Embed Size (px)
DESCRIPTION
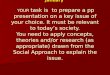
AN EXAMPLE. motor. valve. V R. V L. tank2. tank1. turbine. generator. V R. K. V M. +. K. V M. V R. -. V L. V L. Comparator. v M =K(v R -v L ). M. v M. T M. Motor (armature controlled). Motor data:. Armature winding resistance: R a. Armature winding inductance: L a. - PowerPoint PPT Presentation
Citation preview

Introduction to Feedback Systems / © 1999 Önder YÜKSEL
AN EXAMPLEAN EXAMPLE

04/19/23 1.7 An example 2
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
VR
motor
VL
generator
tank1 tank2turbine
valve

04/19/23 1.7 An example 3
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Comparator
VR
VL
K
VM
vM=K(vR-vL)
K+
-
VR
VL
VM

04/19/23 1.7 An example 4
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
vM
Motor(armature controlled)
Motor data:
Armature winding resistance: Ra
Armature winding inductance: La
Motor constant: KM
Back e.m.f. constant: Kb
TMTM
MM
Rotor inertia: JM
Shaft friction: BM

04/19/23 1.7 An example 5
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Armature controlled D.C. motor - revisited
amiKT
ωKe bb
i f=cnt.
+
eb
-
ia
T
La Ra
Jm Bm

04/19/23 1.7 An example 6
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Model: A block diagram
sJB
1
mm
sLR
(s)e(s)e(s)i
aa
baa
amiKT
TT
ωBm
ωJm
s)ωJ(BT(s) mm
ωKe bb
++
--
ea
eb
sLR
1
aa
ia TTKm
Kb

04/19/23 1.7 An example 7
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
For the problem at hand
eb
T
vM
TM
M
BUT
Mechanical load on the shaft should be the total load
Including that due to the valve also

04/19/23 1.7 An example 8
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Block diagram for the motor
sJB
1*
m*
m
M
Where BM* & JM
* show the total including the load
VM +
-eb
sLR
1
aa
ia TMKm
Kb

04/19/23 1.7 An example 9
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Valve
TMTM
MM
q0q0
Data
q0=KvM
Shaft friction: Bv
Shaft inertia negligible

04/19/23 1.7 An example 10
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Valve model
s1
M
Kv
M q0
and
BM*=BM+Bv , JM
*=JM
q0=KvM sM=M

04/19/23 1.7 An example 11
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Double tank:Definitions
h1
A1A1 A2
A2
h2
q0q0
q1q1 q2
q2
p1 p2
R1R1 R2
R2
p3
p1=h1
p2=h2

04/19/23 1.7 An example 12
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Analysis
h1
q0
q1
p1
Rate of change of heightXcross sectional area
=added volume per unit time
1011 qqhA
1A1
s1+
-
q0
q1
h1

04/19/23 1.7 An example 13
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
q1
p1 p2R1
1
21
1
211 R
hhR
ppq
1R1+
-
h1
h2
q1

04/19/23 1.7 An example 14
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
h2
q1q1 q2
q2
p2
2122 qqhA
2A1
s1++
--
q1q1
q2q2
h2h2

04/19/23 1.7 An example 15
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
2
32
2
322 R
ph
R
ppq
2R1++
--
h2h2
p3p3
q2q2
q2q2
p2 p3R2
R2

04/19/23 1.7 An example 16
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Block diagram for the double tank system
1A1
s1+
-
q0
q1
h1-
h2
1R1+ q1
2A1
s1+
-
q2
h2

04/19/23 1.7 An example 17
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Turbine
q2
G
TG
p3
0
Turbine inertia & friction negligible
GG32 Tωpq
Np
ω
T
q
3
G
G
2
A lossless (transformer-like) element

04/19/23 1.7 An example 18
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Generator
G
TG
vL
iF
Field controlled type
Rotor inertia: JG
Bearing friction: BG
Field inductance: LF
Field resistance: RF

04/19/23 1.7 An example 19
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Field controlled D.C. motor
ia=Cnt.if
T
Fix armature current!LfRf
+ef
+ef
Jm Bm
Tm=Kmif

04/19/23 1.7 An example 20
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
Block diagram model
sJB
1
mm ef
ef
(s)esLR
1(s)i f
fff
fmm iK(s)T
T(s)sJB
1(s)ω
mmm
sLR
1
ff
if TTKm

04/19/23 1.7 An example 21
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
ia=Cnt.if
G
TG
Lf Rf
+vL
+vL
JmBm
ILIL
Jm JG
Bm BG

04/19/23 1.7 An example 22
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
iF=KGTG
fFFL )isLRv (
GGG
G TsJB
1ω
Nωph G
22
NqT 2
G
KG iFFF sLR
vLvL
h2
GN
TGBG+sJG
Nq2

04/19/23 1.7 An example 23
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
K+
-
VR
VL
VM
s
1Kv
Mq0
comparator motor valve double tank turbine-generator
+s
1
-
h1 -1R
1+q1
2A1
s1+
- h2
1A1
q2
N BG+sJG KG RF+sLF
N
ωG TGif VL
bKbe
+
-sLR
1
aa mKsJB
1*
m*
m
Mia

04/19/23 1.7 An example 24
Introduction to Feedback Systems / © 1999 Önder YÜKSEL
End of Chapter
General index
Restart section
Next chapter Restart chapter
End show
The Endi