.
La existencia de la matriz B implica el acoplamiento entre la flexión y la elongación, debido a que tanto fuerzas y curvaturas, momentos y deformaciones existen de manera simultánea. En un laminado simétrico como el caso del analizado en este trabajo, la capa ubicada en la posición +z es idéntica a la ubicada en −z, por lo que su matriz de rigidez es la misma, es decir:
( ) ( )−=z zQ Q (32)
Sustituyendo (32) en (26) la matriz B se anula, por lo que para un laminado simétrico no hay acoplamiento flexión-elongación y la ecuación (29) se reduce a:
11 12 16
22 26
66
ox x
oy y
oxy xy
N A A AN A AN sim A
εεγ
=
(33)
11 12 16
22 26
66
x x
y y
xy xy
M D D DM D DM sim D
κκκ
=
(34)
Para este caso, la matriz de flexibilidad se puede expresar como:
11 12 16 11 12 16
22 26 22 26
66 66
A A A a a aA A a a
sim A sim a
− =
1
(35)

19
11 12 16 11 12 16
22 26 22 26
66 66
D D D d d dD D d d
sim D sim d
− =
1
(36)
Con lo que la relación entre las deformaciones y curvaturas con las fuerzas y momentos se puede reescribir como:
o11 12 16
o22 26
o66
x x
y y
xy xy
a a a Na a N
sim a N
εεγ
=
(37)
11 12 16
22 26
66
x x
y y
xy xy
d d d Md d M
sim d M
κκκ
=
(38)
Para el caso de capas ortótropas los elementos 16Q y 26Q en la matriz Q son nulos, con lo cual los valores de los elementos 16 26 16 26, , ,A A D D de las matrices A, B y D también se anulan, y esto resulta en:
o11 12
o12 22
66
00
0 0
x x
y yo
xy xy
N A AN A AN A
εεγ
=
(39)
11 12
12 22
66
00
0 0
x x
y y
xy xy
M D DM D DM D
κκκ
=
(40)
y por lo tanto la relación entre las deformaciones y curvaturas con las fuerzas y momentos termina siendo:
o11 12
o12 22
o66
00
0 0
x x
y y
xy xy
a a Na a N
a N
εεγ
=
(41)
11 12
12 22
66
00
0 0
x x
y y
xy xy
d d Md d M
d M
κκκ
=
(42)

20
2.4.1 Matriz de rigidez del laminado usado en la tesis
Para este análisis, bajo las consideraciones de tensión plana, la matriz de flexibilidad S de una capa orientada a 0º fabricada con el material HTA/6376 es:
2
9
1 0,3 0140 140
1 m0 1 010 N
15,2
x −
− =
sim
S (43)
luego la matriz de rigidez Q para esta capa con orientación 0º, resulta de invertir la matriz de flexibilidad (44), siendo:
0 92
140,91 3,02 0N10,07 0 1 0m
5,20sim
=
=
Q Q x (44)
Aplicando sobre la matriz (44), la transformación de coordenadas prevista en (22), las matrices de rigidez para las capas orientadas a 45º, −45º y 90º resultan:
945 2
44,45 34,05 32,71N44,45 32,71 1 0m
36,23sim
=
Q x (45)
945 2
44,45 34,05 32,71N44,45 32,71 1 0m
36,23sim
−
− = −
Q x (46)
990 2
10,07 3,02 0N140,91 0 1 0m
5,20sim
=
Q x (47)
Basado en (28) y considerando que la matriz B es nula, las matrices A y D para un laminado HTA/6376 con una configuración [45º/0º/−45º/90]5s, resultan:
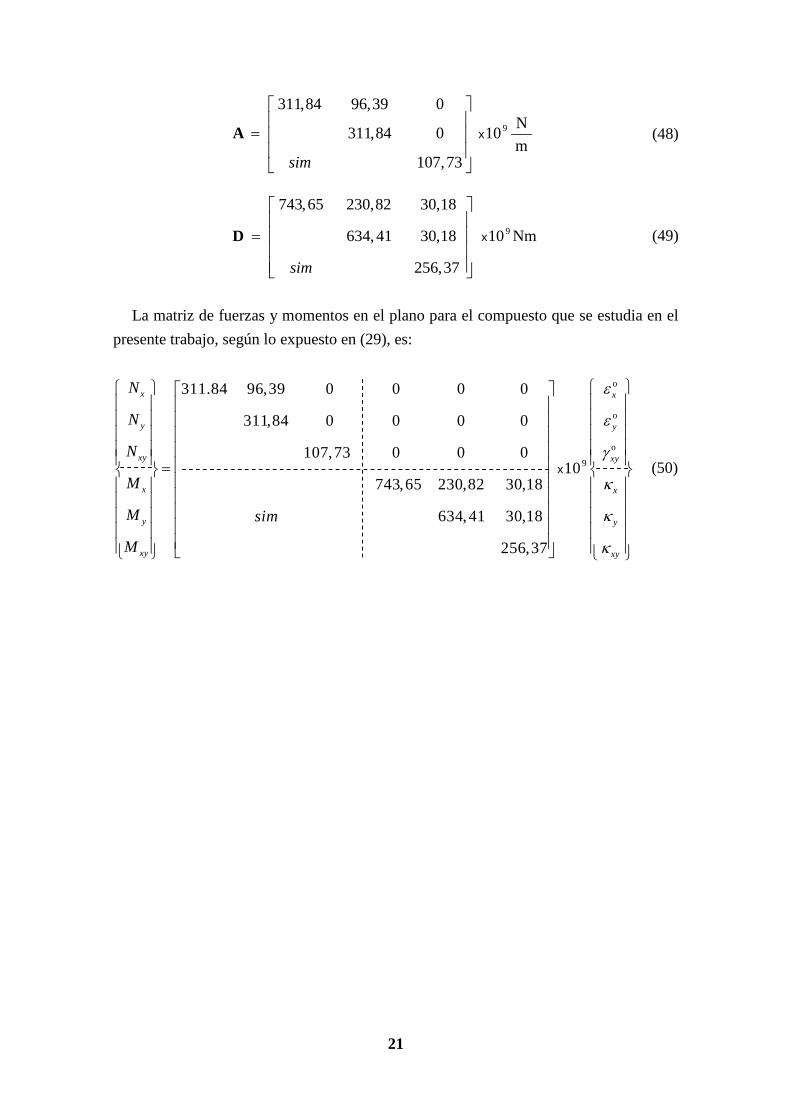
21
9
311,84 96,39 0N311,84 0 10m
107,73sim
=
A x (48)
9
743,65 230,82 30,18
634,41 30,18 10 Nm
256,37sim
=
D x (49)
La matriz de fuerzas y momentos en el plano para el compuesto que se estudia en el presente trabajo, según lo expuesto en (29), es:
o
o
o
9
311.84 96,39 0 0 0 0
311,84 0 0 0 0
107,73 0 0 010
743,65 230,82 30,18
634,41 30,18
256,37
x x
y y
xy xy
x x
y y
xy xy
N
N
N
M
simM
M
ε
ε
κ
κ
γ
κ
=
x (50)
22
23
CAPÍTULO 3
3 MODELACIÓN NUMÉRICA DE COMPUESTOS
3.1 Introducción
El método de elementos finitos es una técnica poderosa para la solución de ecuaciones diferenciales e integrales que gobiernan una gran variedad de problemas de ingeniería y ciencias aplicadas. Actualmente existe una gran cantidad de software comercial con capacidad de resolución de diferentes problemas de ingeniería a través del método de elementos finitos.
En este capítulo se describe el estado del arte del análisis de materiales compuestos aplicando métodos numéricos. Se exponen las teorías que han propuesto algunos autores para analizar este tipo de materiales, en particular la de Reedy [1]. También se describe el procedimiento general para tratar numéricamente las ecuaciones de gobierno, la ecuación constitutiva adoptada, y el tipo de elemento finito utilizado. Se define la aproximación empleada, sus funciones de forma y el desarrollo de las matrices típicas que permiten el análisis por elementos finitos.
3.2 Estado actual del análisis numérico de materiales compuestos
Zienkiewicz y colab. [11] afirman que las técnicas numéricas, fundamentalmente el método de elementos finitos, facilitan el análisis de estructuras elaboradas con materiales compuestos. Car y colab. [7] clasifican a las teorías más utilizadas en el ámbito del método de elementos finitos para el análisis de materiales compuestos, de la siguiente manera:
1. Teoría de capa única equivalente.
2. Teoría de elemento sólido bi y tridimensional.
3. Teoría de aproximación bidimensional por capas.
Entre los primeros trabajos que se ocuparon de desarrollar un análisis tridimensional de compuestos laminados por el método de los elementos finitos está el de Barker y colab. [12]. Estos investigadores llegaron a la conclusión de que es necesario contar con elementos individuales en cada capa del compuesto cuando se tienen diferentes orientaciones de las fibras.
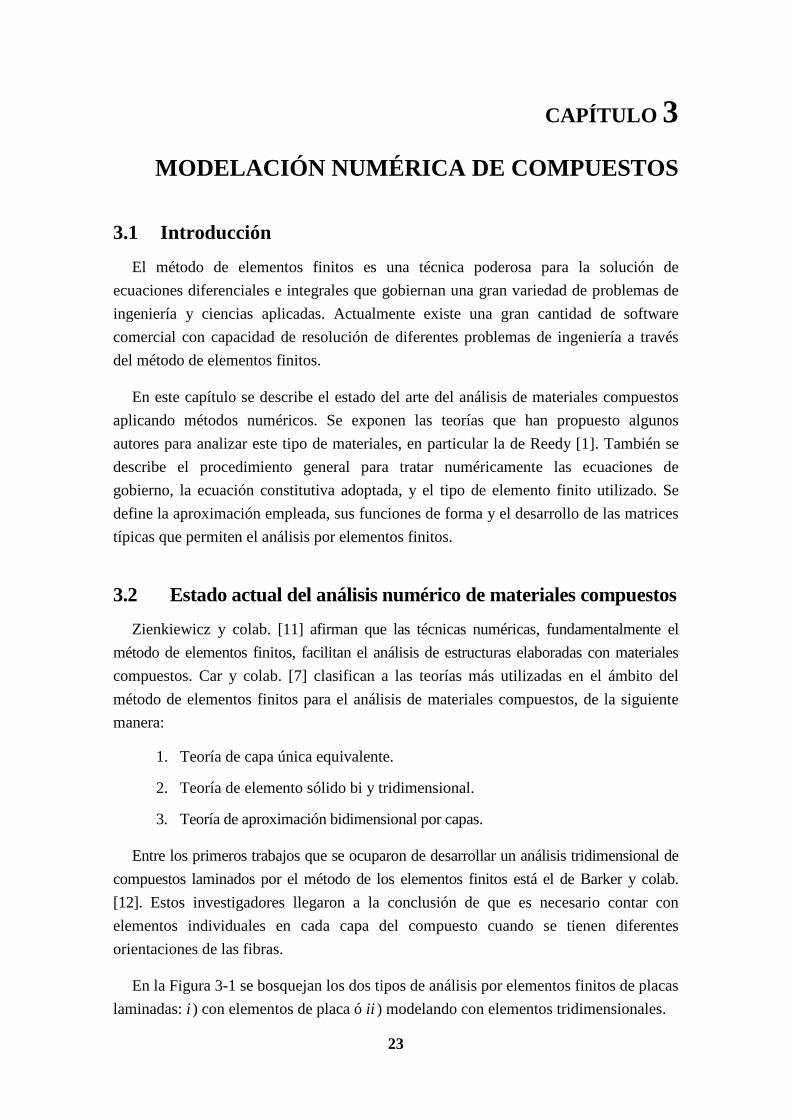
En la Figura 3-1 se bosquejan los dos tipos de análisis por elementos finitos de placas laminadas: i ) con elementos de placa ó ii ) modelando con elementos tridimensionales.
24
Figura 3-1: Placa de material compuesto
( a ) Análisis como placa. ( b ) Análisis con elementos tridimensionales
En el estado actual del desarrollo de los materiales compuestos, es práctica habitual utilizar una gran cantidad de capas, pero de un espesor relativamente reducido. Bajo las consideraciones expresadas por Barker y colab. [12], una formulación de elementos finitos que cumpla con esas consideraciones requeriría un número considerable de elementos tridimensionales, lo cual conllevaría un costo computacional elevado en el análisis de estructuras de grandes dimensiones.
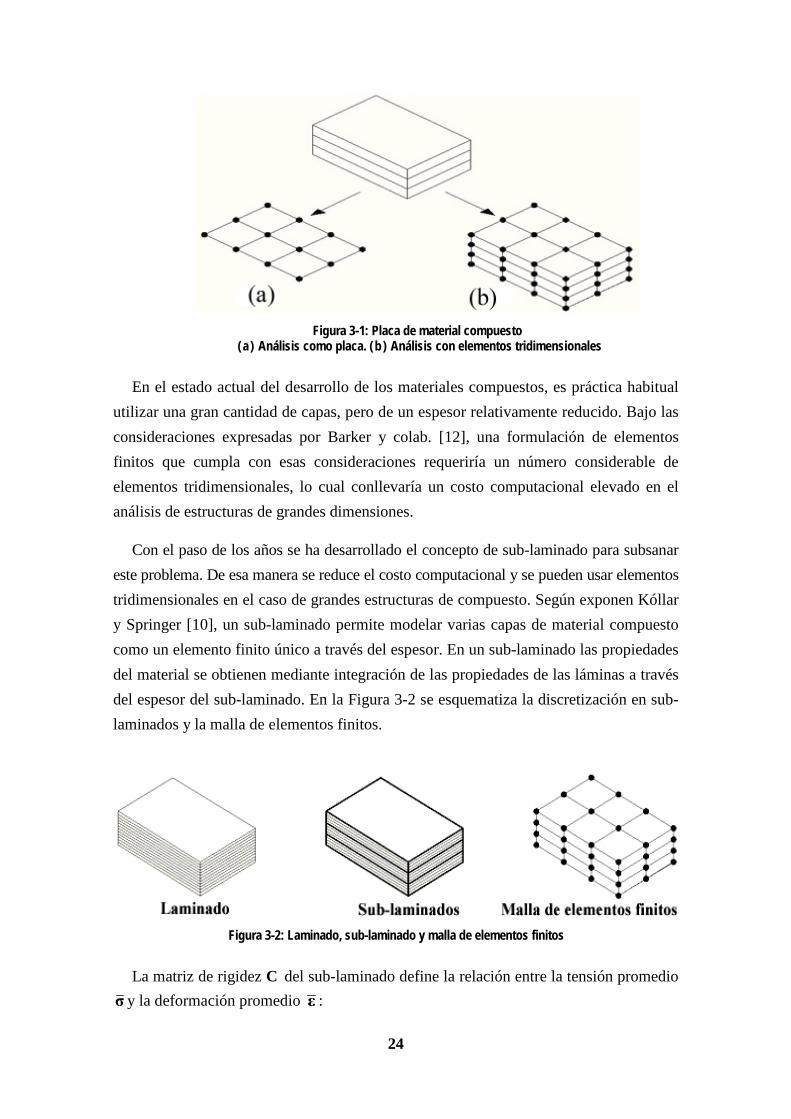
Con el paso de los años se ha desarrollado el concepto de sub-laminado para subsanar este problema. De esa manera se reduce el costo computacional y se pueden usar elementos tridimensionales en el caso de grandes estructuras de compuesto. Según exponen Kóllar y Springer [10], un sub-laminado permite modelar varias capas de material compuesto como un elemento finito único a través del espesor. En un sub-laminado las propiedades del material se obtienen mediante integración de las propiedades de las láminas a través del espesor del sub-laminado. En la Figura 3-2 se esquematiza la discretización en sub-laminados y la malla de elementos finitos.
Figura 3-2: Laminado, sub-laminado y malla de elementos finitos
La matriz de rigidez C del sub-laminado define la relación entre la tensión promedio σ y la deformación promedio ε :

25
x x
y y
z z
yz yz
xz xz
xy xy
εε
σσσττ
εγγ
τ γ
= → =
C Cσ ε (1)
donde los términos que contienen una barra son las tensiones y deformaciones promedio. Denotando los elementos de la matriz de flexibilidad S se tiene:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
εεεγ
σσσ
τγ
τ
γτ
=
x x
y y
z z
yz yz
xz xz
xy xy
S S S S S SS S S S S SS S S S S SS S S S S SS S S S S SS S S S S S
(2)
Las tensiones promedio en (1) y (2) están definidas por las siguientes ecuaciones:
x
y
xy
1 1
1 1
1 1
σ σ σ σ
σ σ τ τ
τ τ τ τ
= = =
= = =
= = =
∫
∫
∫
x x z zhss s
y y xz xzhss s
xy xy yz yzhss s
d z Nh h
dz Nh h
dz Nh h
(3)
donde hs es el espesor del sub-laminado, ( N x , Ny, Nxy ) son los esfuerzos membranales por unidad de longitud y (σx, σy, τxy ) son las tensiones membranales.
Las deformaciones promedio son:
1
1
1
ε ε ε ε
ε εγ γ
γ γ γ γ
= =
= =
= =
∫
∫
∫
yz yz
z z x xhss
y yh
xz xz xy
s
sx
sy
s
h
d zh
dzh
dzh
(4)
En las ecuaciones (3) y (4) se observa que las tensiones σz , τxz , τyz y las deformaciones ε x, ε y, γxy no varían a través del espesor.
Kóllar y Springer [10] indican que los elementos de la matriz S se obtienen asumiendo que el sub-laminado se encuentra sometido a las siguientes condiciones:
• Tensiones en el plano (σx , σy , τxz), que permiten obtener los elementos de la primera, segunda y sexta columna de la matriz.

26
• Tensión normal al plano del laminado (σ z) que permite obtener los elementos de la tercera columna de la matriz.
• Tensiones cortantes fuera del plano (τyz ,τxz ), con las que se determinan los elementos de la cuarta y quinta columna de la matriz.
A partir de la obtención de la matriz de flexibilidad S 6x6 , es posible obtener la matriz de rigidez C del sub-laminado. Esta última matriz permite considerar al laminado como un sólido tridimensional. El desarrollo de la formulación que permite obtener los elementos de la matriz se detalla en el Anexo de esta tesis, y su resultado final es:
11 12 13 16
21 22 23 26
31 32 33 36
44 45
54 55
61 62 63 66
0 00 00 0
0 0 0 00 0 0 0
0 0
S S S SS S S SS S S S
S SS S
S S S S
=
S (5)
donde:
11 12 16
21 22 26
61 62 66
s
S S SS S S hS S S
=
A (5-a)
[ ] ( )( ) 1
31 32 36 31 32 36 11
−−
=
= − ∑M
k k kkk
S S S S S S z z Q A (5-b)
( )
1313 11 12 161
23 21 22 26 231 33
63 61 62 66 63
1 k k
ksk
M
k
CS S S S z zS S S S Ch CS S S S C
−
=
− = −
∑ (5-c)
[ ] ( ) [ ] ( )13
1 133 31 32 36 23
1 133 3363
1 1 M M
k k k k
k ks sk kk
Cz z z zS S S S C
h hC CC
− −
= =
− − = −
∑ ∑ (5-d)
( )44 45 44 45
154 55 1 54 55
1 −=
= − ∑M
k kks k
S S S Sz zS S S Sh (5-e)
En la ecuación (5) los términos Sij no listados son nulos. Como ya se indicó hs es el espesor del sub-laminado, y A 3x3 es la matriz de rigidez que relaciona las fuerzas con las deformaciones generalizadas, definida en las ecuaciones (25) y (26) del Capítulo 2 . zk es la distancia de cada capa al plano de referencia. S y C son las respectivas matrices de flexibilidad y rigidez de la capa única de fibra unidireccional. Estas matrices deben ser calculadas para cada capa del laminado, según la orientación que tienen las fibras dentro de la placa. M es el número total de capas que conforman la placa.
27
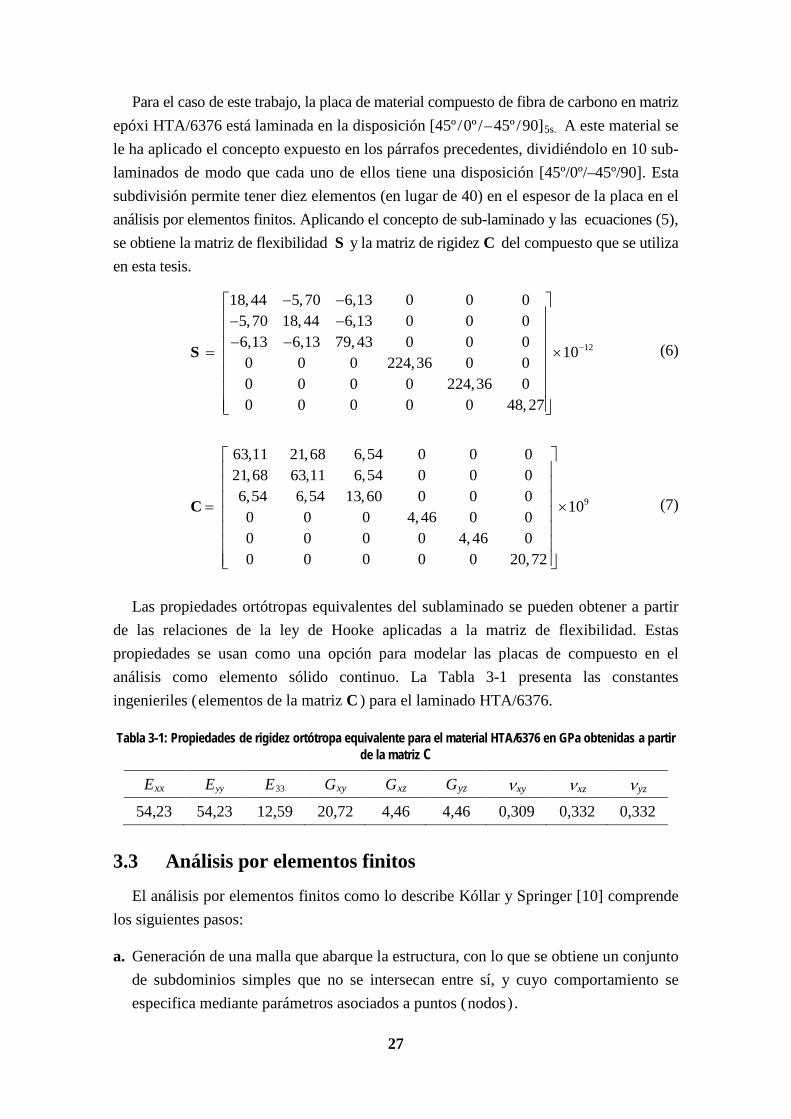
Para el caso de este trabajo, la placa de material compuesto de fibra de carbono en matriz epóxi HTA/6376 está laminada en la disposición [45º /0º /–45º/90]5s. A este material se le ha aplicado el concepto expuesto en los párrafos precedentes, dividiéndolo en 10 sub-laminados de modo que cada uno de ellos tiene una disposición [45º/0º/–45º/90]. Esta subdivisión permite tener diez elementos (en lugar de 40) en el espesor de la placa en el análisis por elementos finitos. Aplicando el concepto de sub-laminado y las ecuaciones (5), se obtiene la matriz de flexibilidad S y la matriz de rigidez C del compuesto que se utiliza en esta tesis.
12
18,44 5,70 6,13 0 0 05,70 18,44 6,13 0 0 06,13 6,13 79,43 0 0 0
100 0 0 224,36 0 00 0 0 0 224,36 00 0 0 0 0 48,27
−
− − − − − − = ×
S (6)
9
63,11 21,68 6,54 0 0 021,68 63,11 6,54 0 0 06,54 6,54 13,60 0 0 0
100 0 0 4,46 0 00 0 0 0 4,46 00 0 0 0 0 20,72
= ×
C (7)
Las propiedades ortótropas equivalentes del sublaminado se pueden obtener a partir de las relaciones de la ley de Hooke aplicadas a la matriz de flexibilidad. Estas propiedades se usan como una opción para modelar las placas de compuesto en el análisis como elemento sólido continuo. La Tabla 3-1 presenta las constantes ingenieriles (elementos de la matriz C ) para el laminado HTA/6376.
Tabla 3-1: Propiedades de rigidez ortótropa equivalente para el material HTA/6376 en GPa obtenidas a partir de la matriz C
Exx Eyy E33 Gxy Gxz Gyz νxy νxz νyz
54,23 54,23 12,59 20,72 4,46 4,46 0,309 0,332 0,332
3.3 Análisis por elementos finitos
El análisis por elementos finitos como lo describe Kóllar y Springer [10] comprende los siguientes pasos:
a. Generación de una malla que abarque la estructura, con lo que se obtiene un conjunto de subdominios simples que no se intersecan entre sí, y cuyo comportamiento se especifica mediante parámetros asociados a puntos (nodos) .
28
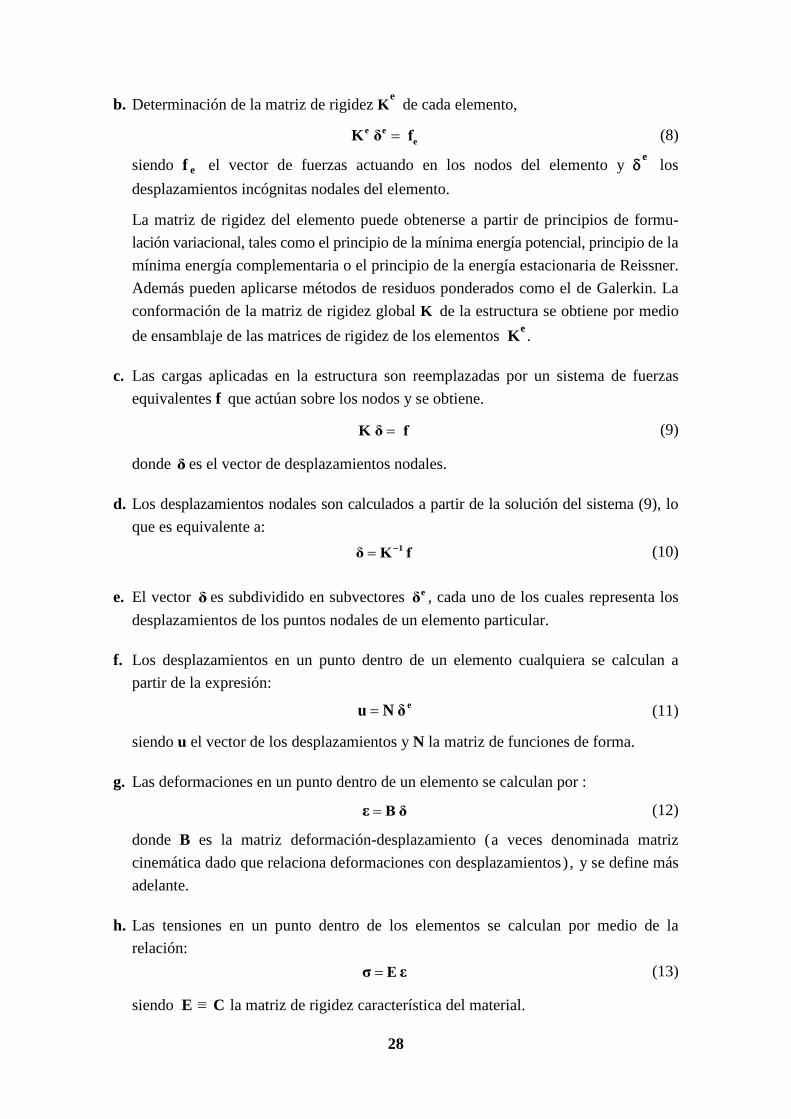
b. Determinación de la matriz de rigidez Ke de cada elemento,
=e eeK δ f (8)
siendo f e el vector de fuerzas actuando en los nodos del elemento y δe los desplazamientos incógnitas nodales del elemento.
La matriz de rigidez del elemento puede obtenerse a partir de principios de formu-lación variacional, tales como el principio de la mínima energía potencial, principio de la mínima energía complementaria o el principio de la energía estacionaria de Reissner. Además pueden aplicarse métodos de residuos ponderados como el de Galerkin. La conformación de la matriz de rigidez global K de la estructura se obtiene por medio de ensamblaje de las matrices de rigidez de los elementos Ke .
c. Las cargas aplicadas en la estructura son reemplazadas por un sistema de fuerzas equivalentes f que actúan sobre los nodos y se obtiene.
=K δ f (9)
donde δ es el vector de desplazamientos nodales.
d. Los desplazamientos nodales son calculados a partir de la solución del sistema (9), lo que es equivalente a:
= 1δ K f− (10)
e. El vector δ es subdividido en subvectores eδ , cada uno de los cuales representa los desplazamientos de los puntos nodales de un elemento particular.
f. Los desplazamientos en un punto dentro de un elemento cualquiera se calculan a partir de la expresión:
= eu N δ (11)
siendo u el vector de los desplazamientos y N la matriz de funciones de forma.
g. Las deformaciones en un punto dentro de un elemento se calculan por :
= Β δε (12)
donde B es la matriz deformación-desplazamiento (a veces denominada matriz cinemática dado que relaciona deformaciones con desplazamientos) , y se define más adelante.
h. Las tensiones en un punto dentro de los elementos se calculan por medio de la relación:
= Εσ ε (13)
siendo E ≡ C la matriz de rigidez característica del material.

29
3.4 Ecuación de gobierno
El principio de los trabajos virtuales provee una alternativa a las ecuaciones de equilibrio para la formulación de problemas por elementos finitos, entre los autores que aplican esta metodología se puede nombrar a Barbero [13], Liu y Quek [14] y Oñate [15]. El uso del principio de trabajos virtuales es la metodología empleada por el software que se ha aplicado en el presente trabajo, tal como lo indica el Manual de Teoría de ABAQUS® [3].
El principio de los trabajos virtuales permite obtener la forma débil de las ecuaciones de movimiento del sólido, y en condiciones estacionarias (despreciando los efectos de aceleraciones) permite recuperar las ecuaciones de equilibrio. En la formulación típica de elementos finitos el principio de trabajos virtuales resulta en:
0σ δε δ δ− − =∫ ∫ ∫i j i j i i i iV S VdV t u dS f u dV (14)
Siendo ti las fuerzas de tracción por unidad de área actuando sobre la superficie, fi son las fuerzas de cuerpo por unidad de volumen, δε ij son las deformaciones virtuales y δui los desplazamientos virtuales. El primer término de la ecuación (14), representa el trabajo virtual interno, desarrollado por las tensiones y los otros términos el trabajo virtual externo, desarrollado por las fuerzas externas.
Expandiendo la ecuación en (14) al estado tridimensional de deformaciones, se obtiene que el trabajo virtual interno está dado por:
( ) δ σ δε σ δε σ δε τ δγ τ δγ τ δγ= + + + + +∫i n t xx xx yy yy zz zz yz yz xz xz xy xyVW dV (15)
que en notación compacta se escribe como
in t δ = ∫ Tσ δεV
W dV (16)
mientras que el trabajo virtual externo está dado por:
δ = +∫ ∫T Tt δu f δuex t S VW dS dV (17)
Teniendo presente las expresiones del Capítulo 2 para las deformaciones, ecuación (1), y para las tensiones, ecuación (3), se tiene:
= uε ∂ (18)
= Cσ ε (19)
Partiendo de (18), y dado que los desplazamientos virtuales son desplazamientos compatibles con los vínculos y con la continuidad estructural, las deformaciones virtuales están dadas por:
=δε δu∂ (20)

30
por tanto, llevando (19) y (20) a (16), el equilibrio entre el trabajo virtual externo (17) y el trabajo virtual interno (16) puede escribirse como:
= +∫ ∫ ∫V S VdV dS dVT T Tε C δu t δu f δu∂ (21)
Las integrales sobre el volumen y la superficie del cuerpo, pueden ser representadas como una sumatoria extendida a los m elementos en que se divide al cuerpo, de modo que:
1 1= =
= + ∑ ∑∫ ∫ ∫m m
V S Ve e
dV dS dVT T Tε C δu t δu f δu∂ (22)
Los desplazamientos dentro del elemento finito se aproximan como una combinación lineal de las funciones de forma N y los desplazamientos nodales d:
=u N d (23)
Reemplazando (23) en (20) y ese resultado a su vez en la componente de trabajo virtual interno para un elemento extraída de (22) tenemos:
= = → =ε Nd B N ε B d∂ ∂ (24)
int δ =
= =∫ ∫T T T T T ed B CB δd d B CB δd d K δde
V Ve eW dV dV (25)
donde Ke es la matriz de rigidez del elemento.
= ∫eV
dVe TK B CB (26)
Trabajando sobre el trabajo virtual externo del elemento, tenemos:
( ) δ = + = + =∫ ∫ ∫ ∫T T T T et δu f δu t N f N δd P δdeex t S V S Ve e e e
W dS dV dS dV (27)
donde Pe representa el vector de fuerzas del elemento.
= +∫ ∫e eS V
dS dVe T TP t N f N (28)
Ensamblando las matrices de rigidez de los elementos eK y los vectores de fuerzas
nodales eP de los elementos, se conforma el sistema global para el cuerpo:
=K d P (29)
3.5 Selección del elemento finito y de las funciones de forma
El análisis que se realiza en este trabajo busca obtener resultados que se aproximen aceptablemente a los reportados por el proyecto BOJCAS [4] y a los obtenidos con los modelos numéricos desarrollados por McCarthy [5], Ekh [16] y otros autores dentro del mismo.
31
El software ABAQUS® permite modelar placas de material compuesto como láminas (shell ) o como elementos sólidos tridimensionales. Song [17] indica que una placa de compuesto generalmente se analiza mediante el uso de elementos de lámina (bidimen-sionales) pero que en ciertos casos se requiere el uso de elementos tridimensionales, eso ocurre cuando:
• los efectos cortantes transversales son importantes.
• las tensiones normales no pueden ser ignoradas.
• se necesita mejorar las definiciones de contacto.
Sobre esa base, se ha optado por modelar el conjunto analizado en el presente trabajo con elementos tridimensionales ya que, como se muestra más adelante, se requiere establecer definiciones de contacto entre sus componentes, además de obtener desplaza-mientos en el sentido transversal en puntos específicos del espesor de las placas.
El elemento seleccionado para el modelado es un hexaedro cuadrático, ya que se adapta mejor a la geometría que el hexaedro lineal y además su uso está recomendado en el Manual de Usuario de ABAQUS® [3]. Se adoptó ese elemento (hexaedro cuadrático) principalmente porque brinda mejores resultados a un menor costo computacional, y además se adapta de mejor manera a geometrías complejas.
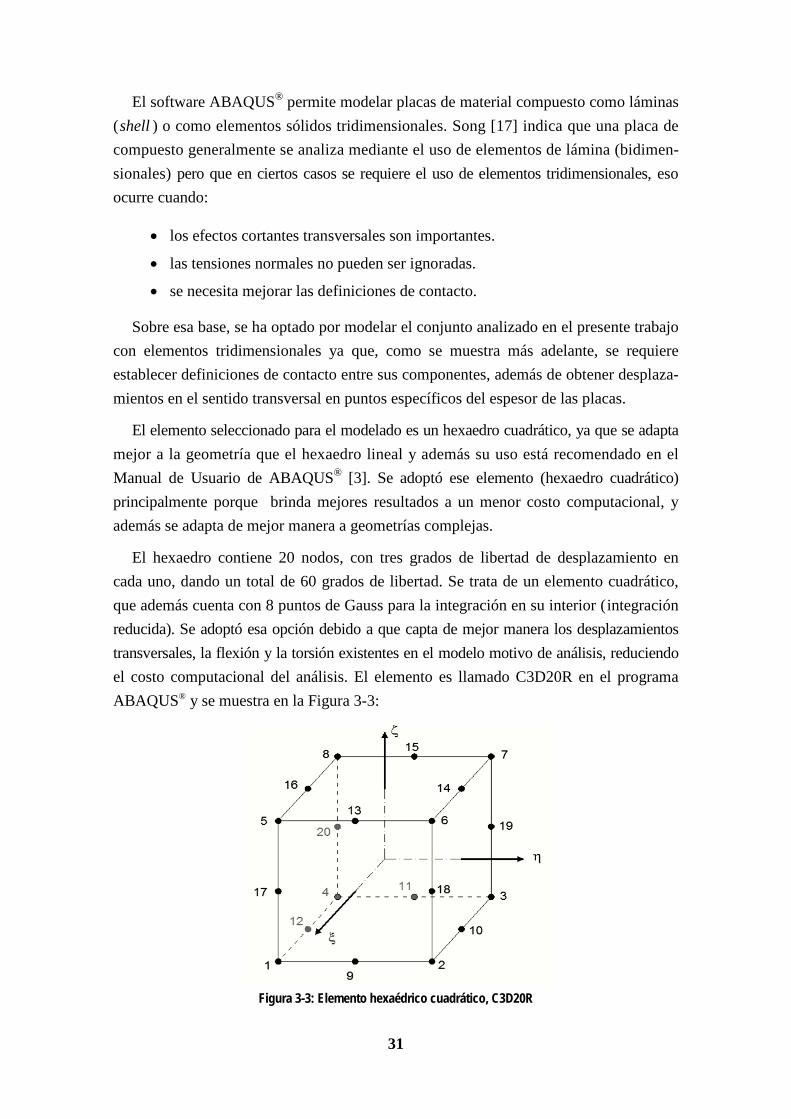
El hexaedro contiene 20 nodos, con tres grados de libertad de desplazamiento en cada uno, dando un total de 60 grados de libertad. Se trata de un elemento cuadrático, que además cuenta con 8 puntos de Gauss para la integración en su interior (integración reducida). Se adoptó esa opción debido a que capta de mejor manera los desplazamientos transversales, la flexión y la torsión existentes en el modelo motivo de análisis, reduciendo el costo computacional del análisis. El elemento es llamado C3D20R en el programa ABAQUS® y se muestra en la Figura 3-3:
Figura 3-3: Elemento hexaédrico cuadrático, C3D20R

32
Las coordenadas de los nodos en el sistema local del elemento (ξ -η -ζ ) cuyo origen está en el centro del mismo, están dadas en la Tabla 3-2.
Tabla 3-2: Coordenadas de los nodos en el elemento hexaédrico serendípito cuadrático
Nodo Coordenada Nodo Coordenada Nodo Coordenada Nodo Coordenada 1 ( 1,–1,–1) 6 ( 1, 1, 1 ) 11 (–1,0,–1) 16 ( 0,–1, 1) 2 ( 1, 1, –1) 7 (–1, 1, 1) 12 (0,–1,–1) 17 ( 1,–1, 0) 3 (–1, 1,–1) 8 (–1,–1, 1) 13 ( 1, 0, 1) 18 ( 1, 1, 0) 4 (–1,–1,–1) 9 ( 1, 0,–1) 14 ( 0, 1, 1) 19 (–1, 1, 0) 5 ( 1, –1, 1) 10 ( 0, 1,–1) 15 (–1, 0, 1) 20 (–1,–1, 0)
Las funciones de forma de este elemento hexaédrico serendípito (elemento cuadrático donde se condensan los nodos de las caras y el nodo centroidal ), son las estándar que se listan en (30), empleadas en todos los códigos de elementos finitos.
( ) ( ) ( ) ( )( )( )
( )( )( ) ( )( )( )
( )( ) ( ) ( )( )( )
( )( )( ) ( )( )( )
( ) ( )
1 2
3 4
5 6
7 8
29
1 1 1 ( 2 ) / 8 1 1 1 ( 2 ) / 8
1 1 1 ( 2) / 8 1 1 1 ( 2) / 8
1 1 1 ( 2 ) / 8 1 1 1 ( 2 ) / 8
1 1 1 ( 2) / 8 1 1 1 ( 2) / 8
1 1 1
N N
N N
N N
N N
N
ξ η ξ ξ η ζ ξ η ζ ξ η ζ
ξ η ζ ξ µ ζ ξ η ξ ξ η ζ
ξ η ζ ξ η ζ ξ η ζ ξ η ζ
ξ η ζ ξ η ζ ξ η ζ ξ η ζ
ξ η
= + − − − − − = + + − + − −
= − + − − + − − = − − − − − − −
= + − + − + − = + + + + + −
= − + + − + + − = − − + − − + −
= + − −( ) ( )( )( )
( )( )( ) ( )( )( )
( )( )( ) ( )( )( )
( )( )( ) ( )( )( )
( )( )( ) ( )( )( )( )( )( ) ( )( )( )
210
2 211 12
2 213 14
2 215 16
2 217 18
2 219 20
/ 4 1 1 1 / 4
1 1 1 / 4 1 1 1 / 4
1 1 1 / 4 1 1 1 / 4
1 1 1 / 4 1 1 1 / 4
1 1 1 / 4 1 1 1 / 4
1 1 1 / 4 1 1 1 / 4
N
N N
N N
N N
N N
N N
ζ ξ η ζ
ξ η ζ ς η ζ
ξ η ζ ξ η ζ
ξ η ζ ξ η ζ
ξ η ζ ξ η ζ
ξ η ζ ξ η ζ
= − + −
= − − − = − − −
= + − + = − + +
= − − + = − − +
= + − − = + + −
= − + − = − − −
(30)
Estas funciones de forma también son usadas para la interpolación de las coordenadas de los nodos del elemento, dado que es un elemento isoparamétrico, lo cual para el presente caso queda de la siguiente manera:
20 20 20
1 1 1
( , , ) ( , , ) ( , , )= = =
= = =∑ ∑ ∑i i i i i ii i i
x N x y N y z N zξ η ζ ξ η ζ ξ η ζ (31)
La matriz de interpolación N para el elemento hexaédrico de 20 nodos con 3 grados de libertad de desplazamiento en cada uno, es de dimensión (3x60) y tiene la siguiente forma:
1 2 3 4 20
1 2 3 4 20
1 2 3 4 20
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0
…… = …… ……
N N N N NN N N N N
N N N N NN (32)
33
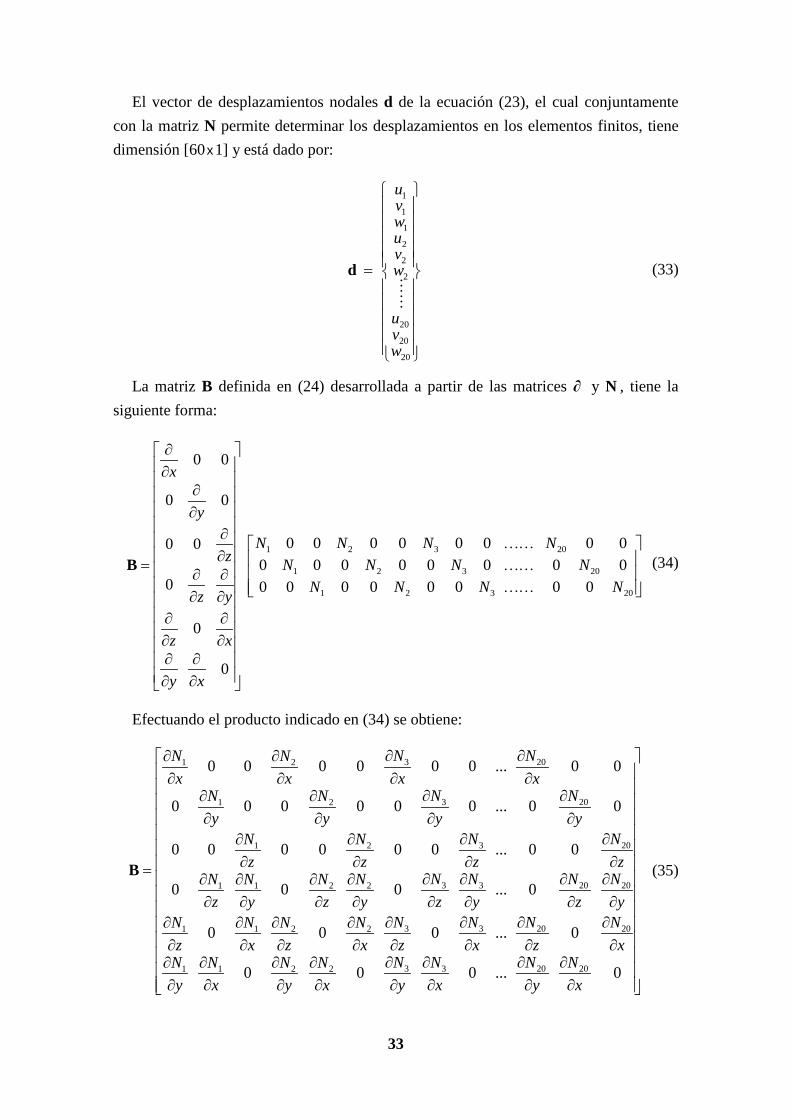
El vector de desplazamientos nodales d de la ecuación (23), el cual conjuntamente con la matriz N permite determinar los desplazamientos en los elementos finitos, tiene dimensión [60x1] y está dado por:
1
1
1
2
2
2
20
20
20
=
uvwuvw
uvw
d (33)
La matriz B definida en (24) desarrollada a partir de las matrices ∂ y N , tiene la siguiente forma:
1 2 3 20
1 2 3 20
1 2 3 20
0 0
0 0
0 0 0 0 0 0 0 00 00 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0
0
∂ ∂ ∂ ∂ ∂ …… ∂ = …… ∂ ∂ …… ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂
x
y
N N N Nz N N N N
N N N Nz y
z x
y x
B (34)
Efectuando el producto indicado en (34) se obtiene:
3 201 2
3 201 2
3 201 2
3 3 20 201 1 2 2
3 3 20 201 1 2 2
1
0 0 0 0 0 0 ... 0 0
0 0 0 0 0 0 ... 0 0
0 0 0 0 0 0 ... 0 0
0 0 0 ... 0
0 0 0 ... 0
N NN Nx x x x
N NN Ny y y y
N NN Nz z z z
N N N NN N N Nz y z y z y z y
N N N NN N N Nz x z x z x z x
N
∂ ∂∂ ∂∂ ∂ ∂ ∂
∂ ∂∂ ∂∂ ∂ ∂ ∂
∂ ∂∂ ∂∂ ∂ ∂ ∂= ∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂∂
B
3 3 20 201 2 20 0 0 ... 0N N N NN N Ny x y x y x y x
∂ ∂ ∂ ∂∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂
(35)

34
Dado que las funciones de forma mostradas en (30) están definidas en términos de las coordenadas naturales ‘ξ ’, ‘η’ y ‘ζ ’, sus derivadas respecto a ‘x’, ‘y’ y ‘z’ se obtienen aplicando la regla de la cadena para derivadas parciales, lo cual se expresa matricialmente como:
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ = → = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
i i
i i
i i
Nx y z Nx
N Nx y zy
x y z N Nz
ξξ ξ ξ
η η η η
ζ ζ ζ ζ
G G (36)
donde G es la matriz jacobiana de la transformación, la cual generalmente se denota con la letra J. La matriz jacobiana también puede relacionarse con las funciones de interpolación a través de reemplazar las coordenadas x, y y z por las relaciones planteadas en (30), quedando de la forma:
20 20 20
1 1 1
2020 20
1 1 12020 20
1 1 1
ξ ξ ξ
η η η
ζ ζ ζ
= = =
= = =
= = =
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ =
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂
∑ ∑ ∑
∑∑ ∑
∑∑ ∑
i i ii i i
i i i
i i ii i i
i i i
i i ii i i
i i i
N N Nx y z
N N Nx y z
N N Nx y z
G (37)
Invirtiendo la matriz G dada en (37) y reemplazando en (36) se obtiene:
ii
i i
ii
NNx
N Ny
NNz
ξ
η
ζ
−
∂ ∂ ∂∂ ∂ ∂ = ∂ ∂
∂∂ ∂∂
1G (38)
Esta expresión permite desarrollar la matriz B mostrada en (34) en función de las
coordenadas naturales, a partir de lo cual se puede determinar la matriz de rigidez eKdel elemento tridimensional que figura en las ecuaciones (25) y (26) y que se repite a continuación como ecuación (39):
= ∫eV
dVe TK B CB (39)
1 1 1
1 1 1
det− − −
= ∫ ∫ ∫ d d dξ η ζe TK B CB G (40)
35
CAPÍTULO 4
4 ANÁLISIS NUMÉRICO DE UNIONES DE MATERIAL COMPUESTO ABULONADAS
4.1 Introducción
La vinculación de piezas de material compuesto es un ítem que requiere especial atención durante el diseño de estructuras, especialmente en la industria aeroespacial. Esas vinculaciones suelen tener alta influencia sobre la capacidad de soportar cargas y transmitirlas. En el caso específico de las uniones abulonadas, debido a la presencia del bulón y del agujero en el material, las tensiones y deformaciones pueden variar tridimen-sionalmente. Los factores que intervienen en ese tipo de vinculaciones son: la flexión de las partes unidas y la inclinación que experimenta el bulón causada por la aplicación de la carga excéntrica. Esos dos aspectos afectan directamente al compuesto, en el que pueden aparecer modos de falla asociados a los mismos.
El análisis de uniones de material compuesto se ha encarado por métodos analíticos y por medio del análisis numérico, esto último ha sido realizado en el pasado mayorita-riamente con modelos bidimensionales. El desarrollo computacional de los últimos años ha hecho que sea más habitual llevar a cabo análisis tridimensionales, los cuales inicialmente se realizaban apilando elementos sólidos ortótropos que representaban las capas del compuesto. Además, por supuesto, se empleaban procedimientos experimentales que permitían obtener propiedades equivalentes de las placas de material. En la actualidad, a través de módulos específicos para materiales compuestos, estas propiedades equiva-lentes son incorporadas en los códigos comerciales de resolución por elementos finitos.
En el año 2001 se desarrolló el proyecto “BOJCAS - Bolted joints in composite aircraft structures” [4], en el que se analizó el comportamiento de uniones abulonadas de materiales compuestos. En ese proyecto se realizaron procedimientos tanto experimentales como numéricos, aplicando cargas de tracción sobre conjuntos de placas abulonadas con solape simple. Posteriormente y aun como parte de ese proyecto, McCarthy, et al. [5] desarrollaron modelos numéricos para contrastarlos con los resultados experimentales del proyecto BOJCAS. En el trabajo de McCarthy se utilizó como base las mismas formas, disposiciones y componentes de los materiales ensayados experimentalmente en el proyecto BOJCAS.
El modelo que se desarrolla en este capítulo está basado en los materiales y características geométricas utilizados en los trabajos antes mencionados. El modelo se basa en el empleo del software comercial de análisis por elementos finitos ABAQUS®, y los resultados del mismo se contrastan con los obtenidos en el proyecto BOJCAS.
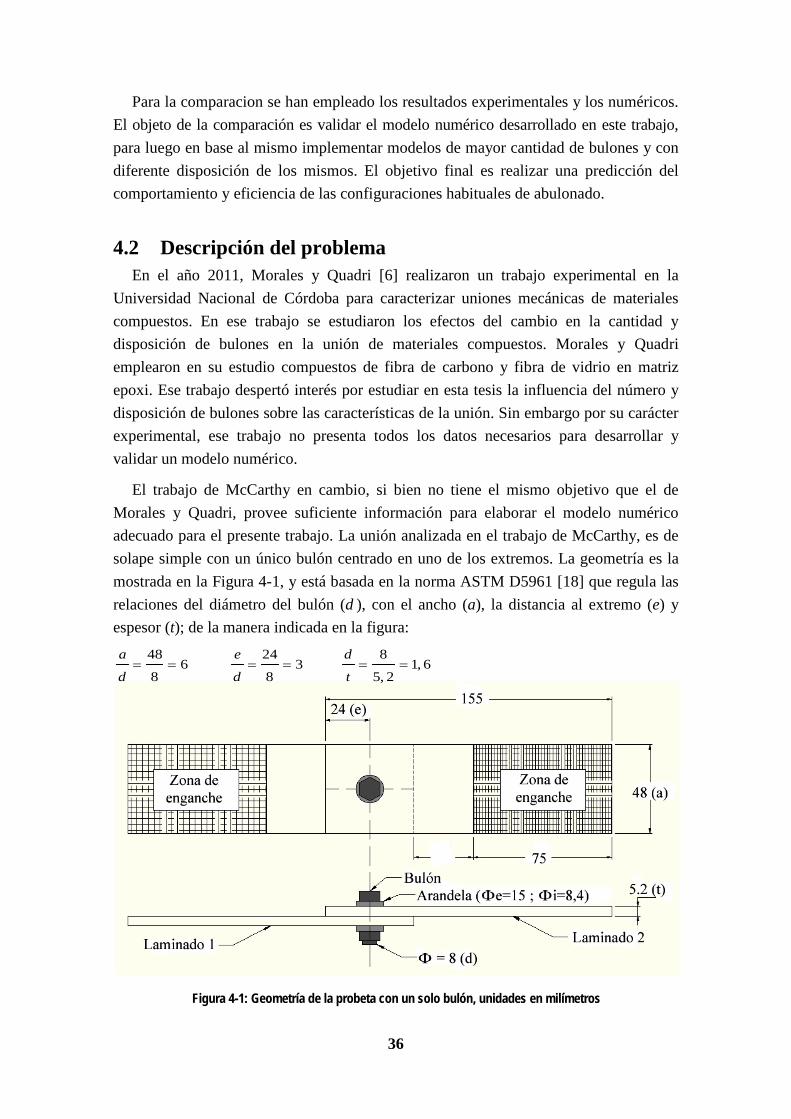
36
Para la comparacion se han empleado los resultados experimentales y los numéricos. El objeto de la comparación es validar el modelo numérico desarrollado en este trabajo, para luego en base al mismo implementar modelos de mayor cantidad de bulones y con diferente disposición de los mismos. El objetivo final es realizar una predicción del comportamiento y eficiencia de las configuraciones habituales de abulonado.
4.2 Descripción del problema En el año 2011, Morales y Quadri [6] realizaron un trabajo experimental en la
Universidad Nacional de Córdoba para caracterizar uniones mecánicas de materiales compuestos. En ese trabajo se estudiaron los efectos del cambio en la cantidad y disposición de bulones en la unión de materiales compuestos. Morales y Quadri emplearon en su estudio compuestos de fibra de carbono y fibra de vidrio en matriz epoxi. Ese trabajo despertó interés por estudiar en esta tesis la influencia del número y disposición de bulones sobre las características de la unión. Sin embargo por su carácter experimental, ese trabajo no presenta todos los datos necesarios para desarrollar y validar un modelo numérico.
El trabajo de McCarthy en cambio, si bien no tiene el mismo objetivo que el de Morales y Quadri, provee suficiente información para elaborar el modelo numérico adecuado para el presente trabajo. La unión analizada en el trabajo de McCarthy, es de solape simple con un único bulón centrado en uno de los extremos. La geometría es la mostrada en la Figura 4-1, y está basada en la norma ASTM D5961 [18] que regula las relaciones del diámetro del bulón (d ), con el ancho (a), la distancia al extremo (e) y espesor (t); de la manera indicada en la figura:
Figura 4-1: Geometría de la probeta con un solo bulón, unidades en milímetros
48 24 86 3 1, 6
8 8 5, 2= = = = = =
a e d
d d t
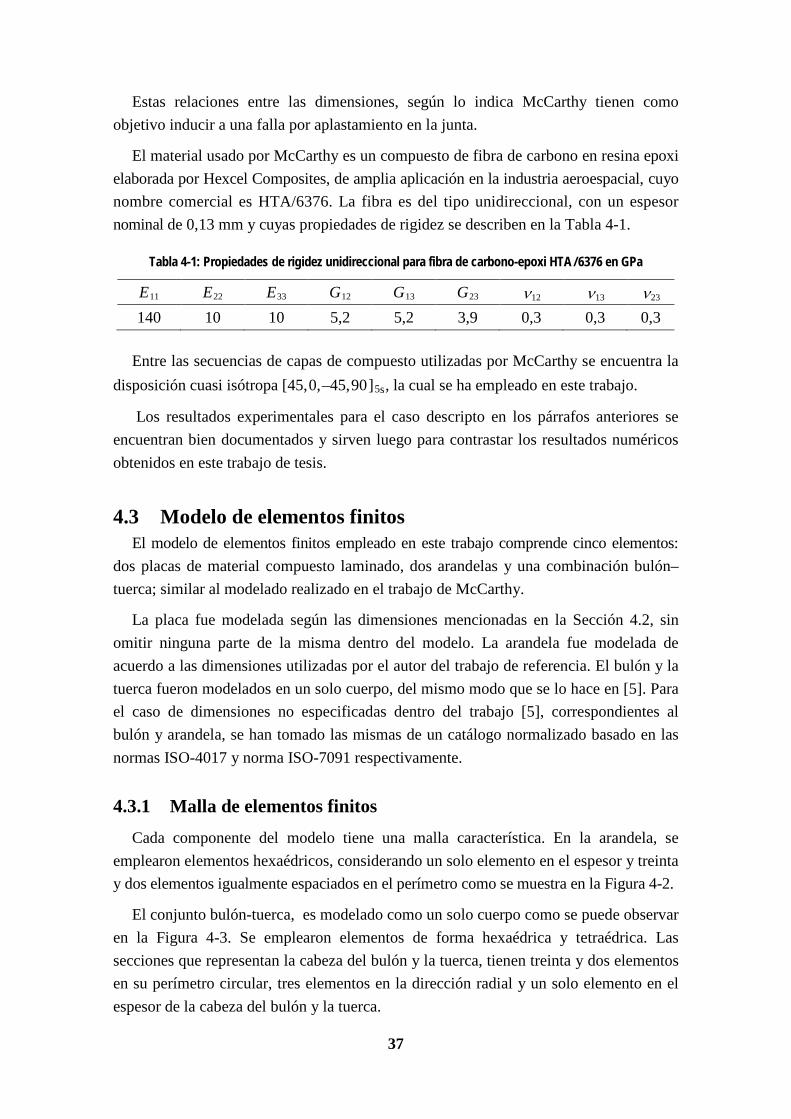
37
Estas relaciones entre las dimensiones, según lo indica McCarthy tienen como objetivo inducir a una falla por aplastamiento en la junta.
El material usado por McCarthy es un compuesto de fibra de carbono en resina epoxi elaborada por Hexcel Composites, de amplia aplicación en la industria aeroespacial, cuyo nombre comercial es HTA/6376. La fibra es del tipo unidireccional, con un espesor nominal de 0,13 mm y cuyas propiedades de rigidez se describen en la Tabla 4-1.
Tabla 4-1: Propiedades de rigidez unidireccional para fibra de carbono-epoxi HTA / 6376 en GPa
E11 E22 E33 G12 G13 G23 ν12 ν13 ν23 140 10 10 5,2 5,2 3,9 0,3 0,3 0,3
Entre las secuencias de capas de compuesto utilizadas por McCarthy se encuentra la disposición cuasi isótropa [45,0,–45,90]5s, la cual se ha empleado en este trabajo.
Los resultados experimentales para el caso descripto en los párrafos anteriores se encuentran bien documentados y sirven luego para contrastar los resultados numéricos obtenidos en este trabajo de tesis.
4.3 Modelo de elementos finitos El modelo de elementos finitos empleado en este trabajo comprende cinco elementos:
dos placas de material compuesto laminado, dos arandelas y una combinación bulón–tuerca; similar al modelado realizado en el trabajo de McCarthy.
La placa fue modelada según las dimensiones mencionadas en la Sección 4.2, sin omitir ninguna parte de la misma dentro del modelo. La arandela fue modelada de acuerdo a las dimensiones utilizadas por el autor del trabajo de referencia. El bulón y la tuerca fueron modelados en un solo cuerpo, del mismo modo que se lo hace en [5]. Para el caso de dimensiones no especificadas dentro del trabajo [5], correspondientes al bulón y arandela, se han tomado las mismas de un catálogo normalizado basado en las normas ISO-4017 y norma ISO-7091 respectivamente.
4.3.1 Malla de elementos finitos Cada componente del modelo tiene una malla característica. En la arandela, se
emplearon elementos hexaédricos, considerando un solo elemento en el espesor y treinta y dos elementos igualmente espaciados en el perímetro como se muestra en la Figura 4-2.
El conjunto bulón-tuerca, es modelado como un solo cuerpo como se puede observar en la Figura 4-3. Se emplearon elementos de forma hexaédrica y tetraédrica. Las secciones que representan la cabeza del bulón y la tuerca, tienen treinta y dos elementos en su perímetro circular, tres elementos en la dirección radial y un solo elemento en el espesor de la cabeza del bulón y la tuerca.
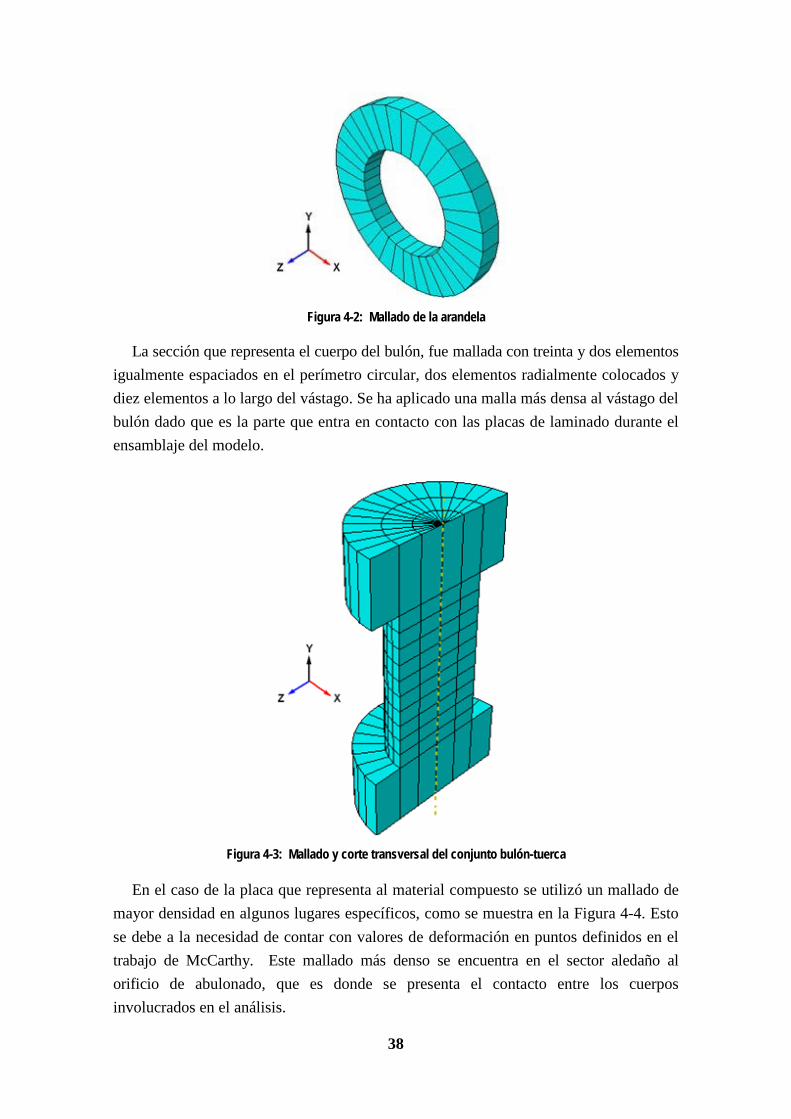
38
Figura 4-2: Mallado de la arandela
La sección que representa el cuerpo del bulón, fue mallada con treinta y dos elementos igualmente espaciados en el perímetro circular, dos elementos radialmente colocados y diez elementos a lo largo del vástago. Se ha aplicado una malla más densa al vástago del bulón dado que es la parte que entra en contacto con las placas de laminado durante el ensamblaje del modelo.
Figura 4-3: Mallado y corte transversal del conjunto bulón-tuerca
En el caso de la placa que representa al material compuesto se utilizó un mallado de mayor densidad en algunos lugares específicos, como se muestra en la Figura 4-4. Esto se debe a la necesidad de contar con valores de deformación en puntos definidos en el trabajo de McCarthy. Este mallado más denso se encuentra en el sector aledaño al orificio de abulonado, que es donde se presenta el contacto entre los cuerpos involucrados en el análisis.
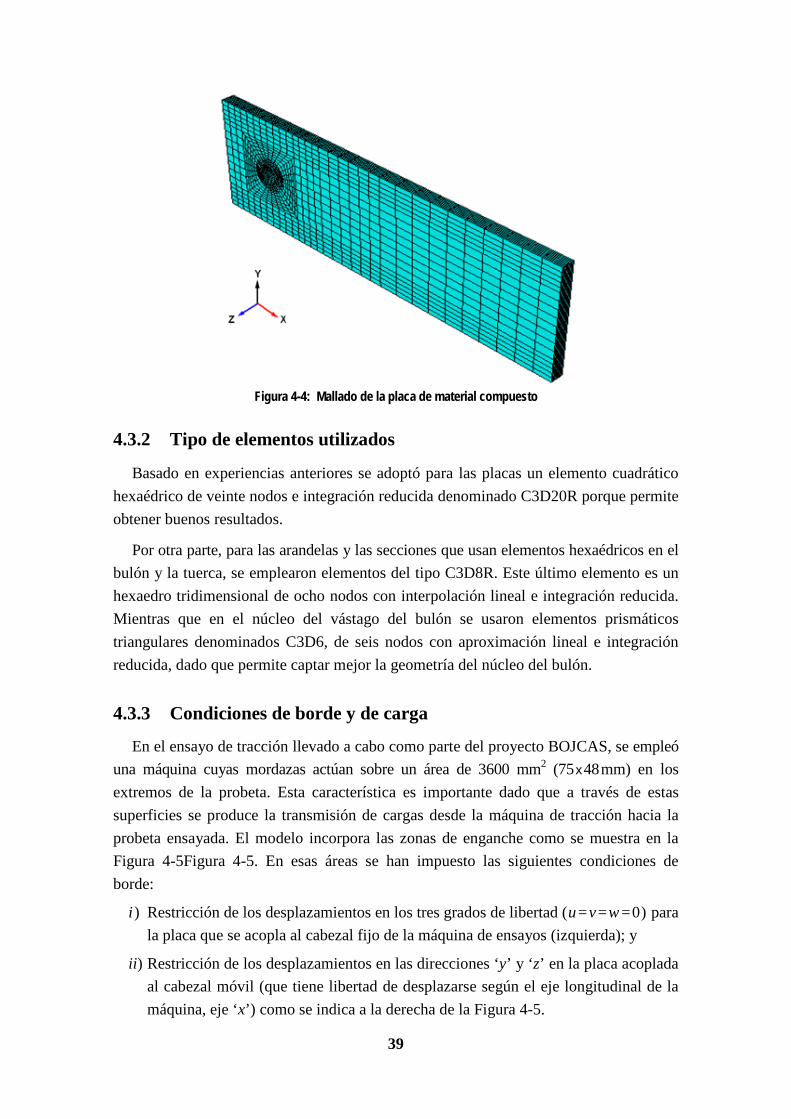
39
Figura 4-4: Mallado de la placa de material compuesto
4.3.2 Tipo de elementos utilizados
Basado en experiencias anteriores se adoptó para las placas un elemento cuadrático hexaédrico de veinte nodos e integración reducida denominado C3D20R porque permite obtener buenos resultados.
Por otra parte, para las arandelas y las secciones que usan elementos hexaédricos en el bulón y la tuerca, se emplearon elementos del tipo C3D8R. Este último elemento es un hexaedro tridimensional de ocho nodos con interpolación lineal e integración reducida. Mientras que en el núcleo del vástago del bulón se usaron elementos prismáticos triangulares denominados C3D6, de seis nodos con aproximación lineal e integración reducida, dado que permite captar mejor la geometría del núcleo del bulón.
4.3.3 Condiciones de borde y de carga
En el ensayo de tracción llevado a cabo como parte del proyecto BOJCAS, se empleó una máquina cuyas mordazas actúan sobre un área de 3600 mm2 (75x48mm) en los extremos de la probeta. Esta característica es importante dado que a través de estas superficies se produce la transmisión de cargas desde la máquina de tracción hacia la probeta ensayada. El modelo incorpora las zonas de enganche como se muestra en la Figura 4-5Figura 4-5. En esas áreas se han impuesto las siguientes condiciones de borde:
i) Restricción de los desplazamientos en los tres grados de libertad (u=v=w=0) para la placa que se acopla al cabezal fijo de la máquina de ensayos (izquierda); y
ii) Restricción de los desplazamientos en las direcciones ‘y’ y ‘z’ en la placa acoplada al cabezal móvil (que tiene libertad de desplazarse según el eje longitudinal de la máquina, eje ‘x’) como se indica a la derecha de la Figura 4-5.
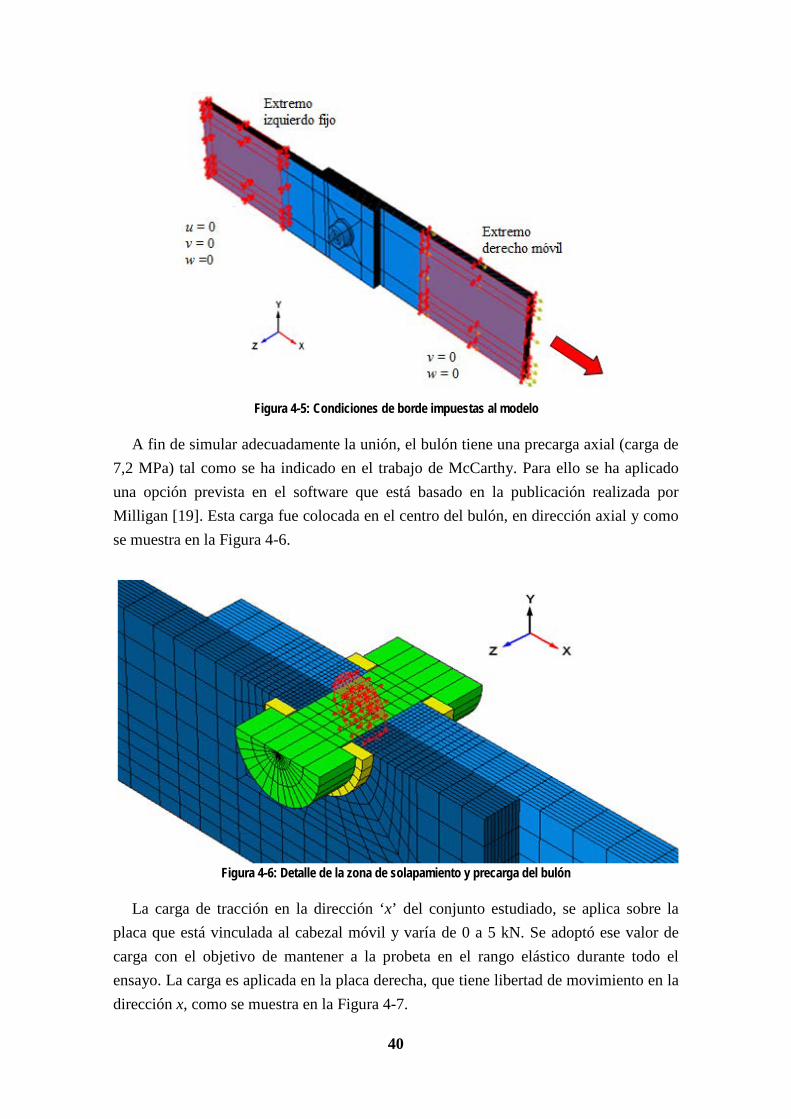
40
Figura 4-5: Condiciones de borde impuestas al modelo
A fin de simular adecuadamente la unión, el bulón tiene una precarga axial (carga de 7,2 MPa) tal como se ha indicado en el trabajo de McCarthy. Para ello se ha aplicado una opción prevista en el software que está basado en la publicación realizada por Milligan [19]. Esta carga fue colocada en el centro del bulón, en dirección axial y como se muestra en la Figura 4-6.
Figura 4-6: Detalle de la zona de solapamiento y precarga del bulón
La carga de tracción en la dirección ‘x’ del conjunto estudiado, se aplica sobre la placa que está vinculada al cabezal móvil y varía de 0 a 5 kN. Se adoptó ese valor de carga con el objetivo de mantener a la probeta en el rango elástico durante todo el ensayo. La carga es aplicada en la placa derecha, que tiene libertad de movimiento en la dirección x, como se muestra en la Figura 4-7.
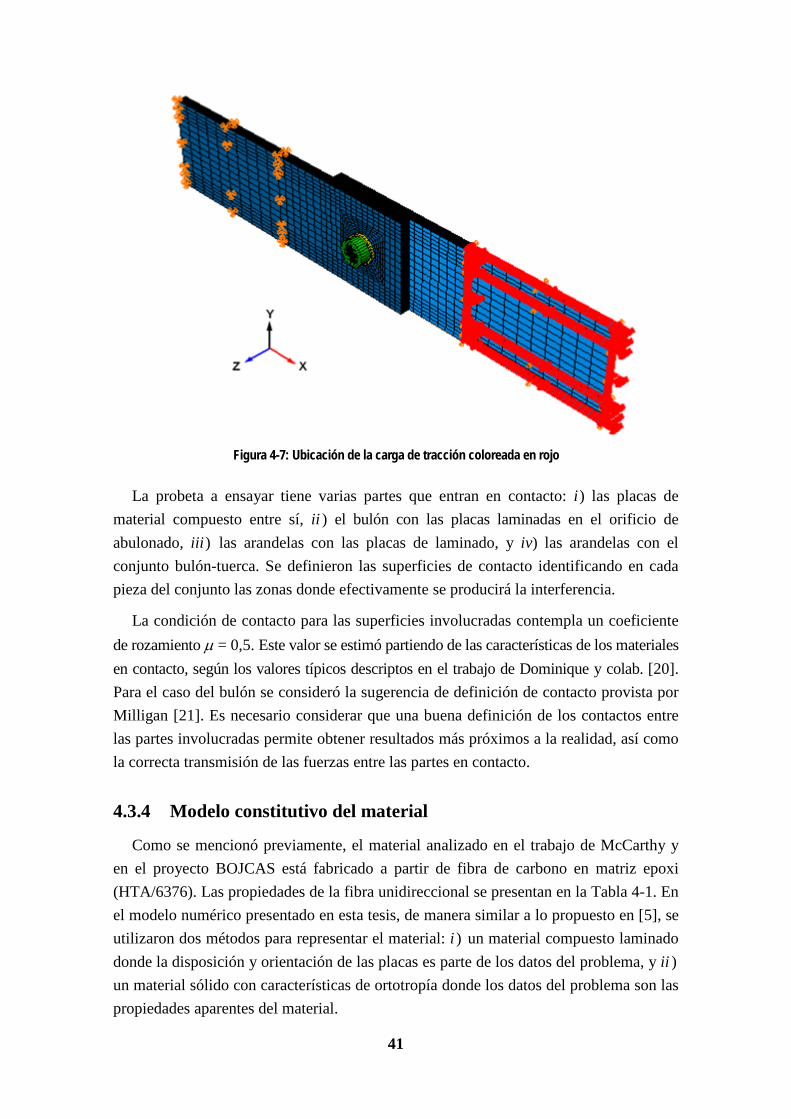
41
Figura 4-7: Ubicación de la carga de tracción coloreada en rojo
La probeta a ensayar tiene varias partes que entran en contacto: i) las placas de material compuesto entre sí, ii ) el bulón con las placas laminadas en el orificio de abulonado, iii) las arandelas con las placas de laminado, y iv) las arandelas con el conjunto bulón-tuerca. Se definieron las superficies de contacto identificando en cada pieza del conjunto las zonas donde efectivamente se producirá la interferencia.
La condición de contacto para las superficies involucradas contempla un coeficiente de rozamiento µ = 0,5. Este valor se estimó partiendo de las características de los materiales en contacto, según los valores típicos descriptos en el trabajo de Dominique y colab. [20]. Para el caso del bulón se consideró la sugerencia de definición de contacto provista por Milligan [21]. Es necesario considerar que una buena definición de los contactos entre las partes involucradas permite obtener resultados más próximos a la realidad, así como la correcta transmisión de las fuerzas entre las partes en contacto.
4.3.4 Modelo constitutivo del material
Como se mencionó previamente, el material analizado en el trabajo de McCarthy y en el proyecto BOJCAS está fabricado a partir de fibra de carbono en matriz epoxi (HTA/6376). Las propiedades de la fibra unidireccional se presentan en la Tabla 4-1. En el modelo numérico presentado en esta tesis, de manera similar a lo propuesto en [5], se utilizaron dos métodos para representar el material: i ) un material compuesto laminado donde la disposición y orientación de las placas es parte de los datos del problema, y ii ) un material sólido con características de ortotropía donde los datos del problema son las propiedades aparentes del material.
42
Al definir el material laminado se contemplan las capas de material dispuestas de acuerdo a lo realizado en el experimento. Se han considerado cuarenta capas con las propiedades dadas en la Tabla 4-1 y una configuración cuasi isótropa [45,0,–45,90]5s
utilizando las opciones previstas por ABAQUS® para ese efecto. En el caso de considerar las propiedades mecánicas equivalentes, al igual que en [4] y [5], se han aplicado las propiedades que se muestran en la Tabla 4-2.
Tabla 4-2: Propiedades de rigidez ortótropa equivalente para la configuración [45,0,-45,90]5s de fibra HTA/6376 en [GPa]
Exx Eyy E33 Gxy Gxz Gyz νxy νxz νyz 54,25 54,25 12,59 20,72 4,55 4,55 0,309 0,332 0,332
Los otros componentes de la junta fueron modelados con materiales isótropos, el
conjunto bulón-tuerca se considera fabricado en titanio y las arandelas construidas con acero. Las propiedades utilizadas para estos elementos se muestran en la Tabla 4-3.
Tabla 4-3: Propiedades de los materiales isótropos utilizados en el modelo
Material E [GPa] ν Acero 210 0,30 Titanio 110 0,29
Resulta importante destacar que las propiedades de rigidez equivalente que se presentan en la Tabla 4-2, son muy similares a las que se pueden obtener al despejarlas de los elementos de la matriz de flexibilidad del sub-laminado [45º/0º/–45º/90º] que se presentan en la Tabla 3-1 del Capítulo 3. Las pequeñas diferencias que se aprecian pueden ser atribuidas a que las propiedades equivalentes deducidas por McCarthy en su trabajo fueron obtenidas por medios analíticos y afinadas mediante procesos experimentales donde pueden influir factores externos.
4.4 Validación numérica y experimental del modelo propuesto Para realizar la validación del modelo propuesto en este trabajo, se compararon los
resultados obtenidos (este trabajo) con los experimentales [4] y numéricos [5]. Los resultados mostrados en [5] han sido cotejados contra los dados en BOJCAS, siguiendo en particular dos grupos de variables:
1. Las deformaciones en puntos específicos de la superficie de la placa de compuesto.
2. La rigidez de la unión.
En la experimentación se instrumentaron ocho galgas extensiométricas, ubicadas en el sector del abulonado y dispuestas como se muestra en la Figura 4-8. La deformación experimental medida en las 8 galgas extensiométricas se ha graficado en la Figura 4-9.
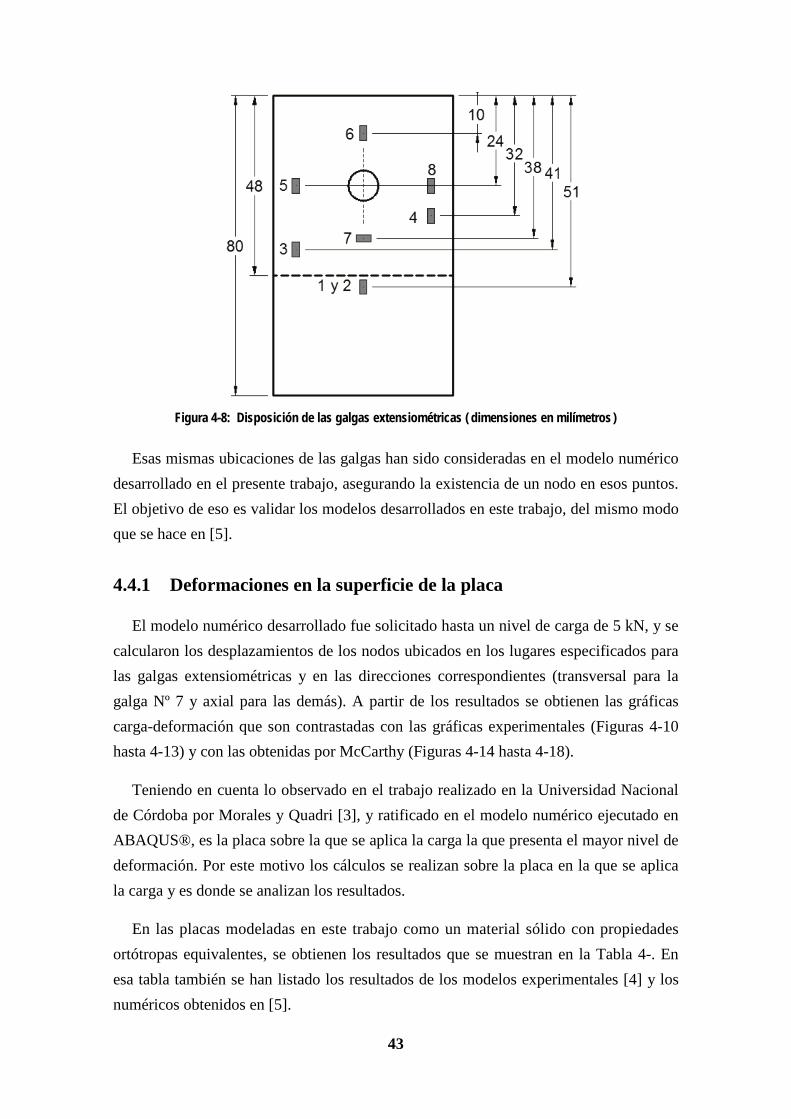
43
Figura 4-8: Disposición de las galgas extensiométricas ( dimensiones en milímetros )
Esas mismas ubicaciones de las galgas han sido consideradas en el modelo numérico desarrollado en el presente trabajo, asegurando la existencia de un nodo en esos puntos. El objetivo de eso es validar los modelos desarrollados en este trabajo, del mismo modo que se hace en [5].
4.4.1 Deformaciones en la superficie de la placa
El modelo numérico desarrollado fue solicitado hasta un nivel de carga de 5 kN, y se calcularon los desplazamientos de los nodos ubicados en los lugares especificados para las galgas extensiométricas y en las direcciones correspondientes (transversal para la galga Nº 7 y axial para las demás). A partir de los resultados se obtienen las gráficas carga-deformación que son contrastadas con las gráficas experimentales (Figuras 4-10 hasta 4-13) y con las obtenidas por McCarthy (Figuras 4-14 hasta 4-18).
Teniendo en cuenta lo observado en el trabajo realizado en la Universidad Nacional de Córdoba por Morales y Quadri [3], y ratificado en el modelo numérico ejecutado en ABAQUS®, es la placa sobre la que se aplica la carga la que presenta el mayor nivel de deformación. Por este motivo los cálculos se realizan sobre la placa en la que se aplica la carga y es donde se analizan los resultados.
En las placas modeladas en este trabajo como un material sólido con propiedades ortótropas equivalentes, se obtienen los resultados que se muestran en la Tabla 4-. En esa tabla también se han listado los resultados de los modelos experimentales [4] y los numéricos obtenidos en [5].
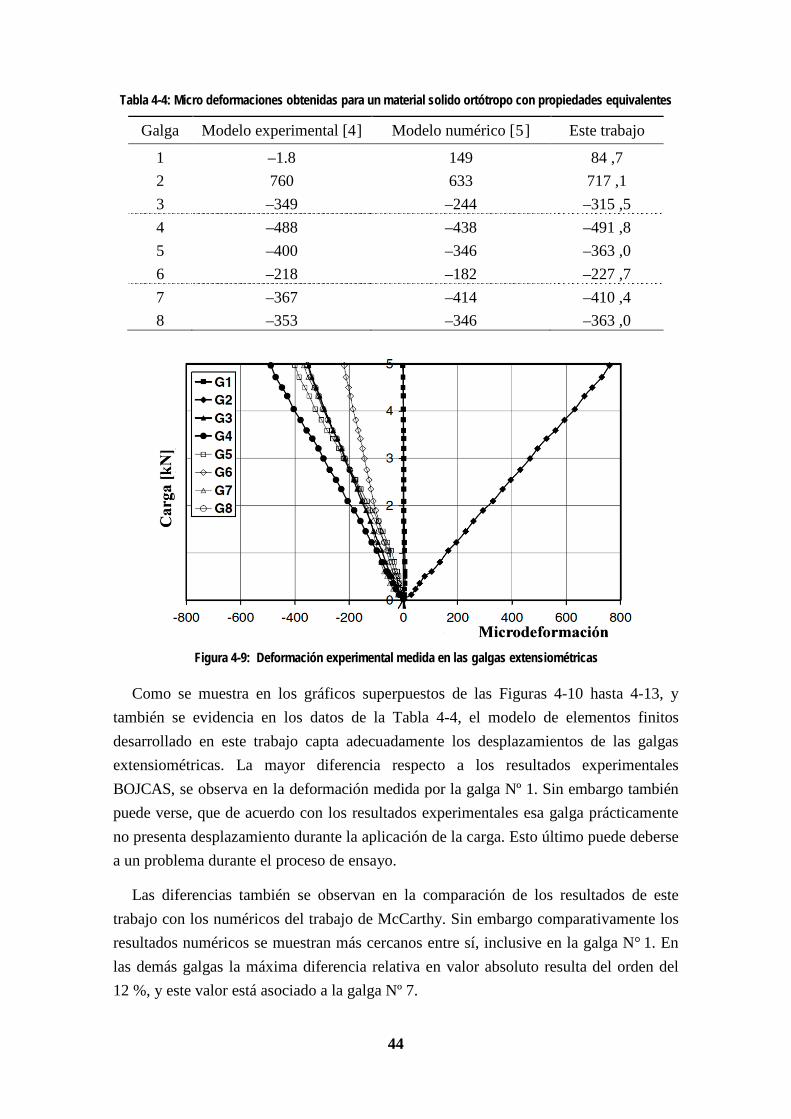
44
Tabla 4-4: Micro deformaciones obtenidas para un material solido ortótropo con propiedades equivalentes
Galga Modelo experimental [4] Modelo numérico [5] Este trabajo
1 –1.8 149 84 ,7 2 760 633 717 ,1 3 –349 –244 –315 ,5 4 –488 –438 –491 ,8 5 –400 –346 –363 ,0 6 –218 –182 –227 ,7 7 –367 –414 –410 ,4 8 –353 –346 –363 ,0
Figura 4-9: Deformación experimental medida en las galgas extensiométricas
Como se muestra en los gráficos superpuestos de las Figuras 4-10 hasta 4-13, y también se evidencia en los datos de la Tabla 4-4, el modelo de elementos finitos desarrollado en este trabajo capta adecuadamente los desplazamientos de las galgas extensiométricas. La mayor diferencia respecto a los resultados experimentales BOJCAS, se observa en la deformación medida por la galga Nº 1. Sin embargo también puede verse, que de acuerdo con los resultados experimentales esa galga prácticamente no presenta desplazamiento durante la aplicación de la carga. Esto último puede deberse a un problema durante el proceso de ensayo.
Las diferencias también se observan en la comparación de los resultados de este trabajo con los numéricos del trabajo de McCarthy. Sin embargo comparativamente los resultados numéricos se muestran más cercanos entre sí, inclusive en la galga N° 1. En las demás galgas la máxima diferencia relativa en valor absoluto resulta del orden del 12 %, y este valor está asociado a la galga Nº 7.
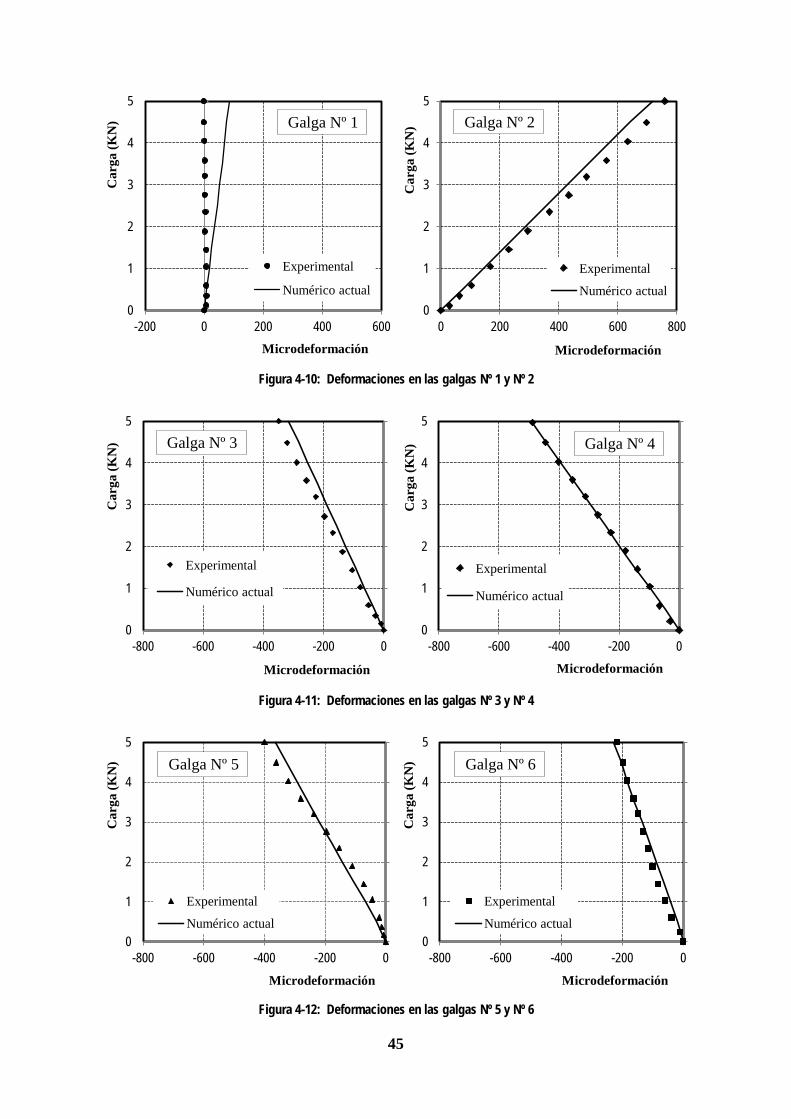
45
Figura 4-10: Deformaciones en las galgas Nº 1 y Nº 2
Figura 4-11: Deformaciones en las galgas Nº 3 y Nº 4
Figura 4-12: Deformaciones en las galgas Nº 5 y Nº 6
0
1
2
3
4
5
-200 0 200 400 600
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual 0
1
2
3
4
5
0 200 400 600 800
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual 0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental
Numérico actual
Galga Nº 1 Galga Nº 2
Galga Nº 4 Galga Nº 3
Galga Nº 6 Galga Nº 5
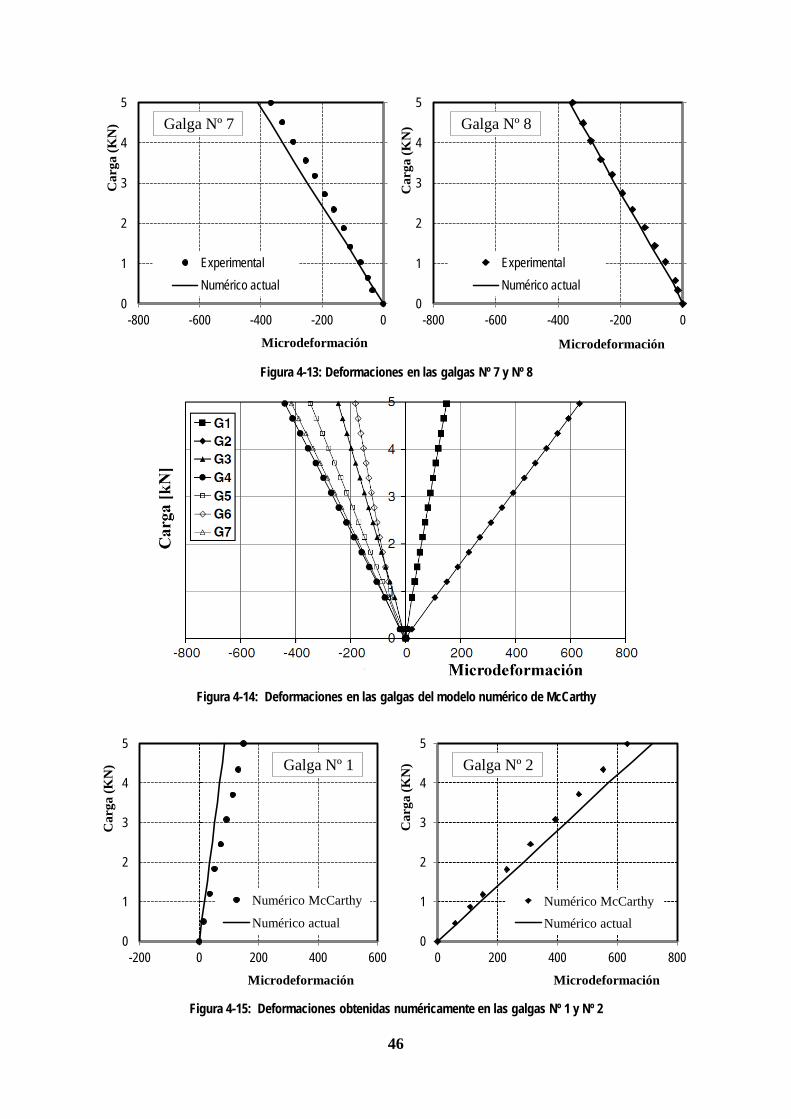
46
Figura 4-13: Deformaciones en las galgas Nº 7 y Nº 8
Figura 4-14: Deformaciones en las galgas del modelo numérico de McCarthy
Figura 4-15: Deformaciones obtenidas numéricamente en las galgas Nº 1 y Nº 2
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Experimental Numérico actual
0
1
2
3
4
5
-200 0 200 400 600
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual 0
1
2
3
4
5
0 200 400 600 800
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual
Galga Nº 7 Galga Nº 8
Galga Nº 1 Galga Nº 2
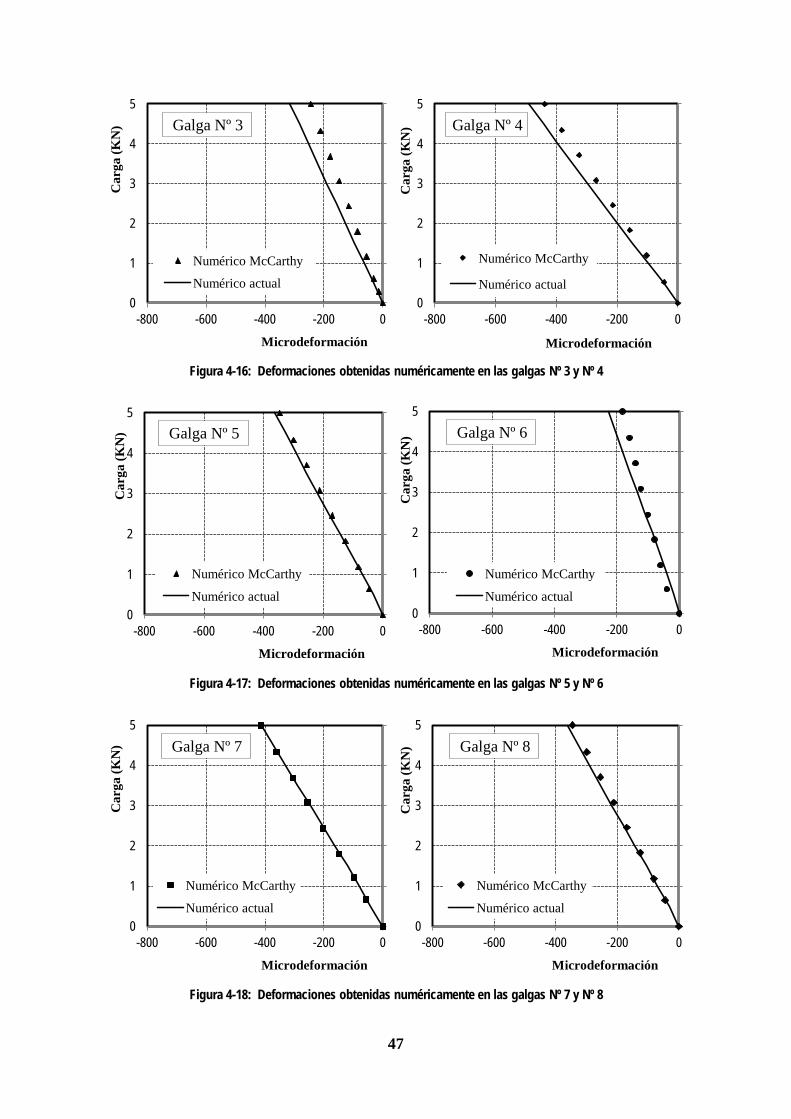
47
Figura 4-16: Deformaciones obtenidas numéricamente en las galgas Nº 3 y Nº 4
Figura 4-17: Deformaciones obtenidas numéricamente en las galgas Nº 5 y Nº 6
Figura 4-18: Deformaciones obtenidas numéricamente en las galgas Nº 7 y Nº 8
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual 0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual 0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual
0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual 0
1
2
3
4
5
-800 -600 -400 -200 0
Car
ga (K
N)
Microdeformación
Numérico McCarthy
Numérico actual
Galga Nº 7 Galga Nº 8
Galga Nº 6 Galga Nº 5
Galga Nº 4 Galga Nº 3
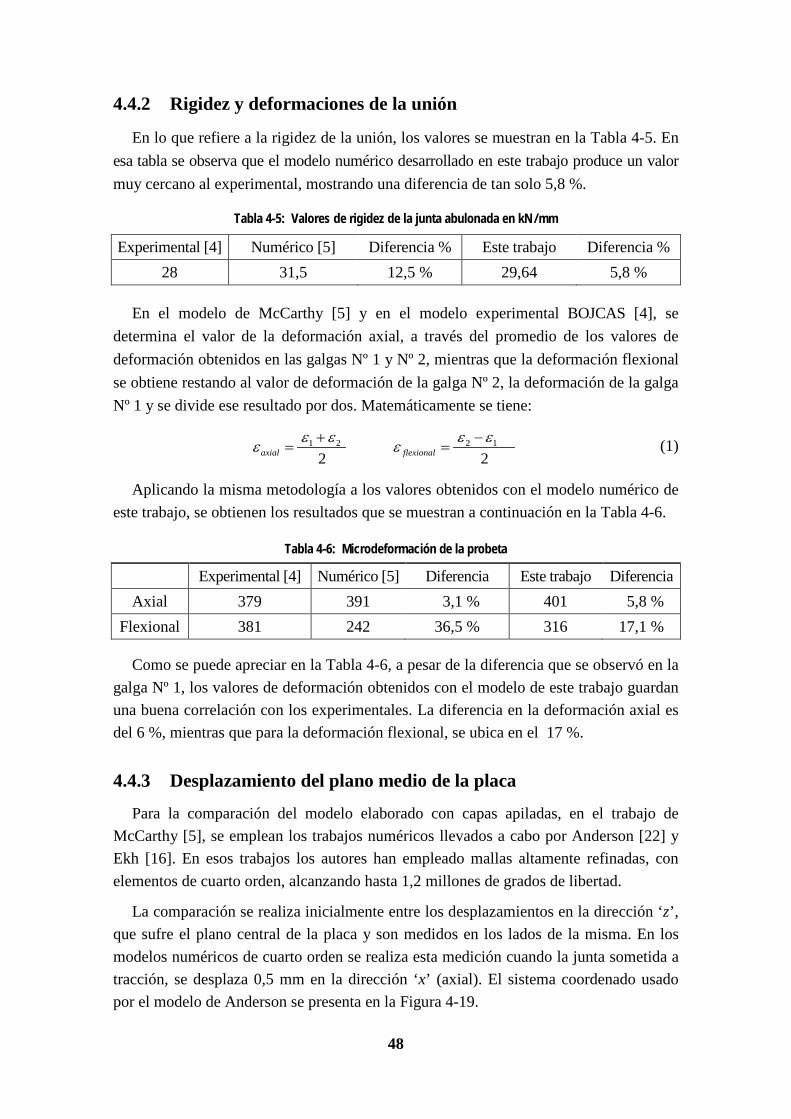
48
4.4.2 Rigidez y deformaciones de la unión
En lo que refiere a la rigidez de la unión, los valores se muestran en la Tabla 4-5. En esa tabla se observa que el modelo numérico desarrollado en este trabajo produce un valor muy cercano al experimental, mostrando una diferencia de tan solo 5,8 %.
Tabla 4-5: Valores de rigidez de la junta abulonada en kN / mm
Experimental [4] Numérico [5] Diferencia % Este trabajo Diferencia % 28 31,5 12,5 % 29,64 5,8 %
En el modelo de McCarthy [5] y en el modelo experimental BOJCAS [4], se determina el valor de la deformación axial, a través del promedio de los valores de deformación obtenidos en las galgas Nº 1 y Nº 2, mientras que la deformación flexional se obtiene restando al valor de deformación de la galga Nº 2, la deformación de la galga Nº 1 y se divide ese resultado por dos. Matemáticamente se tiene:
1 2 2 1
2 2+ −
= =axial flexionalε ε ε εε ε (1)
Aplicando la misma metodología a los valores obtenidos con el modelo numérico de este trabajo, se obtienen los resultados que se muestran a continuación en la Tabla 4-6.
Tabla 4-6: Microdeformación de la probeta
Experimental [4] Numérico [5] Diferencia Este trabajo Diferencia Axial 379 391 3,1 % 401 5,8 %
Flexional 381 242 36,5 % 316 17,1 %
Como se puede apreciar en la Tabla 4-6, a pesar de la diferencia que se observó en la galga Nº 1, los valores de deformación obtenidos con el modelo de este trabajo guardan una buena correlación con los experimentales. La diferencia en la deformación axial es del 6 %, mientras que para la deformación flexional, se ubica en el 17 %.
4.4.3 Desplazamiento del plano medio de la placa
Para la comparación del modelo elaborado con capas apiladas, en el trabajo de McCarthy [5], se emplean los trabajos numéricos llevados a cabo por Anderson [22] y Ekh [16]. En esos trabajos los autores han empleado mallas altamente refinadas, con elementos de cuarto orden, alcanzando hasta 1,2 millones de grados de libertad.
La comparación se realiza inicialmente entre los desplazamientos en la dirección ‘z’, que sufre el plano central de la placa y son medidos en los lados de la misma. En los modelos numéricos de cuarto orden se realiza esta medición cuando la junta sometida a tracción, se desplaza 0,5 mm en la dirección ‘x’ (axial). El sistema coordenado usado por el modelo de Anderson se presenta en la Figura 4-19.
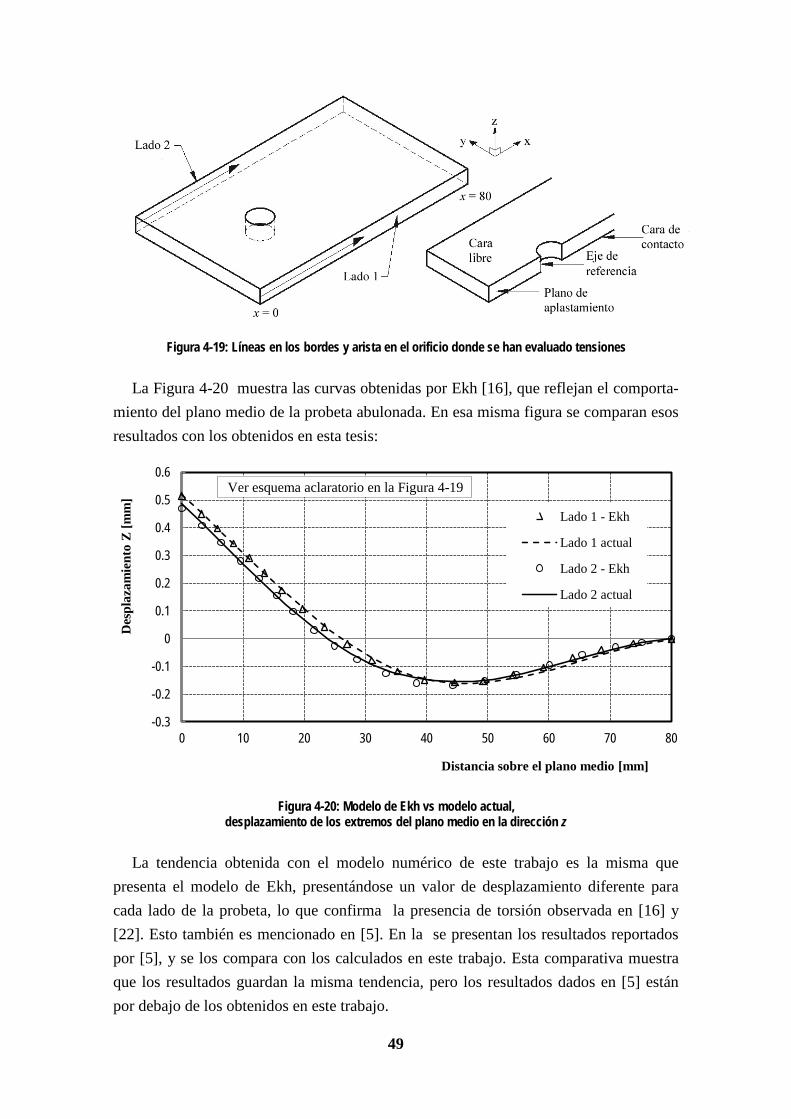
49
Figura 4-19: Líneas en los bordes y arista en el orificio donde se han evaluado tensiones
La Figura 4-20 muestra las curvas obtenidas por Ekh [16], que reflejan el comporta-miento del plano medio de la probeta abulonada. En esa misma figura se comparan esos resultados con los obtenidos en esta tesis:
Figura 4-20: Modelo de Ekh vs modelo actual,
desplazamiento de los extremos del plano medio en la dirección z
La tendencia obtenida con el modelo numérico de este trabajo es la misma que presenta el modelo de Ekh, presentándose un valor de desplazamiento diferente para cada lado de la probeta, lo que confirma la presencia de torsión observada en [16] y [22]. Esto también es mencionado en [5]. En la se presentan los resultados reportados por [5], y se los compara con los calculados en este trabajo. Esta comparativa muestra que los resultados guardan la misma tendencia, pero los resultados dados en [5] están por debajo de los obtenidos en este trabajo.
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 10 20 30 40 50 60 70 80
Des
plaz
amie
nto
Z [m
m]
Distancia sobre el plano medio [mm]
Lado 1 - Ekh
Lado 1 actual
Lado 2 - Ekh
Lado 2 actual
Ver esquema aclaratorio en la Figura 4-19
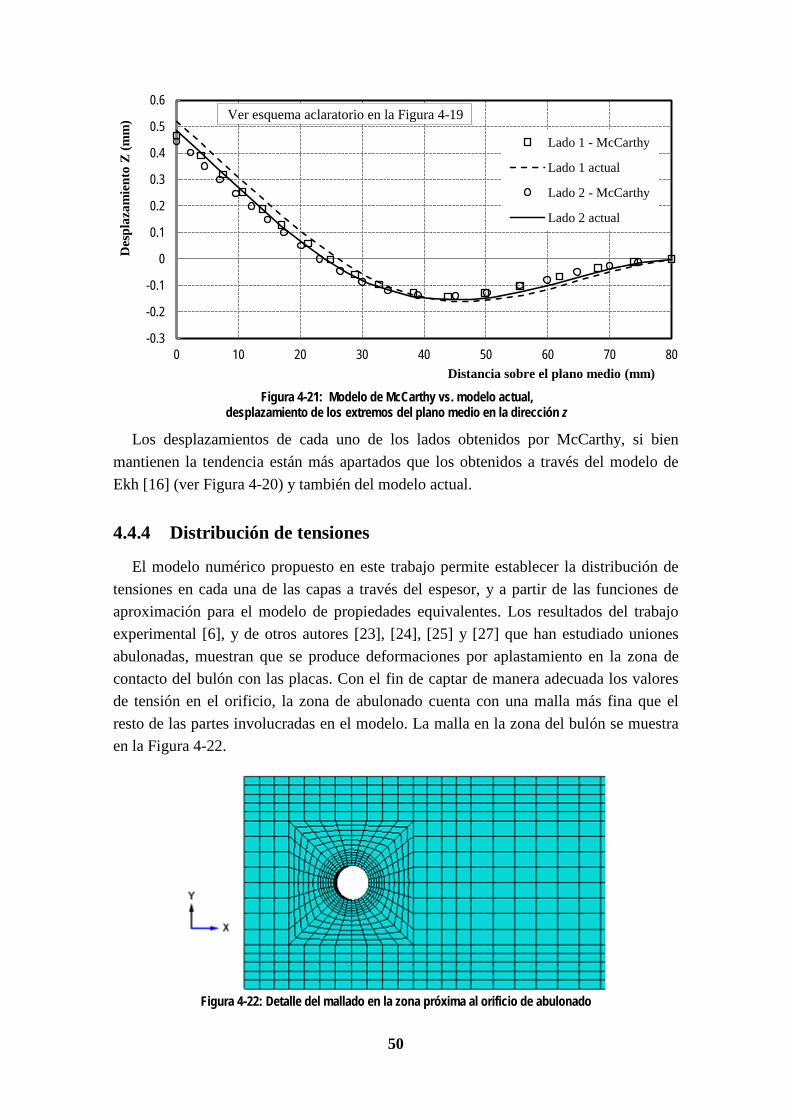
50
Los desplazamientos de cada uno de los lados obtenidos por McCarthy, si bien mantienen la tendencia están más apartados que los obtenidos a través del modelo de Ekh [16] (ver Figura 4-20) y también del modelo actual.
4.4.4 Distribución de tensiones
El modelo numérico propuesto en este trabajo permite establecer la distribución de tensiones en cada una de las capas a través del espesor, y a partir de las funciones de aproximación para el modelo de propiedades equivalentes. Los resultados del trabajo experimental [6], y de otros autores [23], [24], [25] y [27] que han estudiado uniones abulonadas, muestran que se produce deformaciones por aplastamiento en la zona de contacto del bulón con las placas. Con el fin de captar de manera adecuada los valores de tensión en el orificio, la zona de abulonado cuenta con una malla más fina que el resto de las partes involucradas en el modelo. La malla en la zona del bulón se muestra en la Figura 4-22.
Figura 4-22: Detalle del mallado en la zona próxima al orificio de abulonado
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 10 20 30 40 50 60 70 80
Des
plaz
amie
nto
Z (m
m)
Distancia sobre el plano medio (mm)
Lado 1 - McCarthy
Lado 1 actual
Lado 2 - McCarthy
Lado 2 actual
Figura 4-21: Modelo de McCarthy vs. modelo actual, desplazamiento de los extremos del plano medio en la dirección z
Ver esquema aclaratorio en la Figura 4-19
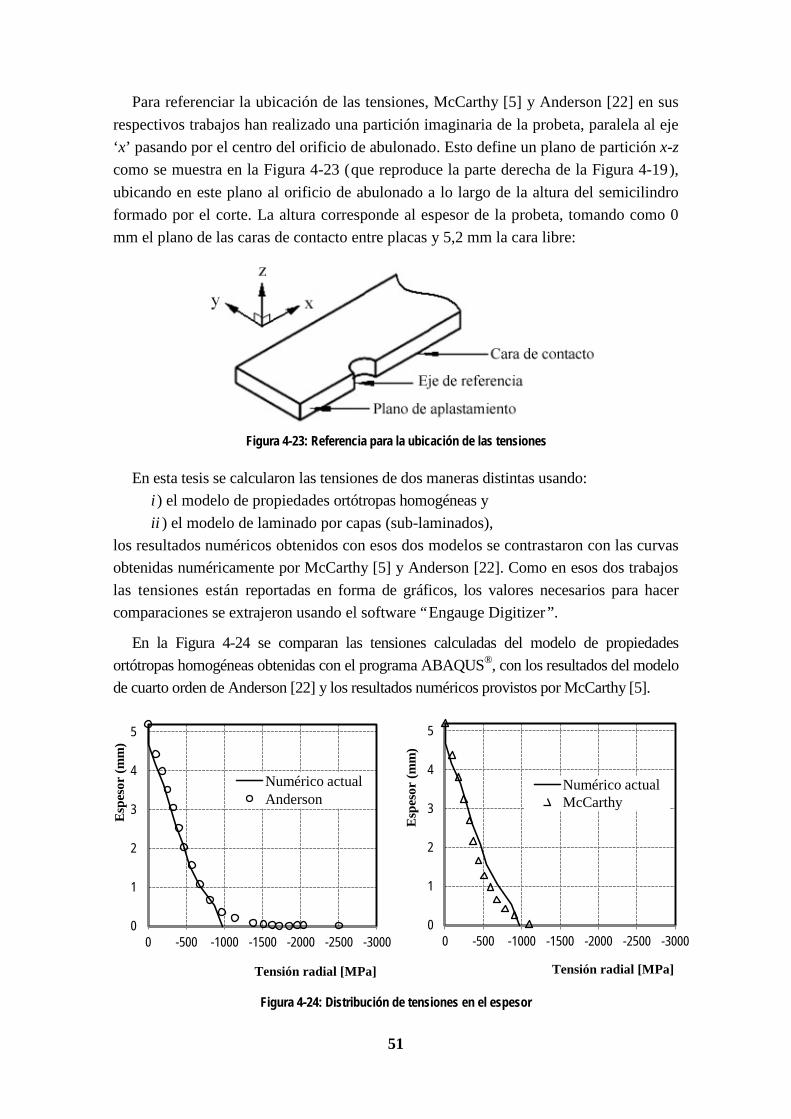
51
Para referenciar la ubicación de las tensiones, McCarthy [5] y Anderson [22] en sus respectivos trabajos han realizado una partición imaginaria de la probeta, paralela al eje ‘x’ pasando por el centro del orificio de abulonado. Esto define un plano de partición x-z como se muestra en la Figura 4-23 (que reproduce la parte derecha de la Figura 4-19), ubicando en este plano al orificio de abulonado a lo largo de la altura del semicilindro formado por el corte. La altura corresponde al espesor de la probeta, tomando como 0 mm el plano de las caras de contacto entre placas y 5,2 mm la cara libre:
Figura 4-23: Referencia para la ubicación de las tensiones
En esta tesis se calcularon las tensiones de dos maneras distintas usando: i ) el modelo de propiedades ortótropas homogéneas y ii ) el modelo de laminado por capas (sub-laminados),
los resultados numéricos obtenidos con esos dos modelos se contrastaron con las curvas obtenidas numéricamente por McCarthy [5] y Anderson [22]. Como en esos dos trabajos las tensiones están reportadas en forma de gráficos, los valores necesarios para hacer comparaciones se extrajeron usando el software “Engauge Digitizer”.
En la Figura 4-24 se comparan las tensiones calculadas del modelo de propiedades ortótropas homogéneas obtenidas con el programa ABAQUS®, con los resultados del modelo de cuarto orden de Anderson [22] y los resultados numéricos provistos por McCarthy [5].
Figura 4-24: Distribución de tensiones en el espesor
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
Numérico actual Anderson
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
Numérico actual McCarthy
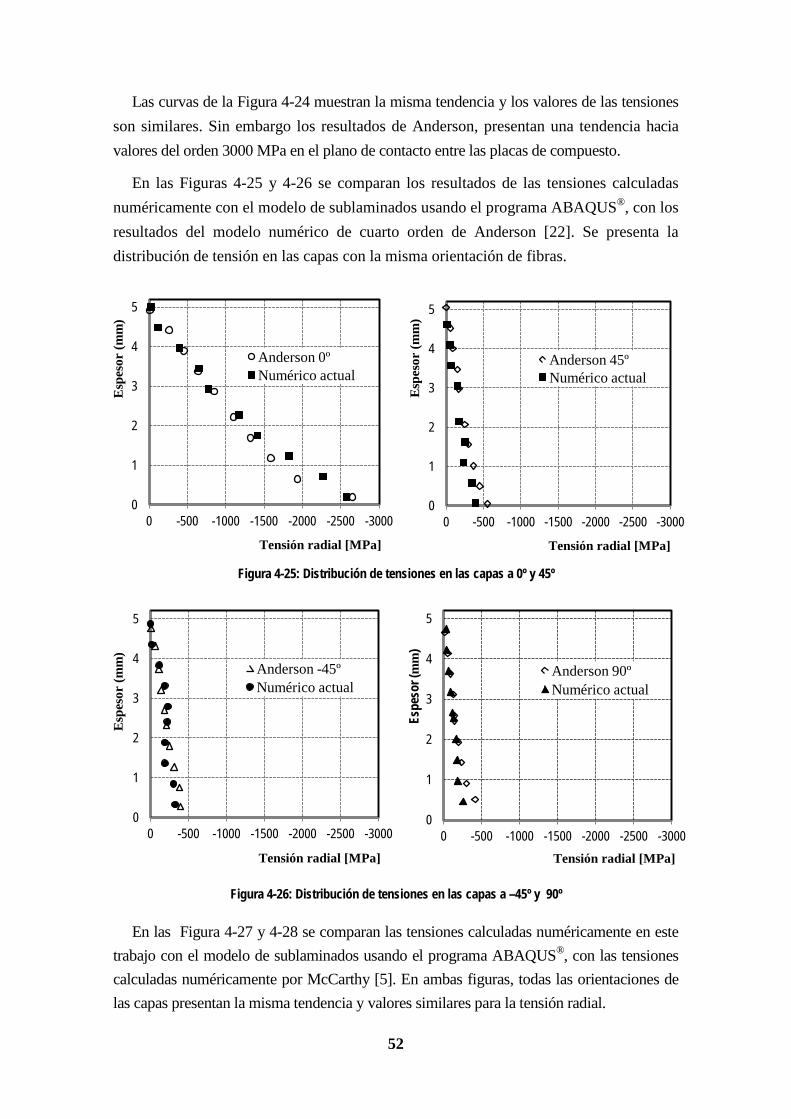
52
Las curvas de la Figura 4-24 muestran la misma tendencia y los valores de las tensiones son similares. Sin embargo los resultados de Anderson, presentan una tendencia hacia valores del orden 3000 MPa en el plano de contacto entre las placas de compuesto.
En las Figuras 4-25 y 4-26 se comparan los resultados de las tensiones calculadas numéricamente con el modelo de sublaminados usando el programa ABAQUS®, con los resultados del modelo numérico de cuarto orden de Anderson [22]. Se presenta la distribución de tensión en las capas con la misma orientación de fibras.
Figura 4-25: Distribución de tensiones en las capas a 0º y 45º
Figura 4-26: Distribución de tensiones en las capas a –45º y 90º
En las Figura 4-27 y 4-28 se comparan las tensiones calculadas numéricamente en este trabajo con el modelo de sublaminados usando el programa ABAQUS®, con las tensiones calculadas numéricamente por McCarthy [5]. En ambas figuras, todas las orientaciones de las capas presentan la misma tendencia y valores similares para la tensión radial.
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
Anderson 0º Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
Anderson 45º Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
Anderson -45º Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Espe
sor (
mm
)
Tensión radial [MPa]
Anderson 90º Numérico actual
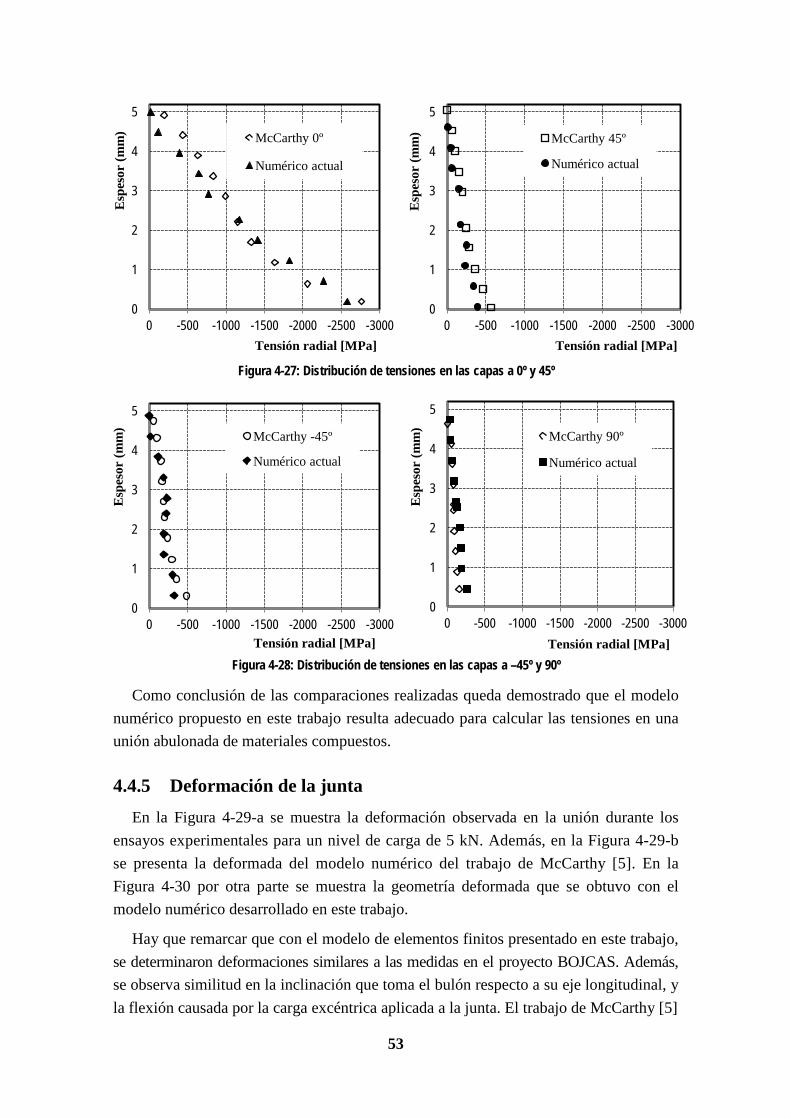
53
Figura 4-27: Distribución de tensiones en las capas a 0º y 45º
Figura 4-28: Distribución de tensiones en las capas a –45º y 90º
Como conclusión de las comparaciones realizadas queda demostrado que el modelo numérico propuesto en este trabajo resulta adecuado para calcular las tensiones en una unión abulonada de materiales compuestos.
4.4.5 Deformación de la junta En la Figura 4-29-a se muestra la deformación observada en la unión durante los
ensayos experimentales para un nivel de carga de 5 kN. Además, en la Figura 4-29-b se presenta la deformada del modelo numérico del trabajo de McCarthy [5]. En la Figura 4-30 por otra parte se muestra la geometría deformada que se obtuvo con el modelo numérico desarrollado en este trabajo.
Hay que remarcar que con el modelo de elementos finitos presentado en este trabajo, se determinaron deformaciones similares a las medidas en el proyecto BOJCAS. Además, se observa similitud en la inclinación que toma el bulón respecto a su eje longitudinal, y la flexión causada por la carga excéntrica aplicada a la junta. El trabajo de McCarthy [5]
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
McCarthy 0º
Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
McCarthy 45º
Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
McCarthy -45º
Numérico actual
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión radial [MPa]
McCarthy 90º
Numérico actual
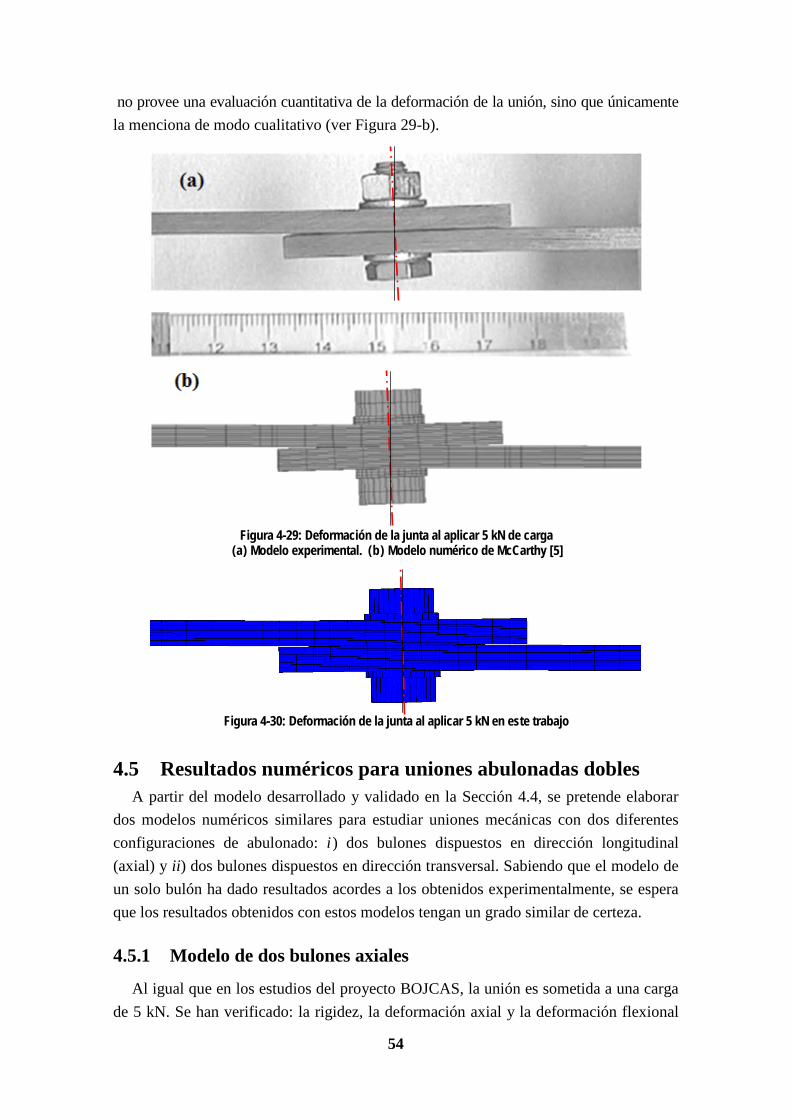
54
no provee una evaluación cuantitativa de la deformación de la unión, sino que únicamente la menciona de modo cualitativo (ver Figura 29-b).
Figura 4-29: Deformación de la junta al aplicar 5 kN de carga (a) Modelo experimental. (b) Modelo numérico de McCarthy [5]
Figura 4-30: Deformación de la junta al aplicar 5 kN en este trabajo
4.5 Resultados numéricos para uniones abulonadas dobles A partir del modelo desarrollado y validado en la Sección 4.4, se pretende elaborar
dos modelos numéricos similares para estudiar uniones mecánicas con dos diferentes configuraciones de abulonado: i) dos bulones dispuestos en dirección longitudinal (axial) y ii) dos bulones dispuestos en dirección transversal. Sabiendo que el modelo de un solo bulón ha dado resultados acordes a los obtenidos experimentalmente, se espera que los resultados obtenidos con estos modelos tengan un grado similar de certeza.
4.5.1 Modelo de dos bulones axiales
Al igual que en los estudios del proyecto BOJCAS, la unión es sometida a una carga de 5 kN. Se han verificado: la rigidez, la deformación axial y la deformación flexional
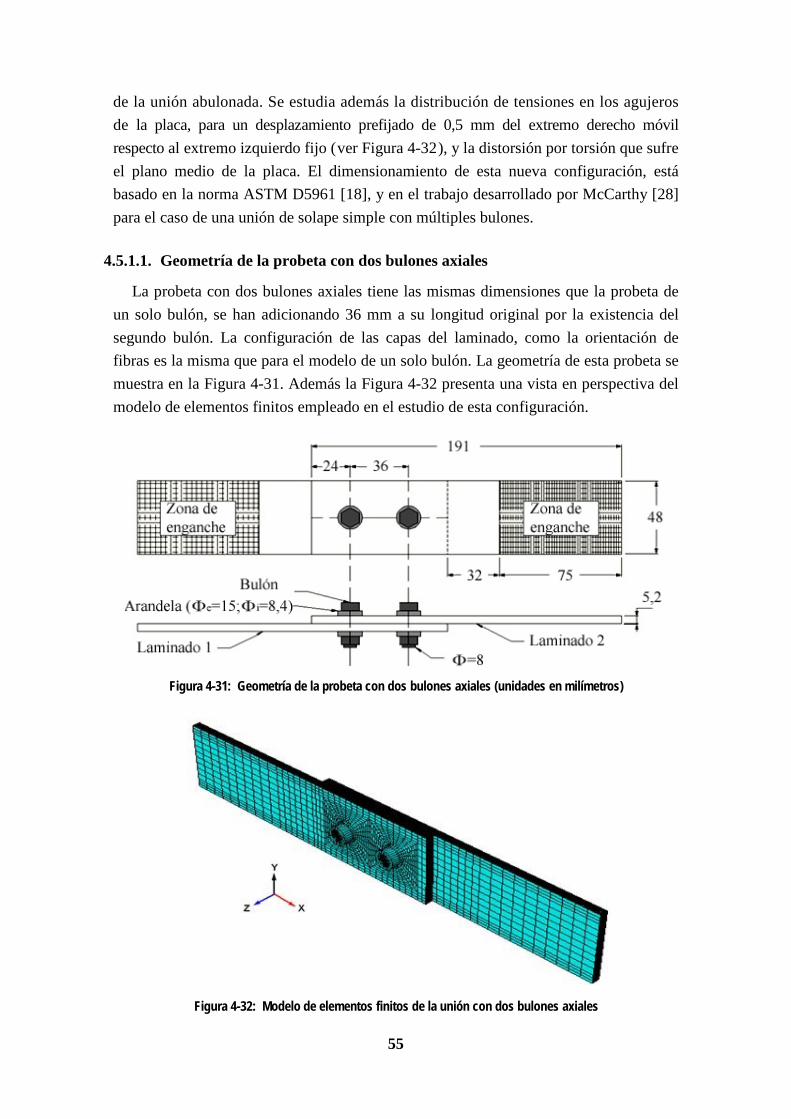
55
de la unión abulonada. Se estudia además la distribución de tensiones en los agujeros de la placa, para un desplazamiento prefijado de 0,5 mm del extremo derecho móvil respecto al extremo izquierdo fijo (ver Figura 4-32), y la distorsión por torsión que sufre el plano medio de la placa. El dimensionamiento de esta nueva configuración, está basado en la norma ASTM D5961 [18], y en el trabajo desarrollado por McCarthy [28] para el caso de una unión de solape simple con múltiples bulones.
4.5.1.1. Geometría de la probeta con dos bulones axiales
La probeta con dos bulones axiales tiene las mismas dimensiones que la probeta de un solo bulón, se han adicionando 36 mm a su longitud original por la existencia del segundo bulón. La configuración de las capas del laminado, como la orientación de fibras es la misma que para el modelo de un solo bulón. La geometría de esta probeta se muestra en la Figura 4-31. Además la Figura 4-32 presenta una vista en perspectiva del modelo de elementos finitos empleado en el estudio de esta configuración.
Figura 4-31: Geometría de la probeta con dos bulones axiales (unidades en milímetros)
Figura 4-32: Modelo de elementos finitos de la unión con dos bulones axiales
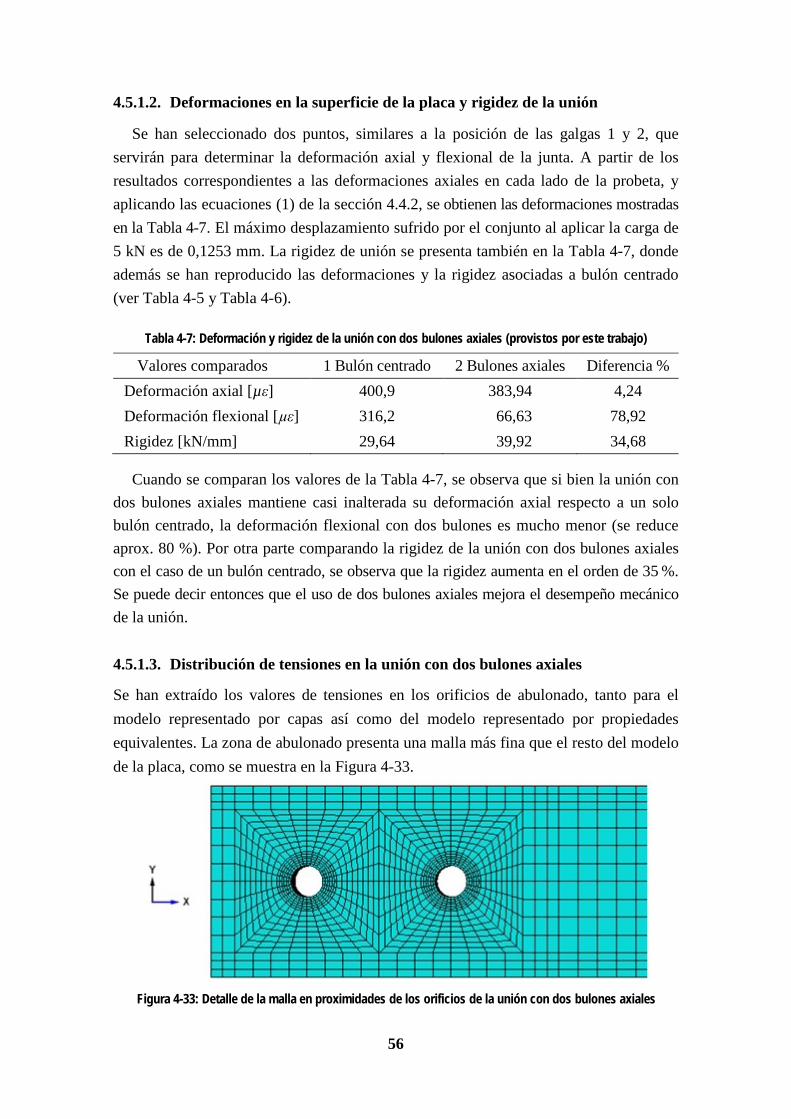
56
4.5.1.2. Deformaciones en la superficie de la placa y rigidez de la unión
Se han seleccionado dos puntos, similares a la posición de las galgas 1 y 2, que servirán para determinar la deformación axial y flexional de la junta. A partir de los resultados correspondientes a las deformaciones axiales en cada lado de la probeta, y aplicando las ecuaciones (1) de la sección 4.4.2, se obtienen las deformaciones mostradas en la Tabla 4-7. El máximo desplazamiento sufrido por el conjunto al aplicar la carga de 5 kN es de 0,1253 mm. La rigidez de unión se presenta también en la Tabla 4-7, donde además se han reproducido las deformaciones y la rigidez asociadas a bulón centrado (ver Tabla 4-5 y Tabla 4-6).
Tabla 4-7: Deformación y rigidez de la unión con dos bulones axiales (provistos por este trabajo)
Valores comparados 1 Bulón centrado 2 Bulones axiales Diferencia % Deformación axial [µε] 400,9 383,94 4,24 Deformación flexional [µε] 316,2 66,63 78,92 Rigidez [kN/mm] 29,64 39,92 34,68
Cuando se comparan los valores de la Tabla 4-7, se observa que si bien la unión con dos bulones axiales mantiene casi inalterada su deformación axial respecto a un solo bulón centrado, la deformación flexional con dos bulones es mucho menor (se reduce aprox. 80 %). Por otra parte comparando la rigidez de la unión con dos bulones axiales con el caso de un bulón centrado, se observa que la rigidez aumenta en el orden de 35 %. Se puede decir entonces que el uso de dos bulones axiales mejora el desempeño mecánico de la unión.
4.5.1.3. Distribución de tensiones en la unión con dos bulones axiales
Se han extraído los valores de tensiones en los orificios de abulonado, tanto para el modelo representado por capas así como del modelo representado por propiedades equivalentes. La zona de abulonado presenta una malla más fina que el resto del modelo de la placa, como se muestra en la Figura 4-33.
Figura 4-33: Detalle de la malla en proximidades de los orificios de la unión con dos bulones axiales
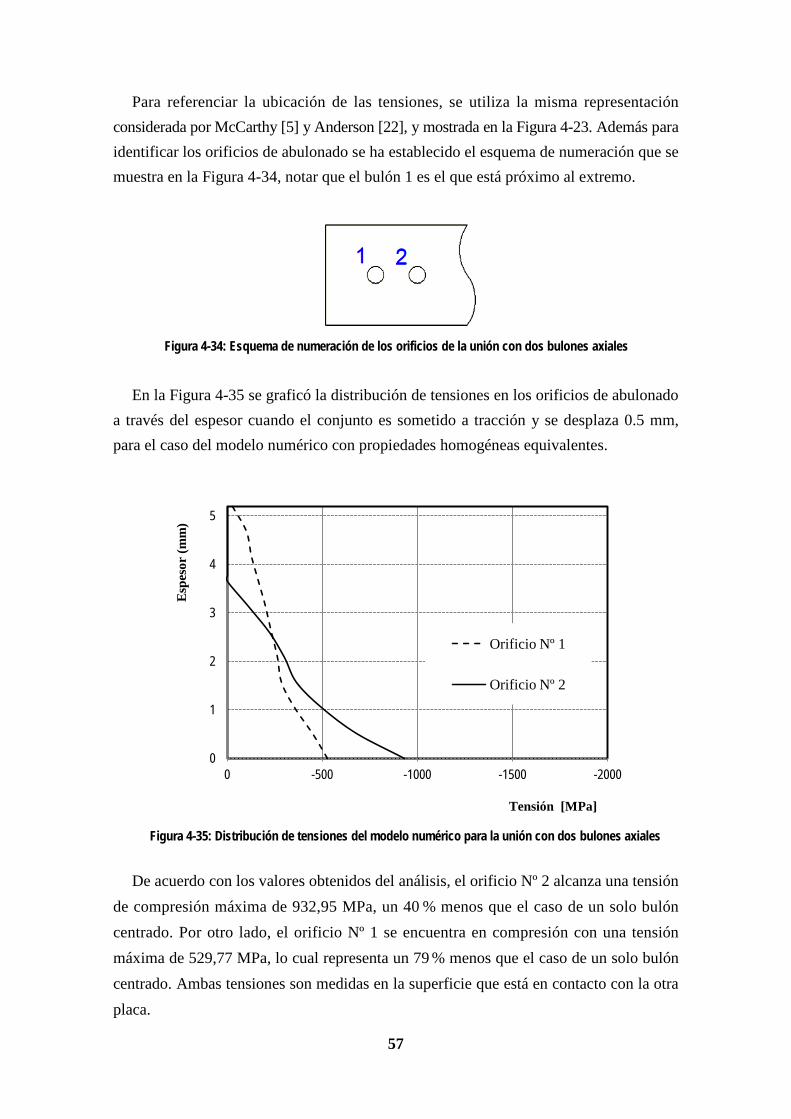
57
Para referenciar la ubicación de las tensiones, se utiliza la misma representación considerada por McCarthy [5] y Anderson [22], y mostrada en la Figura 4-23. Además para identificar los orificios de abulonado se ha establecido el esquema de numeración que se muestra en la Figura 4-34, notar que el bulón 1 es el que está próximo al extremo.
Figura 4-34: Esquema de numeración de los orificios de la unión con dos bulones axiales
En la Figura 4-35 se graficó la distribución de tensiones en los orificios de abulonado a través del espesor cuando el conjunto es sometido a tracción y se desplaza 0.5 mm, para el caso del modelo numérico con propiedades homogéneas equivalentes.
De acuerdo con los valores obtenidos del análisis, el orificio Nº 2 alcanza una tensión de compresión máxima de 932,95 MPa, un 40 % menos que el caso de un solo bulón centrado. Por otro lado, el orificio Nº 1 se encuentra en compresión con una tensión máxima de 529,77 MPa, lo cual representa un 79 % menos que el caso de un solo bulón centrado. Ambas tensiones son medidas en la superficie que está en contacto con la otra placa.
0
1
2
3
4
5
-2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión [MPa]
Orificio Nº 1
Orificio Nº 2
Figura 4-35: Distribución de tensiones del modelo numérico para la unión con dos bulones axiales
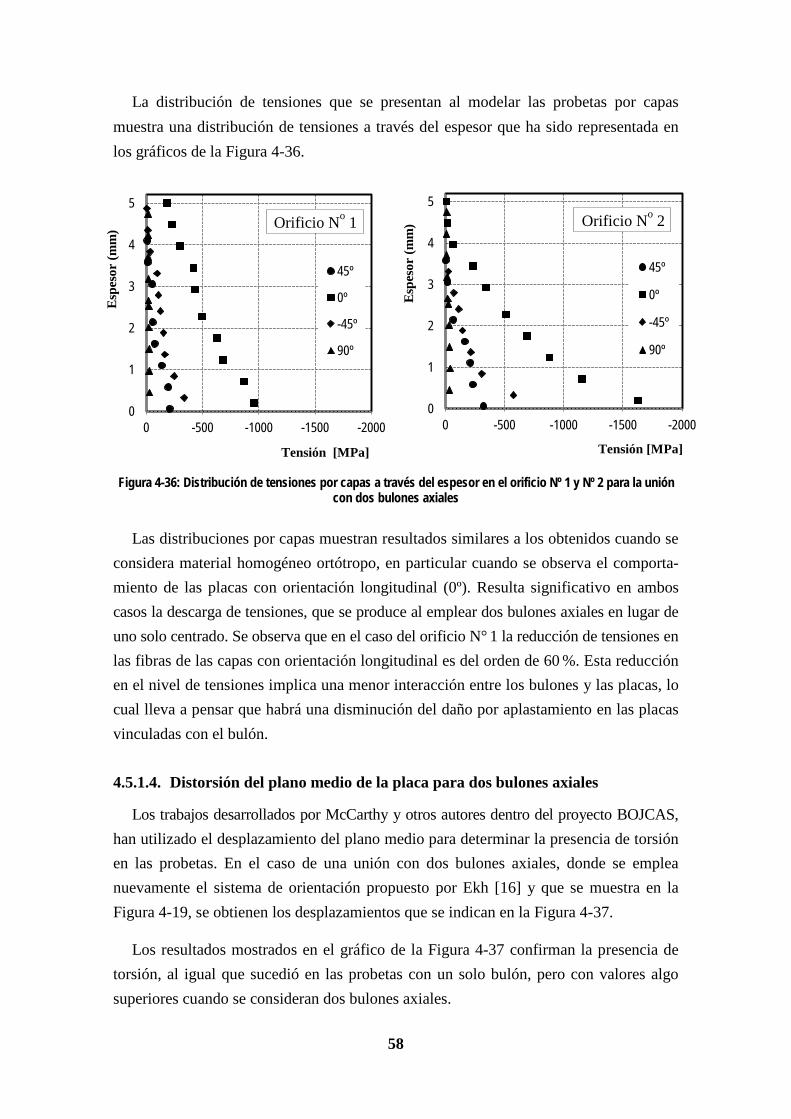
58
La distribución de tensiones que se presentan al modelar las probetas por capas muestra una distribución de tensiones a través del espesor que ha sido representada en los gráficos de la Figura 4-36.
Figura 4-36: Distribución de tensiones por capas a través del espesor en el orificio Nº 1 y Nº 2 para la unión con dos bulones axiales
Las distribuciones por capas muestran resultados similares a los obtenidos cuando se considera material homogéneo ortótropo, en particular cuando se observa el comporta-miento de las placas con orientación longitudinal (0º). Resulta significativo en ambos casos la descarga de tensiones, que se produce al emplear dos bulones axiales en lugar de uno solo centrado. Se observa que en el caso del orificio N° 1 la reducción de tensiones en las fibras de las capas con orientación longitudinal es del orden de 60 %. Esta reducción en el nivel de tensiones implica una menor interacción entre los bulones y las placas, lo cual lleva a pensar que habrá una disminución del daño por aplastamiento en las placas vinculadas con el bulón.
4.5.1.4. Distorsión del plano medio de la placa para dos bulones axiales
Los trabajos desarrollados por McCarthy y otros autores dentro del proyecto BOJCAS, han utilizado el desplazamiento del plano medio para determinar la presencia de torsión en las probetas. En el caso de una unión con dos bulones axiales, donde se emplea nuevamente el sistema de orientación propuesto por Ekh [16] y que se muestra en la Figura 4-19, se obtienen los desplazamientos que se indican en la Figura 4-37.
Los resultados mostrados en el gráfico de la Figura 4-37 confirman la presencia de torsión, al igual que sucedió en las probetas con un solo bulón, pero con valores algo superiores cuando se consideran dos bulones axiales.
0
1
2
3
4
5
-2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión [MPa]
45º
0º
-45º
90º
0
1
2
3
4
5
-2000 -1500 -1000 -500 0 E
spes
or (m
m)
Tensión [MPa]
45º
0º
-45º
90º
Orificio No 1 Orificio No 2
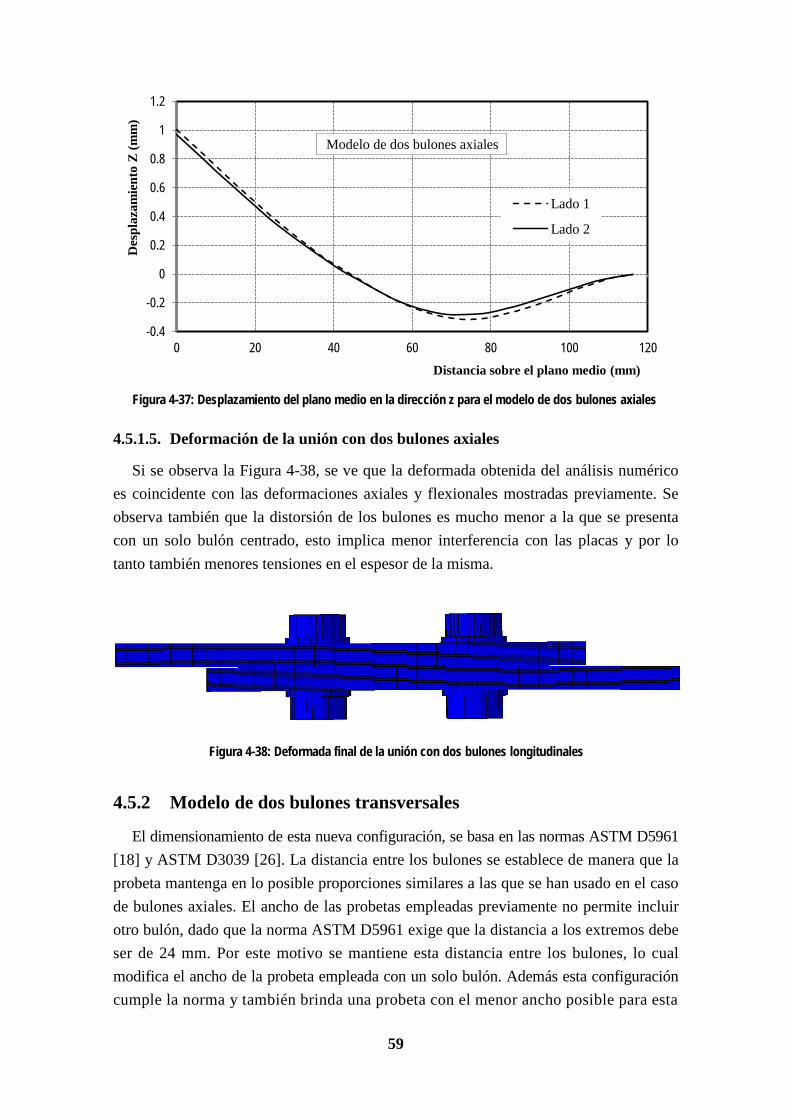
59
4.5.1.5. Deformación de la unión con dos bulones axiales
Si se observa la Figura 4-38, se ve que la deformada obtenida del análisis numérico es coincidente con las deformaciones axiales y flexionales mostradas previamente. Se observa también que la distorsión de los bulones es mucho menor a la que se presenta con un solo bulón centrado, esto implica menor interferencia con las placas y por lo tanto también menores tensiones en el espesor de la misma.
Figura 4-38: Deformada final de la unión con dos bulones longitudinales
4.5.2 Modelo de dos bulones transversales
El dimensionamiento de esta nueva configuración, se basa en las normas ASTM D5961 [18] y ASTM D3039 [26]. La distancia entre los bulones se establece de manera que la probeta mantenga en lo posible proporciones similares a las que se han usado en el caso de bulones axiales. El ancho de las probetas empleadas previamente no permite incluir otro bulón, dado que la norma ASTM D5961 exige que la distancia a los extremos debe ser de 24 mm. Por este motivo se mantiene esta distancia entre los bulones, lo cual modifica el ancho de la probeta empleada con un solo bulón. Además esta configuración cumple la norma y también brinda una probeta con el menor ancho posible para esta
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120
Des
plaz
amie
nto
Z (m
m)
Distancia sobre el plano medio (mm)
Lado 1
Lado 2
Figura 4-37: Desplazamiento del plano medio en la dirección z para el modelo de dos bulones axiales
Modelo de dos bulones axiales
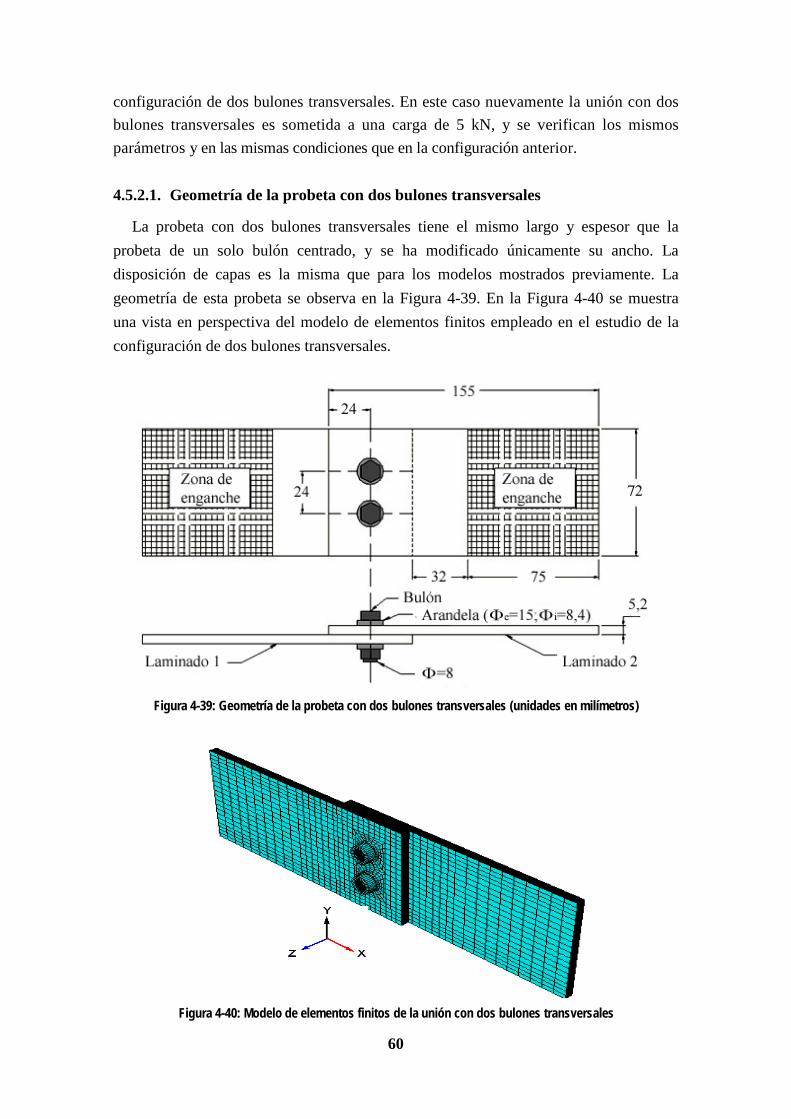
60
configuración de dos bulones transversales. En este caso nuevamente la unión con dos bulones transversales es sometida a una carga de 5 kN, y se verifican los mismos parámetros y en las mismas condiciones que en la configuración anterior.
4.5.2.1. Geometría de la probeta con dos bulones transversales
La probeta con dos bulones transversales tiene el mismo largo y espesor que la probeta de un solo bulón centrado, y se ha modificado únicamente su ancho. La disposición de capas es la misma que para los modelos mostrados previamente. La geometría de esta probeta se observa en la Figura 4-39. En la Figura 4-40 se muestra una vista en perspectiva del modelo de elementos finitos empleado en el estudio de la configuración de dos bulones transversales.
Figura 4-39: Geometría de la probeta con dos bulones transversales (unidades en milímetros)
Figura 4-40: Modelo de elementos finitos de la unión con dos bulones transversales
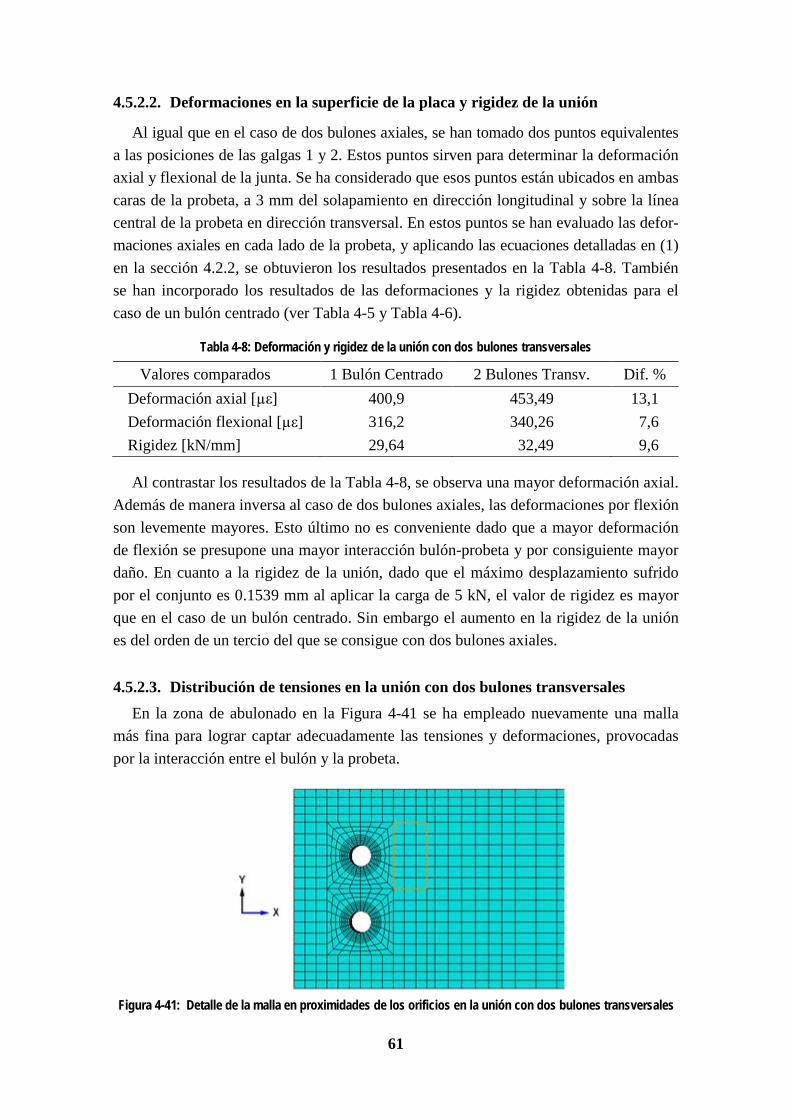
61
4.5.2.2. Deformaciones en la superficie de la placa y rigidez de la unión
Al igual que en el caso de dos bulones axiales, se han tomado dos puntos equivalentes a las posiciones de las galgas 1 y 2. Estos puntos sirven para determinar la deformación axial y flexional de la junta. Se ha considerado que esos puntos están ubicados en ambas caras de la probeta, a 3 mm del solapamiento en dirección longitudinal y sobre la línea central de la probeta en dirección transversal. En estos puntos se han evaluado las defor-maciones axiales en cada lado de la probeta, y aplicando las ecuaciones detalladas en (1) en la sección 4.2.2, se obtuvieron los resultados presentados en la Tabla 4-8. También se han incorporado los resultados de las deformaciones y la rigidez obtenidas para el caso de un bulón centrado (ver Tabla 4-5 y Tabla 4-6).
Tabla 4-8: Deformación y rigidez de la unión con dos bulones transversales
Valores comparados 1 Bulón Centrado 2 Bulones Transv. Dif. % Deformación axial [µε] 400,9 453,49 13,1 Deformación flexional [µε] 316,2 340,26 7,6 Rigidez [kN/mm] 29,64 32,49 9,6
Al contrastar los resultados de la Tabla 4-8, se observa una mayor deformación axial. Además de manera inversa al caso de dos bulones axiales, las deformaciones por flexión son levemente mayores. Esto último no es conveniente dado que a mayor deformación de flexión se presupone una mayor interacción bulón-probeta y por consiguiente mayor daño. En cuanto a la rigidez de la unión, dado que el máximo desplazamiento sufrido por el conjunto es 0.1539 mm al aplicar la carga de 5 kN, el valor de rigidez es mayor que en el caso de un bulón centrado. Sin embargo el aumento en la rigidez de la unión es del orden de un tercio del que se consigue con dos bulones axiales.
4.5.2.3. Distribución de tensiones en la unión con dos bulones transversales En la zona de abulonado en la Figura 4-41 se ha empleado nuevamente una malla
más fina para lograr captar adecuadamente las tensiones y deformaciones, provocadas por la interacción entre el bulón y la probeta.
Figura 4-41: Detalle de la malla en proximidades de los orificios en la unión con dos bulones transversales
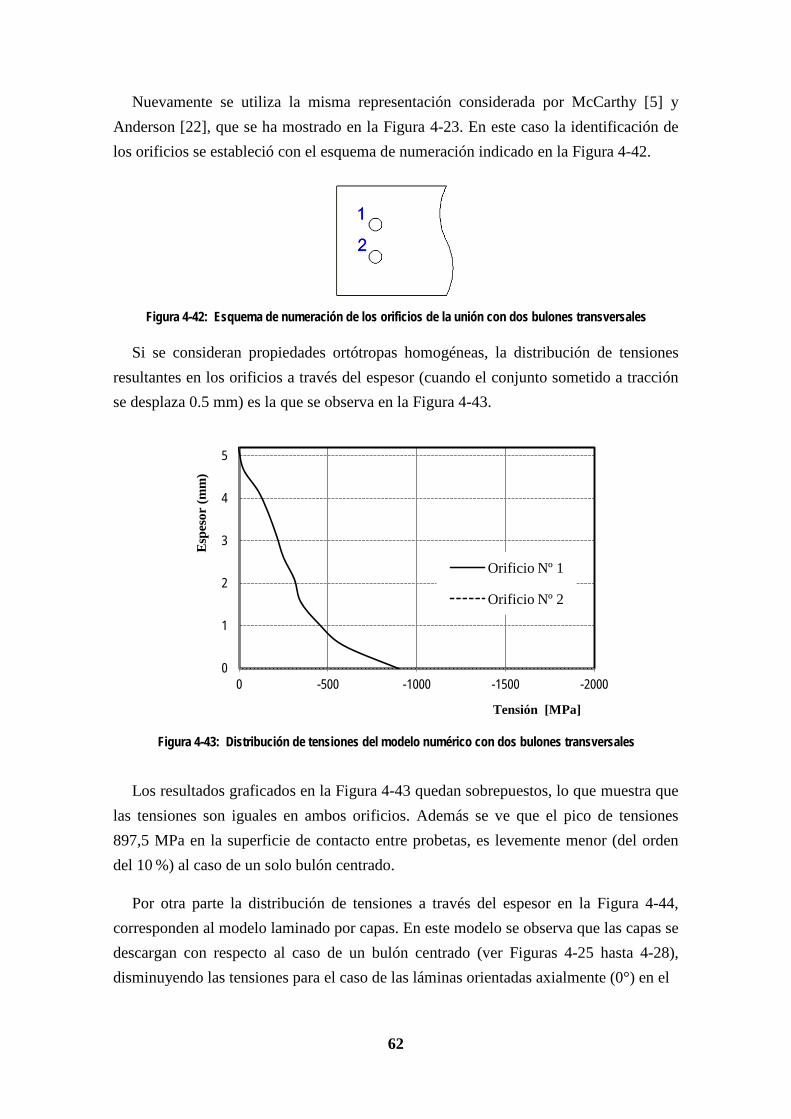
62
Nuevamente se utiliza la misma representación considerada por McCarthy [5] y Anderson [22], que se ha mostrado en la Figura 4-23. En este caso la identificación de los orificios se estableció con el esquema de numeración indicado en la Figura 4-42.
Figura 4-42: Esquema de numeración de los orificios de la unión con dos bulones transversales
Si se consideran propiedades ortótropas homogéneas, la distribución de tensiones resultantes en los orificios a través del espesor (cuando el conjunto sometido a tracción se desplaza 0.5 mm) es la que se observa en la Figura 4-43.
Figura 4-43: Distribución de tensiones del modelo numérico con dos bulones transversales
Los resultados graficados en la Figura 4-43 quedan sobrepuestos, lo que muestra que las tensiones son iguales en ambos orificios. Además se ve que el pico de tensiones 897,5 MPa en la superficie de contacto entre probetas, es levemente menor (del orden del 10 %) al caso de un solo bulón centrado.
Por otra parte la distribución de tensiones a través del espesor en la Figura 4-44, corresponden al modelo laminado por capas. En este modelo se observa que las capas se descargan con respecto al caso de un bulón centrado (ver Figuras 4-25 hasta 4-28), disminuyendo las tensiones para el caso de las láminas orientadas axialmente (0°) en el
0
1
2
3
4
5
-2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión [MPa]
Orificio Nº 1
Orificio Nº 2
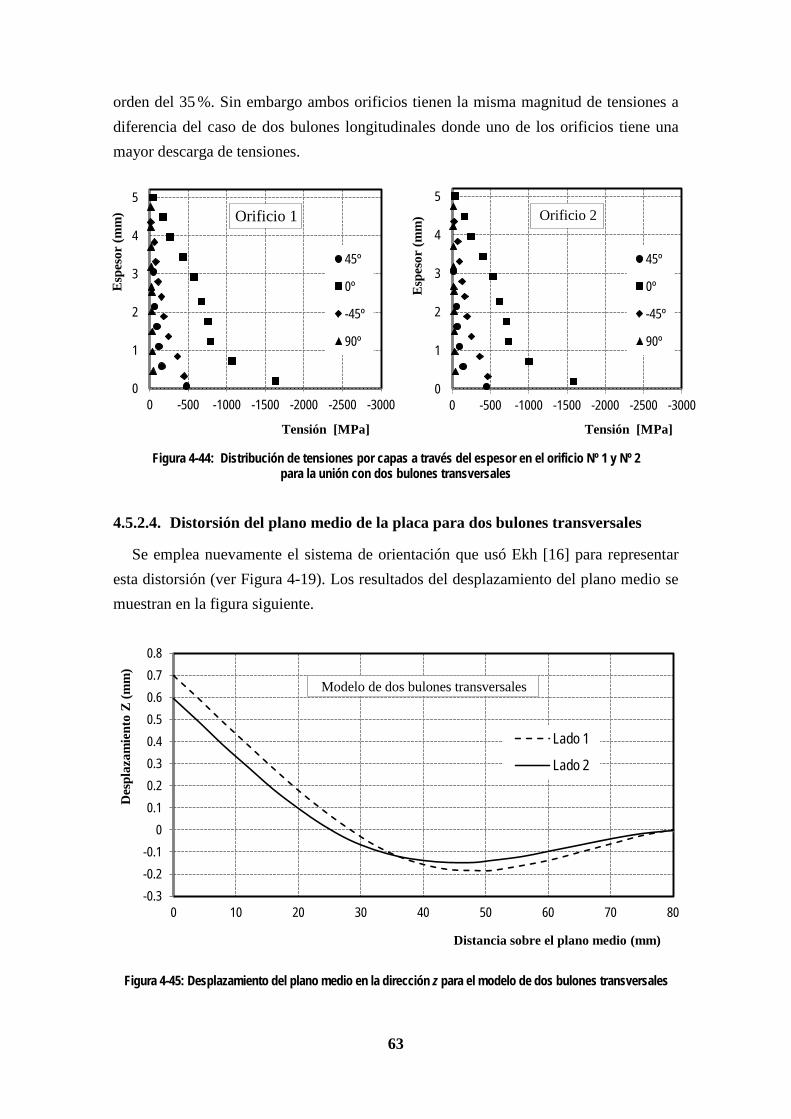
63
orden del 35 %. Sin embargo ambos orificios tienen la misma magnitud de tensiones a diferencia del caso de dos bulones longitudinales donde uno de los orificios tiene una mayor descarga de tensiones.
Figura 4-44: Distribución de tensiones por capas a través del espesor en el orificio Nº 1 y Nº 2 para la unión con dos bulones transversales
4.5.2.4. Distorsión del plano medio de la placa para dos bulones transversales
Se emplea nuevamente el sistema de orientación que usó Ekh [16] para representar esta distorsión (ver Figura 4-19). Los resultados del desplazamiento del plano medio se muestran en la figura siguiente.
Figura 4-45: Desplazamiento del plano medio en la dirección z para el modelo de dos bulones transversales
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0
Esp
esor
(mm
)
Tensión [MPa]
45º
0º
-45º
90º
0
1
2
3
4
5
-3000 -2500 -2000 -1500 -1000 -500 0 E
spes
or (m
m)
Tensión [MPa]
45º
0º
-45º
90º
-0.3 -0.2 -0.1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 10 20 30 40 50 60 70 80
Des
plaz
amie
nto
Z (m
m)
Distancia sobre el plano medio (mm)
Lado 1
Lado 2
Orificio 1 Orificio 2
Modelo de dos bulones transversales
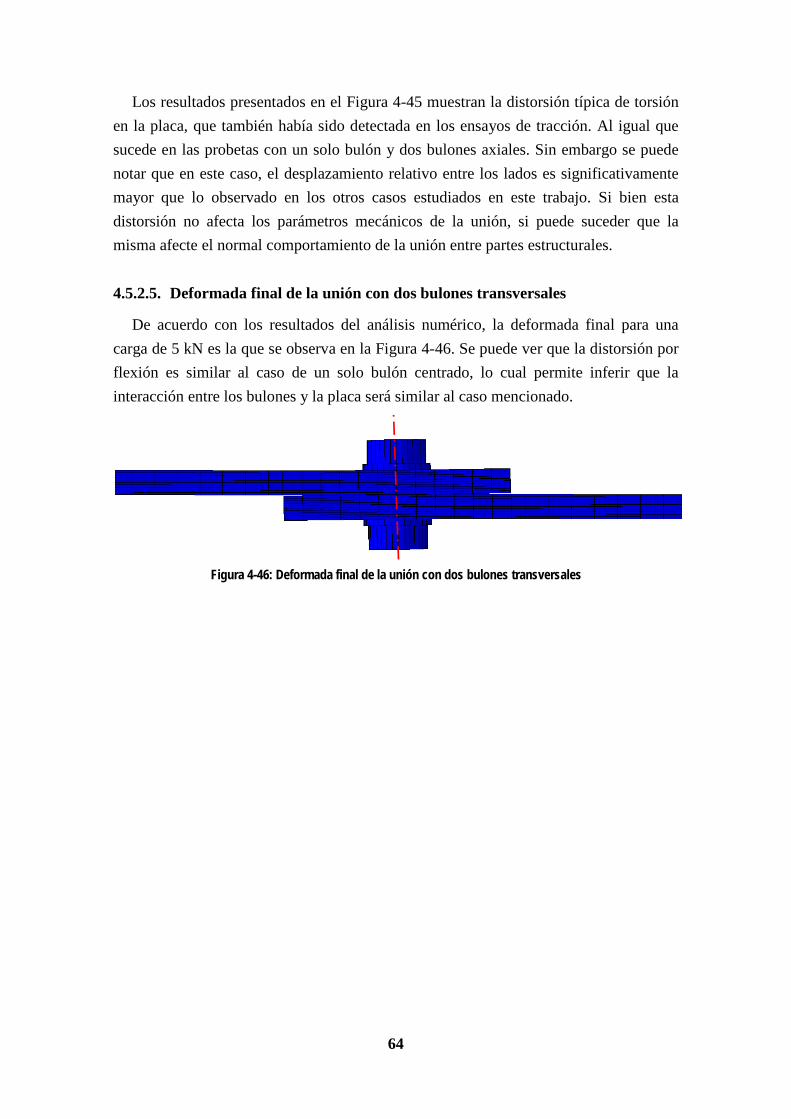
64
Los resultados presentados en el Figura 4-45 muestran la distorsión típica de torsión en la placa, que también había sido detectada en los ensayos de tracción. Al igual que sucede en las probetas con un solo bulón y dos bulones axiales. Sin embargo se puede notar que en este caso, el desplazamiento relativo entre los lados es significativamente mayor que lo observado en los otros casos estudiados en este trabajo. Si bien esta distorsión no afecta los parámetros mecánicos de la unión, si puede suceder que la misma afecte el normal comportamiento de la unión entre partes estructurales.
4.5.2.5. Deformada final de la unión con dos bulones transversales
De acuerdo con los resultados del análisis numérico, la deformada final para una carga de 5 kN es la que se observa en la Figura 4-46. Se puede ver que la distorsión por flexión es similar al caso de un solo bulón centrado, lo cual permite inferir que la interacción entre los bulones y la placa será similar al caso mencionado.
Figura 4-46: Deformada final de la unión con dos bulones transversales
65
CAPÍTULO 5
5 CONCLUSIONES
5.1 Introducción En este trabajo se han simulado computacionalmente diferentes configuraciones para
uniones abulonadas de elementos fabricados con materiales compuestos. La validación del modelo numérico propuesto se realizó a partir de los ensayos experimentales del Proyecto BOJCAS [4], que fue llevado a cabo en la Unión Europea. Además se han replicado los trabajos numéricos realizados por McCarthy y colab. [5], como parte del desarrollo de un modelo numérico eficiente y robusto. De esta manera se ha obtenido y validado un modelo adecuado para el análisis de uniones de materiales compuestos de solape simple vinculados por medio de bulones.
Las simulaciones requirieron estudiar los desarrollos realizados dentro de los trabajos mencionados e identificar:
• Los materiales utilizados.
• Las configuraciones del compuesto analizado.
• Las configuraciones de abulonado seleccionadas.
• El método de ensayo mecánico aplicado.
• Los resultados obtenidos experimentalmente.
• Los resultados obtenidos numéricamente.
• Las conclusiones a que se arribó.
En este trabajo se han expuesto los principales tópicos referidos al comportamiento mecánico de materiales compuestos que se relacionan directamente con el análisis realizado. Se han identificado las ecuaciones que modelan la relación tensión-deformación, así como la mejor metodología general de análisis para la probeta abulonada a través del método de elementos finitos.
Se enfrentó la complejidad de modelar el problema tridimensional, con el fin de poder captar fielmente las interacciones debido al contacto existente entre los componentes involucrados en el modelo. Para ello se realizó un análisis de las características de las placas bajo el concepto de sublaminado, obteniéndose resultados satisfactorios con el modelo propuesto en el presente trabajo que fueron contrastados con resultados de trabajos experimentales y numéricos de otros autores.
66
La buena concordancia observada al comparar los resultados de este trabajo con los resultados experimentales y numéricos reportados por BOJCAS [4], McCarthy y colab. [5], Anderson [22] y Ekh [16], permiten concluir que el modelo elaborado representa de una manera realista el comportamiento mecánico de las uniones abulonadas de materiales compuestos. Esa concordancia da un respaldo adecuado a la modelación numérica de otras configuraciones de abulonado y solapamiento, presentadas en esta tesis, basada en el modelo desarrollado en este trabajo para un abulonado simple.
5.2 Conclusiones El análisis de las uniones abulonadas de placas de materiales compuestos realizado
en este trabajo arrojó resultados convincentes, lo cual sugiere que es posible la simulación computacional de estas piezas que tienen un comportamiento complejo. En líneas generales las conclusiones de este trabajo son:
• La simulación computacional por elementos finitos del abulonado de placas de materiales compuestos, proporcionó resultados concordantes con los que se obtuvieron en los ensayos experimentales del proyecto BOJCAS. En particular en lo referente al comportamiento mecánico del conjunto, es decir se obtuvieron desplazamientos y deformaciones similares a los medidos experimentalmente y plena concordancia en el valor de la rigidez de la unión.
• La distribución de tensiones en el espesor, sobre la línea de bulones, obtenida numéricamente en este trabajo presenta similitudes importantes con los resultados numéricos reportados en la literatura para casos similares. Igual situación se repite con los desplazamientos del plano medio de las placas de compuesto.
• La selección de la aproximación por elementos finitos, empleando en el mallado de la geometría elementos tridimensionales, resulta en un todo de acuerdo con la naturaleza del problema. Los elementos que mejor se adaptan y captan de una forma eficiente los cambios bruscos en la distribución espacial de las tensiones, han sido los hexaedros cuadráticos de 20 nodos.
• La extensión del modelo, desarrollado para el análisis la unión simple de un bulón, al estudio del problema de dos bulones con diferentes configuraciones, mostró un comportamiento cuantitativamente equivalente a los resultados experimentales obtenidos por Morales y Quadri [6]. Además se reprodujeron adecuadamente los estados tensionales que producen el aplastamiento de las placas de material compuesto, lo que posteriormente provoca el daño observado por dichos autores.
67
• El estudio de configuraciones más generales de abulonado, muestra que las
configuraciones donde los elementos de unión están dispuestos en tándem (en la
dirección de carga) presentan mejores resultados. Particularmente, la ventaja de
esas configuraciones está asociada a la mejora de los parámetros principales de
la unión: rigidez, deformaciones globales y tensiones de aplastamiento en los
orificios.
• Los resultados obtenidos permiten concluir que el método de elementos finitos es
una potente herramienta para simular condiciones reales de trabajo en uniones
abulonadas de materiales compuestos. Se ha comprobado además que los
resultados obtenidos son bastante fiables, esto puede aprovecharse a los fines de
ahorrar tiempo y recursos en procesos industriales durante la fase de diseño de
uniones abulonadas.
5.3 Contribuciones del presente trabajo
A continuación se enumeran las principales contribuciones de este trabajo:
Se ha desarrollado una metodología para replicar situaciones reales de vinculación de piezas de materiales compuestos aplicando software comercial de elementos finitos. Lo importante de esta metodología, es que se han establecido los parámetros adecuados para que los resultados de la simulación sean acordes a la realidad del problema.
La complejidad del problema estudiado y los resultados precisos obtenidos, muestran que es posible emplear esta metodología en forma alternativa y/o complementaria a los ensayos experimentales a realizarse sobre uniones abulonadas de partes estructurales de compuesto. En función de esto se puede afirmar que los detalles de modelación que se presentan en esta tesis son un aporte importante para la industria.
La extensión del modelo propuesto a configuraciones más generales, a partir de la validación de la metodología de cálculo sobre un esquema simple de unión, ha permitido establecer que configuración de unión es la más adecuada.
Por último y a nivel personal, este trabajo brinda una excelente oportunidad para establecer nuevas líneas de investigación en el campo de los compuestos dentro del Área de Ciencias Aeronáuticas del Departamento de Seguridad y Defensa (Universidad de las Fuerzas Armadas) en Ecuador y en el Centro de Investigación y Desarrollo de la Fuerza Aérea Ecuatoriana.
68
5.4 Líneas de trabajos futuros
A partir del análisis numérico de una unión mediante bulones para placas de material compuestos presentado en estas tesis, es posible delinear algunas líneas futuras de trabajo como por ejemplo:
• Reemplazar la representación realizada a través de sólidos tridimensionales, desarrollada en el presente trabajo, por un modelo de lámina equivalente (con elementos de lámina planos), a fin de comparar los resultados obtenidos y verificar las diferencias que provee cada modelo.
• Extender el análisis numérico, desarrollado en el Proyecto BOJCAS y en esta tesis, a la unión de materiales compuestos con otras configuraciones de apilamiento, otros tipos de solapamiento y diferentes tipos de elementos de vinculación (remaches, pegado, etc.)
• Realizar trabajos simultáneos de experimentación y modelación numérica para el análisis del comportamiento mecánico de materiales compuestos empleando para ello distintos tipos de ensayos mecánicos, que simulen condiciones reales de operación de este tipo de materiales y comparar los resultados obtenidos con las simulaciones computacionales. Esto permitirá sin duda hacer aportes significativos a la industria para la solución de problemas reales en el diseño de estructuras de materiales compuestos.
• Analizar la influencia del torque aplicado por el bulón sobre las placas de material compuesto.
• Investigar cómo influye la interferencia (control de huelgos) en los orificios de abulonado, en las uniones abulonadas de materiales compuestos.
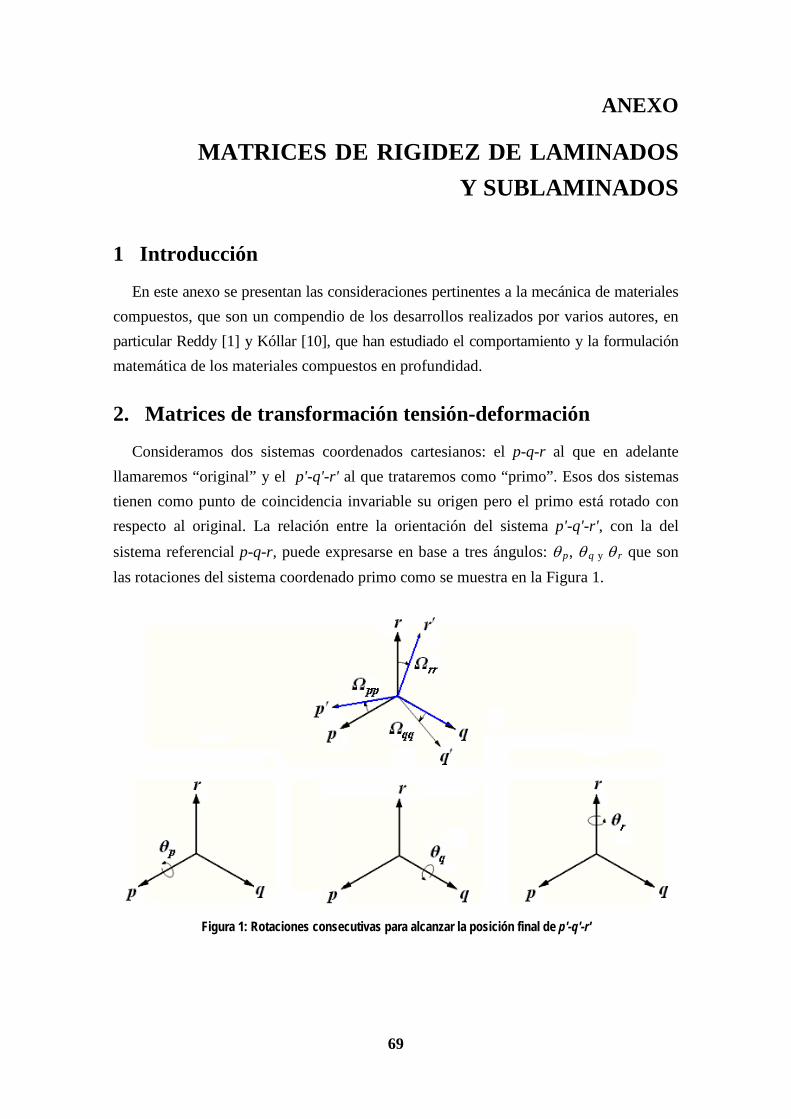
69
ANEXO
MATRICES DE RIGIDEZ DE LAMINADOS Y SUBLAMINADOS
1 Introducción
En este anexo se presentan las consideraciones pertinentes a la mecánica de materiales compuestos, que son un compendio de los desarrollos realizados por varios autores, en particular Reddy [1] y Kóllar [10], que han estudiado el comportamiento y la formulación matemática de los materiales compuestos en profundidad.
2. Matrices de transformación tensión-deformación
Consideramos dos sistemas coordenados cartesianos: el p-q-r al que en adelante llamaremos “original” y el p'-q'-r' al que trataremos como “primo”. Esos dos sistemas tienen como punto de coincidencia invariable su origen pero el primo está rotado con respecto al original. La relación entre la orientación del sistema p'-q'-r', con la del sistema referencial p-q-r, puede expresarse en base a tres ángulos: θ p, θ q y θ r que son las rotaciones del sistema coordenado primo como se muestra en la Figura 1.
Figura 1: Rotaciones consecutivas para alcanzar la posición final de p'-q'-r'
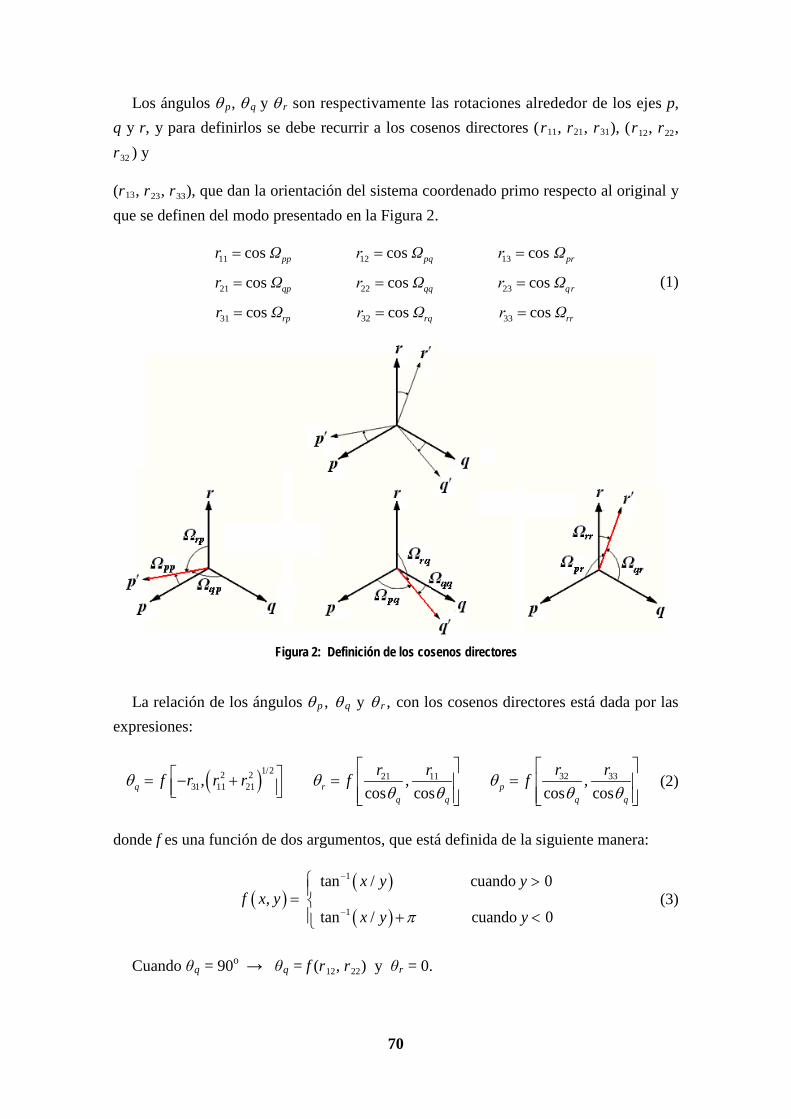
70
Los ángulos θ p, θ q y θ r son respectivamente las rotaciones alrededor de los ejes p, q y r, y para definirlos se debe recurrir a los cosenos directores (r11, r21, r31), (r12, r22, r32 ) y
(r13, r23, r33), que dan la orientación del sistema coordenado primo respecto al original y que se definen del modo presentado en la Figura 2.
11 12 13
21 22 23
31 32 33
cos cos cos
cos cos cos
cos cos cos
pp pq pr
qp qq qr
rp rq rr
r Ω r Ω r Ω
r Ω r Ω r Ω
r Ω r Ω r Ω
= = =
= = =
= = =
(1)
Figura 2: Definición de los cosenos directores
La relación de los ángulos θ p , θ q y θ r , con los cosenos directores está dada por las expresiones:
( )1/22 2 32 3321 1131 11 21, , ,
cos cos cos cosq r pq q q q
r rr rf r r r f fθ θ θθ θ θ θ
= − + = = (2)
donde f es una función de dos argumentos, que está definida de la siguiente manera:
( )( )
( )
1
1
tan / cuando 0,
tan / cuando 0
x y yf x y
x y yπ
−
−
>= + <
(3)
Cuando θq = 90o → θq = f (r12, r22) y θr = 0.

71
2.1 Transformación de tensiones
Las tensiones en el sistema coordenado primo, son calculadas a partir de las tensiones en el sistema coordenado original, empleando para ello la transformación:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
p
q
r
qr
pr
pq
T T T T T TT T T T T TT T T T T TT T T T T TT T T T T TT T T T T T
σ σ σ σ σ σ
σ σ σ σ σ σ
σ σ σ σ σ σ
σ σ σ σ σ σ
σ σ σ σ σ σ
σ σ σ σ σ σ
σσστττ
=
′
′
′′
′
′
p
q
r
qr
pr
pq
σσστττ
→
=′ σTσ σ (4)
En la ecuación (4), la matriz de transformación σT puede ser expresada como:
p q rσ σ σ σT = T T T (5)
siendo:
2 2
2 2
2 2
1 0 0 0 0 00 cos sen 2sen cos 0 00 sen cos 2sen cos 0 00 sen cos sen cos cos sen 0 00 0 0 0 cos sen0 0 0 0 sin cos
p p p p
p p p p
p p p p p p
p p
p p
θ θ θ θθ θ θ θ
θ θ θ θ θ θθ θθ θ
− = − − −
σpT (6)
2 2
2 2
2 2
cos 0 sen 0 2sen cos 00 1 0 0 0 0
sen 0 cos 0 2sen cos 00 0 0 cos 0 sen
sen cos 0 sen cos 0 cos sen 00 0 0 sen 0 cos
q q q q
q q q q
q q
q q q q q q
q q
θ θ θ θ
θ θ θ θθ θ
θ θ θ θ θ θθ θ
− = − − −
qσT (7)
2 2
2 2
2 2
cos sen 0 0 0 2 sen cossen cos 0 0 0 2sen cos
0 0 1 0 0 00 0 0 cos sen 00 0 0 sen cos 0
sen cos sen cos 0 0 0 cos sen
r r r r
r r r r
r r
r r
r r r r r r
θ θ θ θθ θ θ θ
θ θθ θ
θ θ θ θ θ θ
−
= −
− −
rσT (8)
Dado que en el presente trabajo estamos interesados en una rotación del sistema primo alrededor del eje r, donde se mantienen coincidentes r y r', se establece que los

72
ángulos θp y θq son nulos. De esta forma pσT y q
σT se convierten en matrices identidad,
y la matriz rσT resulta igual a σT .
En el caso de sistemas cartesianos bidimensionales p-q y p'-q', la relación entre las tensiones en el sistema primo y el sistema original esta dado por:
2 2
2 2
2 2
' cos sen 2 sen cos' sen cos 2sen cos
sen cos sen cos cos sen'
p pr r r r
q r r r r q
r r r r r rpq pq
σ θ θ θ θσ θ θ θ θ
θ θ θ θ ττ
σ
θ θσ
= − − −
(9)
2.2 Transformación de deformaciones
Similarmente a lo mostrado previamente, la deformación en el sistema coordenado primo con respecto al sistema coordenado original está dado por:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
''''''
p
q
r
qr
pr
pq
T T T T T TT T T T T TT T T T T TT T T T T TT T T T T TT T T T T T
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
ε ε ε
εε ε
εεεγγγ
=
p
q
r
qr
pr
pq
γγγ
εεε
′→
εε = T ε (10)
En la ecuación (10) el vector ε representa las deformaciones ingenieriles. La matriz
εT que se aplica a este tipo de transformaciones, que es distinta de σT , puede ser
expresada como: p q r
ε ε εεT = T T T (11)
siendo estas matrices:
2 2
2 2
2 2
1 0 0 0 0 00 cos sen sen cos 0 00 sen cos sen cos 0 00 2sen cos 2sen cos cos sen 0 00 0 0 0 cos sen0 0 0 0 sen cos
p p p p
p p p p
p p p p p p
p p
p p
θ θ θ θθ θ θ θ
θ θ θ θ θ θθ θθ θ
− = − − −
pεT (12)
2 2
2 2
2 2
cos 0 sen 0 sen cos 00 1 0 0 0 0
sen 0 cos 0 sen cos 00 0 0 cos 0 sen
2sen cos 0 2sen cos 0 cos sen 00 0 0 sen 0 cos
q q q q
q q q q
q q
q q q q q q
q q
θ θ θ θ
θ θ θ θθ θ
θ θ θ θ θ θθ θ
− = − − −
qεT (13)

73
2 2
2 2
2 2
cos sen 0 0 0 sen cossen cos 0 0 0 sen cos
0 0 1 0 0 00 0 0 cos sen 00 0 0 sen cos 0
2sen cos 2sen cos 0 0 0 cos sen
r r r r
r r r r
r r
r r
r r r r r r
θ θ θ θθ θ θ θ
θ θθ θ
θ θ θ θ θ θ
− =
− − −
rεT (14)
Al igual que en la matriz de transformación de tensiones, el giro alrededor del eje r
hace que las matrices pεT y q
εT sean iguales a la matriz identidad, y rεT sea igual a εT .
Este hecho al ser aplicado a un caso bidimensional da lugar a:
2 2
2 2
2 2
' cos sen sen cos' sen cos sen cos' 2sen cos 2sen cos cos sen
p r r r r p
q r r r r q
pq r r r r r r pq
ε θ θ θ θε θ θ θ θ εγ θ θ θ θ θ θ γ
ε = −
− −
(15)
3 Condición de tensión plana Una de las principales suposiciones para el análisis mecánico de placas laminadas de
materiales compuestos, es la condición de tensión plana bajo la cual se asume que las tensiones normales y las tensiones de corte fuera del plano son nulas. Considerando que la dirección z es normal a la placa de compuesto, se tiene:
000
z
xz
yz
σττ
===
(16)
La condición dada en (16) aproxima adecuadamente las tensiones de una placa delgada de materiales compuestos laminados cuando las fibras son paralelas al plano x-y y la placa se carga a lo largo de sus extremos. De este modo las fuerzas resultan paralelas a dicho plano y se distribuyen uniformemente en el espesor. Si bien esta suposición no provee las tensiones exactas en la placa, sirve para obtener valores con una precisión aceptable. En virtud de esto, la relación deformación-tensión, mostrada en la ecuación (5) del Capítulo 2 referida al sistema coordenado x-y-z es:
11 12 16
22 26
36
x x
y y
xy xys
S S SS S
im S
σστ
εεγ
=
(17)
Invirtiendo la ecuación (17) se obtiene la matriz de rigidez Q que está dada por:

74
11 12 16
22 26
66
x x
y y
xy xy
Q Q QQ Q
sim Q
σσ
εεγτ
=
(18)
Esta relación se adapta a la condición que presenta el material, y de acuerdo a la orientación de sus fibras puede ser tratado como monoclínico, ortótropo, transver-samente isótropo o completamente isótropo. En esta tesis se trabaja con un material ortótropo, lo cual conlleva a que los elementos S16 y S26 de la matriz de flexibilidad S sean nulos. Entonces la matriz de flexibilidad tiene la siguiente forma:
1/ 0
1/ 0
1
/
/
ν −
=
x y
xy
xx
y
E
E
sim G
E
S (19)
Luego, expresando los elementos de la matriz de rigidez Q en términos de las constantes ingenieriles se tiene:
/ / 0
/ 0
ν −
=
x xy x
y
xy
E D E D
E D
sim G
Q (20)
donde 21 1yxy xy yx
x
ED
Eν ν ν= − = −
Con la ecuación (20) se puede obtener la matriz de rigidez, para una capa de material laminado de fibras unidireccionales que están alineadas con el eje x. A partir de esta, y mediante el uso de las matrices de transformación, se puede determinar la matriz de rigidez para otras capas cuya orientación de fibras no esté alineada con el eje x.
Las relaciones tensión-deformación en los sistemas coordenados original y primo definidos anteriormente, están dadas por:
=
′ ′ ′=
σ Q ε
σ Q ε (21)
Multiplicando a la primera de las relaciones descritas en (21) por la matriz de
transformación de tensiones σT resulta:
′
=σ σσ
T σ T Q ε (22)

75
Para que en la ecuación (22) el vector de tensiones en el sistema coordenado primo ′σ esté relacionado con el vector de deformaciones ′ε en el mismo sistema, es necesario
introducir la relación descrita en (10). Entonces se multiplica por ( −1ε εT T ), que resulta
en la matriz identidad y permite llegar al objetivo buscado:
−
′ ′
′ = 1ε
Q
σ εε
σ T QT T ε
(23)
A partir de esta relación se deduce que la matriz de rigidez en el sistema coordenado primo está dada por: −′ = 1
σ εQ T Q T (24)
Si tenemos un compuesto laminado de varias capas y un sistema de coordenadas global x-y-z, cada capa tiene un sistema cartesiano propio x'-y'-z' donde sus fibras están alineadas en la dirección longitudinal del eje x'. De modo que para referirlas al sistema global del compuesto deberemos usar la ecuación (24) invertida de modo que:
− ′= 1σ εQ T Q T (25)
En el caso de un material compuesto laminado conformado por varias capas del mismo material, la matriz ′Q es igual en todos las capas y corresponde a la inclinación de 0º de las fibras respecto al eje x'. Mientras que la matriz Q tiene en cuenta la orientación de las fibras mediante la asociación de su ángulo de inclinación, algo que está incluido en las matrices de transformación.
Para ejemplificar, se considera un compuesto de fibra de carbono unidireccional HTA/6376 formado por una capa orientada a 0º y una a 45º con las propiedades mecánicas descritas en la Tabla 2-1 del Capítulo 2. La matriz de flexibilidad para la capa orientada a 0º, es decir en el sistema asociado a la dirección longitudinal de la fibra resulta:
2
9
1 0,3 0140 140
1 m0 1 010 N
15, 2
sim
−
−
=
S x (26)
Invirtiendo esta relación se tiene:
92
140,91 3,02 0N10,07 0 1 0m
5,20sim
′ =
Q x (27)

76
Utilizando la ecuación (25) la fibra alineada a 0º llevada al sistema global tiene una matriz de transformación:
o
2 2
2 20
2 2
cos sen 2sen 0 cos 0 0
sen cos 2sen 0 cos 0 0
sen 0 cos 0 sen 0 cos 0 cos sen
0 0 1 0
0 0 0
0 0
1
0 0 1
−
− −
= − = − −
1
1 1
σT (28)
o
2 2
2 20
2 2
cos sen sen 0 cos 0 0
sen cos sen 0 cos 0 0
2sen 0 cos 0 2sen 0 cos 0 cos sen
0 0 1 0
0 0 0 1
0 0 10 0
= − = − −
εT (29)
1 0 1 00 1 0 1
1
0 00 0
10 0 0 0
− ′ ′= = ⇒ =
0 0
1
Q Q Q Q (30)
Para la fibra alineada a 45º se tiene:
o
2 2
2 245
2 2
cos sen 2sen cos 1
sen cos 2sen cos 1
sen cos sen cos cos
45 45 45 45 0,5 0,5
45 45 45 45 0,5 0,5
45 45 45 45 45 45s 0en 0, 05 ,5
−−
= − = − − − −
-1
1 1
σT (31)
o
2 2
2 245
2 2
cos sen sen cos
sen cos sen cos
2sen cos 2se
45 45 45 45 0,5 0,5 0,5
45 45 45 45 0,5 0,5 0,5
45 45 45 4n cos cos sen 15 45 45 1 0
= − = − − − −
εT (32)
o9
245
0,5 0,5 0,5 0,5 0,51 140,91 3,02 0N1 10,07 00,5 0,5 0,5 0,5 0,5
0,5 0 1
1 0m
0,5 5 0 1 0,2sim
−
= − − − −
1
Q x (33)
o9
245
44,45 34,05 32,71N44,45 32,71 1 0m
36,23sim
=
Q x (34)
A partir de las ecuaciones mostradas previamente es posible determinar las matrices de rigidez A, B y D de un compuesto laminado, como se muestra en el Capítulo 2 del presente trabajo en las ecuaciones (25) y (26).

77
4 Obtención de la matriz de flexibilidad de sublaminados Los sublaminados son divisiones que se realizan al laminado, para facilitar el análisis
por elementos finitos usando mallas de elementos tridimensionales. Para esto, se emplea la relación entre las deformaciones y las tensiones según la ecuación (5) del Capítulo 2 que debe ser cumplida por el sublaminado. Trasladando esta expresión a un sistema coordenado x-y-z, utilizando S para referirse a la matriz de flexibilidad del sublaminado, y denotando deformaciones y tensiones promedios mediante , , yε γ σ τ tenemos:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
x x
y y
z z
yz yz
xz xz
xy xy
S S S S S SS S S S S SS S S S S SS S S S S SS S S S S SS S S S S S
σσστττ
εεεγγγ
=
(35)
En el presente desarrollo hay que tener en cuenta que las relaciones (3) y (4) del Capítulo 3, mostradas a continuación, que se refieren a las tensiones y deformaciones promedio:
x
y
xy
1 1
1 1
1 1
s
s
s
x x z zhs s
y y xz xzhs s
xy xy yz yzhs s
dz Nh h
dz Nh h
dz Nh h
σ σ σ σ
σ σ τ τ
τ τ τ τ
= = =
= = =
= = =
∫
∫
∫
(36)
1
1
1
ε ε ε ε
ε εγ γ
γ γ γ γ
= =
= =
= =
∫
∫
∫
s
s
s
yz yz
xz xz
z z x xhs
y y
xy x
s
sy
h
h
dzh
dzh
dzh
(37)
4.1 Elementos de la matriz S debido a tensiones en el plano
Para obtener los elementos de la matriz S es necesario imponer la condición de que las tensiones fuera del plano , ,σ τ τz xz yz sean nulas como se muestra en la Figura 3. De
este modo la ecuación (35) se puede escribir como se muestra en (38), (39) y (40).
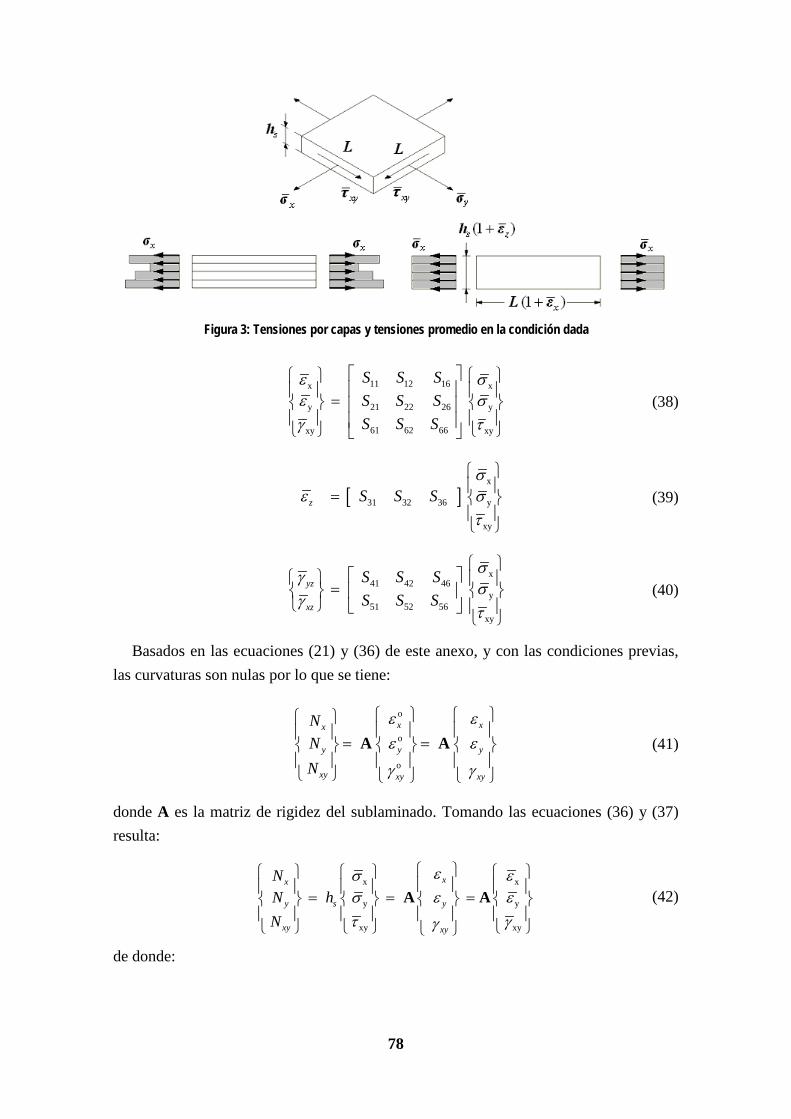
78
Figura 3: Tensiones por capas y tensiones promedio en la condición dada
11 12 16x x
y 21 22 26 y
61 62 66xy xy
S S SS S SS S S
ε σε σγ τ
=
(38)
[ ]x
31 32 36 y
xy
z S S Sσ
ε στ
=
(39)
x
41 42 46y
51 52 56xy
yz
xz
S S SS S S
σγσ
γτ
=
(40)
Basados en las ecuaciones (21) y (36) de este anexo, y con las condiciones previas, las curvaturas son nulas por lo que se tiene:
o
o
o
xx
y
x
y y
yxy xyx
NNN
ε εε ε
γ γ
= =
A A (41)
donde A es la matriz de rigidez del sublaminado. Tomando las ecuaciones (36) y (37) resulta:
x x
y y
xy xy
xx
y s y
xy xy
NNN
hεσ ε
σ ε ετ γγ
= = =
A A (42)
de donde:

79
x x 11 12 16 x
y y 21 22 26 y
xy xy 61 62 66 xy
s
S S S
h S S S
S S S
ε σ σ
ε σ σ
γ τ τ
−
= =
1A (43)
Bajo la condición de tensión plana, la deformación transversal puede escribirse según lo descrito en la ecuación (5) del Capítulo 2:
[ ]13 23 36 yz
x
xy
S S Sσ
ε στ
=
(44)
donde , ,x y xyσ σ τ son las tensiones en las capas como lo muestra la Figura 3. Recordando la relación tensión-deformación para tensión plana presentada en la ecuación (21) de Capítulo 2, se tiene:
x x
y y
xy xy
σ εσ ετ γ
=
Q (45)
Utilizando las ecuaciones previas (44) y (45), junto a (37), la ecuación (44) se convierte en:
[ ]x
13 23 36 y
xy
z sS S S hσ
ε στ
−
=
1Q A (46)
Utilizando nuevamente las definiciones dadas en (37) y reemplazando la integral con la sumatoria extendida al número de capas, M, resulta:
[ ] ( )x
13 23 36 1 y1
xy
M
k k kk
z S S S z zσ
ε στ
−−
=
= −
∑ 1Q A (47)
[ ]x
31 32 36 y
xy
z S S Sσ
ε στ
=
(48)
En la condición analizada en el presente caso, la ecuación (40) puede escribirse como:
x
41 42 46y
51 52 56xy
00
S S SS S S
σστ
=
(49)
Esta condición se satisface sólo si:

80
41 42 46
51 52 56
0 0 00 0 0
= S S SS S S (50)
4.2 Elementos de la matriz S debido a las tensiones fuera del plano
Aquí se considera que en el laminado se tienen únicamente tensiones transversales, lo cual se consigue considerando:
a. Un sublaminado restringido en sus extremos de modo que las deformaciones, , yx xy yε ε γ sean nulas, al que se le aplica una tensión uniformeσ σ=z z que
genera las tensiones , ,σ σ τx y xyy en el plano.
b. Un sublaminado al que se aplica una tensión plana , , yx y xyσ σ τ− − − .
c. Se superponen las condiciones a) y b) con lo que se logra un laminado en el que , , , yxz yzx y xyσ σ τ τ τ son nulas.
(a) (b) (c)
Figura 4: (a) Laminado restringido en sus extremos, (b) Laminado sujeto a una tensión σ x y (c) Sublaminado no restringido sujeto a un tensión σz
Las relaciones tensión-deformación para la condición ‘a.’ se convierten en:
13
23
63
ε σε
γ
=
x
y z
xy
SSS
(51)
33z zSε σ= (52)
43
53
σγγ
=
yz
xzz
SS
(53)
Aplicando las ecuaciones anteriores en la ecuación (3) del Capítulo 2, se obtiene:
33
13
23
63
z z
x
y z
xy
CC
C
C
σ
σστ
ε
ε =
=
(54)
de donde:
81
33
33
13
23
63
1
1
z z
x
y z
xy
CC
C
CC
σ
σ
ε
σστ
=
=
(55)
Combinando estas ecuaciones en las correspondientes de (36) y (37), y reemplazando la integral por una sumatoria:
( )
33
1
1 33
1 1
1
sz zh
s
Mk k
zks k
dsh C
z zh C
σ
σ
ε
−
=
=
−=
∫
∑ (56)
( )
x 131
y 231 33
xy 63
1 Mk k
zks k
Cz z
Ch C
Cσ
σστ
−
=
− =
∑ (57)
Trabajando sobre la condición ‘b.’ usando las ecuaciones (43), (47) y (57) se llega a:
[ ] [ ] ( )
x 131
31 32 36 y 31 32 36 231 33
xy 63
1 Mk k
kz z
s k
Cz z
S S S S S S Ch C
Cστ
σσ
ε −
=
− = − = −
∑ (58)
( )
x 11 12 16 x 11 12 16 131
y 21 22 26 y 21 22 26 231 33
xy 61 62 66 xy 61 62 66 63
1 Mk k
zks k
S S S S S S Cz z
S S S S S S Ch C
S S S S S S C
ε σε σγ τ
σ−
=
− = − = −
∑ (59)
Con la condición ‘c.’ de superposición, operando sobre las ecuaciones (56), (58) y (59) se obtiene:
( ) [ ] ( )
13
23
63
13
1 131 32 36 23
1 133 33
63
1 1M Mk K k k
zk ks s
J
zk k
J
J
Cz z z z
S S S Ch C h C
C
ε σ− −
= =
− −
= −
∑ ∑
(60)

82
( )
33
x 11 12 16 13
1y 21 22 26 23
1 33
xy 61 62 66 63
1 Mk k
zks k
J
S S S Cz z
S S S Ch C
S S S C
σ
ε
ε
γ
−
=
− = −
∑
(61)
Debido a que yτ τxz yz son nulas, y a la condición de ortotropía mostrada en la matriz de rigidez en la ecuación (6) del Capítulo 2, las deformaciones yγ γxz yz resultan nulas, y con la definición de (37), se tiene:
43
53
0
0σ
=
z
S
S (62)
esta ecuación se satisface únicamente si:
43
53
0
0
S
S
=
(63)
4.3 Elementos de S debido a tensiones cortantes fuera del plano
Para este desarrollo se aplican las tensiones cortantes yτ τxz yz en el sublaminado. Las tensiones , ,σ σ σ τx y z xyy son nulas, de modo que las relaciones tensión-deformación son:
44 45
54 55
yz yz
xz xz
S S
S S
γ γ
γ γ
=
(64)
14 15
24 25
34 35
64 65
x
y yz
z xz
xy
S SS SS SS S
εε τε τγ
=
(65)
Para una sola capa tenemos:
44 45
54 55
yz yz
xz xz
S S
S S
γ τ
γ τ
=
(66)
Combinando las ecuaciones (37) y (66) y reemplazando las integrales por sumatorias el resultado es:
( ) 44 451
1 54 55
1 M
yzyzk k
s k xzxz k
S Sz z
h S S
τγ
τγ −=
= −
∑ (67)
83
lo cual permite determinar los elementos correspondientes de S por inspección simple de (64) y (67):
( )44 45 44 451
54 55 54 551
1 M
yzk k
s k xzk
S S S Sz zS S S Sh
ττ−
=
= − ∑ (68)
Para sublaminados sometidos a tensiones que provocan únicamente deformaciones yzγ y xzγ con todas las demás deformaciones nulas, la relación (65) se torna:
14 15
24 25
34 35
64 65
0000
yz
xz
S SS SS SS S
ττ
=
(69)
de modo que:
14 15
24 25
34 35
64 65
0 00 00 00 0
S SS SS SS S
=
(70)
4.4 Conformación de la matriz de rigidez
Combinando los resultados obtenidos en los tres pasos previos, se obtiene la relación deformación-tensión siguiente:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
x x
y y
z z
yz yz
xz xz
xy xy
S S S S S SS S S S S SS S S S S S
S S S S S SS S S S S SS S S S S S
σ
σ
σ
τ
τ
τ
ε
ε
ε
γ
γ
γ
=
(71)
La matriz de rigidez se obtiene invirtiendo la matriz de flexibilidad S. Para el caso de la condición de tensión plana, la relación (71) se transforma en:
x 11 12 16 x
y 21 22 26 y
xy 61 62 66 xy
S S SS S SS S S
ε σε σγ τ
=
(72)

84
85
BIBLIOGRAFÍA
[1] Reedy, J.N., Mechanics of Laminated Composite Plates and Shells, Second Edition, CRC Press, Boca Raton, USA, 2004.
[2] The Boeing Company, Composites in the airframe and primary structure, Boeing 787, From the Ground Up, Aeromagazine, 04, 2006.
[3] Getting started with Abaqus: Interactive Edition, Dassault Systèmes, Providence, USA., 2010.
[4] McCarthy, M.A., BOJCAS: Bolted joints in composite aircraft structures. Air and Space Europe, 3, 3/4, pp.139-142, 2001.
[5] McCarthy, M.A., McCarthy, C.T., Lawlor, V.P. and Stanley, W.F., Three-dimensional finite element analysis of single-bolt, single-lap composite bolted joints, Composite Structures, 71, pp.140-158, 2005.
[6] Morales, M. y Quadri, T., Caracterización de uniones mecánicas en materiales compuestos, Proyecto de Grado de la FCEFyN, U.N.C., 2011.
[7] Paris, F., Cañas, J. y Marín, J.C., Introducción al Análisis y Diseño con Materiales Compuestos, Primera Edición, Universidad de Sevilla, Sevilla, España, 2006.
[8] Car, E., Oller, S. y Oñate, E., Tratamiento Numérico de Materiales Compuestos, Primera Edición, Centro Internacional de Métodos Numéricos en Ingeniería, Barcelona, España, 2000.
[9] Beckwith, S.W., Quasi-Isotropic Composite Materials/Structures Design - Part I, SAMPE Journal, 48, pp 48, 2012.
[10] Kóllar, L.P. and Springer, G.S., Mechanics of Composite Structures, First Edition, Cambridge University Press, Cambridge, United Kingdom, 2003.
[11] Zienkiewicz, O., Zhu, J. and Taylor, R., The Finite Element Method, Vol. 1 y 2, Sexta Edición, Elsevier, 2006.
[12] Barker, R.M., Lin, F.T. and Dana, J.R., Three Dimensional Finite-Element Analysis of Laminated Composites, Computers & Structures, 2, pp. 1013-1029, 1972.
[13] Barbero, E., Finite Element Analysis of Composite Materials, First Edition, CRC Press, Boca Raton, USA, 2007.
[14] Liu G. and Quek S., The Finite Element Method, A Practical Course, First Edition, Butterworth-Heinemann, 2003.
[15] Oñate, E., Structural Analysis with the Finite Element Method, Vol. 1, First Edition, Springer, Barcelona, España, 2009.
86
[16] Ekh, J., Three-dimensional Stress Analysis. BOJCAS Interim Report, 2001.
[17] Song, G., Composites modeling: analysis procedures and techniques, Conferencia virtual, http://www.simulia.com/download/Webinars/Central_Composite_Series/, 2012.
[18] ASTM Standard. D5961/D5961M-13 Standard Test Method for Bearing Response of Polymer Matrix Composite Laminates, 2013.
[19] Milligan, D., Abaqus Composite Tutorial: Creating a Bolt Preload in 3 Easy Steps, Converging on Composites - The Autodesk Composites Blog: http://info.firehole.com, 2012.
[20] Dominique, F., André, P. and André, Z., Mechanical Behaviour of Materials: Volume II: Fracture Mechanics and Damage. Springer, París, Francia, 2012.
[21] Milligan, D., Abaqus Composite Tutorial – Bolted Joint Contact Definition, Converging on Composites - The Autodesk Composites Blog: http://info.firehole.com/, 2012.
[22] Anderson, B., A Splitting Method for Fast Solution of 3D Contact Problems in Bolted Joints. BOJCAS interim report, 2001.
[23] Ireman, T., Three-dimensional stress analysis of bolted composite single lap joints. Composite Structures, 43, pp.195-216, 1998.
[24] Ramkumar, R.L. and Tossavainen, E., Bolted Joints in Composite Structures: Design, Analysis and Verification. Air Force Wright Aeronautical Laboratories, Hawthorne, USA. 1985.
[25] Rowlands, R.E., Rahman, M.U., Wilkinson, T.L. and Chiang, Y.I., Single and multiple bolted joints in orthotropic materials, Composites, 13, pp. 273-279, 1982.
[26] ASTM Standard. D3039/D3039M-08 Standard Test Method for Tensile Properties of Polymer Matrix Composite Materials, 2008.
[27] Ekh, J., Multi-Fastener Single-lap Joints in Composite Structures, Tesis Doctoral del Royal Institute of Technology, Estocolmo, Suecia, 2006.
[28] McCarthy, C.T. and McCarthy, M.A., Finite element analysis of the effects of clearance on single-shear, composite bolted joints, journal of plastics, rubber and composites, The Institute of Materials, 32, Nº 2, London, United Kingdom, 2003.





























