Embed Size (px)
Citation preview
An Introduction to Functional Safety for Electrified Powertrains
kVA1708-C Augusta Street, STE 3Greenville, SC [email protected]
copyright kVA, 2016 kVA = engineered safety
Jody J. Nelson, Michael Woon and Agish George
June 27, 2016
kVA = engineered safety
Agenda
kVA = engineered safety
Who is kVA?
• kVA is a technical consulting group based in the U.S., focused on functional safety implementation
• kVA focuses primarily on the ISO 26262 and IEC 61508 standards, but also works in other areas such as, ISO 13849, + others in the U.S. and abroad
• kVA has experience in developing production HEV, PHEV, EV and Fuel Cell vehicles including software and hardware development, diagnostics, EMC, HV safety and functional safety
• kVA provides training services, consulting engineering services, audits and assessments, gap analysis, and engineering softwareto enable functional safety for automotive

kVA = engineered safety
Training and Certification for Safe Vehicle Design and Development
• kVA has a partnership with TÜV-Nord, a leading German safety organization, to provide functional safety training and certification in the English language.
• kVA staff have all achieved the Functional Safety Certified Automotive Engineer (FSCAE), a designation conferred by TÜV-Nordand recognized internationally.
• kVA trains and certifies the industry in functional safety standards and processes• ISO 26262 • IEC 61508
registered certification stamps for kVA managing partners B. Taylor
and J. Nelson
kVA = engineered safety
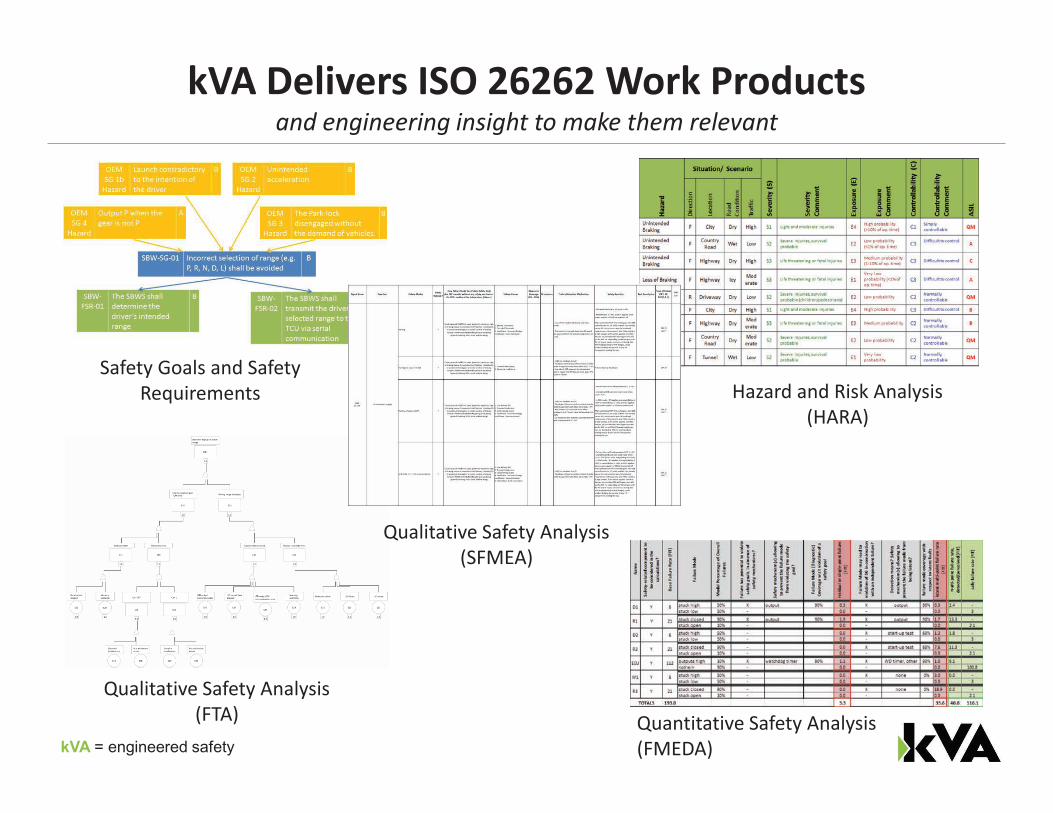
kVA Delivers ISO 26262 Work Productsand engineering insight to make them relevant
Safety Goals and Safety Requirements
Qualitative Safety Analysis (FTA) Quantitative Safety Analysis
(FMEDA)
Hazard and Risk Analysis (HARA)
Qualitative Safety Analysis (SFMEA)
kVA = engineered safety
Introduction to ISO 26262
kVA = engineered safety
Safety Standards: Background
• The original designation of “engineer” was driven by safety
• The first role of an engineer was to ensure dangerous equipment (e.g.., boilers, engines) would not fail with catastrophic results
• engineers followed technical standards for safe design of equipment
• Electronic controls in automobiles now perform safety-critical functions
• Engineers must ensure electronic systems do not fail with catastrophic results
• ISO 26262 is the technical standard for safe design of such systems
7
kVA = engineered safety
What is ISO 26262?
• ISO 26262 is the state of the art standard for functional safety of E/E systems for passenger vehicles– Strongly intertwined with product development– Strong emphasis on functional safety management– Strong emphasis on the early phases of development– Requires traceability throughout entire lifecycle– Not a reliability standard • failures are allowed...• ...but prevention of a safe state
is not
8
kVA = engineered safety
History of ISO 26262
• IEC 61508 is the basis for ISO 26262, but not specific to Automotive
• Ongoing discussions within automotive on functional safety for years
• 2005: approval for New Work Item within ISO
– Working Group 16 (Functional Safety) established under Electrical and electronic equipment (TC22/SC3)
• 2009: Draft version of standard (DIS) available and voting begins
• 2011: Final draft version available (FDIS) for Parts 1 – 9
• 2011: November 15, First edition of ISO 26262 released for Parts 1 – 9
• 2012: August 1, First edition of Part 10 released (not normative)
kVA = engineered safety
Future Roadmap
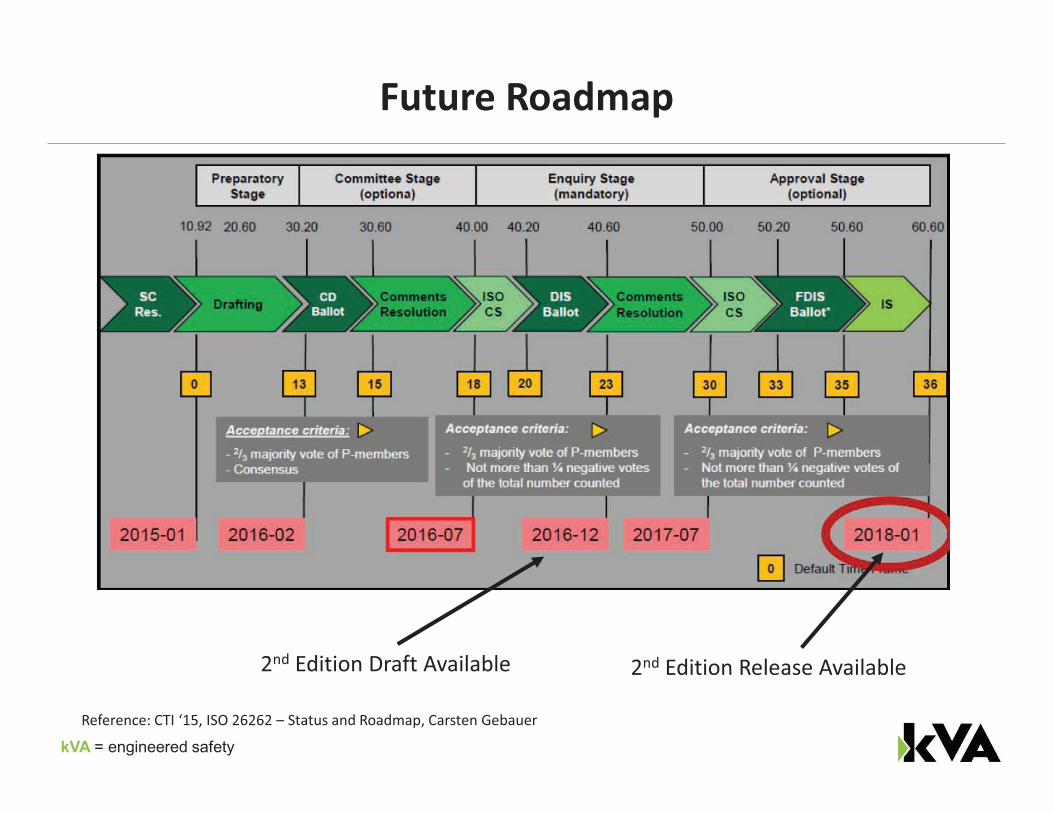
Reference: CTI ‘15, ISO 26262 – Status and Roadmap, Carsten Gebauer
2nd Edition Draft Available 2nd Edition Release Available
kVA = engineered safety
Future Roadmap
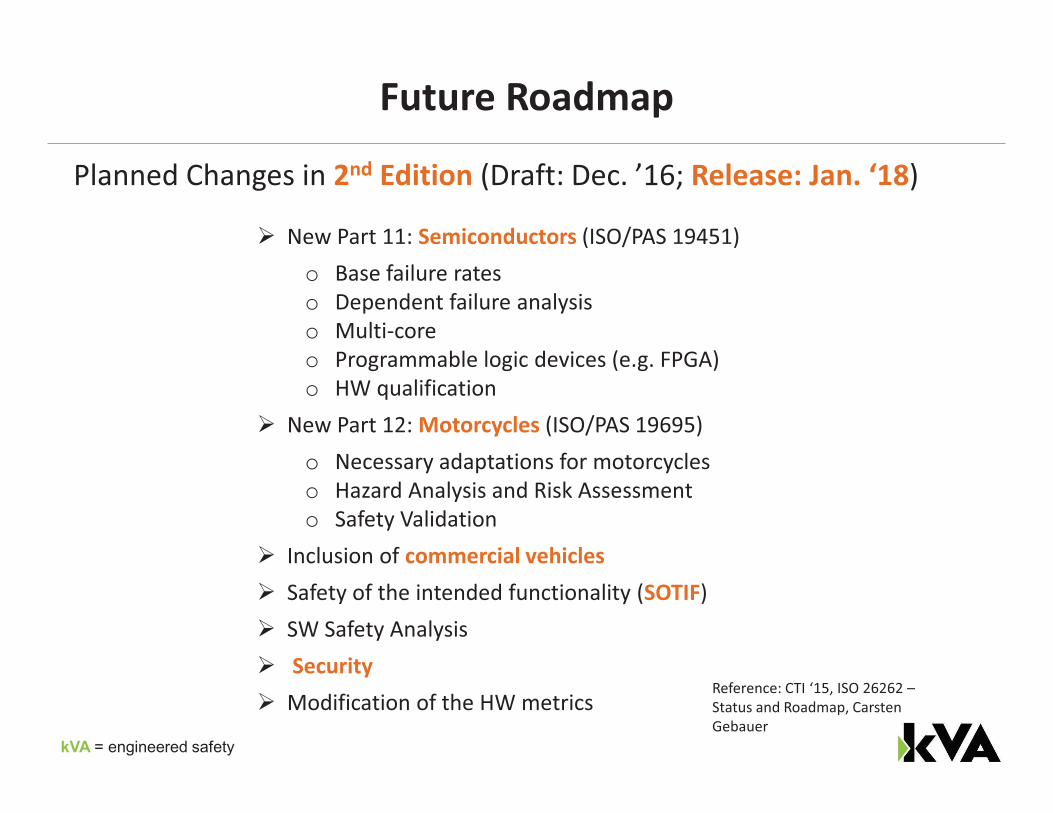
� New Part 11: Semiconductors (ISO/PAS 19451)o Base failure rateso Dependent failure analysiso Multi-coreo Programmable logic devices (e.g. FPGA)o HW qualification
� New Part 12: Motorcycles (ISO/PAS 19695)o Necessary adaptations for motorcycleso Hazard Analysis and Risk Assessmento Safety Validation
� Inclusion of commercial vehicles� Safety of the intended functionality (SOTIF)� SW Safety Analysis� Security� Modification of the HW metrics
Reference: CTI ‘15, ISO 26262 –Status and Roadmap, Carsten Gebauer
Planned Changes in 2nd Edition (Draft: Dec. ’16; Release: Jan. ‘18)
kVA = engineered safety
State of the Art
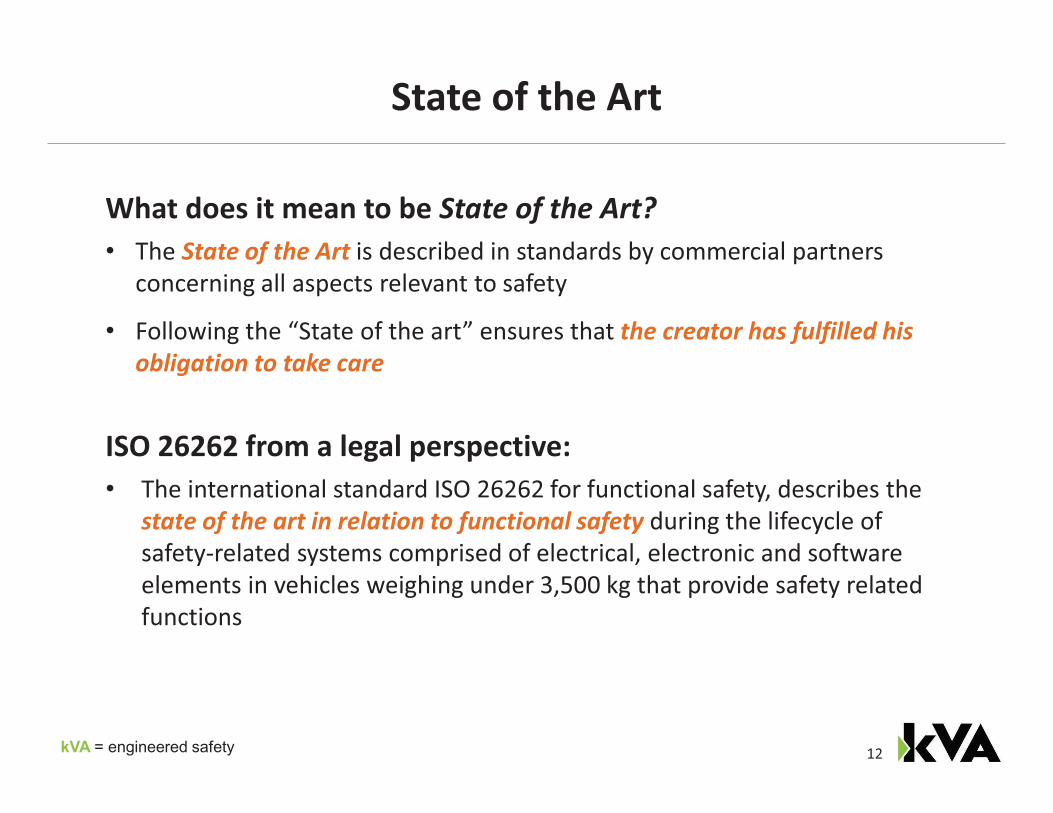
What does it mean to be State of the Art?• The State of the Art is described in standards by commercial partners
concerning all aspects relevant to safety
• Following the “State of the art” ensures that the creator has fulfilled his obligation to take care
ISO 26262 from a legal perspective:• The international standard ISO 26262 for functional safety, describes the
state of the art in relation to functional safety during the lifecycle of safety-related systems comprised of electrical, electronic and software elements in vehicles weighing under 3,500 kg that provide safety related functions
12
kVA = engineered safety
State of the Art
How to adapt to the State of the Art?
� Manufacturers must implement any safety measure, that is:
� Necessary to reduce the residual risk of a product
� Available according to the current State of the Art
� Affordable considering the cost-benefit ratio
� Obligation to apply available solutions, but not to develop new solutions or to press ahead of the State of the Art
Reference: CTi ‘15, Functional safety new questions arise; Andreas Reuter
kVA = engineered safety
Legal Aspect: Functional Safety Standards
14
Trials deal with what you did 10 or 15 years ago…
� What can save you are:
� Well defined processes that were followed
� Good documentation
Reference: CTi ‘15, U.S. Legal Issues – Overview and Practical Considerations; Clay Guise

kVA = engineered safety
Legal Aspect: Functional Safety Standards
15
Reference: CTi ‘15, Functional safety new questions arise; Andreas Reuter
Product liability puts the burden of proof for acting with due care on the
manufacturer. Therefore manufacturers must be able to
provide evidence by appropriate documentation that they ensured the
safety of its product with due care.

kVA = engineered safety
Legal Aspect: Functional Safety Standards
16
Reference: CTi ‘15, U.S. Legal Issues – Overview and Practical Considerations; Clay Guise
How a standard can be used in U.S. Law
– Product meets the standard– Standard applies but it was not met– If standard had been met, product would be “better”– Others do it “better” or “differently”
kVA = engineered safety
What does NHTSA say?
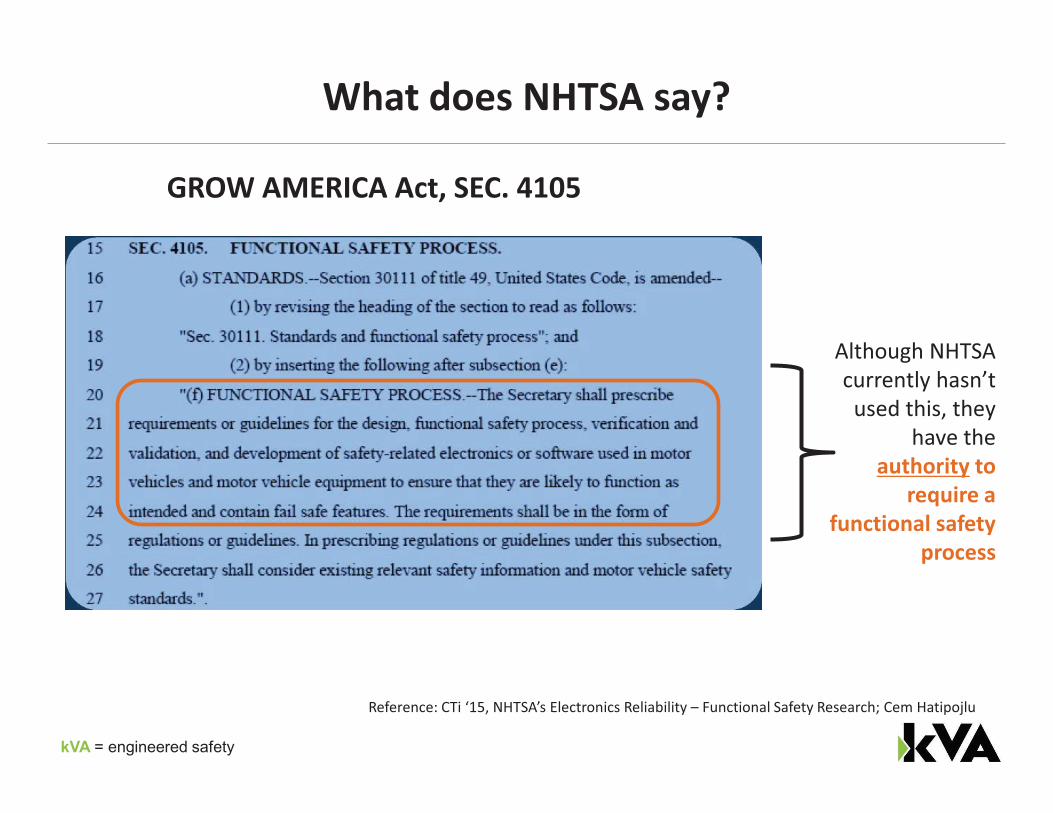
Reference: CTi ‘15, NHTSA’s Electronics Reliability – Functional Safety Research; Cem Hatipojlu
Although NHTSA currently hasn’t
used this, they have the
authority to require a
functional safety process
GROW AMERICA Act, SEC. 4105
kVA = engineered safety
Scope of ISO 26262
• “ISO 26262 is intended to be applied to safety-related systems that include one or more electrical and/or electronic (E/E) systems and that are installed in series production passenger cars with a maximum gross vehicle mass up to 3500 kg.”– Systems and their components released for production, or systems and
their components already under development prior to the publication date of ISO 26262, are exempted from the scope
– ISO 26262 does not address unique E/E systems in special purpose vehicles such as vehicles designed for drivers with disabilities.
18
kVA = engineered safety
Scope of ISO 26262
• “ISO 26262 is intended to be applied to safety-related systems that include one or more electrical and/or electronic (E/E) systems and that are installed in series production passenger cars with a maximum gross vehicle mass up to 3500 kg.”
– ISO 26262 addresses possible hazards caused by malfunctioning behavior of E/E safety-related systems, including interaction of these systems. It does not address hazards related to electric shock, fire, smoke, heat, radiation, toxicity, flammability, reactivity, corrosion, release of energy and similar hazards, unless directly caused by malfunctioning behavior of E/E safety-related systems.
– ISO 26262 does not address the nominal performance of E/E systems, even if dedicated functional performance standards exist for these systems • e.g.. active and passive safety systems, brake systems, Adaptive Cruise Control
19
kVA = engineered safety
The Need for ISO 26262
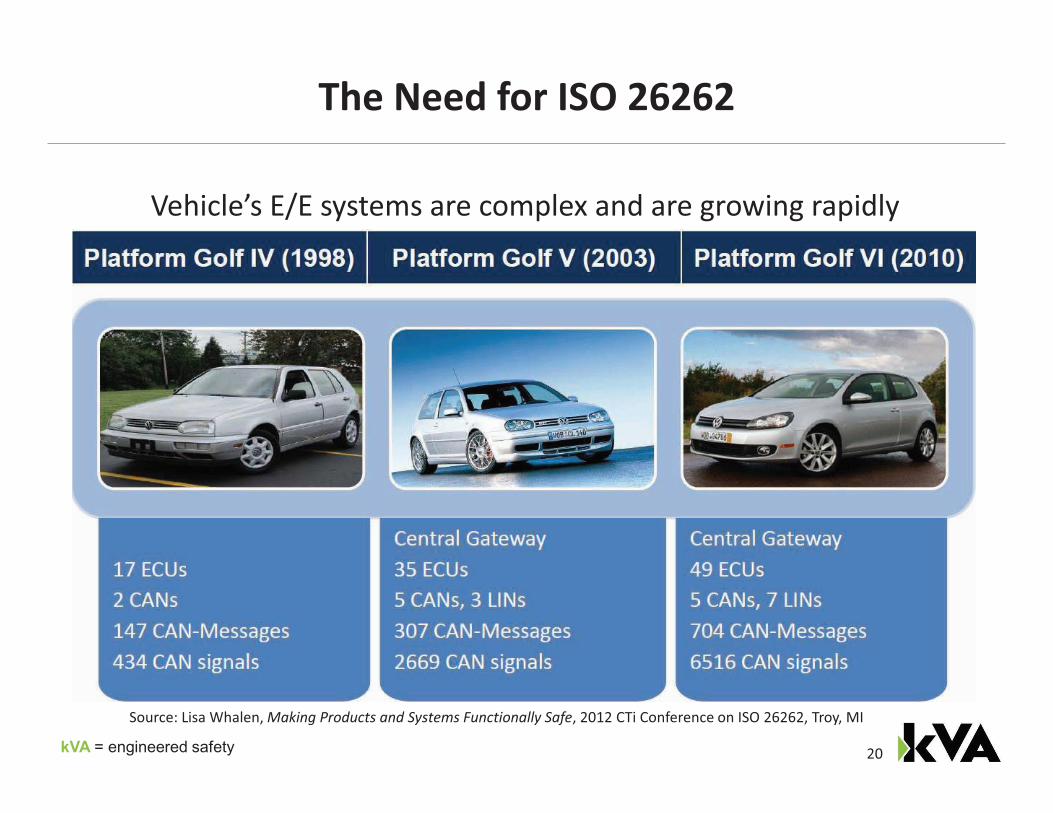
Source: Lisa Whalen, Making Products and Systems Functionally Safe, 2012 CTi Conference on ISO 26262, Troy, MI
Vehicle’s E/E systems are complex and are growing rapidly
20

kVA = engineered safety
The Need for ISO 26262
1 Source: Robert Charette, This Car Runs on Code, IEEE Spectrum, February 2009
F-22 Raptor1.7 Million
F-35 Joint Strike Fighter5.7 Million
Boeing 787 Dreamliner6.5 Million
2009 MB S-Class20 Million1 (radio and navigation only)
~100 Million (today)~70-100 ECUs
~200-300 Million (predicted future)
Complex Vehicle Software Size (lines of code)
21
kVA = engineered safety
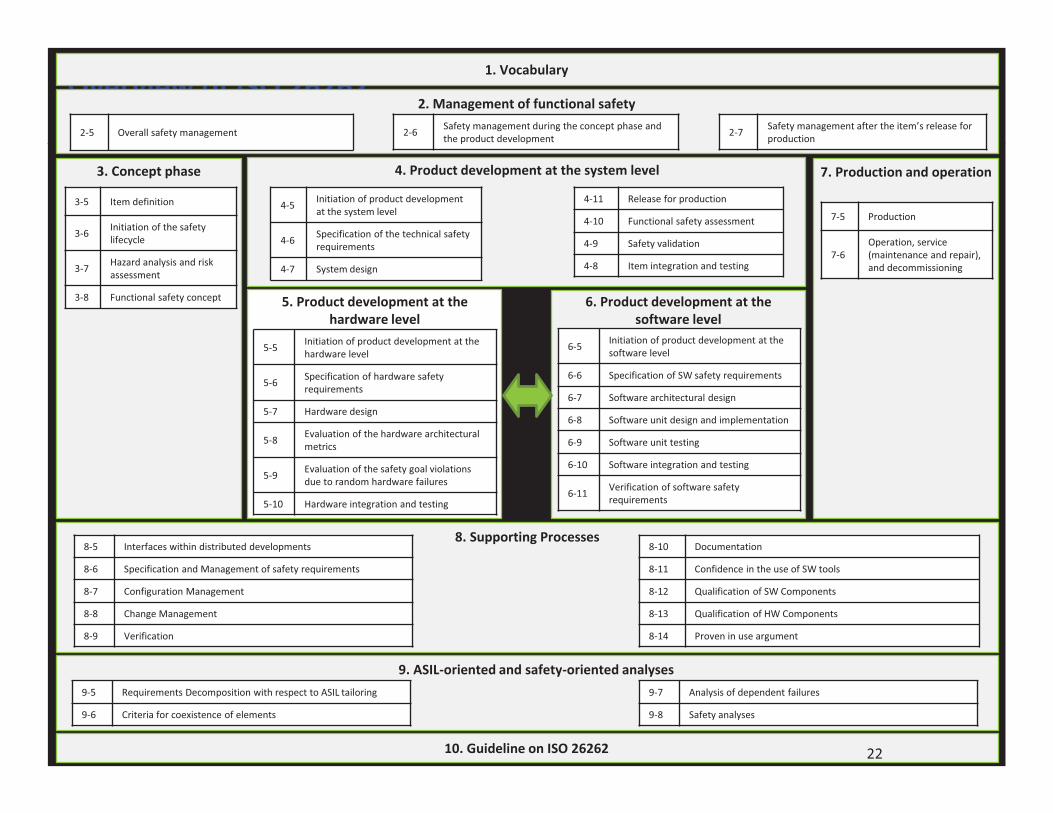
Structure of ISO 26262Overview of ISO 26262 m
8-5 Interfaces within distributed developments
8-6 Specification and Management of safety requirements
8-7 Configuration Management
8-8 Change Management
8-9 Verification
8-10 Documentation
8-11 Confidence in the use of SW tools
8-12 Qualification of SW Components
8-13 Qualification of HW Components
8-14 Proven in use argument
9-5 Requirements Decomposition with respect to ASIL tailoring
9-6 Criteria for coexistence of elements
9-7 Analysis of dependent failures
9-8 Safety analyses
2-5 Overall safety management 2-6 Safety management during the concept phase and the product development 2-7 Safety management after the item’s release for
production
2. Management of functional safety
1. Vocabulary
4. Product development at the system level 7. Production and operation3. Concept phase
5. Product development at the hardware level
6. Product development at the software level
8. Supporting Processes
9. ASIL-oriented and safety-oriented analyses
4-11 Release for production
4-10 Functional safety assessment
4-9 Safety validation
4-8 Item integration and testing
4-5 Initiation of product development at the system level
4-6 Specification of the technical safety requirements
4-7 System design
5-5 Initiation of product development at the hardware level
5-6 Specification of hardware safety requirements
5-7 Hardware design
5-8 Evaluation of the hardware architectural metrics
5-9 Evaluation of the safety goal violations due to random hardware failures
5-10 Hardware integration and testing
3-5 Item definition
3-6 Initiation of the safety lifecycle
3-7 Hazard analysis and risk assessment
3-8 Functional safety concept
7-5 Production
7-6Operation, service (maintenance and repair), and decommissioning
10. Guideline on ISO 26262 22
6-5 Initiation of product development at the software level
6-6 Specification of SW safety requirements
6-7 Software architectural design
6-8 Software unit design and implementation
6-9 Software unit testing
6-10 Software integration and testing
6-11 Verification of software safety requirements
kVA = engineered safety
Definitions
kVA = engineered safetykVA i d f t
ISO 26262 Vocabulary
risk � Combination of the probability of occurrence of harm (1.56) and the severity (1.120) of that harm.
tolerable risk � Risk (1.99) which is accepted in a given context based on the current moral concept of society.
24
unreasonable risk � Risk (1.99) judged to be unacceptable in a certain context according to valid societal moral concepts
kVA = engineered safety
ISO 26262 Vocabulary
safety � The absence of unreasonable risk (1.136).
functional safety � Absence of unreasonable risk due to hazards caused by malfunctioning behaviour of E/E systems.
25
E/E system � System (1.129) that consists of electrical and/or electronic elements (1.32), including programmable electronic elements.
kVA = engineered safety
ISO 26262 Vocabulary
ASIL (Automotive Safety-Integrity-Level) � One of four levels to specify the item's (1.69) or element's (1.32) necessary requirements of ISO26262 and safety measures (1.110) to apply for avoiding an unreasonable residual risk (1.97), with D representing the most stringent and A the least stringent level.”
SI (safety integrity) � Probability that a safety-related system fulfils the required safety functions on demand under all given conditions within a fixed time period.
26
kVA = engineered safety
Transitioning to a Safe State
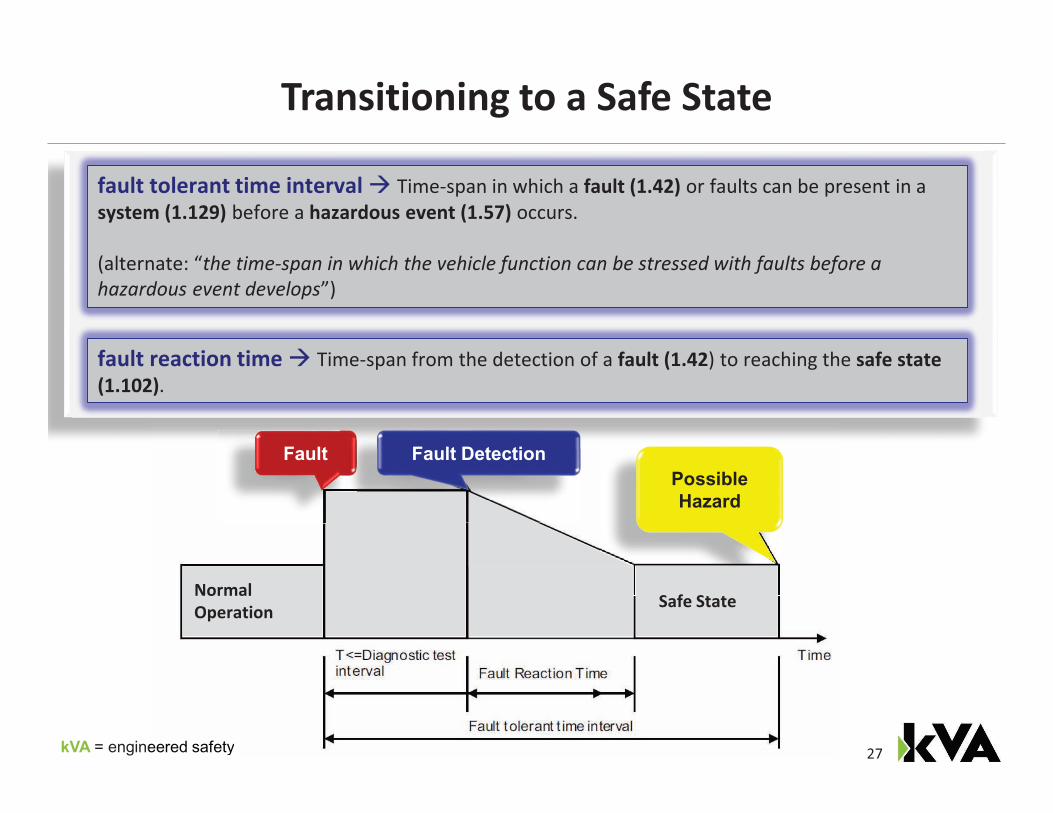
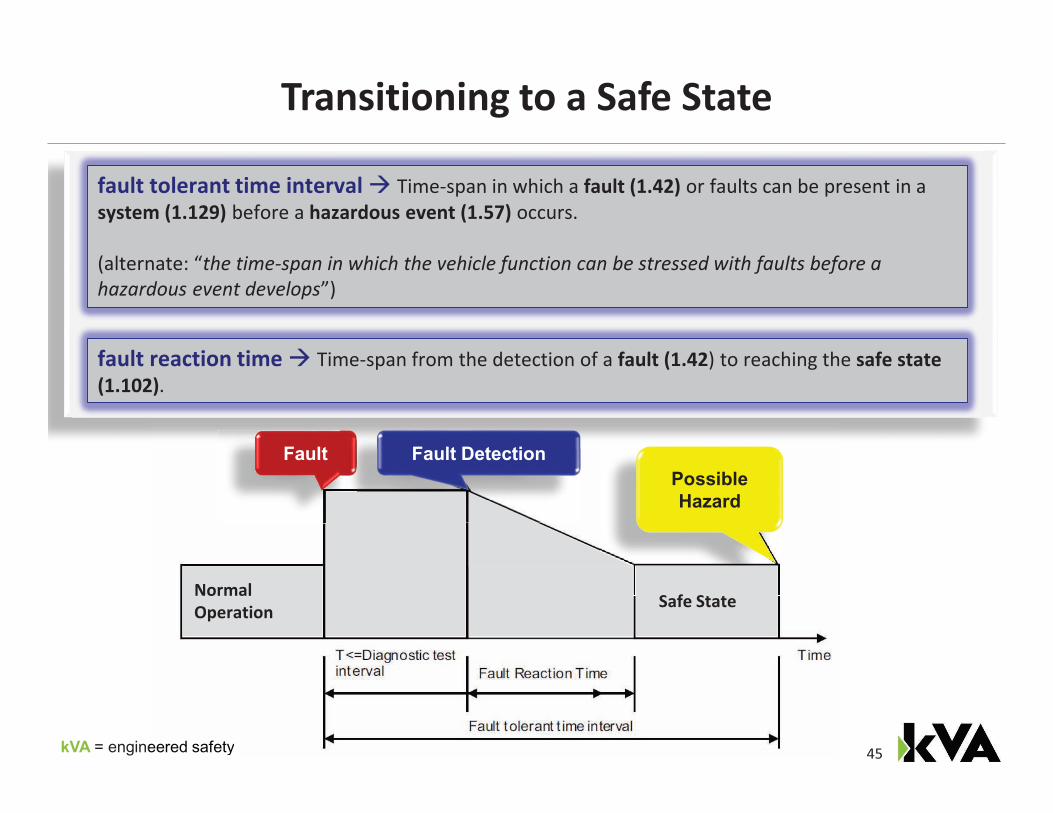
fault tolerant time interval � Time-span in which a fault (1.42) or faults can be present in a system (1.129) before a hazardous event (1.57) occurs.
(alternate: “the time-span in which the vehicle function can be stressed with faults before a hazardous event develops”)
fault reaction time � Time-span from the detection of a fault (1.42) to reaching the safe state (1.102).
eered safety
Fault Fault DetectionPossibleHazard
Normal Operation Safe State
27
kVA = engineered safety
ISO 26262 Part 2Safety Management
28
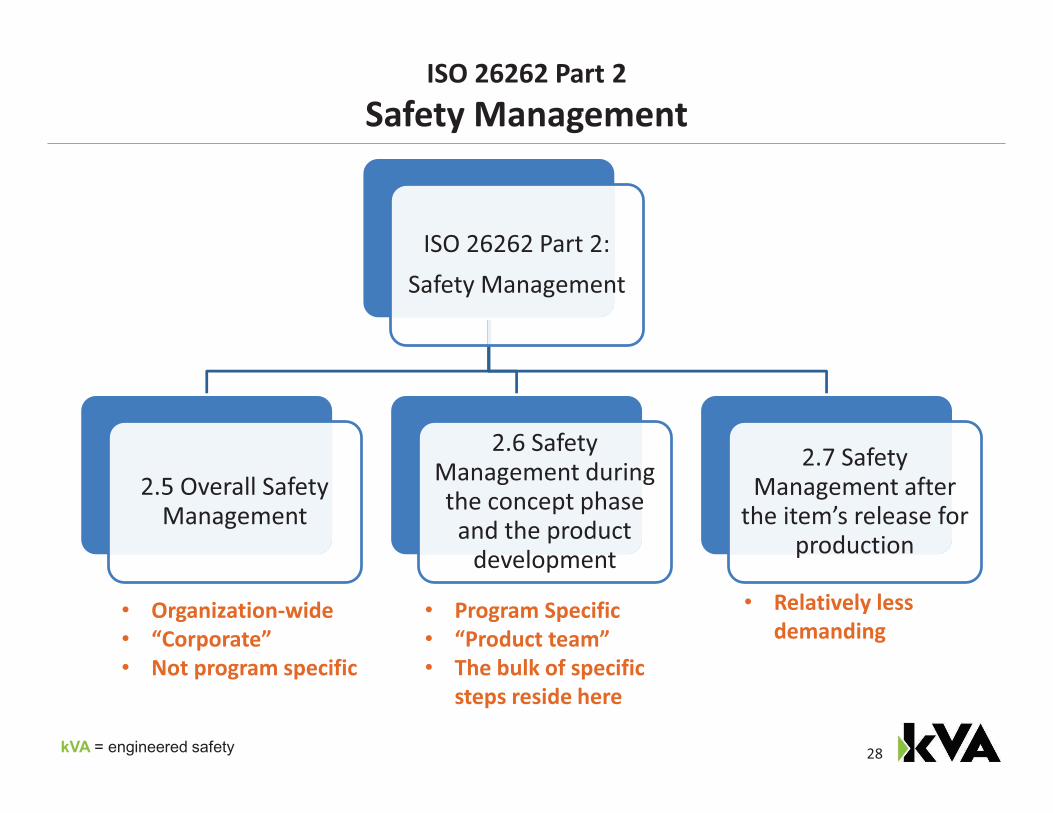
ISO 26262 Part 2:Safety Management
2.5 Overall Safety Management
2.6 Safety Management during the concept phase
and the product development
2.7 Safety Management after
the item’s release for production
• Organization-wide• “Corporate”• Not program specific
• Program Specific• “Product team”• The bulk of specific
steps reside here
• Relatively less demanding
kVA = engineered safety
Differences between ICE and xEV
kVA = engineered safety
Why are e-Powertrains different?
• Internal combustion engines (ICE) provide drive torque
� Electric powertrains provide drive torque
• ICEs provide braking torque
� Electric powertrains provide braking torque
Are we not the same?

kVA = engineered safety
One difference is how we dress…
Safety glasses
Hearing protectionHigh Voltage
rubber gloves
kVA = engineered safety
Traditional Powertrain – EGAS
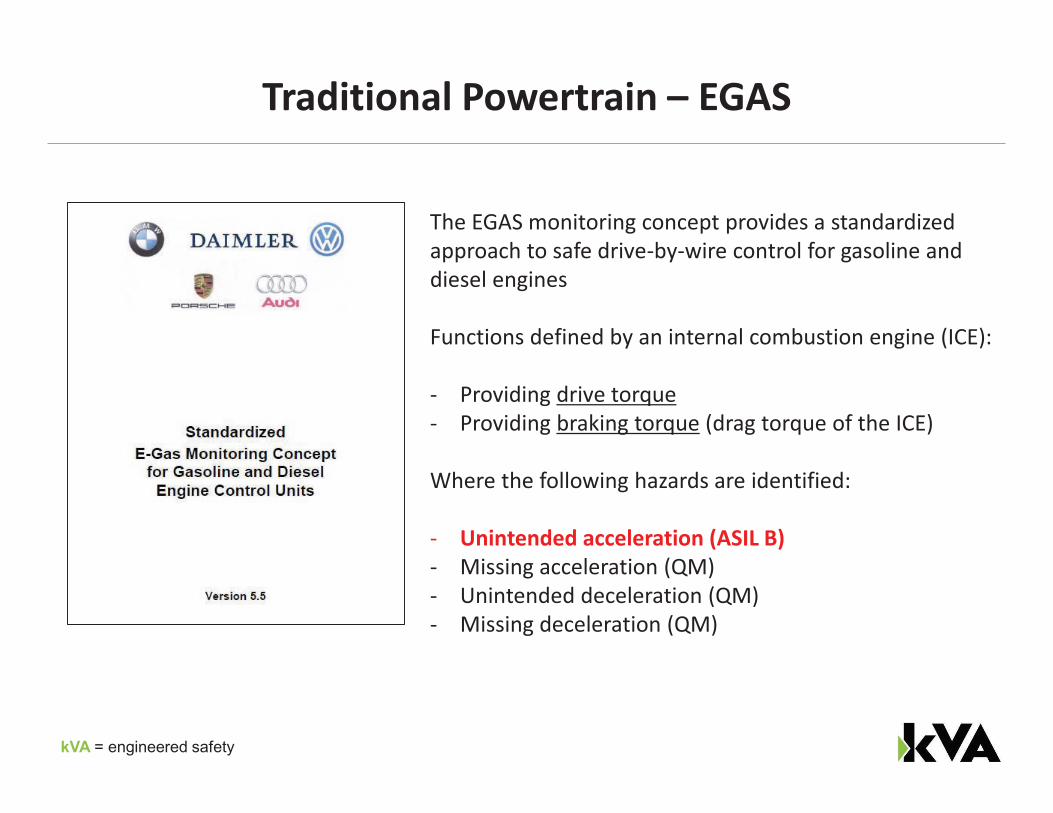
The EGAS monitoring concept provides a standardized approach to safe drive-by-wire control for gasoline and diesel engines
Functions defined by an internal combustion engine (ICE):
- Providing drive torque- Providing braking torque (drag torque of the ICE)
Where the following hazards are identified:
- Unintended acceleration (ASIL B)- Missing acceleration (QM)- Unintended deceleration (QM)- Missing deceleration (QM)
kVA = engineered safety
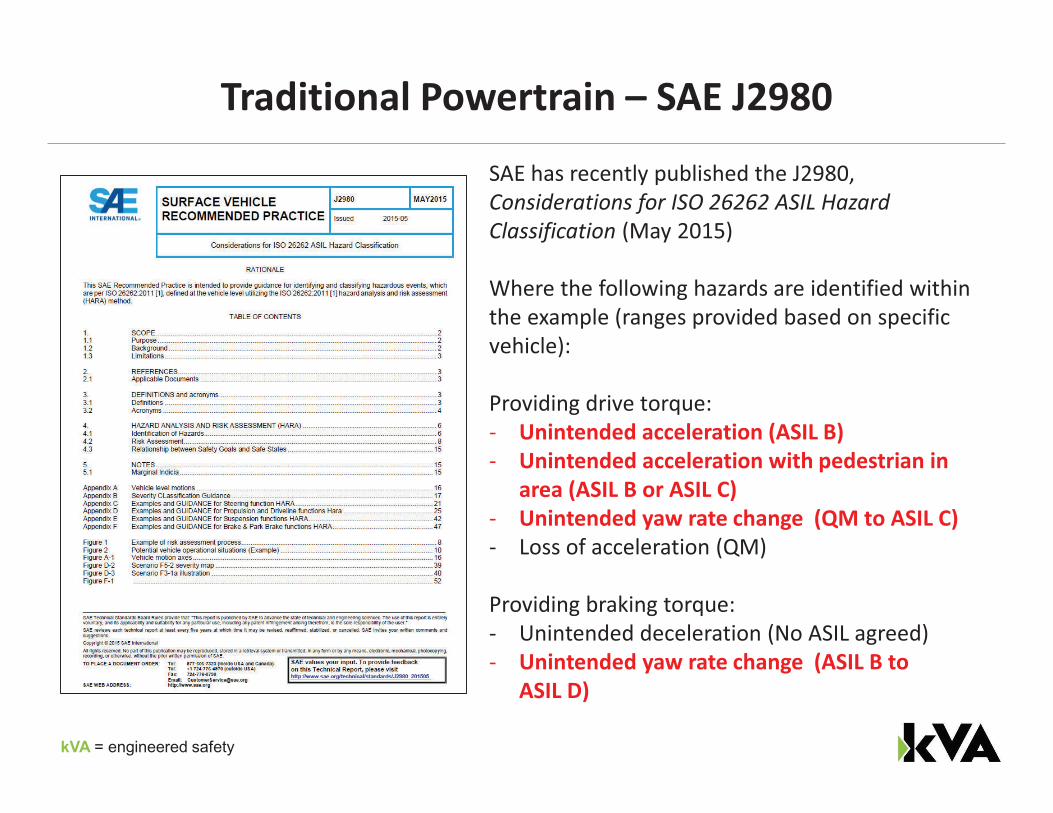
Traditional Powertrain – SAE J2980
SAE has recently published the J2980, Considerations for ISO 26262 ASIL Hazard Classification (May 2015)
Where the following hazards are identified within the example (ranges provided based on specific vehicle):
Providing drive torque:- Unintended acceleration (ASIL B)- Unintended acceleration with pedestrian in
area (ASIL B or ASIL C)- Unintended yaw rate change (QM to ASIL C)- Loss of acceleration (QM)
Providing braking torque:- Unintended deceleration (No ASIL agreed)- Unintended yaw rate change (ASIL B to
ASIL D)
kVA = engineered safety
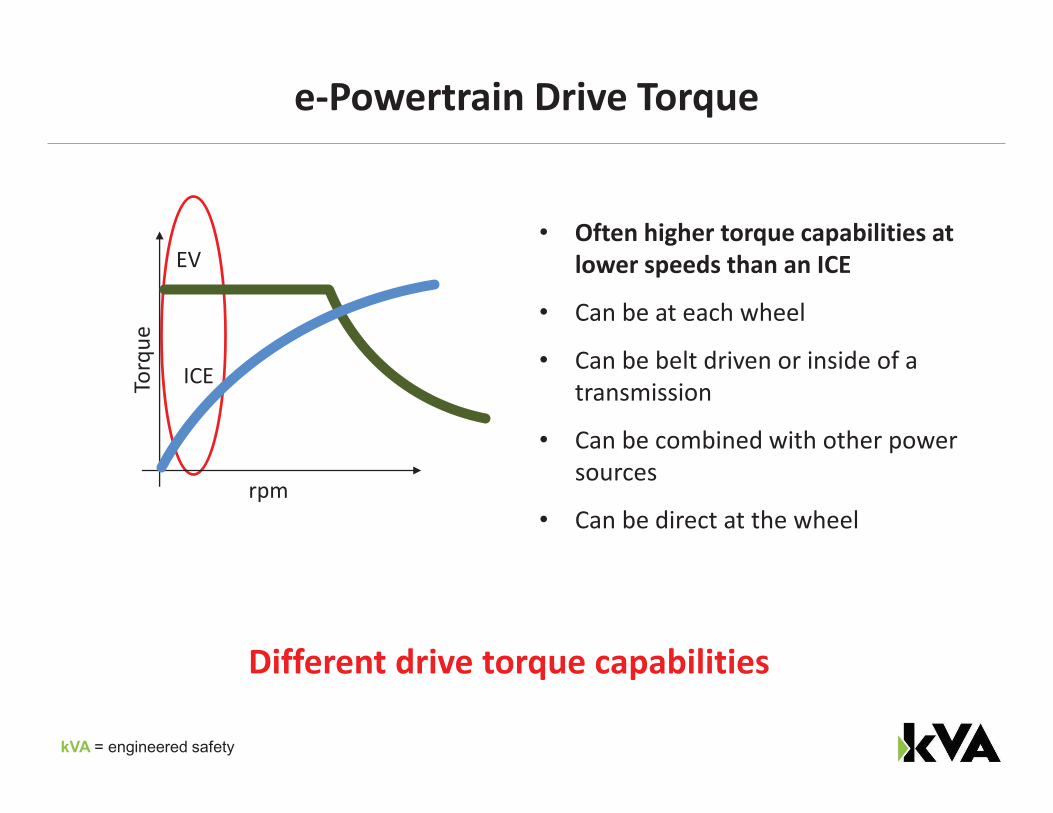
e-Powertrain Drive Torque
Different drive torque capabilities
• Often higher torque capabilities at lower speeds than an ICE
• Can be at each wheel
• Can be belt driven or inside of a transmission
• Can be combined with other power sources
• Can be direct at the wheel
EV
ICETorq
ue
rpm
kVA = engineered safety
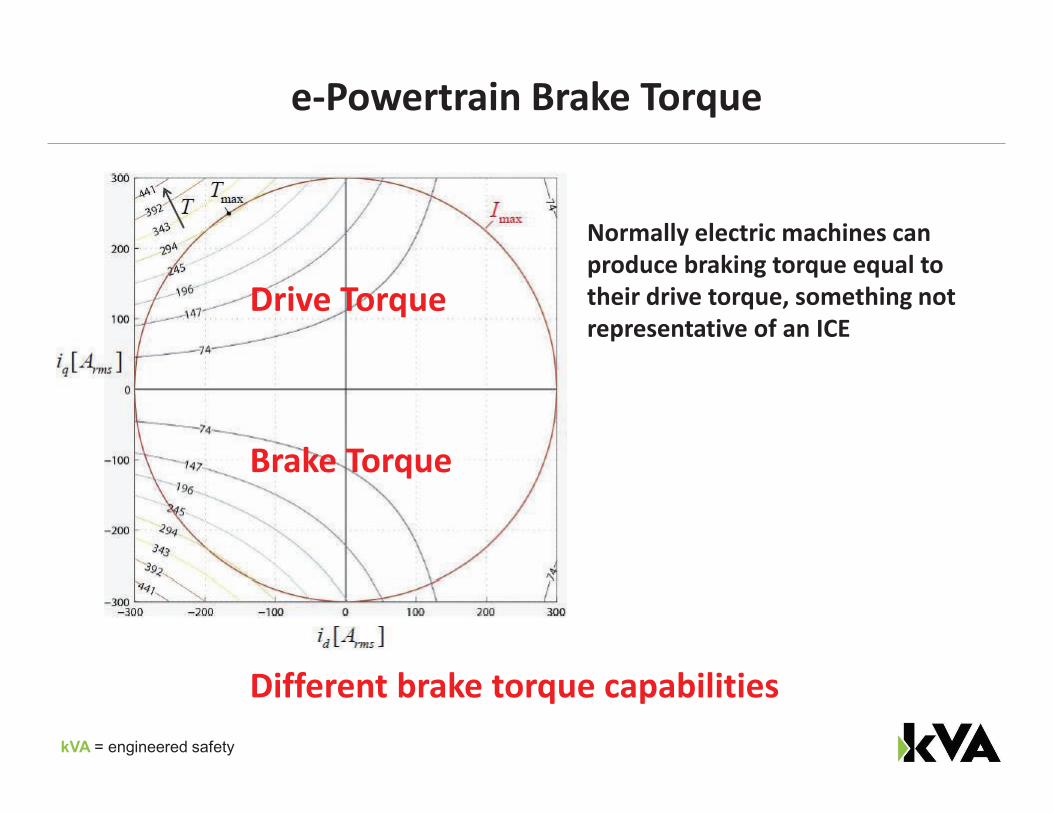
e-Powertrain Brake Torque
Different brake torque capabilities
Normally electric machines can produce braking torque equal to their drive torque, something not representative of an ICE
Drive Torque
Brake Torque
kVA = engineered safety
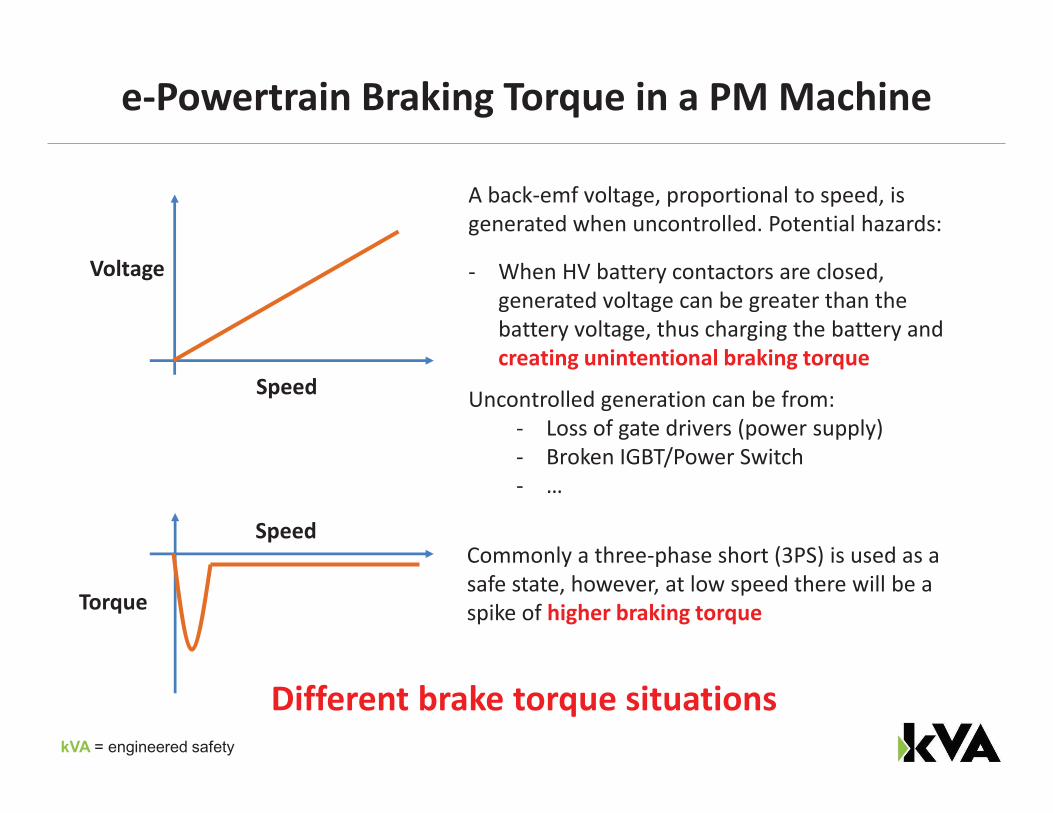
e-Powertrain Braking Torque in a PM Machine
Speed
Voltage
Torque
Speed
A back-emf voltage, proportional to speed, is generated when uncontrolled. Potential hazards:
- When HV battery contactors are closed, generated voltage can be greater than the battery voltage, thus charging the battery and creating unintentional braking torque
Uncontrolled generation can be from:- Loss of gate drivers (power supply)- Broken IGBT/Power Switch- …
Commonly a three-phase short (3PS) is used as a safe state, however, at low speed there will be a spike of higher braking torque
Different brake torque situations
kVA = engineered safety
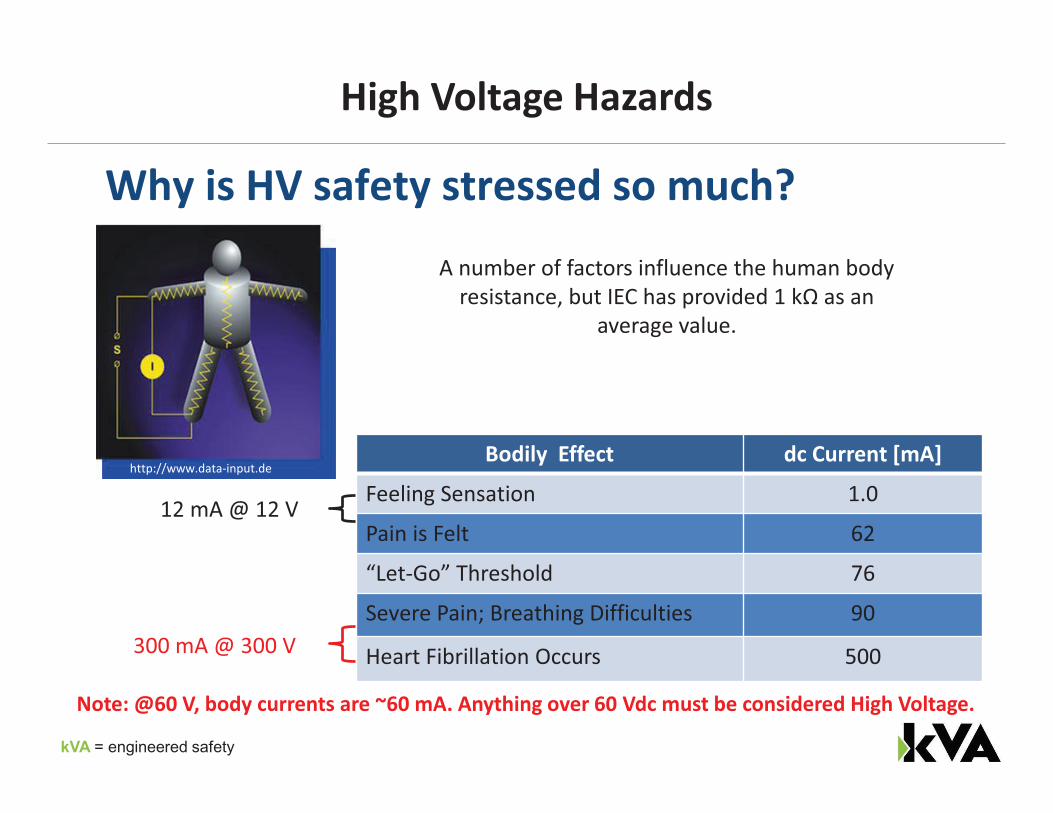
High Voltage Hazards
Bodily Effect dc Current [mA]
Feeling Sensation 1.0
Pain is Felt 62
“Let-Go” Threshold 76
Severe Pain; Breathing Difficulties 90
Heart Fibrillation Occurs 500
Why is HV safety stressed so much?
A number of factors influence the human body resistance, but IEC has provided 1 kΩ as an
average value.
12 mA @ 12 V
300 mA @ 300 V
http://www.data-input.de
Note: @60 V, body currents are ~60 mA. Anything over 60 Vdc must be considered High Voltage.
kVA = engineered safety
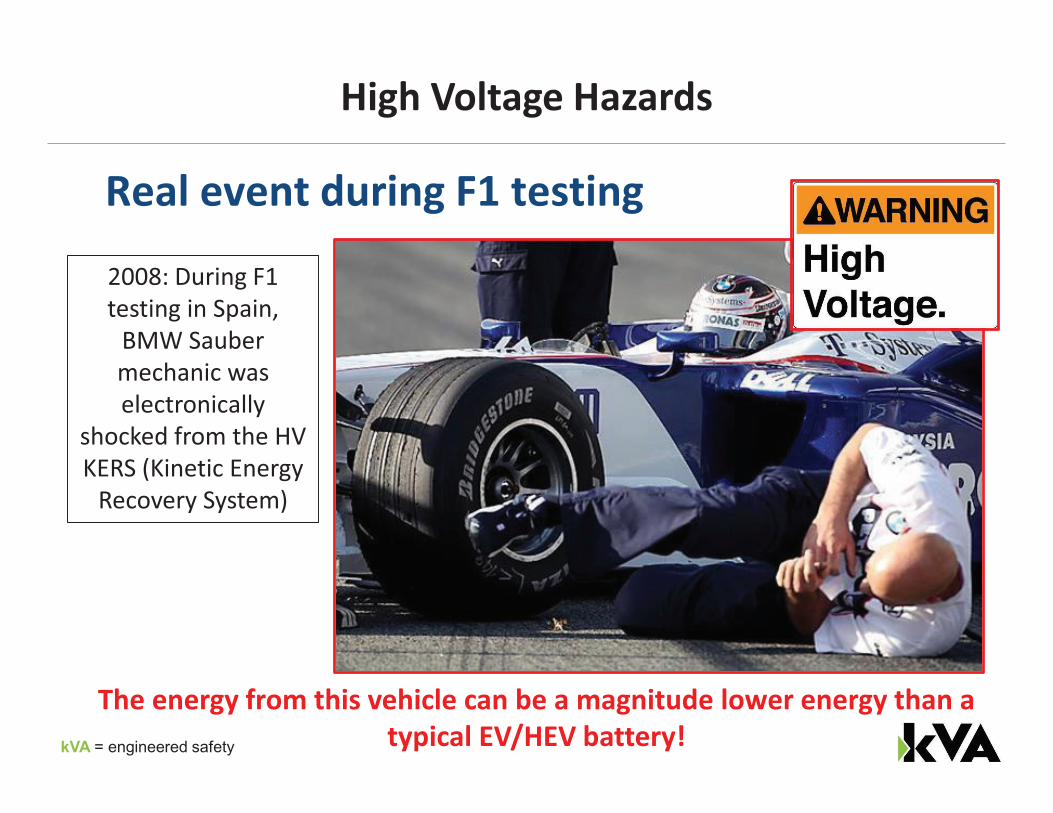
High Voltage Hazards
Real event during F1 testing
2008: During F1 testing in Spain,
BMW Saubermechanic was electronically
shocked from the HV KERS (Kinetic Energy
Recovery System)
The energy from this vehicle can be a magnitude lower energy than a typical EV/HEV battery!
kVA = engineered safety
High Voltage Hazards
• How can we protect against HV hazards?– Ground fault isolation detection– Interlock loops– Special connectors with sensing– Active discharge circuits– Control algorithms– …
They are all controlled by electronics
kVA = engineered safety
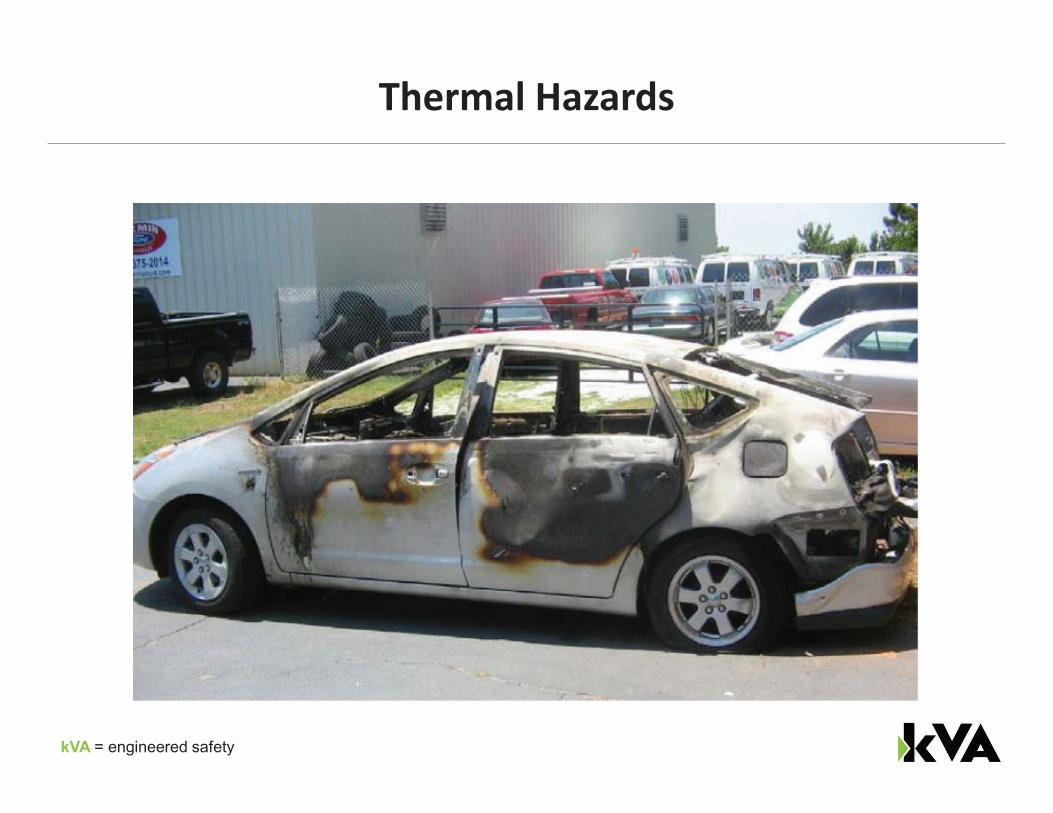
Thermal Hazards
kVA = engineered safety
Thermal Hazards
• How can we protect against thermal hazards?– Overcurrent detection– Temperature sensors and thermal modeling – Limp home strategies– Enclosures– …
Some are controlled by electronics
kVA = engineered safety
HARA
kVA = engineered safety
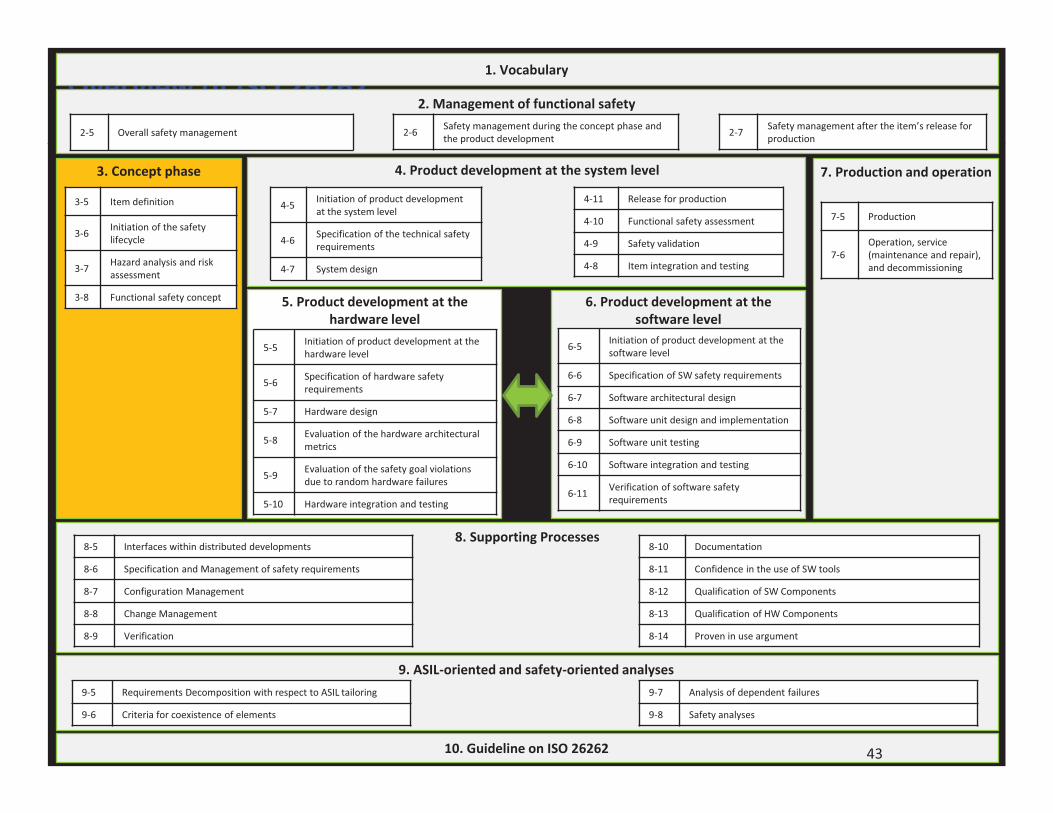
Structure of ISO 26262Overview of ISO 26262 m
8-5 Interfaces within distributed developments
8-6 Specification and Management of safety requirements
8-7 Configuration Management
8-8 Change Management
8-9 Verification
8-10 Documentation
8-11 Confidence in the use of SW tools
8-12 Qualification of SW Components
8-13 Qualification of HW Components
8-14 Proven in use argument
9-5 Requirements Decomposition with respect to ASIL tailoring
9-6 Criteria for coexistence of elements
9-7 Analysis of dependent failures
9-8 Safety analyses
2-5 Overall safety management 2-6 Safety management during the concept phase and the product development 2-7 Safety management after the item’s release for
production
2. Management of functional safety
1. Vocabulary
4. Product development at the system level 7. Production and operation3. Concept phase
5. Product development at the hardware level
6. Product development at the software level
8. Supporting Processes
9. ASIL-oriented and safety-oriented analyses
4-11 Release for production
4-10 Functional safety assessment
4-9 Safety validation
4-8 Item integration and testing
4-5 Initiation of product development at the system level
4-6 Specification of the technical safety requirements
4-7 System design
5-5 Initiation of product development at the hardware level
5-6 Specification of hardware safety requirements
5-7 Hardware design
5-8 Evaluation of the hardware architectural metrics
5-9 Evaluation of the safety goal violations due to random hardware failures
5-10 Hardware integration and testing
3-5 Item definition
3-6 Initiation of the safety lifecycle
3-7 Hazard analysis and risk assessment
3-8 Functional safety concept
7-5 Production
7-6Operation, service (maintenance and repair), and decommissioning
10. Guideline on ISO 26262 43
6-5 Initiation of product development at the software level
6-6 Specification of SW safety requirements
6-7 Software architectural design
6-8 Software unit design and implementation
6-9 Software unit testing
6-10 Software integration and testing
6-11 Verification of software safety requirements
kVA = engineered safety
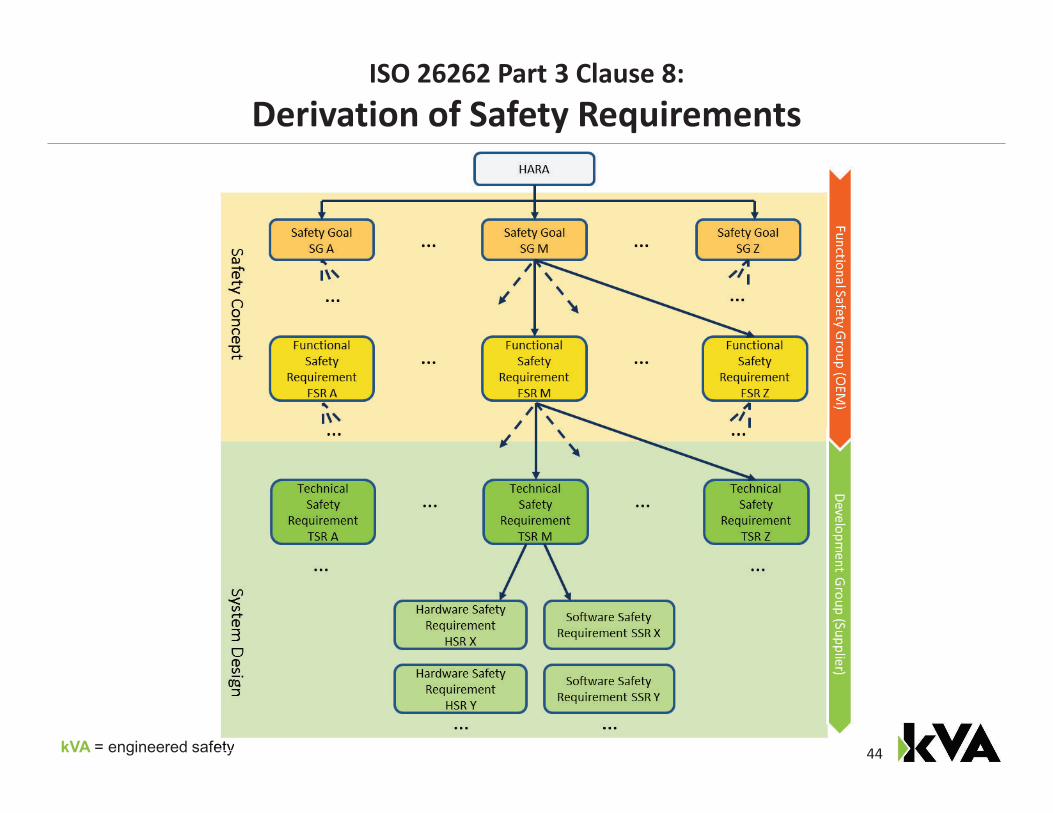
ISO 26262 Part 3 Clause 8: Derivation of Safety Requirements
ety 44
kVA = engineered safety
Transitioning to a Safe State
fault tolerant time interval � Time-span in which a fault (1.42) or faults can be present in a system (1.129) before a hazardous event (1.57) occurs.
(alternate: “the time-span in which the vehicle function can be stressed with faults before a hazardous event develops”)
fault reaction time � Time-span from the detection of a fault (1.42) to reaching the safe state (1.102).
eered safety
Fault Fault DetectionPossibleHazard
Normal Operation Safe State
45
kVA = engineered safety TÜV NORD Systems GmbH & Co. KG 46
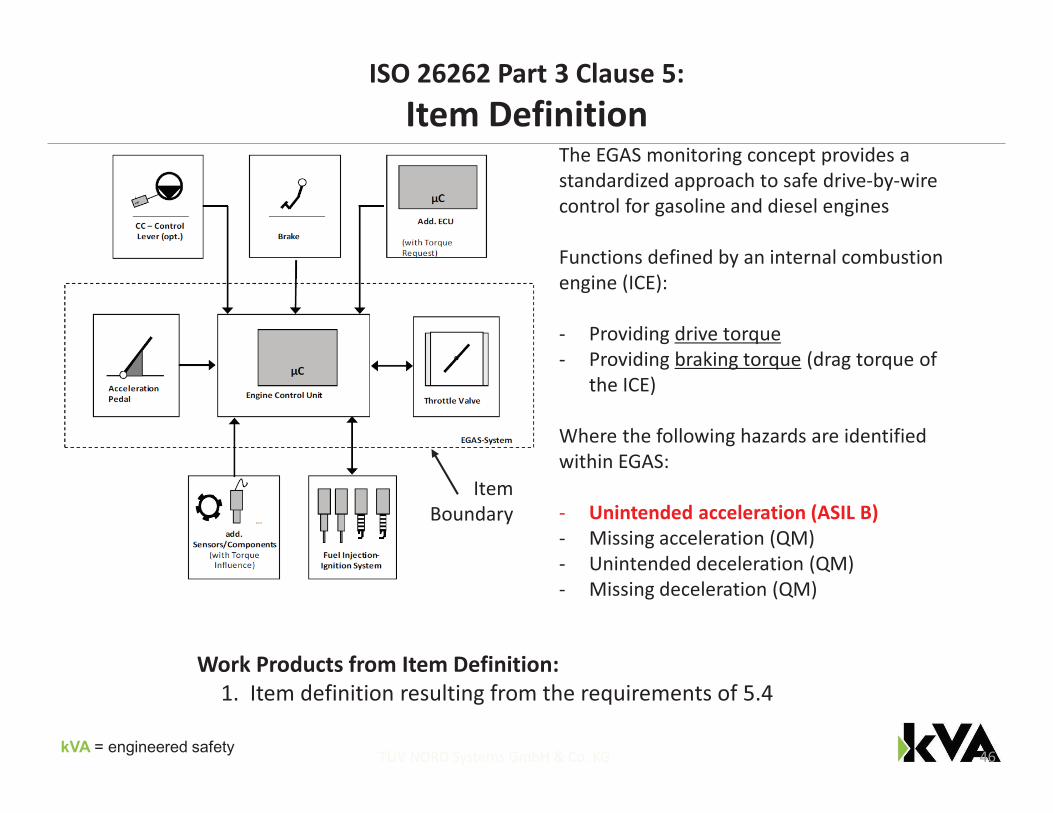
Work Products from Item Definition:1. Item definition resulting from the requirements of 5.4
Item Boundary
The EGAS monitoring concept provides a standardized approach to safe drive-by-wire control for gasoline and diesel engines
Functions defined by an internal combustion engine (ICE):
- Providing drive torque- Providing braking torque (drag torque of
the ICE)
Where the following hazards are identified within EGAS:
- Unintended acceleration (ASIL B)- Missing acceleration (QM)- Unintended deceleration (QM)- Missing deceleration (QM)
ISO 26262 Part 3 Clause 5:Item Definition
kVA = engineered safety
ISO 26262 Part 3 Clause 7:Hazard Analysis and Risk Assessment (HARA)
• HARA is a standardized approach to vehicle-level hazard classification
• HARA lists every combination of hazardous malfunction under every scenario (e.g.., road type, speed, driving situation, etc.)– Implication: typical HARA can easily grow to hundreds of lines
• HARA combines three concepts related to functional safety:– The SEVERITY (S) of the hazard– The EXPOSURE PROBABILITY (E) of the operational situations– The CONTROLLABILITY (C) of the hazard (e.g.., by the driver)
47
kVA = engineered safety
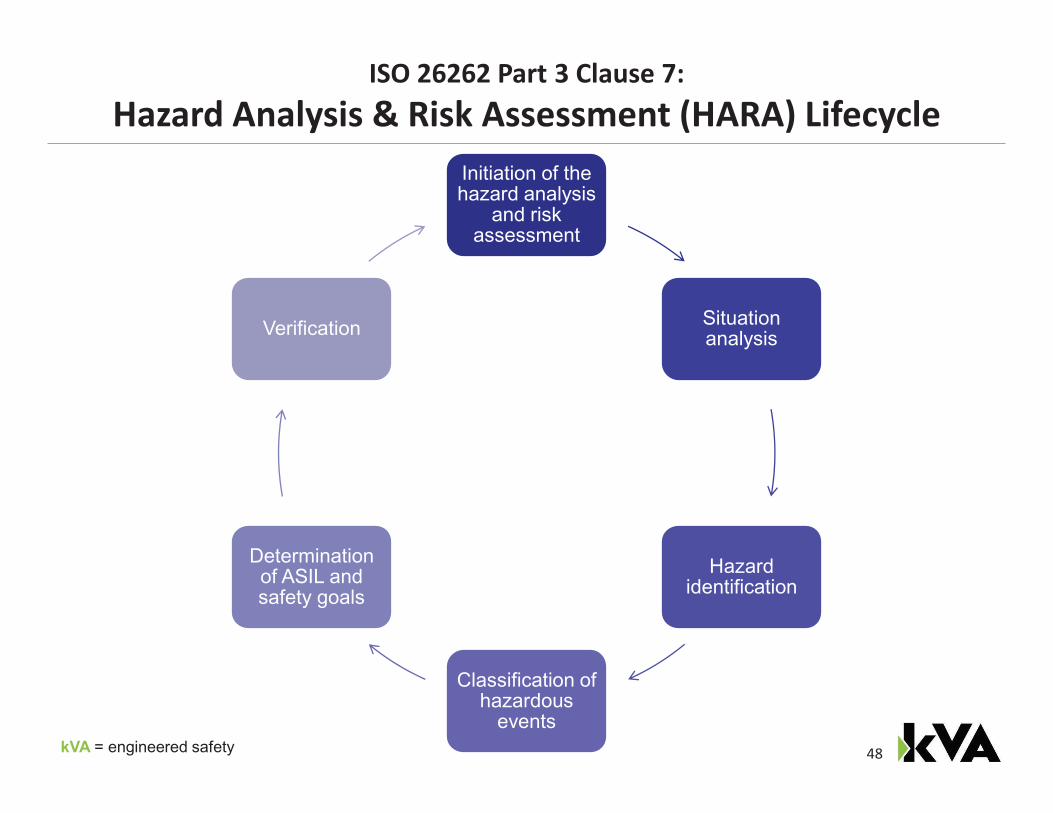
Initiation of the hazard analysis
and risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Hazard Analysis & Risk Assessment (HARA) Lifecycle
48
kVA = engineered safety
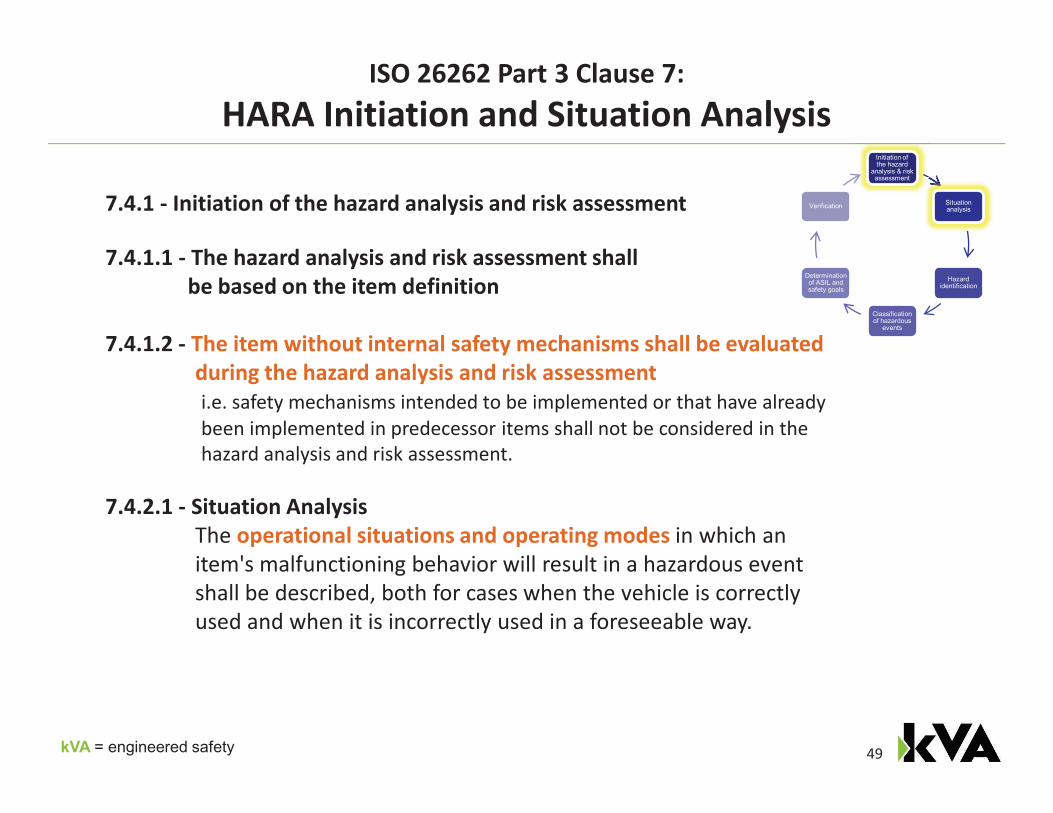
7.4.1 - Initiation of the hazard analysis and risk assessment
7.4.1.1 - The hazard analysis and risk assessment shall be based on the item definition
7.4.1.2 - The item without internal safety mechanisms shall be evaluated during the hazard analysis and risk assessmenti.e. safety mechanisms intended to be implemented or that have already been implemented in predecessor items shall not be considered in the hazard analysis and risk assessment.
7.4.2.1 - Situation AnalysisThe operational situations and operating modes in which an item's malfunctioning behavior will result in a hazardous event shall be described, both for cases when the vehicle is correctly used and when it is incorrectly used in a foreseeable way.
ISO 26262 Part 3 Clause 7: HARA Initiation and Situation Analysis
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
49
kVA = engineered safety
HARA attempts to answer the following questions:
• What can happen?
• How often can it happen?
• What are the effects, if it happens?
• Can the driver (or others) control it?
ISO 26262 Part 3 Clause 7: Hazard Identification
50
kVA = engineered safety
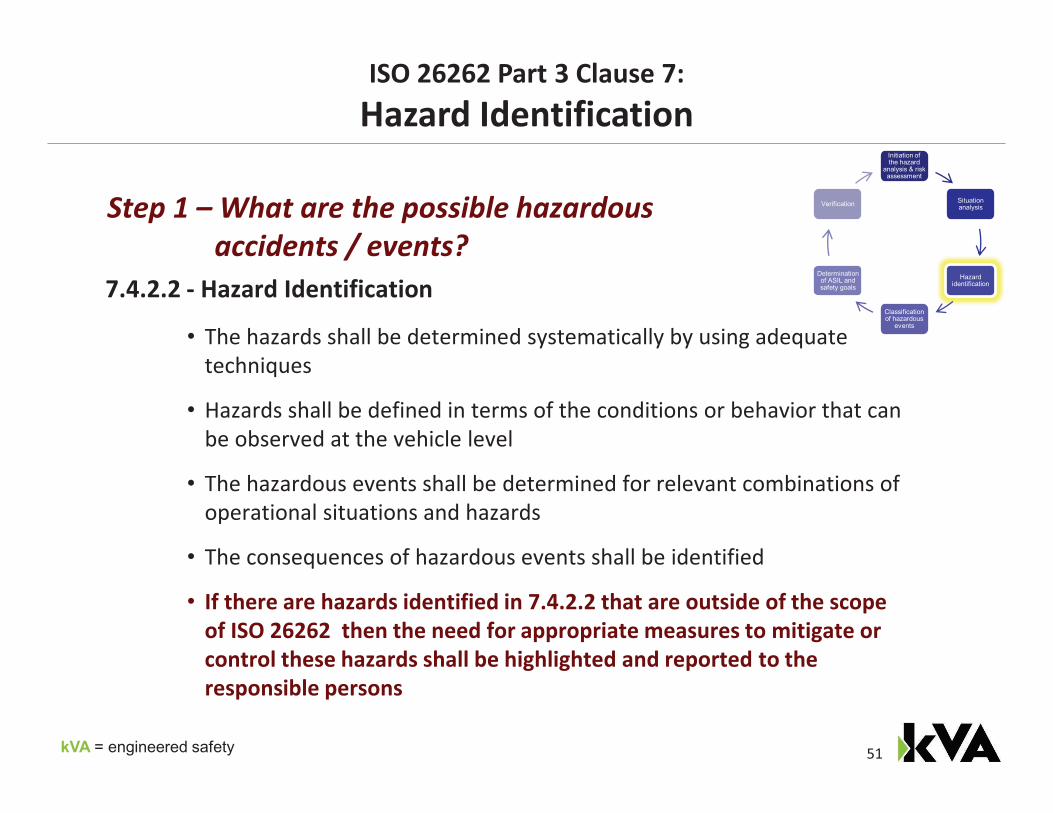
Step 1 – What are the possible hazardous accidents / events?
7.4.2.2 - Hazard Identification
• The hazards shall be determined systematically by using adequate techniques
• Hazards shall be defined in terms of the conditions or behavior that can be observed at the vehicle level
• The hazardous events shall be determined for relevant combinations of operational situations and hazards
• The consequences of hazardous events shall be identified
• If there are hazards identified in 7.4.2.2 that are outside of the scope of ISO 26262 then the need for appropriate measures to mitigate or control these hazards shall be highlighted and reported to the responsible persons
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Hazard Identification
51
kVA = engineered safety
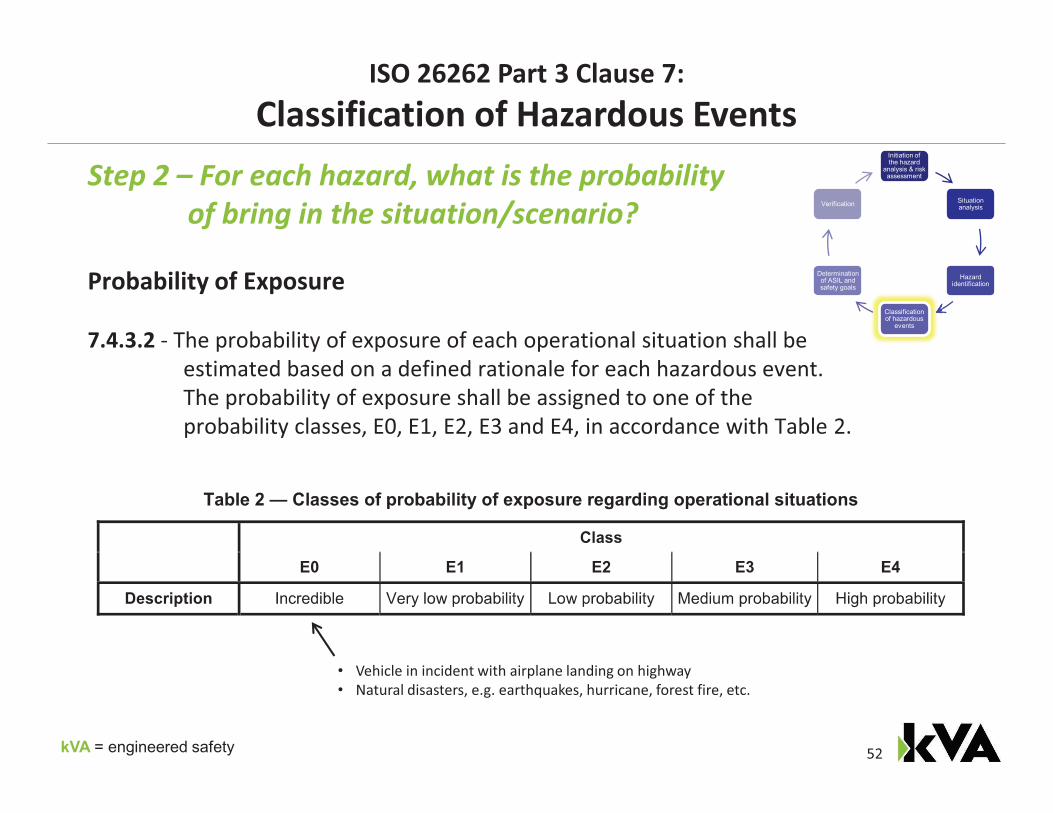
Probability of Exposure
7.4.3.2 - The probability of exposure of each operational situation shall be estimated based on a defined rationale for each hazardous event. The probability of exposure shall be assigned to one of the probability classes, E0, E1, E2, E3 and E4, in accordance with Table 2.
Step 2 – For each hazard, what is the probabilityof bring in the situation/scenario?
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Classification of Hazardous Events
52
• Vehicle in incident with airplane landing on highway• Natural disasters, e.g. earthquakes, hurricane, forest fire, etc.
kVA = engineered safety
Severity
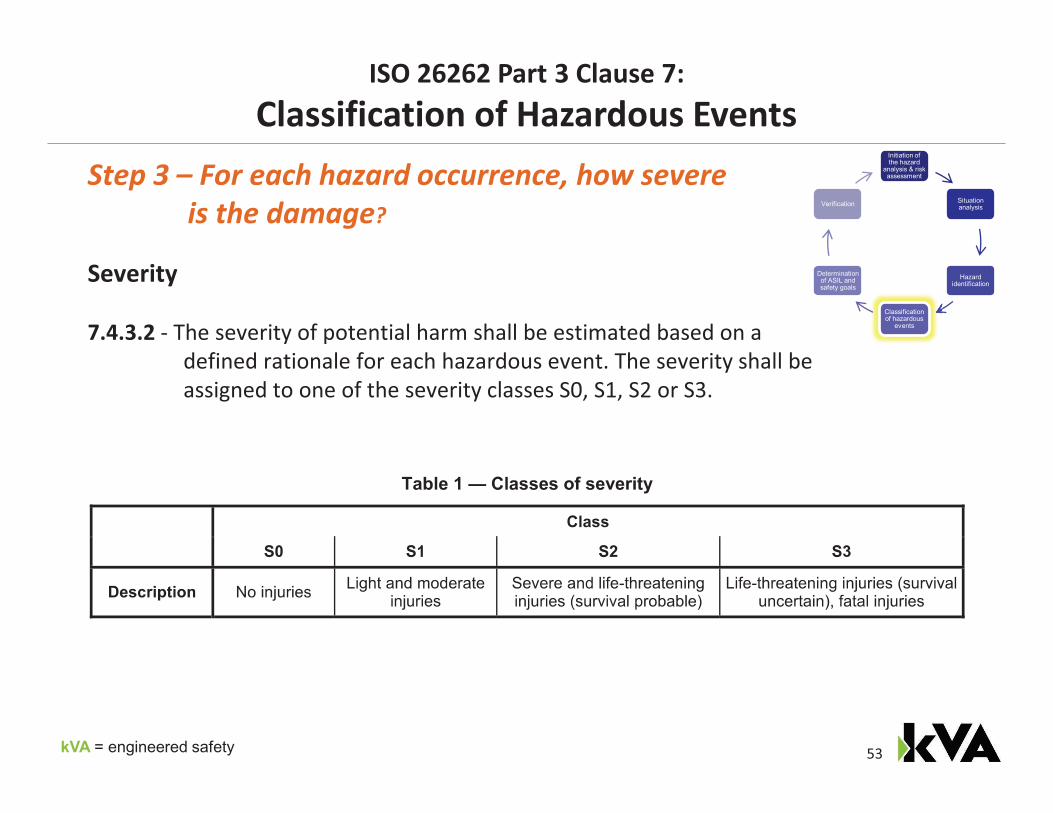
7.4.3.2 - The severity of potential harm shall be estimated based on a defined rationale for each hazardous event. The severity shall be assigned to one of the severity classes S0, S1, S2 or S3.
Step 3 – For each hazard occurrence, how severeis the damage?
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Classification of Hazardous Events
53
kVA = engineered safety
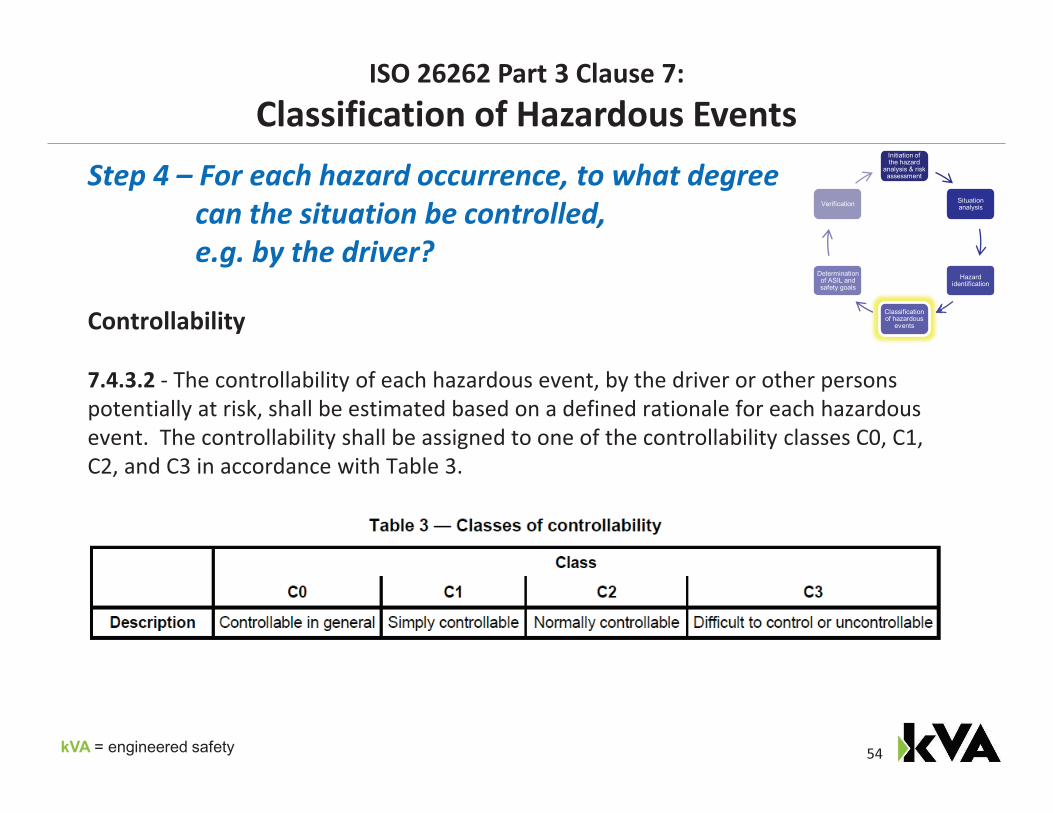
Controllability
7.4.3.2 - The controllability of each hazardous event, by the driver or other persons potentially at risk, shall be estimated based on a defined rationale for each hazardous event. The controllability shall be assigned to one of the controllability classes C0, C1, C2, and C3 in accordance with Table 3.
Step 4 – For each hazard occurrence, to what degree can the situation be controlled, e.g. by the driver?
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Classification of Hazardous Events
54
kVA = engineered safety
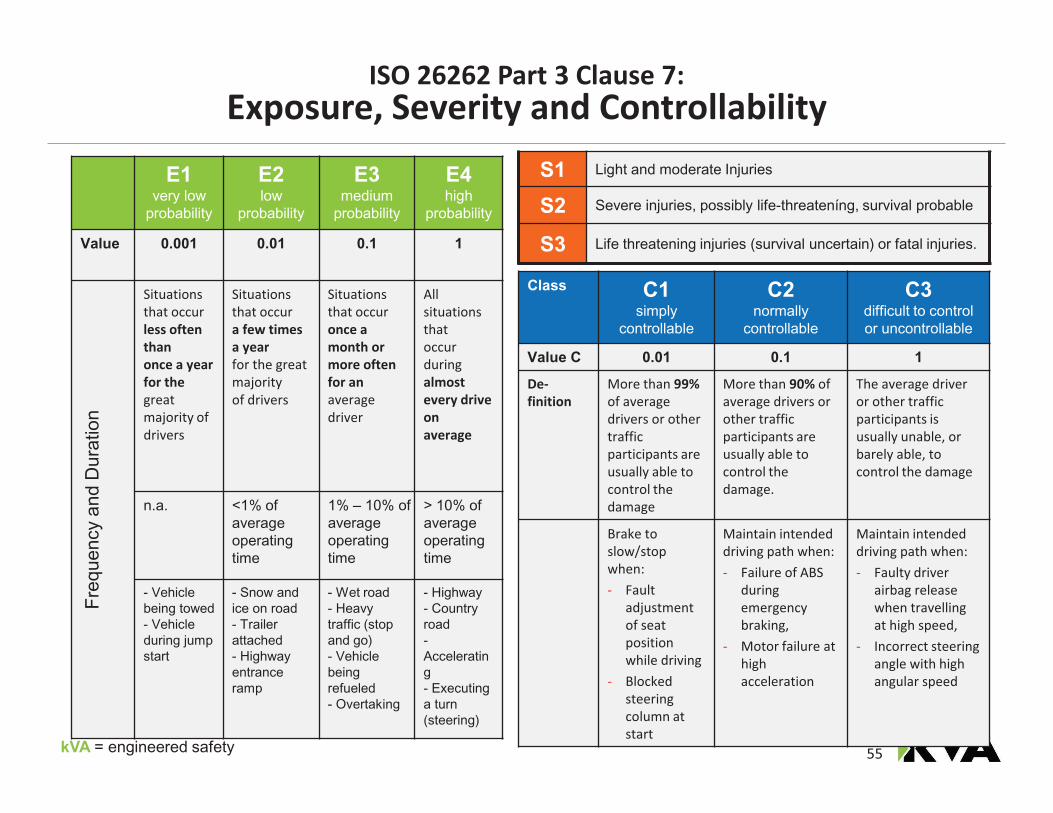
E1very low
probability
E2low
probability
E3medium
probability
E4high
probability
Value 0.001 0.01 0.1 1
Fre
quen
cy a
nd D
urat
ion
Situations that occurless often thanonce a year for thegreat majority ofdrivers
Situations that occura few times a yearfor the great majorityof drivers
Situations that occuronce a month ormore often for anaverage driver
All situations thatoccur during almostevery drive onaverage
n.a. <1% of average operating time
1% – 10% of average operating time
> 10% of average operating time
- Vehicle being towed- Vehicle during jump start
- Snow and ice on road- Trailer attached- Highway entranceramp
- Wet road- Heavy traffic (stop and go)- Vehicle beingrefueled- Overtaking
- Highway- Country road-Accelerating- Executing a turn (steering)
S1 Light and moderate Injuries
S2 Severe injuries, possibly life-threateníng, survival probable
S3 Life threatening injuries (survival uncertain) or fatal injuries.
Class C1simply
controllable
C2normally
controllable
C3difficult to control or uncontrollable
Value C 0.01 0.1 1
De-finition
More than 99%of average drivers or other traffic participants are usually able to control the damage
More than 90% of average drivers or other traffic participants are usually able to control the damage.
The average driver or other traffic participants is usually unable, or barely able, to control the damage
Brake to slow/stop when:- Fault
adjustment of seat position while driving
- Blocked steering column at start
Maintain intended driving path when: - Failure of ABS
during emergency braking,
- Motor failure at high acceleration
Maintain intended driving path when: - Faulty driver
airbag release when travelling at high speed,
- Incorrect steering angle with high angular speed
ISO 26262 Part 3 Clause 7: Exposure, Severity and Controllability
55
kVA = engineered safety
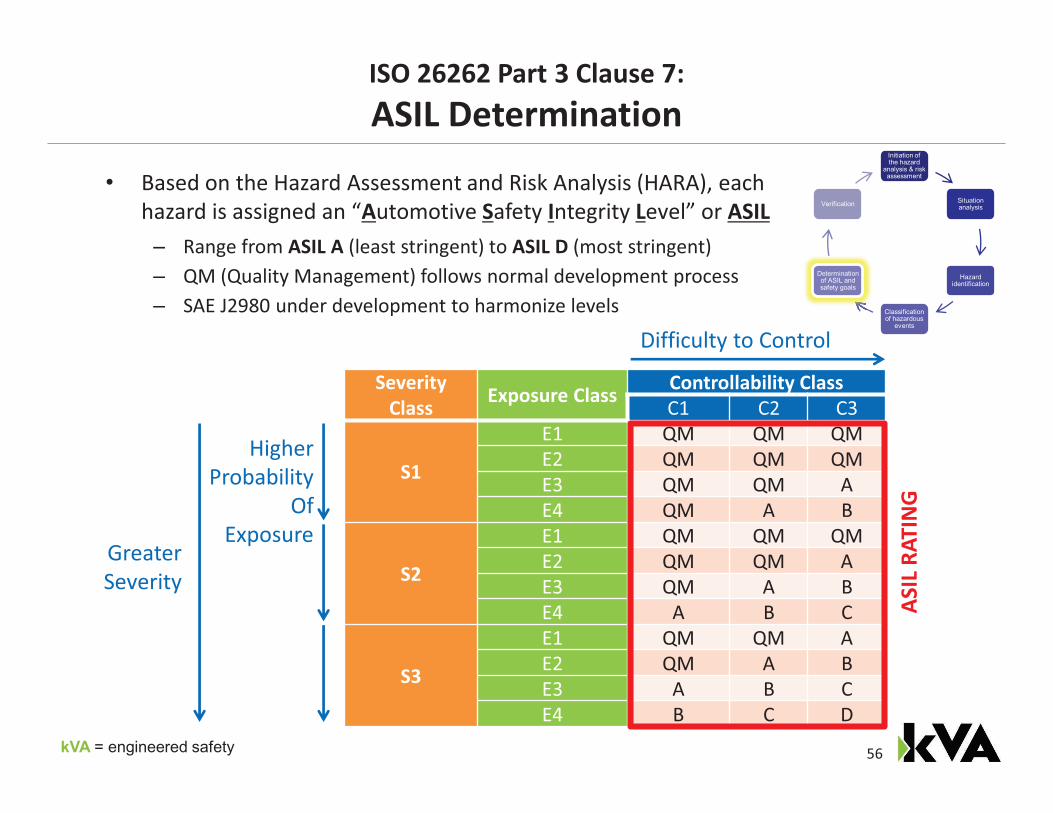
• Based on the Hazard Assessment and Risk Analysis (HARA), each hazard is assigned an “Automotive Safety Integrity Level” or ASIL– Range from ASIL A (least stringent) to ASIL D (most stringent) – QM (Quality Management) follows normal development process– SAE J2980 under development to harmonize levels
Severity Class Exposure Class Controllability Class
C1 C2 C3
S1
E1 QM QM QME2 QM QM QME3 QM QM AE4 QM A B
S2
E1 QM QM QME2 QM QM AE3 QM A BE4 A B C
S3
E1 QM QM AE2 QM A BE3 A B CE4 B C D
Difficulty to Control
Higher Probability
OfExposure
Greater Severity
ASIL
RAT
ING
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: ASIL Determination
56
kVA = engineered safety
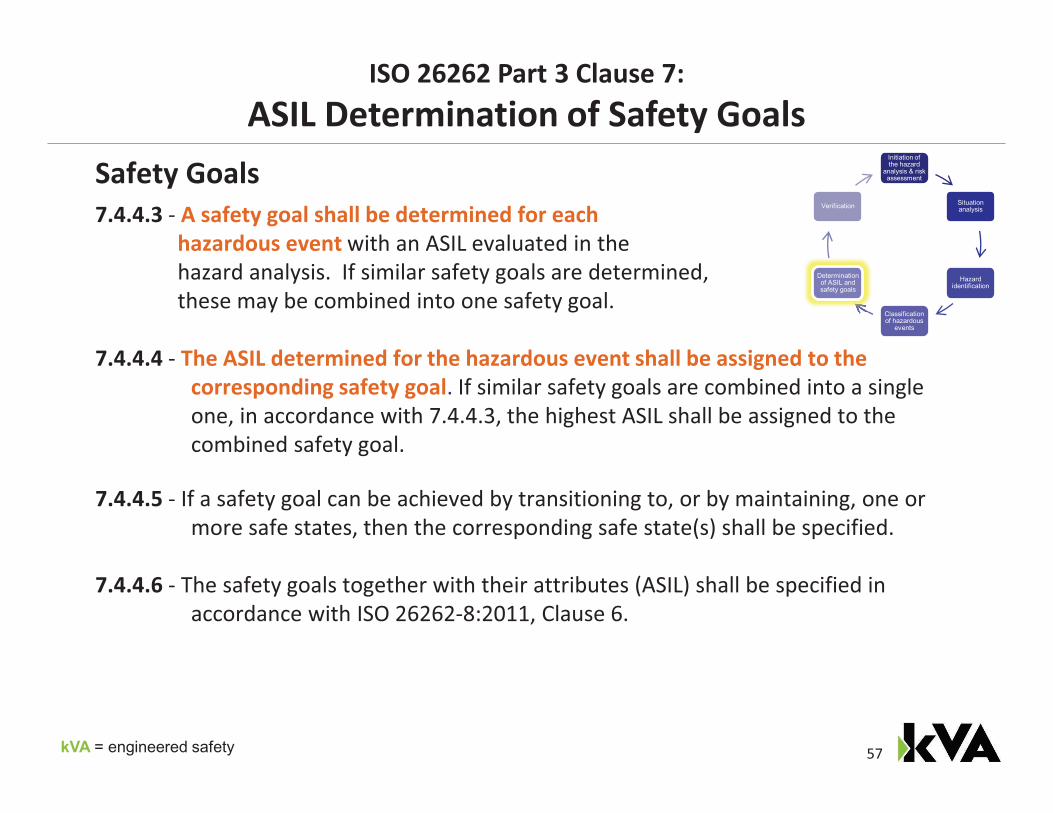
7.4.4.3 - A safety goal shall be determined for eachhazardous event with an ASIL evaluated in the hazard analysis. If similar safety goals are determined,these may be combined into one safety goal.
7.4.4.4 - The ASIL determined for the hazardous event shall be assigned to the corresponding safety goal. If similar safety goals are combined into a single one, in accordance with 7.4.4.3, the highest ASIL shall be assigned to the combined safety goal.
7.4.4.5 - If a safety goal can be achieved by transitioning to, or by maintaining, one or more safe states, then the corresponding safe state(s) shall be specified.
7.4.4.6 - The safety goals together with their attributes (ASIL) shall be specified in accordance with ISO 26262-8:2011, Clause 6.
Safety GoalsInitiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: ASIL Determination of Safety Goals
57
kVA = engineered safety
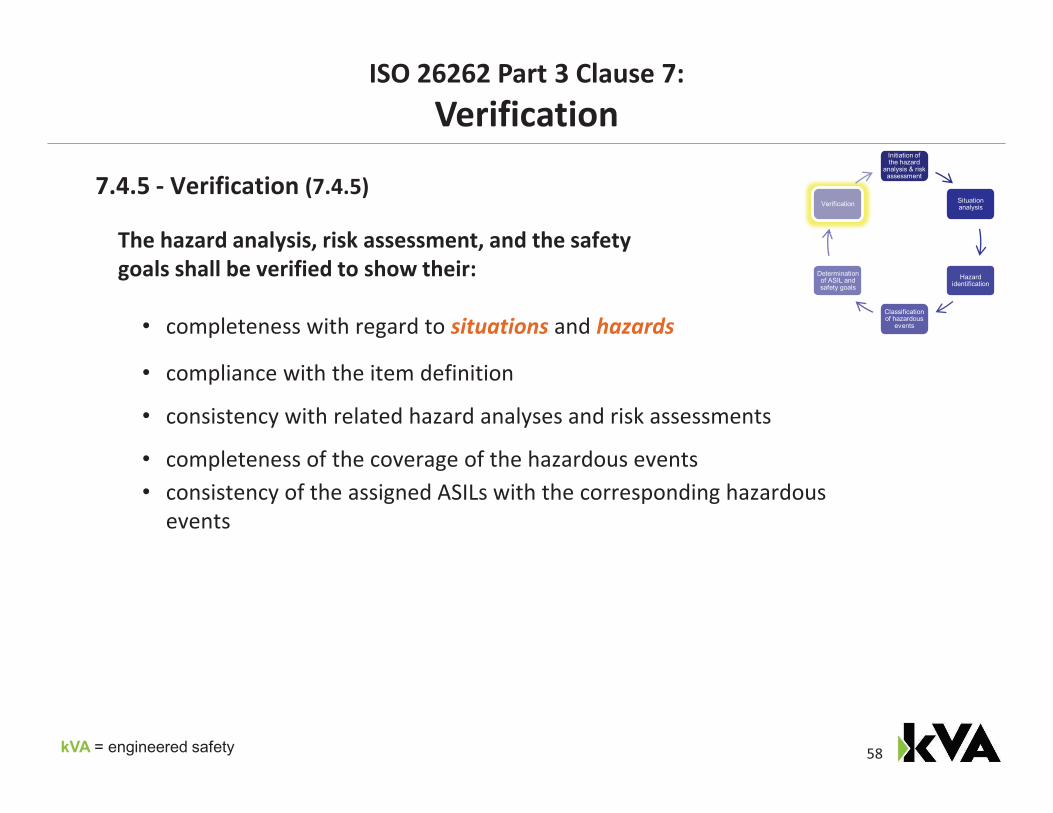
7.4.5 - Verification (7.4.5)
The hazard analysis, risk assessment, and the safety goals shall be verified to show their:
• completeness with regard to situations and hazards
• compliance with the item definition
• consistency with related hazard analyses and risk assessments
• completeness of the coverage of the hazardous events• consistency of the assigned ASILs with the corresponding hazardous
events
Initiation of the hazard
analysis & risk assessment
Situation analysis
Hazard identification
Classification of hazardous
events
Determination of ASIL and safety goals
Verification
ISO 26262 Part 3 Clause 7: Verification
58
kVA = engineered safety
Exercise: HARA
kVA = engineered safety
Initiation of the hazard analysis
and risk assessment
Situationanalysis
Hazardidentification
Classification of hazardous
events
Determinationof ASIL and safety goals
Verification
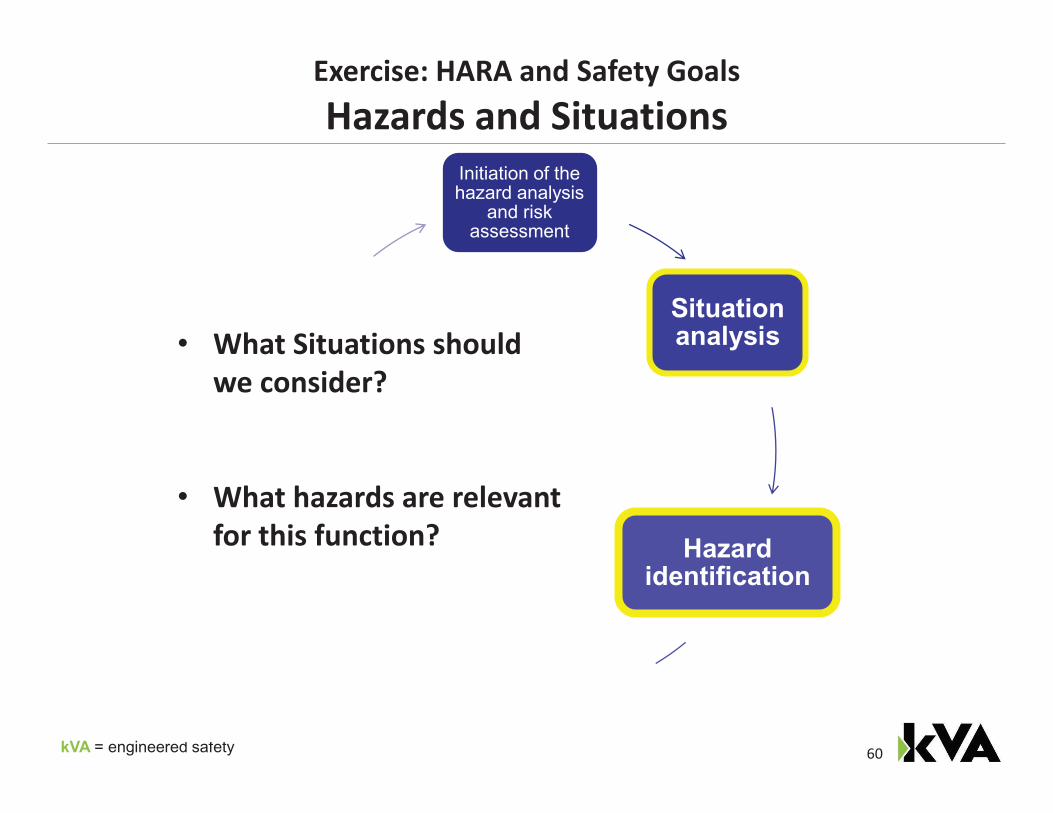
Exercise: HARA and Safety GoalsHazards and Situations
60
• What Situations should we consider?
• What hazards are relevant for this function?
kVA = engineered safety
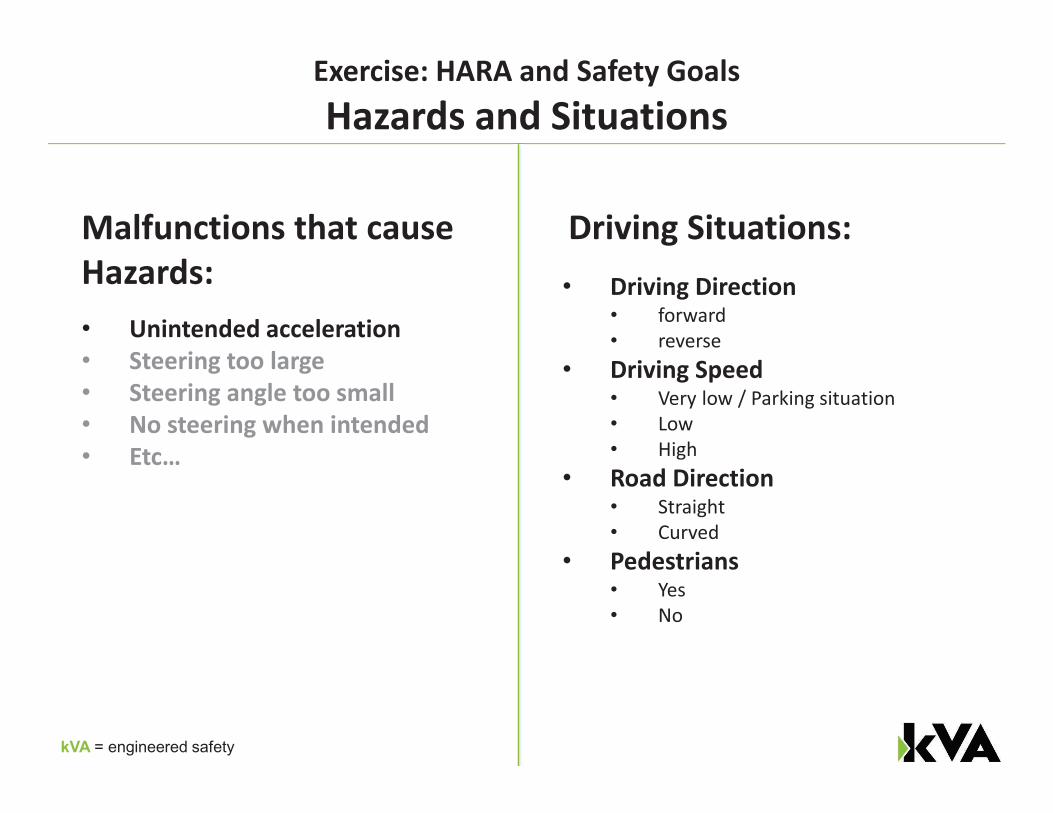
Exercise: HARA and Safety GoalsHazards and Situations
Malfunctions that cause Hazards:
Driving Situations:
• Unintended acceleration• Steering too large• Steering angle too small• No steering when intended• Etc…
• Driving Direction• forward• reverse
• Driving Speed• Very low / Parking situation• Low• High
• Road Direction• Straight• Curved
• Pedestrians• Yes• No
kVA = engineered safety
Exercise: HARA and Safety GoalsSafety Goals Guidelines
• A safety goal often takes the form of “avoiding” or “preventing” a hazard or malfunction from the HARA
• Safety Goals should specify an associated SAFE STATE if applicable
• Safety Goals are associated with hazards:�A Safety Goal inherits the highest ASIL of the hazard to which it is
associated.�Example: if a hazard is rated ASIL D, then the safety goal associated
with that hazard must be rated ASIL D.
kVA = engineered safety
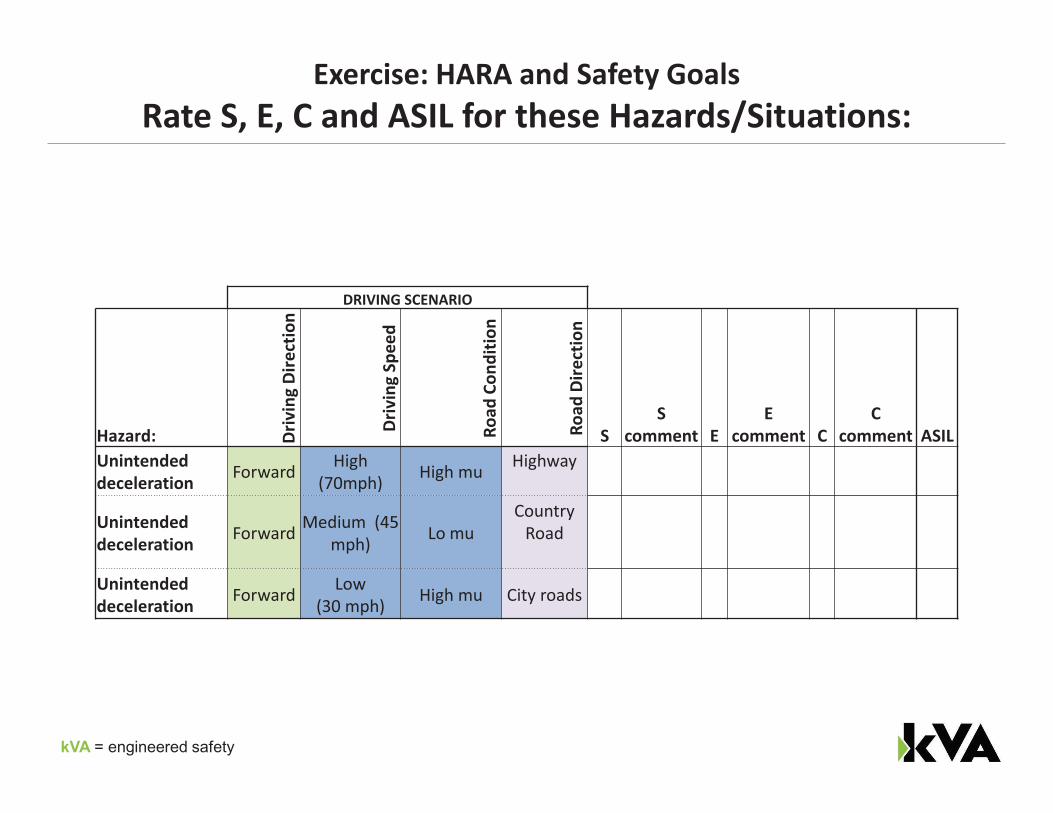
Exercise: HARA and Safety GoalsRate S, E, C and ASIL for these Hazards/Situations:
DRIVING SCENARIO
Hazard: Driv
ing
Dire
ctio
n
Driv
ing
Spee
d
Road
Con
ditio
n
Road
Dire
ctio
n
S S
comment EE
comment CC
comment ASILUnintended deceleration Forward High
(70mph) High mu Highway
Unintended deceleration Forward Medium (45
mph) Lo muCountry
Road
Unintended deceleration Forward Low
(30 mph) High mu City roads
kVA = engineered safety
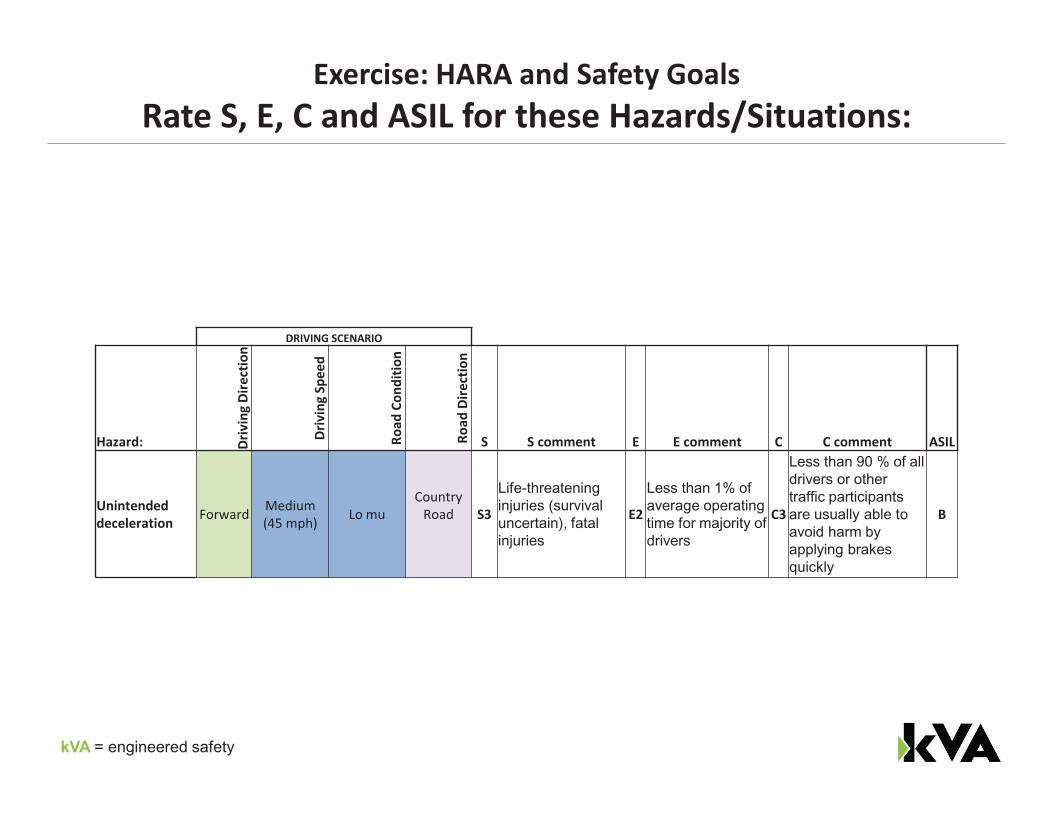
Exercise: HARA and Safety GoalsRate S, E, C and ASIL for these Hazards/Situations:
DRIVING SCENARIO
Hazard: Driv
ing
Dire
ctio
n
Driv
ing
Spee
d
Road
Con
ditio
n
Road
Dire
ctio
nS S comment E E comment C C comment ASIL
Unintended deceleration Forward Medium
(45 mph) Lo muCountry
Road S3
Life-threatening injuries (survival uncertain), fatal injuries
E2
Less than 1% of average operating time for majority ofdrivers
C3
Less than 90 % of alldrivers or other traffic participants are usually able to avoid harm by applying brakes quickly
B
kVA = engineered safety
Exercise: HARA and Safety GoalsRate S, E, C and ASIL for these Hazards/Situations:
DRIVING SCENARIO
Hazard: Driv
ing
Dire
ctio
n
Driv
ing
Spee
d
Road
Co
nditi
on
Road
D
irect
ion
S S comment E E comment C C comment ASIL
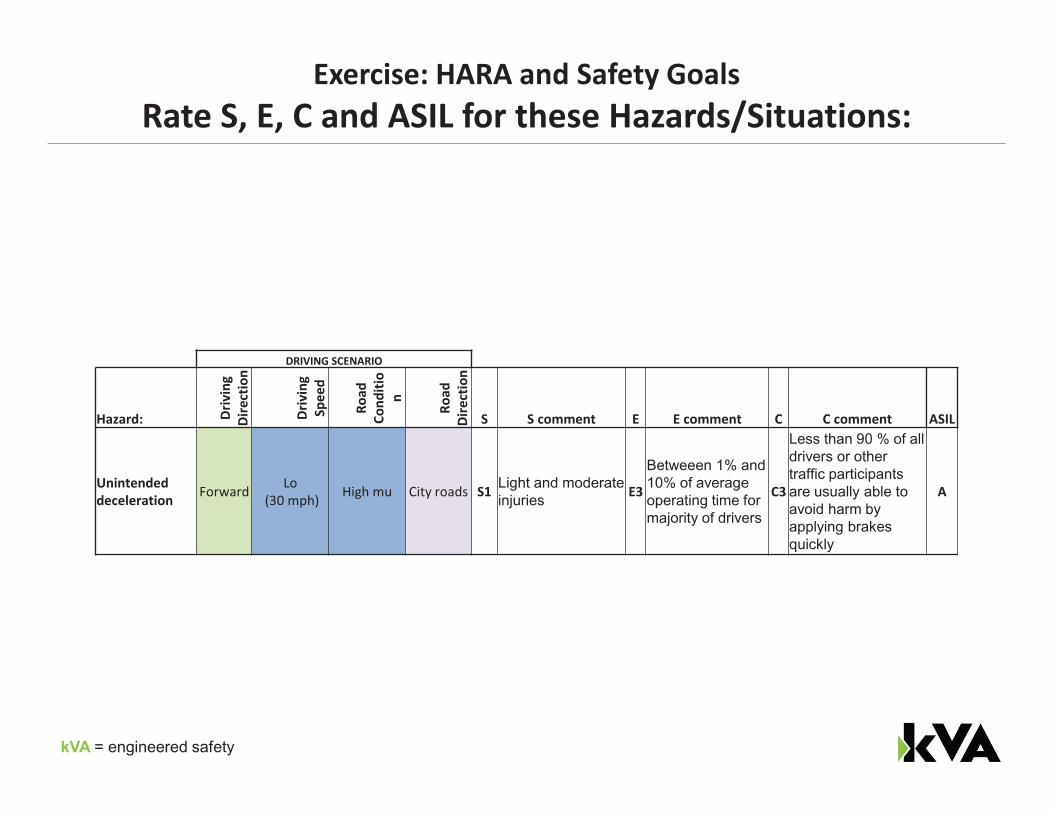
Unintended deceleration Forward Lo
(30 mph) High mu City roads S1 Light and moderateinjuries
E3
Betweeen 1% and 10% of average operating time for majority of drivers
C3
Less than 90 % of alldrivers or other traffic participants are usually able to avoid harm by applying brakes quickly
A
kVA = engineered safety
Exercise: HARA and Safety GoalsRate S, E, C and ASIL for these Hazards/Situations:
DRIVING SCENARIO
Hazard:
Driv
ing
Dire
ctio
n
Driv
ing
Spee
d
Road
Con
ditio
n
Road
Dire
ctio
n
S S comment E E comment C C comment ASIL
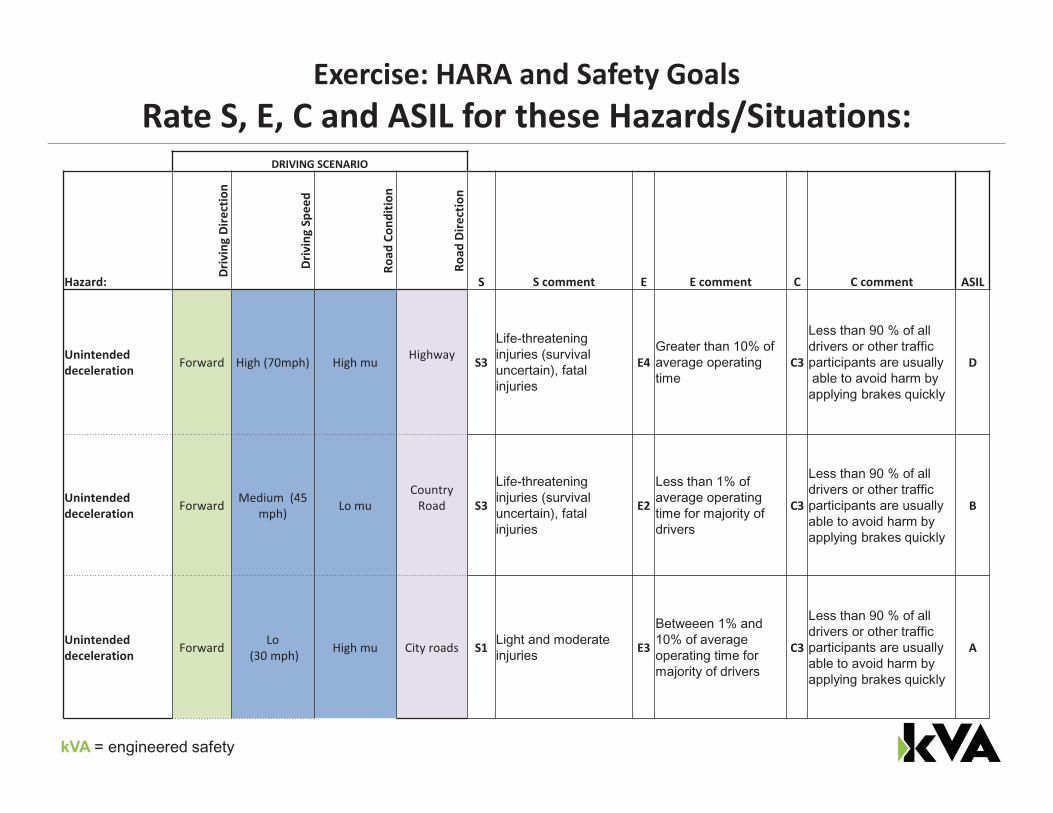
Unintended deceleration Forward High (70mph) High mu Highway S3
Life-threatening injuries (survival uncertain), fatal injuries
E4Greater than 10% of average operating time
C3
Less than 90 % of all drivers or other traffic participants are usuallyable to avoid harm by applying brakes quickly
D
Unintended deceleration Forward Medium (45
mph) Lo muCountry
Road S3
Life-threatening injuries (survival uncertain), fatal injuries
E2
Less than 1% of average operating time for majority of drivers
C3
Less than 90 % of all drivers or other traffic participants are usually able to avoid harm by applying brakes quickly
B
Unintended deceleration Forward Lo
(30 mph) High mu City roads S1 Light and moderate injuries
E3
Betweeen 1% and 10% of average operating time for majority of drivers
C3
Less than 90 % of all drivers or other traffic participants are usually able to avoid harm by applying brakes quickly
A
kVA = engineered safety
Exercise: HARA and Safety GoalsSafety goal, Safe state and ASIL
What is the safety goal:
What is the safe state:
What is the ASIL assigned to this safety goal:
kVA = engineered safety
HAZARD: Unintended decelerationSAFETY GOAL:
SAFE STATE:
Q: What is the ASIL assigned to this safety goal?
Exercise: HARA and Safety GoalsDefine Safety Goals for Each of these Hazards:
Unintended deceleration shall be avoided
Limited or No brake torque
ASIL D
kVA = engineered safety
Advanced Hazards of Electrified Powertrains
kVA = engineered safety
What are Advanced Hazards?
• Advanced hazards are hazards we are not familiar with– Different technology– Different configuration– Different behaviors– Different environment
• Systemic hazards are inherently hard to associate with an “Item”– May overlap or fall between multiple Items: assign ownership?– Controls architecture often ties the system together – many stakeholders
kVA = engineered safety
How ISO 26262 Addresses Systemic Hazards
• Systemic Solutions• ISO 26262-2:2011, Management of Functional Safety• ISO 26262-1:2011, Vocabulary
1.130 systematic failure – failure (1.39), related in a deterministic way to a certain cause, that can only be
eliminated by a change of the design or of the manufacturing process, operational procedures, documentation or other relevant factors
kVA = engineered safety
How Non-FuSa Engineers Develop FuSa
How (non-FuSa) Development Engineers develop functional safety concepts1. Keep the same functional safety concept from a simpler system2. Adapt that concept however they need for their advanced system3. Hope they pass validation!
CASE STUDY #1: EV DRIVE INSTABILITY
“Divide responsibility and nobody is responsible.”W. Edwards Deming
kVA = engineered safety
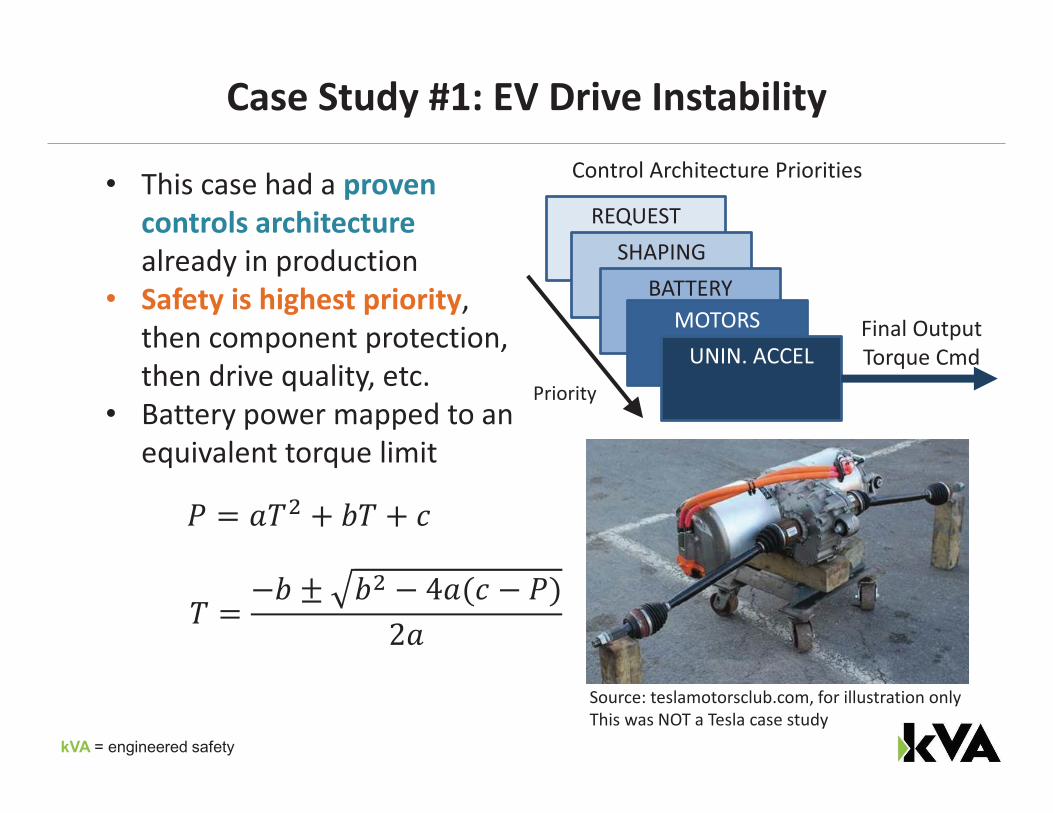
Case Study #1: EV Drive Instability
• This case had a proven controls architecture already in production
• Safety is highest priority, then component protection, then drive quality, etc.
• Battery power mapped to an equivalent torque limit
Source: teslamotorsclub.com, for illustration onlyThis was NOT a Tesla case study
REQUESTSHAPING
BATTERYMOTORS
UNIN. ACCELFinal OutputTorque Cmd
Priority
Control Architecture Priorities
kVA = engineered safety
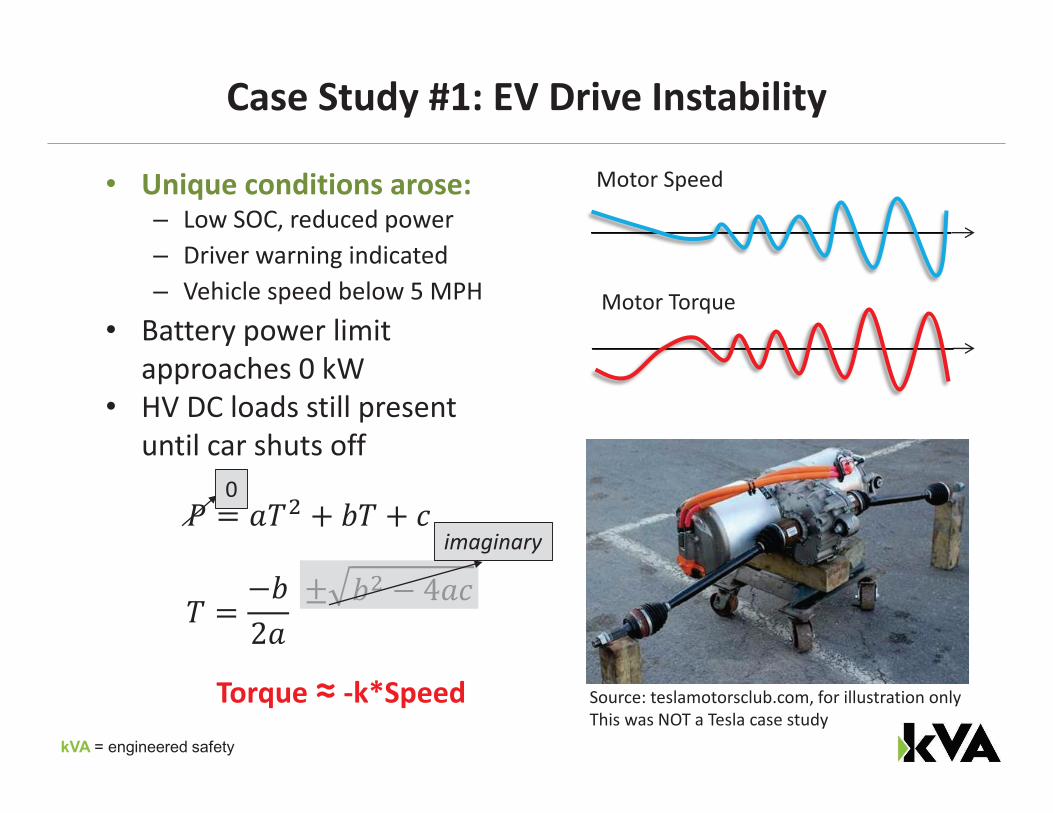
Case Study #1: EV Drive Instability
• Unique conditions arose:– Low SOC, reduced power– Driver warning indicated– Vehicle speed below 5 MPH
• Battery power limit approaches 0 kW
• HV DC loads still present until car shuts off
Source: teslamotorsclub.com, for illustration onlyThis was NOT a Tesla case study
0
imaginary
Torque ≈ -k*Speed
Motor Speed
Motor Torque
kVA = engineered safety
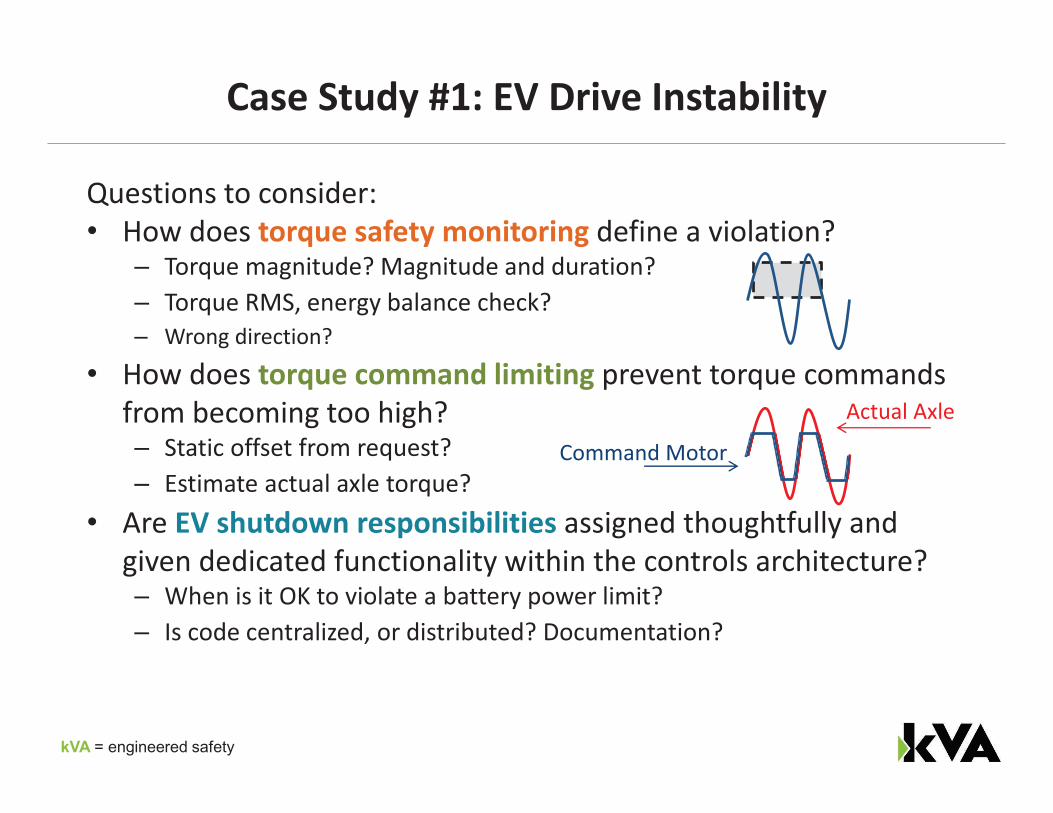
Case Study #1: EV Drive Instability
Questions to consider:• How does torque safety monitoring define a violation?
– Torque magnitude? Magnitude and duration?– Torque RMS, energy balance check?– Wrong direction?
• How does torque command limiting prevent torque commands from becoming too high?– Static offset from request?– Estimate actual axle torque?
• Are EV shutdown responsibilities assigned thoughtfully and given dedicated functionality within the controls architecture?– When is it OK to violate a battery power limit?– Is code centralized, or distributed? Documentation?
Actual Axle
Command Motor
CASE STUDY #2: DUAL AXLE RISKS
“Best efforts will not substitute for knowledge.”W. Edwards Deming
kVA = engineered safetySuppliers
Performance Mngr
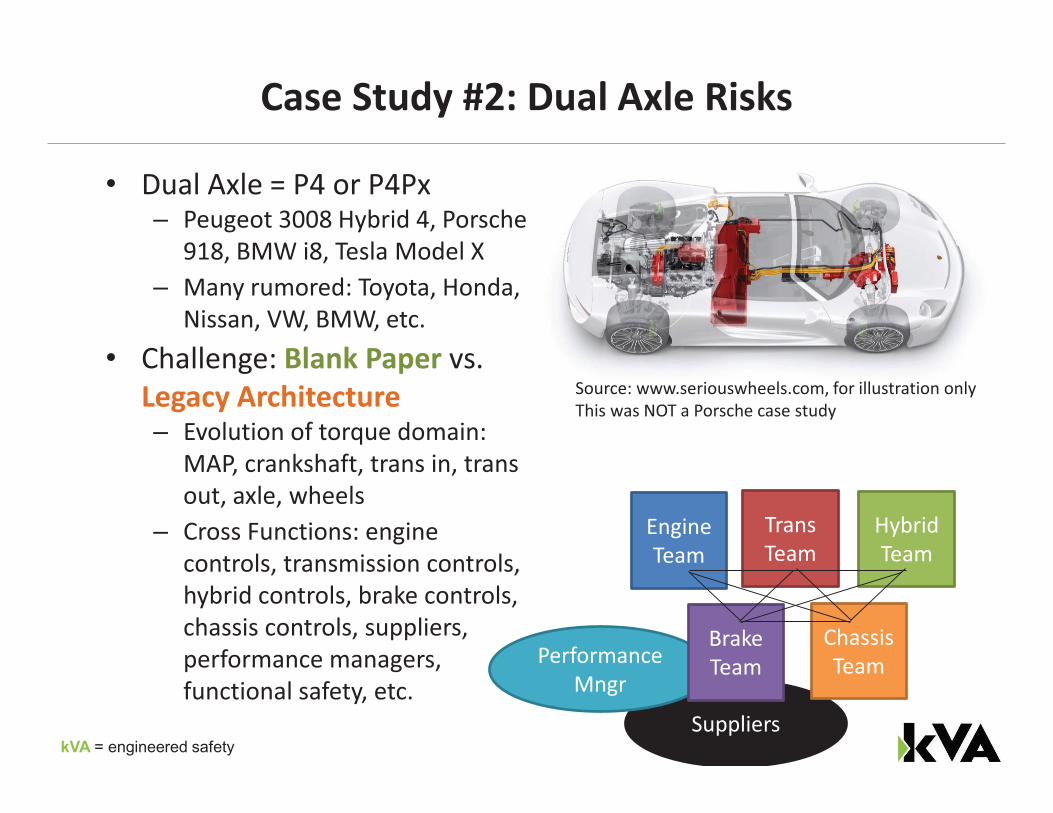
Case Study #2: Dual Axle Risks
• Dual Axle = P4 or P4Px– Peugeot 3008 Hybrid 4, Porsche
918, BMW i8, Tesla Model X– Many rumored: Toyota, Honda,
Nissan, VW, BMW, etc.• Challenge: Blank Paper vs.
Legacy Architecture– Evolution of torque domain:
MAP, crankshaft, trans in, trans out, axle, wheels
– Cross Functions: engine controls, transmission controls, hybrid controls, brake controls, chassis controls, suppliers, performance managers, functional safety, etc.
Source: www.seriouswheels.com, for illustration onlyThis was NOT a Porsche case study
Engine Team
TransTeam
HybridTeam
BrakeTeam
ChassisTeam
kVA = engineered safety
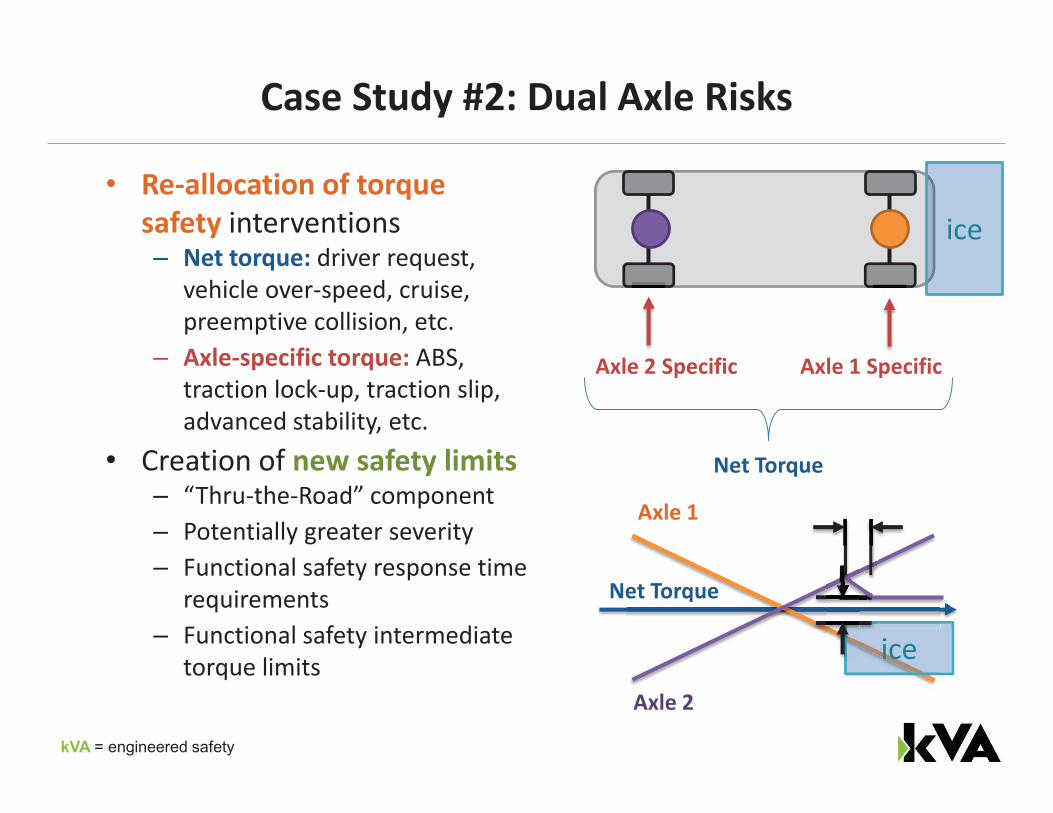
Case Study #2: Dual Axle Risks
• Re-allocation of torque safety interventions– Net torque: driver request,
vehicle over-speed, cruise, preemptive collision, etc.
– Axle-specific torque: ABS, traction lock-up, traction slip, advanced stability, etc.
• Creation of new safety limits– “Thru-the-Road” component– Potentially greater severity– Functional safety response time
requirements– Functional safety intermediate
torque limits
Axle 2 Specific Axle 1 Specific
Net Torque
Net Torqueet Torqueet Torque
Axle 1
Axle 2
ice
ice
kVA = engineered safety
Case Study #2: Dual Axle Risks
Questions to consider:• Does each development team have a common safety rep?
– Internal safety members?– Do engineers know safety philosophy,
or safety implementation?
• Are development engineers eager to raise potential safety concerns before tackling it themselves?– Are they aware of safety “success stories”?– Do they see functional safety as a checkbox or a guide?
• Are safety related interventions assigned thoughtfully and given dedicated functionality within the controls architecture?– Is code centralized, or distributed? Documentation?– Does project management assign authority to functional safety?
CASE STUDY #3: HAPTIC BRAKE PROPERTIES
“Meeting specifications is not enough.”and“Quality is pride of workmanship.”W. Edwards Deming
kVA = engineered safety
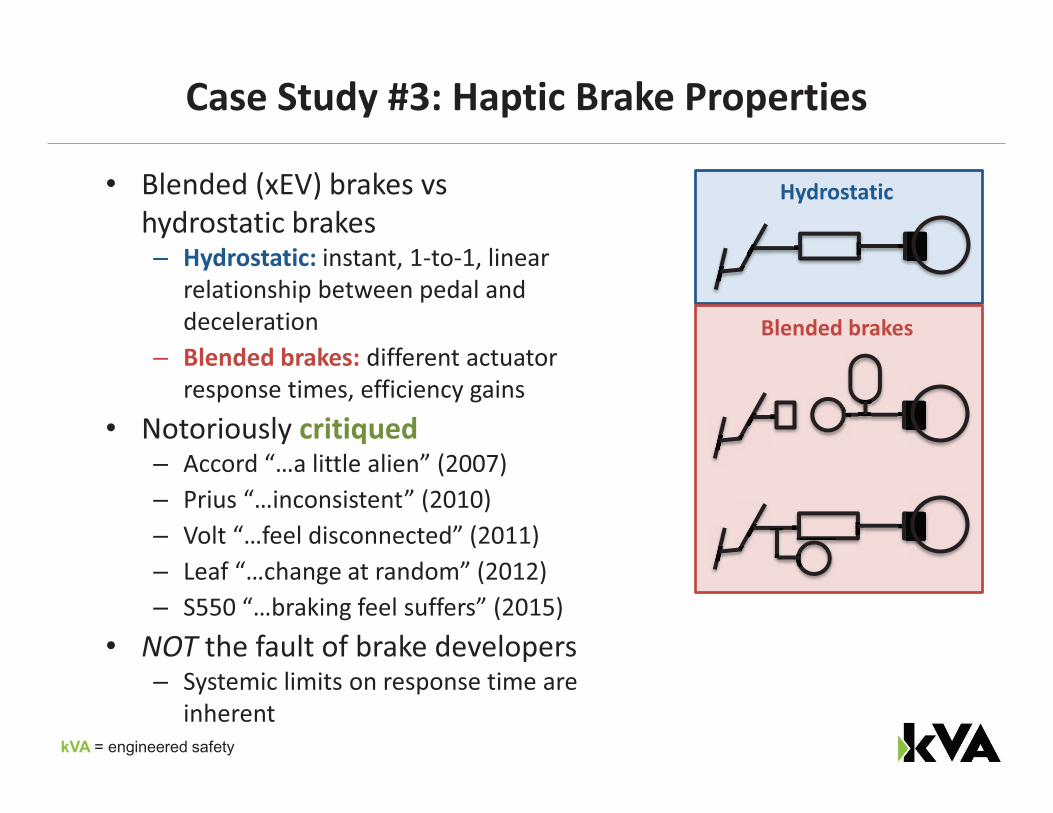
Case Study #3: Haptic Brake Properties
• Blended (xEV) brakes vs hydrostatic brakes– Hydrostatic: instant, 1-to-1, linear
relationship between pedal and deceleration
– Blended brakes: different actuator response times, efficiency gains
• Notoriously critiqued– Accord “…a little alien” (2007)– Prius “…inconsistent” (2010)– Volt “…feel disconnected” (2011)– Leaf “…change at random” (2012)– S550 “…braking feel suffers” (2015)
• NOT the fault of brake developers– Systemic limits on response time are
inherent
Blended brakes
Hydrostatic
kVA = engineered safety
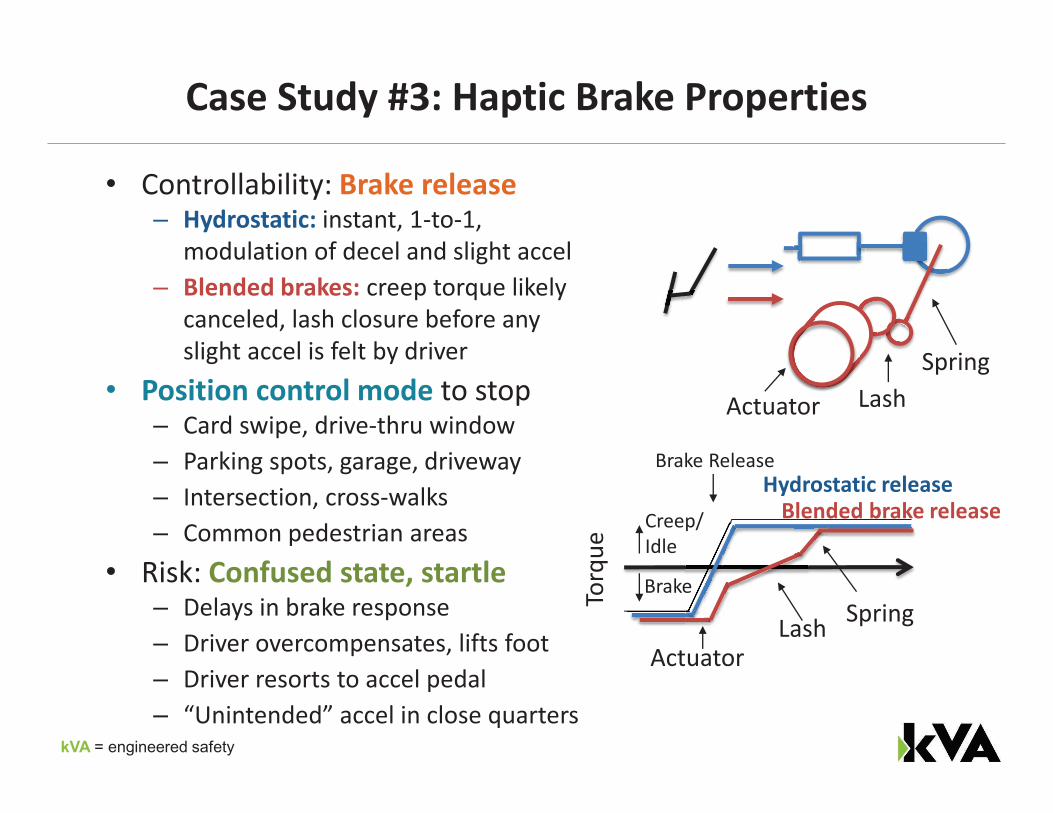
Case Study #3: Haptic Brake Properties
• Controllability: Brake release– Hydrostatic: instant, 1-to-1,
modulation of decel and slight accel– Blended brakes: creep torque likely
canceled, lash closure before any slight accel is felt by driver
• Position control mode to stop– Card swipe, drive-thru window– Parking spots, garage, driveway– Intersection, cross-walks– Common pedestrian areas
• Risk: Confused state, startle– Delays in brake response– Driver overcompensates, lifts foot– Driver resorts to accel pedal– “Unintended” accel in close quarters
LashSpring
Torq
ue
Creep/Idle
Brake
Brake Release
Blended brake releaseHydrostatic release
Actuator
Lash Spring
Actuator
kVA = engineered safety
Case Study #3: Haptic Brake Properties
Questions to consider:• Does functional safety account for confusion or startle?
– Delays or partial -> Confusion– Sudden or excessive -> Startle
• Are development engineers eager to raise potential safety concerns before tackling it themselves?– Are they aware of safety “success stories”?– Do they see functional safety as a checkbox or a guide?
• Is functional safety given system level authority?– Are system level requirements accessible to development teams?– Does system validation provide “flags” to alert functional safety in areas
traditionally left to quality, performance, etc.?
REVIEW OF CASE STUDIES
“We should work on our process, not the outcome of our processes.”and“The aim should be to work on the method of management.”W. Edwards Deming
kVA = engineered safety
Review of Case Studies
• Case Study #1 – EV Drive Instability: drivability, durability, quality, efficiency, and functional safety
• Case Study #2 – Dual Axle Risks: drivability, efficiency, and functional safety
• Case Study #3 – Haptic Brake Properties: drivability, quality, efficiency, and functional safety
• Functional safety is inseparable from both performance objectives and product development
kVA = engineered safety
Recent Interview on ISO 26262
Mr. Rivett, what is a critical factor for success when working in functional safety with the ISO Standard?
“It’s about pinning down the feature or system on the vehicle in terms of what the standard calls the “item definition”. A lot of the systems that we’re doing now build on software legacy systems, and they are also distributed systems where functions run on different nodes and communicate across busses. That can be quite complex, so the critical factor of success is getting that defined well at the start before you start trying to apply the functional safety processes. It’s hard to do because you have to interface with legacy, and it’s distributed across different nodes, so responsibility for different bits of the system might be in different bits of the organisation. Getting cross-department cooperation is critical. If you can get that sorted out, it makes life a lot easier. If you don’t, you will miss things that come up later on, making the process much more difficult than it would otherwise be.”
Roger Rivett works as Functional Safety Technical Specialist at Jaguar Land Rover, UK and is a long-time member of the International ISO 26262 Committee. (Automotive IQ, June 2015)
kVA = engineered safety
Parting Thoughts: Systemic Solutions
• Encourage open forums– Monthly event (donuts)– Newsletters– Roundtables– Highlight successes
• Teach functional safety philosophy– Proactive– Not checklist, not legacy– Fundamentals of Hazard
Analysis and Risk Assesment– Fundamentals of validation
testing
“People need to know how their job contributes.”W. Edwards Deming
“Break down barriers between departments”
W. Edwards Deming
kVA = engineered safety
Summary















![How VectorCAST supports ASPICE and ISO 26262 · ISO/IEC/IEEE 12207 [1995] ISO/IEC 15504 [2003-04] Automotive SPICE v2.5 [2010] Automotive SPICE v3.1 [2017] Safety Standards IEC 61508](https://img.pdfslide.us/doc/110x75/5e13817ba388b274dd5c52ce/how-vectorcast-supports-aspice-and-iso-26262-isoiecieee-12207-1995-isoiec-15504.jpg)