Embed Size (px)
Citation preview

An Integrated Telematics Application forAutomotives
Master Thesis
for the
Master of Arts
from the Course of Studies Interactive Media Systems
at the University of Applied Sciences Augsburg
by
Simon Walter
February 1st 2017
Student ID 949226Company Allianz Managed Operations & Services SE, MünchenSupervisor Prof. Dr. Michael KippSupervisor Prof. Daniel Rothaug

Author’s declaration
Hereby I declare on my word of honour:
1. that this Master Thesis, titled An Integrated Telematics Application for Automotives isentirely the product of my own scholarly work, unless otherwise indicated in the text orreferences, or acknowledged below;
2. I have indicated the thoughts adopted directly or indirectly from other sources at theappropriate places within the document;
3. this Master Thesis has not been submitted either in whole or part, for a degree at this orany other university or institution;
4. I have not published this Master Thesis in the past;
5. the printed version is equivalent to the submitted electronic one.
I am aware that a dishonest declaration will entail legal consequences.
Augsburg, February 1st 2017
Simon Walter

Abstract
Mobile devices are becoming an increasingly important platform for telematics products in theinsurance industry. The insurance company Allianz also provides its customers with functionalitiesfor monitoring driving behavior through a mobile app feature called Good Ride. This thesisextends Good Ride with crucial functionalities like automatic detection of trips and classificationof used transportation modes. The trip detection process monitors the user’s location at any timeand identifies the start and stop of a trip. This is achieved by adopting the idea of geofencing. Asystem combining fuzzy logic and geographic information like the stations of public transport isbuilt to classify the transportation modes of single-mode segments. This thesis utilizes a trainingdata set of 94 segments for the development and optimization of the classification process. Inaddition to the two core functionalities, this thesis explains the design and implementation of anAndroid app prototype. This application successfully bundles the functionalities of this thesisand shows a possible design for the visualization of telematics trip data.

Acronyms
CAN Controller Area NetworkGIS Geographic Information SystemGPS Global Positioning SystemPLL Phase-Lock LoopSDK Software Development KitUBI Usage Based Insurance

Contents
Acronyms I
1 Introduction 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Outline of this Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Related Work 32.1 Summary of Solutions for Transportation Mode Detection in Travel Data . . . . 32.2 Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Smartphone-Based Telematics in the Insurance Industry 63.1 Insurance Telematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Hardware Variations for Telematics . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2.1 On-Board-Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2.2 Smartphone as a Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2.3 Comparison of On-Board Units and Smartphones . . . . . . . . . . . . . . 9
3.3 Telematics at Allianz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Concept: Automatic Trip Detection and Classification of Transportation Modes 124.1 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124.2 Data Collection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.3 Automatic Detection of Trip Start and Stop . . . . . . . . . . . . . . . . . . . . . 15
4.3.1 Detection of Trip Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.3.2 Detection of Trip Stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.4 Classification of Transportation Modes . . . . . . . . . . . . . . . . . . . . . . . . 174.4.1 Segmentation into Single-Mode Segments . . . . . . . . . . . . . . . . . . 184.4.2 Classification of a Segment . . . . . . . . . . . . . . . . . . . . . . . . . . 194.4.3 Merging of Segments into Trips . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Development of the Mobile Application 225.1 Requirements and Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.1.1 Persistence of Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.1.2 Modular Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.1.3 Background Activity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.1.4 Activate and Deactivate Tracking . . . . . . . . . . . . . . . . . . . . . . . 235.1.5 Trip List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.1.6 Trip Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.2 App Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.2.1 Development Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.2.2 Implementation of the Trip List . . . . . . . . . . . . . . . . . . . . . . . . 255.2.3 Implementation of the Trip Details . . . . . . . . . . . . . . . . . . . . . . 26

6 Implementation of the Concept 296.1 Implementation of the Automated Trip Detection . . . . . . . . . . . . . . . . . . 296.2 Implementation of Data Collection . . . . . . . . . . . . . . . . . . . . . . . . . . 306.3 Implementation of Transportation Mode Classification . . . . . . . . . . . . . . . 30
6.3.1 Segmentation into Single-Mode Segments . . . . . . . . . . . . . . . . . . 316.3.2 Segment Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326.3.3 Merging of Segments into Trips . . . . . . . . . . . . . . . . . . . . . . . . 34
7 Discussion 36
8 Conclusion and Outlook 38
Bibliography 40
Appendix 43

1 Introduction
In the last two decades, telematics has been a growing topic in the insurance industry. Productswith usage-based car insurance premiums have been established mainly in Italy, the UnitedKingdom, the United States, and Austria [31].In 2016, several large German insurance companies have followed this course. Allianz [3], theirsubsidiary AllSecur [1], Generali [8] and HUK Coburg [34] are now offering products that enablecustomers to record their trips and benefit from good driving behavior via discounts.
The idea to no longer build insurance premiums on risk features reflects the recent developmentof today’s society. Christoph Kucklick shows in his book "Die granulare Gesellschaft" ("Thegranular society") how digitalization has led to more detailed and better-analyzed data aboutour life. The high amount of new information enables us to view our life in high resolution.Evaluating individuals by using the average of a group of people seems to be outdated. Accordingto Kucklick, all aspects of our life will be affected by this - whether it is medicine, law or societyin general. The author calls this "the world of the new resolution."
New technologies will allow the collection of much more customer data, even in the insuranceindustry. That will lead to individual premiums which are based on real driving behavior insteadof averaged risk features. Especially smartphones offer a widely spread and fast developingplatform with a high potential for telematics applications.
1.1 Motivation
The insurance company Allianz provides their customers with the mobile telematics feature"Good Ride". This feature enables the users to monitor their driving behavior within an app.Unfortunately, Good Ride lacks some crucial functionalities. This includes the automateddetection of trips, as well as a method to classify transportation modes in trajectories.In this thesis, these two functionalities will be conceptualized and implemented. Furthermore,a mobile app prototype for Android including these functionalities will be developed. Theapplication will also contain a new visualization approach to show telematics trip data within anapp.Eventually, this thesis should foster knowledge building in the field of telematics at Allianz.
1.2 Outline of this Thesis
This thesis is sub-divided into six broad sections. The first section introduces related work inthe field of travel recognition and mode detection (chapter 2). The subsequent chapter will
1

1 Introduction
explain the basics of telematics in the insurance industry (chapter 3). That will also includedifferent hardware approaches. The next chapter (chapter 4) examines the concept of automatictrip detection as well as the classification of transportation modes. Chapter 5 deals with theconceptional design and development of the mobile application. The following chapter (chapter 6)shows the implementation details of the concept. The closing section reviews the results of thisproject (chapter 7), and will then arrive at a conclusion and eventually show possibilities offollow-up projects (chapter 8).
2

2 Related Work
Multiple research papers are addressing the key problems of this thesis. The following chapterwill consecutively summarize these documents and then reveal the observations made.
2.1 Summary of Solutions for Transportation Mode Detection inTravel Data
In this section, four existing methods for segmentation and classification of transportation modesare presented.
Transportation Mode Detection Using Mobile Phones and GIS Information
Stenneth et al. [28] implemented a centralized system for transportation mode classificationby employing a combination of Global Positioning System (GPS) and Geographic InformationSystem (GIS) data. The mobile application of this project initially uploads the driving datato the backend server. There, the data is analyzed, and the transportation mode is classified.Eventually, the results are sent back to the mobile device and shown to the user.The authors differentiate between six transportation modes: Car, bus, aboveground train, walking,bicycle, and stationary. The classification process computes different features like average speed,accuracy of GPS data, heading change rate and average acceleration. Furthermore, GIS datalike the real-time position of busses or the location of railways and bus stops is included.Five different inference models were tested: Bayesian Net, Decision Tree, Random Forest, NaiveBayesian and Multilayer Perceptron. Random Forest yielded the best results by an averagedetection rate of 93 % whereas the lack of GIS data reduced the detection rate to 76 %.
Processing GPS Raw Data without Additional Information
The work of Schuessler and Axhausen [24] addresses the detection of transportation modes intravel surveys. That includes the smoothing of GPS data, detection of trips in trajectories,segmentation of trips into single-mode segments, as well as classification of the transportationmode. In contrast to the previous paper, this work is based on GPS data alone and geographicinformation is not considered.Since the authors GPS data does not include speeds measurements, the application calculatesvelocity features with the position and time differences of two consecutive points. Due to widevariations in accuracy, the process demands an extensive smoothing process of GPS data.The authors assume that walking is necessary to change between transportation modes. For this
3

2 Related Work
reason, the application splits multi-mode segments into single-mode segments by looking for lowspeed and low acceleration. Additionally, GPS signal losses trigger the division of trajectories.A rule-based fuzzy logic approach using velocity and acceleration features is implemented toclassify the transportation mode. Five different modes are supported: Walking, bicycle, car,urban public transport (i.e. bus and tram) and rail. Unfortunately, the paper does not provideany details about the accuracy of the classification process.
Transportation Mode-based Segmentation and Classification of MovementTrajectories
In their work “Transportation Mode-based Segmentation and Classification of Movement Tra-jectories” [2] Biljecki, Ledoux, and Oosterom perform the segmentation and classification of 16million datasets for a Dutch-based travel survey. The segmentation process consists of two steps:At first, the trajectories are split into discrete trips based on long dwell times (i.e. trips separatedby sleep or work hours). Subsequently, a more detailed segmentation is utilized to divide tripsinto single-mode segments. For this purpose, phases with a velocity of less than 2 km/h anda duration of more than 12 seconds are identified. These periods are considered as potentialtransition points.Ten individual transportation modes are supported in this method: Walking, Car, Bus, Train,Tram, Underground, Bicycle, Ferry, Sailing Boat, and Aircraft.In the classification process, indicators based on velocity (95th percentile of the maximum speed,mean speed, mean moving speed), average proximity to infrastructure systems (railways, tramlines, roads, bus lines and metro lines) and the location of trajectories compared to water surfacesare used. The geographic data is provided by the crowdsourced project OpenStreetMap.This paper also implements the classification process with a fuzzy logic and rule-based approach.Therefore, each mode corresponds to a degree of membership for every indicator. The classifica-tion then shows the certainty (value of 0 to 1) for the usage of the transportation mode.The authors indicate an accuracy of 91.6 % for their method.
Deducing Mode and Purpose from GPS Data
In this paper, Stopher, Clifford, and Zhang [29] cover transportation mode classification andidentification of trip purposes in travel surveys. Unlike other projects, they do not deal with thesegmentation of trajectories, because their data already consists of segmented trips.In their classification process, they use heuristics to approach the classified transportation modegradually. By employing GPS and GIS data, the system eliminates or assures the usage of aparticular transportation mode step-by-step. In this method, GIS data comprises the streetnetwork, routes of public transport and bus or tram stations.Additionally, the project applies knowledge about the user’s workplace, educational institutionor the two most frequently used grocery stores to identify the trip purpose.Maximum speed and acceleration are used as classification indicators.
4

2 Related Work
2.2 Observations
The addressed papers mainly focus on the identification of the transportation modes in traveldata. The indicators play a major role for this. In every classification process of the projects,speed is the most important information and used by all.Moreover [28], [2] and [29] apply GIS data to identify important locations near systems of publictransport. Especially Stenneth et al. [28] were able to drastically increase their classificationaccuracy from 76 % to 93 % by using GIS data.Unfortunately, none of the papers focus on mobile applications. Only Stenneth et al. [28] showsa centralized classification solution in combination with a mobile device. This kind of centralizedapproach cannot be applied in this thesis because it is necessary that the proposed solution ismobile-only. Nonetheless, the classification procedures can be transferred to mobile systems.An additional notable observation is the segmentation of trajectories into single-mode segments.Every project performs this step before classifying the trips. The classification system variesdepending on the project. Stenneth et al. [28] compared different artificial intelligence methodfrom which Random Forest achieved the best results. Schuessler and Axhausen [24] and Biljecki,Ledoux, and Oosterom [2] based their approach on the main principle of fuzzy logic. Stopher,Clifford, and Zhang [29] implemented a heuristic and rule-based system.This diversification shows the applicability of different methods to solve the problem of trans-portation mode classification. None of the papers deal with the automated detection of tripstart and end before collecting more detailed data. They mostly use long-term data and identifypotential trips afterwards. In this thesis, a solution for automated trip detection is favorable todecrease the energy consumption of the application and to lower the number of GPS datasetsstored on the device.
5

3 Smartphone-Based Telematics in theInsurance Industry
This chapter gives an overview of telematics, especially with regard to the insurance industry.Furthermore, different hardware solutions for telematics are described. The final part of thischapter presents an application of the insurance company Allianz, which serves as a startingpoint for this thesis.
3.1 Insurance Telematics
The term telematics (French: "Télématique") was first introduced by Simon Nora and AlainMinc in their book "The Computerization of Society" in 1978. The book intended to be a reportfor the French president regarding the growing influence of computers in the social, economicand political structures of the country.These days, the term telematics ist mostly associated with vehicle telematics. This includes theuse of telecommunication and information technology within cars or other vehicles. Examplesinclude fleet management, satellite navigation, on-board safety systems, car sharing or insurancetelematics. The latter recently gained in importance within the insurance industry.Traditional car insurance rates in Germany are based on a large number of factors. In particular,the individual risk characteristics of the customer play a significant role. They usually includethe place of residence, the vehicle type, the specified number of kilometers per year, the numberof years without a claim, the proposed drivers, the vehicle age, the tariff group, as well as thedeductible. The effect of each risk on the premium is calculated by applying historical andactuarial data. Sometimes, this type of premiums is seen as lump sum costs [9].In contrast, a Usage Based Insurance (UBI) program can offer a more flexible and individualway of calculating car insurance rates. Data like location, actual driving times and distance,acceleration and braking behavior, the time of day and the road type are put into considerationand analyzed to estimate individual and precise premiums [20].
3.2 Hardware Variations for Telematics
Two hardware types for telematics products are compared within this chapter: On-board unitsand smartphones.Both types are suitable for the majority of cars, being independent of vehicle model or manufac-turer, and can therefore be considered as two possible variations for telematics products.
6

3 Smartphone-Based Telematics in the Insurance Industry
3.2.1 On-Board-Units
On-board units are hardware components attached to a vehicle. They are usually not part of theoriginal manufacturer equipment of a car and need to be retrofitted by the driver or a professional.Early telematics products were mostly linked with on-board units and despite the release ofother hardware types they are still used in many products today. For this thesis, on-board unitsare divided into three categories:
1. Black box
2. (OBD-2-) Dongle
3. Hybrid solutions
Black boxes are fixed devices, which collect data while driving and send it to the insurancecompany. They usually involve high entry costs as the equipment must be installed by aprofessional. This also increases the time until a customer can start using the product.
Figure 3.1: Black Box C4 Max1
An exemplary black box is the C4 Max Smartbox from the manufacturer Mobile Devices (seeFigure 3.1). This black box comes with GPS sensors, an accelerometer, a gyroscope, as well asinterfaces to the vehicle’s Controller Area Network (CAN) bus. The CAN bus provides detailedinformation about the car system like speed or the status of appliances. Additionally, this blackbox includes a GSM antenna for communication via the cellular network [4].
The second category besides black boxes presents OBD-2 dongles. Most of the time, the devicescan be plugged into the OBD socket of the car by the drivers. This implies lower time and costscompared to black boxes until a product is ready to use. Dongle-based insurances are becomingmore and more popular in North Amerika and Europe. However, dongles can cause difficultieswhen getting the information from the vehicle systems because vehicle manufacturers sometimesprovide different output formats of the data [21].
An exemplary device is the C4 OBD2 dongle from Mobile Devices (see Figure 3.2). It includes aGPS module, an accelerometer, a gyroscope, as well as GSM and Bluetooth antennas [5].
The third category contains hybrid solutions, where black boxes or dongles are used to providedata to external devices. A common setup is an OBD-2 dongle connected to a smartphone via
7

3 Smartphone-Based Telematics in the Insurance Industry
Figure 3.2: Dongle C4 OBD2 [5]
Bluetooth. The C4 OBD2 dongle, for example, can be used for such a hybrid solution. Thevehicle data is transferred to an application and can be shown to the user.
3.2.2 Smartphone as a Sensor
Today’s smartphones ship with a variety of sensitive sensors, thus satisfy the requirementsfor a sensor-based application like telematics. In this chapter, the most important sensors ofsmartphones are listed which will give an insight into the possibilities of mobile devices.
Accelerometer An accelerometer measures the acceleration force applied to a smartphone. Theoutput data gives values for each of the devices axis (X, Y, Z axis). The final result includesthe gravity force of 9.81 m/s2towards the ground. The accelerometer enables the capturing ofmovement and is consequently one of the most important sensors and part of most smartphonesand tablets [25].Unit: m/s2
Gyroscope The gyroscope measures the rate of rotation around the device’s X, Y and Z axisto identify movement or heading changes. It is often used in the context of mobile games [25].Unit: rad/s
Pedometer A pedometer counts steps made by the user. Some devices contain a hardware-based sensor but step counters can also be implemented with accelerometers. The Android APIprovides a step counter returning the total of steps since the last reboot and a step detectorcommunicating a step event [25].
8

3 Smartphone-Based Telematics in the Insurance Industry
GPS Receiver The GPS consists of a ring of satellites which orbit the earth. They provideinformation for navigating or positioning. GPS is divided into two variants: The PrecisionPositioning Service (PPS) is exclusively used by authorized institutions (i.e. the US military).The Standard Positioning Service is meant for civil usage and provides a little less precise resultsthan PPS. Nonetheless, an accuracy of a few meters can be achieved. This depends on thevisibility of the GPS satellites to the device. The accuracy may dramatically decrease insidebuildings [11].Available information: Longitude, Latitude, Altitude, Speed, Accuracy
Magnetic sensor A magnetic sensor or magnetometer is a device to measure the strength anddirection of the earth’s magnetic field. It is mostly used when developing a compass [25].Unit: µT
3.2.3 Comparison of On-Board Units and Smartphones
Unlike on-board units, smartphones are originally not designed for data collection while driving.Lower integrity and consistency of data must be considered when adopting smartphones fortelematics applications. Also, data noise because of loose mounting or vibrations inside the caris inevitable. On-board units use a more reliable data source by reading the data directly fromthe vehicle system. The direct link to the car also guarantees permanent power supply to theon-board unit which again increases the integrity of the results. However, smartphones havebecome a standard approach for telematics products in the last few years.Smartphones enjoy wide acceptance and distribution all over the world and thus many peoplealready meet the hardware requirements for telematics products. They can be considered aspotential customers for insurance companies. Moreover, the installation process is much easierthan for on-board units because it is limited to a simple app download. This lowers costs andtime until a telematics product is available. Mobile platforms also provide a fast way to distributeupdates to the users.In addition to the fast and easy distribution, other functionalities of smartphones can providekey values for insurance companies. This includes contextual information of the user before orwhile driving. Telematics applications can for instance capture behavior like phoning or textingwhile driving or monitor the hours of sleep in the previous night. This information has an impacton the driver’s risk and can be used by the insurance either to calculate the insurance rate or tosensitize the user before driving [18].With mobile applications, users can access their data anywhere and anytime, which gives them acomprehensive insight in their driving behavior. This way they can learn from the app’s feedbackand act on it [30].
9

3 Smartphone-Based Telematics in the Insurance Industry
3.3 Telematics at Allianz
Multiple subsidiaries of the insurance company Allianz recently started offering new smartphone-based telematics products to their customers: Allianz Italy, Allianz Germany and AllSecur.The mobile solutions enable customers to automatically record their trips and receive a ratingon their driving style. The recording involves events like fast acceleration, harsh braking, orspeeding - besides the regular tracking of GPS. Eventually, good driving style can lead to adiscount on the insurance premium.
The internal shared services provider of Allianz AMOS (Allianz Managed Operations and Services)assists Allianz subsidiaries worldwide like Allianz Italy and AllSecur with developing mobileapplications.At the same time, the company offers a product called oneMobile which provides Allianzsubsidiaries with core features for mobile insurance applications. This allows a much faster timeto market and lower development costs. The telematics feature Good Ride, which is the startingpoint of this thesis, is part of oneMobile’s portfolio.
Figure 3.3: Start Screen Good Ride
Good Ride is an app component for Android and iOS and encourages users to track their drivingbehavior manually. Compared to the applications mentioned above, this feature offers fewerfunctionalities and is not integrated into a car insurance product. Nevertheless, Good Rideintroduces users to telematics and provides them with basic functionality to gain insight intotheir driving style to eventually drive more carefully.In the current release of Good Ride, the user has to start and stop the trip recording manuallyby pressing a button inside the app (see Figure 3.3). This activates the gathering of indicators
10

3 Smartphone-Based Telematics in the Insurance Industry
like speed, location, distance, altitude or acceleration. On completion, a detailed trip summaryincluding the route and several maximum, average and total values is shown to the user. Theuser can also access a full list of all recorded trips in the app (all components of Good Ride canbe seen in Appendix A).
This master thesis focuses on two major problems of Good Ride. First of all, Good Ride is onlyuseful from the moment tracking is activated inside the app. Users may see this as an obstaclebecause they have to perform this step every time before and after each trip. Also, it is obviousthat some users tend to forget to activate or deactivate the trip recording. This project aims tosolve this problem by applying an automatic trip detection.Apart from that, Good Ride does not distinguish between different types of transportation modes.The app shows all recorded trips in the same way and it is not transparent to the users whichmode has been used. Insurance telematics products also need to differentiate between trips ofdifferent transportation modes, as only trips with the insured vehicle type are considered in therating. Therefore, this thesis addresses the classification of the used transportation modes intravel data.
11

4 Concept: Automatic Trip Detection andClassification of Transportation Modes
The first part of this chapter explains critical terminology for this thesis. Subsequently, theconcept creation for the core functionalities of this thesis is portrayed.A three-stage process implements the core features. It includes automatic trip detection, datacollection and classification of the transportation mode. The last stage is further split into threesteps: Trajectory segmentation, classification of the segments and merging of segments to trips(see Figure 4.1).
Figure 4.1: Process overview
4.1 Terminology
Trajectory A trajectory groups all datasets which have been captured during two majorstationary phases. Start and end of these phases are determined by the automated trip detectionfunctionality explained in section 4.3. Trajectories do not differentiate between transportationmodes which means they can contain multiple modes.
Segment A segment is a period where only one mode of transportation is used. Trajectories aresegmented into single-mode segments by identifying potential transition points. The segmentsare later used to classify the transportation mode.
12

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
Trip A trip combines one or more segments. After the classification process, consecutivesegments with the same mode are merged into a trip. Trips can also contain short stationary orwalking segments in between.
4.2 Data Collection
This subchapter attends to data acquisition. One of the objectives of this thesis is the identificationof means of transport, which is why only information that is required for the recognition shouldbe collected. All additional data is not captured.
The location of the user is an example of a required information. It must be registered and storedperiodically to display the user’s route in the telematics application. The location informationis further needed for the classification (proximity of a location to stations), as described insubsection 4.4.2.
Present smartphones can determine the location of a user with the help of various methods:
Wifi Access Points One option is the localization based on Wi-Fi Access Points. Here, sur-rounding Wi-Fi Access Points are checked against a database to identify the position of a user[27]. An example for such a database is Mozilla Location Service (https://location.services.
mozilla.com). 673 million Wi-Fi networks (status of January 2017) and their positions areregistered in there. The manufacturers of famous mobile operating systems Google, Apple andMicrosoft use own databases and utilize their reach to fill them with further information. Theirsmartphones and tablets automatically scan surrounding Wi-Fi Access Points and register thenetworks in their database [33]. This method offers a considerable precise localization of users ifWi-Fi networks exist nearby. The approach is not suitable for streets outside of cities [36].
Cell-ID A smartphone recognizes surrounding transmission masts through a continuous connec-tion to mobile stations and is able to utilize them as reference points within the tracking process.This is accomplished by identifying the next transmission mast in the user’s vicinity. However,this method has a low precision from 100 meters to a few kilometers [22].
GPS Satellite Signals A GPS localization determines the position of a receiver relative toseveral GPS satellites. For that purpose, at least three satellites must be visible to the smartphone.With the aid of the duration until the particular GPS signals reach the device, the respectivedistances can be calculated and the position of the user can therefore be identified [13]. A goodvisibility of satellites enables GPS an accuracy of a few meters [10].
The described methods show big differences in their measuring precision. The localization basedon transmission masts and Wi-Fi Access points is not suitable for the planned application. Unlikethose methods, GPS works well to record the location of a user. However, possible occurringlocalization determinations with high inaccuracy must also be considered in this method. For
13

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
this reason, GPS measurements with an inaccuracy of more than 30 meters are excluded fromthe acquisition.In this thesis, the sampling rate for which the position is requested accounts to 1 second [29].
The application should further capture the velocity of a user. This is one of the most importantindicators for the classification of a segment.For example, the velocity can be calculated with the help of the time and location difference oftwo successive positions:
V elocity = Driven DistanceActivity Duration
As described earlier, neither transmission masts nor Wi-Fi Access Points are suitable for a preciselocalization of a site. However, the measurements of the GPS module do not provide satisfyingresults either. A spatial difference of several meters between the measurement and the actuallocation leads to significant imprecision in the velocity calculation results. This does not meetthe needs of a data-driven application like telematics.
Modern GPS modules in smartphones offer an alternative solution. They provide the velocityfrom the start without any needed computation. This is facilitated by the effect of Dopplershift.
Velocity information from Doppler shift Modern GPS modules contain a digital Phase-LockLoop (PLL) receiver which captures the frequency of the carrier signal from multiple satellites.This is where the Doppler shift (named after the Austrian physician Christian Doppler) isinvolved. The Doppler shift equals the difference in frequency or length of a wave for a movingobserver. A famous example is the change of tone pitch from ambulance sirens while the vehicleis passing by an observer.GPS signals identify the Doppler shift by comparing the received frequency of the PLL receiverand the known original frequency of the satellite. The difference is directly proportional to thespeed of the GPS device along the direction of the satellite. By using multiple satellites, theGPS module summarizes all velocity vectors to a single velocity vector of the device [32].
GPS modules provide a reliable way to measure the velocity during driving. They are most ofthe time even more accurate than actual car speedometers [12]. Car speedometers depend onmultiple factors like the wheel size and condition which causes inaccuracies.Due to these reasons and a low required effort, the velocity values of the GPS module arepreferred in this thesis.
In addition to location and speed, the pedometer of the device is used to gather the number ofsteps. This is required to distinguish between walking segments and segments of other modes onlow speed (as explained in subsection 4.4.2). Moreover, the steps are used to detect potentialtransition modes between two different transportation modes.
14

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
For this thesis, the storage of the step count in combination with the GPS data is reasonable.With this, every location includes the number of steps.
4.3 Automatic Detection of Trip Start and Stop
The collection of data in the telematics feature Good Ride only begins once the "Start GoodRide" button inside the app is pressed (see Figure 3.3). Users may see this as an obstacle andtend to forget to activate the trip recording, which leads to incomplete trip data. Particularly inthe field of insurance telematics, it is important to have a full picture of the customer’s drivingstyle which requires consistent trip data capturing. This chapter handles the concept creation ofautomatic trip start and end detection.
The most obvious method to obtain consistent trip data is to capture as much information aspossible during the day.However, it suffers from major drawbacks: Much more data has to be stored and processed bythe smartphone application. Time frames where the user is not moving are not useful and haveto be filtered out. Furthermore, this method requires permanent capturing of detailed data. Theconstant usage of sensors has a negative effect on the battery life of the smartphone and shouldbe prevented.
This thesis implements an alternative approach for data collection: The process is split into twostages. The first stage, the primary data collection, monitors the general movement of the userand detects the start and end of a trip. After detecting a trip start the second stage, the detaileddata collection will be initiated. This reduces the amount of data which has to be stored onthe device and analyzed in further processing. This approach also preserves battery life. Dueto differences in the procedure of start and stop detection, they are explained in two differentsections of the following chapter.
4.3.1 Detection of Trip Start
A trip is considered as started when the user leaves a location where he stayed for a longer periodand starts to walk, drive or use other transportation modes. There are different methods basedon various sensors of mobile devices to detect these transitions.
The fastest sensors which identify movement are motion sensors. For instance, the gyroscope, theaccelerometer, the gravity sensor or the pedometer can detect if a device is moving or not in afraction of a second. This information can be used to spot a potential trip start. A disadvantageis that even smaller moves can trigger the sensors and it is hard to differentiate them fromnoteworthy actions. Furthermore, it is not ensured that mobile devices are moved on trip start,for instance, when they are already in a car before trip start.
By observing the user’s location, these drawbacks can be eliminated. A trip start is only triggeredwhen the user moves away from a previous location by more than a specified distance. This
15

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
ensures that smaller movements of a device or short walks are ignored. A method to monitor theuser and to detect the user entering or leaving a location is geofencing.
Geofencing Geofencing is a technology principle that defines virtual boundaries around ageographical area. A geofence triggers actions when the observed object crosses the area borders.Example use cases for geofencing are the monitoring of humans or anti-theft protection of movableobjects or vehicles [14]. Geofencing is also important for location-based services via mobileapplications. As a result, applications can provide context-related information to the user.Within mobile applications, geofences are often created by specifying a location and a radius(usually in meters). When the user crosses the radius border the application is notified. Examplesfor usual events are entering, leaving and staying inside the geofence (see Figure 4.2).
Figure 4.2: Geofencing Events [6]
Geofencing provides an easy method to identify trip starts by ignoring minor movements andis therefore chosen for this project. The user’s location is retrieved in regular intervals andcompared to a previous major location. The trip start is determined by leaving the geofence.This project implements a geofence with a radius of 50 meters. This value turned out to bereliable during multiple tests.
4.3.2 Detection of Trip Stop
Besides the detection of the trip start, the trip end will also be monitored by the application. Atrip is considered as completed when the user reached his destination and did not continue tomove. For the same reasons as in trip start, motion sensors are not suitable for this problem.Again geofencing represents an alternative solution for identifying trip completion. A geofence iscreated to observe the user leaving the radius of the last known location. Doing this proves that
16

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
he is still in motion and the trip continues. As the trip should not be marked as completed atlow speed, a dwell time is set to only accept long breaks as trip ends.
However, the quality of GPS signals has to be taken into account in this application. The GPSsignal and its quality often fluctuate inside buildings or tunnels, and, in the worst case, a signalis not even available to the device. It is very likely to experience signal loss during subway rides.In their work about detecting trip ends in GPS data series, Du and Aultman-Hall [7] differentiateby the integrity of location data. Depending on the signal availability of GPS, the authors usedifferent dwell times. With this, they want to prevent, that two different trips are wrongly notseparated while the signal is available (when the dwell time is too high), or that a trip is cut intotwo trips during a signal loss (when the dwell time is too low).In this project, the following dwell times have been tried and tested. The application willterminate the trip recording after the specified time.
• With steady GPS signal: Trip ends after 30 minutes dwell time
• During signal loss: Trip ends after 60 minutes dwell time
4.4 Classification of Transportation Modes
The next part of this thesis deals with the transportation mode classification of the recorded trips.It is important for telematics products to determine the used transportation mode and to ignoretrips which have been performed with other means of transport than the insured vehicle. Thatis why the classification process is vital to telematics apps. In this project, five transportationmodes are considered:
• Car
• Bus
• Subway
• Train
• Walking
Furthermore, the class stationary is added to this list because it is necessary for the classification.
The process is started immediately after the completion of a trip. The trajectory is classifiedbut also previous trajectories for which the classification process has failed to start are searchedin the database and processed. Further triggers for the classification start are plausible. Anopportunity provides, for instance, the start of an application.
17

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
4.4.1 Segmentation into Single-Mode Segments
Trajectories may contain segments of different transportation modes. This is even more likelyin cities with multiple types of public transports. To identify the used transportation modesat any time, the segmentation of trajectories into so-called single-mode segments is required.According to the community research done in this field, the segmentation is a common step beforeclassifying trips. The precision of the segmentation is crucial for the success of the subsequentclassification [35].
Various methods exist for the segmentation of data series. The easiest way is to split theminto segments with the same duration. The implementation of this approach may be easy, butsignificant drawbacks are suspected regarding the classification. It is probable that the transitionfrom one transportation mode to another occurs during a segment. This results in an unreliableclassification because the characteristics of two transportation modes are mixed. Zheng et al. [37]further explains that long period segments express the features of a mode of transportation moreclearly than shorter segments. Heavy segmentation can lead to an increase of uncertainty.
In the related literature, other methods of trajectory segmentation are explained. They all try todetect the precise time of the transition between different modes of transportation.
Mountain and Raper [19] use the relative heading change and the speed to detect transitionpoints and to split trajectories into segments. However, change in speed occurs regularly formodes like driving a car and consequently, this feature is not a safe indicator for transition points.Furthermore, transitions between modes with similar velocity profiles are difficult to discern.
Another method is the segmentation by identifying stops. Biljecki, Ledoux, and Oosterom [2]use a dwell time of 12 seconds to detect a stop. This approach has been tested in this thesis.Unfortunately, additional segments are created by stops at red lights.
In their paper, Zheng et al. [37] state that short walks often accompany the transition betweentransportation modes. They see the start and end points of walk segments as potential transitionpoints and use them to split the trajectories into segments. This assumption is adopted in thisthesis.
Various indicators are suitable for the detection of walk segments. Low speed, for example, oftenrepresents walking. However, other modes can contain low speeds as well. Therefore, anotherindicator must be used.A sensor which is often used in this context is the accelerometer. This device can monitor thebody’s movement while walking and the results considerably differ from other modes (Figure 4.3).The detection of walking with the accelerometer has been difficult in tests. Using the smartphoneduring trips could not be reliably distinguished from walking.
Pedometers offer a more simple solution. These appliances are often shipped in newer devicesand count the user’s steps. This method supports the easy detection of walking or non-walkingperiods. Today’s step counters can make a solid prediction of actual steps by ignoring othermotions.
18

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
Figure 4.3: 3D acceleration in different transportation modes1
This thesis uses a combination of speed and the step counter to identify walk segments and tosplit the trajectories eventually. The speed is furthermore required to distinguish walk segmentsduring the usage of other modes like walking during a train ride.
4.4.2 Classification of a Segment
This section deals with the classification of the transportation mode for each segment. Knowingabout the mean of transport is crucial for smartphone-based telematics products in the insuranceindustry because trips with other modes than the insured vehicle need to be ignored. Furthermore,the classified mode is necessary when merging the segments into trips (see subsection 4.4.3).
In general, classification tries to identify to which of a set of categories a new object belongs.Often a training data set with objects that are already classified (mostly manually) is used tolearn the classifier. The classifier is the algorithm that implements the classification.
As previously mentioned, the classification process in this project considers six different modes:Car, bus, subway, train, walking, and stationary. At the end of the classification, a singlepredicted transportation mode has been assigned to each segment.
The process is split into two stages in this project: At first, a fuzzy logic approach is used toclassify the segments. This is inspired by Schuessler and Axhausen [24] and Biljecki, Ledoux,and Oosterom [2] who successfully implemented a classification software using fuzzy logic.
Fuzzy Logic Fuzzy logic is a theory based on many-valued logic rather than binary logic. Valuesare not only true or false but can adopt every value between 0 and 1. In fuzzy logic, problems aremodeled using linguistic terms by allowing imperfect information in a sensible way. Its approachto problem-solving mimics the way humans make decisions [15].The fuzzy system takes crisp input values and converts them to fuzzy linguistic terms in thefuzzification step. Subsequently, the fuzzy inference engine and the rules matrix are applied. Inthis step, the given input is mapped to an output using fuzzy logic. Ultimately the defuzzifi-cation step transforms the membership degree of the fuzzy sets into a crisp output value (seeFigure 4.4).
19

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
Figure 4.4: Structure of a Fuzzy Logic System [15]
Biljecki, Ledoux, and Oosterom [2] state that speed is one of the most important and obviousindicators of a transportation mode. This thesis uses the maximum and average speed todistinguish between transportation modes. Furthermore, the number of meter per step is used todifferentiate walking and low speeds using other modes.
Walking and stationary segments often can be easily distinguished and the fuzzy classifier returnshigh values for these segments. Unfortunately, the fuzzy system cannot easily differentiatebetween other modes like car, bus, subway and train. A further step is needed to identify themodes with high certainty.
Stenneth et al. [28], Biljecki, Ledoux, and Oosterom [2] and Stopher, Clifford, and Zhang [29]apply GIS data to identify important locations near systems of public transport. EspeciallyStenneth et al. [28] was able to drastically increase the classification accuracy from 76 % to 93 %by using GIS data.This thesis also uses GIS data in the second stage of the classification process by comparing thestart and end point of the segment with stations of the public transport. This step is optional,depending on the results of the fuzzy system. It is only executed to distinguish between similarmotorized classes and not used when the fuzzy system identifies a non-motorized mode.
A training data set of 94 segments is used to build and optimize the classification process. Thisdata was collected during the time span of this thesis and manually labeled with the usedtransportation mode.
4.4.3 Merging of Segments into Trips
The segmentation identifies potential transportation mode changes and splits the trajectoriesinto segments. The following section describes the merging of segments into trips. This is thefinal step of the classification process.
This process applies three rules:
1. Consecutive segments of the same transportation mode belong to a single trip and aremerged in the first step.
20

4 Concept: Automatic Trip Detection and Classification of Transportation Modes
Figure 4.5: Segment Merging
2. Segments which contain a short walk or stop are added to the trips. They may occurduring stops at a red light and at (bus) stations, as well as traffic jams and walking. Thesesegments are called intermediate segments in this thesis and are rather short and thereforeconsidered as part of a trip with another transportation mode. Only segments with a lengthof below or equal 15 minutes and of the transportation modes Stationary and Walkingqualify for intermediate segments. This time span includes most stops at red lights, stationsand respects short traffic jams but ignores long pauses.
3. All intermediate segments at the beginning or end of a trip are deleted.
When the process identifies a segment for which none of these rules apply, the trip’s completionis considered. The current segment then sets the beginning of a new trip.
All detected trips are stored in the local database on the mobile device. This guarantees an easyloading of the data shown in the mobile application.
21

5 Development of the Mobile Application
As explained in chapter Comparison of On-Board Units and Smartphones, smartphones aresuitable for telematics products as they offer a wide range of sensors for collecting the necessarydata. They also provide an easy way to distribute apps and to show the recorded trips to theusers which makes mobile devices a powerful platform for telematics products. This chapterdescribes the design and implementation of the mobile application prototype of this thesis.
5.1 Requirements and Concept
The conceptual design includes some functional and technical requirements that must be fulfilledby the application. The requirements and the corresponding concepts are described in thefollowing sections.
5.1.1 Persistence of Data
All collected and classified data is stored in a local database of the mobile device. This guaranteesthat the application can initially be used without the need for a server that stores and processesdata.In doing so, the focus lies on technologies that are available for both Android and iOS. Theobjective is to enable convergences between the developments of applications on both mobileplatforms.
5.1.2 Modular Development
Tracking and classification methods should be developed modularly to facilitate a simple integra-tion into other applications. When working with Android, it is common to integrate softwarecomponents from third parties as libraries. To use the components, they must be declared as adependency in the application.
5.1.3 Background Activity
The target application is supposed to record and digest trips consistently and automatically.This is only possible through background activity that allows the identification, recording andclassification of trips without the initiative of the user. The goal is for the user to notice littleduring the processing of data.
22

5 Development of the Mobile Application
5.1.4 Activate and Deactivate Tracking
The application should also include an option for the user to activate or deactivate the trackingof trips. Otherwise, the detection and tracking of trips would be active at any time which mayhave an adverse impact on the smartphone’s battery life.
5.1.5 Trip List
The mobile application should allow the user to get an overview of all performed trips.In this prototype, the initial screen of the app lists all trips. The list is shown in chronologicalorder with the newest trip on top.Each trip element shows fundamental information: The transportation mode, the start and endtime, as well as the name of the city or streets of the start and end points. By clicking on onethe elements, the screen of the detailed trip information is started.
5.1.6 Trip Details
Telematics applications often contain a detailed presentation of individual trips. Relevant detailsare the route, the city or street names of start and end points and different indicators of thedriving behavior.
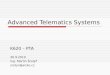
Figure 5.1: Napoleon’s Russian campaign in 1812-1813 from Charles Joseph Minard [16]
A famous example for visualizing multivariable data in an infographic is the map showingNapoleon’s Russian campaign in 1812-1813 from Charles Joseph Minard (see Figure 5.1). Thisgraphic shows the successive losses in men of the French army during their retreat from Moscow.Six types of data are included in two dimensions: The number of Napoleon’s troops, distance,temperature, latitude and longitude, direction of travel, and the location relative to specific dates.
23

5 Development of the Mobile Application
In Figure 5.1, area 1 shows the route with the line thickness representing the size of the Frencharmy. Area 2 furthermore shows the temperature parallel to the route [16].
The app also needs to display different types of data. It is limited to the data which is collectedfor the classification of transportation modes (see section 4.2). This refers to the route with theGPS points including speed, maximum and average speed as well as the transportation mode.Minard’s approach of visualization is adopted in this project. The screen of trip details inthe prototype is split into two parts: Area 1 shows the route on a map and Area 2 presentsinformation along the course of the trip (see Figure 5.2).
Figure 5.2: Application Wireframe
5.2 App Implementation
This chapter explains in detail how the mobile application is developed. At first, the developmentsetup is presented. This also includes solutions for modularity and persistence of data. Thesubsequent sections deal with the implementation of the app user interface, including the triplist and trip details.
5.2.1 Development Setup
The application is developed using the standard IDE for Android applications Android Studio(Version 2.2). An LG Nexus 5X with Android 7.1.1 is used as a development and testing device.The minSdkVersion is 21, which means that the application can run on devices with Android 5.0
24

5 Development of the Mobile Application
(API 21) and higher. The application is developed with Java, which is the default programminglanguage for Android applications.
As described in subsection 5.1.2, the application needs to be developed modularly to allow thereuse of the telematics functionality in other applications. This thesis realizes modularity byseparating the telematics features into a standalone Android module. The module can eventuallybe exported as a library and distributed.
Furthermore, the database solution Realm (https://realm.io) is used to realize the localdatabase. This SQLite-based library is available for Android and iOS and allows an easyintegration into mobile apps. It further provides a higher reading and writing performance thanstandard SQLite (Android) and CoreData (iOS).
Due to the requirement to run in the background, services from the Android platform are utilizedfor trip detection, tracking and classification. A service is meant for long-running operationsand does not include a user interface. It must be noted that the operating system kills apps andcorresponding regular services at low-memory.
To circumvent this behavior, the application uses foreground services for crucial components liketrip detection and tracking. The foreground service has a higher priority than regular servicesand is not affected by the memory release rule. This way the trip detection and tracking can bekept alive at any time. For foreground services, it is required to show a notification to the userto inform him about the running background task [26].
5.2.2 Implementation of the Trip List
The trip list is implemented as a grid view. This way it is possible to arrange multiple tripsnext to each other horizontally (see Figure 5.3). As originally intended, the list is shown inchronological order and also grouped in different sections. Each section represents a single daywhich supports easy scrolling through the trips list. Each trip item shows the city or street nameof the start and end point. Furthermore, it includes the time span of the trip. Every modetype is visualized with a different icon and background color to enable the fast recognition oftransportation modes.
The icons are provided by the Google Material Design Icon Library (https://material.io/
icons). They are meant for material design applications on all platforms and are often used inAndroid applications. The icon library is published under the Apache License, Version 2.0 andtherefore can be used without costs.
In addition to the trips list, the screen contains a menu button for activating or deactivating theservices for trip detection and tracking (see the second toolbar icon from the right Figure 5.3).
Selecting a grid view item opens the trip details screen.
25

5 Development of the Mobile Application
Figure 5.3: Trips List
5.2.3 Implementation of the Trip Details
As explained earlier, the user interface of the trip details is split into two parts.
Figure 5.4: Trip Details
The upper part includes the map view and the route. The Google Maps Software Development Kit(SDK) (available for Android, iOS and web; https://developers.google.com/maps/android)supports the developer to easily integrate a map into the application. The SDK provides essentialfunctionalities regarding base maps, display of routes and markers on the map. At the sametime, the map shows information like important geographic sites or subway stations.
26

5 Development of the Mobile Application
Figure 5.5: Maps Styles
Furthermore, the SDK allows the adjustment of map styles and the amount of shown information.The styling wizard from Google (https://mapstyle.withgoogle.com) is a tool which supportsadjusting and configuring these Maps styles. Following these changes, the configuration can bedownloaded as a JSON file and integrated into the Android application. Within this project,various style variants have been tested (see Figure 5.5):
Version 1 shows the default style of Google Maps. During short user tests with five persons, therestaurant information and the colors have been assessed as distracting.Version 2 shows a darker UI approach, which felt unfamiliar to the test users. Also, it was hardto recognize the given extract of the city. However, the good visibility of the route was considereda plus.In the last version, the saturation of the map’s colors was lowered to make the route stand outand to minimize the distraction of buildings. In addition to that, the number of displayed placeslike restaurants or streets was reduced. In short user tests, this variant has been ranked as thebest of the three versions.
The lower part of the UI shows a little dashboard with the classified transportation mode, aswell as the maximum and average speed of the trip (see Figure 5.4). By clicking on one of thedashboard items, detailed information is displayed:
The transportation mode view shows the duration and distance values of all the modes fromthe selected trip (see Figure 5.6 a). By this the user can easily see the proportions of all usedtransportation modes.
The detailed maximum speed section displays a line chart containing the velocity curve duringthe trip. The diagram also includes a threshold line with the value of the maximum speed.
27

5 Development of the Mobile Application
Figure 5.6: Trip Detailed Information
Furthermore, the application allows the user to interact with the values of the line chart. Bypicking a value, the velocity is shown at the corresponding coordinates of the map above (seeFigure 5.6 b). This interaction method links the diagram with the map and increases theinformative value of the application.
The average speed section works just like the maximum speed section. Only the threshold lineshows the average speed instead of the maximum speed (see Figure 5.6 c).
The line charts are implemented with the open source library MPAndroidChart (https://
github.com/PhilJay/MPAndroidChart; Apache License, Version 2.0).
28

6 Implementation of the Concept
After chapter 4 explained the approach to detect trip starts and stops and to classify thetransportation modes, this chapter describes the implementation of the concept.
6.1 Implementation of the Automated Trip Detection
The following subchapter deals with the implementation of the automatic trip detection togenerate trajectories. As mentioned earlier, geofencing is used for this functionality. Androidoffers the Geofencing API to create geofences in Android applications. The detection of geofenceentries or exits was not reliable during tests in this project, which is why an own implementationof geofencing is used.
Furthermore, the application implements the trip detection functionality as a foreground service(see Figure 6.1). The service is either started by pressing the activate button in the trip listscreen (as described in subsection 5.2.2) or automatically after a reboot of the device. The latteris enabled by the BootUpReceiver (also shown in Figure 6.1). The BootUpReceiver extends theBroadcastReceiver class and listens to system events like the successful reboot of a device.
Figure 6.1: Overview of Services
Detection of Trip Start
The implemented trajectory detection service (as displayed in Figure 4.1) requests periodic loca-tion updates from the LocationManager in Android (more information at https://developer.
29

6 Implementation of the Concept
android.com/reference/android/location/LocationManager.html). A new location updateis generated every five seconds.The coordinates of the first received location update are used as the initial position of thegeofence. Then, the distance between this location and following new updates is compared. Ifthe distance extends the selected radius (50m; see section 4.3) it is assumed that the user left hislocation and started a potential trajectory.The Tracking Service (as shown in Figure 4.1) is initiated with the detection of a trajectory start.This component is responsible for the collection of necessary data. The trajectory end detectionis activated at the same time.
Detection of Trip End
The trajectory end detection process still receives the location updates initiated by the startdetection step and also uses them for geofence creation. Not the exit is relevant in this step,but wether the user stays inside the geofence. The trajectory completion is triggered after aspecified dwell time at one location (see section 4.3; with steady GPS signal: 30 minutes; duringsignal loss: 60 minutes) . For this project, the Countdown Timer of Android is implemented.The tracking of the current trajectory is terminated at countdown termination. Furthermore,the trajectory start detection is triggered again to identify further trajectories.
6.2 Implementation of Data Collection
The collection of raw data is triggered after detecting a trajectory by the Detection Service (seeFigure 6.1). The service is called Tracking Service and is implemented as a foreground servicedue to the necessity of constant tracking.section 4.2 described which data to collect:First of all, the location is acquired by GPS. This also includes the Doppler shift based speed.The provided location update includes a lot of useful information which is used in this project(see Table 6.1).
Also, the step count is needed for the classification process. Various modern Android smartphonesprovide this information through an integrated pedometer which can be implemented by usingthe sensor manager from the Android platform. The application then merges the current stepcount (usually the total steps since the last reboot) with the location information and storesthem in a single record within the database.
6.3 Implementation of Transportation Mode Classification
The classification process is initiated either by finishing a trip or at app start (see Figure 6.1).The software component is implemented as Android services such as the trajectory detectionand tracking. Contrary to the other classes, it does not implement a Foreground Service but
30

6 Implementation of the Concept
Table 6.1: Attributes Location [17]
Android Location Attributes
Accuracy Estimated accuracy of this location, in meters
Altitude Altitude if available, in meters*
Latitude Latitude, in degrees
Longitude Longitude, in degrees
Speed Speed if it is available, in meters/second over ground
Time UTC time of this fix, in milliseconds since January 1st, 1970
Bearing Bearing, in degrees*
Elapsed Realtime Nanos Time of this fix, in elapsed real-time since system boot*
*not used in this approach
extends the base class Service. This is due to the lower priority and urgency of the classificationcompared to trip detection and tracking. The operating system may terminate the classificationprocess during a low-memory situation but a restart is easily possible at a later time withoutany problems. Furthermore, a simple service does not require a notification to be shown to theuser.
6.3.1 Segmentation into Single-Mode Segments
As described in subsection 4.4.1, trajectories have to be split into single-mode segments beforeclassifying. The identification of walking segments serves as a method to detect potentialtransition points between different transportation modes. A combination of speed and the stepcounter is employed for this purpose.
The local database contains the location points including the current step count since the lastreboot (see Table 6.2). The program iterates through all points of the trajectory and looks forpossible transition points into or out of walking segments.A possible transition point into a walking segment is considered when the speed falls below 12km/h and the step count rate exceeds 0.1 steps per second. For the step count rate, the last fiverecords are used and averaged.A possible transition point out of walking is considered when the speed exceeds 12 km/h and thesteps count rate falls below 0.1 steps per second.Every transition point creates a new segment and all subsequent points are put into this segment.As a result, the trajectory is split into a list of segments which can then be classified in the nextstep.
31

6 Implementation of the Concept
Table 6.2: Example datasets of trajectories
Time Longitude Latitude Altitude Accuracy Speed Steps
18:01:49 11.66640887 48.12329469 573 3 2.32 2050
18:01:50 11.66642346 48.12330811 573 3 3.12 2053
18:01:51 11.66643002 48.12331672 573 3 4.46 2059
6.3.2 Segment Classification
As explained in subsection 4.4.2, the classification is implemented by using a combination offuzzy logic and GIS data.
The fuzzy logic procedure utilizes different features to find out which transportation mode wasprobably used in a segment. This is done by calculating the level of confidence (usually a valuebetween 0 and 1) for a certain class. In this thesis, this value is interpreted as the level ofcertainty that the transportation mode was used.
The fuzzy system is implemented with a Java implementation of fuzzy logic: jFuzzyLogic(http://jfuzzylogic.sourceforge.net). This library is available under the Apache License(Version 2.0) and provides the essentials for fuzzy systems. It can be configured by using thestandardized Fuzzy Control Language (FCL).
In this project, the gathered training data set including 94 manually labeled segments is appliedto create and optimize membership functions and rules.
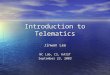
Figure 6.2: Membership Function Maximum Speed
Figure 6.2 shows the membership function for maximum speed. The fuzzification step transfersthe inserted value into linguistic terms like very low, low, medium, high and very high basedbased on this function. This is also done for the indicator average speed (see Figure 6.3). The
32

6 Implementation of the Concept
membership function of step rate just differentiates between human and nonhuman values (seeFigure 6.4).
Figure 6.3: Membership Function Average Speed
The fuzzy system applies a set of rules to the fuzzified values of the input parameters. Thisproject has defined 23 If-Then rules, which are based on the knowledge collected in the testingdata set of 94 segments (see Table C.1). The results from all the individual rules are thentransferred to a single, crisp output value by the defuzzification step. Here, the membershipfunction of the transportation modes is applied (see Figure 6.5). Due to the difficult distinctionof motorized modes, the values of car, bus, train and subway mostly overlap in this figure.
The segments are classified by executing the fuzzy system with the calculated features. Thesefeatures (average speed, the maximum speed and the rate of steps) are determined at thebeginning of the classification procedure for each segment. After the execution, the fuzzy systemreturns a list with the level of confidence for each transportation mode.
Figure 6.4: Membership Function Meter per Step
33

6 Implementation of the Concept
Tests have shown that the fuzzy classifier can detect stationary or walking segments with highcertainty. The system, therefore, returns high values for them and values of 0 for other modes.However, the modes car, bus, subway and train cannot be clearly distinguished by the fuzzysystem. The library often returns similar values for all of the four modes.
Figure 6.5: Membership Function Transportation Mode
As mentioned earlier, another step is needed to identify motorized modes. This project usesthe Here Maps API (https://developer.here.com) to query stations of public transport byusing start and end points of segments. Here Maps provides the Transit API (through a RESTservice), which returns the stations that are close to a provided location. Each station includes alist of transit lines that are served at this stop or station.In this application, the returned list of the fuzzy system is checked against the provided data ofHere Maps. The program looks for equal transportation modes close to the start and the endlocation of the segment. A maximum distance of 75 meters from the start or end point to thestation is defined for this project. If a possible transit line is found, the level of confidence of thecorresponding transportation mode is increased; either by 0.5 when the sum of the distance fromthe start and end point to the station is smaller than 50 meters or by 0.25 when the distance issmaller than 150 meters. If no matching transit lines are found, the level of confidence for carswill increase by 0.5. Eventually, the transportation mode with the highest level of confidence isselected as the predicted mode.
The classification process assigns a single mode of transportation for each segment. The segmentswith the classified modes are stored in the local database on the mobile device and later retrievedby the trip merging process.
6.3.3 Merging of Segments into Trips
The implementation of the trip merging has the goal to generate trip objects from previouslysplit and classified segments.The program iterates through all segments of a trajectory and applies three rules, as explained
34

6 Implementation of the Concept
in subsection 4.4.3.The results of this step are stored in the local database and can be seen by the user within theapp. The trip objects include the classified segments, the start and end point of the trip, thetransportation mode and values for maximum and average speed as well as the distance (seeFigure 6.6).
Figure 6.6: Trip Object Class diagram
35

7 Discussion
This thesis implements two crucial functionalities for the mobile telematics feature of AllianzGood Ride: The automatic trip detection and the classification of transportation modes. Thesefunctionalities are bundled in the developed mobile application prototype which manages thewhole life cycle of the process. This also includes data collection and storage, as well asvisualization of trip data within the app. The prototype is developed in a modular way. Thisallows the integration of the telematics features into other applications without much effort,which has been a requirement beforehand and is fulfilled by this thesis.
This project conceptualizes and develops an approach to identify trip starts and ends by applyinggeofences. It allows ignoring of unimportant phases, in which the user is not moving, and therecording of data which is meaningful for this application. This approach shows that the amountof data stored on the mobile device can be reduced. It also supports the saving of battery lifeby decreasing the number of location updates. A further beneficial element of this thesis is theconsideration of signal shortages in the trip end detection by applying an increased dwell timevalue after which the trip is marked as completed. This was not always taken into account fromother related projects though it is an important functionality to continue tracking during a signalloss.
Furthermore, the pedometer of smartphones is used to support the segmentation and later theclassification process of this thesis. This enables a simple but effective identification of thetransition into or out of walking segments. Similar projects do not use the pedometer. However,they identify walking segments by using indicators like speed or acceleration which was notefficient for this project. The adoption of the step counter enables a clear distinction betweenwalking segments and segments of other modes with low speed.
There are also some possible improvements for this thesis. In the classification process, the startand stop points of segments are compared with a remote database containing all stations ofpublic transport. With this, the motorized modes are distinguished. This approach fails when amode of transport like bus or tram stops far from the usual station. When this happens, thestations cannot be associated with the segments anymore and the classification may return afalsified result. This could be solved by not only comparing the start and end points but alsoseveral points within the trip with the routes of public transport. Furthermore, car segmentswhich start and stop close to stations of public transport may currently be classified as a modeof public transport. To prevent this, a more sophisticated use of GIS data or speed indicators isneeded.
The fuzzy logic approach of this thesis provides satisfying results when differentiating betweenstationary, walking or motorized modes. Unfortunately, the difference when distinguishingbetween all four motorized modes is not very significant. In most of the cases, the system returns
36

7 Discussion
similar values for all of them. The final results, therefore, rely mostly on the output from theGIS data implementation. The informative value of the fuzzy logic step especially regardingmotorized modes could be increased by further optimizing the membership functions and thefuzzy rules set.
37

8 Conclusion and Outlook
This thesis focuses on the conceptional design and implementation of a mobile application forautomatic detection of trips and classification of the mean of transport.To detect the trip start and stop and to consequently start the tracking of the trip, the principleof geofencing is used. By this, only the relevant periods of traveling are recorded. After thecollection of data, the three-stage classification process is applied:
At first, the trajectories are split into single-mode segments, hence the phases contain only oneused mode of transport. Therefore, it is assumed that walking is required for transitioningbetween different modes. This information is gained by a combination of GPS data and thepedometer of the mobile device.
The second step deals with the classification of the segments. Six transportation modes areconsidered in this project: Car, bus, train, subway, walking and stationary. The classificationprocess is further divided into two stages. At first, a fuzzy system applies calculated features likemaximum speed, average speed and meter per step, on predefined membership functions andrules. Consequently, the level of confidence for each mode is determined.
Depending on the results of the first step and to distinguish especially motorized means oftransport, geographic information concerning the stations of public transport is used to identifythe used mode.
The result of the process is a single predicted mode for each segment. The classification systemwas built and optimized using 94 collected and manually labeled segments.
After the classification of the segments, the last step is applied. It includes the merging ofsegments into trip objects which are eventually shown in the mobile application.
Besides the concept and the implementation of the trip detection and transportation modeclassification, a prototype for the platform Android was designed and implemented. This mobileapplication bundles the results of this thesis by integrating the two core functionalities of thisproject.
To conclude, this thesis shows how the automatic trip detection and classification of transportationmodes can be implemented and integrated into mobile applications. The results of this projectcan be employed by Allianz to further improve their telematics feature Good Ride.
Outlook
This master thesis provides a solid basis for further developments in the field of smartphone-basedtelematics. This section gives an outlook on three potential enhancements.
38

8 Conclusion and Outlook
The created application can successfully detect trips, identify the used mean of transport and showthe collected information of single trips to the user. A possible add-on could be historical tripsstatistics within the app. The so far available data, like driven distance, the used transportationmode or the velocity of single trips can be aggregated to show the user statistics for the lastseven days, the last month or the last year. This way, the user can gain insight into his drivingbehavior for a longer period than just a single trip. Telematics applications often include sucha feature so the user can see changes in his driving behavior, which motivates for continuouscareful driving.
A further idea is the detection of specific driving events. Examples are fast accelerating, dangerousbraking events or the speed while turning corners. These events are crucial for rating the drivingbehavior of car insurance customers. If the GPS data is sufficient for this functionality or if othersmartphone sensors like the accelerometer or the gyroscope need to be adopted, would need tobe examined in a further project.
In addition to the telematics feature Good Ride, the oneMobile product of Allianz provides an appcomponent called "Find my car". This component enables the user to save the location of a parkedcar manually and to navigate back at a later time. A combination of the functionality of GoodRide and Find my Car is plausible in the future. In that case, the already available detection of atrip end can be used to save the car’s location and to show the information to the user, if necessary.This automated approach may improve the usefulness compared to the current implementation.
39

Bibliography
[1] AllSecur BonusDrive Kfz-Versicherung. url: https://www.allsecur.de/telematik/
(visited on 01/14/2017).
[2] Filip Biljecki, Hugo Ledoux, and Peter van Oosterom. “Transportation Mode-based Seg-mentation and Classification of Movement Trajectories”. In: Int. J. Geogr. Inf. Sci. 27.2(Feb. 2013), pp. 385–407. issn: 1365-8816. doi: 10.1080/13658816.2012.692791. url:http://dx.doi.org/10.1080/13658816.2012.692791.
[3] BonusDrive auf der Überholspur. url: https://www.allianzdeutschland.de/bonusdrive-
auf-der-ueberholspur/id_79115498/index (visited on 01/14/2017).
[4] C4 Max Smartbox new - Mobile Devices. url: http://www.mobile-devices.com/c4-
max-smartbox-new/ (visited on 01/22/2017).
[5] C4 OBD2 Dongle - Munic.Box - Mobile Devices. url: http://www.mobile-devices.com/
our-products/c4-obd2-dongle/ (visited on 01/22/2017).
[6] Creating and Monitoring Geofences | Android Developers. url: https://developer.
android.com/training/location/geofencing.html (visited on 01/07/2017).
[7] Jianhe Du and Lisa Aultman-Hall. “Increasing the accuracy of trip rate informationfrom passive multi-day GPS travel datasets: Automatic trip end identification issues”. In:Transportation Research Part A: Policy and Practice 41.3 (Mar. 2007), pp. 220–232. url:https://ideas.repec.org/a/eee/transa/v41y2007i3p220-232.html.
[8] IT Finanzmagazin. PAYD: Generali testet Mobility-App in der Praxis – Bessere Smartphone-Software mithilfe der Crowd – IT Finanzmagazin. url: http://www.it-finanzmagazin.
de / payd - generali - testet - mobility - app - in - der - praxis - bessere - software -
mithilfe-der-crowd-37262/ (visited on 01/14/2017).
[9] Gesamtverband der Deutschen Versicherungswirtschaft e.V. So setzt sich der Versicherungs-beitrag für einen Pkw zusammen. Aug. 17, 2016. url: http://www.gdv.de/2016/08/
wie-setzt-sich-eigentlich-ein-kfz-versicherungsbeitrag-zusammen (visited on01/06/2017).
[10] GPS Accuracy. National Coordination Office for Space-Based Positioning, Navigation, andTiming. 2016. url: http://www.gps.gov/systems/gps/performance/accuracy (visitedon 01/21/2017).
[11] GPS :: global positioning system :: GPS-System :: ITWissen.info. url: http://www.
itwissen.info/definition/lexikon/global-positioning-system-GPS-GPS-System.
html (visited on 01/23/2017).
[12] How accurate is a GPS-based speedometer? GPS Systems. url: http://gpssystems.net/
accurate-gpsbased-speedometer/ (visited on 01/21/2017).
40

Bibliography
[13] How does GPS work? physics.org. url: http://www.physics.org/article-questions.
asp?id=55 (visited on 01/21/2017).
[14] ITWissen.info. Geofencing. url: http://www.itwissen.info/definition/lexikon/
Geofencing-geofencing.html (visited on 01/07/2017).
[15] E. Kozlowska. Basic principles of fuzzy logic. 2012. url: http://access.feld.cvut.cz/
view.php?cisloclanku=2012080002 (visited on 01/20/2017).
[16] Norbert Landsteiner. Minard: Napoleon’s Retreat From Moscow (Russian Campaign 1812-1813). mass:werk. 2013. url: http://www.masswerk.at/minard/ (visited on 01/21/2017).
[17] Location | Android Developers. url: https://developer.android.com/reference/
android/location/Location.html (visited on 01/20/2017).
[18] Rufeng Meng, Chengfeng Mao, and Romit Roy Choudhury. Driving Analytics: Will it beOBDs or Smartphones? Tech. rep. University of Illinois.
[19] David Mountain and Jonathan Raper. Modelling Human Spatio-temporal Behaviour: aChallenge for Location-based Services. Tech. rep. Geographic Information Science Group,Dept Information Science, 2001.
[20] National Association of Insurance Commissioners. Usage-Based Insurance and Telematics.2016. url: http://www.naic.org/cipr_topics/topic_usage_based_insurance.htm
(visited on 01/06/2017).
[21] OBD Aftermarket Telematics Subscribers to Exceed 117 Million Globally by 2019 | ABIResearch. url: https://www.abiresearch.com/press/obd-aftermarket-telematics-
subscribers-to-exceed-1/ (visited on 01/22/2017).
[22] Positioning. CartouCHe - Cartography for Swiss Higher Education. 2012. url: http:
//www.e- cartouche.ch/content_reg/cartouche/LBStech/en/html/LBStechU2_
poslabel1.html (visited on 01/21/2017).
[23] Sasank Reddy et al. “Using Mobile Phones to Determine Transportation Modes”. In: ACMTrans. Sen. Netw. 6.2 (Mar. 2010), 13:1–13:27. issn: 1550-4859. doi: 10.1145/1689239.
1689243. url: http://doi.acm.org/10.1145/1689239.1689243.
[24] Nadine Schuessler and Kay Axhausen. “Processing Raw Data from Global PositioningSystems Without Additional Information”. In: Transportation Research Record: Journal ofthe Transportation Research Board 2105 (2009), pp. 28–36. doi: 10.3141/2105-04. eprint:http://dx.doi.org/10.3141/2105-04. url: http://dx.doi.org/10.3141/2105-04.
[25] Sensors Overview | Android Developers. url: https://developer.android.com/guide/
topics/sensors/sensors_overview.html (visited on 01/23/2017).
[26] Services | Android Developers. url: https://developer.android.com/guide/components/
services.html (visited on 01/21/2017).
[27] Tom Simonite. Wi-Fi Trick Gives Devices Super-Accurate Indoor Location Fixes. 2015.url: https://www.technologyreview.com/s/542561/wi-fi-trick-gives-devices-
super-accurate-indoor-location-fixes/ (visited on 01/21/2017).
41

Bibliography
[28] Leon Stenneth et al. “Transportation Mode Detection Using Mobile Phones and GISInformation”. In: Proceedings of the 19th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems. GIS ’11. Chicago, Illinois: ACM, 2011,pp. 54–63. isbn: 978-1-4503-1031-4. doi: 10.1145/2093973.2093982. url: http://doi.
acm.org/10.1145/2093973.2093982.
[29] Peter Stopher, Eoin Clifford, and Jun Zhang. Deducing mode and purpose from GPS data.English. Article; Article/Working paper. [Sydney] : Institute of Transport and LogisticsStudies, 2008.
[30] Telematics apps increasingly replacing ‘black box’ hardware. 2016. url: http://www.
fleetnews . co . uk / news / fleet - industry - news / 2016 / 06 / 02 / telematics - apps -
increasingly-replacing-black-box-hardware (visited on 01/25/2017).
[31] Telematik Tarif bei der Kfz-Versicherung - Finanztip. 2017. url: http://www.finanztip.
de/kfz-versicherung/telematik-tarif/ (visited on 01/14/2017).
[32] Jan Van Sickle. Doppler Shift: GPS and GNSS for Geospatial Professionals. The Pennsyl-vania State University. url: https://www.e-education.psu.edu/geog862/node/1786
(visited on 01/18/2017).
[33] Steven J. Vaughan-Nichols. How Google–and everyone else–gets Wi-Fi location data. ZDnet.2011. url: http://www.zdnet.com/article/how-google-and-everyone-else-gets-
wi-fi-location-data/ (visited on 01/18/2017).
[34] HUK-COBURG Versicherungsgruppe. Telematik: Mit dem „Smart Driver Programm“ be-lohnt die HUK-COBURG sicheres Autofahren | HUK-COBURG Versicherungen. url:https : / / www . huk . de / presse / pressemitteilungen / presseinfos - 2016 / smart _
driver.jsp (visited on 01/14/2017).
[35] Linlin Wu, Biao Yang, and Peng Jing. “Travel Mode Detection Based on GPS RawData Collected by Smartphones: A Systematic Review of the Existing Methodologies”.In: Information 7.4 (2016). issn: 2078-2489. doi: 10.3390/info7040067. url: http:
//www.mdpi.com/2078-2489/7/4/67.
[36] Fred Zahradnik. How Does a Wi-Fi Positioning System Work? 2016. url: https://www.
lifewire.com/wifi-positioning-system-1683343 (visited on 01/21/2017).
[37] Yu Zheng et al. “Learning Transportation Mode from Raw GPS Data for GeographicApplication on the Web”. In: WWW 2008. WWW 2008, Apr. 2008. url: https://
www.microsoft.com/en-us/research/publication/learning-transportation-mode-
from-raw-gps-data-for-geographic-application-on-the-web/.
42

Appendix
A. Screenshots Good Ride
B. Screenshots Prototype
C. Rules of the Fuzzy System
43

Appendix
A. Screenshots Good Ride
Figure A.1: Good Ride - Start
44

Appendix
Figure A.2: Good Ride - History
45

Appendix
Figure A.3: Good Ride - Details
46

Appendix
B. Screenshots Prototype
Figure B.1: Prototype - Trip List
47

Appendix
Figure B.2: Prototype - Trip Information
48

Appendix
Figure B.3: Prototype - Trip Maximum Speed
49

Appendix
Figure B.4: Prototype - Trip Average Speed
50

Appendix
Figure B.5: Prototyp - Trip Mode
51

Appendix
C. Rules of the Fuzzy System
Table C.1: Rules of the Fuzzy System
Maximum Speed Average Speed Steps per Meter Mode
Very low Very low - Stationary
Low - Human Walking
Low - Not Human Car
Low - Not Human Bus
Medium - - Car
Medium - - Bus
Medium - - Train
Medium - - Subway
High - - Car
High - - Bus
High - - Train
High - - Subway
- Medium - Car
- Medium - Bus
- Medium - Train
- Medium - Subway
- High - Car
- High - Train
- High - Subway
Very High - - Car
Very High - - Train
- Very High - Car
- Very High - Train
52