Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27. NO. 6. NOVEMBER 1979 871
equations obtained by using the zeroth- and first-order ( m = 0 and m = 1) EBC equations as additional ones. The side width W of the square cylinder normalized by l/ko is chosen as the abscissa.
In Figs. 2 and 4 the dotted curves coincide with the dashed ones near the first resonance ( [ I , = 0.707 h where h is the wavelength), and the dashed curves coincide with the solid ones near the second resonance ( W = 1.12 X).
v. DISCUSSION We see from Figs. 1-4 that the unstable conditions occur
within a relatively narrow frequency-spectrum width in the case of a dielectric cylinder (which is also true in the case of a conducting cylinder with TM excitation). However, it must also be noted that their ranges are not points but finite width, so that we should not use (2), or (3) and (4) without any care. Of course, there will be no problems when solutions are not sought in the near-regions of resonances, and the unstable fre- quency-spectrum width will be expected to shrink narrower as the precision of numerical calculation becomes higher.
If the EBC equations (9) or (10) are properly used in addi- tion to the surface equations ( 2 ) , or (3) and (4), the acceptable solutions can be obtained even in the parameter ranges near resonances as shown by the dashed and dotted curves in the figures. However, it must be noted that near the second reso- nance ( W = 1.12 X) use of only the zeroth-order ( m = 0) equation is not adequate to eliminate resonant solutions. This can easily be understood if we recognize that the m = 0 equation in (9) or (10) is just the same as that of (7) or ( 8 ) and that in the example treated here the coordinate origin is just on a nodal line of a second resonant TM mode in the con- ducting square hollow cylinder. On the other hand, if the first-order ( m = 1 ) equation is used as well as the zeroth one, the acceptable solutions can be obtained. Since the higher order equations of EBC restrict the condition of field with angular variation (such as exp O‘ma)) of the cylindrical coor- dinate, the situation never occurs such that the added higher order equation does not work at all to remove resonant solu- tions. In this sense the m = 0 equation is the rather special case. (Only this equation has no angular variation.) Further- more, the role of higher order equations decreases as the order m increases, which is a merit of the EBC method (while in the earlier method the role of each interior point equation does not differ from the others so clearly). Therefore, we will be able t o say that only a few lower order equations suffice for our purpose of removing resonant solutions throughout the whole parameter range. Finally, we should remember that if we don’t want to invoke the leastsquares solution to the over- determined equations, we could remove the same number of equations as those of the added EBC equations from among the equations whose observation points are on the surface boundary [ 31.
ACKNOWLEDGMENT The author wishes to thank Prof. N. Kumagai of Osaka Uni-
versity for his continued encouragement.
REFERENCES [ I ] K. K. Mei and J. Van Bladel, “Low-frequency scattering by rectangular
cylinders.” IEEE Trans. Antennas Propagat.. vol. A p - I I . no. I . pp. 52-56, Jan. 1963.
121 -. “Scattering by perfectly-conducting rectangularcylindres.” IEEE Trans. Anfennus Propagar., vol. AP- I I , no. 2, pp. 1 8 5 1 92, Mar. 1963.
R. Mittra and C. A. Klein, “Stability and convergence of moment method solutions,” in Numerical andAsympfotic Techniques in Ekcfro- magnetics. R. Mittra, E d . Berlin, New York: Springer-Verlag. 1975, ch. 5. T. K. Wu and L. L. Tsai. “Numerical analysis of electromagnetic fields in biological tissues,” Proc. IEEE (Letters). vol. 62, no. 8, pp. 1167- 1168. Aug. 1974. K. K. Mei, “Unimoment method of solving antenna and scattering problems,” IEEE Trans. Antennas Propagat.. vol. AP-22, no. 6, pp. 760-766. Nov. 1974. N. Morita. “Surface integral representations for electromagnetic scattering from dielectric cylinders,” IEEE Trans. Antennas Propagat., vol. 26, no. 2, pp. 261-266. Mar. 1978. -. “Another method of extending the boundary condition for the problem of scattering by dielectric cylinders,” IEEE Trans. Anfennus Propagar. (Commun.). vol. AP-27, no. 1. pp. 97-99. Jan. 1979. T. K . Wu and L. L. Tsai. ”Electromagnetic fields induced inside arbitrary cylindersof biological tissue,” IEEE Trans. Microwave Theory Tech.. vol. MlT-25, (Short Papers). pp. 6145, Jan. 1977. -. “Scattering by a r b i t r a r y cross-sectioned layered lossy dielectric cylinders,” IEEE Trans. Antennas Propagar., vol. AP-25. no. 4, pp. 518-524. Jul. 1977. C. Miller, Foundarions of rhe Marhematical Theory of Elecfromagnetic Waves. Berlin, New York: Springer-Verlag, 1%9. V. V. Solcdukhov and E. N . Vasile’v, “Diffraction of a plane electro- magnetic wave by a dielectric cylinder of arbitrary cross section,” Sov. fhy . -Tech. Phys . . vol. 15, no. I , pp. 32-36, July 1970. N. Morita. “Analysis of scattering by a rectangular cylinder by means of integral equation formulation.” Trans. Insf. Elec. Commun. Eng. Japan, vol. 57-B, no. 10. pp. 72-80. Oct. 1974. J . R. Mautz and R. F. Harrington, “If-field, E-field, and combined field
Tech. Rep. TR-77-2, Feb. 1977. solutions for bodies of revolution.” Syracuse Univ.. Syracuse, NY,
-. “Electromagnetic scattering from a homogeneous body of revolu- tion,” Syracuse Univ.. Syracuse.NY.Tech. Rep. TR-77-10. Nov. 1977. K. Yasuura. Tech. Rep.-lnst. Elec. Eng. Japan. EMT-76-31,Oct. 1976. P. C. Waterman, “Matrix formulation of electromagnetic scattering,” Proc. IEEE, vol. 53. no. 8. pp. 805-8 12. Aug. 1965. -. “scattering by dielectric obstacles.” Alfa Freq., vol. 38 (Speciale). pp. 348-352, 1969. J . Van Bladel. Electromagnetic Fields. New York: McGraw-Hill, 1964, p. 373. N. Morita, “Resonant solutions involved in the integral equation approach to scattering from dielectric cylinders,” presented at Int. Symp. on Antennas and Propagat.. B-10-4, Sendai. Aug. 1978.
An Efficient Approach for Computing the Geometrical optics Field Reflected from a Numerically Specified Surface
RAJ MITTRA, FELLOW, IEEE, AND ALI RUSHDI*, STUDENT MEMBER, IEEE
Abstruct-In the conventional geometrical optical analysis of smooth surfaces it is customary to search for a specular point on the surface of the scatterer for each given combination of source and observation points. In many situations only a numerical description of the surface is available rather than an analytical expression which lends itself more readily to a determination of the specular point. The numerically prescribed form for the surface may be locally interpolated each time a specular point is to be calculated. An alternative approach is investigated that circumvents the step of deriving the specular point and obtains the scattered field in a more
Manuscript received December 10, 1978; revised April 13, 1979. This work was supported in part by the Air Force Office of Scientific Research under Grant AFOSR-77-3375, and by the National Aeronau- tics and Space Administration under Grant NASA-NAS-5-2.5062.
The authors are with the Electromagnetics Laboratory, Depart- ment OfElectricalEngineering, University of Illinois, Urbana, IL 61801.
* The order of the authors is arbitrary.
001 8-926X/79/1100-0871$00.75 0 1979 IEEE

872 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6, NOVEMBER 1979
direct manner. Basically, the method begins by computing the reflected rays off the surface at the points where their coordinates, as well as the partial derivatives (or equivalently, the direction of the normal), are numerically specified. Next, a cluster of three adjacent rays are chosen to define a “mean ray” and the divergence-factor associated with this mean ray. Finally, the amplitude, phase, and vector direction of the reflected field at a given observation point are derived by associating this point with the nearest mean ray and determining its position relative to such a ray.
I. INTRODUCTION
The problem of computing the geometrical optics (GO) field reflected from an arbitrary surface arises frequently in the ray optical analysis of scattering from structures such as shaped subreflectors in Cassegrainian systems. The conven- tional approach [ 1 ] -[ 31 t o GO analysis is based on a search procedure for the specular point on the surface of the scatterer. For a pair of specified source and observation points, the spec- ular point on a surface given by z = f(x, y ) must be determined via a numerical search such that the following conditions are satisfied [ 1 1 , [ 21 :
as as - = o , -- - 0 (1.1) ax aY
s = l s l l + l s g l (1.2)
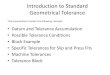
where s1 and s2 are the distances from the source point 0 and the observation point P to the specular point A, respectively1 (see Fig. 1). Although seemingly straightforward, the problem of determining the coordinates of (x, y , z ) of A can involve ex- tensive numerical computation for two reasons. First, for nu- merically specified surfaces the function f ( x , y ) is not ex- plicitly known and must first be constructed via a two-di- mensional interpolation technique using, for example, spline functions. Second, the nonlinear equation (1.1) must be solved via an iteration procedure, e.g., a zero search, which can also be computationally involved and hence time-consuming.
In this communication we present an alternative approach which circumvents both of the above steps; viz., the surface in- terpolation and the specular point search provided that the slope and the location of the points on the reflecting surface are specified-a situation that is common for numerically specified surfaces. We introduce a procedure, referred to here as the “launching method,” which employs the following key steps.
1 ) Launch rays from the point source 0 t o all the pre- scribed grid points of the reflecting surface. Typically, the coordinates as well as the partial derivatives (or equivalently, the direction of the surface normal) are specified at these points.
2) Reflect these incident rays off the surface (Section 11). 3) Define a mean ray associated with each pencil compris-
ing a cluster of three adjacent rays (Section 111). 4) Find the pencil, if any, within which the observation
point P falls (see Fig. 2). If P is not within any of the pencils, then it is in the shadow region (Section IV).
5) Compute the magnitude of the field at P in terms of the divergence factor of the associated pencil (Section V).
6) Use a quadratic phase approximation to obtain the phase of the field at P in terms of its relative location with re-
1 Note that vectors are indicated in the text by boldface letters and in the figures by arrows over the letters.
W A T I O N P O l N i T
SOURCE POINT GIVEN INCIDENT FIELD
Fig. 1. Reflected GO field is required at P, but specular point A is not known.
Fig. 2. Locating P within a pencil comprising a cluster of three adja- cent rays.
spect to the associated mean ray and to its three bouAd- ing rays (Section VI).
7) Obtain the direction of the vector field at P in terms of the location of P within its associated pencil (Section VII).
It will become clear as we develop the material and provide details of the procedure that the launching method does not require either a search for the specular point or an interpola- tion of the reflector surface which can be rather arbitrary. It relies, instead, on the fundamental aspects of the theory of geometrical optics which allows the field at a given observa- tion point to be expressed in terms of those in the immediate neighborhood via a quadratic interpolation formula based on GO. Since the interpolation formula is analytical rather than numerical, the field computation can be carried out very ef- ficiently without sacrificing the accuracy. In support of this statement, time and accuracy comparisons with the conven- tional method are presented in Section VIII.
11. THE REFLECTED FIELD AT A SPECIFIED REFLECTOR POINT
The first step in our procedure is to launch a bundle of rays from the point source 0 to all of the prescribed grid points on the reflecting surface. The surface normals at these points are presumed known and a straightforward application of the principles of GO allows us to compute the field at any obser- vation point in space, as long as this point is located on one of the reflected rays. The problem of computing the reflected field when the observation point is not located on the reflec- ted rays is described in this communication.
Let 0 be the source point and A be an arbitrary point on the reflector. Also let the incident field at A be given by
E’(A) = Z,H’(A) X i

IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6 , NOVEMBER 1979 873
where Z, = @ is the free-space wave impedance, f(b) is the primary pattern of the source, and
s ' = I A - O l , (2.3)
i = (A - O)/s', (2.4)
= unit vector along the incident ray.
Noting that a ray field is a locally plane wave and that the re- flector has a smooth locally flat perfectly conducting surface, then by application of Snell's law and the boundary conditions [4] we get
fi = g - 2( j .$)i (2.5)
Hr(A) = H'(A) - 2(Hi(A) * $6 (2.6)
Er(A) = -Ei(A) + 2(Ei(A) 33 (2.7)
where fi is the unit normal to the surface at point A, a n d 2 is the unit vector along the reflected ray. The indices i , r denote incident and reflected fields, respectively. Since the reflected field is a ray field, the E and H fields at any observation point are related by
Er(A) = ZoHr(A) X 2. (2.8)
111. THE MEAN RAY
The key to deriving the interpolation formula that would allow us to compute the fields at an arbitrary point in space not directly located on any of the reflected rays is to intro- duce the concept of a "mean" ray. We do this in the following manner.
Consider a cluster of three rays corresponding t o a set of three adjacent points D, E, and G on the reflector (see Fig. 3). We construct the reflected rays off the surface, along the di- rection I?,, k z , and k 3 . Without loss of generality, let us as- sume that
Next we introduce a new set of points D l , E l , GI via the definition
D l = D - (I OD I - I 0 E l ) k l (3.2)
E, = E (3.3)
G, = G + (I OEI - I OG 11f i~. (3.4)
Our motivation for introducing these new points is to con- struct a triangle DIEIGl of equiphase vertices in the vicinity of DEG as a preliminary t o defining the mean ray. Let MI be the point of intersection of the medians of the triangle Dl El G I , 1.e.,
The mean ray for the incident pencil is then defined as OM,, and the cluster of three rays corresponding to the points D, E, and G is hereafter associated with this mean ray. An arbitrary point M along the mean ray is given by
M = O + X ( M , - O ) , O < X < 1 . (3.6)
E. E,
Fig. 3 . Illustrating choice of a mean ray.
The reflected mean ray can also be defined in a similar manner by first introducing a set of three points D,, E,, and Gz along the reflected rays
E, = El + L A 2 (3.8)
G2 = G1 + L i 3 (3.9)
where L is an arbitrary distance. M z , the intersection of the medians of the triangle D2E2G2, is given by
M, = Q(D2 + E2 + G,) = M 1 i- $(kl + k 2 +As).
(3.10)
The mean ray associated with the reflected pencil is along M,M2. Any point M located on this mean ray satisfies the equation
M = M l +dm (3.1 1)
where
and p is the distance along theL mean ray measured from M I . It is evident from (3.12) that R , is independent of L , i.e., in- variant to the translation of the triangle D2E2G2.
IV. DEVELOPMENT O F ANALYTICAL INTERPOLATION FORMULAS FOR AN ARBITRARY OBSERVATION
POINT
As a preliminary to the actual computation of the reflected field at an arbitrary observation point, we develop the re- quisite interpolation formulas based on a GO analysis. The first step in this procedure is to associate the specified obser- vation point P (see Fig. 4) with a reflected pencil whose mean ray is nearest to P. The identification of the particular pencil that satisfies this criterion is relatively straightforward as will be evident from the discussion below.

874 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6, NOVEMBER 1979
x , = __ a
F i g . 4. Observation cell. F i g . 4. Observation cell.
If we drop a normal from the point P to one of the mean rays, then the point of intersection of the normal with the ray is given by
Fig. 5. (a) P belongs to shadow region AAiBjP + AB,CjP + ACjAjP - AAjBiC = 2AAjBjPj > 0. (b) P belongs to lit regon AAjBjP +
(4.2) BjCjP + ACjAjP - AAjBiCi = 0.
Mli and k m i are the ith pencil values of MI and k , given by (3.5) and (3.12), respectively.
The nearest mean ray to P, say the jth ray, is the one that satisfies the criterion
We remark here that this procedure for determining the nearest mean ray is extremely rapid on the computer.
Having determined the nearest mean ray to the observation ?oint P, the next step is to introduce a plane Lj, normal to R,j, i.e., the nearest mean ray. Let the plane Lj intersect the bounding rays at Aj, Bj, Cj where
above criterion in an algebraic manner as
P E j t h cell - P E lit region +-+ I AAjBjP
+ ABjCjP + ACjAjP - AAjBjCj I < 6 + 0. (4.10)
If P is in the lit region, the reflected field at P can be ex- pressed in terms of the field at Fj (see Figs. 3 and 4) via the formula
where
(4.6) hj distance between M1j and Fj, k(l OM,, I + hi) phase a t Fj,
HYP) $<PI phase a t P relative to that at Fj,
real unit vector representing the field (4.7) direction at E'.
In the following two sections we show how the magnitude and phase of the reflected field at P can be expressed in terms of the knownvalues at Ai, Bj, and Cj provided thzt P lies within the lit region of the geometrical optics field. Before closing this section we digress for a moment to show that a very simple test can be devised a t this stage for determining whether P lies in the lit or shadow region.
The point P is in the shadow region and hence has an identi- cally zero GO field if it does not fall within the pencil of its nearest mean ray.2 With reference t o Fig. 5, we can state the
V. MAGNITUDE OF THE REFLECTED FIELD AT P The magnitude of the reflected field at P can be expressed
as
where M,j (see (3.5)) is the mean point of the jth reflected pencil at the reflector surface, and DF is the divergence factor of thejth reflected pencil given by
2This assumes equal or nearly equal size cells. where hj is the distance between P and the reflector, measured along the jth mean ray. The expression for hj was given earlier

IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6 , NOVEMBER 1979 875
in (4 .2) and is repeated here for convenience:
(5.3) - hi = R m j . (P - Mlj) . G3
The divergence factor DF of the reflected pencil ray is usually expressed in terms of p1 and p 2 , the principal radii of curvature of the reflected pencil. We can write D F as
D F = [ 1 f- 2K,wAj K ~ ~ h j ~ ] - ~ / ~ (5.4) - DI
where - (5.5) EI
2 P1 Fig. 6 . Pertinent to computation of divergence factor for reflected pencil.
is the mean curvature and
1
P1P2
our assumption that the section of the wavefronts within the reflected pencil can be approximated by planar areas. On the
(5.6) other hand, L should not be chosen too small either, since in this event A Q ~ , 4a2, and 4 a 3 are only slightly different from
is the Gaussian curvature. Since the incident illumination is each other and the evaluation of Klv and KG Presents numeri- from a point source, the incident pencil is doubly divergent. CaldifficUltY.
K G = 7 =
Then, under the assumption that the reflector surface is doubly convex, the reflected pencil will also be doubly divergent. (This can be deduced from the relationship between the curva- ture matrices of the incident and reflected pencils and that of the surface [ 1 I ) . In this communication we limit ourselves to this situation and hence exclude the case of a general surface that might produce ray crossing or caustics. For the present problem both KIM and KG are greater than zero and DF is equal to the square root of the inverse ratio of infinitesimal wavefront areas bounded by the pencil. For numerical pur- poses D F can be approximated by the square root of the in- verse ratio of small triangular areas having equiphase vertices. We construct three triangles [DiEjGi, i = 1, 2 , 31 of-equiphase vertices at distances L apart, (Fig. 6) such that
VI. PHASE OF THE REFLECTED FIELD AT P In this section we discuss the computation of the phase
function @(E'), defined in (4.1 l), which relates the phase of the reflected field at P to that at Fj, the foot of P on the nearest mean ray. Employing the Fresnel approximation [ S I we express @J to within O(xij3) as
where X I , x2 are a3y two orthogonal coordinates at Fj in the
through P, Ai: Bj, and Cj , and (DF)12 = [ 1 + 2KML + K G ~ L ~ ] - ~ ~ ~ = (5.7) Plane transverse toRmj, i.e., the plane Lj of Fig. 4 which passes
- ( 5 . 8 ) is the curvature matrix at Fj. Instead of computing in the
conventional manner [ 51 we can bypass certain steps by evalu- ating @(P) using an alternative approach as follows. We choose the x1 axis in the Lj plane such that it passes through P (Fig. 41, i.e.,
where
Ani = area of triangle DjEiGi, i = 1, 2, 3
(5.9) 21 = (P -
Solving (5.7) and (5.8) for the two unknowns Kllf and KG we get and
K,w = (4402 - 4 Q 3 - 34Q1)/4LAQ1 (5.10) i2 = R m j X il. (6.4)
= ( h 3 - 2&2 + A a 1 ) / 2 L 2 h 1 . (5.1 1) For this choice we have
This completes the determination of DF (see (5.4)) and, hence, the computation of I Hr(P) I (see (5.1)), the magnitude of the @(PI = @(I p - Fj 1, 0) $Q11 I p - Fj 1 2 . (6.5) reflected field. We close this section with a comment on the choice of the L used for the computation of the divergence Note that we need only evaluate a single scalar constant &11 factor. It is evident that L should not be so large as t o violate to compute @(P) using (6.5). We can accomplish this readily

876 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6 , NOVEMBER 1979
and
(6.10)
(6.11)
where
(6.13)
(6.14)
(6.15)
Equations (6.5) and (6.12)-(6.15) can now be used to com- pute the phase @(PI at a given observation point P.
VII. THE VECTOR DIRECTION OF THE REFLECTED FIELD AT P
The last topic remaining in the computation of the field a t P is the determination of the vector direction of the reflected
Fig. 8. Hyperboloid reflector fed at its external focus. c = 12 h, b = 8 A, d = 500 h, e = 1.5, and I OA I - I A01 I = constant = 2 b .
field. Assuming that the point source radiates a linearly polar- ized field, we note that this field, upon reflection from the re- flector, will also be linearly polarized. Hence, the vector di- rection of the field along a given ray will be invariant to dis- placement along that ray. Using this result we can write (see Fig. 7)
k ( A j ) = A(D) = E;ri(D) - 2(E;n'(D) * fiD)A'D (7.1)
k ( B j ) = h ( E ) = &(E) - 2(&(E) * fiE)&E (7.2)
k ( C j ) = h ( G ) = $ ( G ) - 2(I;P'(G) * f i G ) f i G . (7.3)
Let the distances from point P to points Ai, B j , and Cj be d l , d,, and d 3 , respectively. Hence, we can use a weighted average of the vector directions at Aj, B j , and Cj to approximately re- present the vector direction at p. We then have
which completes the derivation of the vector direction of Hr( P) .
VIII. NUMERICAL RESULTS
Based on the analysis presented in the last few sections a computer program has been developed for the CDC Cyber 175 computer system. The program, which calculates the geomet- rical optics field scattered from an arbitrary numerically speci- fied surface, is rather efficient in terms of both storage and computation time. A typical cost for calculating the GO field at 1000 observation points is roughly $2.00, which is a t least one order of magnitude less than that needed by a program based on the conventional specular point method for the same numerically specified surface.
As a test case we have applied our computer program to the problem (see Fig. 8) of computing the H-plane field scattered from a hyperboloid with the feed located at 0, the external focus of the hyperboloid. Only a numerical description of the hyperboloid surface was supplied to the program. The source is assumed t o be a horn radiating a linearly polarized field.
For this test problem the phase and magnitude of the field can be obtained independently using analytical formulas for the surface of the hyperboloid [6]. This allowed us to check the accuracy of the numerical method described in the com- munication and to confirm that the computations are ex- tremely accurate. The error is smallest when the distance be- tween two adjacent grid points is about h/40. Table I provides

IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. AP-27, NO. 6, NOVEMBER 1979 877
TABLE I DEPENCENCE O F ERROR ON CELL SIZE
CELL 510: P W Z EICROR RELATIVE =OR IY P I X J HAGXI7JDE UDUNS
0.001 x
0.009 3 x lo-& 0.1 1
0.0003 3 x 10-3 0.025 a 0.001 5 x 10-5
some numerical results for the error in the magnitude and phase of the reflected field for the test problem.
A small discontinuity in the field was observed as the obser- vation point P wandered from one observation pencil to an adjacent one. The error introduced by this discontinuity was on the order of in field magnitude and 0.003 rad in phase for a distance of AI40 between the grid points. Thus, the discontinuity error determined the upper limit of the total error in the computation.
REFERENCES S. W. Lee. P. Cramer. Jr.. K . Woo. and Y . Rahmat-Samii. "Diffraction by an arbitrary mbretlector: GTD solution." I€€€ Trans. Antennas Propagar., vol. AP-27. no. 3. pp. 305-316. May 1979. W . V . T. Rusch. "Reflector antennas." in Numerical and Asymptoric Techniques in €lecrromagnerics, R. Mittra. Ed. New York: Springer- Verlag. 1975. pp. 217-256. W . V . T. Rusch and 0. SOrenson, "On Determining if.a 3pecular point exists." lE€E Trans. Anrennas Propagar.. vol. AP-27. no. I . pp. 9% I0I .Jan. 1979. F. S. Holt. "Wave fronts. rays. and focal surfaces." in Antenna Theo?," Part 7 . R. E.Collin and F. J . Zucker. Edb. New York: McGraa-Hill. 1969. S. 1%'. Lee. "Differential geometq torGTDapplications." L n n . Illinois at Urbana-Champaign. Electromagnet. Lab. Rep. No. 77-7 I . Oct. 1977. R. Mittra and A. M. Rushdi. "A numerically efticient approach for computing the geometrical optics field reflected from a specified surface." Univ . Illinois at Urbana-Champaign. Electromagnet. Lab. Rep. No. 78-16,Oct. 1978.
A Finite Element Solution of the Wave Propagation Problem for an Inhomogeneous Dielectric Slab
CHUN HSIUNG CHEN AND CHUEN-DER LIEN
Abstract-A numerical technique based on the variational principle and finite element method is developed for studying the wave propagation problem for an arbitrary inhomogeneous dielectric slab. The variational equation for the boundary value problem is formulated and then solved numerically by the fmite element method. The energy criterion for esti- mating the error in the numerical solution is presented. Numerical results for linear, parabolic, and sinusoidal profiles are included.
Manuscript received September 9, 1978; revised May 16, 1979. The authors are with the Department of Electrical Engineering,
National Taiwan University, Taipei, Taiwan, Republic of China.
I. INTRODUCTION
The study of the wave propagatior. problem in a one-dimen- sional inhomogeneous medium is essential to many applied problems. The propagation of an electromagnetic wave through the ionosphere has long been a subject of research [ 11. The study is also helpful in the understanding of the problems: the transmission and reflection properties of the plasma sheath [ 61 , the properties of nonuniform transmission lines: the acoustic wave in a stratified ocean [2 ] , t he propaga- tion in a layered troposphere [ 101, and the one-dimensional potential well (barrier) problem in quantum mechanics.
Several methods have been developed for analyzing the wave propagation problem for one-dimensional inhomoge- neous media, [ 13 - [ 41. Of course, only a few profiles can have closed-form analytic solutions [ 1 ] - [ 5 1 . For other profiles one must consider the approximate methods of Wentzel-Kramer- Brillouin (WKB), phase integral, stepped profile [3 ] , o r t he techniques of mapping [ 6 ] , Hill's functions [7], generalized WKB method [ 81 , and integral equation [ 101 - [ 13 I .
Most of the previous works are based on the differential formulation [1]-[91 or integral formulation [lo]-[ 131. Alternative formulation from the variational principle may be valuable and may give a different picture of the same problem.
Numerical techniques based on the finite difference approx- imations [9] and the integral equation [ 131 have been devel- oped recently for solving the problem with arbitrarily varying profiles. Although the finite difference method has the advan- tage of ease in computation and reduction in computing time, it may not be satisfactory for some cases due to the error asso- ciated with the approximation. The numerical integral equa- tion method is more accurate than the finite difference method, but it has the disadvantage of dealing with the full matrix problem. The purpose of this study is t o develop, from variational aspects, a useful numerical technique which can keep the error small yet not increase the accompanied com- puter storage so it can handle the more general problems, such as the one with a rapidly varying profile, one with large pro- file height, or one with large slab thickness.
One of the difficult problems in the numerical technique is the lack of a criterion for testing the accuracy of the numerical results. Mathematical formulas for error estimates [ 151 may be developed for this problem; however, they are impractical in the actual computation, because they do not take both truncation and roundoff errors into consideration simulta- neously. Another purpose of this study is t o establish a prac- tical criterion for error estimates based on the concept of energy balance.
11. STATEMENT OF THE PROBLEM
Propagation of a linearly polarized plane wave through an inhomogeneous dielectric slab (Fig. 1) will be the main subject of this study. An inhomogeneous dielectric slab ( p o , eOe2(x ) ) occupies the space from x = 0 t o x = a. The spaces x < 0 and x > a are filled with the homogeneous media ( p o , and (Po, E O E Q ) , respectively. Specifically, the homogeneous medium €1 may be the free space, €3 the earth, and the in- homogeneous medium E z ( x ) may be the snow or something else. Alternatively, E ~ ( x ) may represent the ionosphere with €1 and €3 again representing free space. Any one of el, €?(X), and €3 may be lossy and complex, i.e., ~i = eif - j e j f ' , where
0018-926X/79/1100-0877$00.75 O 1979 IEEE

![The Effect of Various Open Cell Aluminium Foam Geometrical ...€¦ · volume heat capacity ratio led to high heat transfer rates. Wu and Wang [23] studied numerically unsteady flow](https://img.pdfslide.us/doc/110x75/5f55a173c5fbfc65ab2a2bc5/the-effect-of-various-open-cell-aluminium-foam-geometrical-volume-heat-capacity.jpg)