Embed Size (px)
Citation preview

I J C T A, 9(34) 2016, pp. 119-127© International Science Press
* Department of Electronics and Computer Engineering, KL University, Vijayawada - 520002, Andhra Pradesh, India, E-mails:[email protected],[email protected], [email protected], [email protected]
An Improved CPE Localization Algorithm forNeighbor Node Localization for WirelessSensor NetworksNarra Siva Brahmanandam*, K. Raghava Rao*, K. R. R. Mohanrao* andGRK Prasad*
ABSTRACT
The area is turning out to be progressively the center of examination in the field of remote sensor systems inWireless Sensor Networks (WSNs), since information conveyed from a sensor is just helpful when it is the positionof the sensor. In this work, we have proposed an enhanced area calculation Convex Position Estimation (CPE) thatdiminishes the mistake area without extra equipment and computational expenses. In the proposed plan, initiallywe assess the area of the sensor hubs utilizing arched position gauge (CPE), and after that refine the area of thesensor hubs utilizing the area of the stay hubs two jumps. The recreation comes about demonstrate that the new areacalculation successfully enhances situating precision contrasted and conventional area calculations CPE.
Keywords: wireless sensor networks, localization, convex position estimation
1. INTRODUCTION
Late mechanical advances have empowered the improvement of low - cost, low-control, and multifunctionalsensor hubs. These sensor hubs manufacture the remote sensor systems (WSNs) and see the data which isaccessible from the encompassing environment [1]. WSN can be utilized as a part of different fields, forexample, military undertakings, target following, natural checking, debacle administration, clevertransportation, shrewd home applications, therapeutic consideration, observation, as illustrated in [2]. WNSmeans to give data on spatiotemporal qualities of the watched physical world. Consequently, it is importantto relate detected information with areas, making information geologically significant. Finding the area ofthe sensor hubs where the occasion happened is a characteristic and indispensable part of any WSNapplication in light of the fact that without finding the position of the sensor that is reporting the sensor thatis reporting the detected information, the last won’t be valuable. Furthermore, area data likewise bolsterscentral system layer administrations, for example, topology control, directing, bunching, as per thework performed in [3]. Henceforth, localization, a system for independently finding and building upspatial connections among sensor hubs, is of awesome significance in the advancement of remote sensorsystems.
This paper portrays, the practical answers for the position estimation issue utilizing raised improvement.On the off chance that one hub can speak with another, a vicinity limitation exists between them. As aphysical illustration, if a specific RF framework can transmit 20m and two hubs are in correspondence,their division must be under 20m. These requirements limit the plausible arrangement of obscure hubpositions. Just planar systems are considered, however enlarging the philosophy to 3-D is clear as shown inFigure 1:

120 Narra Siva Brahmanandam, K. Raghava Rao, K. R. R. Mohanrao and GRK Prasad
Given: positions of strong hubs
Locate: a conceivable position for every open hub
Subject to: closeness imperatives forced by known associations
Below shown in Figure 2, the connection oriented communication is convex and without the connectionis non convex in nature.
Figure 1: Graph illustrating data and variables as vertices, constraints as edges
Figure 2: Convex and non convex images
Convex Non Convex
Linear programming (LP) (also called linear optimization) is a method to achieve the best outcome ina mathematical model whose requirements are represented by Linear relationships programming is a specialcase of mathematical programming).
More formally, linear programming is a technique for the optimization of a linear objective functionsubject to linear equality and linear in equality constraints. Its feasible region is a convex proto type, whichis a set defined as the intersection of finitely many half spaces, each of which is defined by a linear inequality.
Linear programs are problems that can be expressed in canonical form as
Maximize CT X
Subject to Ax ��b
And x � 0
A generalization of the LP is the semidefinite program (SDP) of the form:A semidefinite program(SDP) is a problem of minimizing a linear function over an LMI constraint.

An Improved CPE Localization Algorithm for Neighbor Node Localization... 121
In standard inequality form, an SDP is written as
0 1 1min : ( ) : 0,Tm mx
c x F x F x F x F� � � �� �
where F0, . . ., F
m are given symmetric matrix, a � Rn, and x � Rn and is a vector variable.
The above problem generalizes the LP in equality form :
min : , 1, ..., .T Ti ic x a x b i m� �
A way to deal with discover the area of the sensor hubs is to outfit it with an inherent GPS collector [4].In any case, this strategy is absolutely not appropriate for WSNs on the grounds that sensor hubs areplanned to be minimal effort dispensable gadgets, and GPS recipients are costly and power-expendingwhich are lacking for the equipment and force constrained sensors. Different methodologies, alluded to ascommunity oriented confinement calculations, accept that exclusive a little division of sensor have theirposition through manual design or utilizing GSP recipient [5]. These sensor hubs are called grapples, andtheir position can be utilized as references to evaluate the position of different sensors.
Presently, numerous studies have led on the limitation issues in WSNs [8-17]. On the premise of theutilized data, these restriction on calculations, can be separated into two classifications: range-basedcalculations and range free-based calculations [6, 7]. Range-based methodologies are supreme point-to-point separation or introduction between neighbor hubs to gauge the restriction of obscure hubs. Themeasuring advances in the Range-based classification comprises of time contrast of arrive (TDOA) [8],time of landing (TOA) [9], got signal quality marker (RSSI) [10], and point of entry (AOA) [11]. The reachbased limitation calculations yield relative exact, however these calculations need utilize extra equipment,thus making them more costly. Then again, go free based calculations don’t require separation or pointdata. Subsequently, the reach free strategies don’t require any extra expensive equipment, which makes itmore viable and less difficult option over extent based methodologies. In spite of the fact that reach freeplans give less precise results contrasted and go based methodologies, which is because of going blunders,they can at present fulfill numerous applications prerequisites. In light of its cost-adequacy, effortlessness,and agreeableness in applications, sans range approaches have gotten more noteworthy consideration forlimitation in WSNs, as like in, Centroid restriction calculation [12], CPE confinement calculation [13],DV-Hop limitation calculation [14], APIT restriction calculation [16], MDS-MAP restriction calculation[17].
Among a number of reach free limitation calculations, CPE calculation [13] is a slick plan which worthfurther examination. The upsides of the CPE calculations are its effortlessness and the way that it doesn’trely on upon estimation blunder. Be that as it may, one of the disadvantages of the CPE calculation is thatthe exactness of the area estimation is to some degree poor. To address this issue, in this paper, we show anenhanced CPE restriction calculation. The proposed plan can accomplish higher confinement precisionunder the same conditions without utilizing any additional equipment.
Whatever remains of the paper is sorted out as takes after: Section II presents the CPE calculation andits mistake investigation. In sectionIII, the enhanced CPE calculation is portrayed in subtle element. InSection IV, recreation results are appeared and the execution results are contrasted and the CPE calculations.Section V makes an inference based on the proposed work.
2. OVERVIEW OF THE CPE ALGORITHM
The Convex position estimation (CPE) was proposed by proposed by Doherty et. al [13] The essentialthought of the CPE is that if a sensor hub can speak with another sensor, its position is confined by thenetwork requirements to be in some locale in respect to alternate sensors. Numerous such network or

122 Narra Siva Brahmanandam, K. Raghava Rao, K. R. R. Mohanrao and GRK Prasad
closeness requirements characterize the arrangement of plausible sensor position in a WSN. Theserequirements can be spoken to as Linear Matrix Inequalities (LMI-s). When every one of the limitations inthe system are communicated in this shape, the LMI-s can be joined to frame a solitary semi clear program.This is illuminated to deliver a jumping locale for every hub, which Doherty et al. [13]disentangle to be abouncing box. In the event that an obscure hub can speak with some neighboring grapple hubs, then thereare network obliges between the obscure hub and its neighboring stay hubs. Since the area of the obscurehub must inside the covering locale of the correspondence areas of these stay hubs, the data, which includesareas and correspondence scopes of these close-by grapple hubs can be utilized to evaluate the area of theobscure hub.
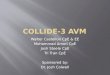
With a specific end goal to decrease the figuring the CPE calculation characterize the estimative rectangle(ER) which limits the covering district and respects the focal point of the rectangle as the estimative area ofthe obscure hub. The four side of the ER are parallel to the x-hub and the y-hub. For instance, in Figure 1,the obscure hub N is with the correspondence range r of three neighboring grapple hubs A1, A2 and A3.That is, there are availability compels between the obscure hub N and its neighboring grapple hubs A1, A2and A3. At that point, by using mixes of this availability obliges, the ER of the covering area where anobscure hub N lives can be computed.
Figure 3: The CPE Algorithm
The CPE calculation is incorporated restriction plan, since every obscure sensor hub sends the gatherednetwork imperatives back to a brought together controller. The unified controller then gauges the area ofeach obscure hub and surge the estimative area back to each obscure hub. This focal strategy makes themovement load in CPE substantial and the CPE calculation scale effectively.
In examination with other restriction calculations, the most appealing component of the CPE is itseffortlessness. Be that as it may, the mean limitation mistake in the CPE calculation is a monotonicallydiminishing capacity of the proportion of stay hubs to all hubs in the WSN. At the point when the proportionof stay hubs is little, the evaluated area is as poor as an arbitrary conjecture of the hub’s directions. In theaccompanying area, we propose a confinement calculation utilizing two-bounce grapple hubs calculationsto decrease the evaluation blunder of the hubs when the rate of stay hubs is little.
3. THE IMPROVED CPE ALGORITHM
In this section, we present the improved CPE localization algorithm in details. There are three main steps inthe improved CEP localization algorithm: Getting the information of the one-hop and two two-hop awayneighboring anchor nodes of unknown nodes, getting the initial estimative location of unknown nodes andrefining the initial location of unknown nodes.

An Improved CPE Localization Algorithm for Neighbor Node Localization... 123
Calculation 1: Getting the data of the one-bounce and two-jump away neighboring stays
1: Each obscure sensor builds two void records List 1 and List 2/* this two records are utilized to keepthe ID, position,
bounce of its one-jump and two jump grapples separately. hop=0. */
2: Each grapple communicates MSG(ID, position, bounce)/* hop=0/
3: A clock begins
4: while the clock is not over do
5: for every MSG got by an obscure hub get.
6: if the ID not in the List 1 or List 2 of the obscure hub then
/* ID is that of in the got MSG*/
7: if hop=0 then/* bounce is that of in the got MSG)
8: Add the grapple to the List 1
9: Broadcast MSG(ID, position, hop=1)
/* ID and position are that of in the got MSG/ )
10: else
11: Add the grapple to the List 2
12: end if
13: end if
14: end while
3.1. Getting the Information of the One-bounce and Two-jump Away Neighboring Anchors ofUnknown Nodes
In the grapple trade stage, each sensor hub assembles the area data of stay hubs, which is one-bounce andtwo-jump away by means of stay hubs two-bounce flooding. By utilizing two-jump flooding, each obscurehub can assemble the ID and the area data of its one-bounce and two-jump neighboring grapple hubs. Theprocedure is appeared in Algorithm 1.
3.2. Getting the Initial Estimative Location of Unknown Nodes
In the wake of completing the grapple trade stage, all the obscure hubs get the ID and the position of theirone-jump and two-bounce away stay hubs. At that point every obscure hub registers its estimative rectangle(ER) as in CPE calculation, and after that uses the focal point of the estimative rectangle as the estimativearea of the obscure hubs. This procedure is the same as that of the CPE limitation calculation, so we don’ttalk about it here.
3.3. Refining the Location of Unknown Nodes
In this stage, the underlying estimative area acquired by using estimative rectangle can be further refined bythe data of neighboring two - jump away stay hubs.
We realize that an obscure that an obscure hub can’t be in the correspondence scope of the it’s two-jump stay hub. From Figure 2 we can obviously see that the range of the obscure hub conceivable in will bediminished by utilizing the data of the two-jump grapple hubs. Figure 2 gives the effect of the two-bounce

124 Narra Siva Brahmanandam, K. Raghava Rao, K. R. R. Mohanrao and GRK Prasad
away stay hubs. At the point when the correspondence scopes of the two-jump away grapple hubs covermore with the obscure hub’s covering locale, the more effect made by the two-bounce away stay hub on theunderlying estimative area of the obscure hub.
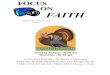
In Figure 3, U is an obscure hub. T1 and T2 are two grapple hubs which are two bounce far from theobscure hub U. U’ is the position of obscure hub U figured by utilizing CPE techniques. The Line L1 is thestraight line which through the stay hub T1 and the underlying estimative area U’. A1B1 is the fragment ofline L1, which is inside the crossing point are between the one-jump away grapple hubs’ covering localeand the correspondence scope of the two-bounce away stay hub T1. What’s more, the Line L2 is the straightline which through the grapple hub T2 and the underlying estimative area U’. A2B2 is the section of lineL2, which is inside the convergence are between the one-bounce away stay hubs’ covering district and thecorrespondence scope of the two-jump away grapple hub T2.
The position the obscure hub N can be ascertained as:
1mip p Ai Bi��� � � (1)
where P’ the underlying estimative area of obscure hub N, which is figured by utilizing CPE technique asa part of the previous subsection.
Ai Bi is a vector, of which the heading of is from two-jump away grapple hub to the underlying estimativearea N’.
m is the quantity of two-jump away stay hubs of the obscure hub N.
Figure 4: Proposed Scheme Algorithm
The Eq. (1) demonstrates that the bigger the correspondence scopes of the two - jump away stay hubscover with the one-bounce away grapple hubs’ covering district the more effect of the two-jump away stayhubs on the position of the obscure hubs.
4. REPRODUCTION RESULT AND ANALYSIS
In this Section, a reproduction is finished by contrasting the enhanced CPE calculation displayed in thispaper with CPE limitation calculation. Recreations are directed on MATLAB. In the reproductions, weutilize the restriction blunder equation to assess the general execution of the calculation. The Equation is asper the following:

An Improved CPE Localization Algorithm for Neighbor Node Localization... 125
2 21 ( ) ( )
( )
Ni M xi X yi Yi
ErrorRX N M
� �� � � ��
�(2)
In this recreation, the confinement blunder is characterized as the normal mistake capacity delineatedas takes after leveling.
Among them, N is the quantity of sensor hubs, M is the quantity of reference point hubs, (Xi, Yi) is thegenuine direction of the obscure hub i is, (xi, yi) is the assessed direction, and R is the correspondencescope of sensor hubs. The restriction mistake mirrors the exactness of limitation calculation. The less thelimitation blunder is, the more exact the restriction execution.
To accomplish a superior measurements result, the reenactments of calculations are haphazardly run200 times for every outcome. Important recreation parameters are sketched out underneath. The systemlocale is thought to be a two dimensional region of 200m×200m. The sensor hubs are circulated haphazardlyin this district. Each sensor hub has the same correspondence range 20m.
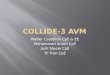
With the quantity of sensor hubs is 200 and 300, additionally under the condition that the stay hubs’extent is changed bit by bit, the mistake statics of the exemplary CPE restriction calculation and the enhancedCPE limitation calculation put forward in the proposed work as shown in Figure 3 and Figure 4 respectively.Recreation result demonstrate that the enhanced CPE restriction calculation beat the CPE confinementcalculation fundamentally in estimation precision with various stay hubs extent connected. At the pointwhen the rate of grapple hubs is little, the normal limitation blunder diminishes as the rate of stay hubsincrements. This is stay hubs can diminish the measure of the obscure hub’s ER and along these linesdiminishes the normal limitation mistake. Our plan performs superior to the CPE plan since we utilize thetwo-jump grapple hubs data to diminish the zone of the likelihood leaving territory of the obscure andhence increment the exactness of our plan. At the point when the quantity of stay hubs turns out to be vast,the extent of ER can’t be significantly decreased. In addition, the impact of two-jump grapple hubsadditionally get to be littler and the subsequently the normal restriction to the two plans turn out to be neareach other.
5. SIMULATION RESULTS
Figure 5: Anchor Nodes Proportion versus Average Localization Error

126 Narra Siva Brahmanandam, K. Raghava Rao, K. R. R. Mohanrao and GRK Prasad
6. CONCLUSION
CPE restriction calculation is an average and ordinarily utilized reach - free confinement calculation, whichhas a downside of low limitation exactness. In this paper, we propose a novel circulated limitation calculationutilizing two - jump stay hubs. In the proposed calculation, we not just utilize neighboring grapples hub’sarea to evaluate the obscure hubs’ position, additionally we utilize the two-bounce stay hubs area to decreasethe blunder of the obscure hubs’ position. It has been demonstrated by means of the reproduction comesabout that the enhanced CPE restriction calculation beats the great CPE limitation calculation, and that thispreferred standpoint does not build the equipment expense of sensor hubs.
REFERENCES
[1] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci, “Wireless Sensor Networks: a Survey”, Computer Networks,vol. 38, no.4, (2002), pp. 393–422.
[2] D. X. Ma, J. Ma and P. M. Xu, et al., “The Application Research Progress of Wireless Sensor Networks”, Applied Mechanicsand Materials, vol. 475, (2014), pp. 520-523.
[3] G. Han, H. Xu, T. Q. Duong et al., “Localization Algorithms of Wireless Sensor Networks: a Survey”, TelecommunicationSystems, vol.52, no.4, (2013), pp. 2419-2436.
[4] V. Vukadinovic and S. Mangold, “Performance of Collaborative GPS Localization in Pedestrian Ad Hoc Networks”,Proceedings of the 3rd ACM international workshop on Mobile Opportunistic Networks. ACM, (2012) March, pp. 45-52.
[5] H. Wymeersch, J. Lien and M. Z. Win, “Cooperative Localization in Wireless Networks. Proceedings of the IEEE, 97.2,(2009), pp. 427-450.
[6] H. Yi and H. Aiqun, “Survey on Localization Algorithms for Wireless Sensor Networks”, Telecommunications Science,vol. 26, no.7, (2010), pp. 69-75.
[7] L. Gao and Z. M. Li, “A Survey on Localization Algorithms in Wireless Sensor Networks”, Applied Mechanics andMaterials, vol. 530, (2014), pp. 15-18.
[8] L. Girod and D. Estrin, “Robust Range Estimation Using Acoustic and Multimodal Sensing”, Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 3, (2001), pp. 1312-1320.
[9] A. Harter, A. Hopper and P. Steggles, et al., “The anatomy of a Context-aware Application”, Wireless Networks, vol. 8,no. 2, (2002), pp. 187-197.
Figure 6: Anchor Nodes Proportion vs. Average Localization Error (the number of total nodes is 6000)

An Improved CPE Localization Algorithm for Neighbor Node Localization... 127
[10] L. Girod, V. Bychkovskiy and J. Elson, et al, “Locating Tiny Sensors in Time and Space: A Case Study”, Proceedings of2002 IEEE International Conference on Computer Design: VLSI, (2002), pp. 214-219.
[11] D. Niculescu, B. Nath , “Ad Hoc Positioning System (APS) using AOA”, Proceedings of the 22nd Annual Joint Conferenceof the IEEE Computer and Communications Societies, vol.3, (2003), pp. 1734-1743.
[12] N. Bulusu N, J. Heidemann and D. Estrin, “GPS-less Low Cost Outdoor Localization for Very Small Devices”, IEEEPersonal Communications Magazine, vol.7, no. 5, (2000), pp. 28-34
[13] L. Doherty, K. S. J. Pister, and L. E. Gaoui, “Convex Position Estimation in Wireless Sensor Networks”, Proceedings ofthe 20th Annual Joint Conference of the IEEE Computer and Communications Societies, vol.3, (2001) April, pp. 1655-1633.
[14] D. Niculescu D, B.Nath B, “DV Based Positioning in Ad hoc Networks”, Journal of Telecommunication Systems, vol. 22,no. 1, (2003), pp. 267-280.
[15] T. He, C. D. Huang and B. Blum, et. al., “Range-free Localization Schemes for Large Scale Sensor Networks”, Proceedingsof the 9th Annual International conference on Mobile Computing and Networking , (2003), pp. 81-95
[16] Y. Shang, W. Ruml and Y. Zhang, et al., “ Localization from Mere Connectivity”, Proceedings of the 4th ACM Int.Symposium on Mobile Ad Hoc Networking and Computing, Annapolis, (2003), pp. 201-212.
[17] Y. Shang and W. Ruml, “Improved MDS-based Localization. Proceedings of the 23rd Annual Joint Conference of theIEEE Computer and Communications Societies “, vol. 4, (2004), pp. 2640-2651.