Embed Size (px)
Citation preview

An overview of Lidar remote sensing of forests
C. Véga
French Institute of Pondicherry

Outline
Principle and History
Systems and Platform
Data processing / Forestry Airborne discrete Lidar Terrestrial Lidar
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

What is Lidar ? LIght Detection And Ranging or Laser
ScanningActive remote sensing measuring distance to
target based on « time of flight »
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
2
tcR
©Calypso, CNES, 2006
R = ranget = timeC = light speed

History
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Sixties : Airborne laser for measuring flight altitude
Seventies – Eighties : Airborne profiling systems (topography and forestry)
Nineties: Scanning systems with GPS and INS -> Georeferencing
2000 ongoing : Industrial development – costs reduction

Systems
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Full-waveform systems
Discrete systems
Scanning > 300 kHz
Record the complete range of energy reflected by surfaces
Record 1 up to N returns by emitted pulse
Precision : 1 m xy; 0.1 m z

Platforms
SATELLITES(GLAS- 600 km / CALIOP- 705 km)
High Altitude Planes(SLICER)
Mean Altitude Planes
HELICOPTERS Low Altitude(corridor mapping 50-150 m)
500 - 1000 km
8 - 12 km
1200 - 3500 m
100 - 1000 m
ALTITUDE
0 m Ground or Terrestrial Lidar
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Data acquisition
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Small Footprint Airborne Lidar

Data Visualisation
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
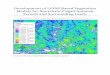
Small Footprint Airborne Lidar
833 m
890 m
Draix, France)

Data Visualisation
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Small Footprint Airborne Lidar

Data Visualisation
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Terrestrial Lidar

Point cloud Processing
Discrete Airborne Laser Scanning (ALS)
Small Scale parameter estimation -> Plot Level Large Scale parameter estimation -> Tree Level
Terrestrial Laser Scanning (TLS)
Stem characterization Tree architecture
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

PreprocessingRaw point cloud DTM
Normalized point cloud= Raw - DTM
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
833 m
890 m
21 m
0 m

Estimating Field parameters from Lidar parameters
Multiplicative models
Stepwise approach
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Forest Parameters
Field = Function (Lidar)
Calibration
Inversion

Small Scale Mapping
Field Plots
Lidar
Grid
Photointerpretation
Terrain + Lidar
Volume estimated per grid cellSummed by stand -> mean/ha
Volume estimation (Naesset, 2005)
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Tree-based approaches - Segmentation methods Local maxima extraction on raster + polygon fitting
(Popescu et al., 2003, 2004)
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Large Scale Mapping

Tree-based approaches - Segmentation methods Direct segmentation of the point cloud
Lateral view Top view
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Large scale mapping

Individual tree approaches
Direct estimation of tree density and tree parameters
Improving equations for volume and biomass (height and crown dimension)
Crown dimension explain better AGB (Popescu 2003)
Stem to stem management -> thinning
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Terrestrial lidar
Limited to small surfaces (Plots) Very high density (mm) Utility for allometry, tree architecture and forest modeling
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Terrestrial Lidar
Stem Characterization Automatic Stem Extraction (PCA- Hough)
(Bac et al. 2013)

Terrestrial Lidar
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
(Bac et al. 2013)

Terrestrial Lidar
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Tree architecture L-Architect (Côté et al. 2011)

Potential for Indian Forestry Measuring biomass -> issue in complex tropical forests Conventional remote sensing -> signal saturation at low
AGB
Lidar Directly related to forest structure No saturation with AGB Best current data for plot and landscape estimation of
forest parameters Utility for calibrating texture indices from satellites
images for ABG estimations at regional level
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Variety of applications…
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore
Geomorphology Habitat Mapping
Angkor ruins under the forest canopy (Chase and al., 2010)
Archeology
Erosion / Flooding
Bird

Thank you !

Forest Parameter Estimation
Plot-based ApproachN Lidar PlotsStatistical descriptors
N Field Plots
Regression analysisValidationLarge scale mapping
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Point Classification
First Return First Return VegetationVegetation
Last Return Last Return GroundGround
Example for an ALS system recording 2 returns Issue: Point penetration within canopy
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Point Classification
Unique return = Ground(First= Last)
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Point Classification
First ReturnVegetation
Last ReturnVegetation
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

Point Classification
Classification algorithms : extracting ground points Lot of approaches and algorithms Best one Iterative Tin – Delauney triangulation
©F. Bretar, 2006
3D points Local minima
Initial TIN Surface
TIN DensificationAngle & Distance
Axelsson (1999)
e Forests - National Workshop on Info Systems for Decision Making in Forestry 9,10 & 11th May 2013 Bangalore

The Big Picture
Mo
del
DynamicFonctionning
T-L
idar
ArchitectureAllometry
Porosity
A-L
idar
StructureBiomass
Dynamics
dbh
Height
Tex
ture
Forest tpyeBiomass
DART Images(AMAP – CESBIO)