Embed Size (px)
Citation preview

Research ArticleAn Earlier Predictive Rollover Index Designed forBus Rollover Detection and Prevention
Shun Tian 1 Lang Wei 1 Chris Schwarz2 WenCai Zhou 1
Yuan Jiao3 and YanQin Chen4
1 School of Automobile Changrsquoan University Xirsquoan 710064 China2National Advanced Driving Simulator University of Iowa Iowa City 52242 USA3School of Construction Machinery Changrsquoan University Xirsquoan 710064 China4Department of Mechanical Engineering Inha University Incheon 2212 Republic of Korea
Correspondence should be addressed to Lang Wei qch 1chdeducn
Received 29 July 2018 Accepted 11 October 2018 Published 1 November 2018
Guest Editor Petru Andrei
Copyright copy 2018 Shun Tian et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
As vehicle rollovers annually cause a great deal of traffic-related deaths an increasing number of vehicles are being equipped withrollover prevention systems with the aim of avoiding such accidents To improve the functionality of active rollover preventionsystems this study provided a potential enhanced method with the intention to predict the tendency of the lateral load transferratio (LTR) which is the most common rollover index This will help provide a certain amount of lead time for the control systemto respond more effectively Before the prediction process an estimation equation was proposed to better estimate the LTR theequation was validated using Simulink and TruckSim Further to eliminate the influence of drawbacks and make this methodpractical a buffer operator was added Simulation results showed that grey LTR (GLTR) was able to roundly predict the future trendof the LTR based on current and previous data Under the tests of ldquoSine with Dwellrdquo (Sindwell) and double lane change (DLC) theGLTR could provide the control system with sufficient time beforehand Additionally to further examine the performance of theGLTR a differential systemmodel was adopted to verify its effectivenessThrough the Sindwell maneuver it was demonstrated thatthe GLTR index could improve the performance of the rollover prevention systems by achieving the expected response
1 Introduction
Among traffic issues bus rollover is a huge problem forbus manufacturing enterprises and traffic administration Tosolve this problem researchers and engineers have developedmany kinds of rollover prevention systems [1] However oncethe phase of the impending rollover begins there is notenough time left for the actuators to act accurately espe-cially during extremely dangerous situations [2] Thereforebeing able to predict the rollover tendency beforehand andto produce a suitable compensation time are essential forpreventing bus rollover situations
Currently the load transfer ratio (LTR) is a widely usedreference parameter for rollover detection [3] having beenused as the rollover index for antirollover bars [4] and differ-ential braking systems [5] Commonly a rollover preventionsystem initiates the actuators once the LTR exceeds a certain
threshold If an algorithm could predict the LTR then thelead time could increase the gap between the predicted LTRand the actual LTR As a result there would be enoughtime for the actuator to initiate an effective countermeasuretherefore increasing its effectiveness
There are many kinds of prediction methods used fordifferent purposes [6 7] Deep learning methods are com-monly used prediction tools which have been used amongmany fields including car risk prediction [8] However LTRprediction is a real-time process only the newly transitoryacquired data can be usedTherefore since LTR prediction isa real-time process a potential prediction algorithm shouldhave the following characteristics a small sample size fastcomputation and small internal storage requirements Onesuitable method is the grey model coined by Deng in the1980s [9]This model is good at solving uncertainty problemswith small samples and poor information Vehicle motion is
HindawiJournal of Advanced TransportationVolume 2018 Article ID 2713868 10 pageshttpsdoiorg10115520182713868
2 Journal of Advanced Transportation
a rapid course therefore old data is not useful for the realprediction and has a side effect on the results because thedata is not new enough Hence we developed a grey-model-based prediction method to conduct LTR prediction to forman early rollover index The grey model has achieved greatsuccess inmany fields and has been used in offline predictionUsing fatal crash data from the United Kingdom Mao et al[10] applied the grey model to future risk estimation andfound that the predicted value approached the actual valueThe grey model was applied to predict the vehiclersquos wheel slipand then the predicted slip was transferred to a sliding modecontroller which strengthened the controllerrsquos robustness[11] The grey model has also been used to predict the lateraldistance between approaching vehicles to provide driverswith extra time to react to an impending collision [12] Interms of real-time LTR simulation Chou et al [13] combineda grey model and a rollover index to detect the rollover of a14-degree-of-freedom tractor-trailer The results showed thatthe grey rollover index achieved an earlier detection of therollover threat than the rollover index alone furthermorethe lead time was sufficient for the actuator to be involvedHowever the vehicle model they used was an ideal Simulinkmodel which is largely different from a real bus and itsLTR estimation did not match well with the TruckSim LTRIn this study a more accurate estimation model was usedand the outputs from TruckSim were directly adopted Inaddition to mitigate the LTRrsquos shock data a buffer operatorwas employed to ensure the effectiveness of the grey LTR(GLTR) throughout a wider speed range Furthermore arollover prevention system model was built to examine thefunction of the GLTR
The main contributions of this paper are the following
(1) A predictive LTR which can be regarded as an earlierrollover detection index was introduced to achieverollover prediction
(2) The GLTR was effective at making predictions dur-ing two standard handling tests ldquoSine with Dwellrdquo(Sindwell) and double lane change (DLC) provingthat GLTR can cope with different kinds of lateralmotions
(3) A considerable lead time was generated to increasethe working time available for initiating a rolloverprevention action
(4) GLTR index was brought into rollover preventionThe effectiveness in reducing the rollover risks wasfurther verified via TruckSimndashSimulink cosimulationby building a differential braking system
The rest of the paper is organized as follows Section 2presents the bus rollover model tier model and its LTRestimation Section 3 introduces the LTR prediction method-ology including the grey model (first-order one variable)known as GM(1 1) as well as the buffer operator Section 4presents the simulation results of the LTR predictionSection 5 offers a further simulation study which fusedthe GLTR with a differential-based braking system FinallySection 6 offers our conclusions
d
af
Fyfl
Fxfla
b
ar
Fyrf
Fxrl
Fyfr
Fxfr
Fyrr
Fxrr
Figure 1 Bus rollover dynamic model
h
2
mg
r
b
b
Figure 2 Bus roll dynamics
2 Bus Dynamic Model
21 LTR Estimation It is not easy to detect the real forceacting on tires since the necessary sensors are extremelyexpensive Therefore a bus rollover dynamic model wasconstructed to establish a suitable LTR estimation equation
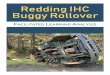
Figure 1 illustrates the lateral dynamics of a bus Thediagram includes the bus yaw angle direction and yaw ratevelocity and slip angle Figure 2 shows the roll dynamics ofthe bus The effect of the busrsquos unsprung mass on the rolldynamics was neglected The road bank angle and the busroll angle and distance associated with the roll center are alsoindicated in this diagram
In Figures 1 and 2 d is the bus width h is the verticaldistance from the sprungmass CG to the assumed roll axis 120574is the yaw rate szlig is the busrsquos slip angle 120575 is the steering wheelangle Fxfl xfr are the front left and the front right longitudinalforces Fyfl yfr are the front left and the front right lateralforces af and ar are the front tirersquos slip angle and rear tirersquosangle and finally 120601119887 and 120601V are the road bank angle and thevehicle roll angle respectively
Journal of Advanced Transportation 3
The bus lateral dynamics can be written as
sum 119865119910 = 119898119860119910= 119865119910119903119897 + 119865119910119903119903 + (119865yfl + 119865yfr) cos 120575
+ (119865xfl + 119865xfr) sin 120575(1)
and
(119868119909119909 + 119898ℎ2) ( 120601119903 minus 120601119887) = (119865119911119871 minus 119865119911119877) 1198892
+ sum 119865119910ℎ cos 120601119903 + 119898119892ℎ sin 120601119903 cos 120601119887minus 119898119892ℎ cos 120601119903 sin 120601119887+ [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin (120601119903 minus 120601119887) cos (120601119903 minus 120601119887)
(2)
where 119860119910 = V + 119903119906 minus 119892 sin 120601119887 + ℎ1206011199032 sin 120601119903 + ℎ1205742 sin 120601119903 minusℎ 120601119903 cos 120601119903 Ay is the lateral acceleration Ixxyyzz are themoments of inertia about the respective axes u is the busrsquoslongitudinal velocity v is busrsquos lateral velocity
The vertical dynamics of the sprung mass can be shownas
119898 = 119898 ( 1206012119903ℎ cos120601119903 + 120601119903ℎ sin 120601119903)= (119865119911119871 + 119865119911119877) minus 119898119892 cos 120601119903
(3)
where m is the sprung mass Ay is the lateral accelerationIf the road bank angle is zero (1)ndash(3) can be expressed as
follows
sum 119865119910 = 119898 (V + 119903119906 + ℎ1205742 sin 120601119903 + ℎ 1206011199032 sin 120601119903 minus ℎ 120601119903 cos 120601119903) (4)
(119868119909119909 + 119898ℎ2) 120601119903 = (119865119911119871 minus 119865119911119877) 1198892 + sum 119865119910ℎ cos 120601119903
+ 119898119892ℎ sin 120601119903 + [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin 120601119903 cos 120601119903(5)
119898 = 119898 ( 1206012119903ℎ cos 120601119903 + 120601119903ℎ sin 120601119903) = (119865119911119871 + 119865119911119877) minus 119898119892 (6)
The LTR which estimates the difference in the tirersquos nor-mal forces acting on each side of the bus is a commonly usedload transfer metric [14] Equation (7) gives the expression ofthe LTR
LTR = 10038161003816100381610038161003816100381610038161003816119865119911119877 minus 119865119911119871119865119911119877 + 119865119911119871
10038161003816100381610038161003816100381610038161003816 (7)
where FzR and FzL represent the vertical force of the right tireand the left tire respectively and 119865119911119877 + 119865119911119871 = 119898119892 The LTRvaries from 0 to 1 where 1 represents one side of bus tireslosing contact with the ground
Solving the simultaneous equations assuming that 120601119903 and120601119903 are zero and substituting them into (7) the following LTRexpression is obtained as shown below
119871119879119877=
100381610038161003816100381610038161003816100381610038161003816100381610038162119889 ℎ (cos 120601119903 (V + 120574119906) + ℎ1205742 sin 120601119903 + 119892 sin 120601119903)
11989210038161003816100381610038161003816100381610038161003816100381610038161003816
(8)
(1)Ramp entering
(2)Obstacle avoidance
Figure 3 Bus rollover conditions
0 05 1 15 2 25 3 35 4Time (s)
Stee
ring
whe
el an
gle
minus100
100
minus50
50
0
Figure 4 Steering wheel angle with 89 kmh Sindwell at 90∘ steeringamplitude
Further assumptions were adopted as follows cos2120601119903 asymp1 ℎ1205742 asymp 0 and V + 120574119906 = 119860119910 sdot cos 120601119903 Therefore the finalexpression of the estimated LTR is
119871119879119877119890 = 100381610038161003816100381610038161003816100381610038162ℎ119889119892 [119860119910 + 119892 sin 120601119903]
10038161003816100381610038161003816100381610038161003816 (9)
The results using (9) were abbreviated as Est-LTRAbuilt-in bus model provided by TruckSim can output each tirersquosvertical force thus the real LTR value can be calculated by (7)with these tire forcesThe calculated result of (7) was referredto as the actual LTR abbreviated as Act-LTR
Some parameters of the bus are listed in Table 1To verify the effectiveness of (9) simulation works were
carried out by comparing the estimated LTR (Est-LTR)and the actual LTR (Act-LTR) models The road adhesioncoefficient was set as 085 ensuring the lateral risk of rolloverbut not of lateral slip Figure 3 shows the common situationsin which the rollover happens easily In order to simulatethese two conditions we used the more complex maneuversof Sindwell and DLC which are often utilized for vehiclesrsquolateral performance tests to reproduce the rollover situations
Figure 4 shows the steering angle of the 89-kmh Sindwelltest where the steering amplitude was 90∘ Results of thecomparison under this test are demonstrated in Figure 5which indicate that the trends of the two curves matchedwell Figure 6 illustrates the steering wheel angle of the DLC
4 Journal of Advanced Transportation
Table 1 Some parameters of the bus in TruckSim
Sprung mass (mkg) 7690Bus width (dm) 193Distance from the sprung mass CG to the assumed roll axis (hVerticalm) 0563
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 5 Estimated versus TruckSim load transfer ratio (LTR) with89 kmh Sindwell at 90∘ steering amplitude
0 1 2 3 4 5 6 7 8 9 10minus100
minus50
0
50
100
150
Time (s)
Stee
ring
whe
el an
gle
Figure 6 Steering wheel angle with 105 kmh double lane change(DLC)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 7 Estimated versus TruckSim LTR with 105 kmh DLC
test which was conducted according to ISO 3888-22002 [15]Figure 7 demonstrates the comparison of the Est-LTR andAct-LTR under a test of a 105-kmh DLC the figure indicatesa slight lead time with the Est-LTR reaching 07 at 3841s and Act-LTR reaching at 3852 s Hence the estimationequation was valid as the reference formulation for a rollover
prevention system As a result in the following sections weconsidered the Est-LTR as the actual LTR
22 TireModel To calculate the tire forces this study utilizedthe Dugoff tire model which is a nonlinear tire model Com-pared with some empirical tire models such as the ldquomagicformulardquo (MF) model which require a large number of tire-specific parameters that are probably unknown the Dugoffmodel by simple equations can acquire the longitudinal andlateral tire-road forces under different wheel slip conditions[16]
Lateral and longitudinal tire-road forces can be defined as
119865119910119894 = 119862119910119894 tan 1205721198941 minus 120582119894 119891 (119878)
119865119909119894 = 1198621199091198941205821198941 minus 120582119894119891 (119878)119878 = 120583119865119911119894
2radic11986221199091198941205822119894 + 1198622119910119894tan2120572119894(1 minus 1205822119894 )
119891 (119878) = 1 S gt 1119878 (2 minus 119878) S lt 1
(10)
Cxi and Cyi are the longitudinal and lateral corner stiffness ofthe tire 120583 is the road adhesion coefficient maximum frictioncoefficient 120582i is the slip ratio and ai is the slip angle of thewheels In this study the value of 120583 is 085 therefore thebus lateral motion risk is the rollover rather than sideslipThe longitudinal wheel slip ratio 120582i can be obtained fromTruckSim
3 LTR Prediction Methodology
31 Grey Model Among the grey model types the one suit-able for LTR prediction is the GM(1 1) type meaning ldquofirst-order one variablerdquo [9]This model is a time series forecastingmodel The differential equations of the GM(1 1) model arerenewed as data becomes available to the prediction
The grey prediction modelrsquos advantage is that just afew discrete data are necessary to characterize an unknownsystem The GM(1 1) steps are as follows [17]
(1) Sort the initial series of 119883(0) as 119883(0) = (119883(0)(1)119883(0)(2) 119883(0)(3) 119883(0)(119899)) 119883(0) is the series of LTR valuesthat can be obtained by the tapped delay block in SimulinkIn this study we set n as equal to 10(2) Generate the first-order accumulated generating anoperation (1-AGO) sequence The general form of 119883(1) is
Journal of Advanced Transportation 5
119883(1)(1) 119883(1)(2) 119883(1)(3) 119883(1)(119899) and the definition of 1-AGO of 119883(0) is
119883(1) (119896) = 119896sum119894=1
119883(0) (119894) = 119883(1) (119896 minus 1) + 119883(0) (119896) (11)
(3) Set the first-order original differential equation of119883(1) Suppose 119883(1) meets the equation below
119889119883(1)119889119905 + 119886119883(1) = 119887 (12)
This is the basic form of GM(1 1) where variable a andvariable b are coefficients Define variable 119886 = [119886 119887]119879
Its difference equation is
119883(0) (119896) + 119886119885(1) (119896) = 119887 119896 = 2 3 119899 (13)
119885(1)(119896) is called the background value and its equationis 1198851(119896) = 1205721198831(119896 minus 1) + (1 minus 120572)1198831(119896)120572 is often set to 05Therefore according to the roots of this differential equationthe particular solution of (10) can be described as
119883(0) (119896) = (119883(0) (1) minus 119887119886 ) 119890minus119886119896 + b
119886 (14)
where 119883(0)(119896) is the predictive value of the series(4) Use the least square to obtain parameters a and bEquation (15) can be written as
119883(0) (119896 + 1) = 119886 [minus 12 (119883 (1) (119896 + 1) + 119883 (1) (119896))] + 119887
119896 ge 119899[119886
119887 ] = (119861119879119861)minus1 119861119879119884119899(15)
where
119861 =[[[[[[[
minus (119883(1) (1) + 119883(1) (2))minus (119883(1) (2) + 119883(1) (3))
minus (119883(1) (119899 minus 1) + 119883(1) (119899))
]]]]]]]
(16)
and
Yn = (119883(0) (2) 119883(0) (3) 119883(0) (119899)) (17)
(5) Estimate the AGO value X1(1) and insert a and b into(8) in order to obtain the particular solution of the differentialequation
As a result the recovery of the predictive value can beacquired by the following equation
119883(0) (119896) = 119883(1) (119896) minus 119896minus1sum119894=1
119883(0) (119894) (18)
32 Buffer Operator During some severe handling tests theLTR value changes rapidly This results in the predictivevalues growing fast and causing unintended local peaks in theprediction curve For this reason it is necessary to mitigatethe growth trend among the time sequence to obtain smoothpredictive curves
X(0) is the delayed LTR data series D is the greybuffer operator applied to X(0) and XD = (X(1)d1X(2)d2 X(n)dn) is the sequence after the function of the operatorD on X D is called the sequence operator and XD is the first-order operator acting sequences 119863 = (1198891 1198892 119889119899)
Basic knowledge about the weakening buffer operatorwhen D meets the three conditions below D can be calleda weakening buffer operator [18] otherwise it cannot be
(a) If X is a monotonic increasing series
B is a weakening buffer operator lArrrArr X(k)leX(k)dk
(b) If X is a monotonic decreasing series
D is a weakening buffer operator lArrrArr X(k)geX(k)dk
(c) If X is a vibrational series
min1le119896le119899
119909 (119896) le min1le119896le119899
119909 (119896) 119889119896and max1le119896le119899
119909 (119896) ge max1le119896le119899
119909 (119896) 119889119896 (19)
D is a weakening buffer operatorIn this study a buffer operator was utilized as below119883(119896)119863 = (119883(119899))120588(119883(119896))(1 minus 120588) 119896 = 1 2 3 119899 D is
a buffer operator and 120588 is the weight of X(n) In this paperthe prediction results could reach a balance between the ideallead time and the smoothness of the prediction curve whenthe value of the weight variable 120588 was 08
33 Real-Time LTR Prediction The simulation works of LTRprediction were implemented in the TruckSim and Simulinkco-atmosphere The TruckSim software can provide a built-in bus model with dynamic outputs that are very close to thefiltered data acquired from a real running bus Figure 8 showsthe LTR prediction process using the grey model which isan open loop The lateral acceleration and roll angles -119860119910and 120601119903 were exported in real time from TruckSim and thenutilized by the LTR equation to obtain an estimated LTRThe tapped delay block was utilized to delay and save theLTR values of a continuous time period and the LTR serieswas sent to the next process At first 10 continuous datawere acquired in real time To avoid the results being infinityor not being a number we set the initial LTR data as 001We used a heuristic method to find that 10 was a suitablenumber If n is over 10 the series contains too much oldinformation which will have a side effect on the predictionresult if n is less than 10 the number is not enough to give areasonable prediction result Before the grey model processthe buffer operator was used on (119883(0)(1) 119883(0)(2) 119883(0)(119899))
6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
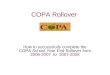
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Advanced Transportation
a rapid course therefore old data is not useful for the realprediction and has a side effect on the results because thedata is not new enough Hence we developed a grey-model-based prediction method to conduct LTR prediction to forman early rollover index The grey model has achieved greatsuccess inmany fields and has been used in offline predictionUsing fatal crash data from the United Kingdom Mao et al[10] applied the grey model to future risk estimation andfound that the predicted value approached the actual valueThe grey model was applied to predict the vehiclersquos wheel slipand then the predicted slip was transferred to a sliding modecontroller which strengthened the controllerrsquos robustness[11] The grey model has also been used to predict the lateraldistance between approaching vehicles to provide driverswith extra time to react to an impending collision [12] Interms of real-time LTR simulation Chou et al [13] combineda grey model and a rollover index to detect the rollover of a14-degree-of-freedom tractor-trailer The results showed thatthe grey rollover index achieved an earlier detection of therollover threat than the rollover index alone furthermorethe lead time was sufficient for the actuator to be involvedHowever the vehicle model they used was an ideal Simulinkmodel which is largely different from a real bus and itsLTR estimation did not match well with the TruckSim LTRIn this study a more accurate estimation model was usedand the outputs from TruckSim were directly adopted Inaddition to mitigate the LTRrsquos shock data a buffer operatorwas employed to ensure the effectiveness of the grey LTR(GLTR) throughout a wider speed range Furthermore arollover prevention system model was built to examine thefunction of the GLTR
The main contributions of this paper are the following
(1) A predictive LTR which can be regarded as an earlierrollover detection index was introduced to achieverollover prediction
(2) The GLTR was effective at making predictions dur-ing two standard handling tests ldquoSine with Dwellrdquo(Sindwell) and double lane change (DLC) provingthat GLTR can cope with different kinds of lateralmotions
(3) A considerable lead time was generated to increasethe working time available for initiating a rolloverprevention action
(4) GLTR index was brought into rollover preventionThe effectiveness in reducing the rollover risks wasfurther verified via TruckSimndashSimulink cosimulationby building a differential braking system
The rest of the paper is organized as follows Section 2presents the bus rollover model tier model and its LTRestimation Section 3 introduces the LTR prediction method-ology including the grey model (first-order one variable)known as GM(1 1) as well as the buffer operator Section 4presents the simulation results of the LTR predictionSection 5 offers a further simulation study which fusedthe GLTR with a differential-based braking system FinallySection 6 offers our conclusions
d
af
Fyfl
Fxfla
b
ar
Fyrf
Fxrl
Fyfr
Fxfr
Fyrr
Fxrr
Figure 1 Bus rollover dynamic model
h
2
mg
r
b
b
Figure 2 Bus roll dynamics
2 Bus Dynamic Model
21 LTR Estimation It is not easy to detect the real forceacting on tires since the necessary sensors are extremelyexpensive Therefore a bus rollover dynamic model wasconstructed to establish a suitable LTR estimation equation
Figure 1 illustrates the lateral dynamics of a bus Thediagram includes the bus yaw angle direction and yaw ratevelocity and slip angle Figure 2 shows the roll dynamics ofthe bus The effect of the busrsquos unsprung mass on the rolldynamics was neglected The road bank angle and the busroll angle and distance associated with the roll center are alsoindicated in this diagram
In Figures 1 and 2 d is the bus width h is the verticaldistance from the sprungmass CG to the assumed roll axis 120574is the yaw rate szlig is the busrsquos slip angle 120575 is the steering wheelangle Fxfl xfr are the front left and the front right longitudinalforces Fyfl yfr are the front left and the front right lateralforces af and ar are the front tirersquos slip angle and rear tirersquosangle and finally 120601119887 and 120601V are the road bank angle and thevehicle roll angle respectively
Journal of Advanced Transportation 3
The bus lateral dynamics can be written as
sum 119865119910 = 119898119860119910= 119865119910119903119897 + 119865119910119903119903 + (119865yfl + 119865yfr) cos 120575
+ (119865xfl + 119865xfr) sin 120575(1)
and
(119868119909119909 + 119898ℎ2) ( 120601119903 minus 120601119887) = (119865119911119871 minus 119865119911119877) 1198892
+ sum 119865119910ℎ cos 120601119903 + 119898119892ℎ sin 120601119903 cos 120601119887minus 119898119892ℎ cos 120601119903 sin 120601119887+ [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin (120601119903 minus 120601119887) cos (120601119903 minus 120601119887)
(2)
where 119860119910 = V + 119903119906 minus 119892 sin 120601119887 + ℎ1206011199032 sin 120601119903 + ℎ1205742 sin 120601119903 minusℎ 120601119903 cos 120601119903 Ay is the lateral acceleration Ixxyyzz are themoments of inertia about the respective axes u is the busrsquoslongitudinal velocity v is busrsquos lateral velocity
The vertical dynamics of the sprung mass can be shownas
119898 = 119898 ( 1206012119903ℎ cos120601119903 + 120601119903ℎ sin 120601119903)= (119865119911119871 + 119865119911119877) minus 119898119892 cos 120601119903
(3)
where m is the sprung mass Ay is the lateral accelerationIf the road bank angle is zero (1)ndash(3) can be expressed as
follows
sum 119865119910 = 119898 (V + 119903119906 + ℎ1205742 sin 120601119903 + ℎ 1206011199032 sin 120601119903 minus ℎ 120601119903 cos 120601119903) (4)
(119868119909119909 + 119898ℎ2) 120601119903 = (119865119911119871 minus 119865119911119877) 1198892 + sum 119865119910ℎ cos 120601119903
+ 119898119892ℎ sin 120601119903 + [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin 120601119903 cos 120601119903(5)
119898 = 119898 ( 1206012119903ℎ cos 120601119903 + 120601119903ℎ sin 120601119903) = (119865119911119871 + 119865119911119877) minus 119898119892 (6)
The LTR which estimates the difference in the tirersquos nor-mal forces acting on each side of the bus is a commonly usedload transfer metric [14] Equation (7) gives the expression ofthe LTR
LTR = 10038161003816100381610038161003816100381610038161003816119865119911119877 minus 119865119911119871119865119911119877 + 119865119911119871
10038161003816100381610038161003816100381610038161003816 (7)
where FzR and FzL represent the vertical force of the right tireand the left tire respectively and 119865119911119877 + 119865119911119871 = 119898119892 The LTRvaries from 0 to 1 where 1 represents one side of bus tireslosing contact with the ground
Solving the simultaneous equations assuming that 120601119903 and120601119903 are zero and substituting them into (7) the following LTRexpression is obtained as shown below
119871119879119877=
100381610038161003816100381610038161003816100381610038161003816100381610038162119889 ℎ (cos 120601119903 (V + 120574119906) + ℎ1205742 sin 120601119903 + 119892 sin 120601119903)
11989210038161003816100381610038161003816100381610038161003816100381610038161003816
(8)
(1)Ramp entering
(2)Obstacle avoidance
Figure 3 Bus rollover conditions
0 05 1 15 2 25 3 35 4Time (s)
Stee
ring
whe
el an
gle
minus100
100
minus50
50
0
Figure 4 Steering wheel angle with 89 kmh Sindwell at 90∘ steeringamplitude
Further assumptions were adopted as follows cos2120601119903 asymp1 ℎ1205742 asymp 0 and V + 120574119906 = 119860119910 sdot cos 120601119903 Therefore the finalexpression of the estimated LTR is
119871119879119877119890 = 100381610038161003816100381610038161003816100381610038162ℎ119889119892 [119860119910 + 119892 sin 120601119903]
10038161003816100381610038161003816100381610038161003816 (9)
The results using (9) were abbreviated as Est-LTRAbuilt-in bus model provided by TruckSim can output each tirersquosvertical force thus the real LTR value can be calculated by (7)with these tire forcesThe calculated result of (7) was referredto as the actual LTR abbreviated as Act-LTR
Some parameters of the bus are listed in Table 1To verify the effectiveness of (9) simulation works were
carried out by comparing the estimated LTR (Est-LTR)and the actual LTR (Act-LTR) models The road adhesioncoefficient was set as 085 ensuring the lateral risk of rolloverbut not of lateral slip Figure 3 shows the common situationsin which the rollover happens easily In order to simulatethese two conditions we used the more complex maneuversof Sindwell and DLC which are often utilized for vehiclesrsquolateral performance tests to reproduce the rollover situations
Figure 4 shows the steering angle of the 89-kmh Sindwelltest where the steering amplitude was 90∘ Results of thecomparison under this test are demonstrated in Figure 5which indicate that the trends of the two curves matchedwell Figure 6 illustrates the steering wheel angle of the DLC
4 Journal of Advanced Transportation
Table 1 Some parameters of the bus in TruckSim
Sprung mass (mkg) 7690Bus width (dm) 193Distance from the sprung mass CG to the assumed roll axis (hVerticalm) 0563
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 5 Estimated versus TruckSim load transfer ratio (LTR) with89 kmh Sindwell at 90∘ steering amplitude
0 1 2 3 4 5 6 7 8 9 10minus100
minus50
0
50
100
150
Time (s)
Stee
ring
whe
el an
gle
Figure 6 Steering wheel angle with 105 kmh double lane change(DLC)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 7 Estimated versus TruckSim LTR with 105 kmh DLC
test which was conducted according to ISO 3888-22002 [15]Figure 7 demonstrates the comparison of the Est-LTR andAct-LTR under a test of a 105-kmh DLC the figure indicatesa slight lead time with the Est-LTR reaching 07 at 3841s and Act-LTR reaching at 3852 s Hence the estimationequation was valid as the reference formulation for a rollover
prevention system As a result in the following sections weconsidered the Est-LTR as the actual LTR
22 TireModel To calculate the tire forces this study utilizedthe Dugoff tire model which is a nonlinear tire model Com-pared with some empirical tire models such as the ldquomagicformulardquo (MF) model which require a large number of tire-specific parameters that are probably unknown the Dugoffmodel by simple equations can acquire the longitudinal andlateral tire-road forces under different wheel slip conditions[16]
Lateral and longitudinal tire-road forces can be defined as
119865119910119894 = 119862119910119894 tan 1205721198941 minus 120582119894 119891 (119878)
119865119909119894 = 1198621199091198941205821198941 minus 120582119894119891 (119878)119878 = 120583119865119911119894
2radic11986221199091198941205822119894 + 1198622119910119894tan2120572119894(1 minus 1205822119894 )
119891 (119878) = 1 S gt 1119878 (2 minus 119878) S lt 1
(10)
Cxi and Cyi are the longitudinal and lateral corner stiffness ofthe tire 120583 is the road adhesion coefficient maximum frictioncoefficient 120582i is the slip ratio and ai is the slip angle of thewheels In this study the value of 120583 is 085 therefore thebus lateral motion risk is the rollover rather than sideslipThe longitudinal wheel slip ratio 120582i can be obtained fromTruckSim
3 LTR Prediction Methodology
31 Grey Model Among the grey model types the one suit-able for LTR prediction is the GM(1 1) type meaning ldquofirst-order one variablerdquo [9]This model is a time series forecastingmodel The differential equations of the GM(1 1) model arerenewed as data becomes available to the prediction
The grey prediction modelrsquos advantage is that just afew discrete data are necessary to characterize an unknownsystem The GM(1 1) steps are as follows [17]
(1) Sort the initial series of 119883(0) as 119883(0) = (119883(0)(1)119883(0)(2) 119883(0)(3) 119883(0)(119899)) 119883(0) is the series of LTR valuesthat can be obtained by the tapped delay block in SimulinkIn this study we set n as equal to 10(2) Generate the first-order accumulated generating anoperation (1-AGO) sequence The general form of 119883(1) is
Journal of Advanced Transportation 5
119883(1)(1) 119883(1)(2) 119883(1)(3) 119883(1)(119899) and the definition of 1-AGO of 119883(0) is
119883(1) (119896) = 119896sum119894=1
119883(0) (119894) = 119883(1) (119896 minus 1) + 119883(0) (119896) (11)
(3) Set the first-order original differential equation of119883(1) Suppose 119883(1) meets the equation below
119889119883(1)119889119905 + 119886119883(1) = 119887 (12)
This is the basic form of GM(1 1) where variable a andvariable b are coefficients Define variable 119886 = [119886 119887]119879
Its difference equation is
119883(0) (119896) + 119886119885(1) (119896) = 119887 119896 = 2 3 119899 (13)
119885(1)(119896) is called the background value and its equationis 1198851(119896) = 1205721198831(119896 minus 1) + (1 minus 120572)1198831(119896)120572 is often set to 05Therefore according to the roots of this differential equationthe particular solution of (10) can be described as
119883(0) (119896) = (119883(0) (1) minus 119887119886 ) 119890minus119886119896 + b
119886 (14)
where 119883(0)(119896) is the predictive value of the series(4) Use the least square to obtain parameters a and bEquation (15) can be written as
119883(0) (119896 + 1) = 119886 [minus 12 (119883 (1) (119896 + 1) + 119883 (1) (119896))] + 119887
119896 ge 119899[119886
119887 ] = (119861119879119861)minus1 119861119879119884119899(15)
where
119861 =[[[[[[[
minus (119883(1) (1) + 119883(1) (2))minus (119883(1) (2) + 119883(1) (3))
minus (119883(1) (119899 minus 1) + 119883(1) (119899))
]]]]]]]
(16)
and
Yn = (119883(0) (2) 119883(0) (3) 119883(0) (119899)) (17)
(5) Estimate the AGO value X1(1) and insert a and b into(8) in order to obtain the particular solution of the differentialequation
As a result the recovery of the predictive value can beacquired by the following equation
119883(0) (119896) = 119883(1) (119896) minus 119896minus1sum119894=1
119883(0) (119894) (18)
32 Buffer Operator During some severe handling tests theLTR value changes rapidly This results in the predictivevalues growing fast and causing unintended local peaks in theprediction curve For this reason it is necessary to mitigatethe growth trend among the time sequence to obtain smoothpredictive curves
X(0) is the delayed LTR data series D is the greybuffer operator applied to X(0) and XD = (X(1)d1X(2)d2 X(n)dn) is the sequence after the function of the operatorD on X D is called the sequence operator and XD is the first-order operator acting sequences 119863 = (1198891 1198892 119889119899)
Basic knowledge about the weakening buffer operatorwhen D meets the three conditions below D can be calleda weakening buffer operator [18] otherwise it cannot be
(a) If X is a monotonic increasing series
B is a weakening buffer operator lArrrArr X(k)leX(k)dk
(b) If X is a monotonic decreasing series
D is a weakening buffer operator lArrrArr X(k)geX(k)dk
(c) If X is a vibrational series
min1le119896le119899
119909 (119896) le min1le119896le119899
119909 (119896) 119889119896and max1le119896le119899
119909 (119896) ge max1le119896le119899
119909 (119896) 119889119896 (19)
D is a weakening buffer operatorIn this study a buffer operator was utilized as below119883(119896)119863 = (119883(119899))120588(119883(119896))(1 minus 120588) 119896 = 1 2 3 119899 D is
a buffer operator and 120588 is the weight of X(n) In this paperthe prediction results could reach a balance between the ideallead time and the smoothness of the prediction curve whenthe value of the weight variable 120588 was 08
33 Real-Time LTR Prediction The simulation works of LTRprediction were implemented in the TruckSim and Simulinkco-atmosphere The TruckSim software can provide a built-in bus model with dynamic outputs that are very close to thefiltered data acquired from a real running bus Figure 8 showsthe LTR prediction process using the grey model which isan open loop The lateral acceleration and roll angles -119860119910and 120601119903 were exported in real time from TruckSim and thenutilized by the LTR equation to obtain an estimated LTRThe tapped delay block was utilized to delay and save theLTR values of a continuous time period and the LTR serieswas sent to the next process At first 10 continuous datawere acquired in real time To avoid the results being infinityor not being a number we set the initial LTR data as 001We used a heuristic method to find that 10 was a suitablenumber If n is over 10 the series contains too much oldinformation which will have a side effect on the predictionresult if n is less than 10 the number is not enough to give areasonable prediction result Before the grey model processthe buffer operator was used on (119883(0)(1) 119883(0)(2) 119883(0)(119899))
6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 3
The bus lateral dynamics can be written as
sum 119865119910 = 119898119860119910= 119865119910119903119897 + 119865119910119903119903 + (119865yfl + 119865yfr) cos 120575
+ (119865xfl + 119865xfr) sin 120575(1)
and
(119868119909119909 + 119898ℎ2) ( 120601119903 minus 120601119887) = (119865119911119871 minus 119865119911119877) 1198892
+ sum 119865119910ℎ cos 120601119903 + 119898119892ℎ sin 120601119903 cos 120601119887minus 119898119892ℎ cos 120601119903 sin 120601119887+ [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin (120601119903 minus 120601119887) cos (120601119903 minus 120601119887)
(2)
where 119860119910 = V + 119903119906 minus 119892 sin 120601119887 + ℎ1206011199032 sin 120601119903 + ℎ1205742 sin 120601119903 minusℎ 120601119903 cos 120601119903 Ay is the lateral acceleration Ixxyyzz are themoments of inertia about the respective axes u is the busrsquoslongitudinal velocity v is busrsquos lateral velocity
The vertical dynamics of the sprung mass can be shownas
119898 = 119898 ( 1206012119903ℎ cos120601119903 + 120601119903ℎ sin 120601119903)= (119865119911119871 + 119865119911119877) minus 119898119892 cos 120601119903
(3)
where m is the sprung mass Ay is the lateral accelerationIf the road bank angle is zero (1)ndash(3) can be expressed as
follows
sum 119865119910 = 119898 (V + 119903119906 + ℎ1205742 sin 120601119903 + ℎ 1206011199032 sin 120601119903 minus ℎ 120601119903 cos 120601119903) (4)
(119868119909119909 + 119898ℎ2) 120601119903 = (119865119911119871 minus 119865119911119877) 1198892 + sum 119865119910ℎ cos 120601119903
+ 119898119892ℎ sin 120601119903 + [(119868119910119910 minus 119868119911119911) minus 119898ℎ2] 1205742 sin 120601119903 cos 120601119903(5)
119898 = 119898 ( 1206012119903ℎ cos 120601119903 + 120601119903ℎ sin 120601119903) = (119865119911119871 + 119865119911119877) minus 119898119892 (6)
The LTR which estimates the difference in the tirersquos nor-mal forces acting on each side of the bus is a commonly usedload transfer metric [14] Equation (7) gives the expression ofthe LTR
LTR = 10038161003816100381610038161003816100381610038161003816119865119911119877 minus 119865119911119871119865119911119877 + 119865119911119871
10038161003816100381610038161003816100381610038161003816 (7)
where FzR and FzL represent the vertical force of the right tireand the left tire respectively and 119865119911119877 + 119865119911119871 = 119898119892 The LTRvaries from 0 to 1 where 1 represents one side of bus tireslosing contact with the ground
Solving the simultaneous equations assuming that 120601119903 and120601119903 are zero and substituting them into (7) the following LTRexpression is obtained as shown below
119871119879119877=
100381610038161003816100381610038161003816100381610038161003816100381610038162119889 ℎ (cos 120601119903 (V + 120574119906) + ℎ1205742 sin 120601119903 + 119892 sin 120601119903)
11989210038161003816100381610038161003816100381610038161003816100381610038161003816
(8)
(1)Ramp entering
(2)Obstacle avoidance
Figure 3 Bus rollover conditions
0 05 1 15 2 25 3 35 4Time (s)
Stee
ring
whe
el an
gle
minus100
100
minus50
50
0
Figure 4 Steering wheel angle with 89 kmh Sindwell at 90∘ steeringamplitude
Further assumptions were adopted as follows cos2120601119903 asymp1 ℎ1205742 asymp 0 and V + 120574119906 = 119860119910 sdot cos 120601119903 Therefore the finalexpression of the estimated LTR is
119871119879119877119890 = 100381610038161003816100381610038161003816100381610038162ℎ119889119892 [119860119910 + 119892 sin 120601119903]
10038161003816100381610038161003816100381610038161003816 (9)
The results using (9) were abbreviated as Est-LTRAbuilt-in bus model provided by TruckSim can output each tirersquosvertical force thus the real LTR value can be calculated by (7)with these tire forcesThe calculated result of (7) was referredto as the actual LTR abbreviated as Act-LTR
Some parameters of the bus are listed in Table 1To verify the effectiveness of (9) simulation works were
carried out by comparing the estimated LTR (Est-LTR)and the actual LTR (Act-LTR) models The road adhesioncoefficient was set as 085 ensuring the lateral risk of rolloverbut not of lateral slip Figure 3 shows the common situationsin which the rollover happens easily In order to simulatethese two conditions we used the more complex maneuversof Sindwell and DLC which are often utilized for vehiclesrsquolateral performance tests to reproduce the rollover situations
Figure 4 shows the steering angle of the 89-kmh Sindwelltest where the steering amplitude was 90∘ Results of thecomparison under this test are demonstrated in Figure 5which indicate that the trends of the two curves matchedwell Figure 6 illustrates the steering wheel angle of the DLC
4 Journal of Advanced Transportation
Table 1 Some parameters of the bus in TruckSim
Sprung mass (mkg) 7690Bus width (dm) 193Distance from the sprung mass CG to the assumed roll axis (hVerticalm) 0563
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 5 Estimated versus TruckSim load transfer ratio (LTR) with89 kmh Sindwell at 90∘ steering amplitude
0 1 2 3 4 5 6 7 8 9 10minus100
minus50
0
50
100
150
Time (s)
Stee
ring
whe
el an
gle
Figure 6 Steering wheel angle with 105 kmh double lane change(DLC)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 7 Estimated versus TruckSim LTR with 105 kmh DLC
test which was conducted according to ISO 3888-22002 [15]Figure 7 demonstrates the comparison of the Est-LTR andAct-LTR under a test of a 105-kmh DLC the figure indicatesa slight lead time with the Est-LTR reaching 07 at 3841s and Act-LTR reaching at 3852 s Hence the estimationequation was valid as the reference formulation for a rollover
prevention system As a result in the following sections weconsidered the Est-LTR as the actual LTR
22 TireModel To calculate the tire forces this study utilizedthe Dugoff tire model which is a nonlinear tire model Com-pared with some empirical tire models such as the ldquomagicformulardquo (MF) model which require a large number of tire-specific parameters that are probably unknown the Dugoffmodel by simple equations can acquire the longitudinal andlateral tire-road forces under different wheel slip conditions[16]
Lateral and longitudinal tire-road forces can be defined as
119865119910119894 = 119862119910119894 tan 1205721198941 minus 120582119894 119891 (119878)
119865119909119894 = 1198621199091198941205821198941 minus 120582119894119891 (119878)119878 = 120583119865119911119894
2radic11986221199091198941205822119894 + 1198622119910119894tan2120572119894(1 minus 1205822119894 )
119891 (119878) = 1 S gt 1119878 (2 minus 119878) S lt 1
(10)
Cxi and Cyi are the longitudinal and lateral corner stiffness ofthe tire 120583 is the road adhesion coefficient maximum frictioncoefficient 120582i is the slip ratio and ai is the slip angle of thewheels In this study the value of 120583 is 085 therefore thebus lateral motion risk is the rollover rather than sideslipThe longitudinal wheel slip ratio 120582i can be obtained fromTruckSim
3 LTR Prediction Methodology
31 Grey Model Among the grey model types the one suit-able for LTR prediction is the GM(1 1) type meaning ldquofirst-order one variablerdquo [9]This model is a time series forecastingmodel The differential equations of the GM(1 1) model arerenewed as data becomes available to the prediction
The grey prediction modelrsquos advantage is that just afew discrete data are necessary to characterize an unknownsystem The GM(1 1) steps are as follows [17]
(1) Sort the initial series of 119883(0) as 119883(0) = (119883(0)(1)119883(0)(2) 119883(0)(3) 119883(0)(119899)) 119883(0) is the series of LTR valuesthat can be obtained by the tapped delay block in SimulinkIn this study we set n as equal to 10(2) Generate the first-order accumulated generating anoperation (1-AGO) sequence The general form of 119883(1) is
Journal of Advanced Transportation 5
119883(1)(1) 119883(1)(2) 119883(1)(3) 119883(1)(119899) and the definition of 1-AGO of 119883(0) is
119883(1) (119896) = 119896sum119894=1
119883(0) (119894) = 119883(1) (119896 minus 1) + 119883(0) (119896) (11)
(3) Set the first-order original differential equation of119883(1) Suppose 119883(1) meets the equation below
119889119883(1)119889119905 + 119886119883(1) = 119887 (12)
This is the basic form of GM(1 1) where variable a andvariable b are coefficients Define variable 119886 = [119886 119887]119879
Its difference equation is
119883(0) (119896) + 119886119885(1) (119896) = 119887 119896 = 2 3 119899 (13)
119885(1)(119896) is called the background value and its equationis 1198851(119896) = 1205721198831(119896 minus 1) + (1 minus 120572)1198831(119896)120572 is often set to 05Therefore according to the roots of this differential equationthe particular solution of (10) can be described as
119883(0) (119896) = (119883(0) (1) minus 119887119886 ) 119890minus119886119896 + b
119886 (14)
where 119883(0)(119896) is the predictive value of the series(4) Use the least square to obtain parameters a and bEquation (15) can be written as
119883(0) (119896 + 1) = 119886 [minus 12 (119883 (1) (119896 + 1) + 119883 (1) (119896))] + 119887
119896 ge 119899[119886
119887 ] = (119861119879119861)minus1 119861119879119884119899(15)
where
119861 =[[[[[[[
minus (119883(1) (1) + 119883(1) (2))minus (119883(1) (2) + 119883(1) (3))
minus (119883(1) (119899 minus 1) + 119883(1) (119899))
]]]]]]]
(16)
and
Yn = (119883(0) (2) 119883(0) (3) 119883(0) (119899)) (17)
(5) Estimate the AGO value X1(1) and insert a and b into(8) in order to obtain the particular solution of the differentialequation
As a result the recovery of the predictive value can beacquired by the following equation
119883(0) (119896) = 119883(1) (119896) minus 119896minus1sum119894=1
119883(0) (119894) (18)
32 Buffer Operator During some severe handling tests theLTR value changes rapidly This results in the predictivevalues growing fast and causing unintended local peaks in theprediction curve For this reason it is necessary to mitigatethe growth trend among the time sequence to obtain smoothpredictive curves
X(0) is the delayed LTR data series D is the greybuffer operator applied to X(0) and XD = (X(1)d1X(2)d2 X(n)dn) is the sequence after the function of the operatorD on X D is called the sequence operator and XD is the first-order operator acting sequences 119863 = (1198891 1198892 119889119899)
Basic knowledge about the weakening buffer operatorwhen D meets the three conditions below D can be calleda weakening buffer operator [18] otherwise it cannot be
(a) If X is a monotonic increasing series
B is a weakening buffer operator lArrrArr X(k)leX(k)dk
(b) If X is a monotonic decreasing series
D is a weakening buffer operator lArrrArr X(k)geX(k)dk
(c) If X is a vibrational series
min1le119896le119899
119909 (119896) le min1le119896le119899
119909 (119896) 119889119896and max1le119896le119899
119909 (119896) ge max1le119896le119899
119909 (119896) 119889119896 (19)
D is a weakening buffer operatorIn this study a buffer operator was utilized as below119883(119896)119863 = (119883(119899))120588(119883(119896))(1 minus 120588) 119896 = 1 2 3 119899 D is
a buffer operator and 120588 is the weight of X(n) In this paperthe prediction results could reach a balance between the ideallead time and the smoothness of the prediction curve whenthe value of the weight variable 120588 was 08
33 Real-Time LTR Prediction The simulation works of LTRprediction were implemented in the TruckSim and Simulinkco-atmosphere The TruckSim software can provide a built-in bus model with dynamic outputs that are very close to thefiltered data acquired from a real running bus Figure 8 showsthe LTR prediction process using the grey model which isan open loop The lateral acceleration and roll angles -119860119910and 120601119903 were exported in real time from TruckSim and thenutilized by the LTR equation to obtain an estimated LTRThe tapped delay block was utilized to delay and save theLTR values of a continuous time period and the LTR serieswas sent to the next process At first 10 continuous datawere acquired in real time To avoid the results being infinityor not being a number we set the initial LTR data as 001We used a heuristic method to find that 10 was a suitablenumber If n is over 10 the series contains too much oldinformation which will have a side effect on the predictionresult if n is less than 10 the number is not enough to give areasonable prediction result Before the grey model processthe buffer operator was used on (119883(0)(1) 119883(0)(2) 119883(0)(119899))
6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Journal of Advanced Transportation
Table 1 Some parameters of the bus in TruckSim
Sprung mass (mkg) 7690Bus width (dm) 193Distance from the sprung mass CG to the assumed roll axis (hVerticalm) 0563
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 5 Estimated versus TruckSim load transfer ratio (LTR) with89 kmh Sindwell at 90∘ steering amplitude
0 1 2 3 4 5 6 7 8 9 10minus100
minus50
0
50
100
150
Time (s)
Stee
ring
whe
el an
gle
Figure 6 Steering wheel angle with 105 kmh double lane change(DLC)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Est-LTRAct-LTR
Figure 7 Estimated versus TruckSim LTR with 105 kmh DLC
test which was conducted according to ISO 3888-22002 [15]Figure 7 demonstrates the comparison of the Est-LTR andAct-LTR under a test of a 105-kmh DLC the figure indicatesa slight lead time with the Est-LTR reaching 07 at 3841s and Act-LTR reaching at 3852 s Hence the estimationequation was valid as the reference formulation for a rollover
prevention system As a result in the following sections weconsidered the Est-LTR as the actual LTR
22 TireModel To calculate the tire forces this study utilizedthe Dugoff tire model which is a nonlinear tire model Com-pared with some empirical tire models such as the ldquomagicformulardquo (MF) model which require a large number of tire-specific parameters that are probably unknown the Dugoffmodel by simple equations can acquire the longitudinal andlateral tire-road forces under different wheel slip conditions[16]
Lateral and longitudinal tire-road forces can be defined as
119865119910119894 = 119862119910119894 tan 1205721198941 minus 120582119894 119891 (119878)
119865119909119894 = 1198621199091198941205821198941 minus 120582119894119891 (119878)119878 = 120583119865119911119894
2radic11986221199091198941205822119894 + 1198622119910119894tan2120572119894(1 minus 1205822119894 )
119891 (119878) = 1 S gt 1119878 (2 minus 119878) S lt 1
(10)
Cxi and Cyi are the longitudinal and lateral corner stiffness ofthe tire 120583 is the road adhesion coefficient maximum frictioncoefficient 120582i is the slip ratio and ai is the slip angle of thewheels In this study the value of 120583 is 085 therefore thebus lateral motion risk is the rollover rather than sideslipThe longitudinal wheel slip ratio 120582i can be obtained fromTruckSim
3 LTR Prediction Methodology
31 Grey Model Among the grey model types the one suit-able for LTR prediction is the GM(1 1) type meaning ldquofirst-order one variablerdquo [9]This model is a time series forecastingmodel The differential equations of the GM(1 1) model arerenewed as data becomes available to the prediction
The grey prediction modelrsquos advantage is that just afew discrete data are necessary to characterize an unknownsystem The GM(1 1) steps are as follows [17]
(1) Sort the initial series of 119883(0) as 119883(0) = (119883(0)(1)119883(0)(2) 119883(0)(3) 119883(0)(119899)) 119883(0) is the series of LTR valuesthat can be obtained by the tapped delay block in SimulinkIn this study we set n as equal to 10(2) Generate the first-order accumulated generating anoperation (1-AGO) sequence The general form of 119883(1) is
Journal of Advanced Transportation 5
119883(1)(1) 119883(1)(2) 119883(1)(3) 119883(1)(119899) and the definition of 1-AGO of 119883(0) is
119883(1) (119896) = 119896sum119894=1
119883(0) (119894) = 119883(1) (119896 minus 1) + 119883(0) (119896) (11)
(3) Set the first-order original differential equation of119883(1) Suppose 119883(1) meets the equation below
119889119883(1)119889119905 + 119886119883(1) = 119887 (12)
This is the basic form of GM(1 1) where variable a andvariable b are coefficients Define variable 119886 = [119886 119887]119879
Its difference equation is
119883(0) (119896) + 119886119885(1) (119896) = 119887 119896 = 2 3 119899 (13)
119885(1)(119896) is called the background value and its equationis 1198851(119896) = 1205721198831(119896 minus 1) + (1 minus 120572)1198831(119896)120572 is often set to 05Therefore according to the roots of this differential equationthe particular solution of (10) can be described as
119883(0) (119896) = (119883(0) (1) minus 119887119886 ) 119890minus119886119896 + b
119886 (14)
where 119883(0)(119896) is the predictive value of the series(4) Use the least square to obtain parameters a and bEquation (15) can be written as
119883(0) (119896 + 1) = 119886 [minus 12 (119883 (1) (119896 + 1) + 119883 (1) (119896))] + 119887
119896 ge 119899[119886
119887 ] = (119861119879119861)minus1 119861119879119884119899(15)
where
119861 =[[[[[[[
minus (119883(1) (1) + 119883(1) (2))minus (119883(1) (2) + 119883(1) (3))
minus (119883(1) (119899 minus 1) + 119883(1) (119899))
]]]]]]]
(16)
and
Yn = (119883(0) (2) 119883(0) (3) 119883(0) (119899)) (17)
(5) Estimate the AGO value X1(1) and insert a and b into(8) in order to obtain the particular solution of the differentialequation
As a result the recovery of the predictive value can beacquired by the following equation
119883(0) (119896) = 119883(1) (119896) minus 119896minus1sum119894=1
119883(0) (119894) (18)
32 Buffer Operator During some severe handling tests theLTR value changes rapidly This results in the predictivevalues growing fast and causing unintended local peaks in theprediction curve For this reason it is necessary to mitigatethe growth trend among the time sequence to obtain smoothpredictive curves
X(0) is the delayed LTR data series D is the greybuffer operator applied to X(0) and XD = (X(1)d1X(2)d2 X(n)dn) is the sequence after the function of the operatorD on X D is called the sequence operator and XD is the first-order operator acting sequences 119863 = (1198891 1198892 119889119899)
Basic knowledge about the weakening buffer operatorwhen D meets the three conditions below D can be calleda weakening buffer operator [18] otherwise it cannot be
(a) If X is a monotonic increasing series
B is a weakening buffer operator lArrrArr X(k)leX(k)dk
(b) If X is a monotonic decreasing series
D is a weakening buffer operator lArrrArr X(k)geX(k)dk
(c) If X is a vibrational series
min1le119896le119899
119909 (119896) le min1le119896le119899
119909 (119896) 119889119896and max1le119896le119899
119909 (119896) ge max1le119896le119899
119909 (119896) 119889119896 (19)
D is a weakening buffer operatorIn this study a buffer operator was utilized as below119883(119896)119863 = (119883(119899))120588(119883(119896))(1 minus 120588) 119896 = 1 2 3 119899 D is
a buffer operator and 120588 is the weight of X(n) In this paperthe prediction results could reach a balance between the ideallead time and the smoothness of the prediction curve whenthe value of the weight variable 120588 was 08
33 Real-Time LTR Prediction The simulation works of LTRprediction were implemented in the TruckSim and Simulinkco-atmosphere The TruckSim software can provide a built-in bus model with dynamic outputs that are very close to thefiltered data acquired from a real running bus Figure 8 showsthe LTR prediction process using the grey model which isan open loop The lateral acceleration and roll angles -119860119910and 120601119903 were exported in real time from TruckSim and thenutilized by the LTR equation to obtain an estimated LTRThe tapped delay block was utilized to delay and save theLTR values of a continuous time period and the LTR serieswas sent to the next process At first 10 continuous datawere acquired in real time To avoid the results being infinityor not being a number we set the initial LTR data as 001We used a heuristic method to find that 10 was a suitablenumber If n is over 10 the series contains too much oldinformation which will have a side effect on the predictionresult if n is less than 10 the number is not enough to give areasonable prediction result Before the grey model processthe buffer operator was used on (119883(0)(1) 119883(0)(2) 119883(0)(119899))
6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 5
119883(1)(1) 119883(1)(2) 119883(1)(3) 119883(1)(119899) and the definition of 1-AGO of 119883(0) is
119883(1) (119896) = 119896sum119894=1
119883(0) (119894) = 119883(1) (119896 minus 1) + 119883(0) (119896) (11)
(3) Set the first-order original differential equation of119883(1) Suppose 119883(1) meets the equation below
119889119883(1)119889119905 + 119886119883(1) = 119887 (12)
This is the basic form of GM(1 1) where variable a andvariable b are coefficients Define variable 119886 = [119886 119887]119879
Its difference equation is
119883(0) (119896) + 119886119885(1) (119896) = 119887 119896 = 2 3 119899 (13)
119885(1)(119896) is called the background value and its equationis 1198851(119896) = 1205721198831(119896 minus 1) + (1 minus 120572)1198831(119896)120572 is often set to 05Therefore according to the roots of this differential equationthe particular solution of (10) can be described as
119883(0) (119896) = (119883(0) (1) minus 119887119886 ) 119890minus119886119896 + b
119886 (14)
where 119883(0)(119896) is the predictive value of the series(4) Use the least square to obtain parameters a and bEquation (15) can be written as
119883(0) (119896 + 1) = 119886 [minus 12 (119883 (1) (119896 + 1) + 119883 (1) (119896))] + 119887
119896 ge 119899[119886
119887 ] = (119861119879119861)minus1 119861119879119884119899(15)
where
119861 =[[[[[[[
minus (119883(1) (1) + 119883(1) (2))minus (119883(1) (2) + 119883(1) (3))
minus (119883(1) (119899 minus 1) + 119883(1) (119899))
]]]]]]]
(16)
and
Yn = (119883(0) (2) 119883(0) (3) 119883(0) (119899)) (17)
(5) Estimate the AGO value X1(1) and insert a and b into(8) in order to obtain the particular solution of the differentialequation
As a result the recovery of the predictive value can beacquired by the following equation
119883(0) (119896) = 119883(1) (119896) minus 119896minus1sum119894=1
119883(0) (119894) (18)
32 Buffer Operator During some severe handling tests theLTR value changes rapidly This results in the predictivevalues growing fast and causing unintended local peaks in theprediction curve For this reason it is necessary to mitigatethe growth trend among the time sequence to obtain smoothpredictive curves
X(0) is the delayed LTR data series D is the greybuffer operator applied to X(0) and XD = (X(1)d1X(2)d2 X(n)dn) is the sequence after the function of the operatorD on X D is called the sequence operator and XD is the first-order operator acting sequences 119863 = (1198891 1198892 119889119899)
Basic knowledge about the weakening buffer operatorwhen D meets the three conditions below D can be calleda weakening buffer operator [18] otherwise it cannot be
(a) If X is a monotonic increasing series
B is a weakening buffer operator lArrrArr X(k)leX(k)dk
(b) If X is a monotonic decreasing series
D is a weakening buffer operator lArrrArr X(k)geX(k)dk
(c) If X is a vibrational series
min1le119896le119899
119909 (119896) le min1le119896le119899
119909 (119896) 119889119896and max1le119896le119899
119909 (119896) ge max1le119896le119899
119909 (119896) 119889119896 (19)
D is a weakening buffer operatorIn this study a buffer operator was utilized as below119883(119896)119863 = (119883(119899))120588(119883(119896))(1 minus 120588) 119896 = 1 2 3 119899 D is
a buffer operator and 120588 is the weight of X(n) In this paperthe prediction results could reach a balance between the ideallead time and the smoothness of the prediction curve whenthe value of the weight variable 120588 was 08
33 Real-Time LTR Prediction The simulation works of LTRprediction were implemented in the TruckSim and Simulinkco-atmosphere The TruckSim software can provide a built-in bus model with dynamic outputs that are very close to thefiltered data acquired from a real running bus Figure 8 showsthe LTR prediction process using the grey model which isan open loop The lateral acceleration and roll angles -119860119910and 120601119903 were exported in real time from TruckSim and thenutilized by the LTR equation to obtain an estimated LTRThe tapped delay block was utilized to delay and save theLTR values of a continuous time period and the LTR serieswas sent to the next process At first 10 continuous datawere acquired in real time To avoid the results being infinityor not being a number we set the initial LTR data as 001We used a heuristic method to find that 10 was a suitablenumber If n is over 10 the series contains too much oldinformation which will have a side effect on the predictionresult if n is less than 10 the number is not enough to give areasonable prediction result Before the grey model processthe buffer operator was used on (119883(0)(1) 119883(0)(2) 119883(0)(119899))
6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Journal of Advanced Transportation
TruckSim S-Function
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR PredictionScope2
Figure 8 LTR prediction process
and the buffered sequence Dlowast(119883(0)(1) 119883(0)(2) 119883(0)(119899))was generatedOn the basis of the new sequence the five stepsof GM(1 1) were implemented to get the predicted series(119883(0)(1) 119883(0)(2) 119883(0)(119899) 119883(0)(119899+119891)) and 119883(0)(119899+119891)is the predicted LTR value During the predicted sequencethe preferred lead time is flowastTs where f and Ts represent theforward steps and the sample interval separately Hence ifit is assumed that Ts is 002 s and f is 10 then the preferredlead time is 02 s After the grey model process the futureLTR was obtained and stood as the reference value of earlierrollover detectionWhen a processing cycle ends the old dataare released and a new cycle begins The predicted LTR valueproduced by the grey model is called the GLTR
4 LTR Prediction Results
To examine how long the lead time can be generated by theGLTR index some comparison simulations are reported inthis section Under the cosimulation atmosphere high-riskrollover maneuvers were carried out to examine the differentperformances between the GLTR and LTR The chosentests were the Sindwell and DLC maneuvers Sindwell is atypical maneuver for testing a vehiclersquos lateral performancewhich was established by the National Highway TrafficSafety Administration (NHTSA) Concurrently the doublelane change maneuver has been adopted by many vehiclecompanies as another typical lateral procedure
In this part the forward prediction steps were all 10 andthe interval time was 002 s As a result the correspondingpreferred lead time was 02 s
41 Limiting Factor of GM(11) This part discusses the LTRprediction results without the buffer operator process Theprediction results for more complex handling tests such asthe DLC and Sindwell tests proved that GM(1 1) had asevere limitation The drawback was that if the predicted LTRwas saturated by the physical threshold the algorithm maygenerate a wrong warning or activate the control system evenat a safe driving speed
To demonstrate this issue a typical example of the85-kmh DLC test is presented in Figure 9 During thismaneuver the LTR threshold we set for rollover preventionwas 07 Nevertheless the actual LTR was about 06 meaningthat there was no actual rollover risk Under this practicalcircumstance there is no need to initiate the rollover preven-tion systems at this relatively safe driving speed However thepeak points of the prediction curves were (382 0985) and(586 1031) which were all above the threshold Due to thepeak point being over 07 the prediction curve will lead to theunnecessary initiation of the prevention system
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
1
Time (s)
LTR
Act-LTRGM(11)
Figure 9 Prediction results in 85-kmh DLC using GM(1 1)
0 1 2 3 4 5 6 7 8 9 100
02
04
06
08
Time (s)
LTR
Act-LTRGLTR
Figure 10 Prediction result for 85-kmh DLC using the grey LTR(GLTR)
As a result particularly at a lesser high speed the useof basic GM(1 1) in the LTR prediction has limiting factorsin serious rollover risk conditions where these predictionmutations will cause the unintended initiation of the rolloverprevention system This limiting factor prevents the greymodel from extending its application to the entire speedrange
To overcome this issue first the trend development in theold data series needed to be reduced As shown in Figure 10we used a buffer to shrink the data tendency before weapplied GM(1 1) to the real-time data series Therefore aftercombining GM(1 1) with the proposed buffer the GLTRalgorithm was formed
Figure 10 displays the effectiveness of the GLTR in the85-kmh DLC test Compared with Figure 9 the weakeningeffect was obvious causing the peak position to reduce from(586 1031) to (604 0661) which was very close to the peakposition (614 0623) of the Est-LTR As a result after the
Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 7
0 2 4 6 8 100
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 11 Prediction results for the 105-kmh DLC test
0 05 1 15 2 25 3 35 40
02
04
06
08
Time (s)
LTR
GLTRAct-LTR
Figure 12 Prediction results for the 89-kmh Sindwell test
Table 2 Prediction of GLTR efficacy
Tests T1 T1rsquo ΔT1A 105 kmh DLC 3841 s 3634 s 0207 sB 89 kmh Sindwell 1698 s 1521 s 0177 s
addition of a buffer operator the GLTR can overcome thelimiting factor of GM(1 1) by giving a reasonable predictionperformance at a secondary high speed for rollover-riskmaneuvers
42 Prediction Results of the GLTR In order to verify theeffectiveness of the GLTR for the target lead time 105-kmhDLC and 89-kmh Sindwell simulation tests were conductedusing the GLTR index The prediction results of these twomaneuvers are shown in Figures 11 and 12 T1 and T1rsquo arethe time points at which the Est-LTR and the GLTR reachthe threshold Table 2 provides a detailed description of theprediction results for these two maneuvers where the leadtimes were substantial During the 105-kmh DLC with therollover threshold set as 07 the lead time was 0207 sConcurrently during the 89-kmh Sindwell the lead timewas0177 s
Therefore after applying the GLTR index with the suffi-cient lead time the activation command could be triggered inadvance about 02 s GLTR performed better thanGM(1 1) inLTR prediction by acquiring enough lead time and reducingthe prediction crests Furthermore the new threshold signal
can be useful for additional warning systems or differential-based systems which will highly reduce the rollover risks
To further illustrate the efficacy of the GLTR the resultswere compared with other works We still use a 89-kmhSindwell maneuver as an example In [19] a predictive LTRindex PLTR was introduced Equation (20) is the basicexpression for the PLTR In the test future time Δt is 02 scorresponding to the preferred lead time in this study
1198751198711198791198771199050 (Δ119905) = 119871119879119877 (1199050) + 119871119877 (1199050) sdot Δ119905 (20)
The lead time of PLTRwas 0163s which is less than 0177s(using GLTR) proving GLTRrsquos efficacy
5 Further Verification
In addition to further examine the actual effectiveness of thisnew rollover index a Simulink model (an active differentialbraking system) was added to function as the rollover pre-vention system GLTR works as the threshold of the rolloverprevention action Figure 13 shows the control structure ofthe differential braking system Once the system detects thatthe GLTR has exceeded the threshold the actuator will beginto provide differential braking forces as the yawing momentintervention Fflb Ff rb are the front left and front right brakingforces Frlb Frrb are the rear left and rear right braking forcesOnce GLTR is over 07 the antirollover countermeasurebegins by adding an additional yawing moment
A 2-DOF vehicle model which is the so-called ldquobicyclemodelrdquo was used as the reference model
Based on the 2-DOF model and Formula (10) thereference yawing moment can be calculated as below
sum 119872119911119903 = 1198861198651199101 minus 1198871198651199102 = 11988611986211991011205721 minus 11988711986211991021205722 (21)
Therefore the additional moment can be obtained by theequation as below
Δ119872119911 = 119872119911 minus 119872119911119903 (22)
The differential braking is achieved by establishing aPID controller Aproportionalndashintegralndashderivative controller(PID controller) is a control loop feedbackmechanism widelyused in industrial control systems and a variety of otherapplications requiring continuously modulated control [20]The distinguishing feature of the PID controller is the abilityto use the three control terms of the proportional integraland derivative influence on the controller output to applyaccurate and optimal control
The overall control function can be expressed mathemat-ically as
119880 (119904) = 119870119901 (1 + 1119896119894119904 + 119870119889119904) 119864 (119904) (23)
where
Kp is the proportional gain a tuning parameterKi is the integral gain a tuning parameterKd is the derivative gain a tuning parameter
8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Journal of Advanced Transportation
2 DOF Vehicle Model
Vx(ms)Yaw Rate (rads)
Steering Angle
Ay
Roll Angle f(u)
LTR Estimation
Tapped Delay
10Delays EstLTR
fcnGLTR
LTR Prediction
+ndash PID(s)
PID Controller
AdditionalMoment WheelMoment
AdditionalMomentfcn
++gt
Switch
Constant
[0000]
L<
LF<
LL<
flb
TruckSim S-FunctionVehicle Code i_s
Figure 13 GLTR control system using PID controller
119864(119904) = 120574119890 minus 120574119903 is the error of yaw rate where 120574119890 and 120574119903 arethe measured raw rate and reference yaw rate
We used the yaw rate error as the control goal to calculatethe target yawing moment In (23) Kp = 290 Ki = 120 andKd = 24
According to steering characteristic of a bus Table 3 islisted for the selection of the braking wheel to achieve therequired yawing moment
To better understand the effectiveness ofGLTR estimatedLTR was also used as the threshold in the comparison sim-ulation tests This simulation tested the performances of theprevention system after the application of the GLTR and LTR
This part demonstrates the simulation results acquiredfrom the closed-loop cosimulation utilizing the GLTR indexstudied in this paper The cosimulation model included thebus model in TruckSim an active differential braking systembuilt in Simulink The active differentials obtained oppositemoment by adding extra braking torque on a certain wheelso that the vehicle was able to effectively control the roll andyaw motions
We used LTR and GTR as the threshold in the controllersseparately To validate theGLTR comparison simulation testswere carried out with TruckSim to find the impact of thenew controller The comparison was conducted among a buswith the control system off a bus with the LTR active anda bus with the GLTR active The simulation test was for the100-kmh ldquoSindwellrdquo maneuver with a 90∘ amplitude FirstFigure 14 shows the LTR prediction result using LTR Thepeak points of LTR and GLTR curves are (1608 0775) and(1802 0758) where there are 02 s between the two peakpoints
From Figure 15 the buses with the LTR and the GLTRmatched well until the midpoint of the second turn when theGLTR systems activated prior to the LTRThe peak points ofGLTR control and LTR control were reduced to (1639 0671)and (1727 0691) separately We could see that the GLTRcontrol could help the bus reach a steady state prior to thebus under LTR control The two curves reached zero at 255
LTRGLTR
Time (s)
LTR
08
07
06
05
04
03
02
01
00 05 1 15 20 25 30 35 40 45 50
Figure 14 Prediction results for the 100-kmh Sindwell test
Time (s)
LTR controlGLTR control
LTR
080706050403020100 05 1 15 20 25 30 35 40 45 50
Figure 15 Comparison result in the 100-kmh Sindwell test usingdifferential controllers
s and 272 s showing that the GLTR control could make thebus steady 017 s in advance
Figure 16 shows the comparison result of the roll anglesbetween the LTR control and GLTR control The GLTRcould help the bus reduce the yawing rate about 0035 radsremarkably reducing the possibilities of rollover
Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 9
Table 3 Braking strategy of a bus
Steering angle Δ120574 Steering property Braking wheel
gt 0 gt 0 oversteer Right frontlt 0 understeer Left rear
lt 0 gt 0 understeer Right rearlt 0 oversteer Left front
0 05 1 15 2 25 3 35 4 45 5minus03
minus02
minus01
0
01
02
Time (s)
Yaw
rate
(rad
s)
LTR controlGLTR control
Figure 16 Comparison result of the yaw rate in the 100-kmhSindwell test
6 Conclusions
This study demonstrated an LTR prediction algorithm forbus rollover systems Unlike existing methods that are basedon estimation algorithms the proposed algorithm couldgenerate a considerable lead time for rollover prevention sys-tems or warning systems This rollover index was the fusionof the grey model and a buffer operator that was introducedfor bus rollover detection The simulation study aimed atexamining the prediction effectiveness of the GLTR andits application possibility Some conclusions regarding thisapproach can be made as follows
(1) An LTR estimation equation was developed and thenverified to have a rather suitable agreement with theLTR definition formula that directly makes use of thevertical tire forces from TruckSim
(2) Lead times produced by the GLTR help the warningsystems activate in advance which will reduce thepossible risks of bus rollover
(3) Further simulation verification was carried out byapplying the GLTR in a differential-based systemCompared with the traditional LTR index the GLTRcould help the differential-based system have betterperformance and efficacy
(4) In the future for further promotion this new rolloverindex should be applied to a real rollover preventionsystem to conduct hardware in loop tests or roadassessments
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (Grant No 51278062)
References
[1] V Eyges J Padmanaban and G Stadter ldquoA comparative studyof rollover crashes involving passenger cars with and withoutelectronic stability control (ESC)rdquo SAE Technical Papers 2011
[2] M E Greene and V S Trent ldquoA predictive rollover sensorrdquo SAETechnical Papers 2002
[3] R D Ervin ldquoThe influence of size and weight variables on theroll stability of heavy duty trucksrdquo SAE Technical Papers 1983
[4] H Yu L Guvenc and U Ozguner ldquoHeavy duty vehicle rolloverdetection and active roll controlrdquo Vehicle System Dynamics vol46 no 6 pp 451ndash470 2008
[5] S Solmaz M Akar and R Shorten ldquoAdaptive rollover preven-tion for automotive vehicles with differential brakingrdquo IFACProceedings Volumes vol 41 no 2 pp 4695ndash4700 2008
[6] A Mayr G Klambauer T Unterthiner et al ldquoLarge-scale com-parison ofmachine learningmethods for drug target predictionon ChEMBLrdquo Chemical Science vol 9 no 24 pp 5441ndash54512018
[7] Z Liu H Li K Liu H Yu and K Cheng ldquoDesign of high-performance water-in-glass evacuated tube solar water heatersby a high-throughput screening based on machine learning Acombinedmodeling and experimental studyrdquo Solar Energy vol142 pp 61ndash67 2017
[8] Y Cheng F Wang P Zhang and J Hu ldquoRisk Prediction withElectronic Health Records A Deep Learning Approachrdquo inProceedings of the 2016 SIAM International Conference on DataMining pp 432ndash440 2016
[9] J L Deng ldquoIntroduction to grey system theoryrdquoThe Journal ofGrey System vol 1 no 1 pp 1ndash24 1989
[10] M Mao and E C Chirwa ldquoApplication of grey model GM(11)to vehicle fatality risk estimationrdquo Journal of TechnologicalForecasting amp Social Change vol 73 no 5 pp 588ndash605 2006
[11] A Manivanna Boopathi and A Abudhahir ldquoDesign of grey-verhulst sliding mode controller for antilock braking systemrdquoInternational Journal of Control Automation and Systems vol14 no 3 pp 763ndash772 2016
[12] S-J Huang and S-T Chao ldquoA new lateral impact warningsystem with grey predictionrdquo Proceedings of the Institution ofMechanical Engineers Part D Journal of Automobile Engineer-ing vol 224 no 3 pp 285ndash297 2010
10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Journal of Advanced Transportation
[13] T Chou and T-W Chu ldquoAn improvement in rollover detectionof articulated vehicles using the grey system theoryrdquo VehicleSystem Dynamics vol 52 no 5 pp 679ndash703 2014
[14] J Preston-Thomas and J H F Woodrooffe ldquoFeasibility Studyof a Rollover Warning Device for Heavy Trucksrdquo TransportCanada 1990
[15] S Wood Passenger CarsmdashTest Track for a Severe Lane-ChangeManeuvermdashPart 2 Obstacle avoidance The international orga-nization for standardization 2011
[16] T Hsiao ldquoRobust estimation and control of tire traction forcesrdquoIEEE Transactions on Vehicular Technology vol 62 no 3 pp1378ndash1383 2013
[17] S F Liu and Y Lin Grey Systems Theory and ApplicationsSpringer Berlin Germany 2010
[18] L F Wu S F Liu Y J Yang L Ma and H Liu ldquoMulti-variableweakening buffer operator and its applicationrdquo InformationSciences vol 339 pp 98ndash107 2016
[19] C Larish D Piyabongkarn V Tsourapas and R Rajamani ldquoAnew predictive lateral load transfer ratio for rollover preventionsystemsrdquo IEEETransactions onVehicular Technology vol 62 no7 pp 2928ndash2936 2013
[20] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom