Embed Size (px)
Citation preview

An Introduction to Control TheoryWith Applications to Computer Science
Joseph HellersteinAnd
Sujay ParekhIBM T.J. Watson Research Center
{hellers,sujay}@us.ibm.com

2
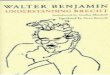
Example 1: Liquid Level System
H
Input valve control
float
Output valve
Goal: Design the input valve control to maintain a constant height regardless of the setting of the output valve
iq
oqV
(height)
(input flow)
(output flow)
(volume)
R(resistance)

3
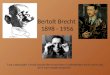
Example 2: Admission Control
Users
Administrator
Controller
RPCs
Sensor
Server
Referencevalue
QueueLength
Tuningcontrol
ServerLog
Goal: Design the controller to maintain a constant queue length regardless of the workload

4
Why Control Theoryn Systematic approach to analysis and design
n Transient responsen Consider sampling times, control frequencyn Taxonomy of basic controlsn Select controller based on desired characteristics
n Predict system response to some inputn Speed of response (e.g., adjust to workload
changes)n Oscillations (variability)
n Approaches to assessing stability and limit cycles

5
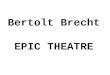
Example: Control & Response in an Email Server
Control(MaxUsers)
Response(queue length)
Good
Slow
Bad
Useless

6
Examples of CT in CSn Network flow controllers (TCP/IP – RED)
n C. Hollot et al. (U.Mass)
n Lotus Notes admission controln S. Parekh et al. (IBM)
n QoS in Cachingn Y. Lu et al. (U.Va)
n Apache QoS differentiationn C. Lu et al. (U.Va)

7
Outlinen Examples and Motivationn Control Theory Vocabulary and Methodologyn Modeling Dynamic Systemsn Standard Control Actionsn Transient Behavior Analysisn Advanced Topicsn Issues for Computer Systemsn Bibliography

8
Feedback Control System
PlantControllerΣ)(tu
)(tnDisturbance
)(ty)(tr
)(te
Transducer
)(tb
)()()( tbtrte −=+
–
Reference Value

9
Controller Design Methodology
Block diagram
construction
Model Ok?
Stop
Start
Transfer function formulation and
validation
Controller Design
Objective achieved?
Controller Evaluation
Y
Y
N N
System Modeling

10
Control System Goalsn Regulation
n thermostat, target service levelsn Tracking
n robot movement, adjust TCP window to network bandwidth
n Optimizationn best mix of chemicals, minimize response
times

11
System Modelsn Linear vs. non-linear (differential eqns)
n eg, n Principle of superposition
n Deterministic vs. Stochasticn Time-invariant vs. Time-varying
n Are coefficients functions of time?n Continuous-time vs. Discrete-time
n t ∈ R vs k ∈ Z
xbxbyaya 0201 +=+ &&&

12
Approaches to System Modelingn First Principles
n Based on known lawsn Physics, Queueing theory
n Difficult to do for complex systemsn Experimental (System ID)
n Statistical/data-driven modelsn Requires datan Is there a good “training set”?

13
The Complex Plane (review)Imaginary axis (j)
Real axis
jyxu +=
x
yφ
r
rφ−
jyxu −=(complex) conjugate
y−
22
1
||||
tan
yxuru
xy
u
+=≡≡
=≡∠ −φ

14
Basic Tool For Continuous Time: Laplace Transform
n Convert time-domain functions and operations into frequency-domain n f(t) → F(s) (t∈þ, s∈ÿ)n Linear differential equations (LDE) → algebraic
expression in Complex plane
n Graphical solution for key LDE characteristicsn Discrete systems use the analogous z-transform
∫∞ −==
0)()()]([ dtetfsFtf stL

15
Laplace Transforms of Common FunctionsName f(t) F(s)
Impulse
Step
Ramp
Exponential
Sine
1
s1
2
1s
as −1
22
1s+ω
1)( =tf
ttf =)(
atetf =)(
)sin()( ttf ω=
>=
=0001
)(tt
tf

16
Laplace Transform Properties
[ ] [ ]
)(lim)(lim
)(lim)0(
)()()
)(1)(
)(
)0()()(
)()()]()([
0
02121
0
2121
ssFtf-
ssFf-
sFsFdt(tt)f(tf
dttfss
sFdttfL
fssFtfdtd
L
sbFsaFtbftafL
st
s
t
t
→∞→
∞→
±=
=
=+
=−
+=
±−=
±=±
∫
∫∫
theorem valueFinal
theorem valueInitial
nConvolutio
nIntegratio
ationDifferenti
calingAddition/S

17
Insights from LaplaceTransformsn What the Laplace Transform says about f(t)
n Value of f(0)n Initial value theorem
n Does f(t) converge to a finite value?n Poles of F(s)
n Does f(t) oscillate?n Poles of F(s)
n Value of f(t) at steady state (if it converges)n Limiting value of F(s) as s->0

18
Transfer Functionn Definition
n H(s) = Y(s) / X(s)n Relates the output of a linear system
(or component) to its inputn Describes how a linear system responds
to an impulsen All linear operations allowed
n Scaling, addition, multiplication
H(s)X(s) Y(s)

19
Block Diagramsn Pictorially expresses flows and relationships
between elements in systemn Blocks may recursively be systemsn Rules
n Cascaded (non-loading) elements: convolutionn Summation and difference elements
n Can simplify

20
Block Diagram of System
PlantControllerΣ)(sU
)(sN
Disturbance
)(sY
)(sR)(sE
Transducer
)(sB
+
–
Σ
)(1 sG )(2 sG
)(sH
Reference Value

21
Combining Blocks
Combined BlockΣ)(sY
)(sR)(sE
Transducer
)(sB
+
–
)(sH
)())()(( 21 sGsNsG •+
Reference Value

22
Block Diagram of Access Control
M(z)
G(z) N(z) S(z)
Controller Notes Server
Sensor
R(z) +E(z)
U(z)
-
Q(z)Σ
Users
Controller Sensor
ServerServerLog

23
Key Transfer Functions
)()()()(
)()(
)()(
21 sGsGsEsU
sUsY
sEsY
== :eedforwardF
)()()()()(
21 sHsGsGsEsB
= :Loop-penO)()()(1
)()()()(
:21
21
sHsGsGsGsG
sRsY
+=Feedback
PlantControllerΣ)(sU
)(sY
)(sR)(sE
Transducer)(sB
+
–
)(1 sG )(2 sG
)(sH
Reference

24
Rational Laplace Transforms
m
sFsAssFsBs
bsbsbsB
asasasA
sBsA
sF
mm
nn
poles # system ofOrder complex are zeroes and Poles
(So, :Zeroes (So, :Poles
==
==∋∞==∋
+++=
+++=
=
)0*)(0*)(*)*)(0*)(*
...)(
...)(
)()(
)(
01
01

25
First Order System
Reference
)(sY)(sR
Σ )(sE
1)(sB
)(sUsT+1
1K
sTK
sTKK
sRsY
+≈
++=
11)()(

26
First Order System
Ramp, step, exponential
Ramp response
Step, exponential
Step response
ExponentialImpulse response
1 sTK
+
/1
2 TsKT
-s
KT-
sK
+
/1
Ts
K-
sK
+
No oscillations (as seen by poles)

27
Second Order System
:frequency natural Undamped
where :ratio Damping
(ie,part imaginary zero-non have poles if Oscillates
:response Impulse
JK
JKBBB
JKB
ssKBsJsK
sRsY
N
cc
NN
N
=
==
<−
++=
++=
ω
ξ
ωξωω
2
)04
2)()(
2
22
2
2

28
Second Order System: Parameters
noscillatio the offrequency the gives frequency natural undamped of tionInterpreta
0)Im0,(Re Overdamped 1 Im) (Re dUnderdampe
0)Im 0,(Re noscillatio Undamped ratio damping of tionInterpreta
Nω
ξξ
ξ
=≠≤≠≠<<
≠==
:0:10
:0

29
Transient Response Characteristics
statesteady of % specified within stays time Settling :
reached is valuepeak whichat Time :
valuestatesteady reachfirst untildelay time Rise :
valuestatesteady of 50% reach untilDelay :
=
=
s
p
r
d
t
t
tt
0.5 1 1.5 2 2.5 3
0.25
0.5
0.75
1
1.25
1.5
1.75
2
rt
overshoot maximum=pM
pt stdt

30
Transient Responsen Estimates the shape of the curve based
on the foregoing points on the x and y axis
n Typically applied to the following inputsn Impulsen Stepn Rampn Quadratic (Parabola)

31
Effect of pole locations
Faster Decay Faster Blowup
Oscillations(higher-freq)
Im(s)
Re(s)(e-at) (eat)

32
Basic Control Actions: u(t)
:control alDifferenti
:control Integral
:control alProportion
sKsEsU
tedtd
Ktu
sK
sEsU
dtteKtu
KsEsU
teKtu
dd
it
i
pp
==
==
==
∫
)()(
)()(
)()(
)()(
)()(
)()(
0

33
Effect of Control Actionsn Proportional Action
n Adjustable gain (amplifier)
n Integral Actionn Eliminates bias (steady-state error)n Can cause oscillations
n Derivative Action (“rate control”)n Effective in transient periodsn Provides faster response (higher sensitivity)n Never used alone

34
Basic Controllers
n Proportional control is often used by itself
n Integral and differential control are typically used in combination with at least proportional controln eg, Proportional Integral (PI) controller:
+=+==
sTK
sK
KsEsU
sGi
pI
p
11
)()(
)(

35
Summary of Basic Controln Proportional control
n Multiply e(t) by a constant
n PI controln Multiply e(t) and its integral by separate constantsn Avoids bias for step
n PD controln Multiply e(t) and its derivative by separate constantsn Adjust more rapidly to changes
n PID controln Multiply e(t), its derivative and its integral by separate
constantsn Reduce bias and react quickly

36
Root-locus Analysisn Based on characteristic eqn of closed-loop
transfer functionn Plot location of roots of this eqn
n Same as poles of closed-loop transfer functionn Parameter (gain) varied from 0 to ∞
n Multiple parameters are okn Vary one-by-onen Plot a root “contour” (usually for 2-3 params)
n Quickly get approximate resultsn Range of parameters that gives desired response

37
Digital/Discrete Controln More useful for computer systemsn Time is discrete
n denoted k instead of tn Main tool is z-transform
n f(k) → F(z) , where z is complexn Analogous to Laplace transform for s-domain
n Root-locus analysis has similar flavorn Insights are slightly different
∑∞
=
−==0
)()()]([k
kzkfzFkfZ

38
z-Transforms of Common FunctionsName f(t) F(z)
Impulse
Step
Ramp
Exponential
Sine
1
1−zz
2)1( −zz
aezz
−
1)(Cos2Sin
2 +− zazaz
1)( =tf
ttf =)(
atetf =)(
)sin()( ttf ω=
F(s)
1
s1
2
1s
as −1
22
1s+ω
>=
=0001
)(tt
tf

39
Root Locus analysis of Discrete Systems
n Stability boundary: |z|=1 (Unit circle)n Settling time = distance from Originn Speed = location relative to Im axis
n Right half = slowern Left half = faster

40
Effect of discrete poles
|z|=1
Longer settling time
Re(s)
Im(s)
Unstable
Stable
Higher-frequencyresponse
Tsez = :Intuition

41
System ID for Admission Control
M(z)
G(z) N(z) S(z)
Controller Notes Server
Sensor
R(z) +E(z)
U(z)
-
Q(z)Σ
ARMA Models
Control Law
Transfer Functions
δzzzK
czdzd
azzb
zGzSzN i 11
)()()(1
10
1
0
−−+
−=Open-Loop:
δzzzK
zG
czdzd
zS
azzb
zN
i 11
)(
)(
)(
1
10
1
0
−=
−+
=
−=
)()1()(
)1()()1()(
)()1()(
101
01
teKtutu
tqdtqdtmctm
tubtqatq
i+−=
−++−=+−=

42
Root Locus Analysis of Admission Control
Predictions:•Ki small => No controller-induced oscillations•Ki large => Some oscillations•Ki v. large => unstable system (d=2)•Usable range of Ki for d=2 is small

43
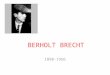
Experimental Results
Control(MaxUsers)
Response(queue length)
Good
Slow
Bad
Useless

44
Advanced Control Topicsn Robust Control
n Can the system tolerate noise?n Adaptive Control
n Controller changes over time (adapts)n MIMO Control
n Multiple inputs and/or outputsn Stochastic Control
n Controller minimizes variancen Optimal Control
n Controller minimizes a cost function of error and control energyn Nonlinear systems
n Neuro-fuzzy controln Challenging to derive analytic results

45
Issues for Computer Sciencen Most systems are non-linear
n But linear approximations may don eg, fluid approximations
n First-principles modeling is difficultn Use empirical techniques
n Control objectives are differentn Optimization rather than regulation
n Multiple Controlsn State-space techniquesn Advanced non-linear techniques (eg, NNs)

46
Selected Bibliographyn Control Theory Basics
n G. Franklin, J. Powell and A. Emami-Naeini. “Feedback Control of Dynamic Systems, 3rd ed”. Addison-Wesley, 1994.
n K. Ogata. “Modern Control Engineering, 3rd ed”. Prentice-Hall, 1997.n K. Ogata. “Discrete-Time Control Systems, 2nd ed”. Prentice-Hall, 1995.
n Applications in Computer Sciencen C. Hollot et al. “Control-Theoretic Analysis of RED”. IEEE Infocom 2001 (to appear).n C. Lu, et al. “A Feedback Control Approach for Guaranteeing Relative Delays in Web
Servers”. IEEE Real-Time Technology and Applications Symposium, June 2001.n S. Parekh et al. “Using Control Theory to Achieve Service-level Objectives in
Performance Management”. Int’l Symposium on Integrated Network Management, May 2001
n Y. Lu et al. “Differentiated Caching Services: A Control-Theoretic Approach”. Int’l Conf on Distributed Computing Systems, Apr 2001
n S. Mascolo. “Classical Control Theory for Congestion Avoidance in High-speed Internet”. Proc. 38th Conference on Decision & Control, Dec 1999
n S. Keshav. “A Control-Theoretic Approach to Flow Control”. Proc. ACM SIGCOMM, Sep 1991
n D. Chiu and R. Jain. “Analysis of the Increase and Decrease Algorithms for Congestion Avoidance in Computer Networks”. Computer Networks and ISDN Systems, 17(1), Jun 1989