Embed Size (px)
Citation preview

An integrated framework for formal development of open
distributed systemsq
Issa Traorea,*, Demissie Aredob, Hong Yea
aDepartment of Electrical and Computer Engineering, University of Victoria, Victoria, BC, Canada V8W 3P6bNorwegian Computing Center, P.O. Box 114 Blindern, N-0314 Oslo, Norway
Abstract
This paper contributes to the discussion on issues related to the formal development of open distributed systems (ODSs). Deficiencies of
traditional formal notations in this setting are highlighted. We argue that there is no single formalism exhibiting all the features required to
capture properties of ODSs. As a solution, we propose an integrated development framework that involves two notations: the Unified
Modeling Language and the Prototype Verification System. We discuss the motivation for the choice of these notations, provide an overview
of a CASE tool we have developed to support the proposed framework, and present a case study to demonstrate usability of our approach.
q 2003 Elsevier B.V. All rights reserved.
Keywords: Formal methods; Open distributed systems; Unified Modeling Language; Prototype Verification System; Multi-formalism; Object-orientated
programming
1. Introduction
Motivated by the need for modeling the dynamic
features of object-oriented programming languages and
openness in distributed applications, the study of open, and
dynamically extendable systems has become a very
popular research area. In fact, since late 1980s, much
research within theoretical computer science has been
directed towards this kind of systems. The emphasis has
mainly been put on semantic issues; in particular, on how
such systems should be represented faithfully and fully
abstracted. The emphasis in our work is not on the
semantics of systems, rather on the formal system
development.
On one hand, most specification techniques supporting
the development of open distributed systems (ODSs), e.g.
the Unified Modeling Language (UML) [6], lack formal
semantics and the rigorous reasoning facilities necessary for
formal development of software systems. On the other hand,
the existing formal development methods suffer from
certain limitations, which constrain their application to
large scale projects in the industrial settings, especially their
esoteric feature is a major obstacle. Moreover, we are not
aware of any conventional formal development method that
is capable to fully handle the flexibility, extendability and
dynamic features characterizing contemporary distributed
systems. In RMODP [4], formal description techniques such
as LOTOS, Z, SDL and Estelle are proposed for the
specification of systems from various viewpoints. Yet, as
pointed out in Ref. [1], these languages are only partly
satisfactory.
Taking the above remarks into account, the challenge is
to build a development framework and a supporting CASE
tool that exhibits the following capabilities:
– can be grasped and used in an industrial context;
– supports description of major aspects such as openness
and dynamic reconfigurability exhibited by ODSs;
– supports formal system specifications that are amen-
able to rigorous reasoning;
– have strong and efficient tool support.
In this context, based on the evaluation of several
existing methods and CASE tools, we propose a multi-
formalism approach where we integrate existing technol-
ogies. More specifically, we propose a formal development
framework and a supporting tool that is based on the UML
for specification and refinement, and on the Prototype
Verification System (PVS) [7] for semantic foundation and
rigorous reasoning.
0950-5849/$ - see front matter q 2003 Elsevier B.V. All rights reserved.
doi:10.1016/j.infsof.2003.09.012
Information and Software Technology 46 (2004) 281–286
www.elsevier.com/locate/infsof
q An earlier version appeared in the Proceedings of ACM Symposium on
Applied Computing (SAC03), March 9–12, 2003, Melbourne, FL, USA.* Corresponding author. Tel.: þ1-250-721-8697; fax: þ1-250-721-6052.
E-mail address: [email protected] (I. Traore).

The rest of the paper is organized as follows: In Section 2
we give a brief overview of UML and discuss the rational
behind our choice of notations. In Section 3, we briefly
discuss our formalization approach. Then, in Section 4, we
present a case study of a network reconfiguration protocol.
Finally, in Section 5 we make some concluding remarks.
2. Modeling open distributed systems in UML
The choice of the UML notations was dictated by the fact
that it is built on an object-oriented paradigm and provides
several capabilities such as extension mechanisms (e.g.
stereotyping), dynamic and multiple classification, which
are useful for the description of open distributed systems
(ODSs). In addition, UML provides underlying method-
ology for specification and refinement, a graphical notation,
which contributes to communicability and friendliness, and
very importantly, UML is an international standard for
object-oriented modeling techniques.
In spite of the benefits it provides, UML has limitations
in the context of the formal development of ODSs. The
graphical UML constructs are not precise enough to achieve
a complete and formal descriptions of ODSs. For instance,
in Ref. [2] several incompleteness in the static semantic
model of the UML are reported, especially concerning the
definitions of the concepts of aggregation, inheritance,
constraints on inheritance hierarchies and abstract operation
descriptions. In order to fill this gap, there is a need for
extending the UML notations to achieve two main
objectives.
(i) To improve description of additional constraints on
modeling elements, e.g. invariants on classes and
types.
(ii) To provide formal semantics for different constructs
involved.
Currently, the first issue is generally addressed by using
natural language, which results in ambiguities and mis-
interpretations. An approach is to use the Object Constraint
Language (OCL) [8], an assertional language that is used to
specify well-formedness of modeling abstractions provided
by UML. Unfortunately, expressiveness of OCL is rela-
tively limited in the context of dynamic aspects of systems,
and as pointed out in Ref. [2], the semantic of OCL is not
mathematically defined. Hence, in order to achieve the
objectives mentioned earlier, we decided to use the PVS as
underlying semantic foundation for our development
framework.
3. Formalization of graphical OO models
Several works have attempted to provide a mathematical
basis for the concepts underlying object-oriented graphical
models using different approaches [2]. Some of the
approaches consist of adapting or extending a novel or
existing formal description technique with object-oriented
concepts. Others derive a formal specification from the
semi-formal (or informal) model built with existing object-
oriented notations such as UML. The main problem with
these approaches is the fact that users should have to deal
with a certain amount of formal artifacts, and as we have
already argued, this can be a barrier to their practical
usability in the industrial settings.
A more workable approach that is adopted in our
development framework integrates semi-formal modeling
techniques with formal methods by assigning formal
semantics to the graphical modeling constructs of an
existing notation. In this case, the formal ‘stuff’ is hidden
behind the graphical notations, and users deal with graphical
model they develop, while the formal stuff is automatically
processed at the back-end.
UML consists of nine standard diagrams; our formaliza-
tion work has focused so far only on three of them, namely
class, sequence, and statechart diagrams. In Section 3.1, we
present a brief sketch of a formal semantic definition we
proposed for the UML statechart.
3.1. Formal semantics of UML statecharts
The formalization scheme we adopted for the UML
statecharts consists of definition of formal semantics as a
transition system consisting of the triple (init, V, next),
where init is an initialization predicate that describes initial
global states, V defines the global state in which the machine
may be at a given time, and next is a global transition
relation that describes the execution sequence of the
underlying state machine.
A statechart diagram consists of a collection of state
nodes, also called state vertex. The state nodes are related by
transitions that are triggered by events, and may result in
execution of a series of actions. A transition is characterized
by a source state, a target state, a triggering event, a guard
condition, and an associated action, which is executed when
the transition is fired. Hence, we define the abstract syntax
of a transition as a PVS record type consisting of fields that
capture these elements.
Transition: TYPE þ ¼ [# source: Vertex, trigger: Event,
guard: Condition, effect: Action, target: Vertex #]
The main step in the formalization approach adopted in
our work consists of defining a set of elementary predicates
that describe properties of a system state or a system
operation. We represent the concrete state V as a record type
whose fields correspond to the concrete state variables. We
define three categories of predicates associated, respect-
ively, to the notions of state vertex, guard condition, and
action. The predicate associated to a state corresponds to
a condition that must hold for the state to be activated.
I. Traore et al. / Information and Software Technology 46 (2004) 281–286282

The predicate associated to an action corresponds to a
condition that holds after the execution of the action. This
can be assimilated by postcondition of the action. The state
and the guard conditions are functions of the current values
of the state variables, whereas the postcondition of an action
is a function of both the current and the future values of state
variables.
VC: TYPE ¼ [#current: V, next: V#]
vc: VAR VC; v: VAR V
%Predicates for states, conditions, and actions
pred: [Vertex– . PRED[V]]
pred: [Condition– . PRED[V]]
pred: [Action– . PRED[VC]]
In a statechart diagram, more than one state can be active
at once. If a simple state is active, then all the composite
states that contain it either directly or transitively are also
active. The set of all the states that are active simultaneously
defines what is called a state configuration. We define the
initial state configuration initConf of a statechart as a set of
all the default states involved in the diagram.
Configuration: TYPE þ ¼ finite_set[Vertex]
init: PRED[V] ¼ pred(initConf)
A transition is enabled if the event generated matches its
trigger, its guard condition is true and its source state is
active. An enabled transition may be eligible for firing.
Firing a transition will activate its target state and leads to an
execution of its action. Below we define the predicates
enabled and fired to describe, respectively, the enabling and
firing conditions of a transition. More than one transition
may be enabled within a state machine, resulting in a
conflict. The set of transitions that will actually be fired in
the whole state machine is a maximal set of enabled
transitions with the highest priorities, and that are not
mutually conflicting.
e: VAR Event; tr, tr1, tr2: VAR Transition
a: VAR set[Transition]; v1, v2: VAR V
enabled (e,tr,v): bool ¼ pred(source(tr))(v) AND
(trigger(tr) ¼ e) AND pred(guard(tr))(v)
fired (tr,v,v1): bool ¼ pred(target(tr))(v1) AND pred(ef-
fect(tr))(vc) WHERE vc ¼ (# current: ¼ v, next: ¼ v1#)
maxEnabled(a,v,e): bool ¼
subset?(a, transitions (sm)) AND
FORALL (tr: (a)): enabled(e,tr,v) AND
(FORALL (tr1: (a)): NOT conflict(tr,tr1)) AND
(FORALL (tr2lenabled(e,tr2,v) AND
NOT member(tr2,a)): hasPriority(tr,tr2) OR
samePriority(tr,tr2))
Semantics of UML statechart is based on the run-to-
completion assumption, meaning that events are dispatched
and processed one at a time. At the beginning of a run-to-
completion step, a statechart is in a stable state configur-
ation, with all the actions completed. At the end of the step,
the same conditions apply as well. Before starting a run-to-
completion step, a maximum set of enabled transitions is
chosen non-deterministically and then fired. We define
below a function called eprocess that describes event
processing operations. Event processing consists of selec-
tion and firing a maximal set of enabled transitions. In the
informal semantics of UML statecharts, there are no
assumptions on the order of event dequeuing; we adopt in
this work a simple priority scheme based on the first comes,
first served principle. We also define the global transition
relation next based on function eprocess.
c1, c2: VAR configuration; st: VAR set[Transition]
eprocess(e,v,v1): bool ¼
EXISTS st: subset?(st, transitions(sm)) AND
maxEnabled(st,v,e) ¼ .
(FORALL (tr: (st)): fired(tr,v,v1))
next(v1, v2): bool ¼ EXISTS (e: (events(sm)), c1, c2):
(pred(c1)(v1) AND pred(c2)(v2))
¼ .eprocess(e,v1,v2))
4. A case study
In this section, we illustrate usability of our approach
through a case study of a network reconfiguration protocol.
4.1. Summary of requirements
The IEEE 1394 tree identify protocol [3] is used by the
1394 high performance serial bus for leader election tasks. It
has an open and scalable architecture that allows addition
and removal of devices and peripherals at any time. After a
bus-reset, i.e. when a node is added to, or removed from the
network, all the nodes in the network have equal status and
they know only nodes to which they are directly connected.
The IEEE 1394 tree identify is based on a leader election
algorithm that allows the election of a leader (root) that will
act as a manager of the bus for subsequent phases of the
IEEE 1394 protocol.
4.2. UML specifications
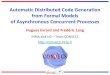
We describe the system by providing UML class and
statechart diagrams shown, respectively, in Figs. 1 and 2.
The class diagram consists of two, classes: Node and
Network classes. The class Node represents individual
nodes involved in the network. A name, possibly a parent
node, and three collections of nodes corresponding,
respectively, to the neighbors, the actual children and the
potential children characterize an instance of Node.
Potential children are represented by the role name
I. Traore et al. / Information and Software Technology 46 (2004) 281–286 283

pending. The class Network corresponds to the collection
of nodes involved in the network. An instance of Node may
be either a regular child or the manager in an instance of
Network. The two associations between the two classes
capture this property.
The statechart diagram shown in Fig. 2 describes the
dynamic behavior of the Network class in terms of the
messages it sends and receives. Initially, a Network object is
in an initial state Init that corresponds to the state entered
immediately after the bus-reset. Then the election starts with
the occurrence of the electLeader event, bringing the
Network object to the Electing state. If a leader is elected,
represented by condition c4, the object will move to the
LeaderElected state ending the statechart. If a cycle is
detected, represented by condition c5, an error is reported,
and the object evolves to the ErrorDetected state. The
Electing state is a concurrent state whose direct substates,
also called regions, describe the individual behavior of the
elements, e.g. the nodes, involved in the collection
underlying a Network object. Dividing it using dashed line
specifies the regions of a concurrent state.
Given i such that 1 # i # N; region NodeiStatus starts in
a Waiting state where the corresponding node waits for ‘be
my parent’ request represented by event beMyParent from
its neighbors. If a request is received from a neighbor that is
not a child (condition c1), an acknowledgement is generated
(action accept), followed by an acknowledgement of the
acceptance (event confirm), and an update of the number of
children of the node (action update). The update may lead to
the Voting state, in case the number of neighbors that are not
children is exactly 1. In that state, the node can send a be my
parent request represented by event vote to the neighbor.
The node may also receive at the same time a be my parent
request from the same node resulting in contention
described by state Contention. After a timeout, the node
returns to the Voting state. If the request is accepted
(condition c2), the node evolves to the ParentElected state,
which represents the final state of the NodeiStatus region.
When all the nodes but one have their parents elected, the
election process is completed, and the node without any
parent becomes the elected leader (condition c4).
4.3. Complementary semantics and system properties
The standard UML document [6] provides only a partial
specification of a system. The UML specification produced
needs to be extended by providing complementary seman-
tics for the elementary features, e.g. state, actions,
conditions, etc. and properties involved using languages
like the OCL [8] or any mathematical or textual languages.
We give some examples of complementary semantics and
properties of the statechart diagram shown in Fig. 2 using
OCL. The context of the expressions is a Network object,
and two interacting Node objects k and n in a collection. Let
us say that node k corresponds to one of the nodes whose
behavior is described by StatuskNode. As example of guard
condition, we define c1 as follows:
c1(n: Node,k: Node): Boolean
self.nodes ! includes(n) AND
self.nodes ! includes(k) AND
k.children ! excludes(n) AND
k.neighbours ! includes(n)
As an example of action, we specify update by the
predicate predUpdate. Its outcome consists of moving the
requesting node from the pending list (i.e. list of the nodes
for which a beMyParent request has been received) to the
children list.
predUpdate(k: Node, n: Node): Boolean
k.children ! includes(n) AND (n.parent ¼ k) AND
k.pending ! excludes(n)
We also give an example of property named Prop1 that
characterizes a Network object. Prop1 ensures that there is
at most one root in the network.
Fig. 1. Class diagram of IEEE 1394 protocol.
Fig. 2. Statechart diagram of IEEE 1394 protocol.
I. Traore et al. / Information and Software Technology 46 (2004) 281–286284

Prop1:
self.nodes !
forAll(p1, p2lp1 ¼ self.root AND p2 ¼ self.root
implies p1 ¼ p2)
4.4. Formal analysis
In order to formally reason about the UML models, we
need a formal description of the system. As we already
stated, we use PVS for that purpose. More specifically, we
translate the OCL specification into PVS, and based on our
semantic framework, we do the same for the UML graphical
specification. The two PVS specification fragments in UML
and OCL are integrated into a single and homogeneous PVS
specification that serves as a basis for the formal verifica-
tion. We have developed a supporting environment, called
the Precise UML Development Environment (PrUDE), to
assist specifiers in generating PVS models. PrUDE also
gives the specifier the possibility to invoke PVS tools either
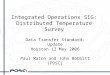
in a batch mode or interactively. Fig. 3 shows a snapshot of
property verification using the PrUPE tool. The lower
windows show the log report generated by running the
PVS tool in batch mode. The verification of the model
is conducted by expressing system properties as PVS
theorems, and then by checking them using the PVS tools.
For instance, property Prop1 (cf. Section 4.3), which states
that there is at most one root in the network, is expressed in
PVS as follows:
p1, p2: VAR VNode
prop1: THEOREM
(member(p1, nodes(v)) AND member(p2, nodes(v))
) (root(v) ¼ p1 AND root(v) ¼ p2 ) p1 ¼ p2))
By invoking the PVS theorem-prover interactively from
PrUDE, we obtain the following proof of property
Prop 1:
prop 1:
l– –
{1} FORALL (p1, p2: VNode, v: V): (member(p1,nodes
(v)) AND member(p2,nodes(v)) ¼ . (root(v)) ¼ p1 AND
root(v) ¼ p2 ¼ .p1 ¼ p2))
Rerunning step: (SKOSIMP*)
Repeatedly Skolemizing and flattening,
this simplifies to:
Fig. 3. Automatic verification of Prop 1 using PrUDE.
I. Traore et al. / Information and Software Technology 46 (2004) 281–286 285

prop 1:
{-1} member(p1!1, nodes(v!1))
{-2} member(p2!1, nodes(v!1))
{-3} root(v!1) ¼ p1!1
{-4} root(v!1) ¼ p2!1
l– –
{1} p1!1 ¼ p2!1
Rerunning step: (EXPAND “member”)
Expanding the definition of member,
this simplifies to:
prop1:
{-1} nodes(v!1)(p1!1)
{-2} nodes(v!1)(p2!1)
[-3] root(v!1) ¼ p1!1
[-4] root(v!1) ¼ p2!1
l– –
[1] p1!1 ¼ p2!1
Rerunning step: (GROUND)
Applying propositional simplification and
decision procedures,
Q.E.D.
Run time ¼ 0.17 s.
Real time ¼ 0.22 s.
NIL
PVS(33):
Conducting interactive proof-checking, even from the
PrUDE environment, is quite often tedious and time
consuming. The properties expressed in our framework
are based on a common template. Using that general
structure, we have succeeded in defining general PVS proof
strategies based on the notion of configuration pairs [5].
Each strategy consists of primitive strategies, and can be
used to check automatically system properties. The follow-
ing is a proof strategy for a statechart:
(defstep property-proof-strategy
(then (auto-rewrite “user_defined_axiom1” “user_de-
fined_axiom2”
…)
(skosimp)
(expand “ConfigurationPair”)
(grind)
)
)
The proof strategy denoted property-proof-strategy,
collects the complementary semantics, e.g. user-defined
axioms as auto-rewrite rules, invokes skosimp command to
replace universal quantifications in the target formulas with
constants. The expand command is then used to expand the
configuration pair definition. Finally, the grind command, a
catch-all strategy is invoked to apply all the necessary
simplifications and complete the proof. These proof
strategies are implemented in PrUDE and can be invoked
to check automatically any proof obligation based on our
framework. If the proof fails, a counterexample is generated
to trace errors in the original UML model. Fig. 3 presents a
snapshot of automatic verification of property Prop 1: the
property is edited using a property editor (the upper
window) and then checked automatically by invoking the
prover.
5. Concluding remarks
In this paper, we have presented a framework for formal
development of ODSs and an automated platform that
supports the framework. One of the main objectives of our
platform is to minimize the formal artifacts that users of the
platform should have to deal with. This in turn facilities the
industrial usability of the platform. In this respect, we have
decided to use the PVS-SL as underlying semantic
foundation and not as a specification language. As a result,
the user need not have an in-depth knowledge about the PVS
formal notation and proof system. The PVS-SL offers a very
general semantic foundation and a set of powerful tools. It is
highly expressive and offers several mechanisms for formal
analysis. In order to enhance the automation of the formal
verification process, we have defined suitable proof patterns
and strategies for the kinds of properties that can be derived
from our semantic model. These strategies are implemented
in the current version of the PrUDE tool, and allow
automatic processing of proof obligations.
References
[1] O.J. Dahl, O. Owe, Formal Methods and the RMODP, Research Report
No. 261, Department of Informatics, University of Oslo, Norway, 1998.
[2] A. Evans, UML class diagrams-filling the semantic gap, Technical
Report, York University, 1998.
[3] IEEE, IEEE Standard for a High Performance Serial Bus, Standard
1394-1995, August 1995.
[4] ISO-IEC JTC1/SC21/WG7, The Reference Model of Open Distributed
Processing, 1995.
[5] M. Liu Yanguo, Proof Patterns for UML-based Verification, Master
Thesis, ECE Department, University of Victoria, Victoria, Canada,
October 2002.
[6] The OMG, OMG Unified Modeling Language Specification, version
1.3, OMG standard document, June 1999.
[7] S. Owre, N. Shankar, J. Rushby, D.W. Stringer-Calvert, PVS Language
Reference, version 2.3, September 1999.
[8] J.B. Warmer, A.G. Kleppe, The Object Constraint Language:
Precise Modeling with UML, Addison Wesley Longman Inc., Readign,
MA, 1999.
I. Traore et al. / Information and Software Technology 46 (2004) 281–286286