Embed Size (px)
Citation preview

Accepted Manuscript
Title: An Improved Recursive and Adaptive Median Filter forHigh Density Impulse Noise
Author: Saroj K. Meher Brijraj Singhawat
PII: S1434-8411(14)00172-1DOI: http://dx.doi.org/doi:10.1016/j.aeue.2014.06.006Reference: AEUE 51234
To appear in:
Received date: 18-11-2013Revised date: 20-6-2014Accepted date: 21-6-2014
Please cite this article as: Saroj K. Meher, Brijraj Singhawat, An ImprovedRecursive and Adaptive Median Filter for High Density Impulse Noise,AEUE - International Journal of Electronics and Communications (2014),http://dx.doi.org/10.1016/j.aeue.2014.06.006
This is a PDF file of an unedited manuscript that has been accepted for publication.As a service to our customers we are providing this early version of the manuscript.The manuscript will undergo copyediting, typesetting, and review of the resulting proofbefore it is published in its final form. Please note that during the production processerrors may be discovered which could affect the content, and all legal disclaimers thatapply to the journal pertain.

Page 1 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
An Improved Recursive and Adaptive Median Filter
for High Density Impulse Noise
Saroj K. Meher and Brijraj Singhawat
Systems Science and Informatics Unit,Indian Statistical Institute,8th Mile, Mysore Road,
Bangalore-560059, INDIA,Ph:+918028483002-534, e-mail: ([email protected]), ([email protected])
Abstract
An improved recursive and adaptive median filter (RAMF) for the restoration of images
corrupted with high density impulse noise is proposed in the present paper. Adaptive
operation of the filter is justified with the variation in size of working window which is
centered at noisy pixels. Based on the presence of noise-free pixel(s), the size of working
window changes. The noisy pixels are filtered through the replacement of their values using
both noise-free pixels of the current working window and previously processed noisy pixels
of that window. These processed noisy pixels are obtained recursively. The combined
effort thus provides an improved platform for filtering high density impulse noise of images.
Experimental results with several real-time noisy images show that the proposed RAMF
outperforms other state-of-the-art filters quantitatively in terms of peak signal to noise ratio
(PSNR) and image enhancement factor (IEF). The superiority of the filter is also justified
qualitatively through visual interpretation.
Keywords:
Image restoration, impulse noise, noise filtering, adaptive median filter.
1. Introduction
The present generation of technology generates and processes huge amount of informa-
tion, particularly in the form of images. Because of several reasons, e.g., instrumental faults
during acquisition and transmission, these images are contaminated with various types of
noises. The most common type can be broadly categorized by two noise generation models,
namely, Gaussian noise and impulse noise. Gaussian noise is characterized by adding a
value to each image pixel that has a zero-mean Gaussian distribution. In turn, the noise
Preprint submitted to AEU - International Journal of Electronics and Communications June 20, 2014
*Manuscript

Page 2 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
affects all pixels of the image. The most common approach for reducing this noise is to
use the zero-mean distribution property, which can be realized by average of neighbor pixel
values [1]. There are two models of impulse noise generation, namely, fixed valued (also
called salt and pepper) and random valued impulsive noise. Fixed valued noise, i.e., salt
and pepper noise changes the pixel value of an image into 0 or 255, where as random valued
impulse noise changes the intensity value into a random value in the dynamic range, e.g.,
[0,5] and [250,255]. Impulse noise replaces a subset of image pixels with noise values, leaving
the remainder unchanged. The present study focuses mainly in designing filters for fixed
impulse noise values of 0 and 255, and provides a brief description about its performance for
the random impulse noise. The need to remove salt and pepper noise is imperative before
any kind of subsequent image processing tasks, such as edge detection or segmentation,
because occurrence of this noise can severely damage the information or data embedded in
the original image and makes them unusable.
One of the simplest and most popular methods to suppress salt and pepper noise is
to perform filtering operation with a conventional median filter [1, 2] that operates on a
working window, centered at the processing pixel of an image. The basic drawback of this
filter is that it performs the operation on all pixels and does not effectively reduces the noise
with the protection of edges and detail information of image. Several modified versions of
the median filter, e.g., [3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16], have been proposed
using a noisy pixel detector, in order to skip the processing of noise-free pixels and preserve
the necessary image details. The effectiveness of these approaches depends highly on the
performance of the noisy pixel detector [17]. The present study does not put more efforts in
the detection of noisy pixels and aims at designing improved filters which faithfully works
to filter the high density noise of an image even in the presence of a less efficient detector.
In a similar effort, recently, Esakkirajan et. al [13] have proposed a modified decision-
based unsymmetrical trimmed median filtering (MDBUTMF) method to filter both gray-
scale and color images. The filter could preserve certain extent of image details at low
density impulse noise, i.e., below 50%. However, at high density noise, i.e., above 50%, the
performance of MDBUTMF deteriorates. The possible reason is that at high density noise,
most/all pixels of the working window are noisy and the filter substitutes the processing
noisy pixel with the mean of adjacent noisy pixels. In turn, the substituted processing
pixels are is approximated by noisy pixels and lead to noisy values.
2
Page 3 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
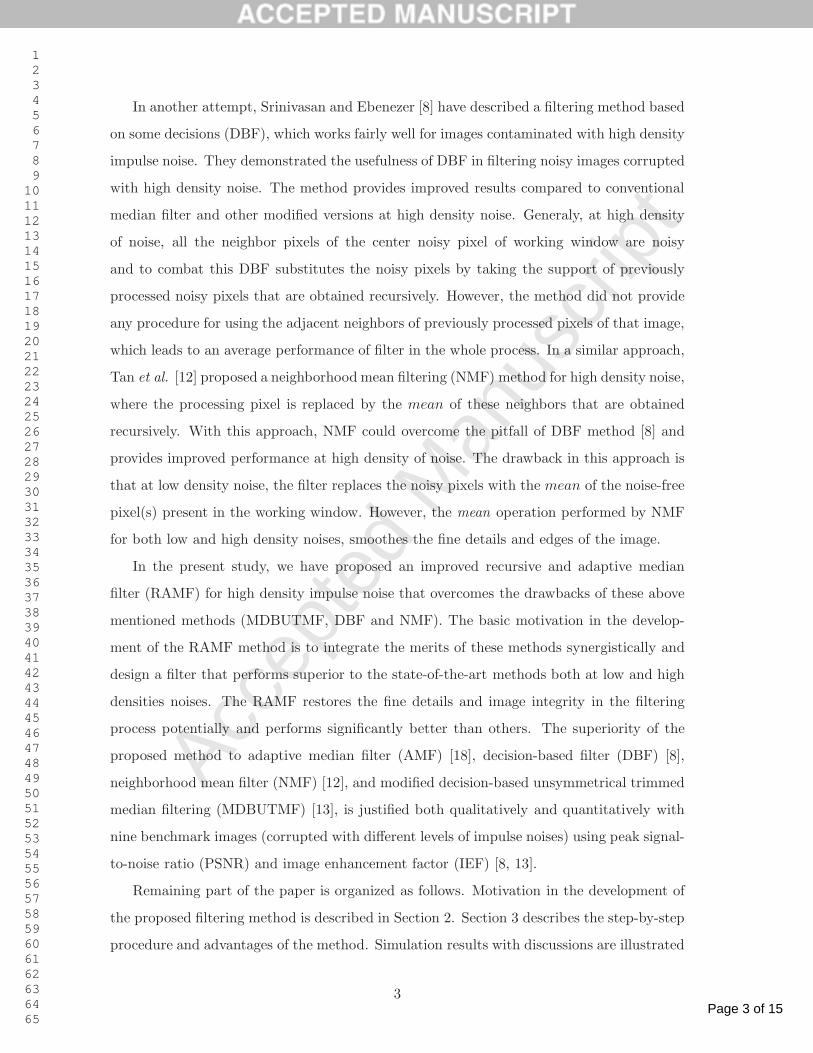
In another attempt, Srinivasan and Ebenezer [8] have described a filtering method based
on some decisions (DBF), which works fairly well for images contaminated with high density
impulse noise. They demonstrated the usefulness of DBF in filtering noisy images corrupted
with high density noise. The method provides improved results compared to conventional
median filter and other modified versions at high density noise. Generaly, at high density
of noise, all the neighbor pixels of the center noisy pixel of working window are noisy
and to combat this DBF substitutes the noisy pixels by taking the support of previously
processed noisy pixels that are obtained recursively. However, the method did not provide
any procedure for using the adjacent neighbors of previously processed pixels of that image,
which leads to an average performance of filter in the whole process. In a similar approach,
Tan et al. [12] proposed a neighborhood mean filtering (NMF) method for high density noise,
where the processing pixel is replaced by the mean of these neighbors that are obtained
recursively. With this approach, NMF could overcome the pitfall of DBF method [8] and
provides improved performance at high density of noise. The drawback in this approach is
that at low density noise, the filter replaces the noisy pixels with the mean of the noise-free
pixel(s) present in the working window. However, the mean operation performed by NMF
for both low and high density noises, smoothes the fine details and edges of the image.
In the present study, we have proposed an improved recursive and adaptive median
filter (RAMF) for high density impulse noise that overcomes the drawbacks of these above
mentioned methods (MDBUTMF, DBF and NMF). The basic motivation in the develop-
ment of the RAMF method is to integrate the merits of these methods synergistically and
design a filter that performs superior to the state-of-the-art methods both at low and high
densities noises. The RAMF restores the fine details and image integrity in the filtering
process potentially and performs significantly better than others. The superiority of the
proposed method to adaptive median filter (AMF) [18], decision-based filter (DBF) [8],
neighborhood mean filter (NMF) [12], and modified decision-based unsymmetrical trimmed
median filtering (MDBUTMF) [13], is justified both qualitatively and quantitatively with
nine benchmark images (corrupted with different levels of impulse noises) using peak signal-
to-noise ratio (PSNR) and image enhancement factor (IEF) [8, 13].
Remaining part of the paper is organized as follows. Motivation in the development of
the proposed filtering method is described in Section 2. Section 3 describes the step-by-step
procedure and advantages of the method. Simulation results with discussions are illustrated
3

Page 4 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
in Section 4. Finally, Section 5 provides the conclusions and future scopes of the present
work.
2. Motivation
The motivation in the development of an improved recursive and adaptive median fil-
ter is based on the merits of three existing methods (DBF, NMF and MDBUTMF), as
described in the previous section. Decision based method, i.e., DBF at high density of
noise substitutes the noisy pixels with adjacent neighbor pixel values that is obtained in
the previous processing step. The disadvantage in this process is that it does not have the
selection and usage procedures for these pixels and thus provides an average performance.
This motivated us to take a consensus decision with proper assessment of these neighbors.
In a similar attempt, NMF method proposed to use the mean of neighbors in replacing the
noisy pixel, when all the pixels of the working window are noisy. The method also uses mean
operation at low density of noise, and thus smoothes the image which leads to the loss of
lines and fine detail (edge) information. MDBUTMF performs the mean operation on the
neighboring pixels of center pixel if all neighbor pixels are noisy. This step of MDBUTMF
tries to approximate the pixel value with the help of noisy pixels that finally produces
nearly noisy value. This encouraged us to use the median operation in the replacement of
the noisy pixels in stead of mean.
These three methods further motivated us to inspect the next size of working window,
i.e., (5 x 5), if all the pixels are noisy in (3 x 3) window. If we find any noise-free pixel(s)
in (5 x 5) window then the processing noisy pixel will be replaced with the median of those
pixels. If all the pixels are noisy, then the processing noisy pixel will be replaced by the
median of already processed four adjacent neighbor pixels in the (3 x 3) window. This step
thus works with an adaptive manner in selecting the working window size. The proposed
filter also rectifies the noisy pixels that nearly approximate the original value of the noisy
pixel. In the following section, we have provided the complete algorithm of the proposed
RAMF method for the convenience of understanding the process.
3. Proposed filtering method
In the present study, we have used the fixed valued impulse noise model called salt
and pepper noise, which consists of two extreme gray-level values of the image with equal
4

Page 5 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
probability. For an 8-bit image, these fixed values are 0 and 255. With this noise, a certain
amount of pixels in the image are either black or white corresponding to value 0 or 255,
respectively. Given the probability z (with 0 6 z 6 1) that a pixel is corrupted, we can
introduce salt and pepper noise in an image by setting a fraction of z = 2 randomly selected
pixels of the image to black with a value 0, and another fraction of z = 2 randomly selected
pixels to white with a value 255. In the proposed impulse noise filtering model (RAMF), the
pixels of the image are separated into noisy and noise-free categories using a simple method
that is computationally efficient [19]. This method works based on the histogram analysis
of image, where the categories of pixels are determined by two noisy peaks of histogram.
These two peaks are the first peaks encountered by passing through the histogram, i.e.,
from left-side end and right-side end toward the center of histogram. Hence, pixel values
between these two peaks are classified as noise-free and others as noisy pixels. The proposed
method is operated on the noisy pixels only leaving the noise-free pixels unchanged. We
have used this simple noisy pixel classification method to avoid the possibility of classifying
some noise-free pixels as noisy and help the next step of filtering operation more efficient.
The complete steps of the algorithm are as follows.
1. Take a pixel x[r, c] from the image and consider a (3 x 3) working window centers at
x[r, c],
2. Classify x[r, c] as noisy or noise-free. If it is noise-free, then its value is left unchanged.
Otherwise, it is processed for filtering in the next step,
3. If x[r, c] is noisy, then two cases arise,
(a) Case 1: If (3 x 3) window contains one or more noise-free pixels (as classified
initially), then replace x[r, c] with the median of these pixel(s),
(b) Case 2: If all pixels in (3 x 3) window are noisy, then increase the size of working
window from (3 x 3) to (5 x 5), then two sub-cases arise,
i. Sub-case 1: If (5 x 5) window contains one or more noise-free pixels, then
replace x[r, c] with the median of these pixel(s),
ii. Sub-case 2: If all pixels of this (5 x 5) window are noisy, then replace x[r, c]
by the median of already processed four adjacent neighboring pixels in the
(3 x 3) window,
4. Repeat steps 1 to 3 until all the pixels in the entire image are processed.
5
Page 6 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
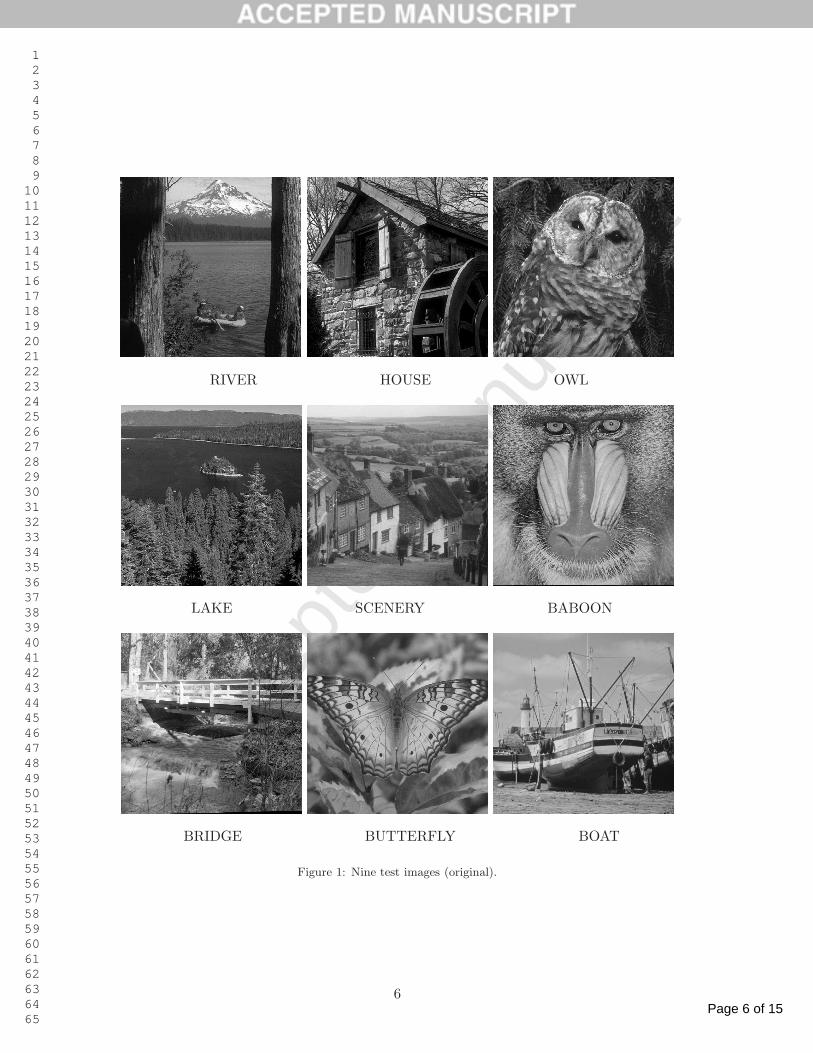
RIVER HOUSE OWL
LAKE SCENERY BABOON
BRIDGE BUTTERFLY BOAT
Figure 1: Nine test images (original).
6

Page 7 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
4. Results and discussions
The present study justifies the superiority of the proposed recursive and adaptive median
filtering (RAMF) method to several state-of-the-art methods and demonstrates its image
restoration capability on different benchmark images contaminated with varying level of
impulse noise densities. Nine benchmark test images (Fig. 1) of sizes (512 x 512) are used
for the simulation purpose. These images are, namely, RIVER, HOUSE, OWL, LAKE,
SCENERY, BABOON, BRIDGE, BUTTERFLY and BOAT. We have provided the detail
results and descriptions of RIVER image only in the result section because similar trend of
performance was observed for all the nine images. However, for 90% noise density, perfor-
mance comparative results of various methods are illustrated for all the images to justify
the superiority of the proposed method over others at high density of noise. The image
restoration operation is performed at different noise densities varied from 10% to 90% with
the increment of 10%. The performance of the proposed RAMF method is compared with
five state-of-the-art filtering methods, such as adaptive median filter (AMF) [18], decision-
based filter (DBF) [8], neighborhood mean filter (NMF) [12], and modified decision-based
unsymmetrical trimmed median filtering (MDBUTMF) [13]. The comparative analysis is
made in terms of objective testing (quantitative evaluation) using peak signal to noise ratio
(PSNR) and image enhancement factor IEF [8, 13], and subjective testing (visual quality).
The indexes PSNR and IEF can be defined as:
PSNR = 10 log10
2552
1
RC
R∑
r=1
C∑
c=1
(x[r, c]− x[r, c])2
, and (1)
IEF =
R∑
r=1
C∑
c=1
(y[r, c]− x[r, c])2
R∑
r=1
C∑
c=1
(x[r, c]− x[r, c])2
. (2)
Here x[r, c], y[r, c] and x[r, c] denote the pixels of original, noisy and restored images at
position [r, c], respectively for an 8-bit image.
All the experimental analyses performed in the present study are providing different
results although the experimental conditions are same. This is because the experiments are
dealing with randowmly generated noise. Hence, each experiment is repeated for ten times
with the same conditions and the average of these values is presented in the result section.
7
Page 8 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
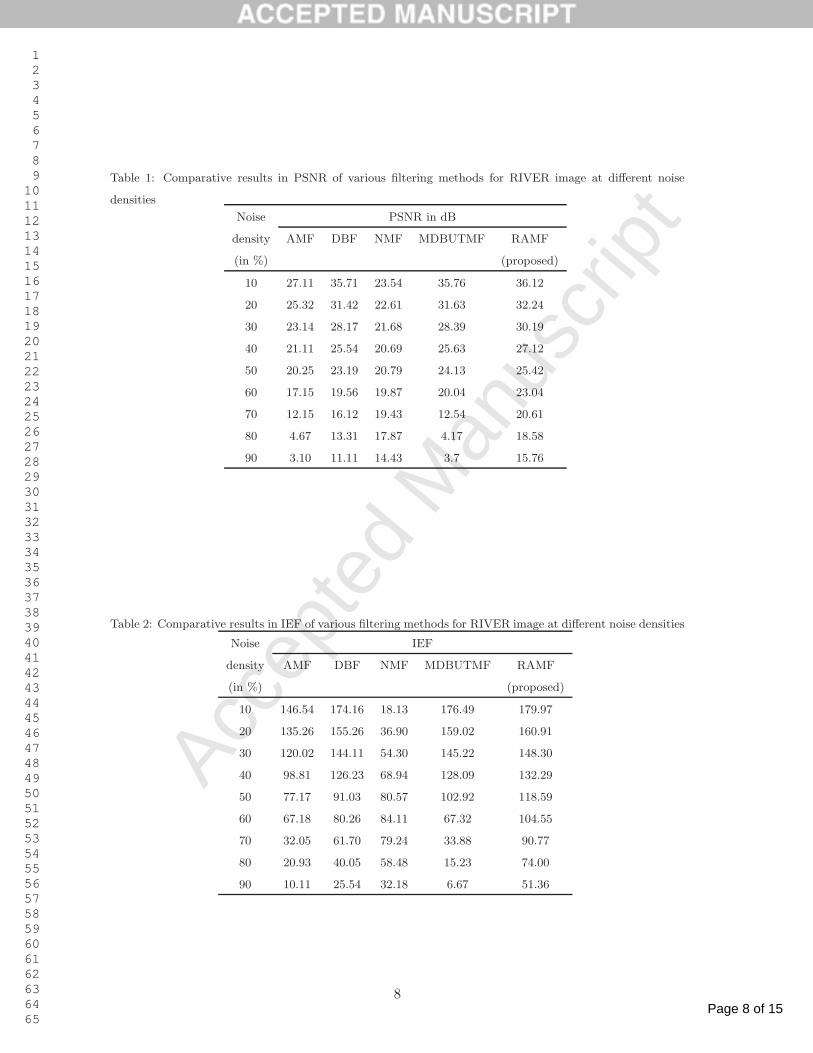
Table 1: Comparative results in PSNR of various filtering methods for RIVER image at different noise
densities
Noise PSNR in dB
density AMF DBF NMF MDBUTMF RAMF
(in %) (proposed)
10 27.11 35.71 23.54 35.76 36.12
20 25.32 31.42 22.61 31.63 32.24
30 23.14 28.17 21.68 28.39 30.19
40 21.11 25.54 20.69 25.63 27.12
50 20.25 23.19 20.79 24.13 25.42
60 17.15 19.56 19.87 20.04 23.04
70 12.15 16.12 19.43 12.54 20.61
80 4.67 13.31 17.87 4.17 18.58
90 3.10 11.11 14.43 3.7 15.76
Table 2: Comparative results in IEF of various filtering methods for RIVER image at different noise densities
Noise IEF
density AMF DBF NMF MDBUTMF RAMF
(in %) (proposed)
10 146.54 174.16 18.13 176.49 179.97
20 135.26 155.26 36.90 159.02 160.91
30 120.02 144.11 54.30 145.22 148.30
40 98.81 126.23 68.94 128.09 132.29
50 77.17 91.03 80.57 102.92 118.59
60 67.18 80.26 84.11 67.32 104.55
70 32.05 61.70 79.24 33.88 90.77
80 20.93 40.05 58.48 15.23 74.00
90 10.11 25.54 32.18 6.67 51.36
8

Page 9 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
Table 3: Comparative results of various filtering methods for nine different images at 90% noise density
AMF DBF NMF MDBUTMF RAMF
(proposed)
Image PSNR IEF PSNR IEF PSNR IEF PSNR IEF PSNR IEF
RIVER 3.10 10.11 11.11 25.54 14.43 32.18 3.7 6.67 15.76 51.36
BABOON 5.01 8.85 7.12 11.27 10.04 13.48 5.72 9.08 14.84 19.82
SCENERY 5.92 8.34 4.01 9.24 13.64 54.78 3.49 9.31 17.48 83.27
BOAT 5.01 9.52 2.97 10.25 10.55 46.79 4.28 9.02 17.28 60.29
BRIDGE 2.76 10.30 3.01 10.47 10.92 27.19 3.22 7.87 15.09 40.79
BUTTERFLY 6.12 11.11 6.75 11.23 12.97 55.50 4.92 10.52 19.72 76.65
HOUSE 5.53 5.18 5.74 5.76 8.89 20.70 2.12 4.86 10.44 31.64
LAKE 8.19 7.91 8.33 7.93 13.27 27.26 2.08 7.16 16.22 38.95
OWL 8.84 8.23 9.01 8.42 15.54 48.68 1.4 7.24 17.01 60.16
For all the five filtering methods, the comparative simulated results in terms of PSNR
values with RIVER image corrupted at different noise densities, are illustrated in Table 1.
It is observed from the Table 1 that at low noise densities (i.e., about below 50%), both
DBF and MDBUTMF provide fair and similar level of performances, which get deteriorated
at high noise densities. The reason behind this is that at low density noise both DBF and
MDBUTMF replace the noisy pixels with the help of noise-free pixels of the working window,
but at high noise density, i.e., when all the pixels of the working window are noisy, althoigh
DBF takes support from the previously processed pixels, it does not follow any procedure to
use them, and MDBUTMF makes use of noisy pixels only. Comparatively, DBF performs
well than MDBUTMF at high density of noise. Interestingly, NMF performs poorer at low
noise densities and comparatively better than MDBUTMF and DBF at high noise densities.
The reason behind this fact is that at high noise densities, NMF makes use of previously
processed pixels of image by taking their mean, when the pixels of the working windows
are noisy. In another comparative analysis, the AMF performed consistently from low to
high noise densities. However, the proposed RAMF method outperformed these methods
at all noise densities that justified the reason for the synergistic integration of the merits
of different methods. The superiority of the proposed RAMF method to others is also
validated with the IEF values in Table 2. All the critically assessed improved performance
obtained with the PSNR is justified and supported the superiority claim of the proposed
improved recursive and adaptive median filtering model with IEF measure. We have also
9

Page 10 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
provided the comparative results with PSNR and IEF values for all the images at high
density noise, i.e., 90% in Table 3. The promising claim with RAMF method is also true
for all the images at high density noise.
(a) (b) (c)
(d) (e) (f)
Figure 2: RIVER image: (a) Noisy (90%), restored images using (b) AMF [18], (c) DBF [8], (d) NMF [12],
(e) MDBUTMF [13], and (f) RAMF (proposed)
So far we have discussed the advantages of RAMF method over others quantitatively.
We have also provided the qualitative results with a visual observation of comparison for
RIVER image at 90% noise density, which reflects the similar observation as obtained with
PSNR and IEF values. The noisy and corresponding restored images are shown in Fig. 2.
The proposed RAMF method improved the filtering efficiency significantly and performed
superior to others in preserving the necessary image details even for highly corrupted images,
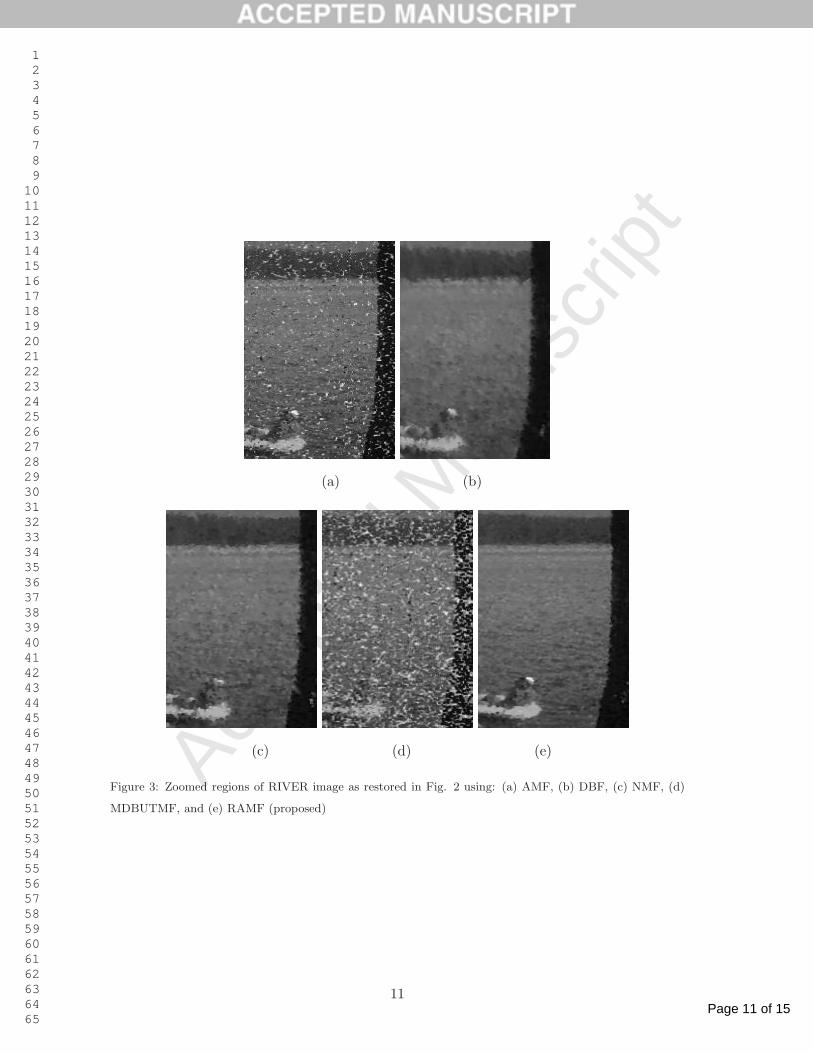
as shown in Fig. 2. A zoomed version of a small region of the restored images using different
filters is shown in Fig. 3 to have an improved visualization. In addition, with four noise
densities (i.e., 10%, 30% , 60% and 90%), the qualitative results are shown in Fig. 4 using
10
Page 11 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
(a) (b)
(c) (d) (e)
Figure 3: Zoomed regions of RIVER image as restored in Fig. 2 using: (a) AMF, (b) DBF, (c) NMF, (d)
MDBUTMF, and (e) RAMF (proposed)
11

Page 12 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
(A) (E) (I)
(B) (F) (J)
(C) (G) (K)
(D) (H) (L)
Figure 4: RIVER image with noise (A) 10%, (B) 30% , (C) 60% and (D) 90%, and their corresponding
restored versions using (E-H) AMF and (I-L) RAMF methods (proposed).12

Page 13 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
two methods of filters, such as AMF and RAMF. Similar trend is also observed in this case.
The regions obtained using the proposed restoration method are more crisp, distinct, and
their edges and fine details are more prominent compared to the regions obtained using other
method. These observations further justify the significance of the PSNR and IEF indexes
in reflecting the performance of the models automatically without visual intervention.
It is worth to mention here that the proposed RAMF filtering method is restoring the im-
ages in an improved way compared to others for random impulse noise values also. However,
its performance deteriorates above the dynamic range of [0,5] and [250,255]. Intuitively, the
efficacy of the method is justified by using the simple and effective searching of noisy peaks
from the histogram of the image, to separate the noisy pixels from noise-free pixels (Section
3). Our future study in this regard is to achieve further improvement and applicability
of the approach to random impulse noise of large dynamic range. Moreover, this would
essentially require a robust detection method for noisy pixels.
5. Conclusions
The present paper proposed an improved recursive and adaptive median filtering (RAMF)
method for fixed-value impulse noise at high density. The performance of RAMF method
was compared with four other methods, such as AMF, DBF, NMF and MDBUTMF in
terms of two measurement indexes, namely PSNR and IEF. It was observed through the
experimental results that the RAMF method could restore the images with better accuracy
than others at high density of noise. Both qualitatively and quantitatively the RAMF was
found to the superior than others in preserving necessary fine lines, edges and image details.
References
[1] R. C. Gonzalez, R. E. Woods, Digital Image Processing, 3rd Edition, Prentice Hall,
New Jersey, USA, 2008.
[2] W. K. Pratt, Median filtering, Tech. rep., Image Proc. Inst. Univ. Southern California,
Los Angeles (1975).
[3] T. Nodes, N. Gallagher, Median filters: Some modifications and their properties, IEEE
Trans. Acoust., Speech, Signal Process. ASSP-30 (1982) 739–746.
13

Page 14 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
[4] S.-J. Ko, S.-J. Lee, Center weighted median filters and their applications to image
enhancement, IEEE Trans. Circuits Syst. 15 (1991) 984–993.
[5] J.-Y. Chang, J.-L. Chen, Classifier-augmented median filters for image restoration,
IEEE Trans. Inst. and Meas. 53 (2004) 351–356.
[6] M. E. Yuksel, A. Bastrk, A simple generalized neuro-fuzzy operator for efficient removal
of impulse noise from highly corrupted digital images, AEU-International Journal of
Electronics and Communications 59 (2005) 1–7.
[7] M. E. Yuksel, A median/ANFIS filter for efficient restoration of digital images cor-
rupted by impulse noise, AEU-International Journal of Electronics and Communica-
tions 60 (2006) 628–637.
[8] K. S. Srinivasan, D. Ebenezer, A new fast and efficient decision-based algorithm for
removal of high-density impulse noises, IEEE Signal Process. Lett. 14 (2007) 189–192.
[9] W. Luo, An efficient algorithm for the removal of impulse noise from corrupted images,
AEU-International Journal of Electronics and Communications 61 (2007) 551–555.
[10] H. Ibrahim, N. S. P. Kong, T. F. Ng, Simple adaptive median filter for the removal
of impulse noise from highly corrupted images, IEEE Trans. Consumer Electronics 54
(2008) 1920–1927.
[11] C.-C. Kang, W.-J. Wang, Modified switching median filter with one more noise detector
for impulse noise removal, AEU-International Journal of Electronics and Communica-
tions 63 (2009) 998–1004.
[12] X. Tan, Q. Zhang, D. Zha, A new salt and pepper noise removal filtering algorithm,
in: Proceedings of 2010 Conference on Dependable Computing (CDC2010), 2010, pp.
129–131.
[13] S. Esakkirajan, T. Veerakumar, A. N. Subramanyam, C. H. PremChand, Removal
of high density salt and pepper noise through modified decision based unsymmetric
trimmed median filter, IEEE Signal Process. Lett. 18 (2011) 287–290.
[14] I. Turkmen, Efficient impulse noise detection method with anfis for accurate image
14

Page 15 of 15
Accep
ted
Man
uscr
ipt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
restoration, AEU-International Journal of Electronics and Communications 65 (2011)
132–139.
[15] B. Xiong, Z. Yin, A universal denoising framework with a new impulse detector and
nonlocal means, IEEE Trans. Image Process. 21 (2012) 1663–1675.
[16] S. K. Meher, Recursive and noise-exclusive fuzzy switching median filter for impulse
noise reduction, Engineering Applications of Artificial Intelligence 30 (2014) 145–154.
[17] S. K. Meher, P. Patel, Fuzzy impulse noise detector for efficient image restoration, in:
IEEE Conf. on Recent Advances in Intelligent Computational Systems (RAICS-2011),
2011, pp. 701–705.
[18] H. Hwang, R. A. Haddad, Adaptive median filters: New algorithms and results, IEEE
Trans. Image Process. 4 (1995) 499–502.
[19] K. K. V. Toh, H. Ibrahim, M. N. Mahyuddin, Salt-and-pepper noise detection and
reduction using fuzzy switching median filter, IEEE Trans. Consumer Electronics 54
(2008) 1956–1961.
15






![TEAM2014-Template - Hrvatska znanstvena bibliografija Web view · 2015-10-26Standard median filter removes impulse noise and preserve image edges [2]. However, median filter has detail](https://img.pdfslide.us/doc/110x75/5aa901fa7f8b9a90188c436d/team2014-template-hrvatska-znanstvena-bibliografija-web-view2015-10-26standard.jpg)


![1 Systematic feedback (recursive) encoders G’(D) = [1,(1 + D 2 )/(1 + D + D 2 ),(1 + D)/(1 + D + D 2 ) ] Infinite impulse response (not polynomial) Easier](https://img.pdfslide.us/doc/110x75/56649e8f5503460f94b93c30/1-systematic-feedback-recursive-encoders-gd-11-d-2-1-d-.jpg)