Embed Size (px)
Citation preview

Engine Knock Sensing Applications (HIP9011EVAL1Z)
APPLICATION NOTE
AN9770Rev 1.00
Nov 6, 2006
HIP9011EVAL1Z Evaluation Board There continues a driving effort by the Government and the automotive industry to make cars more efficient with lower emissions. Tighter and more extensive control of automobile engines by microcontrollers has resulted in significant strides towards these goals.
One of the factors contributing to these improvements is engine ignition control. The HIP9011 helps in the ongoing battle to enhance engine performance by providing more detailed information to the engine microcontroller.
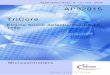
An important point to remember - automotive engines operate most efficiently when the engine is placed in the ignition timing condition just prior to ping or pre-ignition. The closer an engine can operate to this condition, the higher the performance. This is analogous to an operational amplifier, where the higher the gain, the lower the distortion. In the case of the knock signal processing IC, it provides a means of detecting engine knock or ping at levels that were previously unrealizable by amplification and filter means. Figure 1 shows the HIP9011 in a typical engine application.
HIP9011
MOSI
CS
MOSI †SO
SCK
A/DCONVERTER
HOSTMICROCONTROLLER
SPIINTERFACE
ENGINE CONTROL MODULE
KNOCKSENSOR
ENGINE CONTROL SIGNALS
KNOCKSENSOR
INTOUT INT/HOLD
OTHER ENGINESENSOR SIGNALS
FIGURE 1. HIP9011 IN A TYPICAL ENGINE CONTROL APPLICATION
AN9770 Rev 1.00 Page 1 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
Operation of the Signal Processing IC
Inputs from one or two piezoelectric sensors mounted on the engine block are capacitively coupled to the inputs of the operational amplifiers within the HIP9011. Two sensors are shown in the examples in this application note, one for each side of a “V” type of engine configuration. Engines configured in-line may use sensors placed on either end of the engine block. Often only one sensor is used by strategically locating a point where optimum signal output is available. The ability of this IC to have programmable gain changes at each ignition pulse can help with these configurations. In some high end applications two HIP9011 are used.
The input coupling capacitor and series input resistors to the inverting input of the operational amplifiers within the HIP9011 serve as a high pass filter to reduce low frequency components from the transducer. AC coupling also has the advantage of reducing the possibility of driving the output of the input amplifier towards the positive supply with increased leakage resistance of the transducer or environment with time. Leakage resistance to ground will pull the inverting input of the operational amplifier to ground, thus forcing its output high. The non-inverting input of the HIP9011 is not committed, but in most applications, it is usually returned to the mid supply voltage, available as an output terminal of the device.
A signal from the engine’s microcontroller determines which transducer input signal will be processed by the HIP9011 operational amplifier for each ignition pulse by toggling the transmission gate on the output of these amplifiers. From here the signal is applied to an anti aliasing filter within the HIP9011. This filter excludes input signals above 20kHz from passing on to the following switched capacitor filter and gain stages. Signals above 20kHz could cause problems with the 200kHz clocking frequency of the switched capacitor filters and amplifiers. A filter channel is provided in the HIP9011, with a tuning range from 1.22kHz to 19.98kHz, in 64 steps. Serial control signals are sent via the SPI bus to the HIP9011 by the microcontroller. These control signals set the filter frequencies within these ICs.
The output of the Filter Stage in the HIP9011 is applied to a full wave rectifier and then to an integrator. The integrator operation is initiated by the INT/HOLD signal from the microcontroller. It is only during the rising edge of the INT/HOLD signal that the integrator starts from its initial reset condition of 0.125V. Integration is towards the positive supply when a knock signal is present. Severity of the knock signal and the integrators programmable time constant determines the final level. The integrator time constant is programmable in 32 steps from 40s to 600s. This time constant can be viewed as an output signal attenuator. Again, the value of the time constant is set by the SPI control signals from the microcontroller.
Immediately after the INT/HOLD signal goes low, the integrators output signal, INTOUT is held in the HIP9011’s output sample and hold circuit for the microcontroller’s A/D converter to process. Figure 2 shows the block diagram of the HIP9011. Figure 3 shows the waveforms for the integrator, INTOUT on the top trace. The center trace shows the input signal from a simulated pressure transducer mounted on the cylinder. An expanded waveform of the simulated engine input signal during the integration period is shown in the circled display of Figure 3. The bottom trace shows the INT/HOLD signal.
From this discussion we see that we have an IC that can detect low levels of engine knock or ping by using bandpass filters, rectification and an integration process. The gated integrator allows the IC to only monitor engine noise during the time that engine knock is expected to occur, thus, vastly reducing the influence of background noise.
Integrator Operation
Observation of the integrator output signal, INTOUT, is important to the setup and understanding of the operation of this signal processing IC. This observation can be distorted by instrumentation used to view the INTOUT signal. In Figure 5, the upper waveform shows what looks like inaccuracies in the INTOUT signal. This is due to aliasing of the oscilloscope sampling system with only 500 samples. Not shown in this
CLOCK3R
D O
RD
ER
CH
AN
NE
L S
EL
EC
T
SPI
TO SWITCHEDCAPACITORNETWORKS
INT/HOLD 7
VMID
CH0FB 18
CH0IN 19
CHIFB 17
CH1IN 16
3 VDD 1 GND
CH0NI 20
CH1NI 15
+-
+-
SW
ITC
HE
S
AN
TIA
LIA
SIN
G F
ILT
ER
STAGE2 - 0.111
64 STEPS
PROGRAMMABLEGAIN
FILTER1 - 20kHz64 STEPS
PROGRAMMABLEBANDPASS
RECTIFIER
ACTIVEFULL WAVE 40 - 600s
32 STEPS
PROGRAMMABLEINTEGRATOR
HOLD AND
INTOUT 4
PROGRAMMABLEDIVIDER
INTERFACE SO 11SI 12CS 8
SCK 13
OSCOUT 10
OSCIN 9
STATE MACHINE
REGISTERSAND
TEST 14
BIAS CIRCUITS
POWER SUPPLYAND
2
TO SINGLE-ENDEDDIFFERENTIAL
CONVERTER,SAMPLE AND
OUTPUT DRIVER
FIGURE 2. SIMPLIFIED BLOCK DIAGRAM OF THE HIP9011, SINGLE CHANNEL KNOCK SIGNAL PROCESSING IC
AN9770 Rev 1.00 Page 2 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
display is the 200kHz clock signal that only appears during the integration portion of the sample cycle. This signal causes aliasing or a “low frequency beat” in the oscilloscope display between the 500 samples and the 200kHz pulses appearing on the ramp only during the integration interval. Once the signal is acquired, the INTOUT signal during the hold period remains constant and free of the 200kHz pulses until the next integration period. The sample and hold circuit within the HIP9011 is timed so that it only samples during a non pulse period, thus preventing it from acquiring either peaks or valleys.
The lower trace of Figure 5 more accurately depicts the INTOUT waveform. Note the 200kHz clock signal on the integrator ramp. One million samples were used for this display. Also note that INTOUT is constant between integration cycles and shows no 200kHz pulses.
For observation purposes only, or when working with a digital oscilloscope with limited samples, an external anti aliasing filter may be assembled with a series 51k resistor and a 510pF capacitor to ground. The filter attenuates the internal 200kHz clock signal during integration, For operation with a sampling A/D converter that is strobed and samples after the integration cycle, no filter is needed.
Laboratory Setup
It is desirable to get a “feeling” for the operation of the HIP9011 before proceeding to an evaluation with an engine, Figure 6 shows a bench test setup where this can be easily accomplished.
One generator is used to provide the INT/HOLD signal to the Evaluation Board. In the actual application this signal would be supplied by the engine controller. The width of this signal may vary from several hundred microseconds to several milliseconds depending upon the engine rpm and engine type. Generally, there is a large signal at high engine rpms and lower signals at low rpms. At the lower rpm, the integration period may be extended to gain more samples and effectively produce high sensitivity to obtain more output.
The second generator provides the signal that serves as a knock signal. It is interesting to note the variation of the integrator output, INTOUT, as the IC filter frequency or oscillator frequency is varied from 200Hz to 100kHz. Figure 4 shows the IC’s filter response as a sweep frequency signal is applied to only the filter circuit for five selected filter frequencies from 1.22kHz to 19.98kHz. These curves were taken only of the filters to show their response and comparatively constant output through out the entire filter frequency range.
Figure 7 shows the HIP9011 connected to an engine. The microcontroller with inputs from the engine, provides the INT/HOLD signal to initiate operation of the integrator within the knock signal processing IC.
Evaluation Board
Figure 8 shows the schematic diagram of the evaluation board. A 4MHz crystal is supplied with the board. 4MHz ceramic resonators such as the TDK FRC4.0MCS have been successfully used in the board. Three pins are provided on the board to accept resonators to replace the crystal.
A prewired input amplifier configuration board is provided as shown in Figure 9. This board is connected for single ended operation.
Figure 10 shows the schematic diagram for a differential input board that may be wired for the HIP9011. This may be fabricated with the one generic blank board supplied with the evaluation board.
Figure 11 is a top view of the evaluation board.
Software Displays
Figure 12 shows the display for the HIP9011 appearing on the computer when using the Evaluation Board in a Microsoft® Windows® setup. In some Windows setups the text displayed may override the boxes and be difficult to read due to computer settings. This can be corrected by changing the font size on the computer. This is described in the “Installing Knock Signal Processor Software” section of this application note.
FIGURE 3. WAVEFORMS ASSOCIATED WITH THE HIP9011
AN9770 Rev 1.00 Page 3 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
The codes written by the computer for each function are displayed on the lower right side of the display. Multiple settings may easily be obtained by opening more windows with different settings and clicking with the mouse on the desired window, to activate the desired setting.
Figure 13 through Figure 17 shows the writing sequence to the knock processing IC by the computer for various settings of the knock signal processing ICs.
Open Knock Sensor Detection
One means to detect an open sensor is to couple a low level, low frequency AC signal to the amplifier input. If the coupling capacitor value carrying this signal is small compared to the capacitance of the piezoelectric transducer, the coupled signal will be attenuated. To a first order, this would be the capacitance ratio Ccoupling/Csensor. Moreover, if the low level signal’s frequency is below the normal spectrum of engine signals it will be further attenuated by the bandpass filters. To accomplish this function on the Evaluation Board, two terminals are provided. One is marked 900Hz, while the other is the ground return for that signal. When the piezoelectric transducer is removed from the input circuit, the previously attenuated 900Hz signal will become large and drive the IC’s input operational amplifier to full output, which will produce higher frequency components that will
look like a severe knock signal that can not be handled by the control system. Software would then retard the timing to a minimum that would allow the engine to function, but at a lower efficiency level. Service would be required to restore normal engine operation.
Another Open Knock Sensor Approach with a Software Algorithm
The main focus of this method to detect sensor disconnect is based on exploiting the re-programmability of the gain stage within the IC. If a user reprograms the gain stage, for example, at every 5th engine revolution for an open sensor condition, the response time and accuracy of the feedback knock sensor control should not impair the engine performance over most of the entire engine speed range.
The approach is to adjust the GAIN stage prior to supplying the knock signal to the Band Pass Filter stage. To determine the sensor disconnect threshold value for the knock sensor system, the gain would be reduced to the lowest programmable level. This would then provide a signal level/reference value closest to that produced by a sensor that was disconnected.
Then with the GAIN stage programmed to a more normal/frequent operating value, should a sensor become disconnected, the INTOUT signal level would drop to a level
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0500 1k 2k 5k 10k 20k 50k 100k200
FREQUENCY (Hz)
OU
PU
T S
IGN
AL
(V
)
FIGURE 4. RESPONSE OF ONLY THE FILTERS WITHIN THE HIP9011
AN9770 Rev 1.00 Page 4 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
near the level/value that was determined when the GAIN stage was set at the lowest value of gain. From this higher gain value/operating condition, the system could then determine that the sensor has been disconnected.
Another approach that has been suggested is to, at engine start up, advance the engine timing to the knock level and observe the INTOUT signal. If knock cannot be detected, the sensor is assumed open.
Application TipsHere are several important points about the application of the HIP9011 that will enhance the performance of a system using this IC. First, as mentioned previously, it is suggested that a coupling capacitor be placed in series with the transducer. This minimizes the possibility of pulling the inverting input of the operational amplifiers within the IC to ground. Grounding the inverting input forces the amplifier output high, thus limiting the signal handling ability of the amplifiers.
Another important point is to insure that the input amplifier and following stages operate at near their maximum peak to peak signal level without overload under the maximum expected input. Doing this allows the integrator stage to be set to lower gain settings, larger time constants, and thus reduces sensitivity in the output stage. This is analogous to a public address amplifier where the master gain control, analogues to the integrator stage, is set to full gain and the input gain control set to minimum gain. Under these conditions the public system will be noisy.
As a goal keep the output of the input operational amplifiers within half of the maximum expected output swing. This will insure that the following analog initializing filter has sufficient dynamic range. The switched capacitor gain stage can be used to either attenuate or amplify the signal. By observing these conditions, the signal going into the integrator stage will usually require a large time constant to keep the integrator from saturating. Also, remember that the effective system gain can be increased by increasing the integration window when higher gain is needed, usually, at lower engine speeds.
Other Applications
Because of the extremely unique design of this signal processing IC with over 130,000 programming combinations, the user is afforded maximum flexibility of signal detection and processing. Other applications are possible such as security systems with acoustical spectrum analysis with the aid of the filter within this device. Room, area or system profiles can be stored and compared with current values.
Analysis of heavy transmissions or other machinery with sensors used to detect bearing wear and other acoustical qualities is possible. Here preventive maintenance would be one of the key qualities.
AN9770 Rev 1.00 Page 5 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
FIGURE 5. INTOUT (PIN 4) OUTPUT WAVEFORM DISPLAY INACCURACIES DUE TO DIGITAL SAMPLING SCOPE SETTINGS
NOTE: FREEDOM FROM THE EFFECTS OF
INT/HOLD
(PIN 7)
CAPTURED WAVEFORMS
DISPLAY ERROR FINAL INTEGRATION VALUE
NOTE: SAMPLING RATE SET TOO LOW
INITIAL INTEGRATOR RESETDISPLAY ERROR
ALIASING WITH MORE SAMPLES
INTOUT (PIN 4)
INTHOLD (PIN 7)
INTOUT (PIN 4)
AN9770 Rev 1.00 Page 6 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
FIGURE 6. KNOCK SENSOR IC EVALUATION BOARD CONNECTIONS FOR BENCH TESTING
PULSE GENERATOR
50Hz1- 10ms
GROUND - PIN 1
INT/HOLD - PIN 5
SINE WAVE GENERATOR
2.46kHz
THESE CONNECTIONS
PULSE GENERATOR USED
SINE WAVE GENERATOR
25 PIN D SHELL
9 PIN D SHELL CABLE - MALE
PC RUNNING MICROSOFT® WINDOWS 95®
9 PIN D SUBMINIATURE
1 - GROUND2 - MOSI3 - +5V
4 - SCK5 - INT/HOLD
6 - INTOUT7 - TEST8 - CS9 - MISO
TO GENERATE 0 TO 5VINT/HOLD SIGNAL
CONNECTOR PINOUT
1kHz TO 20kHz, 0mV TO 500mV
INCLUDE GROUND
OR WINDOWS 98®
CABLE - MALE TO MALETO PC PARALLEL PORT
TRIGGER SCOPE ONTHIS SIGNALOR TRIGGER
FROM PULSE GENERATOR
120V AC TO 9V DC WALL SUPPLY
J2J1
D1C1
VRL
1 3 JJ3 R1 13
R2
7 R3
C2
C3
5V
GND
74H
CT
1E5
U2
C4 C574HCT14UL
1
GND
SC
K J
PC
S J
PT
ES
T J
PM
OS
1 O
R S
1JP
SCKCS
INT/HOLD
900Hz
GND
C6
11
J414
R5
C11 2 5
3
C10
R5CBR6
XLDSOUT
R4
C7VMIDINTOUT
MDSI OR SIMISO OR S0 GND
HIP9010/L1
EXT
DSCINC9
U3CLOCK
J5
CO
NF
IGU
RA
TIO
N N
ET
WO
RK
U4
TEST
HIP9011EVAL1Z REV A Evaluation BoardRoHS 1-888-INTERSIL
AN9770 Rev 1.00 Page 7 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
FIGURE 7. KNOCK SENSOR IC EVALUATION BOARD CONNECTIONS FOR TESTING WITH AN ENGINE
ENGINE CONTROL MODULE
ENGINE CONTROL SIGNALS
9 PIN D SHELL CABLE (MALE)
120V AC TO 9V DC WALL SUPPLY
J2J1
D1C1
VRI
1 3 JJ3 R1 13
R2
7 R3
C2
C3
5V
GND
74H
CT
1E
5U
2
C2 C574HCT14UL
1
GND
SC
K J
PC
S J
PT
ES
T J
PM
OS
1 O
R S
I JP
SCKCS
INT/HOLD
900Hz
GND
C6
11
J414
R5
C11 2 5
3
C10
CBR6
XLDSOUT
R4
C7VMID
INTOUT
MDSI OR SIMISO OR S0 GND
HIP9010/11
EXT
DSCINC9
U3CLOCK
J5
CO
NF
IGU
RA
TIO
N N
ET
WO
RK
U4
TEST
HOSTMICROCONTROLLER
INT/HOLD PIN 5 ON 9 PIN CONNECTOR
(SUPPLIES INT/HOLD SIGNAL FROMENGINE CONTROL MODULE)
KNOCK SENSORKNOCK SENSOR
ENGINE SENSOR INPUTS
HIP9011EVAL1Z REV A Evaluation BoardRoHS 1-888-INTERSIL
AN9770 Rev 1.00 Page 8 of 15Nov 6, 2006

AN
97
70R
ev 1.0
0P
age 9 of 1
5N
ov 6
, 2006
20
21
22
23
24
25
26
27
28
19
18
17
16
15
TIONv+
12
3
4
5
5 PIN
PIN NUMBERS
0.1
F
FEMALEDINCONNECTOR
ARE THEBACKSIDE ORPC BOARD SIDEOF THECONNECTOR
74HCT14
0.1F
2 3
1/4 74HCT12514
V+
0.1F1
7
FIGURE 8. HIP9011 EVALUATION BOARD SCHEMATIC DIAGRAM
123456789
10121314151617181920
11
1
2
3
4
5
6
7
8
9
10
11
12
13
14
V+ = 5V
V+
4.99k
1M
20pF
20pF
900Hz
CONFIGURA
4MHzCRYSTAL
4.99k
DATA 7
DATA 6DATA 5
DATA 4
DATA 3
DATA 2
DATA 1
DATA 0-STROBE
-BUSY
-INIT-ERROR
AUTO FD XT
-SLCTIN
-PAPER EMPTY
13
1
17
18
16
14
11
9
23
45
6
7
8
9
1225
15
1
5
6
+SELECT
24
23
22
21
2019
10
1K
1K
1k
INT/HOLD
CS SCK
25 PIN FEMALE
9 PIN FEMALE
TESTMOSI
MISO or SO
INTOUT
6 5
5 64
1 2
3 4
89
10
1112
1311 10
1/6 74HCT14
74HCT14
1/674HCT14
74HCT14
74HCT125
74HCT12574HCT125
EXT CLOCK
100F
V+
V+
VMID
5
0.22F 0.1F
0.1F
0.022F
1/41/4
1/4
1/4
1/6
1/6
V+
CS
MOSI OR SI
TEST
SCK
1N4002
7805INPUT VOLTAGE
5V7V TO 15V
D-SHELL
D-SHELL
13 121/6 74HCT14 9 8
1/614
V+
7
ORSI
HIP9011 BOARD

AN
97
70R
ev 1.0
0P
age
10 of 1
5N
ov 6
, 2006
(HIP9011CONFIG1Z)
V+
12
3
4
5
5 PINFEMALEDINCONNECTOR
0.1F
PIN NUMBERSARE THE BACKSIDEOR PC BOARD SIDEOF THE CONNECTOR
FIGURE 9. SCHEMATIC AND FUNCTIONAL DIAGRAMS OF THE HIP9011 SINGLE-ENDED CONFIGURATION BOARD
+-18
19R1, 10K C1, 0.1F
R2, 10K C2, 0.1F
R3, 10K
R4, 20K
1617
VMIDEXTERNAL
HIP9011 SINGLE ENDED INPUT
+-
15
0.1F
0.022F
V+ = 5V
11
12
13
14
15
16
17
18
20
19
10
9
8
7
6
5
4
3
2
1
HIP9011
28
27
26
25
24
23
22
21
20
19
18
17
16
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
900Hz C1, 0.1F
R1, 10K
R3, 20K
R2, 10K
C2, 0.1F
VMID
20
R4, 20K+-
-+

AN
97
70R
ev 1.0
0P
ag
e 11 of 15
No
v 6, 20
06
IP9011_28DIP1Z)
28
27
26
25
24
23
22
21
20
19
18
17
16
15
V+
12
3
4
5
5 PINFEMALEDINCONNECTOR
0.1F
)
PIN NUMBERSARE THEBACKSIDE ORPC BOARD SIDEOF THECONNECTOR
NOTE: Generic configuration board for end-users custom differential input amplifier designs.
FIGURE 10. SCHEMATIC AND FUNCTIONAL DIAGRAMS OF THE HIP9011 GENERIC CONFIGURATION BOARD (H
0.1F
0.022F
V+ = 5V
11
12
13
14
15
16
17
18
20
19
10
9
8
7
6
5
4
3
2
1
HIP9011
1
2
3
4
5
6
7
8
9
10
11
12
13
14
900Hz C1, 0.1F
R6, 10K
R3, 10K
R4, 20K
C2, 0.1F
VMID
+-18
19
R1, 10K C1, 0.1FR3, 10K
R6, 10K
20
-+
1715
R7, 10K
16
EXTERNAL
R8, 20K
R4, 20K
R2, 10K C2, 0.1F
R5, 10K
R110K
R7, 10K
R8, 20K
28
27
26
25
24
23
22
21
20
19
18
17
16
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
HIP9011 GENERIC CONFIGURATION BOARD (HIP9011_28DIP1Z
HIP9011 DIFFERENTIAL INPUT
VMID
+-
-+
†HIP9011 DIFFERENTIAL BOARD NOT SUPPLIED
R2
10K
R5, 10K

AN
97
70R
ev 1.0
0P
age
12 of 1
5N
ov 6
, 2006
3
R5
C8
X1
C9
DSCIN
DSCOUT
CO
NF
IGU
RA
TIO
N N
ET
WO
RK
U4
Board
UT
R
FIGURE 11. HIP9011 EVALUATION BOARD (HIP9011EVAL1Z)
J2 1 9 J3 J R1 13J1
D1C1
VRL
7
R2
R3
C2
C3
5V
GND
74HCT14 C4 C51
74H
CT
125
U1
U2
INT/HOLD
INTOUT
MOSI OR SITEST
MDSO OR S0
VMID
R4
SCK
GND
CS
SC
K J
PC
S J
PT
ES
T J
PM
DS
I O
R S
I JP
J4
1
4
C10 C11 2 5
1
900Hz
GND
C7
GND
HIP9011
EXT CLOCK
1
C6
J5
U3
R6
HIP9011EVAL1Z REV A Evaluation RoHS 1-888-INTERSIL
POWERTIP +7V TO +15V
9 PIN D SUBMINIATURECONNECTOR
25 PIN D SUBMINIATURECONNECTOR
SIGNAL INP5 PIN DIN
CONNECTO
HIP9011

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
Installing Knock Signal Processor Software in Microsoft® Windows 95® and Windows 98®
1. Download the HIP9011EVAL1Z evaluation board software (HIP9011.exe) from the Intersil website to your computer desktop.
2. To run the software, double-click the HIP9011.exe program icon. Multiple programs can be displayed with different conditions. Double-clicking on the desired program will activate those conditions.
WARNING: Set system font to small. Large fonts will causethe program to be unreadable.
If the INT/HOLD signal from either the pulse generator or the engine is not applied to the Parallel Port of the PC, the PC will lock up when you click on the blocks within the block diagram.
When the system is operating, the computer < > keys will step through each item in the selected window on the block diagram. The function is selected or activated by clicking the left mouse button when the spark plug pointer is on that desired function box. The End and Home keys will take the function to either extreme. Clicking with the pointer on the dots of the channel selection switch will activate that channel. Channel 0 is set to a gain of one and Channel 1 is set to a gain of two, so you can see the INTOUT signal increase when switching from Channel 0 to Channel 1.
FIGURE 12. HIP9011 DISPLAY ON PC - DISPLAY IS IN COLOR
AN9770 Rev 1.00 Page 13 of 15Nov 6, 2006

Engine Knock Sensing Applications
(HIP9011EVAL1Z)
NOTE: Above display shows all five words written to the HIP9011 by the PC. The following displays show in more detail each of four words for Gain, Filter Frequency, Integrator TC and Prescaler.
FIGURE 13. DATA WRITING SEQUENCE TO THE HIP9011 VIA THE SPI BUS
FIGURE 14. WRITING THE GAIN BYTE TO THE HIP9011
FIGURE 15. WRITING THE BANDPASS BYTE TO THE HIP9011 FIGURE 16. WRITING THE INTEGRATOR BYTE TO THE HIP9011
FIGURE 17. WRITING THE PRESCALER BYTE TO THE HIP9011
INT/HOLD
SCK
CS
SI
530.0000s230.0000s60.0s/DIV REAL TIME
-70.0000s
INT/HOLD
SCK
CS
188.0000s 238.0000s 288.0000s10.0s/DIV REAL TIME
SI = 100000110
INT/HOLD
SI = 00110000
SCK
CS
-6.0000s 44.0000s 94.0000s10.0s/DIV REAL TIME
INT/HOLD
SI = 11001010
SCK
CS
284.0000s 334.0000s 384.0000s10.0s/DIV REAL TIME
INT/HOLD
SI = 01000001
SCK
CS
94.0000s 144.0000s 194.0000sREAL TIME10.0s/DIV
AN9770 Rev 1.00 Page 14 of 15Nov 6, 2006

http://www.renesas.comRefer to "http://www.renesas.com/" for the latest and detailed information.
Renesas Electronics America Inc.1001 Murphy Ranch Road, Milpitas, CA 95035, U.S.A.Tel: +1-408-432-8888, Fax: +1-408-434-5351Renesas Electronics Canada Limited9251 Yonge Street, Suite 8309 Richmond Hill, Ontario Canada L4C 9T3Tel: +1-905-237-2004Renesas Electronics Europe LimitedDukes Meadow, Millboard Road, Bourne End, Buckinghamshire, SL8 5FH, U.KTel: +44-1628-651-700, Fax: +44-1628-651-804Renesas Electronics Europe GmbHArcadiastrasse 10, 40472 Düsseldorf, Germany Tel: +49-211-6503-0, Fax: +49-211-6503-1327Renesas Electronics (China) Co., Ltd.Room 1709 Quantum Plaza, No.27 ZhichunLu, Haidian District, Beijing, 100191 P. R. ChinaTel: +86-10-8235-1155, Fax: +86-10-8235-7679Renesas Electronics (Shanghai) Co., Ltd.Unit 301, Tower A, Central Towers, 555 Langao Road, Putuo District, Shanghai, 200333 P. R. China Tel: +86-21-2226-0888, Fax: +86-21-2226-0999Renesas Electronics Hong Kong LimitedUnit 1601-1611, 16/F., Tower 2, Grand Century Place, 193 Prince Edward Road West, Mongkok, Kowloon, Hong KongTel: +852-2265-6688, Fax: +852 2886-9022Renesas Electronics Taiwan Co., Ltd.13F, No. 363, Fu Shing North Road, Taipei 10543, TaiwanTel: +886-2-8175-9600, Fax: +886 2-8175-9670Renesas Electronics Singapore Pte. Ltd.80 Bendemeer Road, Unit #06-02 Hyflux Innovation Centre, Singapore 339949Tel: +65-6213-0200, Fax: +65-6213-0300Renesas Electronics Malaysia Sdn.Bhd.Unit 1207, Block B, Menara Amcorp, Amcorp Trade Centre, No. 18, Jln Persiaran Barat, 46050 Petaling Jaya, Selangor Darul Ehsan, MalaysiaTel: +60-3-7955-9390, Fax: +60-3-7955-9510Renesas Electronics India Pvt. Ltd.No.777C, 100 Feet Road, HAL 2nd Stage, Indiranagar, Bangalore 560 038, IndiaTel: +91-80-67208700, Fax: +91-80-67208777Renesas Electronics Korea Co., Ltd.17F, KAMCO Yangjae Tower, 262, Gangnam-daero, Gangnam-gu, Seoul, 06265 KoreaTel: +82-2-558-3737, Fax: +82-2-558-5338
SALES OFFICES
© 2018 Renesas Electronics Corporation. All rights reserved.Colophon 7.0
(Rev.4.0-1 November 2017)
Notice
1. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. You are fully responsible for
the incorporation or any other use of the circuits, software, and information in the design of your product or system. Renesas Electronics disclaims any and all liability for any losses and damages incurred by
you or third parties arising from the use of these circuits, software, or information.
2. Renesas Electronics hereby expressly disclaims any warranties against and liability for infringement or any other claims involving patents, copyrights, or other intellectual property rights of third parties, by or
arising from the use of Renesas Electronics products or technical information described in this document, including but not limited to, the product data, drawings, charts, programs, algorithms, and application
examples.
3. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others.
4. You shall not alter, modify, copy, or reverse engineer any Renesas Electronics product, whether in whole or in part. Renesas Electronics disclaims any and all liability for any losses or damages incurred by
you or third parties arising from such alteration, modification, copying or reverse engineering.
5. Renesas Electronics products are classified according to the following two quality grades: “Standard” and “High Quality”. The intended applications for each Renesas Electronics product depends on the
product’s quality grade, as indicated below.
"Standard": Computers; office equipment; communications equipment; test and measurement equipment; audio and visual equipment; home electronic appliances; machine tools; personal electronic
equipment; industrial robots; etc.
"High Quality": Transportation equipment (automobiles, trains, ships, etc.); traffic control (traffic lights); large-scale communication equipment; key financial terminal systems; safety control equipment; etc.
Unless expressly designated as a high reliability product or a product for harsh environments in a Renesas Electronics data sheet or other Renesas Electronics document, Renesas Electronics products are
not intended or authorized for use in products or systems that may pose a direct threat to human life or bodily injury (artificial life support devices or systems; surgical implantations; etc.), or may cause
serious property damage (space system; undersea repeaters; nuclear power control systems; aircraft control systems; key plant systems; military equipment; etc.). Renesas Electronics disclaims any and all
liability for any damages or losses incurred by you or any third parties arising from the use of any Renesas Electronics product that is inconsistent with any Renesas Electronics data sheet, user’s manual or
other Renesas Electronics document.
6. When using Renesas Electronics products, refer to the latest product information (data sheets, user’s manuals, application notes, “General Notes for Handling and Using Semiconductor Devices” in the
reliability handbook, etc.), and ensure that usage conditions are within the ranges specified by Renesas Electronics with respect to maximum ratings, operating power supply voltage range, heat dissipation
characteristics, installation, etc. Renesas Electronics disclaims any and all liability for any malfunctions, failure or accident arising out of the use of Renesas Electronics products outside of such specified
ranges.
7. Although Renesas Electronics endeavors to improve the quality and reliability of Renesas Electronics products, semiconductor products have specific characteristics, such as the occurrence of failure at a
certain rate and malfunctions under certain use conditions. Unless designated as a high reliability product or a product for harsh environments in a Renesas Electronics data sheet or other Renesas
Electronics document, Renesas Electronics products are not subject to radiation resistance design. You are responsible for implementing safety measures to guard against the possibility of bodily injury, injury
or damage caused by fire, and/or danger to the public in the event of a failure or malfunction of Renesas Electronics products, such as safety design for hardware and software, including but not limited to
redundancy, fire control and malfunction prevention, appropriate treatment for aging degradation or any other appropriate measures. Because the evaluation of microcomputer software alone is very difficult
and impractical, you are responsible for evaluating the safety of the final products or systems manufactured by you.
8. Please contact a Renesas Electronics sales office for details as to environmental matters such as the environmental compatibility of each Renesas Electronics product. You are responsible for carefully and
sufficiently investigating applicable laws and regulations that regulate the inclusion or use of controlled substances, including without limitation, the EU RoHS Directive, and using Renesas Electronics
products in compliance with all these applicable laws and regulations. Renesas Electronics disclaims any and all liability for damages or losses occurring as a result of your noncompliance with applicable
laws and regulations.
9. Renesas Electronics products and technologies shall not be used for or incorporated into any products or systems whose manufacture, use, or sale is prohibited under any applicable domestic or foreign laws
or regulations. You shall comply with any applicable export control laws and regulations promulgated and administered by the governments of any countries asserting jurisdiction over the parties or
transactions.
10. It is the responsibility of the buyer or distributor of Renesas Electronics products, or any other party who distributes, disposes of, or otherwise sells or transfers the product to a third party, to notify such third
party in advance of the contents and conditions set forth in this document.
11. This document shall not be reprinted, reproduced or duplicated in any form, in whole or in part, without prior written consent of Renesas Electronics.
12. Please contact a Renesas Electronics sales office if you have any questions regarding the information contained in this document or Renesas Electronics products.
(Note 1) “Renesas Electronics” as used in this document means Renesas Electronics Corporation and also includes its directly or indirectly controlled subsidiaries.
(Note 2) “Renesas Electronics product(s)” means any product developed or manufactured by or for Renesas Electronics.